
車載器及び走行ルート確認システム

【課題】積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができる車載器を提供する。
【解決手段】大型車両65が、事務所から位置コンテンションである交差点A、B、Cを順に経由して目的地まで走行する指定ルートが車載器10に設定されている。例えば、交差点Aから、交差点Bを経由することなく、交差点Cに到達した場合、指定外ルートを走行したとして、車載器10から事務所側のPC50に指定外ルートのデータがネットワーク45経由で送信される。
【解決手段】大型車両65が、事務所から位置コンテンションである交差点A、B、Cを順に経由して目的地まで走行する指定ルートが車載器10に設定されている。例えば、交差点Aから、交差点Bを経由することなく、交差点Cに到達した場合、指定外ルートを走行したとして、車載器10から事務所側のPC50に指定外ルートのデータがネットワーク45経由で送信される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載された車載器及び走行ルート確認システムに関する。
【背景技術】
【0002】
従来、特殊車両など、高さ指定、重さ指定に該当する車両等が公道を走行する場合、あらかじめ申請し、受理された指定の走行ルート(経路)で走行しなければならない。
【0003】
また、重さ指定の車両の重量は、積載量に車重を加えたものであるので、積載がなくても車重が制限値を超える場合、指定の走行ルートで走行しなければならない。
【0004】
この種の先行技術として、車両の積載重量を走行中に測定できる自重計機能付きナビゲーション装置が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−19939号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の車載器では、つぎのような問題があった。車両の総重量が制限値を超える場合、申請して受理された指定の走行ルートで走行しなければならなくても、実際に、重さ指定に該当する車両が指定の走行ルートを走行しているのか否か、車両を管理する事務所側ではわからなかった。
【0007】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができる車載器及び走行ルート確認システムを提供することにある。
【課題を解決するための手段】
【0008】
前述した目的を達成するために、本発明に係る車載器は、下記(1)〜(5)を特徴としている。
(1) 車両に搭載された車載器であって、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と、
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信する
こと。
(2) 上記(1)の構成の車載器であって、
前記検知手段によって前記車両が積載中であることが検知されない場合、前記通信手段は前記外れたルートを前記外部の機器に送信しない
こと。
(3) 上記(1)または(2)の構成の車載器であって、
前記指定の走行ルートに、あらかじめ決められた順番で通過するための複数の通過点を設定する設定手段と、
前記車両の現在地を取得する取得手段と
をさらに備え、
前記判別手段が、前記通過点を通過する際、前記取得手段によって取得される前記車両の現在地の順番が前記あらかじめ決められた順番と異なると判別した場合、前記通信手段は、前記外れたルートを送信する
こと。
(4) 上記(3)の構成の車載器であって、
前記通信手段は、前記外れたルートとして、前記順番が合っていると判別された前記通過点から前記車両の現在地までのルートを送信する
こと。
(5) 上記(1)から(4)のいずれか1つの構成の車載器であって、
前記車両の積載荷重を検出する荷重検出手段を
さらに備え、
前記荷重検出手段によって検出された積載荷重に前記車両の重量を加えた総重量が制限値を超える場合、前記検知手段は、前記車両が積載中であることを検知する
こと。
【0009】
前述した目的を達成するために、本発明に係る走行ルート確認システムは、下記(6)または(7)を特徴としている。
(6) 車両に搭載された車載器、および前記車載器と通信可能な外部の機器を備え、前記車両の走行ルートを確認する走行ルート確認システムであって、
前記車載器は、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信し、
前記外部の機器は、
前記通信手段によって送信された前記外れたルートを受信する受信手段と、
前記受信手段によって受信した前記外れたルートを表示する表示手段と
を備える
こと。
(7) 上記(6)の構成の走行ルート確認システムであって、
前記外部の機器は、
地図が記憶された地図記憶手段を
さらに備え、
前記表示手段は、前記地図記憶手段に記憶された地図を表示し、前記地図上に前記外れたルートを表示する
こと。
【発明の効果】
【0010】
本発明の車載器及び走行ルート確認システムによれば、車両が積載中であることが検知されている期間に、指定の走行ルートから外れたルートを車両が走行したことが判別された場合、外れたルートを外部の機器に送信する。これにより、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができる。
【0011】
また、積載が無い、あるいは積載量が少なく、車両の総重量が制限値を超えない場合、指定の走行ルートに制限されることなく走行可能であるので、車両は効率的に運行することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施の形態における車載器10を含む走行ルート確認システム1の構成を示す図である。
【図2】図2は、車載器10の筐体前面を示す図である。
【図3】図3は、走行ルート確認システム1の動作の概要を示す図である。
【図4】図4は、車載器10の動作手順を示すフローチャートである。
【図5】図5は、事務所側PC50の動作手順を示すフローチャートである。
【図6】図6は、事務所側PC50の表示器52の画面に表示された指定外ルートを示す図である。
【発明を実施するための形態】
【0013】
本発明の実施の形態における車載器及び走行ルート確認システムについて図面を用いて説明する。本実施形態の車載器は、特殊車両など重さ指定された車両に搭載されたカーナビゲーション装置に適用される。
【0014】
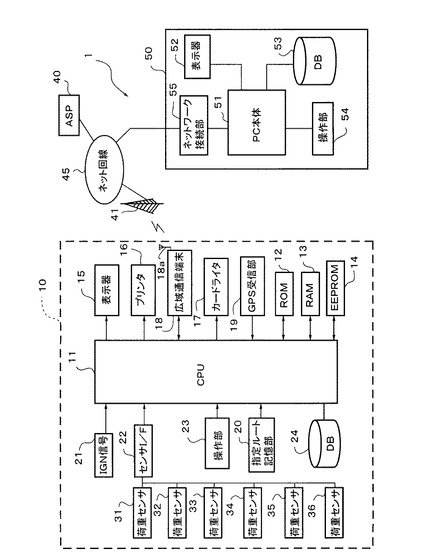
図1は実施の形態における車載器10を含む走行ルート確認システム1の構成を示す図である。走行ルート確認システム1は、大型の車両65(図3参照)に搭載された車載器10、および事務所に設置され、車両を管理するコンピュータ装置(PC)50から構成される。また、車載器10とPC50は、インターネット等のネットワーク45への接続サービスを行うアプリケーションサービスプロバイダ(ASP)40を介して、通信可能である。
【0015】
車載器10は、前述したようにカーナビゲーション装置であり、CPU11、ROM12、RAM13、EEPROM14、表示器15、プリンタ16、カードライタ17、広域通信端末18およびGPS受信部19を有する。また、車載器10は、指定ルート記憶部20、操作部23、地図情報データベース(DB)24、イグニッション(IGN)信号入力部21、およびセンサインタフェース(I/F)22を有する。
【0016】
表示器15は、指定の走行ルート(単に指定ルートともいう)、通過点となる交差点などが記された地図などを表示する。プリンタ16は各種の印刷を行う。カードライタ17はカードに各種のデータを記録する。
【0017】
広域通信端末18は、アンテナ18aを有し、このアンテナ18aおよび無線基地局41を介してネットワーク45に接続され、ASP40を通じて事務所側のPC50と通信を行う。GPS受信部19は、人工衛星から電波を受信し、車両の現在位置(現在地)を取得する。
【0018】
指定ルート記憶部20には、申請して受理された指定の走行ルート(指定ルート)が記憶される。この指定ルートは、車両の乗務員などが操作部23から入力されてもよいし、事務所側のPC50から受信してもよい。
【0019】
IGN信号入力部21には、イグニッションキーのオン信号が入力される。センサI/F22には、車両65に搭載され、車両各部の積載荷重を検出する荷重センサ31、32、33、34、35、36(荷重検出手段)が接続されている。操作部23は、表示器15の画面に設けられたタッチパネルや各種キーからなる。地図情報データベース24には、地図データが記憶されている。
【0020】
一方、事務所側のPC50は、PC本体51、表示器52、データベース53、操作部54およびネットワーク接続部55を有する。PC本体51は、周知のCPU、ROM、RAMなどを有する汎用のコンピュータであり、後述する動作プログラムを実行する。表示器52は、車載器10から送られる、後述する指定外ルートのデータを、画面に表示された地図に重ねて表示する。
【0021】
データベース53には、管理する車両の情報や地図データなどが登録されている(地図記憶手段)。操作部54はマウスやキーボードなどのデバイスである。ネットワーク接続部55は、ネットワーク45に接続され、ASP40を通じて車載器10と通信を行う。
【0022】
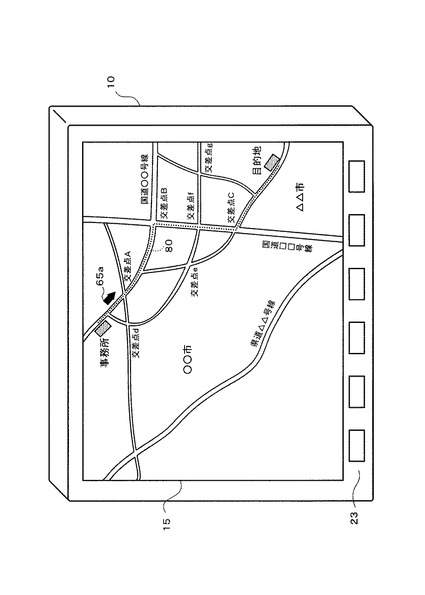
図2は車載器10の筐体前面を示す図である。車載器10の筐体前面には、表示器15および操作部23が設けられている。表示器15の画面には、事務所から目的地までの指定ルート80(図中、点線)や、ナビゲーションされる車両65の位置を表すマーク65aが地図上に表示されている。この指定ルート80では、車両は交差点A、交差点B、交差点Cの優先順位に従って走行しなければいけないことが示されている。
【0023】
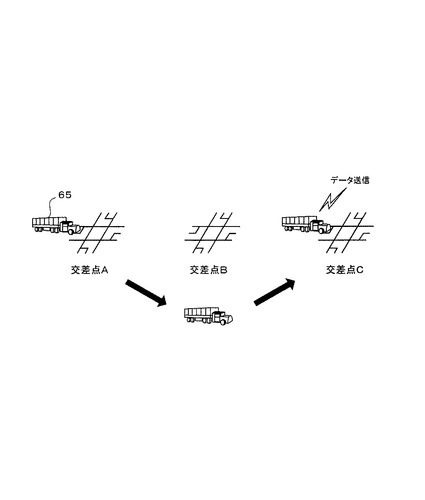
上記構成を有する走行ルート確認システムの動作を示す。図3は走行ルート確認システム1の動作の概要を示す図である。ここでは、大型の車両65が、事務所から位置コンテンションとして設定された複数の通過点である交差点A、B、Cを順に経由して目的地まで走行するように、指定された走行ルート(指定ルート)が車載器10に設定されている。GPS受信部19により取得される車両65の現在地があらかじめ登録された位置コンテンションに達した場合、車載器10は、現在地、現在時刻、積載荷重等のデータをRAM13に記憶する。
【0024】
位置コンテンションとして、交差点A、B、Cの他、交差点d、e、f、gが登録されている(図2参照)。車両が位置コンテンションに達した場合、現在地のデータが記録されることで、交差点A、B、Cを順番どおりの優先順位で通過したか否かが判断される。
【0025】
例えば、交差点Aから、交差点Bを経由することなく、交差点Cに到達した場合、指定ルートから外れ、指定外ルートを走行したとして、図3に示すように、車載器10から事務所側PC50に指定外ルートのデータがネットワーク45経由で送信される。
【0026】
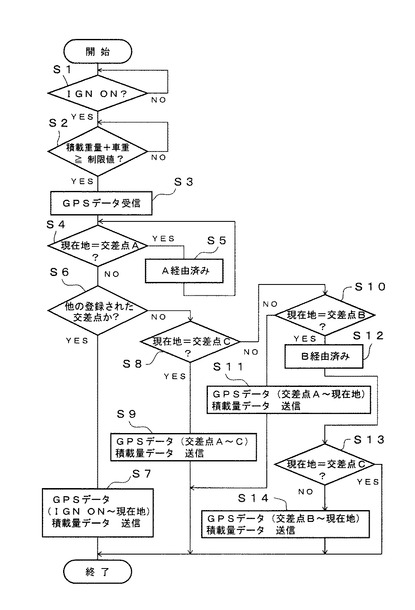
図4は車載器10の動作手順を示すフローチャートである。この動作プログラムは、ROM12に格納されており、CPU11によって実行される。CPU11は、IGN信号入力部21からイグニッションON信号が入力されるまで待つ(ステップS1)。
【0027】
イグニッションON信号が入力されると、CPU11は、センサI/F22を介して入力される荷重センサ31〜36で積載荷重を検出し、車両の総重量(積載量+車重)が制限値を超えるか否かを判別する(ステップS2)。ここで、車両の総重量が制限値を超えない場合、車両65は積載中でないと判別される。車両の総重量が制限値を超えない場合、CPU11はステップS2の処理を繰り返す。これにより、車両が積載中である期間に限り、これ以降、指定外ルートの走行の有無が判断されることになる。なお、このステップS2の処理は検知手段に相当する。
【0028】
一方、車両の総重量が制限値を超えた場合、CPU11は、GPS受信部19によりGPSデータを受信して車両の現在地の取得を開始する(ステップS3)。なお、このとき取得される車両の現在地が位置コンテンションでない場合、現在地のデータは単に記録され、つぎの位置コンテンションに達するまで現在地のデータは繰り返し取得される。
【0029】
CPU11は、車両の現在地が、指定ルート記憶部20にあらかじめ登録されている位置コンテンションである交差点Aに位置しているか否かを判別する(ステップS4)。交差点Aに位置している場合、CPU11は、交差点Aを経由済みに設定し(ステップS5)、ステップS4の処理に戻る。
【0030】
一方、交差点Aに位置していない場合、CPU11は、交差点Aを経由済みでなく、他の交差点に位置しているか否かを判別する(ステップS6)。交差点Aを経由済みでなく、他の交差点に位置している場合、CPU11は、イグニッションON信号が入力されてから現在地までのGPSデータ、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS7)。この後、CPU11は本動作を終了する。
【0031】
一方、ステップS6で交差点Aを経由済みである場合、CPU11は、現在地が位置コンテンションである交差点Cに位置しているか否かを判別する(ステップS8)。現在地が交差点Cに位置している場合、CPU11は、交差点Aから交差点CまでのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS9)。この後、CPU11は本動作を終了する。
【0032】
一方、ステップS8で交差点Cに位置していない場合、CPU11は、現在地が位置コンテンションである交差点Bに位置しているか否かを判別する(ステップS10)。交差点Bに位置していない場合、CPU11は、交差点Aから現在地までのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS11)。この後、CPU11は本動作を終了する。
【0033】
一方、ステップS10で交差点Bに位置している場合、CPU11は、交差点Bを経由済みに設定する(ステップS12)。そして、CPU11は、つぎに取得したGPSデータをもとに、現在地が位置コンテンションである交差点Cに位置するか否かを判別する(ステップS13)。交差点Cに位置しない場合、CPU11は、交差点Bから現在地までのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS14)。この後、CPU11は本動作を終了する。一方、ステップS13で交差点Cに位置する場合、指定された走行ルートを正常に走行したとして、CPU11は本動作を終了する。
【0034】
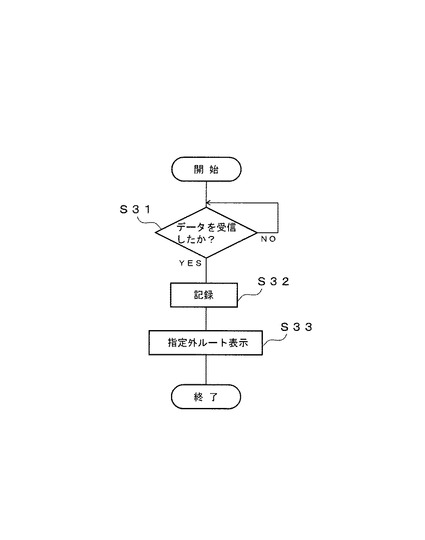
図5は事務所側PC50の動作手順を示すフローチャートである。この動作プログラムは、PC本体51内の記憶媒体に格納されており、PC本体51内のCPUによって実行される。
【0035】
PC50は、ASP40およびネットワーク接続部55を介して車載器10から送信されたデータ(指定外ルートのデータおよび積載量データ)を受信するまで待つ(ステップS31)。データを受信すると、PC50はそのデータをデータベース53に記録する(ステップS32)。さらに、PC50は、データベース53に登録された地図データを読み出し、指定外ルートが重なるように記された地図を表示器52に表示する(ステップS33)。この後、CPU11は本動作を終了する。
【0036】
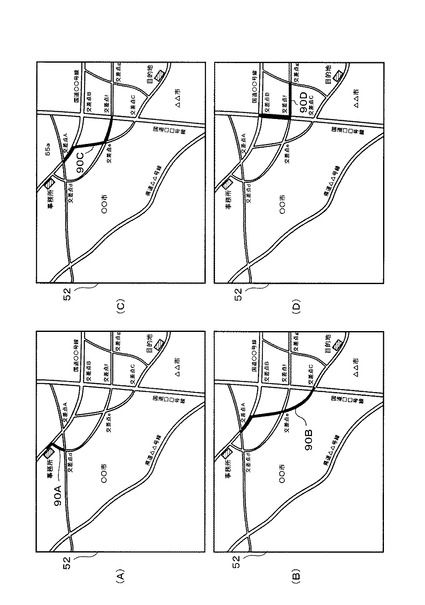
図6は事務所側PC50の表示器52の画面に表示された指定外ルートを示す図である。図6(A)では、ステップS7で送信された指定外ルート90Aが地図上に表示されている。この場合、指定外ルートは事務所から交差点dまでのルートである。図6(B)では、ステップS9で送信された指定外ルート90Bが地図上に表示されている。この場合、指定外ルートは交差点Aから交差点Cまでのルートである。図6(C)では、ステップS11で送信された指定外ルート90Cが地図上に表示されている。この場合、指定外ルートは、交差点Aから交差点fまでのルートである。図6(D)では、ステップS14で送信された指定外ルート90Dが地図上に表示されている。この場合、指定外ルートは、交差点Bから交差点gまでのルートである。
【0037】
このように、本実施形態の走行ルート確認システムによれば、重さ指定の車両の総重量が制限値を超える車両が指定の走行ルートと違うルートを走行中であることを事務所側のPCに表示することができる。すなわち、積載中である車両が指定の走行ルートから外れた指定外ルートを走行していることを外部の機器(PC)で把握することができる。
【0038】
また、積載が無い、あるいは積載量が少なく、車両の総重量が制限値を超えない場合、指定の走行ルートに制限されることなく走行可能であるので、車両は効率的に運行することができる。
【0039】
また、通過点を通過する順番が異なる場合、指定の走行ルートから外れたと判断するので、指定の走行ルートからの外れを容易に判断することができる。また、指定の走行ルートから外れた場合、順番が合っている通過点から現在地までのルートを指定外ルート(外れたルート)として送信するので、送信するデータ量が少なく抑えられる。
【0040】
また、荷重センサを搭載しているので、走行中、積載荷重を検出し、乗務員は車両の総重量を把握することができる。
【0041】
また、事務所側のPCでは、表示器に表示された地図上に指定外ルートが重ねて表示されるので、視覚的に容易に指定外ルートを把握することができる。
【0042】
なお、本発明は、上記実施形態の構成に限られるものではなく、本実施形態の構成が持つ機能を達成できる構成であればどのようなものであっても適用可能である。
【0043】
例えば、上記実施形態では、イグニッションのON信号が入力された時にだけ、車両の総重量が制限値を超えるか否かを判別し、超える場合、これ以降、走行中、車両の総重量がずっと超えているものとして、指定外ルートの走行の有無が判断された。これに限らず、走行途中で、荷下ろし等を行って積載荷重が小さくなる場合を考慮し、途中であるいは定期的に車両の総重量が制限値を超えるか否かの判別を行うようにしてもよい。途中で制限値を越えなくなった場合、以降、指定外ルートの走行の有無を判断しなくてもよくなり、処理の負荷が軽減される。
【0044】
また、上記実施形態では、車両の総重量が制限値を超えない場合、指定外ルートの走行の有無を判断していないが、この場合も、指定外ルートの走行の有無を判断して記録する一方、事務所側のPCにはそのデータを送信しないようにしてもよい。
【0045】
また、上記実施形態では、各種のデータを収集する位置コンテンションとして、交差点を挙げたが、任意の場所でよいことは勿論である。また、上記実施形態では、車両の現在位置を取得するために、GPS受信部を搭載していたが、GPS受信部を搭載することなく、例えば無線基地局と通信して現在位置を取得するようにしてもよい。
【0046】
また、上記実施形態では、車載器はカーナビゲーション装置に適用された場合を示したが、本発明の車載器は上記実施形態で示した機能を有する単体の装置として、あるいは、他のドライブレコーダやデジタルタコグラフなどの車載器に搭載されてもよい。
【0047】
本発明は、車両に搭載された車載器に適用され、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができ、有用である。
【符号の説明】
【0048】
1 走行ルート確認システム
10 車載器
11 CPU
12 ROM
13 RAM
14 EEPROM
15 表示器
16 プリンタ
17 カードライタ
18 広域通信端末
18a アンテナ
19 GPS受信部
20 指定ルート記憶部
21 イグニッション(IGN)信号入力部
22 センサI/F
23 操作部
24 地図情報データベース(DB)
31、32、33、34、35、36 荷重センサ
40 アプリケーションサービスプロバイダ(ASP)
41 無線基地局
45 ネットワーク
50 コンピュータ装置(PC)
51 PC本体
52 表示器
53 データベース
54 操作部
55 ネットワーク接続部
65 大型車両
80 指定ルート
90A、90B、90C、90D 指定外ルート
【技術分野】
【0001】
本発明は、車両に搭載された車載器及び走行ルート確認システムに関する。
【背景技術】
【0002】
従来、特殊車両など、高さ指定、重さ指定に該当する車両等が公道を走行する場合、あらかじめ申請し、受理された指定の走行ルート(経路)で走行しなければならない。
【0003】
また、重さ指定の車両の重量は、積載量に車重を加えたものであるので、積載がなくても車重が制限値を超える場合、指定の走行ルートで走行しなければならない。
【0004】
この種の先行技術として、車両の積載重量を走行中に測定できる自重計機能付きナビゲーション装置が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−19939号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の車載器では、つぎのような問題があった。車両の総重量が制限値を超える場合、申請して受理された指定の走行ルートで走行しなければならなくても、実際に、重さ指定に該当する車両が指定の走行ルートを走行しているのか否か、車両を管理する事務所側ではわからなかった。
【0007】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができる車載器及び走行ルート確認システムを提供することにある。
【課題を解決するための手段】
【0008】
前述した目的を達成するために、本発明に係る車載器は、下記(1)〜(5)を特徴としている。
(1) 車両に搭載された車載器であって、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と、
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信する
こと。
(2) 上記(1)の構成の車載器であって、
前記検知手段によって前記車両が積載中であることが検知されない場合、前記通信手段は前記外れたルートを前記外部の機器に送信しない
こと。
(3) 上記(1)または(2)の構成の車載器であって、
前記指定の走行ルートに、あらかじめ決められた順番で通過するための複数の通過点を設定する設定手段と、
前記車両の現在地を取得する取得手段と
をさらに備え、
前記判別手段が、前記通過点を通過する際、前記取得手段によって取得される前記車両の現在地の順番が前記あらかじめ決められた順番と異なると判別した場合、前記通信手段は、前記外れたルートを送信する
こと。
(4) 上記(3)の構成の車載器であって、
前記通信手段は、前記外れたルートとして、前記順番が合っていると判別された前記通過点から前記車両の現在地までのルートを送信する
こと。
(5) 上記(1)から(4)のいずれか1つの構成の車載器であって、
前記車両の積載荷重を検出する荷重検出手段を
さらに備え、
前記荷重検出手段によって検出された積載荷重に前記車両の重量を加えた総重量が制限値を超える場合、前記検知手段は、前記車両が積載中であることを検知する
こと。
【0009】
前述した目的を達成するために、本発明に係る走行ルート確認システムは、下記(6)または(7)を特徴としている。
(6) 車両に搭載された車載器、および前記車載器と通信可能な外部の機器を備え、前記車両の走行ルートを確認する走行ルート確認システムであって、
前記車載器は、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信し、
前記外部の機器は、
前記通信手段によって送信された前記外れたルートを受信する受信手段と、
前記受信手段によって受信した前記外れたルートを表示する表示手段と
を備える
こと。
(7) 上記(6)の構成の走行ルート確認システムであって、
前記外部の機器は、
地図が記憶された地図記憶手段を
さらに備え、
前記表示手段は、前記地図記憶手段に記憶された地図を表示し、前記地図上に前記外れたルートを表示する
こと。
【発明の効果】
【0010】
本発明の車載器及び走行ルート確認システムによれば、車両が積載中であることが検知されている期間に、指定の走行ルートから外れたルートを車両が走行したことが判別された場合、外れたルートを外部の機器に送信する。これにより、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができる。
【0011】
また、積載が無い、あるいは積載量が少なく、車両の総重量が制限値を超えない場合、指定の走行ルートに制限されることなく走行可能であるので、車両は効率的に運行することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、実施の形態における車載器10を含む走行ルート確認システム1の構成を示す図である。
【図2】図2は、車載器10の筐体前面を示す図である。
【図3】図3は、走行ルート確認システム1の動作の概要を示す図である。
【図4】図4は、車載器10の動作手順を示すフローチャートである。
【図5】図5は、事務所側PC50の動作手順を示すフローチャートである。
【図6】図6は、事務所側PC50の表示器52の画面に表示された指定外ルートを示す図である。
【発明を実施するための形態】
【0013】
本発明の実施の形態における車載器及び走行ルート確認システムについて図面を用いて説明する。本実施形態の車載器は、特殊車両など重さ指定された車両に搭載されたカーナビゲーション装置に適用される。
【0014】
図1は実施の形態における車載器10を含む走行ルート確認システム1の構成を示す図である。走行ルート確認システム1は、大型の車両65(図3参照)に搭載された車載器10、および事務所に設置され、車両を管理するコンピュータ装置(PC)50から構成される。また、車載器10とPC50は、インターネット等のネットワーク45への接続サービスを行うアプリケーションサービスプロバイダ(ASP)40を介して、通信可能である。
【0015】
車載器10は、前述したようにカーナビゲーション装置であり、CPU11、ROM12、RAM13、EEPROM14、表示器15、プリンタ16、カードライタ17、広域通信端末18およびGPS受信部19を有する。また、車載器10は、指定ルート記憶部20、操作部23、地図情報データベース(DB)24、イグニッション(IGN)信号入力部21、およびセンサインタフェース(I/F)22を有する。
【0016】
表示器15は、指定の走行ルート(単に指定ルートともいう)、通過点となる交差点などが記された地図などを表示する。プリンタ16は各種の印刷を行う。カードライタ17はカードに各種のデータを記録する。
【0017】
広域通信端末18は、アンテナ18aを有し、このアンテナ18aおよび無線基地局41を介してネットワーク45に接続され、ASP40を通じて事務所側のPC50と通信を行う。GPS受信部19は、人工衛星から電波を受信し、車両の現在位置(現在地)を取得する。
【0018】
指定ルート記憶部20には、申請して受理された指定の走行ルート(指定ルート)が記憶される。この指定ルートは、車両の乗務員などが操作部23から入力されてもよいし、事務所側のPC50から受信してもよい。
【0019】
IGN信号入力部21には、イグニッションキーのオン信号が入力される。センサI/F22には、車両65に搭載され、車両各部の積載荷重を検出する荷重センサ31、32、33、34、35、36(荷重検出手段)が接続されている。操作部23は、表示器15の画面に設けられたタッチパネルや各種キーからなる。地図情報データベース24には、地図データが記憶されている。
【0020】
一方、事務所側のPC50は、PC本体51、表示器52、データベース53、操作部54およびネットワーク接続部55を有する。PC本体51は、周知のCPU、ROM、RAMなどを有する汎用のコンピュータであり、後述する動作プログラムを実行する。表示器52は、車載器10から送られる、後述する指定外ルートのデータを、画面に表示された地図に重ねて表示する。
【0021】
データベース53には、管理する車両の情報や地図データなどが登録されている(地図記憶手段)。操作部54はマウスやキーボードなどのデバイスである。ネットワーク接続部55は、ネットワーク45に接続され、ASP40を通じて車載器10と通信を行う。
【0022】
図2は車載器10の筐体前面を示す図である。車載器10の筐体前面には、表示器15および操作部23が設けられている。表示器15の画面には、事務所から目的地までの指定ルート80(図中、点線)や、ナビゲーションされる車両65の位置を表すマーク65aが地図上に表示されている。この指定ルート80では、車両は交差点A、交差点B、交差点Cの優先順位に従って走行しなければいけないことが示されている。
【0023】
上記構成を有する走行ルート確認システムの動作を示す。図3は走行ルート確認システム1の動作の概要を示す図である。ここでは、大型の車両65が、事務所から位置コンテンションとして設定された複数の通過点である交差点A、B、Cを順に経由して目的地まで走行するように、指定された走行ルート(指定ルート)が車載器10に設定されている。GPS受信部19により取得される車両65の現在地があらかじめ登録された位置コンテンションに達した場合、車載器10は、現在地、現在時刻、積載荷重等のデータをRAM13に記憶する。
【0024】
位置コンテンションとして、交差点A、B、Cの他、交差点d、e、f、gが登録されている(図2参照)。車両が位置コンテンションに達した場合、現在地のデータが記録されることで、交差点A、B、Cを順番どおりの優先順位で通過したか否かが判断される。
【0025】
例えば、交差点Aから、交差点Bを経由することなく、交差点Cに到達した場合、指定ルートから外れ、指定外ルートを走行したとして、図3に示すように、車載器10から事務所側PC50に指定外ルートのデータがネットワーク45経由で送信される。
【0026】
図4は車載器10の動作手順を示すフローチャートである。この動作プログラムは、ROM12に格納されており、CPU11によって実行される。CPU11は、IGN信号入力部21からイグニッションON信号が入力されるまで待つ(ステップS1)。
【0027】
イグニッションON信号が入力されると、CPU11は、センサI/F22を介して入力される荷重センサ31〜36で積載荷重を検出し、車両の総重量(積載量+車重)が制限値を超えるか否かを判別する(ステップS2)。ここで、車両の総重量が制限値を超えない場合、車両65は積載中でないと判別される。車両の総重量が制限値を超えない場合、CPU11はステップS2の処理を繰り返す。これにより、車両が積載中である期間に限り、これ以降、指定外ルートの走行の有無が判断されることになる。なお、このステップS2の処理は検知手段に相当する。
【0028】
一方、車両の総重量が制限値を超えた場合、CPU11は、GPS受信部19によりGPSデータを受信して車両の現在地の取得を開始する(ステップS3)。なお、このとき取得される車両の現在地が位置コンテンションでない場合、現在地のデータは単に記録され、つぎの位置コンテンションに達するまで現在地のデータは繰り返し取得される。
【0029】
CPU11は、車両の現在地が、指定ルート記憶部20にあらかじめ登録されている位置コンテンションである交差点Aに位置しているか否かを判別する(ステップS4)。交差点Aに位置している場合、CPU11は、交差点Aを経由済みに設定し(ステップS5)、ステップS4の処理に戻る。
【0030】
一方、交差点Aに位置していない場合、CPU11は、交差点Aを経由済みでなく、他の交差点に位置しているか否かを判別する(ステップS6)。交差点Aを経由済みでなく、他の交差点に位置している場合、CPU11は、イグニッションON信号が入力されてから現在地までのGPSデータ、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS7)。この後、CPU11は本動作を終了する。
【0031】
一方、ステップS6で交差点Aを経由済みである場合、CPU11は、現在地が位置コンテンションである交差点Cに位置しているか否かを判別する(ステップS8)。現在地が交差点Cに位置している場合、CPU11は、交差点Aから交差点CまでのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS9)。この後、CPU11は本動作を終了する。
【0032】
一方、ステップS8で交差点Cに位置していない場合、CPU11は、現在地が位置コンテンションである交差点Bに位置しているか否かを判別する(ステップS10)。交差点Bに位置していない場合、CPU11は、交差点Aから現在地までのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS11)。この後、CPU11は本動作を終了する。
【0033】
一方、ステップS10で交差点Bに位置している場合、CPU11は、交差点Bを経由済みに設定する(ステップS12)。そして、CPU11は、つぎに取得したGPSデータをもとに、現在地が位置コンテンションである交差点Cに位置するか否かを判別する(ステップS13)。交差点Cに位置しない場合、CPU11は、交差点Bから現在地までのGPSデータ(指定外ルートのデータ)、および積載量データをASP40を介して事務所側のPC50に送信する(ステップS14)。この後、CPU11は本動作を終了する。一方、ステップS13で交差点Cに位置する場合、指定された走行ルートを正常に走行したとして、CPU11は本動作を終了する。
【0034】
図5は事務所側PC50の動作手順を示すフローチャートである。この動作プログラムは、PC本体51内の記憶媒体に格納されており、PC本体51内のCPUによって実行される。
【0035】
PC50は、ASP40およびネットワーク接続部55を介して車載器10から送信されたデータ(指定外ルートのデータおよび積載量データ)を受信するまで待つ(ステップS31)。データを受信すると、PC50はそのデータをデータベース53に記録する(ステップS32)。さらに、PC50は、データベース53に登録された地図データを読み出し、指定外ルートが重なるように記された地図を表示器52に表示する(ステップS33)。この後、CPU11は本動作を終了する。
【0036】
図6は事務所側PC50の表示器52の画面に表示された指定外ルートを示す図である。図6(A)では、ステップS7で送信された指定外ルート90Aが地図上に表示されている。この場合、指定外ルートは事務所から交差点dまでのルートである。図6(B)では、ステップS9で送信された指定外ルート90Bが地図上に表示されている。この場合、指定外ルートは交差点Aから交差点Cまでのルートである。図6(C)では、ステップS11で送信された指定外ルート90Cが地図上に表示されている。この場合、指定外ルートは、交差点Aから交差点fまでのルートである。図6(D)では、ステップS14で送信された指定外ルート90Dが地図上に表示されている。この場合、指定外ルートは、交差点Bから交差点gまでのルートである。
【0037】
このように、本実施形態の走行ルート確認システムによれば、重さ指定の車両の総重量が制限値を超える車両が指定の走行ルートと違うルートを走行中であることを事務所側のPCに表示することができる。すなわち、積載中である車両が指定の走行ルートから外れた指定外ルートを走行していることを外部の機器(PC)で把握することができる。
【0038】
また、積載が無い、あるいは積載量が少なく、車両の総重量が制限値を超えない場合、指定の走行ルートに制限されることなく走行可能であるので、車両は効率的に運行することができる。
【0039】
また、通過点を通過する順番が異なる場合、指定の走行ルートから外れたと判断するので、指定の走行ルートからの外れを容易に判断することができる。また、指定の走行ルートから外れた場合、順番が合っている通過点から現在地までのルートを指定外ルート(外れたルート)として送信するので、送信するデータ量が少なく抑えられる。
【0040】
また、荷重センサを搭載しているので、走行中、積載荷重を検出し、乗務員は車両の総重量を把握することができる。
【0041】
また、事務所側のPCでは、表示器に表示された地図上に指定外ルートが重ねて表示されるので、視覚的に容易に指定外ルートを把握することができる。
【0042】
なお、本発明は、上記実施形態の構成に限られるものではなく、本実施形態の構成が持つ機能を達成できる構成であればどのようなものであっても適用可能である。
【0043】
例えば、上記実施形態では、イグニッションのON信号が入力された時にだけ、車両の総重量が制限値を超えるか否かを判別し、超える場合、これ以降、走行中、車両の総重量がずっと超えているものとして、指定外ルートの走行の有無が判断された。これに限らず、走行途中で、荷下ろし等を行って積載荷重が小さくなる場合を考慮し、途中であるいは定期的に車両の総重量が制限値を超えるか否かの判別を行うようにしてもよい。途中で制限値を越えなくなった場合、以降、指定外ルートの走行の有無を判断しなくてもよくなり、処理の負荷が軽減される。
【0044】
また、上記実施形態では、車両の総重量が制限値を超えない場合、指定外ルートの走行の有無を判断していないが、この場合も、指定外ルートの走行の有無を判断して記録する一方、事務所側のPCにはそのデータを送信しないようにしてもよい。
【0045】
また、上記実施形態では、各種のデータを収集する位置コンテンションとして、交差点を挙げたが、任意の場所でよいことは勿論である。また、上記実施形態では、車両の現在位置を取得するために、GPS受信部を搭載していたが、GPS受信部を搭載することなく、例えば無線基地局と通信して現在位置を取得するようにしてもよい。
【0046】
また、上記実施形態では、車載器はカーナビゲーション装置に適用された場合を示したが、本発明の車載器は上記実施形態で示した機能を有する単体の装置として、あるいは、他のドライブレコーダやデジタルタコグラフなどの車載器に搭載されてもよい。
【0047】
本発明は、車両に搭載された車載器に適用され、積載中である車両が指定の走行ルートから外れたルートを走行していることを外部の機器で把握することができ、有用である。
【符号の説明】
【0048】
1 走行ルート確認システム
10 車載器
11 CPU
12 ROM
13 RAM
14 EEPROM
15 表示器
16 プリンタ
17 カードライタ
18 広域通信端末
18a アンテナ
19 GPS受信部
20 指定ルート記憶部
21 イグニッション(IGN)信号入力部
22 センサI/F
23 操作部
24 地図情報データベース(DB)
31、32、33、34、35、36 荷重センサ
40 アプリケーションサービスプロバイダ(ASP)
41 無線基地局
45 ネットワーク
50 コンピュータ装置(PC)
51 PC本体
52 表示器
53 データベース
54 操作部
55 ネットワーク接続部
65 大型車両
80 指定ルート
90A、90B、90C、90D 指定外ルート
【特許請求の範囲】
【請求項1】
車両に搭載された車載器であって、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と、
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信する
ことを特徴とする車載器。
【請求項2】
前記検知手段によって前記車両が積載中であることが検知されない場合、前記通信手段は前記外れたルートを前記外部の機器に送信しない
ことを特徴とする請求項1記載の車載器。
【請求項3】
前記指定の走行ルートに、あらかじめ決められた順番で通過するための複数の通過点を設定する設定手段と、
前記車両の現在地を取得する取得手段と
をさらに備え、
前記判別手段が、前記通過点を通過する際、前記取得手段によって取得される前記車両の現在地の順番が前記あらかじめ決められた順番と異なると判別した場合、前記通信手段は、前記外れたルートを送信する
ことを特徴とする請求項1または2記載の車載器。
【請求項4】
車両に搭載された車載器、および前記車載器と通信可能な外部の機器を備え、前記車両の走行ルートを確認する走行ルート確認システムであって、
前記車載器は、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信し、
前記外部の機器は、
前記通信手段によって送信された前記外れたルートを受信する受信手段と、
前記受信手段によって受信した前記外れたルートを表示する表示手段と
を備える
ことを特徴とする走行ルート確認システム。
【請求項1】
車両に搭載された車載器であって、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と、
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信する
ことを特徴とする車載器。
【請求項2】
前記検知手段によって前記車両が積載中であることが検知されない場合、前記通信手段は前記外れたルートを前記外部の機器に送信しない
ことを特徴とする請求項1記載の車載器。
【請求項3】
前記指定の走行ルートに、あらかじめ決められた順番で通過するための複数の通過点を設定する設定手段と、
前記車両の現在地を取得する取得手段と
をさらに備え、
前記判別手段が、前記通過点を通過する際、前記取得手段によって取得される前記車両の現在地の順番が前記あらかじめ決められた順番と異なると判別した場合、前記通信手段は、前記外れたルートを送信する
ことを特徴とする請求項1または2記載の車載器。
【請求項4】
車両に搭載された車載器、および前記車載器と通信可能な外部の機器を備え、前記車両の走行ルートを確認する走行ルート確認システムであって、
前記車載器は、
前記車両が積載中であることを検知する検知手段と、
前記車両が指定の走行ルートを走行したか否かを判別する判別手段と、
外部の機器と通信を行う通信手段と
を備え、
前記検知手段によって前記車両が積載中であることが検知されている期間に、前記判別手段によって前記指定の走行ルートから外れたルートを前記車両が走行したことが判別された場合、前記通信手段は前記外れたルートを前記外部の機器に送信し、
前記外部の機器は、
前記通信手段によって送信された前記外れたルートを受信する受信手段と、
前記受信手段によって受信した前記外れたルートを表示する表示手段と
を備える
ことを特徴とする走行ルート確認システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−97607(P2013−97607A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−240424(P2011−240424)
【出願日】平成23年11月1日(2011.11.1)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年11月1日(2011.11.1)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
【Fターム(参考)】
[ Back to top ]