
車載制御装置
【課題】CAN通信をするCANコントローラを備えた車載制御装置において、リプログラミングや検査などをするための他装置との間で、簡易かつ効率的に通信をできるようにすること。
【解決手段】車載制御装置10にCAN通信回路を実装しないで、CAN通信回路を外部より接続可能なコネクタ70を設ける。これにより、そのコネクタ70にCAN通信回路30を外部より接続することで、リプログラミングや検査をするための他装置80と車載制御装置10との間でCAN通信が可能となる。よって、車載制御装置10のリプログラミングや検査をCAN通信によって効率的に行うことができる。そして、車載制御装置10にCAN通信回路を実装しなくてもよいので、車載制御装置10の構成を簡単にできる。
【解決手段】車載制御装置10にCAN通信回路を実装しないで、CAN通信回路を外部より接続可能なコネクタ70を設ける。これにより、そのコネクタ70にCAN通信回路30を外部より接続することで、リプログラミングや検査をするための他装置80と車載制御装置10との間でCAN通信が可能となる。よって、車載制御装置10のリプログラミングや検査をCAN通信によって効率的に行うことができる。そして、車載制御装置10にCAN通信回路を実装しなくてもよいので、車載制御装置10の構成を簡単にできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置に関する。
【背景技術】
【0002】
自動車のメータを制御するメータ回路等の車載制御装置においては、その開発段階で制御ソフトを書き換えるリプログラミングや、出荷段階で所望の動作をするか等の検査を行うことがある。このリプログラミングや検査は、リプログラミング装置や検査設備といった外部の他装置を用いて行われる。そして、それら車載制御装置と他装置とがCAN(Control Area Network)プロトコルに則ったCAN通信をするCANコントローラを備えている場合には、車載制御装置と他装置との間でCAN通信がなされることにより、リプログラミングや検査が行われる(例えば、特許文献1参照)。
【0003】
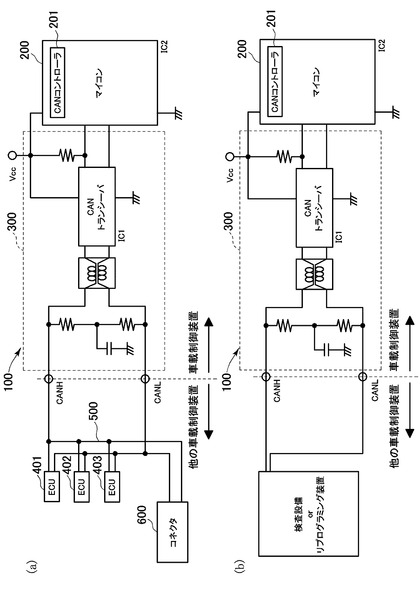
ところで、CANコントローラを備えている場合であっても、他装置との間でCAN通信を行うには、他装置から送信された信号をCANコントローラが認識できる形式に変換したり、CANコントローラが出力した信号を他装置側に伝送できる形式に変換したりするCAN通信回路を実装する必要がある。図6は、従来の車載制御装置100の構成とこれに接続する他装置側の構成を示した図である。図6(a)では、リプログラミングや検査がなされる車載制御装置100(例えばメータ回路)と他の車載制御装置401〜403(例えばエンジンECUなど)が通信ライン500に接続された状態を示している。また、通信ライン500には、外部の他装置が接続可能なコネクタ600が設けられている。車載制御装置100には、リプログラミングや検査を行うために、CANコントローラ201を備えたマイコン200に加え、そのマイコン200と他装置との間でCAN通信をするためのCAN通信回路300が実装されている。この車載制御装置100に対して、リプログラミングや検査を行う際には、コネクタ600にリプログラミング装置や検査設備といった他装置を接続する。そして、車載制御装置100と他装置との間でCAN通信を行うことにより、リプログラミングや検査がなされる。なお、図6(b)に示すように、車載制御装置100にリプログラミング装置や検査設備を直接接続して、リプログラミングや検査がなされることも考えられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−172199号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の車載制御装置では、他装置とCAN通信をするためにCAN通信回路を実装する必要があり、構成が複雑になる。しかしながら、車両に搭載される他の車載制御装置との間でCAN通信を行わない場合には、リプログラミングや検査のためだけにCAN通信回路を実装するのはコストアップするなどの問題がある。仮に、CAN通信回路を実装しないで、CAN通信以外の他の通信プロトコル(例えばUART通信)の通信を利用して、リプログラミングや検査を行うことも可能であるが、通信速度等の観点から効率的にリプログラミングや検査を行うことができない。
【0006】
本発明は上記問題点に鑑みてなされたものであり、CAN通信をするCANコントローラを備えた車載制御装置において、リプログラミングや検査などをするための他装置との間で、簡易かつ効率的に通信をできるようにすることを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置において、
他装置との間でCAN通信をするためのCAN通信回路を外部より接続可能な接続部を備えることを特徴とする。
【0008】
これによれば、CAN通信回路を外部より接続可能な接続部を備えているので、その接続部にCAN通信回路を外部より接続することで、リプログラミングや検査をCAN通信によって効率的に行うことができる。そして、必要に応じてCAN通信回路を接続部に接続すればよく、車載制御装置内にCAN通信回路を実装しなくてもよいので、車載制御装置の構成を簡単にできる。
【0009】
また、その車載制御装置は、他の車載制御装置との間でCAN通信を行わないものである。このように、他の車載制御装置との間でCAN通信を行わない車載制御装置に本発明を適用するのが好ましい。
【0010】
また、前記接続部は、コネクタとすることができる。これにより、CAN通信回路を容易に車載制御装置に接続できる。
【0011】
また、前記接続部は、前記車載制御装置のプリント基板に形成されたランドとしてもよい。これにより、そのランドにCAN通信回路の通信ラインを接続することで、CAN通信回路を車載制御装置に接続できる。
【図面の簡単な説明】
【0012】
【図1】車載制御装置10の概略構成を示したブロック図である。
【図2】車載制御装置10の外観正面図(a)、外観背面図(b)である。
【図3】車載制御装置10に接続される他装置側の構成を示した図である。
【図4】車載制御装置10と他装置側とをコネクタ70を介して接続した状態を示した図である。
【図5】車載制御装置10と他装置側とをランド90を介して接続した状態を示した図である。
【図6】従来の車載制御装置100の構成とこれに接続する他装置側の構成を示した図である。
【発明を実施するための形態】
【0013】
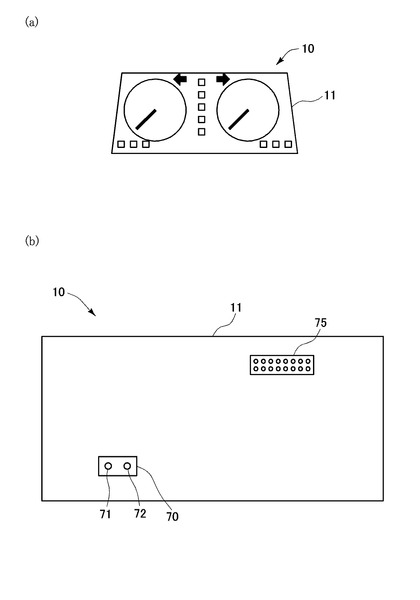
以下、本発明の車載制御装置の実施形態について説明する。図1は、本実施形態の車載制御装置10の概略構成を示したブロック図であり、図2はその車載制御装置10の外観正面図(a)、外観背面図(b)である。本実施形態の車載制御装置10は、自動車のインストルメントパネルに設けられる各種メータを制御するメータ回路が実装されたメータ回路ASSYである。その車載制御装置10は、筐体11(図2参照)の内部に図1の構成(メータ回路)が実装されており、また図2(a)に示すように、筐体11の正面側にはエンジン回転数メータ等の各種メータや各種LEDが外部から視認できるように配置されている。
【0014】
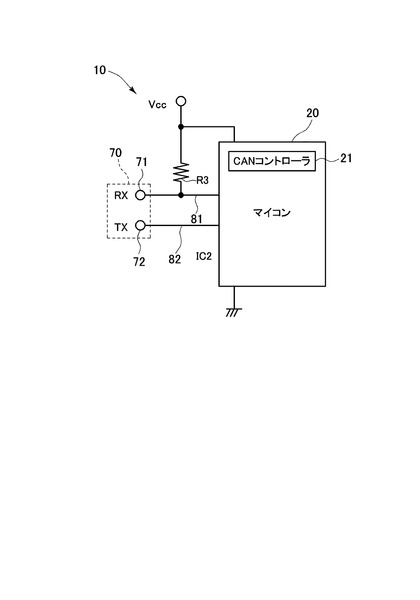
上述したように、車載制御装置10の筐体11内において、図1のメータ回路がプリント基板(図示外)に実装されている。図1に示すように、車載制御装置10は、マイコン20を備えている。そのマイコン20は、通常のコンピュータとしてCPU、ROM、RAMから構成されており、CPUがROM、RAMを利用しつつ各種処理を実行する。具体的には、例えば、車速信号やエンジン回転数信号を外部から取得して、その信号に応じた位置になるように、速度メータやエンジン回転数メータの指針を作動させる。また、例えば、状況に応じて各種LEDの点灯を制御する。
【0015】
また、マイコン20は、CANプロトコルに則ったCAN通信をするCANコントローラ21を備えている。そのCANコントローラ21は、CANプロトコルに則って他装置との間でCAN通信をするためのものであり、信号を入出力するためのRXポート(図示外)及びTXポート(図示外)が設けられている。RXポートは、他装置側から送信されてきた信号をCANコントローラ21内に入力するためのポートである。また、TXポートは、CANコントローラ21から他装置側に信号を出力するためのポートである。
【0016】
このように、車載制御装置10は、CAN通信をするCANコントローラを備えているものであるが、上述したように、他装置とCAN通信をするためにはCAN通信回路が必要となる。しかしながら、CAN通信回路を実装すると構成が複雑になるために、本発明の車載制御装置10ではCAN通信回路を実装しないで、外部より接続できるように構成されている。具体的には、図1に示すように、CAN通信回路を外部より接続可能な接続部としてのコネクタ70が設けられている。そのコネクタ70は、CANコントローラ21のRXポートに対応した入力用接続点71及びTXポートに対応した出力用接続点72を有している。そして、コネクタ70(接続点71、72)とマイコン20(CANコントローラ21)との間は、信号ライン81、82で接続されている。すなわち、外部からの入力信号は、RXポートに対応した入力用接続点71に入力されて、信号ライン81を介してCANコントローラ21のRXポートに入力されるようになっている。また、CANコントローラ21のTXポートから出力される出力信号は、信号ライン82を介して出力用接続点72から外部に出力されるようになっている。
【0017】
そして、このコネクタ70は、図2(b)に示すように、車載制御装置10の筐体11の背面側に設けられており、外部からCAN通信回路を接続できるようになっている。なお、車載制御装置10には、コネクタ70の他に、別の用途にも用いることができる車両用コネクタ75(図2(b)参照)が設けられている。そして、仮にその車両用コネクタ75が用いられてなく空いている場合には、その車両用コネクタ75を、CAN通信回路を接続するためのコネクタとしてもよい。この場合、図2(b)に示すように、車両用コネクタ75の端子が多数ある場合には、そのうちの2つを、CAN通信回路を接続するための端子に割り当てるようにすればよい。このように既存の車両用コネクタ75を用いることにより、より一層、車載制御装置10の構造が簡単になる。
【0018】
また、図1に示すように、入力信号のための信号ライン81には、プルアップ抵抗R3が接続されており、信号ライン81の電位レベルが不定になるのを防止している。
【0019】
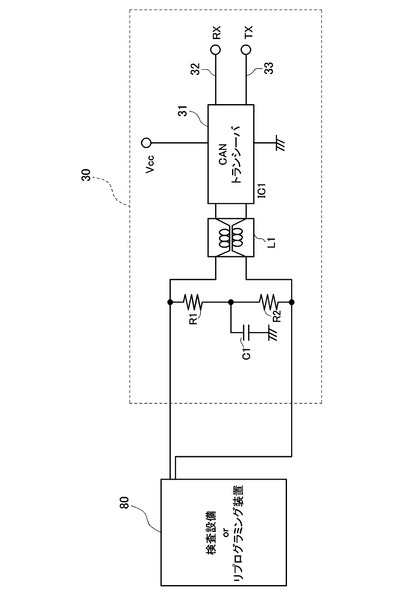
このように、車載制御装置10では、コネクタ70を設けて、外部よりCAN通信回路を接続するようにしているので、リプログラミングや検査をする際には、従来車載制御装置側に設けていたCAN通信回路が、外部の他装置側に設けられることになる。図3は、外部の他装置側の構成例を示した図である。図3に示すように、他装置側は、リプログラミングをするリプログラミング装置80や検査をする検査設備80(以下、他装置80とも言う)に加え、従来車載制御装置側に設けていたCAN通信回路30が他装置80に接続されて構成される。
【0020】
他装置80としてのリプログラミング装置80は、車載制御装置10のROM(図示外)に記憶されているプログラム(制御ソフト)を書き換えるための装置である。また、他装置80としての検査設備80は、車載制御装置10が所望する動作をするかについて、出荷時等に検査するための設備である。具体的には、例えば、車載制御装置10としてのメータ回路ASSYが、車速信号に応じた指針となるようにメータが作動するかの検査や、各種LEDが状況に応じて適切に点灯するかの検査をするための装置であり、検査の際には、車載制御装置10側に車速信号等の信号を送信するものである。そして、リプログラミング装置80や検査設備80は、CAN通信をする機能(CANコントローラやCAN通信回路)を有しており、CAN通信によって、リプログラミングや検査を実行する。
【0021】
CAN通信回路30は、車載制御装置10と他装置80との間で、CAN通信を可能にするための回路であり、図1に示すCANトランシーバ31を主要部として構成された回路である。そのCANトランシーバ31は、他装置80から送信される差動電圧信号が入力されて、CANコントローラが認識できるデジタル信号に変換する。そして、CANトランシーバ31には、CANコントローラのRXポートに対応した信号ライン32が接続されており、CANトランシーバ31は、変換したデジタル信号をその信号ライン32に出力する。
【0022】
また、CANトランシーバ31には、CANコントローラから出力されるデジタル信号を流すための信号ライン33が接続されている。そして、CANトランシーバ31は、その信号ライン33を介してCANコントローラからのデジタル信号を、他装置80に伝送できる形式の差動電圧信号に変換して出力する。
【0023】
また、CAN通信回路30は、CANトランシーバ31に入出力される差動電圧信号が流れるラインに、そのラインのインピーダンス調整用の終端抵抗R1、R2や、そのラインの電圧の安定用のコンデンサC1や、耐ノイズ性を強化するためのインダクタL1が設けられる。それら回路素子R1、R2、C1、L1は、必要に応じて、その定数、実装/未実装が決定される。なお、図3に示すCAN通信回路30は一例である。
【0024】
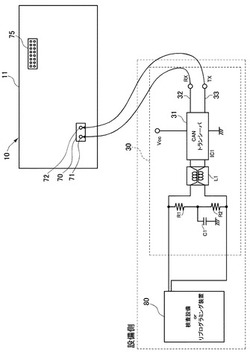
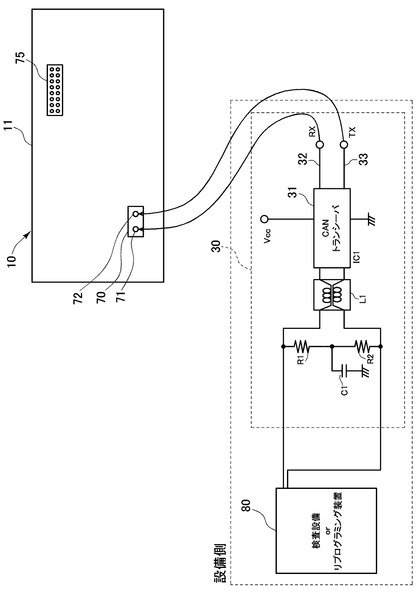
以上のようにして構成された車載制御装置10、他装置側(他装置80及びCAN通信回路30)を用いて、リプログラミングや検査を実行するには、図4に示すように、CAN通信回路30のRXポートに対応した信号ライン32をコネクタ70のRXポートに対応した入力用接続部71に接続し、CAN通信回路30のTXポートに対応した信号ライン33をコネクタ70のTXポートに対応した出力用接続部72に接続することになる。この際、CAN通信回路30の信号ライン32、33の先端を、車載制御装置10に設けられたコネクタ70に対応するコネクタとしておけば、それらを簡易に接続することができる。これにより、車載制御装置10と他装置80との間でCAN通信が可能になるので、車載制御装置10のリプログラミングや検査を実行することができる。
【0025】
以上説明したように、本発明の車載制御装置10では、CAN通信回路を実装しないで、CAN通信回路を外部より接続可能なコネクタ70を備えているので、リプログラミングや検査を可能としつつ車載制御装置10の構成を簡単にすることができる。
【0026】
なお、本発明の車載制御装置は上記実施形態に限定されるわけではなく、特許請求の範囲を逸脱しない限りにおいて変形することができる。例えば、上記実施形態では、CAN通信回路を外部より接続可能な接続部として、コネクタ70を設けていたが、図5に示すように、車載制御装置10のプリント基板12に直接、接続部としてランド90を設けてもよい。この場合、CANコントローラ21のRXポートに接続する入力用ランド91とTXポートに接続する出力用ランド92を設けるようにする。これによれば、CAN通信回路30の信号ライン32を入力用ランド91に、信号ライン33を出力用ランド92に接続することにより、車載制御装置10のマイコン20(CANコントローラ21)と他装置80との間でCAN通信をすることができる。すなわち、車載制御装置10のリプログラミングや検査を実行することができる。このように、接続部としてのランド90は、車載制御装置10がASSY状態ではなく、プリント基板12に直接CAN通信回路を接続する場合に好適である。
【0027】
また、上記実施形態では、車載制御装置10としてメータ回路ASSYを例にとって説明したが、エンジンを制御する車載制御装置等、リプログラミングや検査される他の車載制御装置に適用してもよい。また、上記実施形態では、リプログラミングや検査を実行するためにコネクタ70やランド90を設けていたが、リプログラミングや検査以外に、他装置との間でCAN通信をすることがある場合には、そのためにコネクタ70やランド90を用いてもよい。
【符号の説明】
【0028】
10 車載制御装置
20 マイコン
21 CANコントローラ
30 CAN通信回路
70 コネクタ
71 入力用接続部
72 出力用接続部
80 他装置
90 ランド
91 入力用ランド
92 出力用ランド
【技術分野】
【0001】
本発明は、CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置に関する。
【背景技術】
【0002】
自動車のメータを制御するメータ回路等の車載制御装置においては、その開発段階で制御ソフトを書き換えるリプログラミングや、出荷段階で所望の動作をするか等の検査を行うことがある。このリプログラミングや検査は、リプログラミング装置や検査設備といった外部の他装置を用いて行われる。そして、それら車載制御装置と他装置とがCAN(Control Area Network)プロトコルに則ったCAN通信をするCANコントローラを備えている場合には、車載制御装置と他装置との間でCAN通信がなされることにより、リプログラミングや検査が行われる(例えば、特許文献1参照)。
【0003】
ところで、CANコントローラを備えている場合であっても、他装置との間でCAN通信を行うには、他装置から送信された信号をCANコントローラが認識できる形式に変換したり、CANコントローラが出力した信号を他装置側に伝送できる形式に変換したりするCAN通信回路を実装する必要がある。図6は、従来の車載制御装置100の構成とこれに接続する他装置側の構成を示した図である。図6(a)では、リプログラミングや検査がなされる車載制御装置100(例えばメータ回路)と他の車載制御装置401〜403(例えばエンジンECUなど)が通信ライン500に接続された状態を示している。また、通信ライン500には、外部の他装置が接続可能なコネクタ600が設けられている。車載制御装置100には、リプログラミングや検査を行うために、CANコントローラ201を備えたマイコン200に加え、そのマイコン200と他装置との間でCAN通信をするためのCAN通信回路300が実装されている。この車載制御装置100に対して、リプログラミングや検査を行う際には、コネクタ600にリプログラミング装置や検査設備といった他装置を接続する。そして、車載制御装置100と他装置との間でCAN通信を行うことにより、リプログラミングや検査がなされる。なお、図6(b)に示すように、車載制御装置100にリプログラミング装置や検査設備を直接接続して、リプログラミングや検査がなされることも考えられる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−172199号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の車載制御装置では、他装置とCAN通信をするためにCAN通信回路を実装する必要があり、構成が複雑になる。しかしながら、車両に搭載される他の車載制御装置との間でCAN通信を行わない場合には、リプログラミングや検査のためだけにCAN通信回路を実装するのはコストアップするなどの問題がある。仮に、CAN通信回路を実装しないで、CAN通信以外の他の通信プロトコル(例えばUART通信)の通信を利用して、リプログラミングや検査を行うことも可能であるが、通信速度等の観点から効率的にリプログラミングや検査を行うことができない。
【0006】
本発明は上記問題点に鑑みてなされたものであり、CAN通信をするCANコントローラを備えた車載制御装置において、リプログラミングや検査などをするための他装置との間で、簡易かつ効率的に通信をできるようにすることを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は、CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置において、
他装置との間でCAN通信をするためのCAN通信回路を外部より接続可能な接続部を備えることを特徴とする。
【0008】
これによれば、CAN通信回路を外部より接続可能な接続部を備えているので、その接続部にCAN通信回路を外部より接続することで、リプログラミングや検査をCAN通信によって効率的に行うことができる。そして、必要に応じてCAN通信回路を接続部に接続すればよく、車載制御装置内にCAN通信回路を実装しなくてもよいので、車載制御装置の構成を簡単にできる。
【0009】
また、その車載制御装置は、他の車載制御装置との間でCAN通信を行わないものである。このように、他の車載制御装置との間でCAN通信を行わない車載制御装置に本発明を適用するのが好ましい。
【0010】
また、前記接続部は、コネクタとすることができる。これにより、CAN通信回路を容易に車載制御装置に接続できる。
【0011】
また、前記接続部は、前記車載制御装置のプリント基板に形成されたランドとしてもよい。これにより、そのランドにCAN通信回路の通信ラインを接続することで、CAN通信回路を車載制御装置に接続できる。
【図面の簡単な説明】
【0012】
【図1】車載制御装置10の概略構成を示したブロック図である。
【図2】車載制御装置10の外観正面図(a)、外観背面図(b)である。
【図3】車載制御装置10に接続される他装置側の構成を示した図である。
【図4】車載制御装置10と他装置側とをコネクタ70を介して接続した状態を示した図である。
【図5】車載制御装置10と他装置側とをランド90を介して接続した状態を示した図である。
【図6】従来の車載制御装置100の構成とこれに接続する他装置側の構成を示した図である。
【発明を実施するための形態】
【0013】
以下、本発明の車載制御装置の実施形態について説明する。図1は、本実施形態の車載制御装置10の概略構成を示したブロック図であり、図2はその車載制御装置10の外観正面図(a)、外観背面図(b)である。本実施形態の車載制御装置10は、自動車のインストルメントパネルに設けられる各種メータを制御するメータ回路が実装されたメータ回路ASSYである。その車載制御装置10は、筐体11(図2参照)の内部に図1の構成(メータ回路)が実装されており、また図2(a)に示すように、筐体11の正面側にはエンジン回転数メータ等の各種メータや各種LEDが外部から視認できるように配置されている。
【0014】
上述したように、車載制御装置10の筐体11内において、図1のメータ回路がプリント基板(図示外)に実装されている。図1に示すように、車載制御装置10は、マイコン20を備えている。そのマイコン20は、通常のコンピュータとしてCPU、ROM、RAMから構成されており、CPUがROM、RAMを利用しつつ各種処理を実行する。具体的には、例えば、車速信号やエンジン回転数信号を外部から取得して、その信号に応じた位置になるように、速度メータやエンジン回転数メータの指針を作動させる。また、例えば、状況に応じて各種LEDの点灯を制御する。
【0015】
また、マイコン20は、CANプロトコルに則ったCAN通信をするCANコントローラ21を備えている。そのCANコントローラ21は、CANプロトコルに則って他装置との間でCAN通信をするためのものであり、信号を入出力するためのRXポート(図示外)及びTXポート(図示外)が設けられている。RXポートは、他装置側から送信されてきた信号をCANコントローラ21内に入力するためのポートである。また、TXポートは、CANコントローラ21から他装置側に信号を出力するためのポートである。
【0016】
このように、車載制御装置10は、CAN通信をするCANコントローラを備えているものであるが、上述したように、他装置とCAN通信をするためにはCAN通信回路が必要となる。しかしながら、CAN通信回路を実装すると構成が複雑になるために、本発明の車載制御装置10ではCAN通信回路を実装しないで、外部より接続できるように構成されている。具体的には、図1に示すように、CAN通信回路を外部より接続可能な接続部としてのコネクタ70が設けられている。そのコネクタ70は、CANコントローラ21のRXポートに対応した入力用接続点71及びTXポートに対応した出力用接続点72を有している。そして、コネクタ70(接続点71、72)とマイコン20(CANコントローラ21)との間は、信号ライン81、82で接続されている。すなわち、外部からの入力信号は、RXポートに対応した入力用接続点71に入力されて、信号ライン81を介してCANコントローラ21のRXポートに入力されるようになっている。また、CANコントローラ21のTXポートから出力される出力信号は、信号ライン82を介して出力用接続点72から外部に出力されるようになっている。
【0017】
そして、このコネクタ70は、図2(b)に示すように、車載制御装置10の筐体11の背面側に設けられており、外部からCAN通信回路を接続できるようになっている。なお、車載制御装置10には、コネクタ70の他に、別の用途にも用いることができる車両用コネクタ75(図2(b)参照)が設けられている。そして、仮にその車両用コネクタ75が用いられてなく空いている場合には、その車両用コネクタ75を、CAN通信回路を接続するためのコネクタとしてもよい。この場合、図2(b)に示すように、車両用コネクタ75の端子が多数ある場合には、そのうちの2つを、CAN通信回路を接続するための端子に割り当てるようにすればよい。このように既存の車両用コネクタ75を用いることにより、より一層、車載制御装置10の構造が簡単になる。
【0018】
また、図1に示すように、入力信号のための信号ライン81には、プルアップ抵抗R3が接続されており、信号ライン81の電位レベルが不定になるのを防止している。
【0019】
このように、車載制御装置10では、コネクタ70を設けて、外部よりCAN通信回路を接続するようにしているので、リプログラミングや検査をする際には、従来車載制御装置側に設けていたCAN通信回路が、外部の他装置側に設けられることになる。図3は、外部の他装置側の構成例を示した図である。図3に示すように、他装置側は、リプログラミングをするリプログラミング装置80や検査をする検査設備80(以下、他装置80とも言う)に加え、従来車載制御装置側に設けていたCAN通信回路30が他装置80に接続されて構成される。
【0020】
他装置80としてのリプログラミング装置80は、車載制御装置10のROM(図示外)に記憶されているプログラム(制御ソフト)を書き換えるための装置である。また、他装置80としての検査設備80は、車載制御装置10が所望する動作をするかについて、出荷時等に検査するための設備である。具体的には、例えば、車載制御装置10としてのメータ回路ASSYが、車速信号に応じた指針となるようにメータが作動するかの検査や、各種LEDが状況に応じて適切に点灯するかの検査をするための装置であり、検査の際には、車載制御装置10側に車速信号等の信号を送信するものである。そして、リプログラミング装置80や検査設備80は、CAN通信をする機能(CANコントローラやCAN通信回路)を有しており、CAN通信によって、リプログラミングや検査を実行する。
【0021】
CAN通信回路30は、車載制御装置10と他装置80との間で、CAN通信を可能にするための回路であり、図1に示すCANトランシーバ31を主要部として構成された回路である。そのCANトランシーバ31は、他装置80から送信される差動電圧信号が入力されて、CANコントローラが認識できるデジタル信号に変換する。そして、CANトランシーバ31には、CANコントローラのRXポートに対応した信号ライン32が接続されており、CANトランシーバ31は、変換したデジタル信号をその信号ライン32に出力する。
【0022】
また、CANトランシーバ31には、CANコントローラから出力されるデジタル信号を流すための信号ライン33が接続されている。そして、CANトランシーバ31は、その信号ライン33を介してCANコントローラからのデジタル信号を、他装置80に伝送できる形式の差動電圧信号に変換して出力する。
【0023】
また、CAN通信回路30は、CANトランシーバ31に入出力される差動電圧信号が流れるラインに、そのラインのインピーダンス調整用の終端抵抗R1、R2や、そのラインの電圧の安定用のコンデンサC1や、耐ノイズ性を強化するためのインダクタL1が設けられる。それら回路素子R1、R2、C1、L1は、必要に応じて、その定数、実装/未実装が決定される。なお、図3に示すCAN通信回路30は一例である。
【0024】
以上のようにして構成された車載制御装置10、他装置側(他装置80及びCAN通信回路30)を用いて、リプログラミングや検査を実行するには、図4に示すように、CAN通信回路30のRXポートに対応した信号ライン32をコネクタ70のRXポートに対応した入力用接続部71に接続し、CAN通信回路30のTXポートに対応した信号ライン33をコネクタ70のTXポートに対応した出力用接続部72に接続することになる。この際、CAN通信回路30の信号ライン32、33の先端を、車載制御装置10に設けられたコネクタ70に対応するコネクタとしておけば、それらを簡易に接続することができる。これにより、車載制御装置10と他装置80との間でCAN通信が可能になるので、車載制御装置10のリプログラミングや検査を実行することができる。
【0025】
以上説明したように、本発明の車載制御装置10では、CAN通信回路を実装しないで、CAN通信回路を外部より接続可能なコネクタ70を備えているので、リプログラミングや検査を可能としつつ車載制御装置10の構成を簡単にすることができる。
【0026】
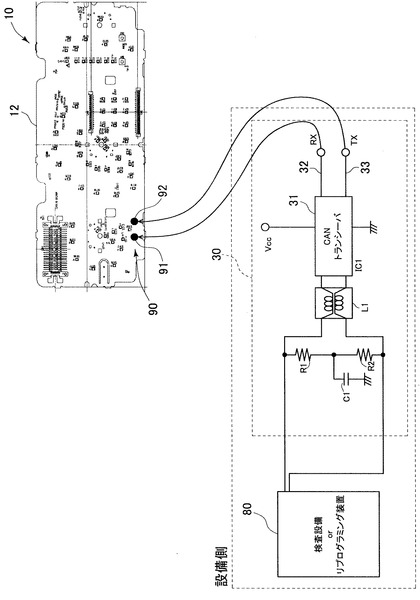
なお、本発明の車載制御装置は上記実施形態に限定されるわけではなく、特許請求の範囲を逸脱しない限りにおいて変形することができる。例えば、上記実施形態では、CAN通信回路を外部より接続可能な接続部として、コネクタ70を設けていたが、図5に示すように、車載制御装置10のプリント基板12に直接、接続部としてランド90を設けてもよい。この場合、CANコントローラ21のRXポートに接続する入力用ランド91とTXポートに接続する出力用ランド92を設けるようにする。これによれば、CAN通信回路30の信号ライン32を入力用ランド91に、信号ライン33を出力用ランド92に接続することにより、車載制御装置10のマイコン20(CANコントローラ21)と他装置80との間でCAN通信をすることができる。すなわち、車載制御装置10のリプログラミングや検査を実行することができる。このように、接続部としてのランド90は、車載制御装置10がASSY状態ではなく、プリント基板12に直接CAN通信回路を接続する場合に好適である。
【0027】
また、上記実施形態では、車載制御装置10としてメータ回路ASSYを例にとって説明したが、エンジンを制御する車載制御装置等、リプログラミングや検査される他の車載制御装置に適用してもよい。また、上記実施形態では、リプログラミングや検査を実行するためにコネクタ70やランド90を設けていたが、リプログラミングや検査以外に、他装置との間でCAN通信をすることがある場合には、そのためにコネクタ70やランド90を用いてもよい。
【符号の説明】
【0028】
10 車載制御装置
20 マイコン
21 CANコントローラ
30 CAN通信回路
70 コネクタ
71 入力用接続部
72 出力用接続部
80 他装置
90 ランド
91 入力用ランド
92 出力用ランド
【特許請求の範囲】
【請求項1】
CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置において、
他装置との間でCAN通信をするためのCAN通信回路を外部より接続可能な接続部を備えることを特徴とする車載制御装置。
【請求項2】
他の車載制御装置との間でCAN通信を行わないものであることを特徴とする請求項1に記載の車載制御装置。
【請求項3】
前記接続部は、コネクタであることを特徴とする請求項1又は2に記載の車載制御装置。
【請求項4】
前記接続部は、前記車載制御装置のプリント基板に形成されたランドであることを特徴とする請求項1又は2に記載の車載制御装置。
【請求項1】
CANプロトコルに則ったCAN通信をするCANコントローラを備えた車載制御装置において、
他装置との間でCAN通信をするためのCAN通信回路を外部より接続可能な接続部を備えることを特徴とする車載制御装置。
【請求項2】
他の車載制御装置との間でCAN通信を行わないものであることを特徴とする請求項1に記載の車載制御装置。
【請求項3】
前記接続部は、コネクタであることを特徴とする請求項1又は2に記載の車載制御装置。
【請求項4】
前記接続部は、前記車載制御装置のプリント基板に形成されたランドであることを特徴とする請求項1又は2に記載の車載制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−121545(P2011−121545A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−282820(P2009−282820)
【出願日】平成21年12月14日(2009.12.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月14日(2009.12.14)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]