
車載レーダ装置および電波干渉防止プログラム
【課題】処理負荷を高めることなく電波干渉を防止することが可能な車載レーダ装置、および、電波干渉防止プログラムを提供すること。
【解決手段】電波を対象物に向けて送信する送信手段と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段と、自車両運転者が危険を認知したことを判定するための危険認知判定手段と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段とを備える。
【解決手段】電波を対象物に向けて送信する送信手段と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段と、自車両運転者が危険を認知したことを判定するための危険認知判定手段と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載レーダ装置に関し、より特定的には、車載レーダ装置間で発生する電波干渉対策に関する。
【背景技術】
【0002】
近年、自車両と対象との相対距離や相対速度を検知する車載レーダ装置を搭載した車両が増加している。そして、当該車載レーダ装置を利用して衝突予知等の処理を実行することで危険を回避し、事故の発生を未然に防ぐという試みがなされている。その一方で、上記の車載レーダ装置を搭載する車両が複数存在し、各々がそれぞれ電波を発信する状況では、電波の相互干渉が発生する可能性も高い。そして、電波干渉が生じた結果、レーダ装置としての機能が損なわれてしまうおそれがある。このような問題に対して、自車両の送信信号と他車両の送信信号との電波干渉が生じていると判定したときに、自車両の送信信号の送信タイミングを変更し、自車両と他車両との相対距離を検出して衝突予知を行う車載レーダ装置が開示されている(例えば、特許文献1)。また、電波を送信する前に干渉波の有無を調べ、干渉波があれば干渉波の偏波方向を計算し、その干渉波の偏波方向に対して偏波抑圧の高い偏波方向で送信するよう偏波の切換を行うレーダ装置も知られている(例えば、特許文献2)。当該レーダ装置では、他の装置類からの干渉波の偏波方向に対して偏波抑圧の高い偏波方向で、送受信を行うことで、同一周波数帯を使用する他の装置類からの干渉波に対して適切な偏波抑圧を行うことで干渉除去を行い、レーダ装置の誤動作を防止できる。
【特許文献1】特開2007−155551号公報
【特許文献2】特開平7−58042号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述したような車載レーダ装置においては、従来から以下に示す問題点があった。すなわち、上記特許文献1および特許文献2の技術は共に電波干渉対策の処理としては、かなり複雑な処理を必要としており、ECUの処理負荷も高くなるものであった。そのため、自車と他車が急接近しているという状態等において電波干渉対策の処理に時間がかかってしまい、衝突予知が間に合わない場合が生じる可能性があった。
【0004】
それ故に、本発明の目的は、処理負荷を高めることなく電波干渉を防止することが可能な車載レーダ装置、および、電波干渉防止プログラムを提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施形態との対応関係の一例を示したものであって、本発明を何ら限定するものではない。
【0006】
第1の発明は、電波を対象物に向けて送信する送信手段(12)と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段(13)と、自車両運転者が危険を認知したことを判定するための危険認知判定手段(11)と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段(11)とを備えた車載レーダ装置である。
【0007】
第1の発明によれば、衝突等の危険が発生する可能性が高い状況において、自車両の電波送信を停止するという処理負荷の低い処理を実行することで、他の車両の車載レーダ装置との間で電波干渉が発生することを防ぐ事ができる。これにより、他の車両側の車載レーダ装置を正常に作動させて危険を回避することが可能となる。
【0008】
第2の発明は、第1の発明において、車載レーダ装置は、ブレーキ操作が行われたか否かを判定するブレーキ操作判定手段を更に備える。そして、危険認知判定手段は、ブレーキ操作が行われたと判定されたときに、自車両運転者が危険を認知したと判定する。
【0009】
第3の発明は、第2の発明において、車載レーダ装置は、自車両のブレーキペダルの踏み込み量を検出するための踏み込み量検出手段と、所定の加速度センサに基づいて自車両に加わった加速度を検出する加速度検出手段とを更に備える。そして、ブレーキ操作判定手段は、自車両のブレーキペダルの踏み込み量、ブレーキ油圧、および加速度の少なくとも1つ以上に基づいてブレーキ操作が行われたか否かを判定する。
【0010】
第2乃至第3の発明によれば、ブレーキ操作が行われたときに、運転者が危険を認知したと扱うことができ、より適切な電波干渉防止を実行することができる。
【0011】
第4の発明は、第1乃至第2の発明において、車載レーダ装置は、電波送信停止手段によって電波の送信が停止された後、所定時間内に他の車両の車載レーダ装置からの電波を受信手段が受信したか否かを判定する停止後受信判定手段と、停止後受信判定手段が、所定時間内に他の車両からの電波を受信しなかったと判定したときは、送信手段に電波の送信を再開させる、送信再開手段とを更に備える。
【0012】
第4の発明によれば、他の車両が車載レーダ装置を有していれば、当該他の車両の車載レーダ装置によって危険を回避し、他の車両が車載レーダ装置を有していないときは、自車両の車載レーダ装置によって危険を回避することができる。
【0013】
第5の発明は、第1の発明において、車載レーダ装置は、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、自車量の進行方向に障害物が存在するか否かを検出するための進行方向障害物検出手段を更に備える。そして、電波送信停止手段は、自車両運転者が危険を認知したと危険認知判定手段が判定し、かつ、車両の進行方向に障害物が存在しないことを進行方向障害物検出手段が検出したときに、電波の送信を停止する。
【0014】
第5の発明によれば、危険の原因が、電波干渉を起こしている他の車両ではない場合に電波の送信を続行させることができ、危険を回避することが可能となる。
【0015】
第6の発明は、第1乃至第2の発明において、車載レーダ装置は、自車両の進行方向を少なくとも含んだ自車両の周囲の異なる方向へそれぞれ電波を送信する複数の前記送信手段および当該複数の送信手段に対応する複数の受信手段を備えており、電波送信停止手段は、複数の送信手段のうち、自車両の進行方向にかかる送信手段からの電波の送信のみを停止する。
【0016】
第6の発明によれば、車両の進行方向にかかる危険を回避すると共に、後続車両の追突等、進行方向以外の方向にかかる危険の回避も行うことが可能となる。
【0017】
第7の発明は、電波を対象物に向けて送信する送信手段と、当該送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段とを備える車載レーダ装置のコンピュータに実行させるための電波干渉防止プログラムであって、コンピュータを、自車両運転者が危険を認知したことを判定するための危険認知判定手段(S1)と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段(S4)として機能させる。
【0018】
第7の発明によれば、第1の発明と同様の効果が得られる。
【発明の効果】
【0019】
本発明によれば、危険が発生する可能性が高い状況において、車載レーダ装置間の電波干渉の発生を防ぐことができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について、図面を参照して説明する。尚、この実施例により本発明が限定されるものではない。
【0021】
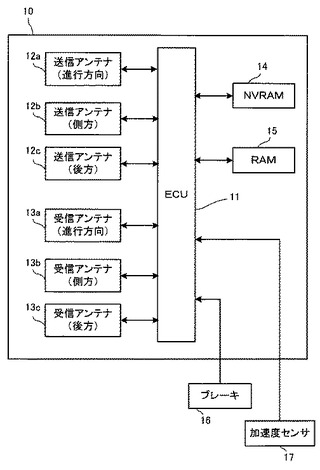
図1は、本発明の実施形態に係る車載レーダ装置の一例を示すブロック図である。図1において、レーダ装置10は、ECU11と、送信アンテナ12a〜12cと、受信アンテナ13a〜13cと、NVRAM(Non Volatile RAM)14とRAM15とで構成されている。また、ECU11は、ブレーキ16および加速度センサ17とも接続されている。
【0022】
ECU11は、後述するようなフローチャートの処理を実行することで、本実施形態にかかる電波干渉防止処理を実現する。
【0023】
送信アンテナ12は、ECU11の制御に基づいて電波を送信するためのアンテナであり、車両周囲に配置されている。すなわち、車両前方へ電波を送信する送信アンテナ12aと、車両側方へ電波を送信する送信アンテナ12b(厳密には左右それぞれに存在するが、ここでは1つにまとめて示す)と、車両後方へ電波を送信する送信アンテナ12cが配置されている。
【0024】
受信アンテナ13は、送信アンテナ12の出力した電波の反射波を受信するためのアンテナであり、送信アンテナ12a〜12cと対応するようにして車両前方の受信アンテナ13a、車両側方の受信アンテナ13b、車両後方の受信アンテナ13cが配置される。また、受信した電波の強度等を示すデータをECU11に出力する。また、受信アンテナ13は、他車の車載レーダ装置の送信アンテナから出力された電波も受信可能である。
【0025】
NVRAM14は、不揮発性のメモリであり、後述する処理を実行するためのプログラムが格納されている。そして、当該プログラムが実行されるときは、RAM15上に読み出されて実行される。また、RAM15には、当該プログラムが実行される際に用いられる各種フラグ等の一時的なデータも格納される。
【0026】
ブレーキ16は、ブレーキペダルの踏み込み量を検出するためのセンサを備えており、当該踏み込み量を示すデータをECU11に出力する。
【0027】
加速度センサ17は、車両にかかる加速度を検出し、検出した加速度を示すデータをECU11へ出力する。
【0028】
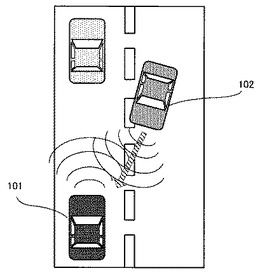
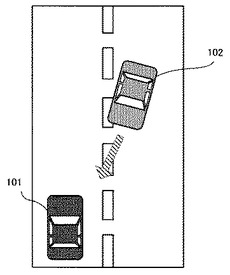
次に、本実施形態にかかる電波干渉防止処理の概要を説明する。図2および図3は、当該処理の概要を説明するための図である。まず、図2に示すように、車載レーダ装置を搭載している自車101および対向車102が存在し、双方とも電波送信を行っているとする。そして、対向車102は、車線を外れて自車101に接近しつつある状況を想定する。また、自車101と対向車102との間で電波干渉が発生しており、自車101、対向車102共に、相手を検知できていない状態となっている。このような場合に、自車101のドライバが対向車102の接近に気付き、ブレーキペダルを踏むとする。このときに、本実施形態では、図3に示すように、自車101の電波の送信をオフにする。これにより、上記電波干渉は解消され、対向車102の車載レーダ装置が自車101を検知することが可能となる。その結果、対向車102において危険回避のためのシステム、例えば、いわゆるプリクラッシュセーフィティシステム(以下、PCSと呼ぶ)が作動することで、結果的に危険回避、あるいは事故の被害の軽減を図ろうとするものである。
【0029】
つまり、本実施形態では、自車101のドライバがブレーキを踏んだ際に、ドライバが危険を認知したと判断して、自車の電波の送信をオフとすることで、危険が近づいている状態での電波干渉の発生を防ぐ。そして、対向車102のPCS等の危険回避システムを正常に作動させることによって危険回避を図るものである。このように、ドライバが危険を認知したことを判断し、このタイミングで電波の送信をオフとするという簡易な処理を実行することで、ECU11への処理負荷を高めることなく、電波干渉の発生を防ぐことが可能となる。
【0030】
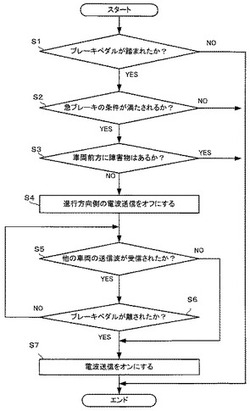
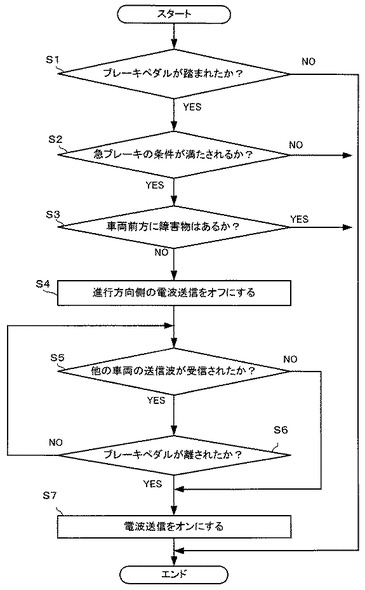
以下、図4〜図9を用いて、ECU11が行う電波干渉防止処理の詳細動作を説明する。図4は、本実施形態にかかる電波干渉防止処理の詳細を示すフローチャートである。図4において、まず、ECU11は、ブレーキ16から出力される信号に基づいて、ブレーキペダルが踏まれたか否かを判定する(ステップS1)。当該判定の結果、ブレーキペダルが踏まれていなければ(ステップS1でNO)、そのまま処理を終了する。一方、ブレーキペダルが踏まれていれば(ステップS1でYES)、その後ECU11は、上述のように電波の送信をオフとするための処理を行うが、本実施形態では、より適切な電波干渉防止を行うために、以下に述べるような処理が併せて実行される。
【0031】
ステップS1でブレーキペダルが踏まれたと判定されると、次に、ECU11は、ブレーキペダルの踏み込み量等が所定の条件を満たしているか否かを判定する(ステップS2)。これは、ステップS1で検出されたブレーキ操作が、危険を回避するためのブレーキ操作、典型的には急ブレーキであるのか、カーブで減速する場合のような、通常の運転操作の一環としてブレーキを踏んだのかを判定するものである。つまり、急ブレーキが踏まれたような場合には、ドライバが危険を認知したものとして扱い、それ以外の、通常の運転操作の一環としてのブレーキ操作であれば、電波はオフにせずにそのまま電波の送信を続行させるための処理である。
【0032】
このステップS2の処理をより具体的に説明すると、まず、ECU11は、ブレーキ16から、上述したような踏み込み量を示すデータを取得し、踏み込み量の大きさを算出する。また、ECU11は、踏み込み量の変化する速さ(所定の単位時間における踏み込み量の変化の度合い)を算出する。更に、ECU11は、加速度センサ17から加速度を示すデータを取得し、自車の加減速量を算出する。急ブレーキの場合は、一時的に大きな加速度が発生することから、当該加速度を用いることで、急ブレーキがかけられたか否かの判定が可能となる。そして、ECU11は、上記踏み込み量の大きさ、踏み込み量の変化する速さ、加減速量を総合的に判定して、急ブレーキがかけられたか否かを判定する。
【0033】
なお、急ブレーキがかけられたか否かの判定については、上記のようなブレーキペダルの踏み込み量や自車の加速度の他、例えば、油圧式ブレーキを用いている車両であれば、ブレーキ油圧に基づいて判定するようにしてもよい。
【0034】
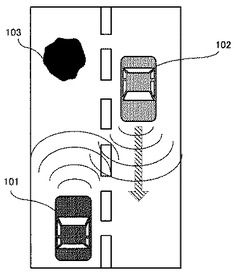
ステップS2の判定の結果、ブレーキペダルの踏み込み量等が所定の条件を満たしていない、つまり、通常の運転操作におけるブレーキ操作である場合は(ステップS2でNO)、ECU11は、処理を終了する。一方、ブレーキペダルの踏み込み量等が所定の条件を満たしている、つまり、急ブレーキであると判定されたときは(ステップS2でYES)、ECU11は、次に、車両前方に障害物が存在するか否かを判定する(ステップS3)。より具体的には、受信アンテナ13で受信する反射波の有無等に基づいて、自車の前方に障害物が存在するか否かを判定する。この処理は、図5に示すような状況を想定した処理である。図5では、自車101の前方(進行方向)に、例えば落石のような障害物103が存在している。同時に、対向車線にも対向車102が存在している。また、自車101、対向車102ともに電波を送信しており、電波干渉が発生している状態であるとする。このような場合、電波干渉の影響で自車の斜め前に位置する対向車102の検出はできないが、自車の進行方向に存在し、かつ、電波を出していない障害物103については自車101で検出できる場合がある。そこで、このように、急ブレーキが踏まれた際に進行方向の障害物について検出できる場合は、前方にある当該障害物との衝突の危険を回避すべく、電波の送信はオフにしないようにする。つまり、危険の原因が、電波干渉を起こしている車両ではないような場合は、電波の送信を続行させるものである。
【0035】
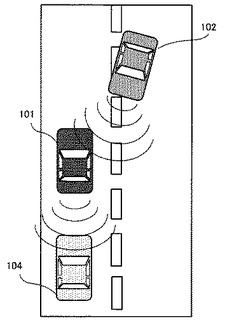
図4に戻り、ステップS3の判定の結果、自車の前方に障害物が検出されたときは(ステップS3でYES)、ECU11は、電波の送信はオフにせずに、そのまま処理を終了する。なお、当該障害物の検知にかかる原理や基本的な制御手法等については当業者には既知であるため、詳しい説明は省略する。一方、自車の前方に障害物が検出されなかったときは(ステップS3でNO)、次に、ECU11は、進行方向にかかる送信アンテナ12aからの電波の送信をオフにする(ステップS4)。ここで、進行方向にかかる送信アンテナ12aのみの電波送信をオフにするのは、図6に示すような状況を想定したものである。図6においては、自車101の後方に後続車両104が存在している。また、対向車102が自車に向かって接近している状態である。また、自車101と対向車102との間では電波干渉が発生している状態である。このような場合、自車101のドライバが急ブレーキをかけたということは、自車101の進行方向に危険があると推測される(図6の場合は、ドライバが対向車102の接近に気付いた状況である)。その一方で、図6の場合、急ブレーキの影響で、後続車両の追突の危険性もある。そのため、図7に示すように、自車の進行方向のみ電波の送信をオフとし、後方の電波送信は有効な状態としておく。これにより、対向車102との間の電波干渉を解消して、車両前方にかかる危険の回避等を図ると共に、後続車両104については車載レーダでその存在を検知し、追突の恐れがある場合は適宜自車101のPCSを作動させることで、車両後方にかかる危険の回避等を図るものである。
【0036】
図4に戻り、ステップS4の処理の次に、ECU11は、受信アンテナ13aからの出力に基づいて、電波の送信停止後、所定時間内に他の車両の車載レーダ装置からの送信波を受信したか否かを判定する(ステップS5)。当該処理は、図8に示すような、車載レーダ装置を搭載していない対向車102(他の車両)の存在を想定している。つまり、図8において、対向車102の存在に気付き、自車101のドライバが急ブレーキをかけたとき、上記ステップS4の処理によって、一旦車両前方への電波の送信はオフにされるが(図8の状態)、対向車102は車載レーダ装置を搭載していないため、そもそも電波干渉は起こっていない状態である。このような場合は、図9に示すように、自車101の前方への電波の送信を再開して、自車101のPCS等を動作させることを図ったものである。換言すれば、対向車102が車載レーダ装置を有していれば、対向車102の車載レーダ装置によって危険を回避し、対向車102が車載レーダ装置を有していないときは、自車の車載レーダ装置によって危険を回避しようとするものである。
【0037】
図4に戻り、ステップS5で他の車両からの電波が受信したと判定されたときは(ステップS5でYES)、ECU11は、ブレーキペダルが離されたか否かをブレーキ16からの出力に基づいて判定する(ステップS6)。当該判定の結果、ブレーキペダルが離されていなければ(ステップS6でNO)、危険が近づいている状態と考えられる。そのため、ECU11は、上記ステップS5に戻り、処理を繰り返す。一方、ブレーキペダルが離されていれば(ステップS6でYES)、危険は回避したと考えられるため、ECU11は、送信アンテナ12aからの電波の送信を再開する(ステップS7)。
【0038】
一方、上記ステップS5で他の車両からの電波が受信したと判定されなかったときは(ステップS5でNO)、車載レーダ装置を搭載していない車両が近づいている状況と考えられるため、ECU11は上記ステップS7の処理に進み、送信アンテナ12aからの電波の送信を再開する。その結果、自車101のPCS等を作動させ、危険の回避等を図ることが可能となる。以上で、本実施形態にかかる電波干渉防止処理は終了する。
【0039】
このように、本実施形態では、車載レーダ装置同士で電波干渉が発生しているような状況において、一方の車両のドライバがブレーキを踏んだときのような、ドライバが危険を認知したと考えられるときに当該ドライバの車両の車載レーダ装置の電波の送信をオフにする。これにより、車載レーダ装置同士での電波干渉が発生することを防ぐことができる。その結果、他方の車両の車載レーダ装置を正常に動作させることで他方の車両側の危険回避のためのシステム等を作動させ、結果的に危険を回避することが可能となる。また、ブレーキの踏み込みを判定するという簡易な処理ですむため、電波干渉を回避するための複雑な処理(電波の送信タイミングの変更や位相変調処理等)を行うことでECUへの処理負荷が高くなることを防ぐことができ、危険発生時における迅速な危険回避処理が可能となる。
【0040】
なお、上述の実施形態では、ドライバが危険を認知したことの例としてブレーキをかけた場合で説明したが、これに限らず、例えばドライバの生理情報(瞳孔の開き具合や脈拍等)の変化を監視するようにし、所定の変化が検出されたときにドライバが危険を認知したと判定するようにしてもよい。
【産業上の利用可能性】
【0041】
本発明にかかる車載レーダ装置および電波干渉防止プログラムは、危険が発生する可能性が高い状況において車載レーダ装置間に発生する電波干渉を防止することができ、各種車載レーダ装置やこれを搭載する車両等に有用である。
【図面の簡単な説明】
【0042】
【図1】本発明の実施形態に係る車載レーダ装置の一例を示すブロック図
【図2】本実施形態にかかる電波干渉防止処理の概要を説明するための図
【図3】本実施形態にかかる電波干渉防止処理の概要を説明するための図
【図4】本実施形態にかかる電波干渉防止処理の詳細を示すフローチャート
【図5】図4のステップS3の処理を補足説明するための図
【図6】図4のステップS4の処理を補足説明するための図
【図7】図4のステップS4の処理を補足説明するための図
【図8】図4のステップS5の処理を補足説明するための図
【図9】図4のステップS5の処理を補足説明するための図
【符号の説明】
【0043】
10 車載レーダ装置
11 ECU
12 送信アンテナ
13 受信アンテナ
14 NVRAM
15 RAM
16 ブレーキ
17 加速度センサ
【技術分野】
【0001】
本発明は、車載レーダ装置に関し、より特定的には、車載レーダ装置間で発生する電波干渉対策に関する。
【背景技術】
【0002】
近年、自車両と対象との相対距離や相対速度を検知する車載レーダ装置を搭載した車両が増加している。そして、当該車載レーダ装置を利用して衝突予知等の処理を実行することで危険を回避し、事故の発生を未然に防ぐという試みがなされている。その一方で、上記の車載レーダ装置を搭載する車両が複数存在し、各々がそれぞれ電波を発信する状況では、電波の相互干渉が発生する可能性も高い。そして、電波干渉が生じた結果、レーダ装置としての機能が損なわれてしまうおそれがある。このような問題に対して、自車両の送信信号と他車両の送信信号との電波干渉が生じていると判定したときに、自車両の送信信号の送信タイミングを変更し、自車両と他車両との相対距離を検出して衝突予知を行う車載レーダ装置が開示されている(例えば、特許文献1)。また、電波を送信する前に干渉波の有無を調べ、干渉波があれば干渉波の偏波方向を計算し、その干渉波の偏波方向に対して偏波抑圧の高い偏波方向で送信するよう偏波の切換を行うレーダ装置も知られている(例えば、特許文献2)。当該レーダ装置では、他の装置類からの干渉波の偏波方向に対して偏波抑圧の高い偏波方向で、送受信を行うことで、同一周波数帯を使用する他の装置類からの干渉波に対して適切な偏波抑圧を行うことで干渉除去を行い、レーダ装置の誤動作を防止できる。
【特許文献1】特開2007−155551号公報
【特許文献2】特開平7−58042号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述したような車載レーダ装置においては、従来から以下に示す問題点があった。すなわち、上記特許文献1および特許文献2の技術は共に電波干渉対策の処理としては、かなり複雑な処理を必要としており、ECUの処理負荷も高くなるものであった。そのため、自車と他車が急接近しているという状態等において電波干渉対策の処理に時間がかかってしまい、衝突予知が間に合わない場合が生じる可能性があった。
【0004】
それ故に、本発明の目的は、処理負荷を高めることなく電波干渉を防止することが可能な車載レーダ装置、および、電波干渉防止プログラムを提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施形態との対応関係の一例を示したものであって、本発明を何ら限定するものではない。
【0006】
第1の発明は、電波を対象物に向けて送信する送信手段(12)と、送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段(13)と、自車両運転者が危険を認知したことを判定するための危険認知判定手段(11)と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段(11)とを備えた車載レーダ装置である。
【0007】
第1の発明によれば、衝突等の危険が発生する可能性が高い状況において、自車両の電波送信を停止するという処理負荷の低い処理を実行することで、他の車両の車載レーダ装置との間で電波干渉が発生することを防ぐ事ができる。これにより、他の車両側の車載レーダ装置を正常に作動させて危険を回避することが可能となる。
【0008】
第2の発明は、第1の発明において、車載レーダ装置は、ブレーキ操作が行われたか否かを判定するブレーキ操作判定手段を更に備える。そして、危険認知判定手段は、ブレーキ操作が行われたと判定されたときに、自車両運転者が危険を認知したと判定する。
【0009】
第3の発明は、第2の発明において、車載レーダ装置は、自車両のブレーキペダルの踏み込み量を検出するための踏み込み量検出手段と、所定の加速度センサに基づいて自車両に加わった加速度を検出する加速度検出手段とを更に備える。そして、ブレーキ操作判定手段は、自車両のブレーキペダルの踏み込み量、ブレーキ油圧、および加速度の少なくとも1つ以上に基づいてブレーキ操作が行われたか否かを判定する。
【0010】
第2乃至第3の発明によれば、ブレーキ操作が行われたときに、運転者が危険を認知したと扱うことができ、より適切な電波干渉防止を実行することができる。
【0011】
第4の発明は、第1乃至第2の発明において、車載レーダ装置は、電波送信停止手段によって電波の送信が停止された後、所定時間内に他の車両の車載レーダ装置からの電波を受信手段が受信したか否かを判定する停止後受信判定手段と、停止後受信判定手段が、所定時間内に他の車両からの電波を受信しなかったと判定したときは、送信手段に電波の送信を再開させる、送信再開手段とを更に備える。
【0012】
第4の発明によれば、他の車両が車載レーダ装置を有していれば、当該他の車両の車載レーダ装置によって危険を回避し、他の車両が車載レーダ装置を有していないときは、自車両の車載レーダ装置によって危険を回避することができる。
【0013】
第5の発明は、第1の発明において、車載レーダ装置は、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、自車量の進行方向に障害物が存在するか否かを検出するための進行方向障害物検出手段を更に備える。そして、電波送信停止手段は、自車両運転者が危険を認知したと危険認知判定手段が判定し、かつ、車両の進行方向に障害物が存在しないことを進行方向障害物検出手段が検出したときに、電波の送信を停止する。
【0014】
第5の発明によれば、危険の原因が、電波干渉を起こしている他の車両ではない場合に電波の送信を続行させることができ、危険を回避することが可能となる。
【0015】
第6の発明は、第1乃至第2の発明において、車載レーダ装置は、自車両の進行方向を少なくとも含んだ自車両の周囲の異なる方向へそれぞれ電波を送信する複数の前記送信手段および当該複数の送信手段に対応する複数の受信手段を備えており、電波送信停止手段は、複数の送信手段のうち、自車両の進行方向にかかる送信手段からの電波の送信のみを停止する。
【0016】
第6の発明によれば、車両の進行方向にかかる危険を回避すると共に、後続車両の追突等、進行方向以外の方向にかかる危険の回避も行うことが可能となる。
【0017】
第7の発明は、電波を対象物に向けて送信する送信手段と、当該送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段とを備える車載レーダ装置のコンピュータに実行させるための電波干渉防止プログラムであって、コンピュータを、自車両運転者が危険を認知したことを判定するための危険認知判定手段(S1)と、自車両運転者が危険を認知したと危険認知判定手段が判定したとき、送信手段からの電波の送信を停止する電波送信停止手段(S4)として機能させる。
【0018】
第7の発明によれば、第1の発明と同様の効果が得られる。
【発明の効果】
【0019】
本発明によれば、危険が発生する可能性が高い状況において、車載レーダ装置間の電波干渉の発生を防ぐことができる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施の形態について、図面を参照して説明する。尚、この実施例により本発明が限定されるものではない。
【0021】
図1は、本発明の実施形態に係る車載レーダ装置の一例を示すブロック図である。図1において、レーダ装置10は、ECU11と、送信アンテナ12a〜12cと、受信アンテナ13a〜13cと、NVRAM(Non Volatile RAM)14とRAM15とで構成されている。また、ECU11は、ブレーキ16および加速度センサ17とも接続されている。
【0022】
ECU11は、後述するようなフローチャートの処理を実行することで、本実施形態にかかる電波干渉防止処理を実現する。
【0023】
送信アンテナ12は、ECU11の制御に基づいて電波を送信するためのアンテナであり、車両周囲に配置されている。すなわち、車両前方へ電波を送信する送信アンテナ12aと、車両側方へ電波を送信する送信アンテナ12b(厳密には左右それぞれに存在するが、ここでは1つにまとめて示す)と、車両後方へ電波を送信する送信アンテナ12cが配置されている。
【0024】
受信アンテナ13は、送信アンテナ12の出力した電波の反射波を受信するためのアンテナであり、送信アンテナ12a〜12cと対応するようにして車両前方の受信アンテナ13a、車両側方の受信アンテナ13b、車両後方の受信アンテナ13cが配置される。また、受信した電波の強度等を示すデータをECU11に出力する。また、受信アンテナ13は、他車の車載レーダ装置の送信アンテナから出力された電波も受信可能である。
【0025】
NVRAM14は、不揮発性のメモリであり、後述する処理を実行するためのプログラムが格納されている。そして、当該プログラムが実行されるときは、RAM15上に読み出されて実行される。また、RAM15には、当該プログラムが実行される際に用いられる各種フラグ等の一時的なデータも格納される。
【0026】
ブレーキ16は、ブレーキペダルの踏み込み量を検出するためのセンサを備えており、当該踏み込み量を示すデータをECU11に出力する。
【0027】
加速度センサ17は、車両にかかる加速度を検出し、検出した加速度を示すデータをECU11へ出力する。
【0028】
次に、本実施形態にかかる電波干渉防止処理の概要を説明する。図2および図3は、当該処理の概要を説明するための図である。まず、図2に示すように、車載レーダ装置を搭載している自車101および対向車102が存在し、双方とも電波送信を行っているとする。そして、対向車102は、車線を外れて自車101に接近しつつある状況を想定する。また、自車101と対向車102との間で電波干渉が発生しており、自車101、対向車102共に、相手を検知できていない状態となっている。このような場合に、自車101のドライバが対向車102の接近に気付き、ブレーキペダルを踏むとする。このときに、本実施形態では、図3に示すように、自車101の電波の送信をオフにする。これにより、上記電波干渉は解消され、対向車102の車載レーダ装置が自車101を検知することが可能となる。その結果、対向車102において危険回避のためのシステム、例えば、いわゆるプリクラッシュセーフィティシステム(以下、PCSと呼ぶ)が作動することで、結果的に危険回避、あるいは事故の被害の軽減を図ろうとするものである。
【0029】
つまり、本実施形態では、自車101のドライバがブレーキを踏んだ際に、ドライバが危険を認知したと判断して、自車の電波の送信をオフとすることで、危険が近づいている状態での電波干渉の発生を防ぐ。そして、対向車102のPCS等の危険回避システムを正常に作動させることによって危険回避を図るものである。このように、ドライバが危険を認知したことを判断し、このタイミングで電波の送信をオフとするという簡易な処理を実行することで、ECU11への処理負荷を高めることなく、電波干渉の発生を防ぐことが可能となる。
【0030】
以下、図4〜図9を用いて、ECU11が行う電波干渉防止処理の詳細動作を説明する。図4は、本実施形態にかかる電波干渉防止処理の詳細を示すフローチャートである。図4において、まず、ECU11は、ブレーキ16から出力される信号に基づいて、ブレーキペダルが踏まれたか否かを判定する(ステップS1)。当該判定の結果、ブレーキペダルが踏まれていなければ(ステップS1でNO)、そのまま処理を終了する。一方、ブレーキペダルが踏まれていれば(ステップS1でYES)、その後ECU11は、上述のように電波の送信をオフとするための処理を行うが、本実施形態では、より適切な電波干渉防止を行うために、以下に述べるような処理が併せて実行される。
【0031】
ステップS1でブレーキペダルが踏まれたと判定されると、次に、ECU11は、ブレーキペダルの踏み込み量等が所定の条件を満たしているか否かを判定する(ステップS2)。これは、ステップS1で検出されたブレーキ操作が、危険を回避するためのブレーキ操作、典型的には急ブレーキであるのか、カーブで減速する場合のような、通常の運転操作の一環としてブレーキを踏んだのかを判定するものである。つまり、急ブレーキが踏まれたような場合には、ドライバが危険を認知したものとして扱い、それ以外の、通常の運転操作の一環としてのブレーキ操作であれば、電波はオフにせずにそのまま電波の送信を続行させるための処理である。
【0032】
このステップS2の処理をより具体的に説明すると、まず、ECU11は、ブレーキ16から、上述したような踏み込み量を示すデータを取得し、踏み込み量の大きさを算出する。また、ECU11は、踏み込み量の変化する速さ(所定の単位時間における踏み込み量の変化の度合い)を算出する。更に、ECU11は、加速度センサ17から加速度を示すデータを取得し、自車の加減速量を算出する。急ブレーキの場合は、一時的に大きな加速度が発生することから、当該加速度を用いることで、急ブレーキがかけられたか否かの判定が可能となる。そして、ECU11は、上記踏み込み量の大きさ、踏み込み量の変化する速さ、加減速量を総合的に判定して、急ブレーキがかけられたか否かを判定する。
【0033】
なお、急ブレーキがかけられたか否かの判定については、上記のようなブレーキペダルの踏み込み量や自車の加速度の他、例えば、油圧式ブレーキを用いている車両であれば、ブレーキ油圧に基づいて判定するようにしてもよい。
【0034】
ステップS2の判定の結果、ブレーキペダルの踏み込み量等が所定の条件を満たしていない、つまり、通常の運転操作におけるブレーキ操作である場合は(ステップS2でNO)、ECU11は、処理を終了する。一方、ブレーキペダルの踏み込み量等が所定の条件を満たしている、つまり、急ブレーキであると判定されたときは(ステップS2でYES)、ECU11は、次に、車両前方に障害物が存在するか否かを判定する(ステップS3)。より具体的には、受信アンテナ13で受信する反射波の有無等に基づいて、自車の前方に障害物が存在するか否かを判定する。この処理は、図5に示すような状況を想定した処理である。図5では、自車101の前方(進行方向)に、例えば落石のような障害物103が存在している。同時に、対向車線にも対向車102が存在している。また、自車101、対向車102ともに電波を送信しており、電波干渉が発生している状態であるとする。このような場合、電波干渉の影響で自車の斜め前に位置する対向車102の検出はできないが、自車の進行方向に存在し、かつ、電波を出していない障害物103については自車101で検出できる場合がある。そこで、このように、急ブレーキが踏まれた際に進行方向の障害物について検出できる場合は、前方にある当該障害物との衝突の危険を回避すべく、電波の送信はオフにしないようにする。つまり、危険の原因が、電波干渉を起こしている車両ではないような場合は、電波の送信を続行させるものである。
【0035】
図4に戻り、ステップS3の判定の結果、自車の前方に障害物が検出されたときは(ステップS3でYES)、ECU11は、電波の送信はオフにせずに、そのまま処理を終了する。なお、当該障害物の検知にかかる原理や基本的な制御手法等については当業者には既知であるため、詳しい説明は省略する。一方、自車の前方に障害物が検出されなかったときは(ステップS3でNO)、次に、ECU11は、進行方向にかかる送信アンテナ12aからの電波の送信をオフにする(ステップS4)。ここで、進行方向にかかる送信アンテナ12aのみの電波送信をオフにするのは、図6に示すような状況を想定したものである。図6においては、自車101の後方に後続車両104が存在している。また、対向車102が自車に向かって接近している状態である。また、自車101と対向車102との間では電波干渉が発生している状態である。このような場合、自車101のドライバが急ブレーキをかけたということは、自車101の進行方向に危険があると推測される(図6の場合は、ドライバが対向車102の接近に気付いた状況である)。その一方で、図6の場合、急ブレーキの影響で、後続車両の追突の危険性もある。そのため、図7に示すように、自車の進行方向のみ電波の送信をオフとし、後方の電波送信は有効な状態としておく。これにより、対向車102との間の電波干渉を解消して、車両前方にかかる危険の回避等を図ると共に、後続車両104については車載レーダでその存在を検知し、追突の恐れがある場合は適宜自車101のPCSを作動させることで、車両後方にかかる危険の回避等を図るものである。
【0036】
図4に戻り、ステップS4の処理の次に、ECU11は、受信アンテナ13aからの出力に基づいて、電波の送信停止後、所定時間内に他の車両の車載レーダ装置からの送信波を受信したか否かを判定する(ステップS5)。当該処理は、図8に示すような、車載レーダ装置を搭載していない対向車102(他の車両)の存在を想定している。つまり、図8において、対向車102の存在に気付き、自車101のドライバが急ブレーキをかけたとき、上記ステップS4の処理によって、一旦車両前方への電波の送信はオフにされるが(図8の状態)、対向車102は車載レーダ装置を搭載していないため、そもそも電波干渉は起こっていない状態である。このような場合は、図9に示すように、自車101の前方への電波の送信を再開して、自車101のPCS等を動作させることを図ったものである。換言すれば、対向車102が車載レーダ装置を有していれば、対向車102の車載レーダ装置によって危険を回避し、対向車102が車載レーダ装置を有していないときは、自車の車載レーダ装置によって危険を回避しようとするものである。
【0037】
図4に戻り、ステップS5で他の車両からの電波が受信したと判定されたときは(ステップS5でYES)、ECU11は、ブレーキペダルが離されたか否かをブレーキ16からの出力に基づいて判定する(ステップS6)。当該判定の結果、ブレーキペダルが離されていなければ(ステップS6でNO)、危険が近づいている状態と考えられる。そのため、ECU11は、上記ステップS5に戻り、処理を繰り返す。一方、ブレーキペダルが離されていれば(ステップS6でYES)、危険は回避したと考えられるため、ECU11は、送信アンテナ12aからの電波の送信を再開する(ステップS7)。
【0038】
一方、上記ステップS5で他の車両からの電波が受信したと判定されなかったときは(ステップS5でNO)、車載レーダ装置を搭載していない車両が近づいている状況と考えられるため、ECU11は上記ステップS7の処理に進み、送信アンテナ12aからの電波の送信を再開する。その結果、自車101のPCS等を作動させ、危険の回避等を図ることが可能となる。以上で、本実施形態にかかる電波干渉防止処理は終了する。
【0039】
このように、本実施形態では、車載レーダ装置同士で電波干渉が発生しているような状況において、一方の車両のドライバがブレーキを踏んだときのような、ドライバが危険を認知したと考えられるときに当該ドライバの車両の車載レーダ装置の電波の送信をオフにする。これにより、車載レーダ装置同士での電波干渉が発生することを防ぐことができる。その結果、他方の車両の車載レーダ装置を正常に動作させることで他方の車両側の危険回避のためのシステム等を作動させ、結果的に危険を回避することが可能となる。また、ブレーキの踏み込みを判定するという簡易な処理ですむため、電波干渉を回避するための複雑な処理(電波の送信タイミングの変更や位相変調処理等)を行うことでECUへの処理負荷が高くなることを防ぐことができ、危険発生時における迅速な危険回避処理が可能となる。
【0040】
なお、上述の実施形態では、ドライバが危険を認知したことの例としてブレーキをかけた場合で説明したが、これに限らず、例えばドライバの生理情報(瞳孔の開き具合や脈拍等)の変化を監視するようにし、所定の変化が検出されたときにドライバが危険を認知したと判定するようにしてもよい。
【産業上の利用可能性】
【0041】
本発明にかかる車載レーダ装置および電波干渉防止プログラムは、危険が発生する可能性が高い状況において車載レーダ装置間に発生する電波干渉を防止することができ、各種車載レーダ装置やこれを搭載する車両等に有用である。
【図面の簡単な説明】
【0042】
【図1】本発明の実施形態に係る車載レーダ装置の一例を示すブロック図
【図2】本実施形態にかかる電波干渉防止処理の概要を説明するための図
【図3】本実施形態にかかる電波干渉防止処理の概要を説明するための図
【図4】本実施形態にかかる電波干渉防止処理の詳細を示すフローチャート
【図5】図4のステップS3の処理を補足説明するための図
【図6】図4のステップS4の処理を補足説明するための図
【図7】図4のステップS4の処理を補足説明するための図
【図8】図4のステップS5の処理を補足説明するための図
【図9】図4のステップS5の処理を補足説明するための図
【符号の説明】
【0043】
10 車載レーダ装置
11 ECU
12 送信アンテナ
13 受信アンテナ
14 NVRAM
15 RAM
16 ブレーキ
17 加速度センサ
【特許請求の範囲】
【請求項1】
電波を対象物に向けて送信する送信手段と、
前記送信手段が送信した電波が前記対象物で反射された反射電波を受信するための受信手段と、
自車両運転者が危険を認知したことを判定するための危険認知判定手段と、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、前記送信手段からの電波の送信を停止する電波送信停止手段とを備えた、車載レーダ装置。
【請求項2】
前記車載レーダ装置は、ブレーキ操作が行われたか否かを判定するブレーキ操作判定手段を更に備え、
前記危険認知判定手段は、前記ブレーキ操作が行われたと判定されたときに、自車両運転者が危険を認知したと判定する、請求項1に記載の車載レーダ装置。
【請求項3】
前記車載レーダ装置は、
自車両のブレーキペダルの踏み込み量を検出するための踏み込み量検出手段と、
所定の加速度センサに基づいて自車両に加わった加速度を検出する加速度検出手段とを更に備え、
前記ブレーキ操作判定手段は、自車両のブレーキペダルの踏み込み量、ブレーキ油圧、および前記加速度の少なくとも一つ以上に基づいて前記ブレーキ操作が行われたか否かを判定する、請求項2に記載の車載レーダ装置。
【請求項4】
前記車載レーダ装置は、
前記電波送信停止手段によって電波の送信が停止された後、所定時間内に他の車両の車載レーダ装置からの電波を前記受信手段が受信したか否かを判定する停止後受信判定手段と、
前記停止後受信判定手段が、前記所定時間内に他の車両からの電波を受信しなかったと判定したときは、前記送信手段に電波の送信を再開させる送信再開手段とを更に備える、請求項1または請求項2に記載の車載レーダ装置。
【請求項5】
前記車載レーダ装置は、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、自車量の進行方向に障害物が存在するか否かを検出するための進行方向障害物検出手段を更に備え、
前記電波送信停止手段は、前記自車両運転者が危険を認知したと前記危険認知判定手段が判定し、かつ、車両の進行方向に障害物が存在しないことを前記進行方向障害物検出手段が検出したときに、前記電波の送信を停止する、請求項1に記載の車載レーダ装置。
【請求項6】
前記車載レーダ装置は、自車両の進行方向を少なくとも含んだ自車両の周囲の異なる方向へそれぞれ電波を送信する複数の前記送信手段および当該複数の送信手段に対応する複数の受信手段を備えており、
前記電波送信停止手段は、前記複数の送信手段のうち、自車両の進行方向にかかる送信手段からの電波の送信のみを停止する、請求項1または請求項2に記載の車載レーダ装置。
【請求項7】
電波を対象物に向けて送信する送信手段と、当該送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段とを備える車載レーダ装置のコンピュータに実行させるための電波干渉防止プログラムであって、
前記コンピュータを、
自車両運転者が危険を認知したことを判定するための危険認知判定手段と、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、前記送信手段からの電波の送信を停止する電波送信停止手段として機能させる、電波干渉防止プログラム。
【請求項1】
電波を対象物に向けて送信する送信手段と、
前記送信手段が送信した電波が前記対象物で反射された反射電波を受信するための受信手段と、
自車両運転者が危険を認知したことを判定するための危険認知判定手段と、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、前記送信手段からの電波の送信を停止する電波送信停止手段とを備えた、車載レーダ装置。
【請求項2】
前記車載レーダ装置は、ブレーキ操作が行われたか否かを判定するブレーキ操作判定手段を更に備え、
前記危険認知判定手段は、前記ブレーキ操作が行われたと判定されたときに、自車両運転者が危険を認知したと判定する、請求項1に記載の車載レーダ装置。
【請求項3】
前記車載レーダ装置は、
自車両のブレーキペダルの踏み込み量を検出するための踏み込み量検出手段と、
所定の加速度センサに基づいて自車両に加わった加速度を検出する加速度検出手段とを更に備え、
前記ブレーキ操作判定手段は、自車両のブレーキペダルの踏み込み量、ブレーキ油圧、および前記加速度の少なくとも一つ以上に基づいて前記ブレーキ操作が行われたか否かを判定する、請求項2に記載の車載レーダ装置。
【請求項4】
前記車載レーダ装置は、
前記電波送信停止手段によって電波の送信が停止された後、所定時間内に他の車両の車載レーダ装置からの電波を前記受信手段が受信したか否かを判定する停止後受信判定手段と、
前記停止後受信判定手段が、前記所定時間内に他の車両からの電波を受信しなかったと判定したときは、前記送信手段に電波の送信を再開させる送信再開手段とを更に備える、請求項1または請求項2に記載の車載レーダ装置。
【請求項5】
前記車載レーダ装置は、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、自車量の進行方向に障害物が存在するか否かを検出するための進行方向障害物検出手段を更に備え、
前記電波送信停止手段は、前記自車両運転者が危険を認知したと前記危険認知判定手段が判定し、かつ、車両の進行方向に障害物が存在しないことを前記進行方向障害物検出手段が検出したときに、前記電波の送信を停止する、請求項1に記載の車載レーダ装置。
【請求項6】
前記車載レーダ装置は、自車両の進行方向を少なくとも含んだ自車両の周囲の異なる方向へそれぞれ電波を送信する複数の前記送信手段および当該複数の送信手段に対応する複数の受信手段を備えており、
前記電波送信停止手段は、前記複数の送信手段のうち、自車両の進行方向にかかる送信手段からの電波の送信のみを停止する、請求項1または請求項2に記載の車載レーダ装置。
【請求項7】
電波を対象物に向けて送信する送信手段と、当該送信手段が送信した電波が対象物で反射された反射電波を受信するための受信手段とを備える車載レーダ装置のコンピュータに実行させるための電波干渉防止プログラムであって、
前記コンピュータを、
自車両運転者が危険を認知したことを判定するための危険認知判定手段と、
前記自車両運転者が危険を認知したと前記危険認知判定手段が判定したとき、前記送信手段からの電波の送信を停止する電波送信停止手段として機能させる、電波干渉防止プログラム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−8136(P2010−8136A)
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願番号】特願2008−165618(P2008−165618)
【出願日】平成20年6月25日(2008.6.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月14日(2010.1.14)
【国際特許分類】
【出願日】平成20年6月25日(2008.6.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]