
車載勾配推定装置、勾配推定方法
【課題】車両がブレーキング中であっても正しい勾配を推定できるようにする。
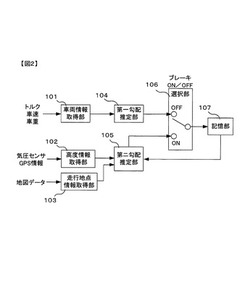
【解決手段】第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。選択部106は、自車両のブレーキがオフである場合は第一勾配推定部104を選択し、ブレーキがオンである場合は第二勾配推定部105を選択するようにスイッチを切り替える。
【解決手段】第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。選択部106は、自車両のブレーキがオフである場合は第一勾配推定部104を選択し、ブレーキがオンである場合は第二勾配推定部105を選択するようにスイッチを切り替える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行地点の勾配を推定する装置および方法に関する。
【背景技術】
【0002】
従来、車両の走行地点の勾配を推定し、その推定結果に基づいて車両の変速制御や駆動制御を行う技術が知られている。特許文献1には、エンジン回転数やスロットル開度などに基づいて出力軸トルクを推定し、推定した出力軸トルクから平地走行抵抗や加速抵抗の分を差し引いて勾配を推定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−201523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の方法では、ブレーキングによる車両の減速が考慮されていないため、ブレーキング中の出力軸トルクを正確に推定するのが困難である。したがって、車両のブレーキング中は正しい勾配が推定できない。
【課題を解決するための手段】
【0005】
本発明による車載勾配推定装置は、第一の推定方法により車両の走行地点の勾配を推定する第一勾配推定手段と、第一の推定方法とは異なる第二の推定方法により走行地点の勾配を推定する第二勾配推定手段と、車両のブレーキが運転者によって操作されたか否かを判定するブレーキ判定手段と、ブレーキ判定手段により車両のブレーキが操作されていないと判定されたときには第一勾配推定手段を選択し、ブレーキ判定手段により車両のブレーキが操作されたと判定されたときには第二勾配推定手段を選択する推定方法選択手段とを備え、選択手段により選択された第一勾配推定手段または第二勾配推定手段を用いて、走行地点の勾配を推定するものである。
本発明による勾配推定方法は、車両に搭載された情報端末により車両の走行地点の勾配を推定する方法であって、情報端末により、車両のブレーキが運転者によって操作されたか否かに応じて、第一の推定方法、または第一の推定方法とは異なる第二の推定方法のいずれか一方を選択し、選択された第一の推定方法または第二の推定方法を用いて、走行地点の勾配を推定するものである。
【発明の効果】
【0006】
本発明によれば、車両がブレーキング中であっても正しい勾配を推定できる。
【図面の簡単な説明】
【0007】
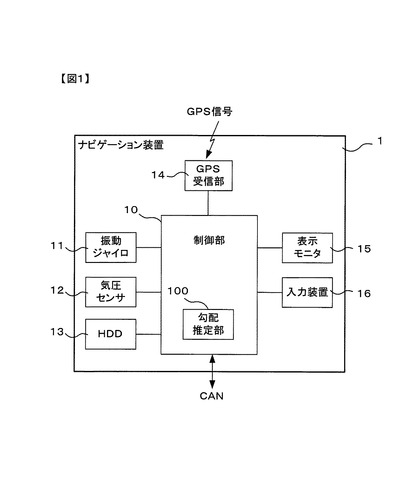
【図1】本発明の一実施形態による勾配推定方法を適用したナビゲーション装置の構成図である。
【図2】勾配推定部の機能ブロック図である。
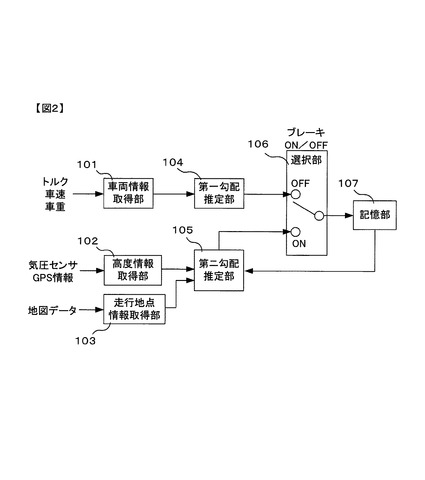
【図3】本実施形態による勾配推定処理のフローチャートである。
【図4】ブレーキ中勾配推定のフローチャートである。
【発明を実施するための形態】
【0008】
本発明の一実施の形態による勾配推定方法を適用したナビゲーション装置の構成を図1に示す。ナビゲーション装置1は、制御部10、振動ジャイロ11、気圧センサ12、ハードディスクドライブ(HDD)13、GPS(Global Positioning System)受信部14、表示モニタ15および入力装置16を備えている。
【0009】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD13に記録されている制御プログラムや地図データに基づいて、各種の処理を実行する。この制御部10により、自車両を目的地まで案内するための様々な処理が実行される。たとえば、目的地を設定する際の目的地の探索処理、設定された目的地までの推奨経路の探索処理、自車位置の検出処理、各種の画像表示処理、ルート案内時の音声出力処理などが実行される。
【0010】
制御部10は、CAN(Controller Area Network)と接続されており、CANを介して車両内の各部と通信を行うことができる。たとえば、車両のエンジン制御装置から出力される駆動トルク情報、ブレーキ制御装置から出力されるブレーキ情報、車速センサから出力される車速情報などが、CANを介した通信により制御部10へ入力される。また、制御部10において求められた走行地点の勾配情報などが、CANを介した通信により制御部10から外部へ出力される。
【0011】
なお、制御部10には、本発明による勾配推定方法を実行するための勾配推定部100が機能的に含まれている。勾配推定部100の詳細については、後で図2を用いて詳しく説明する。
【0012】
振動ジャイロ11は、自車両の角速度を検出するためのセンサである。この振動ジャイロ11によって検出された角速度に基づいて、自車両の進行方向が求められる。
【0013】
気圧センサ12は、自車両周囲の大気圧を計測するためのセンサである。この気圧センサ12によって検出された大気圧に基づいて、自車両が走行している地点の高度を算出することができる。気圧センサ12による検出結果は、気圧信号として制御部10へ出力される。
【0014】
HDD13は不揮発性の記録媒体であり、制御部10において上記のような処理を実行するための制御プログラムや地図データなどが記録されている。HDD13に記録されているデータは、必要に応じて制御部10の制御により読み出され、制御部10が実行する様々な処理や制御に利用される。
【0015】
HDD13に記録された地図データは、経路計算データと、道路データと、背景データとを含む。経路計算データは、目的地までの推奨経路を探索する際などに用いられるデータである。道路データは、道路の形状や種別などを表すデータである。なお、地図データにおいて各道路の最小単位はリンクと呼ばれている。すなわち、地図データにおいて各道路は複数のリンクにより構成される。背景データは、地図の背景を表すデータである。なお、地図の背景とは、地図上に存在する道路以外の様々な構成物である。たとえば、河川、鉄道、緑地帯、各種構造物などが背景データによって表される。
【0016】
なお、上記ではナビゲーション装置1において地図データがHDD13に記録されている例を説明したが、これらをHDD以外の記録媒体に記録することとしてもよい。たとえば、CD−ROMやDVD−ROM、メモリカードなどに記録された地図データを用いることができる。すなわち、本実施の形態によるナビゲーション装置では、どのような記録媒体を用いてこれらのデータを記憶してもよい。
【0017】
GPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、自車両の位置を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻に関する情報が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて、自車位置を制御部10において算出することができる。このGPS信号に基づく自車位置の算出結果と、振動ジャイロ11による進行方向の検出結果、および前述のCANを介した通信によって取得される車速情報に基づいて、所定時間ごとに自車位置が検出される。なお、GPS信号に基づいて自車両の高度を求めることもできる。
【0018】
表示モニタ15は、ナビゲーション装置1において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ15により、地図画面の表示などが行われる。表示モニタ15に表示される画面の内容は、制御部10が行う画面表示制御によって決定される。表示モニタ15は、たとえば自車両のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0019】
入力装置16は、ナビゲーション装置1を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、地図を任意の方向にスクロールしたりすることができる。この入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ15と一体化されたタッチパネルとしてもよい。
【0020】
ユーザが入力装置16を操作して目的地を設定すると、ナビゲーション装置1は、前述のようにして検出された自車位置を出発地として、前述の経路計算データに基づいて所定のアルゴリズムの演算によるルート探索処理を行う。このルート探索処理により、出発地から目的地まで至る推奨経路が探索されると、探索された推奨経路にしたがってルート案内が行われ、自車両が目的地まで誘導される。
【0021】
次に、制御部10における勾配推定部100の詳細について説明する。図2は、勾配推定部100の機能ブロック図である。勾配推定部100は、車両情報取得部101、高度情報取得部102、走行地点情報取得部103、第一勾配推定部104、第二勾配推定部105、選択部106および記憶部107の各機能ブロックを有している。
【0022】
車両情報取得部101は、勾配推定を行うために必要な車両情報を取得する。車両情報取得部101によって取得される車両情報には、自車両の駆動トルク(トルク)、走行速度(車速)、重量(車重)などが含まれる。トルクと車速の情報は、前述のように自車両のエンジン制御装置や車速センサからCANを介して所定時間ごとに取得することができる。一方、車重の情報は、自車両において予め設定された情報として取得することができる。あるいは、他の方法で車重の情報を取得してもよい。たとえば、走行中の自車両の挙動に基づいて車重を推測したり、道路上などに設置された車重計測装置から送信される計測信号を受信したりしてもよい。車両情報取得部101によって取得されたこれらの車両情報は、第一勾配推定部104へ出力される。
【0023】
高度情報取得部102は、自車両の走行地点の高度に関する高度情報として、気圧センサ12から出力される気圧信号とGPS受信部14から出力されるGPS信号とを取得する。これらの高度情報に基づいて、自車両の走行地点の高度が推定される。すなわち、気圧信号が表す大気圧と、GPS信号に基づいて算出されるGPS衛星からの距離とに基づいて、走行地点の高度を求めることができる。なお、気圧信号とGPS信号のいずれか一方のみを高度情報として取得してもよい。あるいは、これ以外の情報を高度情報として取得してもよい。たとえば、地図データにおいて各地点の高度を記録しておき、これに基づいて走行地点に対応する高度情報を取得してもよい。高度情報取得部102によって取得された高度情報は、第二勾配推定部105へ出力される。
【0024】
走行地点情報取得部103は、HDD13に記録されている地図データに基づいて、自車両の走行地点の様子を表す走行地点情報を取得する。たとえば、自車両が道路上を走行している場合は、そのときの走行地点すなわち自車位置を表す情報と共に、その道路の種類や形状などの情報が走行地点情報として取得される。また、自車両が道路から外れて何らかの施設内にいるような場合は、そのときの走行地点すなわち自車位置を表す情報と共に、その施設の種類や名称などに関する情報が走行地点情報として取得される。走行地点情報取得部103によって取得されたこれらの走行地点情報は、第二勾配推定部105へ出力される。
【0025】
第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。すなわち、車両情報に含まれる自車両のトルクおよび車重に基づいて自車両の加速度を推定し、その加速度に対する車速の変化から自車両の走行地点の勾配を推定する。このとき、道路の走行抵抗や車重などを考慮に入れることが好ましい。
【0026】
なお、車両情報取得部101において、自車両におけるブレーキングの強さは車両情報として取得されない。したがって、第一勾配推定部104によって行われる車両情報に基づいた勾配の推定では、ブレーキングによる自車両の減速分を考慮に入れることができない。すなわち、ブレーキング中の勾配については、第一勾配推定部104において正しく推定することができない。
【0027】
第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。このように、第二勾配推定部105において、車両情報以外の情報に基づいて、第一勾配推定部104とは別の方法により勾配推定を行うことで、自車両の挙動に関わらず走行地点の勾配を推定することができる。すなわち、ブレーキング中であっても正しい勾配を推定できる。なお、第二勾配推定部105による具体的な勾配推定の方法は、後で図3および4のフローチャートにより詳しく説明する。
【0028】
選択部106は、自車両のブレーキ制御装置からCANを介して送信されるブレーキ情報に基づいて、ブレーキのオン/オフ状態に応じたスイッチ切替動作を行う。ブレーキがオフである場合、すなわち車両のブレーキが運転者によって操作されていないときに、選択部106は、第一勾配推定部104を選択するようにスイッチを切り替える。他方、ブレーキがオンである場合、すなわち車両のブレーキが運転者によって操作されたときに、選択部106は、第二勾配推定部105を選択するようにスイッチを切り替える。こうして第一勾配推定部104または第二勾配推定部105のいずれか一方が選択部106により選択されると、選択された方において推定された走行地点の勾配の値が記憶部107へ出力される。
【0029】
記憶部107は、選択部106の選択結果に応じて、第一勾配推定部104または第二勾配推定部105による勾配の推定結果を勾配履歴として記憶する。このとき、推定された勾配値と、その勾配値に対応する走行地点とを互いに関連付けて記憶しておく。これにより、過去に一度でも勾配を推定したことのある地点であれば、その地点における勾配値を記憶部107に記憶された勾配履歴の中から検索できるようにしておく。なお、記憶部107は、フラッシュメモリ等を用いて実現することができる。あるいは、HDD13の記憶領域の一部を記憶部107として利用してもよい。
【0030】
以上説明したような各機能ブロックが行う動作により、勾配推定部100において、自車両の走行地点の勾配が推定される。この推定結果は、CANを介した通信により、勾配情報として制御部10から外部へ出力され、自車両における各種制御、たとえば変速制御や駆動制御などに用いられる。
【0031】
次に、勾配推定部100により行われる勾配推定処理について説明する。図3は、勾配推定処理のフローチャートである。このフローチャートに従って勾配推定処理が行われることにより、自車両の走行地点の勾配が制御部10(勾配推定部100)において推定される。
【0032】
ステップS10において、勾配推定部100は、自車両の走行地点に関する走行地点情報を取得する。この走行地点情報は、前述のように自車両の走行地点と共に、その走行地点に対応する道路や施設の種類、形状、名称などを表している。走行地点情報の取得は、HDD13に記録されている地図データに基づいて、走行地点情報取得部103により行われる。
【0033】
ステップS20において、勾配推定部100は、自車両が立体駐車場に進入したか否かを判定する。ここでいう立体駐車場は、階層構造を有しており、自車両がその内部を上下方向に立体的に移動可能な駐車場を表している。典型的には、入口から上階へ向かって昇っていくタイプのものと、入口から地下へ向かって下っていくタイプのものとが判定対象の立体駐車場に含まれる。この立体駐車場への進入判定は、ステップS10で取得した走行地点情報に基づいて行われる。すなわち、取得した走行地点情報において、自車両の位置が道路上から立体駐車場内に移動したことが示されている場合は、自車両が立体駐車場へ進入したと判定する。それ以外の場合は、自車両が立体駐車場へ進入していないと判定する。
【0034】
上記のような立体駐車場への進入判定により、自車両が立体駐車場に進入したと判定された場合は、ステップS30へ進み、進入フラグの設定を行う。この進入フラグは、自車両が立体駐車場に進入していることを示すためのフラグ情報であり、勾配推定部100において内部的に設定されるものである。ステップS30において進入フラグを設定したら、勾配推定部100は次のステップS40へ進む。一方、ステップS20において自車両が立体駐車場に進入していないと判定された場合、勾配推定部100はステップS30を実行せずにステップS40へ進む。
【0035】
ステップS40において、勾配推定部100は、自車両のブレーキがオンであるか否かを判定する。この判定は、前述のように自車両のブレーキ制御装置からCANを介して送信されるブレーキ情報に基づいて行われる。ブレーキがオンである場合はステップS50へ進み、オフである場合はステップS70へ進む。
【0036】
ステップS50において、勾配推定部100は、ブレーキ前の勾配が所定値以上であったか否かを判定する。この判定は、ステップS40においてブレーキがオンであると判定される直前に推定されて記憶部107に記憶された勾配値に基づいて行われる。この勾配値が所定値、たとえば2°以上である場合はステップS60へ進み、所定値未満であればステップS70へ進む。
【0037】
ステップS60において、勾配推定部100は、ブレーキ中の勾配を推定するためのブレーキ中勾配推定処理を実行する。この処理は、勾配推定部100において第二勾配推定部105により実行される。ブレーキ中勾配推定処理の具体的な内容は、後で図4のフローチャートにより詳しく説明する。なお、ステップS60を実行する場合、選択部106において、前述したとおり第二勾配推定部105を選択するようにスイッチの切替が行われる。ステップS60を実行したらステップS80へ進む。
【0038】
ステップS70において、勾配推定部100は、車両情報取得部101において取得された車両情報に基づく勾配推定を行う。すなわち、前述のように車両情報に含まれる自車両のトルクおよび車重に基づいて自車両の加速度を推定し、その加速度に対する車速の変化から自車両の走行地点の勾配を推定する。この処理は、勾配推定部100において第一勾配推定部104により実行される。なお、ステップS70を実行する場合、選択部106において、前述したとおり第一勾配推定部104を選択するようにスイッチの切替が行われる。ステップS70を実行したらステップS80へ進む。
【0039】
ステップS80において、勾配推定部100は、進入フラグの設定があるか否かを判定する。この進入フラグの設定は、前述のとおりステップS20において自車両が立体駐車場に進入したと判定されたときに、ステップS30において行われるものである。進入フラグが設定されている場合はステップS90へ進み、設定されていない場合はステップS120へ進む。
【0040】
ステップS90において、勾配推定部100は、ステップS60またはS70のいずれかによる勾配の推定結果を、立体駐車場へ進入する際の勾配値である進入勾配値として、記憶部107に記憶する。これにより、ステップS20で自車両が立体駐車場に進入したと判定されると、そのときに第一勾配推定部104または第二勾配推定部105のいずれかによって推定された走行地点の勾配が、進入勾配値として記憶部107により記憶される。なお、この進入勾配値の記憶は、前述したように走行地点と関連付けて行われる。すなわち、自車両が立体駐車場に進入しているときには、その立体駐車場内における自車両の位置ごとに進入勾配値が記憶される。
【0041】
ステップS100において、勾配推定部100は、自車両が立体駐車場への進入を完了したか否かを判定する。この判定は、たとえば、自車両が駐車を完了したか否かを判定することによって行われる。すなわち、自車両が駐車を完了した場合は、立体駐車場への進入を完了したと判定してステップS110へ進み、進入フラグの設定を解除する。ステップS110を実行したら、勾配推定部100はステップS10へ戻る。一方、自車両がまだ駐車を完了していない場合は、立体駐車場への進入も未完了であると判定し、ステップS110を実行せずにステップS10へ戻る。なお、自車両が駐車を完了したか否かの判定は、たとえば、自車両のシフトレバーが「P」の位置に操作されたことを検出するなどの方法によって行うことができる。
【0042】
一方、ステップS80で進入フラグが設定されていないと判定してステップS120へ進んだ場合、ステップS120において、勾配推定部100は、ステップS60またはS70のいずれかによる勾配の推定結果を、通常の勾配値として記憶部107に記憶する。この勾配値の記憶も、ステップS90における進入勾配値と同様に、自車両の走行地点と関連付けて行われる。これにより、過去に推定された勾配値とその勾配値に対応する走行地点とを互いに関連付けた勾配履歴が記憶部107において記憶される。ステップS120を実行したら、勾配推定部100はステップS10へ戻る。
【0043】
なお、上記ステップS120において、既に勾配履歴が記録されている地点を自車両が再度走行し、新たに勾配値が推定された場合は、その勾配値に基づいて勾配履歴の内容を逐次更新することが好ましい。たとえば、これまでに推定された各勾配値の平均値や中央値等を用いて勾配履歴を更新することができる。
【0044】
勾配推定部100では、以上説明したような勾配推定処理が所定時間ごとに行われる。これにより、選択部106によって選択された第一勾配推定部104または第二勾配推定部105を用いて、自車両の走行地点の勾配が推定される。
【0045】
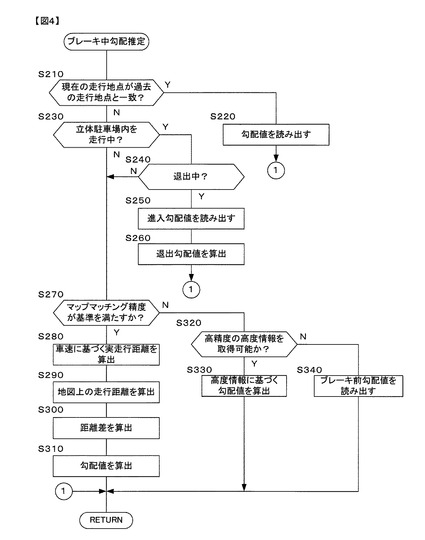
次に、図3のステップS60で実行されるブレーキ中勾配推定処理の内容について説明する。図4は、ブレーキ中勾配推定処理のフローチャートである。このフローチャートは、勾配推定部100において第二勾配推定部105により実行されるものである。
【0046】
ステップS210において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報および記憶部107に記憶されている勾配履歴に基づいて、現在の自車両の走行地点が過去の走行地点と一致するか否かを判定する。この判定は、自車両の走行地点に対応する勾配値が記憶部107の勾配履歴において記憶されているか否かを判定することによって行われる。すなわち、過去に実行された図3のステップS120の処理により、その走行地点に対応する勾配値が記憶部107において勾配履歴として記憶されている場合は、現在の自車両の走行地点が過去の走行地点と一致すると判定してステップS220へ進む。一方、走行地点に対応する勾配値が記憶部107において勾配履歴として記憶されていない場合は、現在の自車両の走行地点が過去の走行地点と一致していないと判定してステップS230へ進む。
【0047】
ステップS220において、第二勾配推定部105は、自車両の走行地点に対応する勾配値を記憶部107から読み出す。すなわち、記憶部107において記憶されている勾配履歴の中から、自車両の走行地点に関連付けられた勾配値を検索し、これを記憶部107より読み出す。こうして読み出した勾配値は、当該走行地点における勾配の推定結果として用いられる。
【0048】
現在の自車両の走行地点が過去の走行地点と一致する場合は、上記のようにしてステップS220の処理が実行されることにより、予め記憶部107に記憶された勾配履歴に基づいて、その走行地点の勾配が推定される。ステップS220を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0049】
ステップS230において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報に基づいて、自車両が立体駐車場内を走行中であるか否かを判定する。立体駐車場内を走行中である場合、すなわち自車両が立体駐車場内にいることを示す情報が取得した走行地点情報の中に含まれていた場合はステップS240へ進み、そうでない場合はステップS270へ進む。
【0050】
ステップS240において、第二勾配推定部105は、自車両が立体駐車場から退出中であるか否かを判定する。この判定は、たとえば、前述の進入フラグが設定されているか否かによって行うことができる。すなわち、図3のステップS110による進入フラグの解除がまだ行われておらず、進入フラグが設定された状態のままである場合は、自車両が立体駐車場内へ進入中であり、退出中ではないと判定する。この場合、ステップS270へ進む。一方、設定された進入フラグが図3のステップS110において既に解除されている場合は、自車両が立体駐車場から退出中であると判定する。この場合、ステップS250へ進む。なお、上記で説明した以外の方法によって自車両が立体駐車場から退出中であるか否かを判定してもよい。たとえば、立体駐車場内における自車両の走行軌跡に基づいて判定したり、立体駐車場に設けられた出口ゲートの通過を検出することで判定したりしてもよい。
【0051】
ステップS250において、第二勾配推定部105は、図3のステップS90で記憶された進入勾配値を記憶部107から読み出す。ここでは、当該立体駐車場について記憶部107に記憶されている進入勾配値のうち、その立体駐車場内における自車両の位置に対応する進入勾配値を読み出すようにする。
【0052】
ステップS260において、第二勾配推定部105は、ステップS250で記憶部107から読み出した進入勾配値に基づいて、自車両が当該立体駐車場から退出するときの勾配値である退出勾配値を算出する。すなわち、立体駐車場からの退出時は、進入時とは反対向きに自車両が走行していると考えられるため、読み出した進入勾配値の符号を反転させることにより、退出勾配値を算出する。
【0053】
自車両が立体駐車場から退出する場合は、上記のようにしてステップS250およびS260の処理が実行されることにより、記憶部107に予め記憶された進入勾配値に基づいて、自車両の走行地点の勾配としての退出勾配値が推定される。ステップS260を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0054】
ステップS270において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報に基づいて、自車両の走行地点付近におけるマップマッチングの精度が所定の基準を満たすか否かを判定する。この判定は、たとえば、自車両の走行地点を含む道路区間の形状に基づいて行うことができる。すなわち、自車両の走行地点付近の道路区間がマップマッチングに適した形状、たとえばカーブやクランク状の特徴的な形状を有する場合には、マップマッチングの精度が所定の基準を満たすと判定する。この場合、ステップS280へ進む。一方、自車両の走行地点付近の道路区間が直線状などのマップマッチングが困難な形状である場合は、マップマッチングの精度が所定の基準を満たさないと判定する。この場合、ステップS320へ進む。
【0055】
なお、上述した以外の方法によりステップS270の判定を行ってもよい。たとえば、GPS信号の受信状態、道路上の特定の位置において車両に送信される情報(ビーコンからのVICS情報、ETC(Electronic Toll Collection System)の料金所アンテナからの送信情報等)の受信状態、車載カメラによる撮像画像などに基づいて、自車両の走行地点付近におけるマップマッチングの精度を判断し、ステップS270の判定を行うことができる。
【0056】
ステップS280において、第二勾配推定部105は、自車両の車速に基づく実走行距離を算出する。すなわち、車両情報取得部101により車両情報の一部として取得された自車両の車速に基づいて、所定の道路区間を走行したときの自車両の実走行距離を算出する。なお、ここで実走行距離の算出対象とする道路区間は、ステップS270においてマップマッチング精度が基準を満たすと判定された道路区間と一致するか、少なくとも当該道路区間に含まれていることが好ましい。
【0057】
ステップS290において、第二勾配推定部105は、ステップS280で実走行距離を算出した道路区間について、地図上の走行距離を算出する。ここでは、HDD13に記録されている地図データに基づいて、当該道路区間の地図上の距離、すなわち当該道路区間に対応するリンクの長さを求めることにより、地図上の走行距離を算出する。
【0058】
ステップS300において、第二勾配推定部105は、実走行距離と地図上の走行距離との間における距離差を算出する。ここでは、ステップS280で算出した実走行距離と、ステップS290で算出した地図上の走行距離との差分を求めることで、これらの距離差を算出することができる。
【0059】
ステップS310において、第二勾配推定部105は、ステップS300で算出した距離差に基づいて、自車両の走行地点における勾配値を算出する。すなわち、ステップS290で算出した地図上の走行距離は、勾配が0であるときの理論的な走行距離を表しているため、これと実走行距離との差から、走行地点における実際の勾配値を求めることができる。具体的には、実走行距離をR1、地図上の走行距離をR2、勾配値をθとすると、以下の式(1)により勾配値θを求めることができる。
θ=cos−1(R1/R2) ・・・(1)
【0060】
自車両の走行地点付近におけるマップマッチングの精度が所定の基準を満たす場合は、上記のようにしてステップS280〜S310の処理が実行されることにより、HDD13に予め記憶された地図データに基づいて、自車両の走行地点の勾配が推定される。ステップS310を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0061】
ステップS320において、第二勾配推定部105は、高度情報取得部102によって高精度の高度情報を取得可能であるか否かを判定する。この判定は、たとえば、高度情報として取得された気圧センサ12からの気圧信号やGPS受信部14からのGPS信号の精度が所定の水準を満たすか否かを判断することによって行われる。すなわち、気圧信号によって示された大気圧の変動が自車両の運動状態に応じた所定の範囲内である場合や、GPS信号を安定的に受信可能な状況である場合は、高精度の高度情報を取得可能であると判定してステップS330へ進む。一方、気圧信号によって示された大気圧の変動が所定範囲を超える場合や、GPS信号が受信可能でない状況、たとえばトンネル内や屋内を自車両が走行しているような状況の場合には、高精度の高度情報を取得可能でないと判定してステップS340へ進む。なお、これ以外の方法により高精度の高度情報を取得可能であるか否かを判定することとしてもよい。
【0062】
ステップS330において、第二勾配推定部105は、高度情報取得部102により取得された高度情報に基づいて、自車両の走行地点における勾配値を算出する。すなわち、所定時間内における自車両の高度変化量を高度情報から求め、その高度変化量と自車両の走行距離との関係から、自車両の走行地点における勾配値を算出する。
【0063】
高精度の高度情報を取得可能である場合は、上記のようにしてステップS330の処理が実行されることにより、取得された高度情報に基づいて自車両の走行地点の高度が求められ、これに基づいて自車両の走行地点の勾配が推定される。ステップS330を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0064】
ステップS340において、第二勾配推定部105は、ブレーキ前勾配値、すなわち図3のステップS40でブレーキがオンであると判定される直前の勾配値を、記憶部107から読み出す。なお、ここで読み出されるブレーキ前勾配値は、ステップS40でブレーキがオンであると判定される直前に、図3のステップS70において第一勾配推定部104により推定され、ステップS90またはS120において記憶部107に記憶された勾配値である。こうして読み出したブレーキ前勾配値は、当該走行地点における勾配の推定結果として用いられる。
【0065】
前述のステップS210〜S330で説明したようないずれの方法でも走行地点の勾配が推定できないような場合は、ステップS340の処理が実行されることにより、予め記憶部107に記憶されたブレーキ前勾配値に基づいて、その走行地点の勾配が推定される。ステップS340を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0066】
以上説明した実施の形態によれば、次の作用効果を奏する。
【0067】
(1)ナビゲーション装置1は、勾配推定部100において、第一勾配推定部104により自車両の走行地点の勾配を推定すると共に、第一勾配推定部104とは異なる方法で、第二勾配推定部105により自車両の走行地点の勾配を推定する。そして、自車両のブレーキが運転者によって操作されたか否かを判定し、その判定結果に応じて、選択部106により、第一勾配推定部104または第二勾配推定部105のいずれかを選択する。すなわち、自車両のブレーキが操作されていないと判定されたときには第一勾配推定部104を選択し、自車両のブレーキが操作されたと判定されたときには第二勾配推定部105を選択する。こうして選択された第一勾配推定部104または第二勾配推定部105を用いて、自車両の走行地点の勾配を推定することとした。このようにしたので、自車両がブレーキング中であっても正しい勾配を推定できる。
【0068】
(2)勾配推定部100において、車両情報取得部101は、自車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得する。第一勾配推定部104は、こうして車両情報取得部101により取得された車両情報に基づいて、自車両の走行地点の勾配を推定する。一方、第二勾配推定部105は、この車両情報以外の情報に基づいて、自車両の走行地点の勾配を推定する。このようにしたので、自車両がブレーキング中でないときの勾配とブレーキング中の勾配とをそれぞれ正確に推定することができる。
【0069】
(3)第二勾配推定部105は、車両情報以外の情報として、自車両の走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つに基づいて、自車両の走行地点の勾配を推定することができる。したがって、状況に応じて最適な方法を用いて、自車両がブレーキング中の勾配を推定することができる。
【0070】
(4)自車両の走行地点の高度に基づく勾配推定において、第二勾配推定部105は、高度情報取得部102により取得された高度情報に基づいて、自車両の走行地点の勾配を推定する(ステップS330)。このようにしたので、自車両の走行地点の高度に基づいてブレーキング中の勾配を正確に推定することができる。
【0071】
(5)予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、自車両が立体駐車場に進入したか否かを判定し(ステップS20)、進入したと判定されたときに、ステップS70で第一勾配推定部104により推定された勾配、またはステップS60で第二勾配推定部105により推定された勾配を、進入勾配値として記憶部107に記憶する(ステップS90)。そして、第二勾配推定部105により、自車両が当該立体駐車場から退出中であるか否かを判定し(ステップS240)、退出中であると判定されたときに、ステップS90で記憶部107に記憶された進入勾配値に基づいて、自車両の走行地点の勾配を推定する(ステップS250、S260)。このようにしたので、自車両が立体駐車場を退出する際のブレーキング中の勾配を正確に推定することができる。
【0072】
(6)予め記憶された地図データに基づく勾配推定において、第二勾配推定部105は、所定の道路区間における自車両の実走行距離を算出し(ステップS280)、さらに、予め記憶された地図データに基づいて当該道路区間における自車両の地図上の走行距離を算出する(ステップS290)。こうして算出された実走行距離と地図上の走行距離との差分を算出し(ステップS300)、この差分に基づいて、自車両の走行地点の勾配を推定する(ステップS310)。このようにしたので、実走行距離と地図上の走行距離との間に差がある場合に、自車両がブレーキング中の勾配を正確に推定することができる。
【0073】
(7)なお、上記(6)の勾配推定を行う場合、第二勾配推定部105は、自車両の走行地点を少なくとも含む道路区間に対してマップマッチング精度が所定の基準を満たすか否かを判定する(ステップS270)。この判定によってマップマッチング精度が基準を満たすと判定された道路区間について、ステップS280およびS290において実走行距離および地図上の走行距離をそれぞれ算出して、自車両の走行地点の勾配を推定するようにした。このようにしたので、マップマッチング精度が低いために自車両の地図上の走行距離が正しく算出できないような状況において、不正確な勾配値が誤って求められてしまうのを防ぐことができる。
【0074】
(8)また、予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、第一勾配推定部104または第二勾配推定部105により過去に推定された勾配とその勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶部107に記憶する(ステップS120)。そして、第二勾配推定部105により、記憶部107に記憶された勾配履歴に基づいて、現在の走行地点が過去の走行地点と一致するか否かを判定し(ステップS210)、一致すると判定されたときに、その勾配履歴に基づいて、自車両の走行地点の勾配を推定する(ステップS220)。このようにしたので、過去に自車両が走行したことのある場所においてブレーキング中の勾配を正確に推定することができる。
【0075】
(9)さらに、予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、ステップS40で自車両のブレーキが操作されたと判定される直前に第一勾配推定部104により推定された勾配を、ブレーキ前勾配値として記憶部107に記憶する(ステップS90、S120)。そして、第二勾配推定部105により、ステップS90またはS120で記憶部107に記憶されたブレーキ前勾配値に基づいて、自車両の走行地点の勾配を推定する(ステップS340)。このようにしたので、上記(4)〜(8)のような勾配推定方法を用いることができない状況であっても、自車両がブレーキング中の勾配を正確に推定することができる。
【0076】
なお、以上説明した実施の形態では、上記(4)〜(9)で説明したいずれかの勾配推定方法を用いて、自車両がブレーキング中の勾配を推定することとした。すなわち、第二勾配推定部105において、高度情報取得部102により取得された高度情報、予め記憶部107に記憶された進入勾配値、実走行距離と地図上の走行距離との差分、予め記憶部107に記憶された勾配履歴、または予め記憶部107に記憶されたブレーキ前勾配値のいずれか少なくとも一つを勾配推定用情報として選択し、これに基づいて自車両の走行地点の勾配を推定するようにした。しかし、本発明では、これらの勾配推定方法を必ずしも全て適用する必要はなく、いずれか一つ以上の任意の勾配推定方法を選択的に適用してもよい。
【0077】
上記のように任意の勾配推定方法を選択的に適用する場合は、図3および4のフローチャートにおいて、適用外とした勾配推定方法に対応する処理を省略することができる。たとえば、(4)で述べた高度情報に基づく勾配推定方法を適用しない場合は、図4のフローチャートにおいて、ステップS320およびS330の各処理を省略することができる。また、(5)で述べた進入勾配値に基づく勾配推定方法を適用しない場合は、図3のフローチャートにおいて、ステップS20、S30、S80〜S110の各処理を省略できると共に、図4のフローチャートにおいて、ステップS230〜S260の各処理を省略することができる。これ以外の場合であっても同様に、適用外とした勾配推定方法に対応する処理を省略することができる。
【0078】
あるいは、複数の勾配推定方法を同時に用いて勾配推定を行い、得られた複数の勾配値に基づいて、自車両がブレーキング中の勾配を推定することとしてもよい。すなわち、上記(4)〜(9)で説明した勾配推定方法のうち、そのときの状況に応じて適用可能な一つまたは複数の勾配推定方法を選択し、それぞれの方法に従って勾配推定方法を行う。こうして推定された各勾配値の統計値、たとえば平均値や中央値などを用いて、自車両がブレーキング中の勾配を推定することができる。
【0079】
また、以上説明した実施の形態では、自車両の走行地点に対応する勾配値が記憶部107の勾配履歴において記録されていれば、ステップS210で現在の自車両の走行地点が過去の走行地点と一致すると判定し、その勾配値をステップS220で読み出すこととした。すなわち、過去に一度でも勾配値が推定された地点であれば、その勾配値を用いて自車両がブレーキング中の勾配を推定することとした。しかし、これを所定回数以上、たとえば10回以上勾配値の推定が行われた地点に限って行うこととしてもよい。
【0080】
以上説明した実施の形態において、自車両に対して垂直方向に加わる加速度を加速度センサにより検出し、その検出値に基づいてブレーキング中の勾配を推定するようにしてもよい。このようにすれば、ブレーキングによって自車両に生じる減速度の大きさに関わらず、勾配の大きさに応じた重力加速度を加速度センサによって検出し、ブレーキング中の勾配を推定することができる。
【0081】
上記実施の形態では、本発明による勾配推定をナビゲーション装置1において実現する例を説明したが、ナビゲーション装置以外の車載装置を用いてこれを実現してもよい。あるいは、ナビゲーション装置とは別個に設けられた勾配推定装置や情報端末を用いてこれを行ってもよい。
【0082】
以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0083】
1:ナビゲーション装置、10:制御部、11:振動ジャイロ、12:気圧センサ、
13:HDD、14:GPS受信部、15:表示モニタ、16:入力装置、
100:勾配推定部、101:車両情報取得部、102:高度情報取得部、
103:走行地点情報取得部、104:第一勾配推定部、105:第二勾配推定部、
106:選択部、107:記憶部
【技術分野】
【0001】
本発明は、車両の走行地点の勾配を推定する装置および方法に関する。
【背景技術】
【0002】
従来、車両の走行地点の勾配を推定し、その推定結果に基づいて車両の変速制御や駆動制御を行う技術が知られている。特許文献1には、エンジン回転数やスロットル開度などに基づいて出力軸トルクを推定し、推定した出力軸トルクから平地走行抵抗や加速抵抗の分を差し引いて勾配を推定することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−201523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の方法では、ブレーキングによる車両の減速が考慮されていないため、ブレーキング中の出力軸トルクを正確に推定するのが困難である。したがって、車両のブレーキング中は正しい勾配が推定できない。
【課題を解決するための手段】
【0005】
本発明による車載勾配推定装置は、第一の推定方法により車両の走行地点の勾配を推定する第一勾配推定手段と、第一の推定方法とは異なる第二の推定方法により走行地点の勾配を推定する第二勾配推定手段と、車両のブレーキが運転者によって操作されたか否かを判定するブレーキ判定手段と、ブレーキ判定手段により車両のブレーキが操作されていないと判定されたときには第一勾配推定手段を選択し、ブレーキ判定手段により車両のブレーキが操作されたと判定されたときには第二勾配推定手段を選択する推定方法選択手段とを備え、選択手段により選択された第一勾配推定手段または第二勾配推定手段を用いて、走行地点の勾配を推定するものである。
本発明による勾配推定方法は、車両に搭載された情報端末により車両の走行地点の勾配を推定する方法であって、情報端末により、車両のブレーキが運転者によって操作されたか否かに応じて、第一の推定方法、または第一の推定方法とは異なる第二の推定方法のいずれか一方を選択し、選択された第一の推定方法または第二の推定方法を用いて、走行地点の勾配を推定するものである。
【発明の効果】
【0006】
本発明によれば、車両がブレーキング中であっても正しい勾配を推定できる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による勾配推定方法を適用したナビゲーション装置の構成図である。
【図2】勾配推定部の機能ブロック図である。
【図3】本実施形態による勾配推定処理のフローチャートである。
【図4】ブレーキ中勾配推定のフローチャートである。
【発明を実施するための形態】
【0008】
本発明の一実施の形態による勾配推定方法を適用したナビゲーション装置の構成を図1に示す。ナビゲーション装置1は、制御部10、振動ジャイロ11、気圧センサ12、ハードディスクドライブ(HDD)13、GPS(Global Positioning System)受信部14、表示モニタ15および入力装置16を備えている。
【0009】
制御部10は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD13に記録されている制御プログラムや地図データに基づいて、各種の処理を実行する。この制御部10により、自車両を目的地まで案内するための様々な処理が実行される。たとえば、目的地を設定する際の目的地の探索処理、設定された目的地までの推奨経路の探索処理、自車位置の検出処理、各種の画像表示処理、ルート案内時の音声出力処理などが実行される。
【0010】
制御部10は、CAN(Controller Area Network)と接続されており、CANを介して車両内の各部と通信を行うことができる。たとえば、車両のエンジン制御装置から出力される駆動トルク情報、ブレーキ制御装置から出力されるブレーキ情報、車速センサから出力される車速情報などが、CANを介した通信により制御部10へ入力される。また、制御部10において求められた走行地点の勾配情報などが、CANを介した通信により制御部10から外部へ出力される。
【0011】
なお、制御部10には、本発明による勾配推定方法を実行するための勾配推定部100が機能的に含まれている。勾配推定部100の詳細については、後で図2を用いて詳しく説明する。
【0012】
振動ジャイロ11は、自車両の角速度を検出するためのセンサである。この振動ジャイロ11によって検出された角速度に基づいて、自車両の進行方向が求められる。
【0013】
気圧センサ12は、自車両周囲の大気圧を計測するためのセンサである。この気圧センサ12によって検出された大気圧に基づいて、自車両が走行している地点の高度を算出することができる。気圧センサ12による検出結果は、気圧信号として制御部10へ出力される。
【0014】
HDD13は不揮発性の記録媒体であり、制御部10において上記のような処理を実行するための制御プログラムや地図データなどが記録されている。HDD13に記録されているデータは、必要に応じて制御部10の制御により読み出され、制御部10が実行する様々な処理や制御に利用される。
【0015】
HDD13に記録された地図データは、経路計算データと、道路データと、背景データとを含む。経路計算データは、目的地までの推奨経路を探索する際などに用いられるデータである。道路データは、道路の形状や種別などを表すデータである。なお、地図データにおいて各道路の最小単位はリンクと呼ばれている。すなわち、地図データにおいて各道路は複数のリンクにより構成される。背景データは、地図の背景を表すデータである。なお、地図の背景とは、地図上に存在する道路以外の様々な構成物である。たとえば、河川、鉄道、緑地帯、各種構造物などが背景データによって表される。
【0016】
なお、上記ではナビゲーション装置1において地図データがHDD13に記録されている例を説明したが、これらをHDD以外の記録媒体に記録することとしてもよい。たとえば、CD−ROMやDVD−ROM、メモリカードなどに記録された地図データを用いることができる。すなわち、本実施の形態によるナビゲーション装置では、どのような記録媒体を用いてこれらのデータを記憶してもよい。
【0017】
GPS受信部14は、GPS衛星から送信されるGPS信号を受信して制御部10へ出力する。GPS信号には、自車両の位置を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻に関する情報が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて、自車位置を制御部10において算出することができる。このGPS信号に基づく自車位置の算出結果と、振動ジャイロ11による進行方向の検出結果、および前述のCANを介した通信によって取得される車速情報に基づいて、所定時間ごとに自車位置が検出される。なお、GPS信号に基づいて自車両の高度を求めることもできる。
【0018】
表示モニタ15は、ナビゲーション装置1において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ15により、地図画面の表示などが行われる。表示モニタ15に表示される画面の内容は、制御部10が行う画面表示制御によって決定される。表示モニタ15は、たとえば自車両のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0019】
入力装置16は、ナビゲーション装置1を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザは、入力装置16を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、地図を任意の方向にスクロールしたりすることができる。この入力装置16は、操作パネルやリモコンなどによって実現することができる。あるいは、入力装置16を表示モニタ15と一体化されたタッチパネルとしてもよい。
【0020】
ユーザが入力装置16を操作して目的地を設定すると、ナビゲーション装置1は、前述のようにして検出された自車位置を出発地として、前述の経路計算データに基づいて所定のアルゴリズムの演算によるルート探索処理を行う。このルート探索処理により、出発地から目的地まで至る推奨経路が探索されると、探索された推奨経路にしたがってルート案内が行われ、自車両が目的地まで誘導される。
【0021】
次に、制御部10における勾配推定部100の詳細について説明する。図2は、勾配推定部100の機能ブロック図である。勾配推定部100は、車両情報取得部101、高度情報取得部102、走行地点情報取得部103、第一勾配推定部104、第二勾配推定部105、選択部106および記憶部107の各機能ブロックを有している。
【0022】
車両情報取得部101は、勾配推定を行うために必要な車両情報を取得する。車両情報取得部101によって取得される車両情報には、自車両の駆動トルク(トルク)、走行速度(車速)、重量(車重)などが含まれる。トルクと車速の情報は、前述のように自車両のエンジン制御装置や車速センサからCANを介して所定時間ごとに取得することができる。一方、車重の情報は、自車両において予め設定された情報として取得することができる。あるいは、他の方法で車重の情報を取得してもよい。たとえば、走行中の自車両の挙動に基づいて車重を推測したり、道路上などに設置された車重計測装置から送信される計測信号を受信したりしてもよい。車両情報取得部101によって取得されたこれらの車両情報は、第一勾配推定部104へ出力される。
【0023】
高度情報取得部102は、自車両の走行地点の高度に関する高度情報として、気圧センサ12から出力される気圧信号とGPS受信部14から出力されるGPS信号とを取得する。これらの高度情報に基づいて、自車両の走行地点の高度が推定される。すなわち、気圧信号が表す大気圧と、GPS信号に基づいて算出されるGPS衛星からの距離とに基づいて、走行地点の高度を求めることができる。なお、気圧信号とGPS信号のいずれか一方のみを高度情報として取得してもよい。あるいは、これ以外の情報を高度情報として取得してもよい。たとえば、地図データにおいて各地点の高度を記録しておき、これに基づいて走行地点に対応する高度情報を取得してもよい。高度情報取得部102によって取得された高度情報は、第二勾配推定部105へ出力される。
【0024】
走行地点情報取得部103は、HDD13に記録されている地図データに基づいて、自車両の走行地点の様子を表す走行地点情報を取得する。たとえば、自車両が道路上を走行している場合は、そのときの走行地点すなわち自車位置を表す情報と共に、その道路の種類や形状などの情報が走行地点情報として取得される。また、自車両が道路から外れて何らかの施設内にいるような場合は、そのときの走行地点すなわち自車位置を表す情報と共に、その施設の種類や名称などに関する情報が走行地点情報として取得される。走行地点情報取得部103によって取得されたこれらの走行地点情報は、第二勾配推定部105へ出力される。
【0025】
第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。すなわち、車両情報に含まれる自車両のトルクおよび車重に基づいて自車両の加速度を推定し、その加速度に対する車速の変化から自車両の走行地点の勾配を推定する。このとき、道路の走行抵抗や車重などを考慮に入れることが好ましい。
【0026】
なお、車両情報取得部101において、自車両におけるブレーキングの強さは車両情報として取得されない。したがって、第一勾配推定部104によって行われる車両情報に基づいた勾配の推定では、ブレーキングによる自車両の減速分を考慮に入れることができない。すなわち、ブレーキング中の勾配については、第一勾配推定部104において正しく推定することができない。
【0027】
第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。このように、第二勾配推定部105において、車両情報以外の情報に基づいて、第一勾配推定部104とは別の方法により勾配推定を行うことで、自車両の挙動に関わらず走行地点の勾配を推定することができる。すなわち、ブレーキング中であっても正しい勾配を推定できる。なお、第二勾配推定部105による具体的な勾配推定の方法は、後で図3および4のフローチャートにより詳しく説明する。
【0028】
選択部106は、自車両のブレーキ制御装置からCANを介して送信されるブレーキ情報に基づいて、ブレーキのオン/オフ状態に応じたスイッチ切替動作を行う。ブレーキがオフである場合、すなわち車両のブレーキが運転者によって操作されていないときに、選択部106は、第一勾配推定部104を選択するようにスイッチを切り替える。他方、ブレーキがオンである場合、すなわち車両のブレーキが運転者によって操作されたときに、選択部106は、第二勾配推定部105を選択するようにスイッチを切り替える。こうして第一勾配推定部104または第二勾配推定部105のいずれか一方が選択部106により選択されると、選択された方において推定された走行地点の勾配の値が記憶部107へ出力される。
【0029】
記憶部107は、選択部106の選択結果に応じて、第一勾配推定部104または第二勾配推定部105による勾配の推定結果を勾配履歴として記憶する。このとき、推定された勾配値と、その勾配値に対応する走行地点とを互いに関連付けて記憶しておく。これにより、過去に一度でも勾配を推定したことのある地点であれば、その地点における勾配値を記憶部107に記憶された勾配履歴の中から検索できるようにしておく。なお、記憶部107は、フラッシュメモリ等を用いて実現することができる。あるいは、HDD13の記憶領域の一部を記憶部107として利用してもよい。
【0030】
以上説明したような各機能ブロックが行う動作により、勾配推定部100において、自車両の走行地点の勾配が推定される。この推定結果は、CANを介した通信により、勾配情報として制御部10から外部へ出力され、自車両における各種制御、たとえば変速制御や駆動制御などに用いられる。
【0031】
次に、勾配推定部100により行われる勾配推定処理について説明する。図3は、勾配推定処理のフローチャートである。このフローチャートに従って勾配推定処理が行われることにより、自車両の走行地点の勾配が制御部10(勾配推定部100)において推定される。
【0032】
ステップS10において、勾配推定部100は、自車両の走行地点に関する走行地点情報を取得する。この走行地点情報は、前述のように自車両の走行地点と共に、その走行地点に対応する道路や施設の種類、形状、名称などを表している。走行地点情報の取得は、HDD13に記録されている地図データに基づいて、走行地点情報取得部103により行われる。
【0033】
ステップS20において、勾配推定部100は、自車両が立体駐車場に進入したか否かを判定する。ここでいう立体駐車場は、階層構造を有しており、自車両がその内部を上下方向に立体的に移動可能な駐車場を表している。典型的には、入口から上階へ向かって昇っていくタイプのものと、入口から地下へ向かって下っていくタイプのものとが判定対象の立体駐車場に含まれる。この立体駐車場への進入判定は、ステップS10で取得した走行地点情報に基づいて行われる。すなわち、取得した走行地点情報において、自車両の位置が道路上から立体駐車場内に移動したことが示されている場合は、自車両が立体駐車場へ進入したと判定する。それ以外の場合は、自車両が立体駐車場へ進入していないと判定する。
【0034】
上記のような立体駐車場への進入判定により、自車両が立体駐車場に進入したと判定された場合は、ステップS30へ進み、進入フラグの設定を行う。この進入フラグは、自車両が立体駐車場に進入していることを示すためのフラグ情報であり、勾配推定部100において内部的に設定されるものである。ステップS30において進入フラグを設定したら、勾配推定部100は次のステップS40へ進む。一方、ステップS20において自車両が立体駐車場に進入していないと判定された場合、勾配推定部100はステップS30を実行せずにステップS40へ進む。
【0035】
ステップS40において、勾配推定部100は、自車両のブレーキがオンであるか否かを判定する。この判定は、前述のように自車両のブレーキ制御装置からCANを介して送信されるブレーキ情報に基づいて行われる。ブレーキがオンである場合はステップS50へ進み、オフである場合はステップS70へ進む。
【0036】
ステップS50において、勾配推定部100は、ブレーキ前の勾配が所定値以上であったか否かを判定する。この判定は、ステップS40においてブレーキがオンであると判定される直前に推定されて記憶部107に記憶された勾配値に基づいて行われる。この勾配値が所定値、たとえば2°以上である場合はステップS60へ進み、所定値未満であればステップS70へ進む。
【0037】
ステップS60において、勾配推定部100は、ブレーキ中の勾配を推定するためのブレーキ中勾配推定処理を実行する。この処理は、勾配推定部100において第二勾配推定部105により実行される。ブレーキ中勾配推定処理の具体的な内容は、後で図4のフローチャートにより詳しく説明する。なお、ステップS60を実行する場合、選択部106において、前述したとおり第二勾配推定部105を選択するようにスイッチの切替が行われる。ステップS60を実行したらステップS80へ進む。
【0038】
ステップS70において、勾配推定部100は、車両情報取得部101において取得された車両情報に基づく勾配推定を行う。すなわち、前述のように車両情報に含まれる自車両のトルクおよび車重に基づいて自車両の加速度を推定し、その加速度に対する車速の変化から自車両の走行地点の勾配を推定する。この処理は、勾配推定部100において第一勾配推定部104により実行される。なお、ステップS70を実行する場合、選択部106において、前述したとおり第一勾配推定部104を選択するようにスイッチの切替が行われる。ステップS70を実行したらステップS80へ進む。
【0039】
ステップS80において、勾配推定部100は、進入フラグの設定があるか否かを判定する。この進入フラグの設定は、前述のとおりステップS20において自車両が立体駐車場に進入したと判定されたときに、ステップS30において行われるものである。進入フラグが設定されている場合はステップS90へ進み、設定されていない場合はステップS120へ進む。
【0040】
ステップS90において、勾配推定部100は、ステップS60またはS70のいずれかによる勾配の推定結果を、立体駐車場へ進入する際の勾配値である進入勾配値として、記憶部107に記憶する。これにより、ステップS20で自車両が立体駐車場に進入したと判定されると、そのときに第一勾配推定部104または第二勾配推定部105のいずれかによって推定された走行地点の勾配が、進入勾配値として記憶部107により記憶される。なお、この進入勾配値の記憶は、前述したように走行地点と関連付けて行われる。すなわち、自車両が立体駐車場に進入しているときには、その立体駐車場内における自車両の位置ごとに進入勾配値が記憶される。
【0041】
ステップS100において、勾配推定部100は、自車両が立体駐車場への進入を完了したか否かを判定する。この判定は、たとえば、自車両が駐車を完了したか否かを判定することによって行われる。すなわち、自車両が駐車を完了した場合は、立体駐車場への進入を完了したと判定してステップS110へ進み、進入フラグの設定を解除する。ステップS110を実行したら、勾配推定部100はステップS10へ戻る。一方、自車両がまだ駐車を完了していない場合は、立体駐車場への進入も未完了であると判定し、ステップS110を実行せずにステップS10へ戻る。なお、自車両が駐車を完了したか否かの判定は、たとえば、自車両のシフトレバーが「P」の位置に操作されたことを検出するなどの方法によって行うことができる。
【0042】
一方、ステップS80で進入フラグが設定されていないと判定してステップS120へ進んだ場合、ステップS120において、勾配推定部100は、ステップS60またはS70のいずれかによる勾配の推定結果を、通常の勾配値として記憶部107に記憶する。この勾配値の記憶も、ステップS90における進入勾配値と同様に、自車両の走行地点と関連付けて行われる。これにより、過去に推定された勾配値とその勾配値に対応する走行地点とを互いに関連付けた勾配履歴が記憶部107において記憶される。ステップS120を実行したら、勾配推定部100はステップS10へ戻る。
【0043】
なお、上記ステップS120において、既に勾配履歴が記録されている地点を自車両が再度走行し、新たに勾配値が推定された場合は、その勾配値に基づいて勾配履歴の内容を逐次更新することが好ましい。たとえば、これまでに推定された各勾配値の平均値や中央値等を用いて勾配履歴を更新することができる。
【0044】
勾配推定部100では、以上説明したような勾配推定処理が所定時間ごとに行われる。これにより、選択部106によって選択された第一勾配推定部104または第二勾配推定部105を用いて、自車両の走行地点の勾配が推定される。
【0045】
次に、図3のステップS60で実行されるブレーキ中勾配推定処理の内容について説明する。図4は、ブレーキ中勾配推定処理のフローチャートである。このフローチャートは、勾配推定部100において第二勾配推定部105により実行されるものである。
【0046】
ステップS210において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報および記憶部107に記憶されている勾配履歴に基づいて、現在の自車両の走行地点が過去の走行地点と一致するか否かを判定する。この判定は、自車両の走行地点に対応する勾配値が記憶部107の勾配履歴において記憶されているか否かを判定することによって行われる。すなわち、過去に実行された図3のステップS120の処理により、その走行地点に対応する勾配値が記憶部107において勾配履歴として記憶されている場合は、現在の自車両の走行地点が過去の走行地点と一致すると判定してステップS220へ進む。一方、走行地点に対応する勾配値が記憶部107において勾配履歴として記憶されていない場合は、現在の自車両の走行地点が過去の走行地点と一致していないと判定してステップS230へ進む。
【0047】
ステップS220において、第二勾配推定部105は、自車両の走行地点に対応する勾配値を記憶部107から読み出す。すなわち、記憶部107において記憶されている勾配履歴の中から、自車両の走行地点に関連付けられた勾配値を検索し、これを記憶部107より読み出す。こうして読み出した勾配値は、当該走行地点における勾配の推定結果として用いられる。
【0048】
現在の自車両の走行地点が過去の走行地点と一致する場合は、上記のようにしてステップS220の処理が実行されることにより、予め記憶部107に記憶された勾配履歴に基づいて、その走行地点の勾配が推定される。ステップS220を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0049】
ステップS230において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報に基づいて、自車両が立体駐車場内を走行中であるか否かを判定する。立体駐車場内を走行中である場合、すなわち自車両が立体駐車場内にいることを示す情報が取得した走行地点情報の中に含まれていた場合はステップS240へ進み、そうでない場合はステップS270へ進む。
【0050】
ステップS240において、第二勾配推定部105は、自車両が立体駐車場から退出中であるか否かを判定する。この判定は、たとえば、前述の進入フラグが設定されているか否かによって行うことができる。すなわち、図3のステップS110による進入フラグの解除がまだ行われておらず、進入フラグが設定された状態のままである場合は、自車両が立体駐車場内へ進入中であり、退出中ではないと判定する。この場合、ステップS270へ進む。一方、設定された進入フラグが図3のステップS110において既に解除されている場合は、自車両が立体駐車場から退出中であると判定する。この場合、ステップS250へ進む。なお、上記で説明した以外の方法によって自車両が立体駐車場から退出中であるか否かを判定してもよい。たとえば、立体駐車場内における自車両の走行軌跡に基づいて判定したり、立体駐車場に設けられた出口ゲートの通過を検出することで判定したりしてもよい。
【0051】
ステップS250において、第二勾配推定部105は、図3のステップS90で記憶された進入勾配値を記憶部107から読み出す。ここでは、当該立体駐車場について記憶部107に記憶されている進入勾配値のうち、その立体駐車場内における自車両の位置に対応する進入勾配値を読み出すようにする。
【0052】
ステップS260において、第二勾配推定部105は、ステップS250で記憶部107から読み出した進入勾配値に基づいて、自車両が当該立体駐車場から退出するときの勾配値である退出勾配値を算出する。すなわち、立体駐車場からの退出時は、進入時とは反対向きに自車両が走行していると考えられるため、読み出した進入勾配値の符号を反転させることにより、退出勾配値を算出する。
【0053】
自車両が立体駐車場から退出する場合は、上記のようにしてステップS250およびS260の処理が実行されることにより、記憶部107に予め記憶された進入勾配値に基づいて、自車両の走行地点の勾配としての退出勾配値が推定される。ステップS260を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0054】
ステップS270において、第二勾配推定部105は、図3のステップS10で取得した走行地点情報に基づいて、自車両の走行地点付近におけるマップマッチングの精度が所定の基準を満たすか否かを判定する。この判定は、たとえば、自車両の走行地点を含む道路区間の形状に基づいて行うことができる。すなわち、自車両の走行地点付近の道路区間がマップマッチングに適した形状、たとえばカーブやクランク状の特徴的な形状を有する場合には、マップマッチングの精度が所定の基準を満たすと判定する。この場合、ステップS280へ進む。一方、自車両の走行地点付近の道路区間が直線状などのマップマッチングが困難な形状である場合は、マップマッチングの精度が所定の基準を満たさないと判定する。この場合、ステップS320へ進む。
【0055】
なお、上述した以外の方法によりステップS270の判定を行ってもよい。たとえば、GPS信号の受信状態、道路上の特定の位置において車両に送信される情報(ビーコンからのVICS情報、ETC(Electronic Toll Collection System)の料金所アンテナからの送信情報等)の受信状態、車載カメラによる撮像画像などに基づいて、自車両の走行地点付近におけるマップマッチングの精度を判断し、ステップS270の判定を行うことができる。
【0056】
ステップS280において、第二勾配推定部105は、自車両の車速に基づく実走行距離を算出する。すなわち、車両情報取得部101により車両情報の一部として取得された自車両の車速に基づいて、所定の道路区間を走行したときの自車両の実走行距離を算出する。なお、ここで実走行距離の算出対象とする道路区間は、ステップS270においてマップマッチング精度が基準を満たすと判定された道路区間と一致するか、少なくとも当該道路区間に含まれていることが好ましい。
【0057】
ステップS290において、第二勾配推定部105は、ステップS280で実走行距離を算出した道路区間について、地図上の走行距離を算出する。ここでは、HDD13に記録されている地図データに基づいて、当該道路区間の地図上の距離、すなわち当該道路区間に対応するリンクの長さを求めることにより、地図上の走行距離を算出する。
【0058】
ステップS300において、第二勾配推定部105は、実走行距離と地図上の走行距離との間における距離差を算出する。ここでは、ステップS280で算出した実走行距離と、ステップS290で算出した地図上の走行距離との差分を求めることで、これらの距離差を算出することができる。
【0059】
ステップS310において、第二勾配推定部105は、ステップS300で算出した距離差に基づいて、自車両の走行地点における勾配値を算出する。すなわち、ステップS290で算出した地図上の走行距離は、勾配が0であるときの理論的な走行距離を表しているため、これと実走行距離との差から、走行地点における実際の勾配値を求めることができる。具体的には、実走行距離をR1、地図上の走行距離をR2、勾配値をθとすると、以下の式(1)により勾配値θを求めることができる。
θ=cos−1(R1/R2) ・・・(1)
【0060】
自車両の走行地点付近におけるマップマッチングの精度が所定の基準を満たす場合は、上記のようにしてステップS280〜S310の処理が実行されることにより、HDD13に予め記憶された地図データに基づいて、自車両の走行地点の勾配が推定される。ステップS310を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0061】
ステップS320において、第二勾配推定部105は、高度情報取得部102によって高精度の高度情報を取得可能であるか否かを判定する。この判定は、たとえば、高度情報として取得された気圧センサ12からの気圧信号やGPS受信部14からのGPS信号の精度が所定の水準を満たすか否かを判断することによって行われる。すなわち、気圧信号によって示された大気圧の変動が自車両の運動状態に応じた所定の範囲内である場合や、GPS信号を安定的に受信可能な状況である場合は、高精度の高度情報を取得可能であると判定してステップS330へ進む。一方、気圧信号によって示された大気圧の変動が所定範囲を超える場合や、GPS信号が受信可能でない状況、たとえばトンネル内や屋内を自車両が走行しているような状況の場合には、高精度の高度情報を取得可能でないと判定してステップS340へ進む。なお、これ以外の方法により高精度の高度情報を取得可能であるか否かを判定することとしてもよい。
【0062】
ステップS330において、第二勾配推定部105は、高度情報取得部102により取得された高度情報に基づいて、自車両の走行地点における勾配値を算出する。すなわち、所定時間内における自車両の高度変化量を高度情報から求め、その高度変化量と自車両の走行距離との関係から、自車両の走行地点における勾配値を算出する。
【0063】
高精度の高度情報を取得可能である場合は、上記のようにしてステップS330の処理が実行されることにより、取得された高度情報に基づいて自車両の走行地点の高度が求められ、これに基づいて自車両の走行地点の勾配が推定される。ステップS330を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0064】
ステップS340において、第二勾配推定部105は、ブレーキ前勾配値、すなわち図3のステップS40でブレーキがオンであると判定される直前の勾配値を、記憶部107から読み出す。なお、ここで読み出されるブレーキ前勾配値は、ステップS40でブレーキがオンであると判定される直前に、図3のステップS70において第一勾配推定部104により推定され、ステップS90またはS120において記憶部107に記憶された勾配値である。こうして読み出したブレーキ前勾配値は、当該走行地点における勾配の推定結果として用いられる。
【0065】
前述のステップS210〜S330で説明したようないずれの方法でも走行地点の勾配が推定できないような場合は、ステップS340の処理が実行されることにより、予め記憶部107に記憶されたブレーキ前勾配値に基づいて、その走行地点の勾配が推定される。ステップS340を実行したら、第二勾配推定部105はブレーキ中勾配推定処理を終了し、図3のステップS80へ進む。
【0066】
以上説明した実施の形態によれば、次の作用効果を奏する。
【0067】
(1)ナビゲーション装置1は、勾配推定部100において、第一勾配推定部104により自車両の走行地点の勾配を推定すると共に、第一勾配推定部104とは異なる方法で、第二勾配推定部105により自車両の走行地点の勾配を推定する。そして、自車両のブレーキが運転者によって操作されたか否かを判定し、その判定結果に応じて、選択部106により、第一勾配推定部104または第二勾配推定部105のいずれかを選択する。すなわち、自車両のブレーキが操作されていないと判定されたときには第一勾配推定部104を選択し、自車両のブレーキが操作されたと判定されたときには第二勾配推定部105を選択する。こうして選択された第一勾配推定部104または第二勾配推定部105を用いて、自車両の走行地点の勾配を推定することとした。このようにしたので、自車両がブレーキング中であっても正しい勾配を推定できる。
【0068】
(2)勾配推定部100において、車両情報取得部101は、自車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得する。第一勾配推定部104は、こうして車両情報取得部101により取得された車両情報に基づいて、自車両の走行地点の勾配を推定する。一方、第二勾配推定部105は、この車両情報以外の情報に基づいて、自車両の走行地点の勾配を推定する。このようにしたので、自車両がブレーキング中でないときの勾配とブレーキング中の勾配とをそれぞれ正確に推定することができる。
【0069】
(3)第二勾配推定部105は、車両情報以外の情報として、自車両の走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つに基づいて、自車両の走行地点の勾配を推定することができる。したがって、状況に応じて最適な方法を用いて、自車両がブレーキング中の勾配を推定することができる。
【0070】
(4)自車両の走行地点の高度に基づく勾配推定において、第二勾配推定部105は、高度情報取得部102により取得された高度情報に基づいて、自車両の走行地点の勾配を推定する(ステップS330)。このようにしたので、自車両の走行地点の高度に基づいてブレーキング中の勾配を正確に推定することができる。
【0071】
(5)予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、自車両が立体駐車場に進入したか否かを判定し(ステップS20)、進入したと判定されたときに、ステップS70で第一勾配推定部104により推定された勾配、またはステップS60で第二勾配推定部105により推定された勾配を、進入勾配値として記憶部107に記憶する(ステップS90)。そして、第二勾配推定部105により、自車両が当該立体駐車場から退出中であるか否かを判定し(ステップS240)、退出中であると判定されたときに、ステップS90で記憶部107に記憶された進入勾配値に基づいて、自車両の走行地点の勾配を推定する(ステップS250、S260)。このようにしたので、自車両が立体駐車場を退出する際のブレーキング中の勾配を正確に推定することができる。
【0072】
(6)予め記憶された地図データに基づく勾配推定において、第二勾配推定部105は、所定の道路区間における自車両の実走行距離を算出し(ステップS280)、さらに、予め記憶された地図データに基づいて当該道路区間における自車両の地図上の走行距離を算出する(ステップS290)。こうして算出された実走行距離と地図上の走行距離との差分を算出し(ステップS300)、この差分に基づいて、自車両の走行地点の勾配を推定する(ステップS310)。このようにしたので、実走行距離と地図上の走行距離との間に差がある場合に、自車両がブレーキング中の勾配を正確に推定することができる。
【0073】
(7)なお、上記(6)の勾配推定を行う場合、第二勾配推定部105は、自車両の走行地点を少なくとも含む道路区間に対してマップマッチング精度が所定の基準を満たすか否かを判定する(ステップS270)。この判定によってマップマッチング精度が基準を満たすと判定された道路区間について、ステップS280およびS290において実走行距離および地図上の走行距離をそれぞれ算出して、自車両の走行地点の勾配を推定するようにした。このようにしたので、マップマッチング精度が低いために自車両の地図上の走行距離が正しく算出できないような状況において、不正確な勾配値が誤って求められてしまうのを防ぐことができる。
【0074】
(8)また、予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、第一勾配推定部104または第二勾配推定部105により過去に推定された勾配とその勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶部107に記憶する(ステップS120)。そして、第二勾配推定部105により、記憶部107に記憶された勾配履歴に基づいて、現在の走行地点が過去の走行地点と一致するか否かを判定し(ステップS210)、一致すると判定されたときに、その勾配履歴に基づいて、自車両の走行地点の勾配を推定する(ステップS220)。このようにしたので、過去に自車両が走行したことのある場所においてブレーキング中の勾配を正確に推定することができる。
【0075】
(9)さらに、予め記憶された勾配値に基づく勾配推定において、勾配推定部100は、ステップS40で自車両のブレーキが操作されたと判定される直前に第一勾配推定部104により推定された勾配を、ブレーキ前勾配値として記憶部107に記憶する(ステップS90、S120)。そして、第二勾配推定部105により、ステップS90またはS120で記憶部107に記憶されたブレーキ前勾配値に基づいて、自車両の走行地点の勾配を推定する(ステップS340)。このようにしたので、上記(4)〜(8)のような勾配推定方法を用いることができない状況であっても、自車両がブレーキング中の勾配を正確に推定することができる。
【0076】
なお、以上説明した実施の形態では、上記(4)〜(9)で説明したいずれかの勾配推定方法を用いて、自車両がブレーキング中の勾配を推定することとした。すなわち、第二勾配推定部105において、高度情報取得部102により取得された高度情報、予め記憶部107に記憶された進入勾配値、実走行距離と地図上の走行距離との差分、予め記憶部107に記憶された勾配履歴、または予め記憶部107に記憶されたブレーキ前勾配値のいずれか少なくとも一つを勾配推定用情報として選択し、これに基づいて自車両の走行地点の勾配を推定するようにした。しかし、本発明では、これらの勾配推定方法を必ずしも全て適用する必要はなく、いずれか一つ以上の任意の勾配推定方法を選択的に適用してもよい。
【0077】
上記のように任意の勾配推定方法を選択的に適用する場合は、図3および4のフローチャートにおいて、適用外とした勾配推定方法に対応する処理を省略することができる。たとえば、(4)で述べた高度情報に基づく勾配推定方法を適用しない場合は、図4のフローチャートにおいて、ステップS320およびS330の各処理を省略することができる。また、(5)で述べた進入勾配値に基づく勾配推定方法を適用しない場合は、図3のフローチャートにおいて、ステップS20、S30、S80〜S110の各処理を省略できると共に、図4のフローチャートにおいて、ステップS230〜S260の各処理を省略することができる。これ以外の場合であっても同様に、適用外とした勾配推定方法に対応する処理を省略することができる。
【0078】
あるいは、複数の勾配推定方法を同時に用いて勾配推定を行い、得られた複数の勾配値に基づいて、自車両がブレーキング中の勾配を推定することとしてもよい。すなわち、上記(4)〜(9)で説明した勾配推定方法のうち、そのときの状況に応じて適用可能な一つまたは複数の勾配推定方法を選択し、それぞれの方法に従って勾配推定方法を行う。こうして推定された各勾配値の統計値、たとえば平均値や中央値などを用いて、自車両がブレーキング中の勾配を推定することができる。
【0079】
また、以上説明した実施の形態では、自車両の走行地点に対応する勾配値が記憶部107の勾配履歴において記録されていれば、ステップS210で現在の自車両の走行地点が過去の走行地点と一致すると判定し、その勾配値をステップS220で読み出すこととした。すなわち、過去に一度でも勾配値が推定された地点であれば、その勾配値を用いて自車両がブレーキング中の勾配を推定することとした。しかし、これを所定回数以上、たとえば10回以上勾配値の推定が行われた地点に限って行うこととしてもよい。
【0080】
以上説明した実施の形態において、自車両に対して垂直方向に加わる加速度を加速度センサにより検出し、その検出値に基づいてブレーキング中の勾配を推定するようにしてもよい。このようにすれば、ブレーキングによって自車両に生じる減速度の大きさに関わらず、勾配の大きさに応じた重力加速度を加速度センサによって検出し、ブレーキング中の勾配を推定することができる。
【0081】
上記実施の形態では、本発明による勾配推定をナビゲーション装置1において実現する例を説明したが、ナビゲーション装置以外の車載装置を用いてこれを実現してもよい。あるいは、ナビゲーション装置とは別個に設けられた勾配推定装置や情報端末を用いてこれを行ってもよい。
【0082】
以上説明した実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0083】
1:ナビゲーション装置、10:制御部、11:振動ジャイロ、12:気圧センサ、
13:HDD、14:GPS受信部、15:表示モニタ、16:入力装置、
100:勾配推定部、101:車両情報取得部、102:高度情報取得部、
103:走行地点情報取得部、104:第一勾配推定部、105:第二勾配推定部、
106:選択部、107:記憶部
【特許請求の範囲】
【請求項1】
第一の推定方法により車両の走行地点の勾配を推定する第一勾配推定手段と、
前記第一の推定方法とは異なる第二の推定方法により前記走行地点の勾配を推定する第二勾配推定手段と、
前記車両のブレーキが運転者によって操作されたか否かを判定するブレーキ判定手段と、
前記ブレーキ判定手段により前記車両のブレーキが操作されていないと判定されたときには前記第一勾配推定手段を選択し、前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定されたときには前記第二勾配推定手段を選択する推定方法選択手段とを備え、
前記選択手段により選択された前記第一勾配推定手段または前記第二勾配推定手段を用いて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項2】
請求項1に記載の車載勾配推定装置において、
前記車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得する車両情報取得手段をさらに備え、
前記第一勾配推定手段は、前記車両情報取得手段により取得された前記車両情報に基づいて前記走行地点の勾配を推定し、
前記第二勾配推定手段は、前記車両情報以外の情報に基づいて前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項3】
請求項2に記載の車載勾配推定装置において、
前記車両情報以外の情報は、前記走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つを含むことを特徴とする車載勾配推定装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載勾配推定装置において、
前記走行地点の高度に関する高度情報を取得する高度情報取得手段をさらに備え、
前記第二勾配推定手段は、前記高度情報取得手段により取得された前記高度情報に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車載勾配推定装置において、
前記車両が立体駐車場に進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が立体駐車場に進入したと判定されたときに、前記第一勾配推定手段または前記第二勾配推定手段により推定された前記走行地点の勾配を進入勾配値として記憶する第一記憶手段と、
前記車両が前記立体駐車場から退出中であるか否かを判定する退出判定手段とをさらに備え、
前記第二勾配推定手段は、前記退出判定手段により前記車両が前記立体駐車場から退出中であると判定されたときに、前記第一記憶手段に記憶された前記進入勾配値に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項6】
請求項1〜5のいずれか一項に記載の車載勾配推定装置において、
所定の道路区間における前記車両の実走行距離を算出する実走行距離算出手段と、
予め記憶された地図データに基づいて前記道路区間における前記車両の地図上の走行距離を算出する地図走行距離算出手段と、
前記実走行距離と前記地図上の走行距離との差分を算出する差分算出手段とをさらに備え、
前記第二勾配推定手段は、前記差分算出手段により算出された前記差分に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項7】
請求項6に記載の車載勾配推定装置において、
前記走行地点を少なくとも含む道路区間に対してマップマッチング精度が所定の基準を満たすか否かを判定するマッチング精度判定手段をさらに備え、
前記実走行距離算出手段および前記地図走行距離算出手段は、前記マッチング精度判定手段により前記マップマッチング精度が前記基準を満たすと判定された道路区間について、前記実走行距離および前記地図上の走行距離をそれぞれ算出することを特徴とする車載勾配推定装置。
【請求項8】
請求項1〜7のいずれか一項に記載の車載勾配推定装置において、
前記第一勾配推定手段または前記第二勾配推定手段により過去に推定された勾配と該勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶する第二記憶手段と、
前記第二記憶手段に記憶された前記勾配履歴に基づいて、現在の走行地点が過去の走行地点と一致するか否かを判定する一致判定手段とをさらに備え、
前記第二勾配推定手段は、前記一致判定手段により現在の走行地点が過去の走行地点と一致すると判定されたときに、前記第二記憶手段に記憶された前記勾配履歴に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項9】
請求項1〜8のいずれか一項に記載の車載勾配推定装置において、
前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定される直前に前記第一勾配推定手段によって推定された前記走行地点の勾配をブレーキ前勾配値として記憶する第三記憶手段をさらに備え、
前記第二勾配推定手段は、前記第三記憶手段に記憶された前記ブレーキ前勾配値に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項10】
請求項1〜3のいずれか一項に記載の車載勾配推定装置において、
前記走行地点の高度に関する高度情報を取得する高度情報取得手段と、
前記車両が立体駐車場に進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が立体駐車場に進入したと判定されたときに、前記第一勾配推定手段または前記第二勾配推定手段により推定された前記走行地点の勾配を進入勾配値として記憶する第一記憶手段と、
所定の道路区間における前記車両の実走行距離を算出する実走行距離算出手段と、
予め記憶された地図データに基づいて前記道路区間における前記車両の地図上の走行距離を算出する地図走行距離算出手段と、
前記実走行距離と前記地図上の走行距離との差分を算出する差分算出手段と、
前記第一勾配推定手段または前記第二勾配推定手段により過去に推定された勾配と該勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶する第二記憶手段と、
前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定される直前に前記第一勾配推定手段によって推定された前記走行地点の勾配をブレーキ前勾配値として記憶する第三記憶手段と、
前記高度情報、前記進入勾配値、前記差分、前記勾配履歴または前記ブレーキ前勾配値のいずれか少なくとも一つを勾配推定用情報として選択する勾配推定用情報選択手段とをさらに備え、
前記第二勾配推定手段は、前記勾配推定用情報選択手段により選択された前記勾配推定用情報に基づいて前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項11】
請求項10に記載の車載勾配推定装置において、
前記勾配推定用情報選択手段は、
前記車両が前記立体駐車場から退出中であるときには、前記進入勾配値を前記勾配推定用情報として選択し、
前記道路区間におけるマップマッチング精度が所定の基準を満たすときには、前記差分を前記勾配推定用情報として選択し、
現在の走行地点が過去の走行地点と一致するときには、前記勾配履歴を前記勾配推定用情報として選択することを特徴とする車載勾配推定装置。
【請求項12】
車両に搭載された情報端末により前記車両の走行地点の勾配を推定する方法であって、
前記情報端末により、前記車両のブレーキが運転者によって操作されたか否かに応じて、第一の推定方法、または前記第一の推定方法とは異なる第二の推定方法のいずれか一方を選択し、
前記情報端末により、前記選択された前記第一の推定方法または前記第二の推定方法を用いて、前記走行地点の勾配を推定することを特徴とする勾配推定方法。
【請求項13】
請求項12に記載の勾配推定方法において、
前記情報端末により、前記車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得し、
前記情報端末により、前記第一の推定方法が選択された場合は前記車両情報に基づいて前記走行地点の勾配を推定し、前記第二の推定方法が選択された場合は前記車両情報以外の情報に基づいて前記走行地点の勾配を推定することを特徴とする勾配推定方法。
【請求項14】
請求項13に記載の勾配推定方法において、
前記車両情報以外の情報は、前記走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つを含むことを特徴とする勾配推定方法。
【請求項1】
第一の推定方法により車両の走行地点の勾配を推定する第一勾配推定手段と、
前記第一の推定方法とは異なる第二の推定方法により前記走行地点の勾配を推定する第二勾配推定手段と、
前記車両のブレーキが運転者によって操作されたか否かを判定するブレーキ判定手段と、
前記ブレーキ判定手段により前記車両のブレーキが操作されていないと判定されたときには前記第一勾配推定手段を選択し、前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定されたときには前記第二勾配推定手段を選択する推定方法選択手段とを備え、
前記選択手段により選択された前記第一勾配推定手段または前記第二勾配推定手段を用いて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項2】
請求項1に記載の車載勾配推定装置において、
前記車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得する車両情報取得手段をさらに備え、
前記第一勾配推定手段は、前記車両情報取得手段により取得された前記車両情報に基づいて前記走行地点の勾配を推定し、
前記第二勾配推定手段は、前記車両情報以外の情報に基づいて前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項3】
請求項2に記載の車載勾配推定装置において、
前記車両情報以外の情報は、前記走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つを含むことを特徴とする車載勾配推定装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載勾配推定装置において、
前記走行地点の高度に関する高度情報を取得する高度情報取得手段をさらに備え、
前記第二勾配推定手段は、前記高度情報取得手段により取得された前記高度情報に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車載勾配推定装置において、
前記車両が立体駐車場に進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が立体駐車場に進入したと判定されたときに、前記第一勾配推定手段または前記第二勾配推定手段により推定された前記走行地点の勾配を進入勾配値として記憶する第一記憶手段と、
前記車両が前記立体駐車場から退出中であるか否かを判定する退出判定手段とをさらに備え、
前記第二勾配推定手段は、前記退出判定手段により前記車両が前記立体駐車場から退出中であると判定されたときに、前記第一記憶手段に記憶された前記進入勾配値に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項6】
請求項1〜5のいずれか一項に記載の車載勾配推定装置において、
所定の道路区間における前記車両の実走行距離を算出する実走行距離算出手段と、
予め記憶された地図データに基づいて前記道路区間における前記車両の地図上の走行距離を算出する地図走行距離算出手段と、
前記実走行距離と前記地図上の走行距離との差分を算出する差分算出手段とをさらに備え、
前記第二勾配推定手段は、前記差分算出手段により算出された前記差分に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項7】
請求項6に記載の車載勾配推定装置において、
前記走行地点を少なくとも含む道路区間に対してマップマッチング精度が所定の基準を満たすか否かを判定するマッチング精度判定手段をさらに備え、
前記実走行距離算出手段および前記地図走行距離算出手段は、前記マッチング精度判定手段により前記マップマッチング精度が前記基準を満たすと判定された道路区間について、前記実走行距離および前記地図上の走行距離をそれぞれ算出することを特徴とする車載勾配推定装置。
【請求項8】
請求項1〜7のいずれか一項に記載の車載勾配推定装置において、
前記第一勾配推定手段または前記第二勾配推定手段により過去に推定された勾配と該勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶する第二記憶手段と、
前記第二記憶手段に記憶された前記勾配履歴に基づいて、現在の走行地点が過去の走行地点と一致するか否かを判定する一致判定手段とをさらに備え、
前記第二勾配推定手段は、前記一致判定手段により現在の走行地点が過去の走行地点と一致すると判定されたときに、前記第二記憶手段に記憶された前記勾配履歴に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項9】
請求項1〜8のいずれか一項に記載の車載勾配推定装置において、
前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定される直前に前記第一勾配推定手段によって推定された前記走行地点の勾配をブレーキ前勾配値として記憶する第三記憶手段をさらに備え、
前記第二勾配推定手段は、前記第三記憶手段に記憶された前記ブレーキ前勾配値に基づいて、前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項10】
請求項1〜3のいずれか一項に記載の車載勾配推定装置において、
前記走行地点の高度に関する高度情報を取得する高度情報取得手段と、
前記車両が立体駐車場に進入したか否かを判定する進入判定手段と、
前記進入判定手段により前記車両が立体駐車場に進入したと判定されたときに、前記第一勾配推定手段または前記第二勾配推定手段により推定された前記走行地点の勾配を進入勾配値として記憶する第一記憶手段と、
所定の道路区間における前記車両の実走行距離を算出する実走行距離算出手段と、
予め記憶された地図データに基づいて前記道路区間における前記車両の地図上の走行距離を算出する地図走行距離算出手段と、
前記実走行距離と前記地図上の走行距離との差分を算出する差分算出手段と、
前記第一勾配推定手段または前記第二勾配推定手段により過去に推定された勾配と該勾配に対応する走行地点とを互いに関連付けた勾配履歴を記憶する第二記憶手段と、
前記ブレーキ判定手段により前記車両のブレーキが操作されたと判定される直前に前記第一勾配推定手段によって推定された前記走行地点の勾配をブレーキ前勾配値として記憶する第三記憶手段と、
前記高度情報、前記進入勾配値、前記差分、前記勾配履歴または前記ブレーキ前勾配値のいずれか少なくとも一つを勾配推定用情報として選択する勾配推定用情報選択手段とをさらに備え、
前記第二勾配推定手段は、前記勾配推定用情報選択手段により選択された前記勾配推定用情報に基づいて前記走行地点の勾配を推定することを特徴とする車載勾配推定装置。
【請求項11】
請求項10に記載の車載勾配推定装置において、
前記勾配推定用情報選択手段は、
前記車両が前記立体駐車場から退出中であるときには、前記進入勾配値を前記勾配推定用情報として選択し、
前記道路区間におけるマップマッチング精度が所定の基準を満たすときには、前記差分を前記勾配推定用情報として選択し、
現在の走行地点が過去の走行地点と一致するときには、前記勾配履歴を前記勾配推定用情報として選択することを特徴とする車載勾配推定装置。
【請求項12】
車両に搭載された情報端末により前記車両の走行地点の勾配を推定する方法であって、
前記情報端末により、前記車両のブレーキが運転者によって操作されたか否かに応じて、第一の推定方法、または前記第一の推定方法とは異なる第二の推定方法のいずれか一方を選択し、
前記情報端末により、前記選択された前記第一の推定方法または前記第二の推定方法を用いて、前記走行地点の勾配を推定することを特徴とする勾配推定方法。
【請求項13】
請求項12に記載の勾配推定方法において、
前記情報端末により、前記車両の駆動トルク、走行速度および重量を少なくとも含む車両情報を取得し、
前記情報端末により、前記第一の推定方法が選択された場合は前記車両情報に基づいて前記走行地点の勾配を推定し、前記第二の推定方法が選択された場合は前記車両情報以外の情報に基づいて前記走行地点の勾配を推定することを特徴とする勾配推定方法。
【請求項14】
請求項13に記載の勾配推定方法において、
前記車両情報以外の情報は、前記走行地点の高度、予め記憶された勾配値、および予め記憶された地図データのいずれか少なくとも一つを含むことを特徴とする勾配推定方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−235695(P2011−235695A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−107262(P2010−107262)
【出願日】平成22年5月7日(2010.5.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月7日(2010.5.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]