
車載レーダ装置および車載レーダ装置の制御方法
【課題】環境の変化によらず、対象物を正確に検出する。
【解決手段】車両の周囲の対象物を検出する車載レーダ装置10において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段(演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g)と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段(広域通信部10h)と、取得手段によって取得された周辺情報に基づいて、検出手段の検出精度の低下を抑制するように検出手段を制御する制御手段(演算制御部10a)と、を有する。
【解決手段】車両の周囲の対象物を検出する車載レーダ装置10において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段(演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g)と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段(広域通信部10h)と、取得手段によって取得された周辺情報に基づいて、検出手段の検出精度の低下を抑制するように検出手段を制御する制御手段(演算制御部10a)と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載レーダ装置および車載レーダ装置の制御方法に関するものである。
【背景技術】
【0002】
近年、自車両周辺に存在する物体をレーダによって検出し、検出した情報に基づいて他車両との衝突を未然に防いだり、衝突時の被害を軽減したりするための車載レーダ装置が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平09−288177号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載されている技術では、レーダ表面に水膜が形成されたり、着氷が生じたりすると電波の通過損失が増加するため、対象物を正確に検出できなくなるという問題点がある。また、渋滞時には、近接する車両から送信された電波同士が干渉を生じるため、同様に、対象物を正確に検出できなくなるという問題点がある。
【0005】
そこで、本発明の課題は、環境の変化によらず、対象物を正確に検出することが可能な車載レーダ装置および車載レーダ装置の制御方法を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、車両の周囲の対象物を検出する車載レーダ装置において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段と、前記取得手段によって取得された前記周辺情報に基づいて、前記検出手段の検出精度の低下を抑制するように前記検出手段を制御する制御手段と、を有することを特徴とする。
このような構成によれば、環境の変化によらず、対象物を正確に検出することが可能となる。
【0007】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の渋滞情報を取得し、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定される場合には、周囲に送信する信号の平均電力を減少させ、他車両が送信する信号との干渉を抑えることにより、前記検出手段の検出精度の低下を抑制することを特徴とする。
このような構成によれば、他の車両から送信される信号との干渉を低減することにより、検出精度の低下を抑制できる。
【0008】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の天候情報を取得し、前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定される場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、検出精度が低下する天候状況においては、積分時間を増加させ、平均化処理により検出精度の低下を抑制できる。
【0009】
また、他の発明は、上記発明に加えて、前記制御手段は、前記天候情報によって車両周辺で降水が生じていると判定した場合は、検出精度が低下する天候状況が発生していると判定し、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、降水によって通過損失が発生している場合には、積分時間を増加さ、平均化処理により検出精度の低下を抑制できる。
【0010】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の渋滞情報または天候情報を取得し、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合、または、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、前記検出手段によって検出される情報の信頼性が低いことを示す情報を出力することを特徴とする。
このような構成によれば、車載レーダ装置からの情報を利用する上位装置は、信頼性が低いことを示す情報を参照することにより、検出精度が低いことを予め知った上で種々の判定を行うことができる。
【0011】
また、他の発明は、上記発明に加えて、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、積分時間を増加させ、平均化処理により他の車両から送信される信号をノイズとして除外することにより、検出精度の低下を抑制できる。
【0012】
また、他の発明は、上記発明に加えて、前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、周囲に送信する信号の平均電力を増加させることにより、前記検出手段の検出精度の低下を抑制することを特徴とする。
このような構成によれば、通過損失が存在する場合であっても、平均電力を増加させることにより、検出精度の低下を抑制できる。
【0013】
また、本発明は、車両の周囲の対象物を検出する車載レーダ装置の制御方法において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出ステップと、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得ステップと、前記取得ステップにおいて取得された前記周辺情報に基づいて、前記検出ステップの検出精度の低下を抑制するように前記検出ステップを制御する制御ステップと、を有することを特徴とする。
このような方法によれば、環境の変化によらず、対象物を正確に検出することが可能となる。
【発明の効果】
【0014】
本発明によれば、環境の変化によらず、対象物を正確に検出することが可能な車載レーダ装置および車載レーダ装置の制御方法を提供することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態の構成例を示す図である。
【図2】図1に示す実施形態の動作を説明するためのフローチャートである。
【図3】図1に示す実施形態から送信される電波の状態を説明するための図である。
【図4】図1に示す実施形態の動作を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
次に、本発明の実施形態について説明する。
【0017】
(A)実施形態の構成の説明
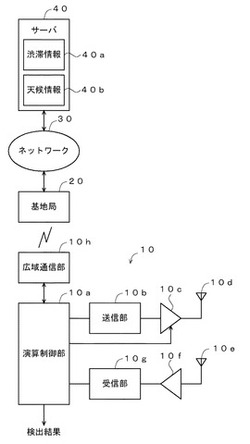
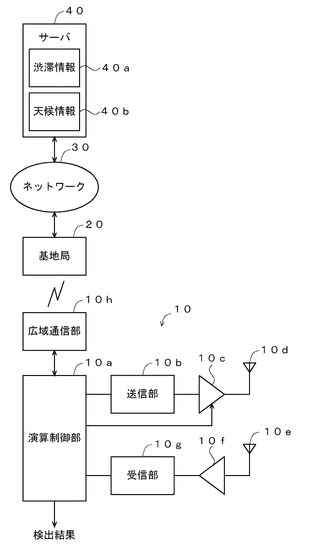
図1は、本発明の実施形態の構成例を示す図である。この図に示すように、本実施形態に係る車載レーダ装置10は、演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g、および、広域通信部10hを主要な構成要素としている。
【0018】
ここで、演算制御部10aは、送信部10bを制御して送信信号を出力させるとともに、受信部10gから出力される受信信号を入力し、この受信信号に対して演算処理を施すことで、対象物の位置、速度等を検出する。また、演算制御部10aは、広域通信部10hを介してサーバ40にアクセスし、渋滞情報および天候情報を取得し、これらの情報に基づいて、対象物の検出精度が低下しないように制御を行う。
【0019】
送信部10bは、演算制御部10aの制御に応じて、例えば、数GHz帯域を利用した超広帯域無線であるUWB(Ultra Wide Band)信号を生成して出力する。増幅部10cは、送信部10bから出力されるUWB信号を所定のゲインで増幅して出力する。送信アンテナ10dは、増幅部10cから供給されるUWB信号を電波として対象物が存在する空間(車両周辺の空間)に対して送出する。
【0020】
受信アンテナ10eは、送信アンテナ10dから送出され、対象物によって反射された反射信号を捕捉し、電気信号に変換して出力する。増幅部10fは、受信アンテナ10eから供給される電気信号を所定のゲインで増幅して出力する。受信部10gは、増幅部10fから供給される受信信号をデジタル信号に変換し、演算制御部10aに供給する。
【0021】
広域通信部10hは、基地局20との間で、例えば、電波によって情報を授受する。ここで、基地局20は、所定の面積を有する通信エリア毎に配置され、広域通信部10hとの間で電波を介して情報を授受するとともに、ネットワーク30を介してサーバ40との間で情報を授受する。
【0022】
ネットワーク30は、例えば、サーバ40と基地局20との間で、情報をパケット化して送受信する。サーバ40は、ネットワーク30に接続され、基地局20との間で情報を授受する。なお、サーバ40は、例えば、渋滞情報40aおよび天候情報40b等の周辺情報を有しており、基地局20を介して車載レーダ装置10からアクセスがなされた場合には、車載レーダ装置10が搭載された車両が走行している周辺の渋滞情報40aおよび天候情報40bを取得して送信する。
【0023】
(B)実施形態の動作原理の説明
つぎに、本実施形態の動作原理について説明する。本実施形態では、車載レーダ装置10は、サーバ40から渋滞情報と天候情報を取得し、これらの情報に基づいて、車載レーダ装置10の検出精度が低下しないように制御を行う。具体的には、渋滞が発生している場合には、自車両の周辺に多数の他車両が存在し、それぞれの車両がレーダ信号(例えば、UWB信号)を送信することから、これらの干渉が生じて検出精度が低下してしまう。そこで、本実施形態では、自車両の周辺で渋滞が発生している場合にはレーダ信号の平均電力(例えば、パルスの送信頻度)を低減することにより、信号の干渉の発生を抑制し、検出精度が低下することを防止する。また、渋滞が発生している場合には、受信信号に対する積分時間を増加させることで、受信信号を平均化してノイズ成分を抑制することで検出精度が低下することを抑制する。
【0024】
また、自車両の周辺で検出精度が低下する天候状況が発生している場合には、相対的にノイズが増加することで検出精度が低下してしまうことから、そのような場合には、受信信号に対する積分時間を増加させ、信号を平均化してノイズ成分を抑制することで検出精度が低下することを抑制する。なお、検出精度が低下する天候状況とは、例えば、降水(例えば、降雨、降雪、降雹等)が生じている場合であり、そのような場合にはレーダ表面に水膜が形成されたり、着氷が生じたりすることからレーダ信号の通過損失が増加するためS/N比が劣化し、検出精度が低下する。また、降水が生じている場合には、空間中の水分量が増加することから、レーダ信号の通過損失が増加するため、同様にS/N比が劣化し、検出精度が低下する。このため、本実施形態では、天候情報から自車両の周辺で降水が生じている場合には、受信信号に対する積分時間を増加させることで、信号を平均化してノイズ成分を抑制し、検出精度の低下を抑制する。また、本実施形態では、天候情報から自車両の周辺で降水が生じている場合には、送信するレーダ信号の電力を増加させることにより、降雨減衰による信号の減衰を補うことで、検出精度が低下することを防止する。
【0025】
また、本実施形態では、渋滞が深刻であるかまたは降水が非常に多く、前述の処理によっても検出精度の低下を十分に抑制できない場合には、検出精度が低下していることを示す情報を、検出情報に合わせて出力する。これにより、深刻な渋滞や大量の降雨によって検出精度の低下が避けられない場合には、このような情報を参照することで、例えば、誤検出の発生や、誤判断の発生を防止することができる。
【0026】
以上に説明したように、本実施形態では、自車両の周辺の状況を示す周辺情報である渋滞情報および天候情報を参照し、受信信号の積分時間を増加したり、送信信号の電力を増減したりすることにより、検出精度が低下することを防止することができる。また、渋滞が深刻であるかまたは降水が非常に多い場合には、検出精度が低下していることを示す情報を出力することで誤検出または誤判断を防ぐことができる。
【0027】
(C)実施形態の詳細な動作の説明
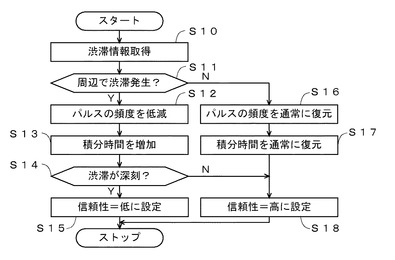
つぎに、本実施形態の動作について説明する。図2は、渋滞時における動作を説明するためのフローチャートである。このフローチャートの処理が開始されると、以下のステップが実行される。
【0028】
ステップS10では、演算制御部10aは、広域通信部10hに対して渋滞情報を取得するように要求する。この結果、広域通信部10hは、例えば、図示しないGPS(Global Positioning System)制御部から自車両の現在位置に関する情報を取得し、自車両の周辺の渋滞情報をサーバ40に送信するように要求する。サーバ40は、車載レーダ装置10からの要求に応じて自車両の周辺の渋滞情報40aを取得し、ネットワーク30および基地局20を介して広域通信部10hに送信する。この結果、演算制御部10aは、広域通信部10hから自車両の周辺の渋滞情報40aを取得する。なお、ここで、渋滞情報40aとは、自車両の周辺における渋滞の状況を示す情報である。なお、渋滞とは、例えば、自車両が走行している車線の走行速度が低下していることであると定義したり、あるいは、走行速度は低下していないものの、自車両の周辺に一定以上の台数の車両が走行している状態と定義したりすることができる。なお、このような渋滞情報40aについては、例えば、VICS(Vehicle Information and Communication System)情報からサーバ40が取得したり、あるいは、各車両に搭載されている広域通信部10hから送信される位置情報に基づいて位置毎の車両の密度を求めてサーバ40が渋滞情報を生成したりするようにしてもよい。
【0029】
ステップS11では、演算制御部10aは、ステップS10で取得した渋滞情報40aを参照し、自車両の周辺で渋滞が発生しているか否かを判定し、渋滞が発生していると判定した場合(ステップS11:Yes)にはステップS12に進み、それ以外の場合(ステップS11:No)にはステップS16に進む。なお、渋滞が発生しているか否かの具体的な判定方法としては、例えば、自車両を中心とする半径10mのエリア内に車両が10台以上存在する場合には渋滞が発生していると判定することができる。もちろん、これ以外のエリアや台数を判定基準としてもよい。また、走行中の道路の種類等に応じて、判定の基準を変更するようにしてもよい。例えば、一般道路と高速道路とでは、渋滞していない場合における車間距離が異なることから、一般道路の場合には半径10mのエリア内に車両が10台以上存在するか否かで判定し、高速道路の場合には半径10mのエリア内に車両が5台以上存在するか否かで判定するようにしてもよい。もちろん、これ以外の基準でもよい。
【0030】
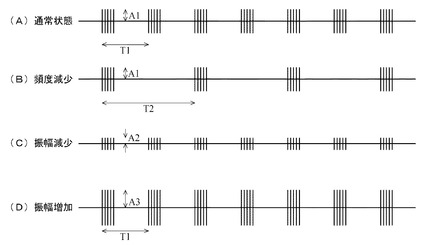
ステップS12では、演算制御部10aは、送信アンテナ10dから送信するUWB信号のパルスの頻度を低減させる。図3は送信アンテナ10dから送信するUWB信号のパルスを示す図である。ここで、図3(A)は、通常状態において送信されるパルスを示している。この図に示すように、通常状態(渋滞が発生していない場合)においては、振幅A1のパルスが周期T1で送信される。一方、ステップS12の処理により、頻度が低減されると、例えば、図3(B)に示すように、振幅A1のパルスが周期T2(>T1)で送信される。なお、図3(B)の例では、通常状態の1/2の頻度で送信されているが、もちろん、これ以外の頻度に低減してもよい。
【0031】
ステップS13では、演算制御部10aは、受信信号に対する積分時間を増加させる。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を増加させる。これにより、積分されるパルスの数が増加することから、渋滞によって他の車両からの電波が増加した場合であっても、自車両の受信信号との間の相関が低い他の車両からの電波を平均化によってノイズ成分として低減し、その影響を抑制することができる。
【0032】
ステップS14では、演算制御部10aは、渋滞が深刻か否かを判定し、深刻であると判定した場合(ステップS14:Yes)にはステップS15に進み、それ以外の場合(ステップS14:No)にはステップS18に進む。なお、ステップS14では、ステップS11よりも渋滞がより深刻であるか否かを判定の基準とする。具体的には、ステップS10で取得した渋滞情報を参照し、自車両を中心とする半径10mのエリア内に車両が20台以上存在する場合には渋滞が深刻であると判定してステップS15に進み、それ以外の場合にはステップS18に進む。もちろん、これ以外のエリアであったり、台数であったりしてもよい。
【0033】
ステップS15では、演算制御部10aは、渋滞が深刻であることから、検出の信頼性が低いことを示す情報を出力する。すなわち、渋滞が深刻である場合には、ステップS12およびステップS13の処理が実行されても、検出精度が十分に確保できない可能性があることから、そのような場合には、演算制御部10aは、検出結果を示す情報とともに、検出結果の信頼性が低いことを示す情報を出力する。このような情報を受信した上位の装置では、検出結果の信頼性が低いことを考慮し、例えば、複数回の検出結果に基づいて判断を行ったり、あるいは、他の情報源(例えば、対象物を監視するカメラ)からの情報を合わせて参酌したりして、制御を行うようにすることで、信頼性の低さを補うことができる。
【0034】
ステップS16では、演算制御部10aは、自車両の周辺で渋滞が発生していないことから、送信アンテナ10dから送信するUWB信号のパルスの頻度を通常に戻す。具体的には、図3(B)に示す状態から、図3(A)に示す状態に復元する。
【0035】
ステップS17では、演算制御部10aは、受信信号に対する積分時間を通常に戻す。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を通常の時間に復元する。
【0036】
ステップS18では、演算制御部10aは、演算制御部10aは、渋滞が生じていないか、あるいは、生じていてもステップS13およびステップS14の処理によって検出精度が確保できることから、検出結果の信頼性が高いことを示す情報を出力する。
【0037】
以上の処理によれば、車両の周辺で渋滞が発生している場合には、UWB信号のパルスの頻度を低減することで、他の車両との間の干渉を低減するとともに、受信信号の積分時間を増加することによって、他の車両から送信されるUWB信号の影響を低減することができる。これによって、渋滞時であっても、車載レーダ装置10の検出精度が低下することを防止できる。
【0038】
また、以上の処理では、渋滞が深刻である場合(所定以上の台数の車両が自車両を中心とするエリア内に存在する場合)には、ステップS12およびステップS13の処理によっても検出精度の低下を補うことができないため、信頼性が低いことを示す情報を検出結果とともに出力する。これにより、上位の装置は、検出精度の高低を知るとともに、検出精度の高低に応じた処理を実行することができる。
【0039】
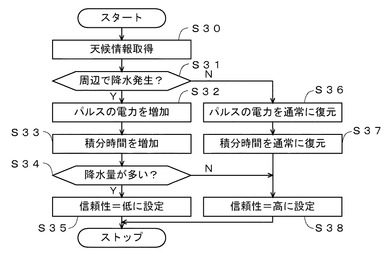
つぎに、図4を参照して、天候情報に基づく動作について説明する。このフローチャートの処理が開始されると、以下のステップが実行される。
【0040】
ステップS30では、演算制御部10aは、広域通信部10hに対して天候情報を取得するように要求する。この結果、広域通信部10hは、例えば、図示しないGPS制御部から自車両の現在位置に関する情報を取得し、自車両の周辺の天候情報40bをサーバ40に送信するように要求する。サーバ40は、車載レーダ装置10からの要求に応じて自車両の周辺の天候情報40bを取得し、ネットワーク30および基地局20を介して広域通信部10hに送信する。この結果、演算制御部10aは、広域通信部10hから自車両の周辺の天候情報40bを取得する。なお、ここで、天候情報とは、自車両の周辺の天候(晴、曇、雨、雪、雹等)、降水量、気温、および、これらの時間的な変化を示す情報である。もちろん、これらの一部だけの情報であったり、または、これら以外の情報を含んでいたりしてもよい。なお、降水量には、雨だけでなく、雪、雹等の降下量も含むものとする。
【0041】
ステップS31では、演算制御部10aは、ステップS30で取得した天候情報40bを参照して自車両の周辺で降水が発生しているか否かを判定し、発生していると判定した場合(ステップS31:Yes)にはステップS32に進み、それ以外の場合(ステップS31:No)にはステップS36に進む。例えば、自車両が位置している場所に、所定量(例えば、10mm/h)以上の降水があると判定した場合にはステップS32に進み、それ以外の場合にはステップS36に進む。なお、前述した10mm/hは、一例であって、これ以外の値であってもよいことはいうまでもない。
【0042】
ステップS32では、演算制御部10aは、送信アンテナ10dから送信するUWB信号のパルスの電力を増加させる。具体的には、図3(D)に示すように、振幅をA1からA3(>A1)に増加させる。なお、図3(D)の例では、通常状態の2倍の振幅とされているが、もちろん、これ以外の振幅(例えば、1.5倍等)であってもよい。
【0043】
ステップS33では、演算制御部10aは、受信信号に対する積分時間を増加させる。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を増加させる。これにより、積分されるパルスの数が増加することから、平均化によりバックグラウンドのノイズ成分が低減されるため、着水、着氷、または、降雨減衰によって受信信号の強度が低下し、S/N比が低下した場合であっても、その影響を抑制することができる。
【0044】
ステップS34では、演算制御部10aは、降水量が所定量よりも多いか否かを判定し、所定量よりも多いと判定した場合(ステップS34:Yes)にはステップS35に進み、それ以外の場合(ステップS34:No)にはステップS38に進む。なお、ステップS34では、ステップS31よりも降水量がより多いか否かを判定の基準とする。具体的には、ステップS30で取得した天候情報40bを参照し、降水量が20mm/hを超える場合には、降水量が所定量よりも多いと判定してステップS35に進み、それ以外の場合にはステップS38に進む。もちろん、前述した以外の数値であってもよい。
【0045】
ステップS35では、演算制御部10aは、降水量が多いことから、検出の信頼性が低いことを示す情報を出力する。すなわち、降水量が多い場合には、ステップS32およびステップS33の処理が実行されても、検出精度が十分に確保できない可能性があることから、演算制御部10aは、検出結果を示す情報とともに、検出結果の信頼性が低いことを示す情報を出力する。このような情報を受信した上位の装置では、前述の場合と同様に、検出結果の信頼性が低いことを参酌し、例えば、複数回の検出結果に基づいて判断を行ったり、あるいは、他の情報源である対象物を監視するカメラからの情報を合わせて参酌したりして、制御を行うようにすることで、信頼性の低さを補うことができる。
【0046】
ステップS36では、演算制御部10aは、自車両の周辺で降水が発生していないことから、送信アンテナ10dから送信するUWB信号のパルスの電力を通常に戻す。具体的には、図3(D)に示す状態から、図3(A)に示す状態に復元する。
【0047】
ステップS37では、演算制御部10aは、受信信号に対する積分時間を通常に戻す。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を通常の時間に復元する。
【0048】
ステップS38では、演算制御部10aは、演算制御部10aは、降水が生じていないか、あるいは、生じていてもステップS33およびステップS34の処理によって検出精度が確保できることから、検出結果の信頼性が高いことを示す情報を出力する。
【0049】
以上の処理によれば、自車両の周辺で降水が発生している場合には、UWB信号のパルスの電力を増加することで、着水、着氷、または、降雨減衰による検出精度の低下を抑制することができる。これによって、降水時であっても、車載レーダ装置10の検出精度が低下することを防止できる。
【0050】
また、以上の処理では、降水量が多い場合には、ステップS32およびステップS33の処理によっても検出精度の低下を補うことができないため、信頼性が低いことを示す情報を検出結果とともに出力するようにした。これにより、上位の装置は、検出精度の高低を知るとともに、検出精度の高低に応じた処理を実行することができる。
【0051】
(D)変形実施形態
なお、上記の実施形態は、一例であって、これ以外にも各種の変形実施態様が存在する。例えば、図2に示すフローチャートでは、渋滞が発生している場合にはステップS12において、図3(B)に示すようにパルスの頻度を低減するようにしたが、例えば、図3(C)に示すように、パルスの振幅をA2(<A1)に減少させるようにしてもよい。あるいは、パルスの頻度の低減と、パルスの振幅の減少とを合わせて実行するようにしてもよい。
【0052】
また、図2に示すフローチャートでは、渋滞が発生した場合には、パルスの頻度の低減と積分時間の増加を同時に実行するようにしたが、いずれか一方のみを実行するようにしてもよい。あるいは、渋滞の状態に応じて、例えば、渋滞が深刻でない場合(自車両を中心とする一定範囲内の車両数が所定の台数未満の場合)には積分時間の増加のみを実行し、渋滞が深刻になった場合(自車両を中心とする一定範囲内の車両数が所定の台数以上の場合)にはパルスの頻度を低下させるようにしてもよい。あるいは、この逆でもよい。また、パルスの頻度の低減およびパルスの振幅の減少については、渋滞の度合いに応じて変更するようにしてもよい。
【0053】
また、信頼性を示す情報については、高および低の2種類としたが、例えば、渋滞の状況に応じて3種類以上としてもよい。例えば、3種類の場合には高、中、低としてもよい。
【0054】
また、図4に示すフローチャートでは、降水が発生している場合にはステップS32において、図3(D)に示すようにパルスの振幅を増加するようにしたが、例えば、パルスの頻度を増加させたり、各パルスの持続時間を増加させたりするようにしてもよい。
【0055】
また、図2に示すフローチャートでは、降水が発生した場合には、パルスの電力の増加と積分時間の増加を同時に実行するようにしたが、いずれか一方のみを実行するようにしてもよい。あるいは、降水の状態に応じて、例えば、降水量が少ない場合(降水量が所定量未満である場合)には積分時間の増加のみを実行し、降水量が多くなった場合(降水量が所定量以上である場合)にはパルスの電力を増加するようにしてもよい。あるいは、この逆でもよい。また、パルスの電力の増加量については、渋滞の度合いに応じて変更するようにしてもよい。
【0056】
また、以上の実施形態では、渋滞と降雨が同時に発生した場合については言及していないが、これらが同時に発生した場合には、例えば、積分時間のみを増加させ、パルスの電力の増加およびパルスの頻度の低減については実行しないようにしてもよい。あるいは、渋滞と降水のいずれが深刻かを判定し、例えば、降水が与える影響の方が深刻な場合にはパルスの電力を増加し、渋滞が与える影響の方が深刻な場合にはパルスの頻度を低減するようにしてもよい。
【0057】
また、以上の実施形態では、パルス信号としてのUWB信号を使用する場合を例に挙げて説明したが、これ以外の信号を用いるようにしてもよい。例えば、連続波信号を用いることも可能であり、その場合には、図2のステップS12の処理では、連続波信号を、間欠的に送信するようにすればよい。また、図4のステップS32の処理では、図3(D)と同様に連続波の振幅を増加するようにすればよい。
【0058】
また、以上の実施形態では、降水による通過減衰を主に例に挙げて説明したが、例えば、(1)降雨によって車載レーダ装置10が内蔵されている車両のバンパの表面に水膜が形成された場合や、(2)降雪によってバンパの表面に雪が付着した場合や、(3)降水後の温度低下によってバンパの表面に着氷が生じた場合にも同様の感度低下が生じる。そこで、これらを天候情報に基づいて検出するようにしてもよい。具体的には、(1)については、車両が走行開始する所定の時間以内(例えば、1時間以内)に降雨があった場合には水膜が形成されていると想定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。また、(2)の場合には車両が走行開始する所定の時間以内(例えば、6時間以内)に降雪があった場合には雪が付着していると想定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。また、(3)の場合は、気温が氷点下であって、所定の時間内に降雨または降雪があった場合には着氷が生じていると判定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。
【符号の説明】
【0059】
10 車載レーダ装置
10a 演算制御部(検出手段の一部、制御手段)
10b 送信部(検出手段の一部)
10c 増幅部(検出手段の一部)
10d 送信アンテナ(検出手段の一部)
10e 受信アンテナ(検出手段の一部)
10f 増幅部(検出手段の一部)
10g 受信部(検出手段の一部)
10h 広域通信部(取得手段)
20 基地局(通信網の一部)
30 ネットワーク(通信網の一部)
40 サーバ
40a 渋滞情報(周辺情報)
40b 天候情報(周辺情報)
【技術分野】
【0001】
本発明は、車載レーダ装置および車載レーダ装置の制御方法に関するものである。
【背景技術】
【0002】
近年、自車両周辺に存在する物体をレーダによって検出し、検出した情報に基づいて他車両との衝突を未然に防いだり、衝突時の被害を軽減したりするための車載レーダ装置が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平09−288177号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載されている技術では、レーダ表面に水膜が形成されたり、着氷が生じたりすると電波の通過損失が増加するため、対象物を正確に検出できなくなるという問題点がある。また、渋滞時には、近接する車両から送信された電波同士が干渉を生じるため、同様に、対象物を正確に検出できなくなるという問題点がある。
【0005】
そこで、本発明の課題は、環境の変化によらず、対象物を正確に検出することが可能な車載レーダ装置および車載レーダ装置の制御方法を提供することである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、車両の周囲の対象物を検出する車載レーダ装置において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段と、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段と、前記取得手段によって取得された前記周辺情報に基づいて、前記検出手段の検出精度の低下を抑制するように前記検出手段を制御する制御手段と、を有することを特徴とする。
このような構成によれば、環境の変化によらず、対象物を正確に検出することが可能となる。
【0007】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の渋滞情報を取得し、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定される場合には、周囲に送信する信号の平均電力を減少させ、他車両が送信する信号との干渉を抑えることにより、前記検出手段の検出精度の低下を抑制することを特徴とする。
このような構成によれば、他の車両から送信される信号との干渉を低減することにより、検出精度の低下を抑制できる。
【0008】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の天候情報を取得し、前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定される場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、検出精度が低下する天候状況においては、積分時間を増加させ、平均化処理により検出精度の低下を抑制できる。
【0009】
また、他の発明は、上記発明に加えて、前記制御手段は、前記天候情報によって車両周辺で降水が生じていると判定した場合は、検出精度が低下する天候状況が発生していると判定し、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、降水によって通過損失が発生している場合には、積分時間を増加さ、平均化処理により検出精度の低下を抑制できる。
【0010】
また、他の発明は、上記発明に加えて、前記取得手段は、前記周辺情報として車両周辺の渋滞情報または天候情報を取得し、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合、または、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、前記検出手段によって検出される情報の信頼性が低いことを示す情報を出力することを特徴とする。
このような構成によれば、車載レーダ装置からの情報を利用する上位装置は、信頼性が低いことを示す情報を参照することにより、検出精度が低いことを予め知った上で種々の判定を行うことができる。
【0011】
また、他の発明は、上記発明に加えて、前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする。
このような構成によれば、積分時間を増加させ、平均化処理により他の車両から送信される信号をノイズとして除外することにより、検出精度の低下を抑制できる。
【0012】
また、他の発明は、上記発明に加えて、前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、周囲に送信する信号の平均電力を増加させることにより、前記検出手段の検出精度の低下を抑制することを特徴とする。
このような構成によれば、通過損失が存在する場合であっても、平均電力を増加させることにより、検出精度の低下を抑制できる。
【0013】
また、本発明は、車両の周囲の対象物を検出する車載レーダ装置の制御方法において、車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出ステップと、通信網を介して車両の周辺の状況を示す周辺情報を取得する取得ステップと、前記取得ステップにおいて取得された前記周辺情報に基づいて、前記検出ステップの検出精度の低下を抑制するように前記検出ステップを制御する制御ステップと、を有することを特徴とする。
このような方法によれば、環境の変化によらず、対象物を正確に検出することが可能となる。
【発明の効果】
【0014】
本発明によれば、環境の変化によらず、対象物を正確に検出することが可能な車載レーダ装置および車載レーダ装置の制御方法を提供することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の実施形態の構成例を示す図である。
【図2】図1に示す実施形態の動作を説明するためのフローチャートである。
【図3】図1に示す実施形態から送信される電波の状態を説明するための図である。
【図4】図1に示す実施形態の動作を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
次に、本発明の実施形態について説明する。
【0017】
(A)実施形態の構成の説明
図1は、本発明の実施形態の構成例を示す図である。この図に示すように、本実施形態に係る車載レーダ装置10は、演算制御部10a、送信部10b、増幅部10c、送信アンテナ10d、受信アンテナ10e、増幅部10f、受信部10g、および、広域通信部10hを主要な構成要素としている。
【0018】
ここで、演算制御部10aは、送信部10bを制御して送信信号を出力させるとともに、受信部10gから出力される受信信号を入力し、この受信信号に対して演算処理を施すことで、対象物の位置、速度等を検出する。また、演算制御部10aは、広域通信部10hを介してサーバ40にアクセスし、渋滞情報および天候情報を取得し、これらの情報に基づいて、対象物の検出精度が低下しないように制御を行う。
【0019】
送信部10bは、演算制御部10aの制御に応じて、例えば、数GHz帯域を利用した超広帯域無線であるUWB(Ultra Wide Band)信号を生成して出力する。増幅部10cは、送信部10bから出力されるUWB信号を所定のゲインで増幅して出力する。送信アンテナ10dは、増幅部10cから供給されるUWB信号を電波として対象物が存在する空間(車両周辺の空間)に対して送出する。
【0020】
受信アンテナ10eは、送信アンテナ10dから送出され、対象物によって反射された反射信号を捕捉し、電気信号に変換して出力する。増幅部10fは、受信アンテナ10eから供給される電気信号を所定のゲインで増幅して出力する。受信部10gは、増幅部10fから供給される受信信号をデジタル信号に変換し、演算制御部10aに供給する。
【0021】
広域通信部10hは、基地局20との間で、例えば、電波によって情報を授受する。ここで、基地局20は、所定の面積を有する通信エリア毎に配置され、広域通信部10hとの間で電波を介して情報を授受するとともに、ネットワーク30を介してサーバ40との間で情報を授受する。
【0022】
ネットワーク30は、例えば、サーバ40と基地局20との間で、情報をパケット化して送受信する。サーバ40は、ネットワーク30に接続され、基地局20との間で情報を授受する。なお、サーバ40は、例えば、渋滞情報40aおよび天候情報40b等の周辺情報を有しており、基地局20を介して車載レーダ装置10からアクセスがなされた場合には、車載レーダ装置10が搭載された車両が走行している周辺の渋滞情報40aおよび天候情報40bを取得して送信する。
【0023】
(B)実施形態の動作原理の説明
つぎに、本実施形態の動作原理について説明する。本実施形態では、車載レーダ装置10は、サーバ40から渋滞情報と天候情報を取得し、これらの情報に基づいて、車載レーダ装置10の検出精度が低下しないように制御を行う。具体的には、渋滞が発生している場合には、自車両の周辺に多数の他車両が存在し、それぞれの車両がレーダ信号(例えば、UWB信号)を送信することから、これらの干渉が生じて検出精度が低下してしまう。そこで、本実施形態では、自車両の周辺で渋滞が発生している場合にはレーダ信号の平均電力(例えば、パルスの送信頻度)を低減することにより、信号の干渉の発生を抑制し、検出精度が低下することを防止する。また、渋滞が発生している場合には、受信信号に対する積分時間を増加させることで、受信信号を平均化してノイズ成分を抑制することで検出精度が低下することを抑制する。
【0024】
また、自車両の周辺で検出精度が低下する天候状況が発生している場合には、相対的にノイズが増加することで検出精度が低下してしまうことから、そのような場合には、受信信号に対する積分時間を増加させ、信号を平均化してノイズ成分を抑制することで検出精度が低下することを抑制する。なお、検出精度が低下する天候状況とは、例えば、降水(例えば、降雨、降雪、降雹等)が生じている場合であり、そのような場合にはレーダ表面に水膜が形成されたり、着氷が生じたりすることからレーダ信号の通過損失が増加するためS/N比が劣化し、検出精度が低下する。また、降水が生じている場合には、空間中の水分量が増加することから、レーダ信号の通過損失が増加するため、同様にS/N比が劣化し、検出精度が低下する。このため、本実施形態では、天候情報から自車両の周辺で降水が生じている場合には、受信信号に対する積分時間を増加させることで、信号を平均化してノイズ成分を抑制し、検出精度の低下を抑制する。また、本実施形態では、天候情報から自車両の周辺で降水が生じている場合には、送信するレーダ信号の電力を増加させることにより、降雨減衰による信号の減衰を補うことで、検出精度が低下することを防止する。
【0025】
また、本実施形態では、渋滞が深刻であるかまたは降水が非常に多く、前述の処理によっても検出精度の低下を十分に抑制できない場合には、検出精度が低下していることを示す情報を、検出情報に合わせて出力する。これにより、深刻な渋滞や大量の降雨によって検出精度の低下が避けられない場合には、このような情報を参照することで、例えば、誤検出の発生や、誤判断の発生を防止することができる。
【0026】
以上に説明したように、本実施形態では、自車両の周辺の状況を示す周辺情報である渋滞情報および天候情報を参照し、受信信号の積分時間を増加したり、送信信号の電力を増減したりすることにより、検出精度が低下することを防止することができる。また、渋滞が深刻であるかまたは降水が非常に多い場合には、検出精度が低下していることを示す情報を出力することで誤検出または誤判断を防ぐことができる。
【0027】
(C)実施形態の詳細な動作の説明
つぎに、本実施形態の動作について説明する。図2は、渋滞時における動作を説明するためのフローチャートである。このフローチャートの処理が開始されると、以下のステップが実行される。
【0028】
ステップS10では、演算制御部10aは、広域通信部10hに対して渋滞情報を取得するように要求する。この結果、広域通信部10hは、例えば、図示しないGPS(Global Positioning System)制御部から自車両の現在位置に関する情報を取得し、自車両の周辺の渋滞情報をサーバ40に送信するように要求する。サーバ40は、車載レーダ装置10からの要求に応じて自車両の周辺の渋滞情報40aを取得し、ネットワーク30および基地局20を介して広域通信部10hに送信する。この結果、演算制御部10aは、広域通信部10hから自車両の周辺の渋滞情報40aを取得する。なお、ここで、渋滞情報40aとは、自車両の周辺における渋滞の状況を示す情報である。なお、渋滞とは、例えば、自車両が走行している車線の走行速度が低下していることであると定義したり、あるいは、走行速度は低下していないものの、自車両の周辺に一定以上の台数の車両が走行している状態と定義したりすることができる。なお、このような渋滞情報40aについては、例えば、VICS(Vehicle Information and Communication System)情報からサーバ40が取得したり、あるいは、各車両に搭載されている広域通信部10hから送信される位置情報に基づいて位置毎の車両の密度を求めてサーバ40が渋滞情報を生成したりするようにしてもよい。
【0029】
ステップS11では、演算制御部10aは、ステップS10で取得した渋滞情報40aを参照し、自車両の周辺で渋滞が発生しているか否かを判定し、渋滞が発生していると判定した場合(ステップS11:Yes)にはステップS12に進み、それ以外の場合(ステップS11:No)にはステップS16に進む。なお、渋滞が発生しているか否かの具体的な判定方法としては、例えば、自車両を中心とする半径10mのエリア内に車両が10台以上存在する場合には渋滞が発生していると判定することができる。もちろん、これ以外のエリアや台数を判定基準としてもよい。また、走行中の道路の種類等に応じて、判定の基準を変更するようにしてもよい。例えば、一般道路と高速道路とでは、渋滞していない場合における車間距離が異なることから、一般道路の場合には半径10mのエリア内に車両が10台以上存在するか否かで判定し、高速道路の場合には半径10mのエリア内に車両が5台以上存在するか否かで判定するようにしてもよい。もちろん、これ以外の基準でもよい。
【0030】
ステップS12では、演算制御部10aは、送信アンテナ10dから送信するUWB信号のパルスの頻度を低減させる。図3は送信アンテナ10dから送信するUWB信号のパルスを示す図である。ここで、図3(A)は、通常状態において送信されるパルスを示している。この図に示すように、通常状態(渋滞が発生していない場合)においては、振幅A1のパルスが周期T1で送信される。一方、ステップS12の処理により、頻度が低減されると、例えば、図3(B)に示すように、振幅A1のパルスが周期T2(>T1)で送信される。なお、図3(B)の例では、通常状態の1/2の頻度で送信されているが、もちろん、これ以外の頻度に低減してもよい。
【0031】
ステップS13では、演算制御部10aは、受信信号に対する積分時間を増加させる。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を増加させる。これにより、積分されるパルスの数が増加することから、渋滞によって他の車両からの電波が増加した場合であっても、自車両の受信信号との間の相関が低い他の車両からの電波を平均化によってノイズ成分として低減し、その影響を抑制することができる。
【0032】
ステップS14では、演算制御部10aは、渋滞が深刻か否かを判定し、深刻であると判定した場合(ステップS14:Yes)にはステップS15に進み、それ以外の場合(ステップS14:No)にはステップS18に進む。なお、ステップS14では、ステップS11よりも渋滞がより深刻であるか否かを判定の基準とする。具体的には、ステップS10で取得した渋滞情報を参照し、自車両を中心とする半径10mのエリア内に車両が20台以上存在する場合には渋滞が深刻であると判定してステップS15に進み、それ以外の場合にはステップS18に進む。もちろん、これ以外のエリアであったり、台数であったりしてもよい。
【0033】
ステップS15では、演算制御部10aは、渋滞が深刻であることから、検出の信頼性が低いことを示す情報を出力する。すなわち、渋滞が深刻である場合には、ステップS12およびステップS13の処理が実行されても、検出精度が十分に確保できない可能性があることから、そのような場合には、演算制御部10aは、検出結果を示す情報とともに、検出結果の信頼性が低いことを示す情報を出力する。このような情報を受信した上位の装置では、検出結果の信頼性が低いことを考慮し、例えば、複数回の検出結果に基づいて判断を行ったり、あるいは、他の情報源(例えば、対象物を監視するカメラ)からの情報を合わせて参酌したりして、制御を行うようにすることで、信頼性の低さを補うことができる。
【0034】
ステップS16では、演算制御部10aは、自車両の周辺で渋滞が発生していないことから、送信アンテナ10dから送信するUWB信号のパルスの頻度を通常に戻す。具体的には、図3(B)に示す状態から、図3(A)に示す状態に復元する。
【0035】
ステップS17では、演算制御部10aは、受信信号に対する積分時間を通常に戻す。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を通常の時間に復元する。
【0036】
ステップS18では、演算制御部10aは、演算制御部10aは、渋滞が生じていないか、あるいは、生じていてもステップS13およびステップS14の処理によって検出精度が確保できることから、検出結果の信頼性が高いことを示す情報を出力する。
【0037】
以上の処理によれば、車両の周辺で渋滞が発生している場合には、UWB信号のパルスの頻度を低減することで、他の車両との間の干渉を低減するとともに、受信信号の積分時間を増加することによって、他の車両から送信されるUWB信号の影響を低減することができる。これによって、渋滞時であっても、車載レーダ装置10の検出精度が低下することを防止できる。
【0038】
また、以上の処理では、渋滞が深刻である場合(所定以上の台数の車両が自車両を中心とするエリア内に存在する場合)には、ステップS12およびステップS13の処理によっても検出精度の低下を補うことができないため、信頼性が低いことを示す情報を検出結果とともに出力する。これにより、上位の装置は、検出精度の高低を知るとともに、検出精度の高低に応じた処理を実行することができる。
【0039】
つぎに、図4を参照して、天候情報に基づく動作について説明する。このフローチャートの処理が開始されると、以下のステップが実行される。
【0040】
ステップS30では、演算制御部10aは、広域通信部10hに対して天候情報を取得するように要求する。この結果、広域通信部10hは、例えば、図示しないGPS制御部から自車両の現在位置に関する情報を取得し、自車両の周辺の天候情報40bをサーバ40に送信するように要求する。サーバ40は、車載レーダ装置10からの要求に応じて自車両の周辺の天候情報40bを取得し、ネットワーク30および基地局20を介して広域通信部10hに送信する。この結果、演算制御部10aは、広域通信部10hから自車両の周辺の天候情報40bを取得する。なお、ここで、天候情報とは、自車両の周辺の天候(晴、曇、雨、雪、雹等)、降水量、気温、および、これらの時間的な変化を示す情報である。もちろん、これらの一部だけの情報であったり、または、これら以外の情報を含んでいたりしてもよい。なお、降水量には、雨だけでなく、雪、雹等の降下量も含むものとする。
【0041】
ステップS31では、演算制御部10aは、ステップS30で取得した天候情報40bを参照して自車両の周辺で降水が発生しているか否かを判定し、発生していると判定した場合(ステップS31:Yes)にはステップS32に進み、それ以外の場合(ステップS31:No)にはステップS36に進む。例えば、自車両が位置している場所に、所定量(例えば、10mm/h)以上の降水があると判定した場合にはステップS32に進み、それ以外の場合にはステップS36に進む。なお、前述した10mm/hは、一例であって、これ以外の値であってもよいことはいうまでもない。
【0042】
ステップS32では、演算制御部10aは、送信アンテナ10dから送信するUWB信号のパルスの電力を増加させる。具体的には、図3(D)に示すように、振幅をA1からA3(>A1)に増加させる。なお、図3(D)の例では、通常状態の2倍の振幅とされているが、もちろん、これ以外の振幅(例えば、1.5倍等)であってもよい。
【0043】
ステップS33では、演算制御部10aは、受信信号に対する積分時間を増加させる。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を増加させる。これにより、積分されるパルスの数が増加することから、平均化によりバックグラウンドのノイズ成分が低減されるため、着水、着氷、または、降雨減衰によって受信信号の強度が低下し、S/N比が低下した場合であっても、その影響を抑制することができる。
【0044】
ステップS34では、演算制御部10aは、降水量が所定量よりも多いか否かを判定し、所定量よりも多いと判定した場合(ステップS34:Yes)にはステップS35に進み、それ以外の場合(ステップS34:No)にはステップS38に進む。なお、ステップS34では、ステップS31よりも降水量がより多いか否かを判定の基準とする。具体的には、ステップS30で取得した天候情報40bを参照し、降水量が20mm/hを超える場合には、降水量が所定量よりも多いと判定してステップS35に進み、それ以外の場合にはステップS38に進む。もちろん、前述した以外の数値であってもよい。
【0045】
ステップS35では、演算制御部10aは、降水量が多いことから、検出の信頼性が低いことを示す情報を出力する。すなわち、降水量が多い場合には、ステップS32およびステップS33の処理が実行されても、検出精度が十分に確保できない可能性があることから、演算制御部10aは、検出結果を示す情報とともに、検出結果の信頼性が低いことを示す情報を出力する。このような情報を受信した上位の装置では、前述の場合と同様に、検出結果の信頼性が低いことを参酌し、例えば、複数回の検出結果に基づいて判断を行ったり、あるいは、他の情報源である対象物を監視するカメラからの情報を合わせて参酌したりして、制御を行うようにすることで、信頼性の低さを補うことができる。
【0046】
ステップS36では、演算制御部10aは、自車両の周辺で降水が発生していないことから、送信アンテナ10dから送信するUWB信号のパルスの電力を通常に戻す。具体的には、図3(D)に示す状態から、図3(A)に示す状態に復元する。
【0047】
ステップS37では、演算制御部10aは、受信信号に対する積分時間を通常に戻す。より詳細には、演算制御部10aは、受信したUWB信号のパルスに対する積分の時間を通常の時間に復元する。
【0048】
ステップS38では、演算制御部10aは、演算制御部10aは、降水が生じていないか、あるいは、生じていてもステップS33およびステップS34の処理によって検出精度が確保できることから、検出結果の信頼性が高いことを示す情報を出力する。
【0049】
以上の処理によれば、自車両の周辺で降水が発生している場合には、UWB信号のパルスの電力を増加することで、着水、着氷、または、降雨減衰による検出精度の低下を抑制することができる。これによって、降水時であっても、車載レーダ装置10の検出精度が低下することを防止できる。
【0050】
また、以上の処理では、降水量が多い場合には、ステップS32およびステップS33の処理によっても検出精度の低下を補うことができないため、信頼性が低いことを示す情報を検出結果とともに出力するようにした。これにより、上位の装置は、検出精度の高低を知るとともに、検出精度の高低に応じた処理を実行することができる。
【0051】
(D)変形実施形態
なお、上記の実施形態は、一例であって、これ以外にも各種の変形実施態様が存在する。例えば、図2に示すフローチャートでは、渋滞が発生している場合にはステップS12において、図3(B)に示すようにパルスの頻度を低減するようにしたが、例えば、図3(C)に示すように、パルスの振幅をA2(<A1)に減少させるようにしてもよい。あるいは、パルスの頻度の低減と、パルスの振幅の減少とを合わせて実行するようにしてもよい。
【0052】
また、図2に示すフローチャートでは、渋滞が発生した場合には、パルスの頻度の低減と積分時間の増加を同時に実行するようにしたが、いずれか一方のみを実行するようにしてもよい。あるいは、渋滞の状態に応じて、例えば、渋滞が深刻でない場合(自車両を中心とする一定範囲内の車両数が所定の台数未満の場合)には積分時間の増加のみを実行し、渋滞が深刻になった場合(自車両を中心とする一定範囲内の車両数が所定の台数以上の場合)にはパルスの頻度を低下させるようにしてもよい。あるいは、この逆でもよい。また、パルスの頻度の低減およびパルスの振幅の減少については、渋滞の度合いに応じて変更するようにしてもよい。
【0053】
また、信頼性を示す情報については、高および低の2種類としたが、例えば、渋滞の状況に応じて3種類以上としてもよい。例えば、3種類の場合には高、中、低としてもよい。
【0054】
また、図4に示すフローチャートでは、降水が発生している場合にはステップS32において、図3(D)に示すようにパルスの振幅を増加するようにしたが、例えば、パルスの頻度を増加させたり、各パルスの持続時間を増加させたりするようにしてもよい。
【0055】
また、図2に示すフローチャートでは、降水が発生した場合には、パルスの電力の増加と積分時間の増加を同時に実行するようにしたが、いずれか一方のみを実行するようにしてもよい。あるいは、降水の状態に応じて、例えば、降水量が少ない場合(降水量が所定量未満である場合)には積分時間の増加のみを実行し、降水量が多くなった場合(降水量が所定量以上である場合)にはパルスの電力を増加するようにしてもよい。あるいは、この逆でもよい。また、パルスの電力の増加量については、渋滞の度合いに応じて変更するようにしてもよい。
【0056】
また、以上の実施形態では、渋滞と降雨が同時に発生した場合については言及していないが、これらが同時に発生した場合には、例えば、積分時間のみを増加させ、パルスの電力の増加およびパルスの頻度の低減については実行しないようにしてもよい。あるいは、渋滞と降水のいずれが深刻かを判定し、例えば、降水が与える影響の方が深刻な場合にはパルスの電力を増加し、渋滞が与える影響の方が深刻な場合にはパルスの頻度を低減するようにしてもよい。
【0057】
また、以上の実施形態では、パルス信号としてのUWB信号を使用する場合を例に挙げて説明したが、これ以外の信号を用いるようにしてもよい。例えば、連続波信号を用いることも可能であり、その場合には、図2のステップS12の処理では、連続波信号を、間欠的に送信するようにすればよい。また、図4のステップS32の処理では、図3(D)と同様に連続波の振幅を増加するようにすればよい。
【0058】
また、以上の実施形態では、降水による通過減衰を主に例に挙げて説明したが、例えば、(1)降雨によって車載レーダ装置10が内蔵されている車両のバンパの表面に水膜が形成された場合や、(2)降雪によってバンパの表面に雪が付着した場合や、(3)降水後の温度低下によってバンパの表面に着氷が生じた場合にも同様の感度低下が生じる。そこで、これらを天候情報に基づいて検出するようにしてもよい。具体的には、(1)については、車両が走行開始する所定の時間以内(例えば、1時間以内)に降雨があった場合には水膜が形成されていると想定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。また、(2)の場合には車両が走行開始する所定の時間以内(例えば、6時間以内)に降雪があった場合には雪が付着していると想定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。また、(3)の場合は、気温が氷点下であって、所定の時間内に降雨または降雪があった場合には着氷が生じていると判定できるので、その場合には図4のステップS31においてYesと判定するようにしてもよい。
【符号の説明】
【0059】
10 車載レーダ装置
10a 演算制御部(検出手段の一部、制御手段)
10b 送信部(検出手段の一部)
10c 増幅部(検出手段の一部)
10d 送信アンテナ(検出手段の一部)
10e 受信アンテナ(検出手段の一部)
10f 増幅部(検出手段の一部)
10g 受信部(検出手段の一部)
10h 広域通信部(取得手段)
20 基地局(通信網の一部)
30 ネットワーク(通信網の一部)
40 サーバ
40a 渋滞情報(周辺情報)
40b 天候情報(周辺情報)
【特許請求の範囲】
【請求項1】
車両の周囲の対象物を検出する車載レーダ装置において、
車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段と、
通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段と、
前記取得手段によって取得された前記周辺情報に基づいて、前記検出手段の検出精度の低下を抑制するように前記検出手段を制御する制御手段と、
を有することを特徴とする車載レーダ装置。
【請求項2】
前記取得手段は、前記周辺情報として車両周辺の渋滞情報を取得し、
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定される場合には、周囲に送信する信号の平均電力を減少させ、他車両が送信する信号との干渉を抑えることにより、前記検出手段の検出精度の低下を抑制することを特徴とする請求項1に記載の車載レーダ装置。
【請求項3】
前記取得手段は、前記周辺情報として車両周辺の天候情報を取得し、
前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定される場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項1または2に記載の車載レーダ装置。
【請求項4】
前記制御手段は、前記天候情報によって車両周辺で降水が生じていると判定した場合は、検出精度が低下する天候状況が発生していると判定し、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項3に記載の車載レーダ装置。
【請求項5】
前記取得手段は、前記周辺情報として車両周辺の渋滞情報または天候情報を取得し、
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合、または、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、前記検出手段によって検出される情報の信頼性が低いことを示す情報を出力することを特徴とする請求項1乃至4のいずれか1項に記載車載レーダ装置。
【請求項6】
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項2に記載の車載レーダ装置。
【請求項7】
前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、周囲に送信する信号の平均電力を増加させることにより、前記検出手段の検出精度の低下を抑制することを特徴とする請求項3乃至5のいずれか1項に記載車載レーダ装置。
【請求項8】
車両の周囲の対象物を検出する車載レーダ装置の制御方法において、
車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出ステップと、
通信網を介して車両の周辺の状況を示す周辺情報を取得する取得ステップと、
前記取得ステップにおいて取得された前記周辺情報に基づいて、前記検出ステップの検出精度の低下を抑制するように前記検出ステップを制御する制御ステップと、
を有することを特徴とする車載レーダ装置の制御方法。
【請求項1】
車両の周囲の対象物を検出する車載レーダ装置において、
車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出手段と、
通信網を介して車両の周辺の状況を示す周辺情報を取得する取得手段と、
前記取得手段によって取得された前記周辺情報に基づいて、前記検出手段の検出精度の低下を抑制するように前記検出手段を制御する制御手段と、
を有することを特徴とする車載レーダ装置。
【請求項2】
前記取得手段は、前記周辺情報として車両周辺の渋滞情報を取得し、
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定される場合には、周囲に送信する信号の平均電力を減少させ、他車両が送信する信号との干渉を抑えることにより、前記検出手段の検出精度の低下を抑制することを特徴とする請求項1に記載の車載レーダ装置。
【請求項3】
前記取得手段は、前記周辺情報として車両周辺の天候情報を取得し、
前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定される場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項1または2に記載の車載レーダ装置。
【請求項4】
前記制御手段は、前記天候情報によって車両周辺で降水が生じていると判定した場合は、検出精度が低下する天候状況が発生していると判定し、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項3に記載の車載レーダ装置。
【請求項5】
前記取得手段は、前記周辺情報として車両周辺の渋滞情報または天候情報を取得し、
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合、または、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、前記検出手段によって検出される情報の信頼性が低いことを示す情報を出力することを特徴とする請求項1乃至4のいずれか1項に記載車載レーダ装置。
【請求項6】
前記制御手段は、前記渋滞情報によって車両周辺に渋滞が生じていると判定した場合には、前記反射信号に対する積分時間を増加させることにより検出精度の低下を抑制することを特徴とする請求項2に記載の車載レーダ装置。
【請求項7】
前記制御手段は、前記天候情報によって検出精度が低下する天候状況が発生していると判定した場合には、周囲に送信する信号の平均電力を増加させることにより、前記検出手段の検出精度の低下を抑制することを特徴とする請求項3乃至5のいずれか1項に記載車載レーダ装置。
【請求項8】
車両の周囲の対象物を検出する車載レーダ装置の制御方法において、
車両の周囲に信号を送信し、対象物によって反射された反射信号に基づいて車両の周囲の対象物を検出する検出ステップと、
通信網を介して車両の周辺の状況を示す周辺情報を取得する取得ステップと、
前記取得ステップにおいて取得された前記周辺情報に基づいて、前記検出ステップの検出精度の低下を抑制するように前記検出ステップを制御する制御ステップと、
を有することを特徴とする車載レーダ装置の制御方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−83540(P2013−83540A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223560(P2011−223560)
【出願日】平成23年10月11日(2011.10.11)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005290)古河電気工業株式会社 (4,457)
【出願人】(391045897)古河AS株式会社 (571)
【Fターム(参考)】
[ Back to top ]