
車載ラップタイム計測装置およびラップタイム計測方法
【課題】サーキット場側の計測設備や車両側の磁気センサを不要にすると共に、ラップタイムを計測するために必要とされる車両の運転者の入力操作を減らす。
【解決手段】車両の現在位置を表す位置情報を取得する車両位置取得部22と、周回コース内のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部21と、車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部25と、前記直線式と車両の位置情報とに基づき時間を計測するラップタイム計測部26とを備え、ゴール地点で車両進行方向と直交する方向にゴールラインが存在すると仮定して計算する。
【解決手段】車両の現在位置を表す位置情報を取得する車両位置取得部22と、周回コース内のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部21と、車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部25と、前記直線式と車両の位置情報とに基づき時間を計測するラップタイム計測部26とを備え、ゴール地点で車両進行方向と直交する方向にゴールラインが存在すると仮定して計算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両がサーキット場などで所定の周回コースを周回走行する際にラップタイムを計測するために用いられる車載ラップタイム計測装置およびラップタイム計測方法に関する。
【背景技術】
【0002】
例えばレース等の競技や運転の訓練や車両の走行試験などを行うために、車両が所定のサーキット場で予め決められた周回コースを多数回に渡って周回走行する際には、ドライバー等が実際の車両の走行状態を把握するために、周回コースを1回走行する毎の所要時間、すなわちラップタイムを計測する必要がある。
【0003】
このようなラップタイムを計測する従来技術については、例えば特許文献1に開示されている。すなわち、計測用のストップウオッチを車載器として車両に搭載し、周回コースの路面側に埋め込まれている磁気バーを車載器に設けられた磁気センサで検出する。つまり、周回コース内で磁気バーが埋め込まれている位置を車両が通過するたびに電気信号を発生できるので、電気信号が発生してから次に電気信号が発生するまでの所要時間を計測すればラップタイムが得られる。
【0004】
しかし、特許文献1に開示されたような特別なストップウオッチの車載器はサーキット場以外では使用されないので、サーキット走行を行うたびに車載器の取り付けや取り外しをその都度行うことになり作業が面倒である。そこで、例えば特許文献2に開示されたナビゲーション装置においては、特許文献1と同様のストップウオッチの機能をナビゲーション装置に搭載し、地図画面とサーキット用画面とを自動的に切り替えている。具体的には、車両の現在位置を検出し、現在位置から所定距離の範囲内で事前に登録されたサーキット場の有無を検索し、サーキット場が見つかった場合は自動的にサーキット用画面に切り替える。そして、サーキット用画面では特許文献1と同様のストップウオッチの機能を用いてラップタイムを計測し計測値を表示する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−122463号公報
【特許文献2】特開2010−38622号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1又は特許文献2の技術を利用する場合には、走行するサーキット場側の設備として路面に磁気バーが埋め込まれていなければならず、車両側には前記磁気バーを検出可能な磁気センサを搭載しなければならない。
【0007】
このような設備が存在しない場合には、車両の走行中に、ドライバーの手動操作によりゴール地点に到達する毎にストップウオッチのボタンを操作しなければラップタイムを計測できない。しかし、サーキット場で走行する車両のドライバーは運転操作に集中する必要があるのでゴールラインの位置に到達したことを認識して同じ位置で何回もボタン操作を行うのは非常に煩わしい作業である。しかも、ボタンの手動操作のタイミングと、実際に車両がゴールラインを通過したタイミングとの間にずれが生じるのは避けられず、計測されるラップタイムに誤差やばらつきが生じることになる。
【0008】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、ラップタイムを計測するためのサーキット場側の設備や車両側の磁気センサを不要にすると共に、ラップタイムを計測するために必要とされる車両の運転者の入力操作を減らすことが可能な車載ラップタイム計測装置およびラップタイム計測方法を提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、本発明に係る車載ラップタイム計測装置は、下記(1)〜(3)を特徴としている。
(1) 周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測する機能を含み車載器として構成される車載ラップタイム計測装置であって、
前記車両の現在位置を表す位置情報を取得する車両位置取得部と、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部と、
前記車両位置取得部が取得した車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部と、
前記直線式と前記車両位置取得部が取得した車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測するラップタイム計測部と
を備えること。
(2) 上記(1)に記載の車載ラップタイム計測装置であって、
前記信号入力部は、前記車両を運転するドライバーが操作可能な操作ボタンを含み、
前記ゴールライン算出部は、前記信号入力部の前記操作ボタンが操作された時に発生する前記ゴール到達信号が入力された時に、前記車両位置取得部が取得した位置情報の変化に基づき前記車両の移動方向を検出し、この時の車両の位置情報と検出された前記移動方向とに基づいて前記直線式を特定すること。
(3) 上記(1)に記載の車載ラップタイム計測装置であって、
前記ゴールライン算出部は、前記車両の周回毎に複数回に渡って前記ゴール到達信号が入力された場合には、前記ゴール到達信号が発生した各時点で得られた車両の複数の位置情報を平均化して前記直線式を修正すること。
【0010】
上記(1)の構成の車載ラップタイム計測装置によれば、前記ゴール地点を特定するために最低1回だけ前記ゴール到達信号を入力することにより前記ゴールラインが自動的に特定され、このゴールラインの位置を基準としてラップタイムが計測される。従って、運転者の入力操作を減らすことができるし、ボタン操作等のタイミングのばらつきの影響を受けにくいので、精度良くラップタイムを計測できる。
上記(2)の構成の車載ラップタイム計測装置によれば、操作ボタンをドライバー等が操作することにより前記ゴール地点の位置を特定でき、前記ゴール地点における車両の移動方向も特定できる。
上記(3)の構成の車載ラップタイム計測装置によれば、ラップタイムの計測に用いる前記ゴールラインの直線式を現実のゴールラインの位置に近づけることができる。すなわち、ボタンの手動操作などによってゴール地点を特定する場合には、操作タイミングに多少のずれが発生するのは避けられないが、複数回の操作タイミングで得られた位置情報を平均化することによりゴールラインの位置ずれを低減できる。
【0011】
前述した目的を達成するために、本発明に係るラップタイム計測方法は、下記(4)を特徴としている。
(4) 周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測するための機能を前記車両上で実現するためのラップタイム計測方法であって、
必要なタイミングで前記車両の現在位置を表す位置情報を取得し、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号が入力された時に、前記車両の位置情報の微小変化に基づいて前記車両の移動方向を検出し、
前記ゴール到達信号が入力されたタイミングで取得された前記車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出し、
前記直線式と前記車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測すること。
【0012】
上記(4)の構成のラップタイム計測方法によれば、前記ゴール地点を特定するために最低1回だけ前記ゴール到達信号を入力することにより前記ゴールラインが自動的に特定され、このゴールラインの位置を基準としてラップタイムが計測される。従って、運転者の入力操作を減らすことができるし、ボタン操作等のタイミングのばらつきの影響を受けにくいので、精度良くラップタイムを計測できる。
【発明の効果】
【0013】
本発明の車載ラップタイム計測装置およびラップタイム計測方法によれば、ラップタイムを計測するためにサーキット場側の設備として磁気バーを備えたり車両側に磁気センサを設ける必要がない。また、車両の運転者等に要求される操作は最低1回だけ前記ゴール到達信号を入力することだけであるので、運転者等の入力操作を減らすことができる。
【0014】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0015】
【図1】実施形態の車載ラップタイム計測装置の構成例を示すブロック図である。
【図2】図1の車載ラップタイム計測装置の外観を示す正面図である。
【図3】図2の車載ラップタイム計測装置の表示内容の具体例を示す正面図である。
【図4】平面内における車両と走行路とゴールラインとの間の位置及び方向の関係を表す模式図である。
【図5】図1の車載ラップタイム計測装置の主要な動作を表すフローチャートである。
【図6】図5中のゴールライン位置演算処理の詳細を表すフローチャートである。
【図7】ゴールライン位置補正処理を表すフローチャートである。
【発明を実施するための形態】
【0016】
本発明の車載ラップタイム計測装置およびラップタイム計測方法に関する具体的な実施の形態について、各図を参照しながら以下に説明する。
【0017】
本実施形態の車載ラップタイム計測装置の構成例が図1に示されている。また、図1の車載ラップタイム計測装置の外観が図2に示されている。本実施形態の車載ラップタイム計測装置は、図1および図2に示す車載器10に組み込まれ車両に搭載される。
【0018】
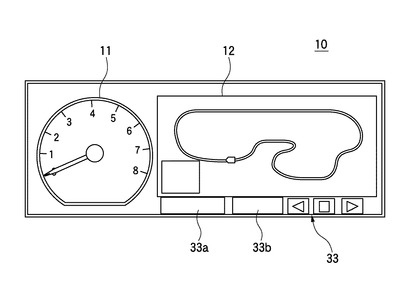
車載器10は、図2に示すような回転計(タコメータ)表示部11およびサーキット表示部12を表示可能な計器ユニットとして、車両の運転席前方のインストルメントパネル上の運転者(ドライバー)から見やすい位置に設置される。また、この車載器10には運転者が操作可能な複数のボタン(スイッチ)33a、33b等を有する操作部33が設けられている。
【0019】
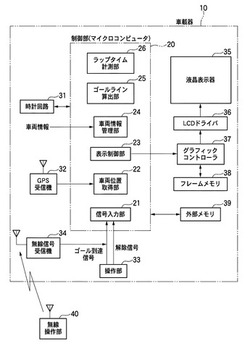
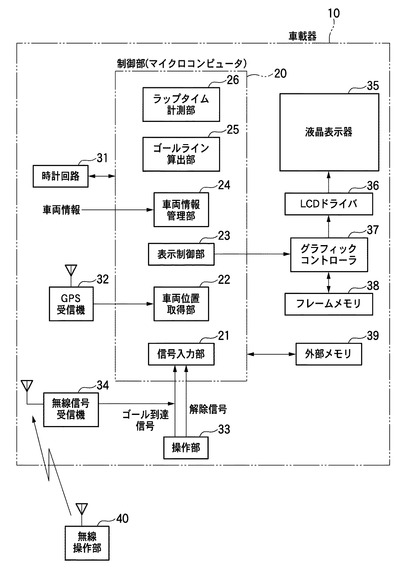
図1に示すように、車載器10は制御部20、時計回路31、GPS受信機32、操作部33、無線信号受信機34、液晶表示部35、LCDドライバ36、グラフィックコントローラ37、フレームメモリ38、および外部メモリ39を備えている。
【0020】
制御部20は所定のマイクロコンピュータを主体として構成されている。また、制御部20の内部に予め用意されているプログラムをマイクロコンピュータが実行することにより、図1に示された信号入力部21、車両位置取得部22、表示制御部23、車両情報管理部24、ゴールライン算出部25、ラップタイム計測部26の各機能が実現される。
【0021】
時計回路31は、周期が一定の所定のクロックパルスを計数することにより現在時刻を常時把握することができる。また、制御部20の制御によりある時点から別のある時点までの時間を計測したり計測の結果や時刻を表す情報を出力することができる。
【0022】
GPS受信機32は、複数のGPS(Global Positioning System)衛星から受信した電波の到達時間に基づいてこれを搭載した車両の現在位置を計算により把握することができる。車両の現在位置の情報は、緯度および経度を表す座標として出力される。
【0023】
操作部33は、運転者が操作可能な図2に示したボタン33a、33b等を含んでいる。ボタン33aが操作されるとゴール到達信号が発生し、ボタン33bが操作されると解除信号が発生する。後述するように、ボタン33aはラップタイムを計測する前にゴール地点に車両が到達したタイミングで運転者によって少なくとも1回押下される。
【0024】
無線信号受信機34は、車両外部からの無線信号を受信するために設けてある。すなわち、無線操作部40を所持する車両外の計測者が無線操作部40上のボタンを操作した場合に発生する無線信号(電波あるいは赤外線などの信号)を無線信号受信機34が受信すると、運転者がボタン33aを操作しなくても無線信号受信機34がゴール到達信号を発生する。なお、無線信号受信機34の搭載は省略しても良い。
【0025】
液晶表示部35は、二次元画面上に文字、図形、画像等の様々な情報を必要に応じて表示可能なディスプレイであり、例えば図2に示した回転計表示部11やサーキット表示部12を表示することができる。
【0026】
液晶表示部35に表示される情報の内容は、フレームメモリ38に書き込まれた情報によって決定される。実際に表示する内容は、制御部20の表示制御部23が決定し、制御部20とグラフィックコントローラ37との通信内容に従ってフレームメモリ38に書き込まれる。フレームメモリ38の内容は、LCDドライバ36を経由して液晶表示部35の表示に反映される。
【0027】
外部メモリ39は、不揮発性メモリであり、様々な情報を予め保持している。例えば、主要なサーキット場のそれぞれについて各コースの形状や位置などを表す情報が事前に外部メモリ39に登録され、図2に示すサーキット表示部12の内容を表示する際にこの情報が利用される。
【0028】
図1に示す信号入力部21は、操作部33のボタン操作又は無線信号受信機34が受信した無線信号によって操作部33又は無線信号受信機34から出力されるゴール到達信号や解除信号の入力を受け付ける。
【0029】
車両位置取得部22は、周期的にあるいは指定されたタイミングでGPS受信機32に指示を与え、現在の車両位置を表す最新の位置情報(緯度/経度)を取得する。
【0030】
車両情報管理部24は、車両上の各部から出力される様々な車両情報を周期的に取得し管理する。例えば、エンジンの回転数(rpm)、変速機のシフト位置、車速(km/h)、冷却水温度などの車両情報が車両情報管理部24によって管理される。
【0031】
ゴールライン算出部25は、予め定めたゴールラインの位置などを特定するための処理を行う。この処理の内容については後で詳細に説明する。ラップタイム計測部26は、ゴールライン算出部25が特定したゴールラインに基づいてラップタイムを算出する。すなわち、車両がゴールラインを横切ってから周回コースを1回周回して再びゴールラインに到達するまでの時間をラップタイムとして算出する。
【0032】
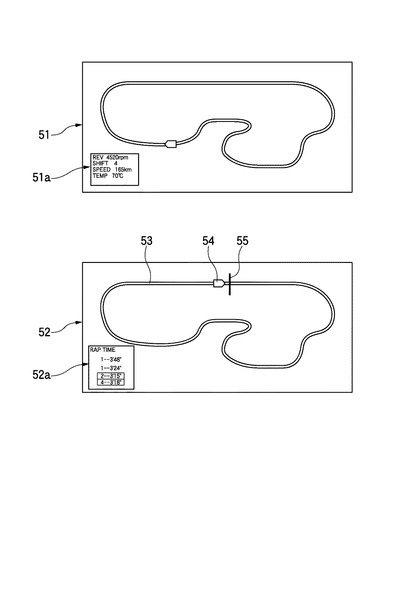
表示制御部23は、必要に応じて様々な情報を液晶表示部35の画面上に表示するための処理を行う。例えば、図3に示すサーキット表示画面51やサーキット表示画面52を液晶表示部35のサーキット表示部12に表示する。
【0033】
図3に示すサーキット表示画面51には、サーキット場の周回コースの形状とコース上の車両を表すグラフィック情報と、車両状態表示部51aが含まれている。車両状態表示部51aには、現在の車両の状態を表す情報として、エンジンの回転数(4520rpm)、変速機のシフト位置(4)、車速(165km/h)、冷却水温度(70℃)を表す文字情報が表示されている。
【0034】
また、図3に示すサーキット表示画面52には、サーキット場の周回コースの形状を表す走行路表示53と、コース上の車両表示54と、ゴールライン表示55と、ラップタイム表示部52aとが含まれている。
【0035】
なお、サーキット場の周回コースの形状や位置については、事前に登録されたデータを外部メモリ39から読み出すことにより特定できる。また、コース上の車両の位置については、車両位置取得部22がGPS受信機32から取得した車両位置の情報を用いて特定できる。ゴールライン表示55については、ゴールライン算出部25が特定したゴールラインの情報を用いて位置や方向を特定できる。
【0036】
ラップタイム表示部52aには、ラップタイム計測部26の計測により得られた周回毎のラップタイムが表示される。図3に示すラップタイム表示部52aの例では、1周目のラップタイム(3’48”)、2周目のラップタイム(3’15”)、3周目のラップタイム(3’24”)、4周目のラップタイム(3’18”)が表示されている。更に、最速である2周目のラップタイムと、最新の4周目のラップタイムについては、それぞれ表示色を切り替えて他のラップタイムと区別し易いように表示してある。
【0037】
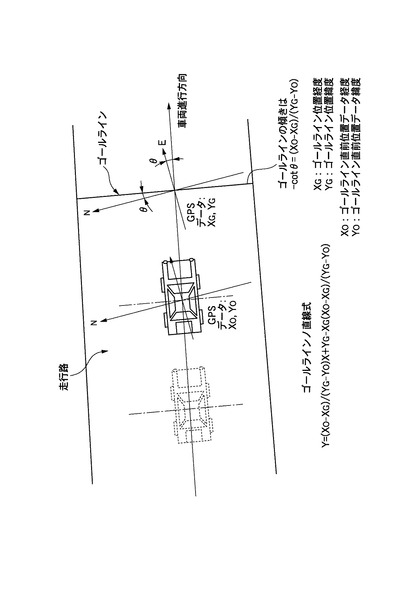
平面内における車両と走行路とゴールラインとの間の位置及び方向の関係が図4に示されている。図4に示すように、一般的なゴールラインは走行路を横断する方向に延びる直線的な区切り位置であり、走行路の幅方向の一端から他端まで存在している。また、走行路はある程度の幅を有しているので、車両がゴールラインを横切る時に、ゴールライン上のどの位置を通過するかは決まっていない。但し、周回コースであってもゴールラインは走行路の直線状の箇所に設けられるので、車両がゴールラインに接近している状況においては、車両の進行方向がゴールラインの方向と直交する方向を向いていると考えられる。そこで、後述するように図1に示したゴールライン算出部25は、ゴール地点近傍の車両の進行方向からゴールラインの方向を特定する。
【0038】
図1に示した車載ラップタイム計測装置の主要な動作が図5に示されている。また、図5中のゴールライン位置演算処理(S16)の詳細が図6に示されている。図5、図6に示す動作について以下に説明する。
【0039】
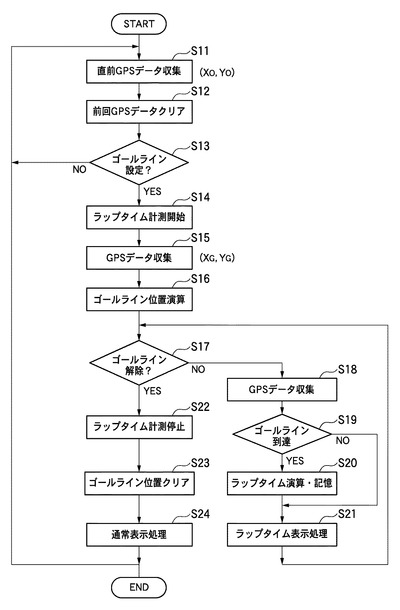
ステップS11では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ(経度:Xo,緯度:Yo)を取得する。過去にステップS11で取得した車両位置データについては不要なので次のステップS12でクリアする。
【0040】
ステップS13では、制御部20の信号入力部21が、操作部33又は無線信号受信機34からゴール到達信号が入力されたか否かを識別する。ゴール到達信号が入力されていない時には、ステップS13からS11に戻る。従って、その場合はステップS11における車両位置データの取得を一定の周期で繰り返すことになる。ゴール到達信号が入力されると、ゴールライン設定指示ありとみなしてステップS13からS14に進む。
【0041】
すなわち、図1に示す車載器10を用いてラップタイムの計測を開始しようとする場合には、この車両が周回コースを走行中に予め定められたゴール地点に到達したことを認識したタイミングで、この車両を運転するドライバー、もしくは車外で無線操作部40を操作可能な人物が、操作部33上のボタン33aもしくは無線操作部40上のボタンを押下してゴール到達信号を出力する。このゴール到達信号が信号入力部21に入力された時にステップS14の処理に進む。
【0042】
ステップS14では、制御部20のラップタイム計測部26がラップタイムの計測を開始する。例えば、時計回路31の時間計測機能を利用する場合には、時間の計数値をクリアして経過時間の計数を開始する。あるいは、現在時刻の情報を計測開始時(ゴールライン通過時)の時刻として時計回路31から取得する。
【0043】
ステップS15では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ、すなわちゴール地点を表す位置データ(経度:Xg,緯度:Yg)を取得する。
【0044】
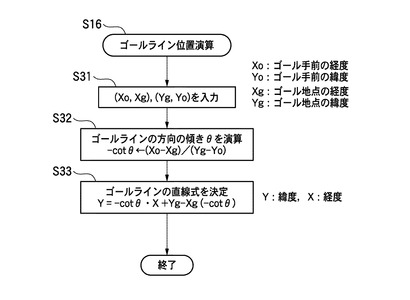
ステップS16では、制御部20のゴールライン算出部25が、ゴールラインを特定するために図6に示すような処理を行う。図6のステップS31では、ステップS15で取得したゴール地点の位置データ(経度:Xg,緯度:Yg)と、ゴール地点に到達する直前(ゴールより少し手前)のタイミングでステップS11で取得した車両位置データ(経度:Xo,緯度:Yo)とをゴールライン算出部25が入力する。
【0045】
ステップS32では、ゴールラインを表す直線の方向の緯度/経度座標軸に対する傾きθをゴールライン算出部25が演算する。図4に示すように、ゴール地点(Xg,Yg)の近傍においては、ゴールラインを表す直線の方向は、車両の進行方向に対して垂直な方向を向いていると考えられる。この場合の車両の進行方向については、例えばゴール手前位置(Xo,Yo)からゴール地点(Xg,Yg)まで車両が移動する間の移動方向として、経度の微小変化Δx(=Xo−Xg)および緯度の微小変化Δy(=Yg−Yo)に基づいて求めることができる。すなわち、緯度方向の軸に対するゴールラインの直線の傾きを表す角度θについては、次式で表される。
−cotθ=(Xo−Xg)/(Yg−Yo) ・・・(1)
【0046】
ステップS33では、ステップS32で求めた傾きの角度θを利用してゴールラインを表す直線式を決定する。すなわち、この直線式は次式で表される。
Y=−cotθ・X+Yg−Xg(−cotθ) ・・・(2)
【0047】
上記の処理によりゴールラインを表す直線式を決定した後で図5のステップS17に進む。ステップS17では、ゴールラインの解除指示があったかどうかを信号入力部21が識別する。すなわち、操作部33のボタン33bの操作によって発生する解除信号が信号入力部21に入力されたか否かをステップS17で識別し、解除信号が入力された場合はステップS22に、入力されていなければステップS18に進む。
【0048】
ステップS18では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ(経度:Xo,緯度:Yo)を取得する。ラップタイムの計測中にはステップS18の処理が短い周期で繰り返し実行され、最新の車両位置データが逐次入力される。
【0049】
ステップS19では、ステップS16で特定したゴールラインの位置に車両が到達したかどうかをラップタイム計測部26が識別する。すなわち、ステップS18で取得した最新の車両位置(経度:Xo,緯度:Yo)と前記第(2)式で表されるゴールラインの直線式とを比較し、車両が周回コースを1周走行した後でゴールラインを横切る位置まで車両位置が到達したか否かを識別する。到達した場合はステップS20に進み、到達してなければステップS21に進む。
【0050】
ステップS20では、ラップタイム計測部26がラップタイムの演算及びその結果を表すデータの保存処理を行う。例えば、現在の時刻を時計回路31から取得し、前回ゴールラインを横切った時に取得した時刻と現在の時刻との差分である周回コース1周の所要時間をラップタイムとして算出する。また、同時に計測値をクリアして次の周回に関するラップタイムの計測を開始する。
【0051】
ステップS21では、ステップS20で得られたラップタイムの値を、表示制御部23が液晶表示部35の画面上に表示する。例えば、既に4周分のラップタイムの計測値が取得済みである場合には、図3に示すサーキット表示画面52内のラップタイム表示部52aのように、4周分の周回毎のラップタイムを一覧として並べて表示する。また、ステップS16で得られたゴールラインの直線式を利用して、図3のようにゴールライン表示55を周回コースの走行路表示53上に表示する。
【0052】
ステップS22では、ラップタイム計測部26がラップタイムの計測を停止する。次のステップS23では、ゴールライン算出部25がステップS16で決定したゴールラインの直線式を無効化する。
【0053】
ステップS24では、表示制御部23が液晶表示部35の表示内容を変更し、図3に示すサーキット表示画面52の状態からサーキット表示画面51の状態に切り替える。サーキット表示画面51においては、ラップタイム以外の車両の状態を表す情報が車両状態表示部51aに表示される。
【0054】
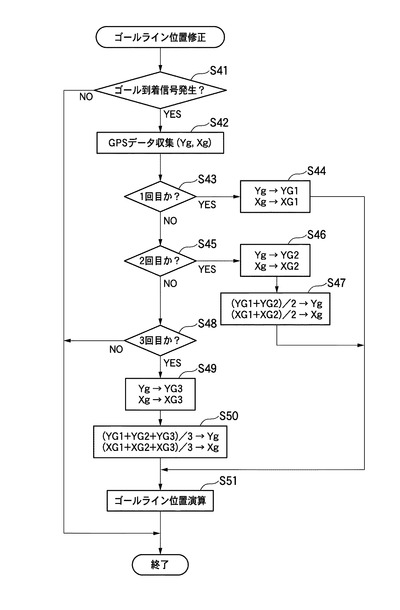
ところで、図1に示した操作部33のボタン33aを運転者等が手動で操作してゴール地点を車載器10に入力する場合には、運転者がゴール地点を認識するタイミングにばらつきが生じるし、ゴール地点を認識してから実際にボタン33aを操作して前述のゴール到達信号が発生するまでの時間にもばらつきが生じる。そのため、ボタン操作によって入力されたゴール地点と実際のゴール地点との間に誤差が発生する。このような誤差を減らすための処理の具体例が図7に示されている。この処理は制御部20のマイクロコンピュータにより実行される。
【0055】
図7に示すゴールライン位置補正処理においては、信号入力部21がゴール地点を特定するためのボタン33aの入力操作を複数回受け付ける。そして、複数回の入力操作によりそれぞれ取得されるゴール地点の位置を平均化することにより、ゴールラインの位置の誤差を減らすことができる。図7に示す処理の内容について以下に説明する。
【0056】
前述のように周回コースを走行中の車両上において、ゴールラインを横切る時に運転者が操作部33のボタン33aを押下するとゴール到達信号が発生する。ゴール到達信号が発生する度に、図7のステップS41からS42に進む。
【0057】
ステップS42では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ、すなわちゴール地点を表す位置データ(経度:Xg,緯度:Yg)を取得する。
【0058】
ステップS43、S45、S48では、信号入力部21に今回入力された信号が何回目のゴール到達信号かを識別する。1回目のゴール到達信号であればステップS43からS44に進み、2回目のゴール到達信号であればステップS45からS46に進み、3回目のゴール到達信号であればステップS48からS49に進む。
【0059】
ステップS44では、今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を、内部メモリ上に設けた1番目のレジスタYG1,XG1に格納し保存する。同様に、ステップS46では今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を2番目のレジスタYG2,XG2に格納し、ステップS49では今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を3番目のレジスタYG3,XG3に格納する。
【0060】
また、ステップS47では、レジスタYG1,YG2の値の平均値によりゴール地点の緯度Ygの値を更新し、レジスタXG1,XG2の値の平均値によりゴール地点の経度Xgの値を更新する。
【0061】
同様に、ステップS50では、レジスタYG1,YG2,YG3の値の平均値によりゴール地点の緯度Ygの値を更新し、レジスタXG1,XG2,XG3の値の平均値によりゴール地点の経度Xgの値を更新する。
【0062】
図7のステップS51では、図5のステップS16と同様の処理を行い、ゴール地点の位置座標(Yg,Xg)に基づいてゴールラインを表す直線式を特定する。従って、2回目のゴール到達信号が入力された時には、1回目に検出されたゴール地点の座標(YG1,XG1の内容)と2回目に検出されたゴール地点の座標(YG2,XG2の内容)とを平均化した座標に基づいてゴールラインの直線式が決定される。また、3回目のゴール到達信号が入力された時には、1回目に検出されたゴール地点の座標(YG1,XG1の内容)と2回目に検出されたゴール地点の座標(YG2,XG2の内容)と3回目に検出されたゴール地点の座標(YG3,XG3の内容)とを平均化した座標に基づいてゴールラインの直線式が決定される。
【0063】
つまり、周回コース上を走行する車両がゴール地点に到達する毎に、複数回に渡ってボタン33aが押下されると、ゴール地点に到達するたびに検出されるゴール地点の位置座標が平均化され、その結果がゴールラインの直線式に反映されるので、位置の誤差を減らすことができる。なお、ゴールラインの直線式が更新された時に、それ以前に測定された各ラップタイムの値を、正しいゴールラインの位置に合うように計算によって補正することも可能である。
【0064】
なお、図5に示すステップS15で検出されるゴール地点の座標(Xg,Yg)とその直前にステップS11で検出された車両位置の座標(Xo,Yo)とを用いて車両の進行方向を求める必要があるので、算出される進行方向の精度を確保するために、座標(Xg,Yg)と座標(Xo,Yo)との間に所定以上の距離が必要になる。この距離を十分に確保できるように、車両の一般的な走行速度を考慮してステップS11の実行を繰り返す周期の長さが決定される。
【0065】
なお、例えばゴールライン上の1点の座標が既知のデータとして車載器10上に予め入力されているような場合には、図5、図6の「ゴールライン位置演算」処理において、ゴール地点として既知のデータを採用し、これと車両の進行方向から求められる傾きθとを用いてゴールラインの直線式を特定すればよい。
【0066】
いずれにしても、運転者等が周回コース上のゴール地点で少なくとも回の入力操作を行うことにより、自動的に車両の進行方向が検出され、ゴールラインを特定する直線式が決定されるので、非常に簡単な操作だけで半自動的にラップタイムを計測できる。
【0067】
上述のように、本発明の車載ラップタイム計測装置およびラップタイム計測方法は、サーキット場のような周回コース上を走行する自動車に搭載する車載器などに適用することが想定される。勿論、4輪の自動車だけでなく、2輪車すなわちオートバイや自転車など、あるいはその他の移動体に搭載する車載器として利用することも想定できる。
【0068】
また、前述の車載器10はラップタイムを計測する機能を搭載しているが、この機能を省略しても良い。すなわち、ラップタイムを計測しなくても、例えば車両がゴールラインに到達した時にその時刻の情報を取得する必要があるような場合に、ゴールラインを特定する方法として本発明を利用できる。
【0069】
本発明の実施形態を説明するに当たって、サーキット場のような周回コース上のゴールラインに本発明を適用する場合について説明した。しかし、本発明は周回コースに限られるものではなく、始点及び終点の伴う任意の区間において、その始点におけるスタートラインまたはその終点におけるゴールラインを特定する方法として利用することができる。
【符号の説明】
【0070】
10 車載器
11 回転計表示部
12 サーキット表示部
20 制御部
21 信号入力部
22 車両位置取得部
23 表示制御部
24 車両情報管理部
25 ゴールライン算出部
26 ラップタイム計測部
31 時計回路
32 GPS受信機
33 操作部
34 無線信号受信機
35 液晶表示部
36 LCDドライバ
37 グラフィックコントローラ
38 フレームメモリ
39 外部メモリ
40 無線操作部
51,52 サーキット表示画面
51a 車両状態表示部
52a ラップタイム表示部
53 走行路表示
54 車両表示
55 ゴールライン表示
【技術分野】
【0001】
本発明は、車両がサーキット場などで所定の周回コースを周回走行する際にラップタイムを計測するために用いられる車載ラップタイム計測装置およびラップタイム計測方法に関する。
【背景技術】
【0002】
例えばレース等の競技や運転の訓練や車両の走行試験などを行うために、車両が所定のサーキット場で予め決められた周回コースを多数回に渡って周回走行する際には、ドライバー等が実際の車両の走行状態を把握するために、周回コースを1回走行する毎の所要時間、すなわちラップタイムを計測する必要がある。
【0003】
このようなラップタイムを計測する従来技術については、例えば特許文献1に開示されている。すなわち、計測用のストップウオッチを車載器として車両に搭載し、周回コースの路面側に埋め込まれている磁気バーを車載器に設けられた磁気センサで検出する。つまり、周回コース内で磁気バーが埋め込まれている位置を車両が通過するたびに電気信号を発生できるので、電気信号が発生してから次に電気信号が発生するまでの所要時間を計測すればラップタイムが得られる。
【0004】
しかし、特許文献1に開示されたような特別なストップウオッチの車載器はサーキット場以外では使用されないので、サーキット走行を行うたびに車載器の取り付けや取り外しをその都度行うことになり作業が面倒である。そこで、例えば特許文献2に開示されたナビゲーション装置においては、特許文献1と同様のストップウオッチの機能をナビゲーション装置に搭載し、地図画面とサーキット用画面とを自動的に切り替えている。具体的には、車両の現在位置を検出し、現在位置から所定距離の範囲内で事前に登録されたサーキット場の有無を検索し、サーキット場が見つかった場合は自動的にサーキット用画面に切り替える。そして、サーキット用画面では特許文献1と同様のストップウオッチの機能を用いてラップタイムを計測し計測値を表示する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−122463号公報
【特許文献2】特開2010−38622号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1又は特許文献2の技術を利用する場合には、走行するサーキット場側の設備として路面に磁気バーが埋め込まれていなければならず、車両側には前記磁気バーを検出可能な磁気センサを搭載しなければならない。
【0007】
このような設備が存在しない場合には、車両の走行中に、ドライバーの手動操作によりゴール地点に到達する毎にストップウオッチのボタンを操作しなければラップタイムを計測できない。しかし、サーキット場で走行する車両のドライバーは運転操作に集中する必要があるのでゴールラインの位置に到達したことを認識して同じ位置で何回もボタン操作を行うのは非常に煩わしい作業である。しかも、ボタンの手動操作のタイミングと、実際に車両がゴールラインを通過したタイミングとの間にずれが生じるのは避けられず、計測されるラップタイムに誤差やばらつきが生じることになる。
【0008】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、ラップタイムを計測するためのサーキット場側の設備や車両側の磁気センサを不要にすると共に、ラップタイムを計測するために必要とされる車両の運転者の入力操作を減らすことが可能な車載ラップタイム計測装置およびラップタイム計測方法を提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、本発明に係る車載ラップタイム計測装置は、下記(1)〜(3)を特徴としている。
(1) 周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測する機能を含み車載器として構成される車載ラップタイム計測装置であって、
前記車両の現在位置を表す位置情報を取得する車両位置取得部と、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部と、
前記車両位置取得部が取得した車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部と、
前記直線式と前記車両位置取得部が取得した車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測するラップタイム計測部と
を備えること。
(2) 上記(1)に記載の車載ラップタイム計測装置であって、
前記信号入力部は、前記車両を運転するドライバーが操作可能な操作ボタンを含み、
前記ゴールライン算出部は、前記信号入力部の前記操作ボタンが操作された時に発生する前記ゴール到達信号が入力された時に、前記車両位置取得部が取得した位置情報の変化に基づき前記車両の移動方向を検出し、この時の車両の位置情報と検出された前記移動方向とに基づいて前記直線式を特定すること。
(3) 上記(1)に記載の車載ラップタイム計測装置であって、
前記ゴールライン算出部は、前記車両の周回毎に複数回に渡って前記ゴール到達信号が入力された場合には、前記ゴール到達信号が発生した各時点で得られた車両の複数の位置情報を平均化して前記直線式を修正すること。
【0010】
上記(1)の構成の車載ラップタイム計測装置によれば、前記ゴール地点を特定するために最低1回だけ前記ゴール到達信号を入力することにより前記ゴールラインが自動的に特定され、このゴールラインの位置を基準としてラップタイムが計測される。従って、運転者の入力操作を減らすことができるし、ボタン操作等のタイミングのばらつきの影響を受けにくいので、精度良くラップタイムを計測できる。
上記(2)の構成の車載ラップタイム計測装置によれば、操作ボタンをドライバー等が操作することにより前記ゴール地点の位置を特定でき、前記ゴール地点における車両の移動方向も特定できる。
上記(3)の構成の車載ラップタイム計測装置によれば、ラップタイムの計測に用いる前記ゴールラインの直線式を現実のゴールラインの位置に近づけることができる。すなわち、ボタンの手動操作などによってゴール地点を特定する場合には、操作タイミングに多少のずれが発生するのは避けられないが、複数回の操作タイミングで得られた位置情報を平均化することによりゴールラインの位置ずれを低減できる。
【0011】
前述した目的を達成するために、本発明に係るラップタイム計測方法は、下記(4)を特徴としている。
(4) 周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測するための機能を前記車両上で実現するためのラップタイム計測方法であって、
必要なタイミングで前記車両の現在位置を表す位置情報を取得し、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号が入力された時に、前記車両の位置情報の微小変化に基づいて前記車両の移動方向を検出し、
前記ゴール到達信号が入力されたタイミングで取得された前記車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出し、
前記直線式と前記車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測すること。
【0012】
上記(4)の構成のラップタイム計測方法によれば、前記ゴール地点を特定するために最低1回だけ前記ゴール到達信号を入力することにより前記ゴールラインが自動的に特定され、このゴールラインの位置を基準としてラップタイムが計測される。従って、運転者の入力操作を減らすことができるし、ボタン操作等のタイミングのばらつきの影響を受けにくいので、精度良くラップタイムを計測できる。
【発明の効果】
【0013】
本発明の車載ラップタイム計測装置およびラップタイム計測方法によれば、ラップタイムを計測するためにサーキット場側の設備として磁気バーを備えたり車両側に磁気センサを設ける必要がない。また、車両の運転者等に要求される操作は最低1回だけ前記ゴール到達信号を入力することだけであるので、運転者等の入力操作を減らすことができる。
【0014】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0015】
【図1】実施形態の車載ラップタイム計測装置の構成例を示すブロック図である。
【図2】図1の車載ラップタイム計測装置の外観を示す正面図である。
【図3】図2の車載ラップタイム計測装置の表示内容の具体例を示す正面図である。
【図4】平面内における車両と走行路とゴールラインとの間の位置及び方向の関係を表す模式図である。
【図5】図1の車載ラップタイム計測装置の主要な動作を表すフローチャートである。
【図6】図5中のゴールライン位置演算処理の詳細を表すフローチャートである。
【図7】ゴールライン位置補正処理を表すフローチャートである。
【発明を実施するための形態】
【0016】
本発明の車載ラップタイム計測装置およびラップタイム計測方法に関する具体的な実施の形態について、各図を参照しながら以下に説明する。
【0017】
本実施形態の車載ラップタイム計測装置の構成例が図1に示されている。また、図1の車載ラップタイム計測装置の外観が図2に示されている。本実施形態の車載ラップタイム計測装置は、図1および図2に示す車載器10に組み込まれ車両に搭載される。
【0018】
車載器10は、図2に示すような回転計(タコメータ)表示部11およびサーキット表示部12を表示可能な計器ユニットとして、車両の運転席前方のインストルメントパネル上の運転者(ドライバー)から見やすい位置に設置される。また、この車載器10には運転者が操作可能な複数のボタン(スイッチ)33a、33b等を有する操作部33が設けられている。
【0019】
図1に示すように、車載器10は制御部20、時計回路31、GPS受信機32、操作部33、無線信号受信機34、液晶表示部35、LCDドライバ36、グラフィックコントローラ37、フレームメモリ38、および外部メモリ39を備えている。
【0020】
制御部20は所定のマイクロコンピュータを主体として構成されている。また、制御部20の内部に予め用意されているプログラムをマイクロコンピュータが実行することにより、図1に示された信号入力部21、車両位置取得部22、表示制御部23、車両情報管理部24、ゴールライン算出部25、ラップタイム計測部26の各機能が実現される。
【0021】
時計回路31は、周期が一定の所定のクロックパルスを計数することにより現在時刻を常時把握することができる。また、制御部20の制御によりある時点から別のある時点までの時間を計測したり計測の結果や時刻を表す情報を出力することができる。
【0022】
GPS受信機32は、複数のGPS(Global Positioning System)衛星から受信した電波の到達時間に基づいてこれを搭載した車両の現在位置を計算により把握することができる。車両の現在位置の情報は、緯度および経度を表す座標として出力される。
【0023】
操作部33は、運転者が操作可能な図2に示したボタン33a、33b等を含んでいる。ボタン33aが操作されるとゴール到達信号が発生し、ボタン33bが操作されると解除信号が発生する。後述するように、ボタン33aはラップタイムを計測する前にゴール地点に車両が到達したタイミングで運転者によって少なくとも1回押下される。
【0024】
無線信号受信機34は、車両外部からの無線信号を受信するために設けてある。すなわち、無線操作部40を所持する車両外の計測者が無線操作部40上のボタンを操作した場合に発生する無線信号(電波あるいは赤外線などの信号)を無線信号受信機34が受信すると、運転者がボタン33aを操作しなくても無線信号受信機34がゴール到達信号を発生する。なお、無線信号受信機34の搭載は省略しても良い。
【0025】
液晶表示部35は、二次元画面上に文字、図形、画像等の様々な情報を必要に応じて表示可能なディスプレイであり、例えば図2に示した回転計表示部11やサーキット表示部12を表示することができる。
【0026】
液晶表示部35に表示される情報の内容は、フレームメモリ38に書き込まれた情報によって決定される。実際に表示する内容は、制御部20の表示制御部23が決定し、制御部20とグラフィックコントローラ37との通信内容に従ってフレームメモリ38に書き込まれる。フレームメモリ38の内容は、LCDドライバ36を経由して液晶表示部35の表示に反映される。
【0027】
外部メモリ39は、不揮発性メモリであり、様々な情報を予め保持している。例えば、主要なサーキット場のそれぞれについて各コースの形状や位置などを表す情報が事前に外部メモリ39に登録され、図2に示すサーキット表示部12の内容を表示する際にこの情報が利用される。
【0028】
図1に示す信号入力部21は、操作部33のボタン操作又は無線信号受信機34が受信した無線信号によって操作部33又は無線信号受信機34から出力されるゴール到達信号や解除信号の入力を受け付ける。
【0029】
車両位置取得部22は、周期的にあるいは指定されたタイミングでGPS受信機32に指示を与え、現在の車両位置を表す最新の位置情報(緯度/経度)を取得する。
【0030】
車両情報管理部24は、車両上の各部から出力される様々な車両情報を周期的に取得し管理する。例えば、エンジンの回転数(rpm)、変速機のシフト位置、車速(km/h)、冷却水温度などの車両情報が車両情報管理部24によって管理される。
【0031】
ゴールライン算出部25は、予め定めたゴールラインの位置などを特定するための処理を行う。この処理の内容については後で詳細に説明する。ラップタイム計測部26は、ゴールライン算出部25が特定したゴールラインに基づいてラップタイムを算出する。すなわち、車両がゴールラインを横切ってから周回コースを1回周回して再びゴールラインに到達するまでの時間をラップタイムとして算出する。
【0032】
表示制御部23は、必要に応じて様々な情報を液晶表示部35の画面上に表示するための処理を行う。例えば、図3に示すサーキット表示画面51やサーキット表示画面52を液晶表示部35のサーキット表示部12に表示する。
【0033】
図3に示すサーキット表示画面51には、サーキット場の周回コースの形状とコース上の車両を表すグラフィック情報と、車両状態表示部51aが含まれている。車両状態表示部51aには、現在の車両の状態を表す情報として、エンジンの回転数(4520rpm)、変速機のシフト位置(4)、車速(165km/h)、冷却水温度(70℃)を表す文字情報が表示されている。
【0034】
また、図3に示すサーキット表示画面52には、サーキット場の周回コースの形状を表す走行路表示53と、コース上の車両表示54と、ゴールライン表示55と、ラップタイム表示部52aとが含まれている。
【0035】
なお、サーキット場の周回コースの形状や位置については、事前に登録されたデータを外部メモリ39から読み出すことにより特定できる。また、コース上の車両の位置については、車両位置取得部22がGPS受信機32から取得した車両位置の情報を用いて特定できる。ゴールライン表示55については、ゴールライン算出部25が特定したゴールラインの情報を用いて位置や方向を特定できる。
【0036】
ラップタイム表示部52aには、ラップタイム計測部26の計測により得られた周回毎のラップタイムが表示される。図3に示すラップタイム表示部52aの例では、1周目のラップタイム(3’48”)、2周目のラップタイム(3’15”)、3周目のラップタイム(3’24”)、4周目のラップタイム(3’18”)が表示されている。更に、最速である2周目のラップタイムと、最新の4周目のラップタイムについては、それぞれ表示色を切り替えて他のラップタイムと区別し易いように表示してある。
【0037】
平面内における車両と走行路とゴールラインとの間の位置及び方向の関係が図4に示されている。図4に示すように、一般的なゴールラインは走行路を横断する方向に延びる直線的な区切り位置であり、走行路の幅方向の一端から他端まで存在している。また、走行路はある程度の幅を有しているので、車両がゴールラインを横切る時に、ゴールライン上のどの位置を通過するかは決まっていない。但し、周回コースであってもゴールラインは走行路の直線状の箇所に設けられるので、車両がゴールラインに接近している状況においては、車両の進行方向がゴールラインの方向と直交する方向を向いていると考えられる。そこで、後述するように図1に示したゴールライン算出部25は、ゴール地点近傍の車両の進行方向からゴールラインの方向を特定する。
【0038】
図1に示した車載ラップタイム計測装置の主要な動作が図5に示されている。また、図5中のゴールライン位置演算処理(S16)の詳細が図6に示されている。図5、図6に示す動作について以下に説明する。
【0039】
ステップS11では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ(経度:Xo,緯度:Yo)を取得する。過去にステップS11で取得した車両位置データについては不要なので次のステップS12でクリアする。
【0040】
ステップS13では、制御部20の信号入力部21が、操作部33又は無線信号受信機34からゴール到達信号が入力されたか否かを識別する。ゴール到達信号が入力されていない時には、ステップS13からS11に戻る。従って、その場合はステップS11における車両位置データの取得を一定の周期で繰り返すことになる。ゴール到達信号が入力されると、ゴールライン設定指示ありとみなしてステップS13からS14に進む。
【0041】
すなわち、図1に示す車載器10を用いてラップタイムの計測を開始しようとする場合には、この車両が周回コースを走行中に予め定められたゴール地点に到達したことを認識したタイミングで、この車両を運転するドライバー、もしくは車外で無線操作部40を操作可能な人物が、操作部33上のボタン33aもしくは無線操作部40上のボタンを押下してゴール到達信号を出力する。このゴール到達信号が信号入力部21に入力された時にステップS14の処理に進む。
【0042】
ステップS14では、制御部20のラップタイム計測部26がラップタイムの計測を開始する。例えば、時計回路31の時間計測機能を利用する場合には、時間の計数値をクリアして経過時間の計数を開始する。あるいは、現在時刻の情報を計測開始時(ゴールライン通過時)の時刻として時計回路31から取得する。
【0043】
ステップS15では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ、すなわちゴール地点を表す位置データ(経度:Xg,緯度:Yg)を取得する。
【0044】
ステップS16では、制御部20のゴールライン算出部25が、ゴールラインを特定するために図6に示すような処理を行う。図6のステップS31では、ステップS15で取得したゴール地点の位置データ(経度:Xg,緯度:Yg)と、ゴール地点に到達する直前(ゴールより少し手前)のタイミングでステップS11で取得した車両位置データ(経度:Xo,緯度:Yo)とをゴールライン算出部25が入力する。
【0045】
ステップS32では、ゴールラインを表す直線の方向の緯度/経度座標軸に対する傾きθをゴールライン算出部25が演算する。図4に示すように、ゴール地点(Xg,Yg)の近傍においては、ゴールラインを表す直線の方向は、車両の進行方向に対して垂直な方向を向いていると考えられる。この場合の車両の進行方向については、例えばゴール手前位置(Xo,Yo)からゴール地点(Xg,Yg)まで車両が移動する間の移動方向として、経度の微小変化Δx(=Xo−Xg)および緯度の微小変化Δy(=Yg−Yo)に基づいて求めることができる。すなわち、緯度方向の軸に対するゴールラインの直線の傾きを表す角度θについては、次式で表される。
−cotθ=(Xo−Xg)/(Yg−Yo) ・・・(1)
【0046】
ステップS33では、ステップS32で求めた傾きの角度θを利用してゴールラインを表す直線式を決定する。すなわち、この直線式は次式で表される。
Y=−cotθ・X+Yg−Xg(−cotθ) ・・・(2)
【0047】
上記の処理によりゴールラインを表す直線式を決定した後で図5のステップS17に進む。ステップS17では、ゴールラインの解除指示があったかどうかを信号入力部21が識別する。すなわち、操作部33のボタン33bの操作によって発生する解除信号が信号入力部21に入力されたか否かをステップS17で識別し、解除信号が入力された場合はステップS22に、入力されていなければステップS18に進む。
【0048】
ステップS18では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ(経度:Xo,緯度:Yo)を取得する。ラップタイムの計測中にはステップS18の処理が短い周期で繰り返し実行され、最新の車両位置データが逐次入力される。
【0049】
ステップS19では、ステップS16で特定したゴールラインの位置に車両が到達したかどうかをラップタイム計測部26が識別する。すなわち、ステップS18で取得した最新の車両位置(経度:Xo,緯度:Yo)と前記第(2)式で表されるゴールラインの直線式とを比較し、車両が周回コースを1周走行した後でゴールラインを横切る位置まで車両位置が到達したか否かを識別する。到達した場合はステップS20に進み、到達してなければステップS21に進む。
【0050】
ステップS20では、ラップタイム計測部26がラップタイムの演算及びその結果を表すデータの保存処理を行う。例えば、現在の時刻を時計回路31から取得し、前回ゴールラインを横切った時に取得した時刻と現在の時刻との差分である周回コース1周の所要時間をラップタイムとして算出する。また、同時に計測値をクリアして次の周回に関するラップタイムの計測を開始する。
【0051】
ステップS21では、ステップS20で得られたラップタイムの値を、表示制御部23が液晶表示部35の画面上に表示する。例えば、既に4周分のラップタイムの計測値が取得済みである場合には、図3に示すサーキット表示画面52内のラップタイム表示部52aのように、4周分の周回毎のラップタイムを一覧として並べて表示する。また、ステップS16で得られたゴールラインの直線式を利用して、図3のようにゴールライン表示55を周回コースの走行路表示53上に表示する。
【0052】
ステップS22では、ラップタイム計測部26がラップタイムの計測を停止する。次のステップS23では、ゴールライン算出部25がステップS16で決定したゴールラインの直線式を無効化する。
【0053】
ステップS24では、表示制御部23が液晶表示部35の表示内容を変更し、図3に示すサーキット表示画面52の状態からサーキット表示画面51の状態に切り替える。サーキット表示画面51においては、ラップタイム以外の車両の状態を表す情報が車両状態表示部51aに表示される。
【0054】
ところで、図1に示した操作部33のボタン33aを運転者等が手動で操作してゴール地点を車載器10に入力する場合には、運転者がゴール地点を認識するタイミングにばらつきが生じるし、ゴール地点を認識してから実際にボタン33aを操作して前述のゴール到達信号が発生するまでの時間にもばらつきが生じる。そのため、ボタン操作によって入力されたゴール地点と実際のゴール地点との間に誤差が発生する。このような誤差を減らすための処理の具体例が図7に示されている。この処理は制御部20のマイクロコンピュータにより実行される。
【0055】
図7に示すゴールライン位置補正処理においては、信号入力部21がゴール地点を特定するためのボタン33aの入力操作を複数回受け付ける。そして、複数回の入力操作によりそれぞれ取得されるゴール地点の位置を平均化することにより、ゴールラインの位置の誤差を減らすことができる。図7に示す処理の内容について以下に説明する。
【0056】
前述のように周回コースを走行中の車両上において、ゴールラインを横切る時に運転者が操作部33のボタン33aを押下するとゴール到達信号が発生する。ゴール到達信号が発生する度に、図7のステップS41からS42に進む。
【0057】
ステップS42では、制御部20の車両位置取得部22がGPS受信機32から現在の(最新の)車両位置データ、すなわちゴール地点を表す位置データ(経度:Xg,緯度:Yg)を取得する。
【0058】
ステップS43、S45、S48では、信号入力部21に今回入力された信号が何回目のゴール到達信号かを識別する。1回目のゴール到達信号であればステップS43からS44に進み、2回目のゴール到達信号であればステップS45からS46に進み、3回目のゴール到達信号であればステップS48からS49に進む。
【0059】
ステップS44では、今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を、内部メモリ上に設けた1番目のレジスタYG1,XG1に格納し保存する。同様に、ステップS46では今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を2番目のレジスタYG2,XG2に格納し、ステップS49では今回ステップS42で取得したゴール地点の位置座標(Yg,Xg)の値を3番目のレジスタYG3,XG3に格納する。
【0060】
また、ステップS47では、レジスタYG1,YG2の値の平均値によりゴール地点の緯度Ygの値を更新し、レジスタXG1,XG2の値の平均値によりゴール地点の経度Xgの値を更新する。
【0061】
同様に、ステップS50では、レジスタYG1,YG2,YG3の値の平均値によりゴール地点の緯度Ygの値を更新し、レジスタXG1,XG2,XG3の値の平均値によりゴール地点の経度Xgの値を更新する。
【0062】
図7のステップS51では、図5のステップS16と同様の処理を行い、ゴール地点の位置座標(Yg,Xg)に基づいてゴールラインを表す直線式を特定する。従って、2回目のゴール到達信号が入力された時には、1回目に検出されたゴール地点の座標(YG1,XG1の内容)と2回目に検出されたゴール地点の座標(YG2,XG2の内容)とを平均化した座標に基づいてゴールラインの直線式が決定される。また、3回目のゴール到達信号が入力された時には、1回目に検出されたゴール地点の座標(YG1,XG1の内容)と2回目に検出されたゴール地点の座標(YG2,XG2の内容)と3回目に検出されたゴール地点の座標(YG3,XG3の内容)とを平均化した座標に基づいてゴールラインの直線式が決定される。
【0063】
つまり、周回コース上を走行する車両がゴール地点に到達する毎に、複数回に渡ってボタン33aが押下されると、ゴール地点に到達するたびに検出されるゴール地点の位置座標が平均化され、その結果がゴールラインの直線式に反映されるので、位置の誤差を減らすことができる。なお、ゴールラインの直線式が更新された時に、それ以前に測定された各ラップタイムの値を、正しいゴールラインの位置に合うように計算によって補正することも可能である。
【0064】
なお、図5に示すステップS15で検出されるゴール地点の座標(Xg,Yg)とその直前にステップS11で検出された車両位置の座標(Xo,Yo)とを用いて車両の進行方向を求める必要があるので、算出される進行方向の精度を確保するために、座標(Xg,Yg)と座標(Xo,Yo)との間に所定以上の距離が必要になる。この距離を十分に確保できるように、車両の一般的な走行速度を考慮してステップS11の実行を繰り返す周期の長さが決定される。
【0065】
なお、例えばゴールライン上の1点の座標が既知のデータとして車載器10上に予め入力されているような場合には、図5、図6の「ゴールライン位置演算」処理において、ゴール地点として既知のデータを採用し、これと車両の進行方向から求められる傾きθとを用いてゴールラインの直線式を特定すればよい。
【0066】
いずれにしても、運転者等が周回コース上のゴール地点で少なくとも回の入力操作を行うことにより、自動的に車両の進行方向が検出され、ゴールラインを特定する直線式が決定されるので、非常に簡単な操作だけで半自動的にラップタイムを計測できる。
【0067】
上述のように、本発明の車載ラップタイム計測装置およびラップタイム計測方法は、サーキット場のような周回コース上を走行する自動車に搭載する車載器などに適用することが想定される。勿論、4輪の自動車だけでなく、2輪車すなわちオートバイや自転車など、あるいはその他の移動体に搭載する車載器として利用することも想定できる。
【0068】
また、前述の車載器10はラップタイムを計測する機能を搭載しているが、この機能を省略しても良い。すなわち、ラップタイムを計測しなくても、例えば車両がゴールラインに到達した時にその時刻の情報を取得する必要があるような場合に、ゴールラインを特定する方法として本発明を利用できる。
【0069】
本発明の実施形態を説明するに当たって、サーキット場のような周回コース上のゴールラインに本発明を適用する場合について説明した。しかし、本発明は周回コースに限られるものではなく、始点及び終点の伴う任意の区間において、その始点におけるスタートラインまたはその終点におけるゴールラインを特定する方法として利用することができる。
【符号の説明】
【0070】
10 車載器
11 回転計表示部
12 サーキット表示部
20 制御部
21 信号入力部
22 車両位置取得部
23 表示制御部
24 車両情報管理部
25 ゴールライン算出部
26 ラップタイム計測部
31 時計回路
32 GPS受信機
33 操作部
34 無線信号受信機
35 液晶表示部
36 LCDドライバ
37 グラフィックコントローラ
38 フレームメモリ
39 外部メモリ
40 無線操作部
51,52 サーキット表示画面
51a 車両状態表示部
52a ラップタイム表示部
53 走行路表示
54 車両表示
55 ゴールライン表示
【特許請求の範囲】
【請求項1】
周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測する機能を含み車載器として構成される車載ラップタイム計測装置であって、
前記車両の現在位置を表す位置情報を取得する車両位置取得部と、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部と、
前記車両位置取得部が取得した車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部と、
前記直線式と前記車両位置取得部が取得した車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測するラップタイム計測部と
を備えることを特徴とする車載ラップタイム計測装置。
【請求項2】
前記信号入力部は、前記車両を運転するドライバーが操作可能な操作ボタンを含み、
前記ゴールライン算出部は、前記信号入力部の前記操作ボタンが操作された時に発生する前記ゴール到達信号が入力された時に、前記車両位置取得部が取得した位置情報の変化に基づき前記車両の移動方向を検出し、この時の車両の位置情報と検出された前記移動方向とに基づいて前記直線式を特定する
ことを特徴とする請求項1に記載の車載ラップタイム計測装置。
【請求項3】
前記ゴールライン算出部は、前記車両の周回毎に複数回に渡って前記ゴール到達信号が入力された場合には、前記ゴール到達信号が発生した各時点で得られた車両の複数の位置情報を平均化して前記直線式を修正する
ことを特徴とする請求項1に記載の車載ラップタイム計測装置。
【請求項4】
周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測するための機能を前記車両上で実現するためのラップタイム計測方法であって、
必要なタイミングで前記車両の現在位置を表す位置情報を取得し、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号が入力された時に、前記車両の位置情報の微小変化に基づいて前記車両の移動方向を検出し、
前記ゴール到達信号が入力されたタイミングで取得された前記車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出し、
前記直線式と前記車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測する
ことを特徴とするラップタイム計測方法。
【請求項1】
周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測する機能を含み車載器として構成される車載ラップタイム計測装置であって、
前記車両の現在位置を表す位置情報を取得する車両位置取得部と、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号を入力する信号入力部と、
前記車両位置取得部が取得した車両の位置情報の微小変化に基づき前記車両の移動方向を検出すると共に、前記ゴール到達信号が入力されたタイミングと、前記車両位置取得部が取得した車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出するゴールライン算出部と、
前記直線式と前記車両位置取得部が取得した車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測するラップタイム計測部と
を備えることを特徴とする車載ラップタイム計測装置。
【請求項2】
前記信号入力部は、前記車両を運転するドライバーが操作可能な操作ボタンを含み、
前記ゴールライン算出部は、前記信号入力部の前記操作ボタンが操作された時に発生する前記ゴール到達信号が入力された時に、前記車両位置取得部が取得した位置情報の変化に基づき前記車両の移動方向を検出し、この時の車両の位置情報と検出された前記移動方向とに基づいて前記直線式を特定する
ことを特徴とする請求項1に記載の車載ラップタイム計測装置。
【請求項3】
前記ゴールライン算出部は、前記車両の周回毎に複数回に渡って前記ゴール到達信号が入力された場合には、前記ゴール到達信号が発生した各時点で得られた車両の複数の位置情報を平均化して前記直線式を修正する
ことを特徴とする請求項1に記載の車載ラップタイム計測装置。
【請求項4】
周回コースを車両が周回走行する際に1回の周回にかかる所要時間をラップタイムとして計測するための機能を前記車両上で実現するためのラップタイム計測方法であって、
必要なタイミングで前記車両の現在位置を表す位置情報を取得し、
前記周回コース内の所定のゴール地点に車両が到達したことを表すゴール到達信号が入力された時に、前記車両の位置情報の微小変化に基づいて前記車両の移動方向を検出し、
前記ゴール到達信号が入力されたタイミングで取得された前記車両の位置情報と、検出された前記車両の移動方向とに基づいて、前記ゴール地点を含む直線状のゴールラインを特定する直線式を算出し、
前記直線式と前記車両の位置情報とに基づき、前記車両が前記ゴールラインを通過してから前記周回コースを1回周回して前記ゴールラインに再び到達するまでの所要時間を計測する
ことを特徴とするラップタイム計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−88136(P2012−88136A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−234237(P2010−234237)
【出願日】平成22年10月19日(2010.10.19)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月19日(2010.10.19)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]