
車載地図表示装置、車両制御システム
【課題】他車両からのデータを受信可能な範囲が地図上で分かるようにする。
【解決手段】通信制御装置により受信された他車位置情報に基づいて、他車両の位置を示す他車位置マークを地図上に表示する(ステップS40)と共に、無線通信の通信エリアを特定する(ステップS130)。こうして特定された通信エリアを地図上に表示する(ステップS150)。
【解決手段】通信制御装置により受信された他車位置情報に基づいて、他車両の位置を示す他車位置マークを地図上に表示する(ステップS40)と共に、無線通信の通信エリアを特定する(ステップS130)。こうして特定された通信エリアを地図上に表示する(ステップS150)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されて地図を表示する車載地図表示装置と、車載地図表示装置を有する車両制御システムとに関する。
【背景技術】
【0002】
従来、車々間通信により他車両からのデータを受信し、そのデータに基づいて特定される他車両の位置を地図上に表示する車載用電子装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2006−64616号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される従来の車載用電子装置では、他車両からのデータを受信可能な範囲が地図上で分からない。
【課題を解決するための手段】
【0005】
請求項1の発明による車載地図表示装置は、無線通信により送信された他車両の位置情報を受信する無線装置と接続され、その無線装置により受信された位置情報に基づいて他車両の位置を地図上に表示する他車位置表示手段と、無線装置により受信された位置情報に基づいて無線通信の通信エリアを特定する通信エリア特定手段と、通信エリア特定手段により特定された通信エリアを地図上に表示する通信エリア表示手段とを備える。
請求項2の発明は、請求項1に記載の車載地図表示装置において、通信エリア特定手段は、無線装置における位置情報の受信状況の変化に応じて通信エリアを特定するものである。
請求項3の発明は、請求項2に記載の車載地図表示装置において、位置情報は繰り返し送信され、無線装置が位置情報を前回受信して今回受信しなかった場合、または、無線装置が位置情報を今回新たに受信した場合に、通信エリア特定手段は、位置情報に基づいて通信エリアを特定するものである。
請求項4の発明は、請求項1〜3のいずれか一項に記載の車載地図表示装置において、無線装置は他車両の速度情報をさらに受信し、通信エリア特定手段は、無線装置により受信された速度情報に基づいて通信エリアの特定に用いる位置情報を決定するものである。
請求項5の発明は、請求項4に記載の車載地図表示装置において、無線装置により受信された速度情報が示す他車両の速度が所定値未満である場合、通信エリア特定手段は、当該他車両の位置情報を除外して無線通信の通信エリアを特定するものである。
請求項6の発明は、請求項1〜5のいずれか一項に記載の車載地図表示装置において、無線装置は複数の他車両からそれぞれ送信される位置情報を受信し、通信エリア特定手段は、無線装置により位置情報を受信された他車両の台数に応じて通信エリアの特定方法を切り替えるものである。
請求項7の発明は、請求項6に記載の車載地図表示装置において、通信エリア特定手段は、無線装置により位置情報を受信された他車両が所定数未満である場合は予め設定された無線通信の能力に応じて通信エリアを特定し、無線装置により位置情報を受信された他車両が所定数以上である場合は位置情報に基づいて通信エリアを特定するものである。
請求項8の発明は、請求項1〜7のいずれか一項に記載の車載地図表示装置において、無線装置は、自車両と他車両との間で行われる車々間通信により他車両の位置情報を受信するものである。
請求項9の発明による車両制御システムは、請求項1〜8のいずれか一項に記載の車載地図表示装置と無線装置とを有する。
【発明の効果】
【0006】
本発明によれば、他車両からのデータを受信可能な範囲が地図上で分かる。
【発明を実施するための最良の形態】
【0007】
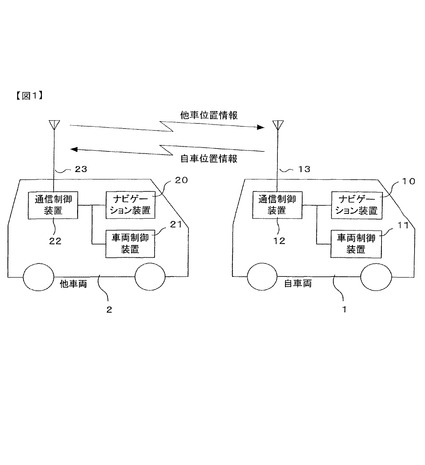
本発明の一実施の形態による車両制御システムの構成を図1に示す。この車両制御システムは、自車両1と他車両2とが無線通信である車々間通信によって互いの位置情報を交換し、それによって相手方の走行状態をそれぞれ判断することで、必要に応じて様々な車両制御を行うものである。自車両1には、ナビゲーション装置10、車両制御装置11、通信制御装置12およびアンテナ13が備えられている。同様に、他車両2には、ナビゲーション装置20、車両制御装置21、通信制御装置22およびアンテナ23が備えられている。なお、図1では1台の他車両2のみを示しているが、実際には通信エリア内に存在する複数の他車両2と自車両1との間で車々間通信が行われる。
【0008】
ナビゲーション装置10は、自車両1から所定範囲内の地図を表示モニタに表示する。このときナビゲーション装置10は、自車両1の位置を示す自車位置マークをその地図上に表示すると共に、通信制御装置12により受信される他車位置情報に基づいて、他車両2の位置を示す他車位置マークを地図上に表示する。こうした地図表示を行うことにより、自車両1と他車両2との位置関係をユーザに対して知らせる。加えてナビゲーション装置10は、通信制御装置12が行う無線通信の通信エリアを特定し、その通信エリアを地図上に表示する。これにより、他車両2から位置情報を受信可能な範囲を地図上で分かるようにする。
【0009】
またナビゲーション装置10は、車両制御装置11からの指示により、必要に応じて警告音の出力や警告メッセージの表示を行う。これにより、自車両1に向かって走行している他車両2の存在などをユーザに知らせることができる。
【0010】
さらにナビゲーション装置10は、目的地が設定されることにより、自車両1をその目的地まで案内するためのナビゲーション処理を実行する。すなわち、ユーザの操作などによりナビゲーション装置10に対して目的地が設定されると、ナビゲーション装置10はその目的地までの推奨経路を地図データに基づいて探索する。そして、探索された推奨経路を地図上に表示し、その推奨経路に従ってユーザに進行方向の指示を行うことにより、自車両1を目的地まで案内する。なお、このときにも前述のように自車位置マークと他車位置マークが地図上に表示される。
【0011】
車両制御装置11は、自車両1の挙動やユーザの運転操作等に応じて、自車両1における様々な動作の制御を行う。たとえば、アクセルペダルの踏み込み量やエンジン回転数などに応じてアクセル開度を調節することで、自車両1に生じる加速度を制御する。さらに車両制御装置11は、ナビゲーション装置10による自車位置の検出結果と他車位置の特定結果とに基づいて、自車両1と他車両2との位置関係やその変化状態を判断し、この判断結果に応じて、ナビゲーション装置10に対する警告の指示や自車両1の駆動制御を必要に応じて行う。たとえば、自車両1の走行道路と交差する道路を走行中の他車両2が、自車両1に向かって所定距離以内に接近していると判断されたとする。このような場合、車両制御装置11は、他車両2が接近している旨の警告をナビゲーション装置10に対して指示すると共に、必要であれば自車両1のブレーキを制御して自車両1を停止させる。
【0012】
通信制御装置12は、アンテナ13を用いて、他車両2に搭載された通信制御装置22との間で車々間通信を行う。この車々間通信により、通信制御装置12において、他車両2の位置を表す他車位置情報が受信されると共に、自車両1の位置を表す自車位置情報が送信される。なお、このときに車々間通信を行う車両の各々を特定するための車両ID情報と、各車両の走行速度を示す車速情報とが、自車位置情報または他車位置情報と共に送信される。こうして自車両1と他車両2の位置情報が交換される。
【0013】
通信制御装置12において受信された他車位置情報は、通信制御装置12からナビゲーション装置10に対して出力される。この他車位置情報に基づいて、ナビゲーション装置10は前述のように他車両2の位置を特定し、その結果を車両制御装置11へ出力する。こうしてナビゲーション装置10から他車位置の特定結果が出力されると、それに基づいて車両制御装置11は、前述のような制御を自車両1に対して行う。なお、通信制御装置12および22を用いて自車両1と他車両2との間で行われる車々間通信には、たとえばDSRC(Dedicated Short Range Communications)による通信方式などを利用することができる。
【0014】
自車両1に搭載されているナビゲーション装置10、車両制御装置11、通信制御装置12およびアンテナ13は、以上説明したような処理や動作を行う。なお、他車両2に搭載されているナビゲーション装置20、車両制御装置21、通信制御装置22およびアンテナ23も、それぞれに同様の処理や動作を行う。
【0015】
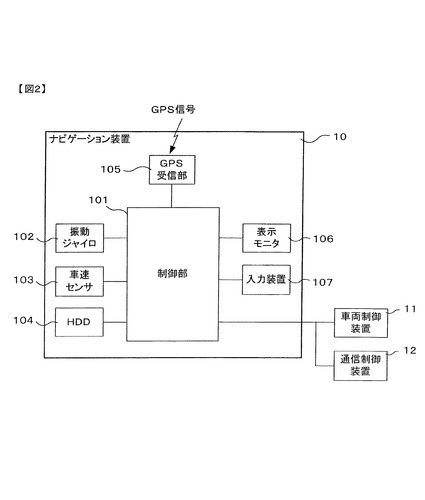
次に、ナビゲーション装置10の構成を図2に示す。ナビゲーション装置10は、制御部101、振動ジャイロ102、車速センサ103、ハードディスク(HDD)104、GPS受信部105、表示モニタ106および入力装置107を備えている。
【0016】
制御部101は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD104に記録されている制御プログラムや地図データに基づいて、各種の処理を実行する。この制御部101により、ナビゲーション装置10における様々な処理が実行される。たとえば、目的地を設定する際の目的地の探索処理、設定された目的地までの推奨経路の探索処理、自車位置の検出処理、各種の画像表示処理、ルート案内時の処理などが実行される。
【0017】
制御部101は車両制御装置11および通信制御装置12と接続されており、これらとの間で様々な信号やデータが入出力される。たとえば通信制御装置12に対して、制御部101により検出された自車位置の情報が所定時間ごとに出力される。この自車位置情報は、通信制御装置12が行う車々間通信によって自車両1から他車両2へと送信される。一方、通信制御装置12から制御部101には、他車両2から受信した他車位置情報が入力される。
【0018】
通信制御装置12から他車位置情報が入力されると、制御部101は、その他車位置情報に基づいて他車両2の位置を特定する。このとき、他車位置情報とHDD104に記録されている地図データとに基づいてマップマッチングを行うことにより、他車両2が地図上でどの道路を走行しているかを判断し、その判断結果を反映して他車両2の位置を特定するようにしてもよい。この他車位置の特定結果は、自車位置の検出結果と共に、制御部101から車両制御装置11へ出力される。車両制御装置11は、これらに基づいて自車両1と他車両2との位置関係やその変化状態を判断し、前述のような警告指示や駆動制御を必要に応じて行う。
【0019】
振動ジャイロ102は、自車両1の角速度を検出するためのセンサである。車速センサ103は、自車両1の車速を検出するためのセンサである。これらのセンサを用いて自車両1の運動状態を所定の時間間隔ごとに検出することにより、自車両1の移動量が求められ、それによって自車両1の現在位置が検出される。
【0020】
HDD104は、データの書き換えが可能な不揮発性の記録媒体であり、地図データを含む各種のデータが記録されている。HDD104に記録されている地図データは、必要に応じて制御部101の制御により読み出され、制御部101が実行する様々な処理や制御に利用される。この地図データには、経路計算データと、経路誘導データと、道路データと、背景データとが含まれている。経路計算データは、目的地までのルート探索に用いられる。経路誘導データは、設定された経路に従って自車両1を目的地まで誘導するために用いられ、交差点名称や道路名称などを表す。道路データは、道路の形状や種別を表す。背景データは、河川や鉄道などの道路以外の地図形状や、各種施設の位置などを表す。
【0021】
GPS受信部105は、GPS衛星から送信されるGPS信号を受信して制御部101へ出力する。GPS信号には、自車両1の位置と現在時刻を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて自車両1の現在位置と現在時刻を算出することができる。
【0022】
表示モニタ106は、ナビゲーション装置10において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ106により、前述したように自車両1の周辺について地図が表示され、その地図上に自車位置マークと他車位置マークが表示されると共に、通信エリアが表示される。表示モニタ106に表示される画面の内容は、制御部101が行う画面表示制御によって決定される。表示モニタ106は、たとえば自車両1のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0023】
入力装置107は、ナビゲーション装置10を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザはこの入力装置107を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、地図を任意の方向にスクロールしたりすることができる。入力装置107は、操作パネルやリモコンなどによって実現することができる。あるいは、表示モニタ106と一体化されたタッチパネルにより入力装置107を実現してもよい。
【0024】
ユーザが入力装置107を操作して目的地を設定すると、ナビゲーション装置10は、前述の経路計算データに基づいて所定のアルゴリズムの演算を行うことにより、目的地までの推奨経路を探索する。そして、自車両1の現在位置を検出し、その周辺の道路地図を表示しながら、探索された推奨経路に従って自車両1を目的地まで誘導する。
【0025】
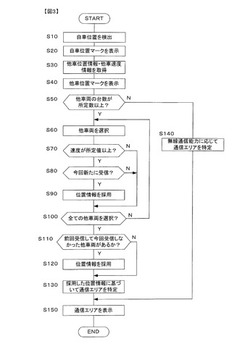
ナビゲーション装置10が地図上に自車位置マークと他車位置マークを表示し、さらに通信エリアを表示する際の処理のフローチャートを図3に示す。このフローチャートは、制御部101において所定の処理サイクル間隔で実行される。
【0026】
ステップS10において、制御部101は、自車位置の検出を行う。ここでは前述したように、振動ジャイロ102および車速センサ103の検出結果に基づいて、自車両1の位置を検出する。なお、このときHDD104に記録された地図データに基づいてマップマッチングを行うことにより、自車両1が地図上でどの道路を走行しているかを判断し、その判断結果を反映して自車位置を検出してもよい。これにより、自車両1が走行している道路に合わせて自車位置を補正することができる。ステップS20において、制御部101は、ステップS10で検出した自車位置に基づいて、表示モニタ106に表示されている地図上に自車位置マークを表示する。
【0027】
ステップS30において、制御部101は、他車位置情報と他車速度情報を取得する。ここでは前述のように、通信制御装置12を用いて自車両1と他車両2との間で行われる車々間通信により、他車両2の位置を示す他車位置情報と、他車両2の速度を示す他車速度情報とが他車両2から送信され、通信制御装置12によって受信される。こうして受信された他車位置情報および他車速度情報が通信制御装置12から制御部101に対して出力されることにより、制御部101は他車位置情報と他車速度情報を取得する。なお、車々間通信による他車位置情報および他車速度情報の送信は、各車両からそれぞれ所定の送信タイミングごとに繰り返し行われる。
【0028】
ステップS40において、制御部101は、ステップS30で取得した他車位置情報に基づいて、表示モニタ106に表示されている地図上に他車位置マークを表示する。このとき地図データに基づいてマップマッチングを行うことで、他車両2が地図上でどの道路を走行しているかを判断し、その判断結果を反映して他車両2の位置を道路に合わせて補正してもよい。
【0029】
ステップS50において、制御部101は、ステップS30で他車位置情報を取得した他車両2の台数、すなわち通信制御装置12により位置情報を受信された他車両2の台数が、所定数以上であるか否かを判定する。このような他車両2の台数が所定数以上、たとえば3台以上である場合はステップS60へ進み、所定数未満である場合はステップS140へ進む。
【0030】
ステップS60において、制御部101は、ステップS30で他車位置情報を取得した他車両2のうちでいずれかを選択する。ここで選択した他車両2を、以下の説明では選択車両と称する。ステップS70において、制御部10は、ステップS30で取得した選択車両の他車速度情報に基づいて、選択車両の速度が所定値以上であるか否かを判定する。他車速度情報が示す選択車両の速度が所定値以上であればステップS80へ進み、所定値未満であればステップS100へ進む。これにより、所定速度以下で走行している車両や停止している車両の位置情報をステップS90の採用対象から除外し、その位置情報に基づいて通信エリアが特定されないようにする。
【0031】
ステップS80において、制御部101は、ステップS30で取得した選択車両の他車位置情報が、今回の送信タイミングにおいて通信制御装置12により新たに受信されたものであるか否かを判定する。通信制御装置12が選択車両の他車位置情報を今回新たに受信した場合は、ステップS90へ進む。そうでない場合、すなわち通信制御装置12が選択車両の他車位置情報を前回も受信していた場合は、ステップS100へ進む。
【0032】
ステップS90において、制御部101は、選択車両の位置情報を通信エリアの特定に用いるための位置情報として採用する。ここで採用された選択車両の位置情報は、後で説明するステップS130において、無線通信による車々間通信の通信エリアを特定する際に用いられる。なお、ナビゲーション装置10の始動直後は、ステップS30で取得した全ての位置情報が今回の送信タイミングにおいて新たに受信されたものである。したがって、ステップS70およびS80の判定結果に関わらず、ステップS90ではいずれの位置情報も採用しないことが好ましい。
【0033】
ステップS100において、制御部101は、ステップS30で他車位置情報を取得した他車両2の全てをステップS60において選択したか否かを判定する。全ての他車両2を選択車両として選択済みである場合はステップS110へ進み、未選択の他車両2がある場合はステップS60へ戻って前述のような処理を繰り返す。これにより、通信制御装置12が車々間通信で他車位置情報を受信した全ての他車両2が選択されるまで、ステップS60〜S100の処理が繰り返し実行される。
【0034】
ステップS110において、制御部101は、前回の送信タイミングでは通信制御装置12により他車位置情報が受信されたが、今回の送信タイミングでは受信されなかった他車両2があるか否かを判定する。いずれかの他車両2について通信制御装置12が他車位置情報を前回受信して今回受信しなかった場合は、ステップS120へ進む。すなわち、これまでは無線通信による車々間通信が可能であったが、今回不可能となった他車両2が存在する場合は、ステップS120へ進む。一方、このような他車両2が存在しない場合は、ステップS130へ進む。
【0035】
ステップS120において、制御部101は、ステップS110の判定条件を満たす他車両2の位置情報を、前述のステップS90と同様に通信エリアの特定に用いるための位置情報として採用する。
【0036】
ステップS130において、制御部101は、ステップS90およびステップS120で採用した位置情報に基づいて、無線通信による車々間通信の通信エリアを特定する。ここでは、採用した位置情報に基づいて特定される複数の他車両2の位置をつなぎ合わせ、これを通信エリアとする。こうして通信エリアを特定したら、ステップS150へ進む。
【0037】
一方、ステップS50からステップS140へ進んだ場合、ステップS140において制御部101は、予め定められた車々間通信の無線通信能力に応じて通信エリアを特定する。すなわち、他車両2の通信制御装置22が他車位置情報を自車両1へ送信する際の空中線電力や、アンテナ23およびアンテナ13の利得、通信制御装置11の最小受信感度などに基づいて、通信エリアを特定する。このようにして通信エリアを特定したら、ステップS150へ進む。
【0038】
ステップS150において、制御部101は、ステップS130またはS140において特定した通信エリアを表示モニタ106に表示されている地図上に表示する。なお、ステップS150で表示した通信エリアを、自車両1の移動に応じて地図上で移動させるようにしてもよい。ステップS150を実行したら、制御部101は図3のフローチャートを終了する。
【0039】
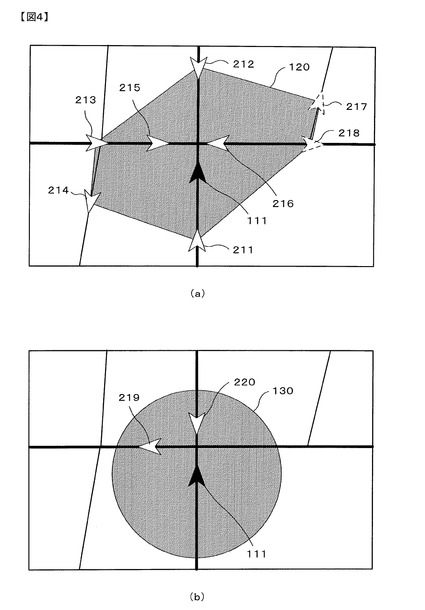
以上説明したような処理を実行することにより、自車位置マークと他車位置マークが表示されると共に、通信エリアが表示された地図画面の例を図4に示す。図4(a)は、ステップS130で特定された通信エリアが表示された地図画面の例であり、図4(b)は、ステップS140で特定された通信エリアが表示された地図画面の例である。
【0040】
図4(a)の地図画面では、自車位置マーク111の周囲に通信エリア120が表示されている。他車位置マーク211〜218のうち、実線で示す他車位置マーク211〜216は、今回の送信タイミングにおいて通信制御装置12により受信された他車位置情報に基づいてその位置が特定される。そのうち他車位置マーク211〜214は、他車位置情報が前回の送信タイミングでは受信されず、今回の送信タイミングで新たに受信されたものである。一方、破線で示す他車位置マーク217、218は、他車位置情報が前回の送信タイミングでは受信されていたが、今回の送信タイミングで受信されなくなったものである。これらの他車位置マーク211〜214および217、218を結ぶことにより、通信エリア120が特定される。なお、図4(a)では他車位置マーク217、218を破線で示しているが、実際の地図画面ではこれらの他車位置マークは表示されない。
【0041】
図4(b)の地図画面では、自車位置マーク111の周囲に、予め定められた車々間通信の無線通信能力に応じた円形の通信エリア130が表示されている。この通信エリア130の中に、他車位置マーク219、220が表示されている。なお、ここでは建物等による影響を考慮せずに通信エリア130を決定しているたが、これを考慮して通信エリア130を決定してもよい。たとえば、地図データに基づいて自車位置マーク111の付近に高い建物があるか否かを判定し、高い建物がある場合は、その建物の陰になる部分を通信エリア130から除外する。
【0042】
以上説明した実施の形態によれば、次の作用効果を奏する。
(1)車載地図表示装置であるナビゲーション装置10は、他車両2から無線通信により送信された他車両2の位置情報(他車位置情報)を受信する通信制御装置12と接続されている。ナビゲーション装置10は、制御部101の処理により、通信制御装置12により受信された他車位置情報に基づいて、他車両2の位置を示す他車位置マークを地図上に表示する(ステップS40)と共に、無線通信の通信エリアを特定する(ステップS130)。こうして特定された通信エリアを地図上に表示する(ステップS150)。このようにしたので、他車両からのデータを受信可能な範囲が地図上で分かる。
【0043】
(2)ステップS130において、制御部101は、通信制御装置12における他車位置情報の受信状況の変化に応じて通信エリアを特定する。すなわち、通信制御装置12が他車位置情報を前回受信して今回受信しなかったか否かを判定し(ステップS110)、これを満たす他車位置情報がある場合は採用する(ステップS120)。また、通信制御装置12が他車位置情報を今回新たに受信したか否かを判定し(ステップS80)、これを満たす他車位置情報がある場合は採用する(ステップS90)。ステップS130では、こうして採用した他車位置情報に基づいて通信エリアを特定する。このようにしたので、実際の受信状況を反映して通信エリアを特定し、地図上に表示することができる。
【0044】
(3)通信制御装置12は、他車両2の速度情報(他車速度情報)をさらに受信する。ステップS130において、制御部101は、通信制御装置12により受信された他車速度情報に基づいて、通信エリアの特定に用いる他車位置情報を決定する。すなわち、通信制御装置12により受信された他車速度情報が示す他車両2の速度が所定値以上であるか否かを判定し(ステップS70)、所定値未満である場合は、当該他車両2の他車位置情報をステップS90の採用対象から除外する。ステップS130では、採用対象から除外されなかった他車位置情報に基づいて通信エリアを特定する。このようにしたので、所定速度以下で走行している車両や停止している車両の位置情報を採用対象から除外し、その位置情報に基づいて通信エリアが特定されないようにすることができる。したがって、より一層実際の受信状況を反映して通信エリアを特定し、地図上に表示することができる。
【0045】
(4)制御部101は、通信制御装置12により他車位置情報を受信された他車両2の台数に応じて、通信エリアの特定方法を切り替える。すなわち、通信制御装置12により他車位置情報を受信された他車両2の台数が所定数以上であるか否かを判定し(ステップS50)、所定値未満である場合は、予め設定された無線通信の能力に応じて通信エリアを特定する(ステップS140)。一方、通信制御装置12により他車位置情報を受信された他車両2の台数が所定数以上である場合は、他車位置情報に基づいて通信エリアを特定する(ステップS130)。このようにしたので、車々間通信可能な他車両の台数が少ない場合であっても、通信エリアを特定して地図上に表示することができる。
【0046】
(5)通信制御装置12は、自車両1と他車両2との間で行われる車々間通信により、他車両2の位置情報を取得する。このようにしたので、他車両の正確な位置情報を容易に取得することができる。
【0047】
以上説明した実施の形態では、ナビゲーション装置10により、図3のフローチャートに示す処理を実行する例を説明したが、本発明はこれに限定されず、様々な車載電子装置に適用することができる。
【0048】
以上説明した実施の形態や各種の変形例は、あくまで一例である。したがって、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【0049】
以上説明した実施の形態では、特許請求の範囲に記載された各手段を、ナビゲーション装置10の制御部101において実行される処理によりそれぞれ実現することとした。すなわち、ナビゲーション装置10の制御部101は、他車位置表示手段、通信エリア特定手段および通信エリア表示手段として機能する。なお、以上の説明はあくまで一例であり、発明を解釈する際、各実施の形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施の形態による車両制御システムの構成図である。
【図2】ナビゲーション装置の構成図である。
【図3】地図上に自車位置マークと他車位置マークを表示し、さらに通信エリアを表示する際の処理のフローチャートである。
【図4】通信エリアが表示された地図画面の例を示す図である。
【符号の説明】
【0051】
1:自車両 2:他車両
10,20:ナビゲーション装置 11,21:車両制御装置
12,22:通信制御装置 13,23:アンテナ
101:制御部 102:振動ジャイロ
103:車速センサ 104:HDD
105:GPS受信部 106:表示モニタ
107:入力装置
【技術分野】
【0001】
本発明は、車両に搭載されて地図を表示する車載地図表示装置と、車載地図表示装置を有する車両制御システムとに関する。
【背景技術】
【0002】
従来、車々間通信により他車両からのデータを受信し、そのデータに基づいて特定される他車両の位置を地図上に表示する車載用電子装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2006−64616号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される従来の車載用電子装置では、他車両からのデータを受信可能な範囲が地図上で分からない。
【課題を解決するための手段】
【0005】
請求項1の発明による車載地図表示装置は、無線通信により送信された他車両の位置情報を受信する無線装置と接続され、その無線装置により受信された位置情報に基づいて他車両の位置を地図上に表示する他車位置表示手段と、無線装置により受信された位置情報に基づいて無線通信の通信エリアを特定する通信エリア特定手段と、通信エリア特定手段により特定された通信エリアを地図上に表示する通信エリア表示手段とを備える。
請求項2の発明は、請求項1に記載の車載地図表示装置において、通信エリア特定手段は、無線装置における位置情報の受信状況の変化に応じて通信エリアを特定するものである。
請求項3の発明は、請求項2に記載の車載地図表示装置において、位置情報は繰り返し送信され、無線装置が位置情報を前回受信して今回受信しなかった場合、または、無線装置が位置情報を今回新たに受信した場合に、通信エリア特定手段は、位置情報に基づいて通信エリアを特定するものである。
請求項4の発明は、請求項1〜3のいずれか一項に記載の車載地図表示装置において、無線装置は他車両の速度情報をさらに受信し、通信エリア特定手段は、無線装置により受信された速度情報に基づいて通信エリアの特定に用いる位置情報を決定するものである。
請求項5の発明は、請求項4に記載の車載地図表示装置において、無線装置により受信された速度情報が示す他車両の速度が所定値未満である場合、通信エリア特定手段は、当該他車両の位置情報を除外して無線通信の通信エリアを特定するものである。
請求項6の発明は、請求項1〜5のいずれか一項に記載の車載地図表示装置において、無線装置は複数の他車両からそれぞれ送信される位置情報を受信し、通信エリア特定手段は、無線装置により位置情報を受信された他車両の台数に応じて通信エリアの特定方法を切り替えるものである。
請求項7の発明は、請求項6に記載の車載地図表示装置において、通信エリア特定手段は、無線装置により位置情報を受信された他車両が所定数未満である場合は予め設定された無線通信の能力に応じて通信エリアを特定し、無線装置により位置情報を受信された他車両が所定数以上である場合は位置情報に基づいて通信エリアを特定するものである。
請求項8の発明は、請求項1〜7のいずれか一項に記載の車載地図表示装置において、無線装置は、自車両と他車両との間で行われる車々間通信により他車両の位置情報を受信するものである。
請求項9の発明による車両制御システムは、請求項1〜8のいずれか一項に記載の車載地図表示装置と無線装置とを有する。
【発明の効果】
【0006】
本発明によれば、他車両からのデータを受信可能な範囲が地図上で分かる。
【発明を実施するための最良の形態】
【0007】
本発明の一実施の形態による車両制御システムの構成を図1に示す。この車両制御システムは、自車両1と他車両2とが無線通信である車々間通信によって互いの位置情報を交換し、それによって相手方の走行状態をそれぞれ判断することで、必要に応じて様々な車両制御を行うものである。自車両1には、ナビゲーション装置10、車両制御装置11、通信制御装置12およびアンテナ13が備えられている。同様に、他車両2には、ナビゲーション装置20、車両制御装置21、通信制御装置22およびアンテナ23が備えられている。なお、図1では1台の他車両2のみを示しているが、実際には通信エリア内に存在する複数の他車両2と自車両1との間で車々間通信が行われる。
【0008】
ナビゲーション装置10は、自車両1から所定範囲内の地図を表示モニタに表示する。このときナビゲーション装置10は、自車両1の位置を示す自車位置マークをその地図上に表示すると共に、通信制御装置12により受信される他車位置情報に基づいて、他車両2の位置を示す他車位置マークを地図上に表示する。こうした地図表示を行うことにより、自車両1と他車両2との位置関係をユーザに対して知らせる。加えてナビゲーション装置10は、通信制御装置12が行う無線通信の通信エリアを特定し、その通信エリアを地図上に表示する。これにより、他車両2から位置情報を受信可能な範囲を地図上で分かるようにする。
【0009】
またナビゲーション装置10は、車両制御装置11からの指示により、必要に応じて警告音の出力や警告メッセージの表示を行う。これにより、自車両1に向かって走行している他車両2の存在などをユーザに知らせることができる。
【0010】
さらにナビゲーション装置10は、目的地が設定されることにより、自車両1をその目的地まで案内するためのナビゲーション処理を実行する。すなわち、ユーザの操作などによりナビゲーション装置10に対して目的地が設定されると、ナビゲーション装置10はその目的地までの推奨経路を地図データに基づいて探索する。そして、探索された推奨経路を地図上に表示し、その推奨経路に従ってユーザに進行方向の指示を行うことにより、自車両1を目的地まで案内する。なお、このときにも前述のように自車位置マークと他車位置マークが地図上に表示される。
【0011】
車両制御装置11は、自車両1の挙動やユーザの運転操作等に応じて、自車両1における様々な動作の制御を行う。たとえば、アクセルペダルの踏み込み量やエンジン回転数などに応じてアクセル開度を調節することで、自車両1に生じる加速度を制御する。さらに車両制御装置11は、ナビゲーション装置10による自車位置の検出結果と他車位置の特定結果とに基づいて、自車両1と他車両2との位置関係やその変化状態を判断し、この判断結果に応じて、ナビゲーション装置10に対する警告の指示や自車両1の駆動制御を必要に応じて行う。たとえば、自車両1の走行道路と交差する道路を走行中の他車両2が、自車両1に向かって所定距離以内に接近していると判断されたとする。このような場合、車両制御装置11は、他車両2が接近している旨の警告をナビゲーション装置10に対して指示すると共に、必要であれば自車両1のブレーキを制御して自車両1を停止させる。
【0012】
通信制御装置12は、アンテナ13を用いて、他車両2に搭載された通信制御装置22との間で車々間通信を行う。この車々間通信により、通信制御装置12において、他車両2の位置を表す他車位置情報が受信されると共に、自車両1の位置を表す自車位置情報が送信される。なお、このときに車々間通信を行う車両の各々を特定するための車両ID情報と、各車両の走行速度を示す車速情報とが、自車位置情報または他車位置情報と共に送信される。こうして自車両1と他車両2の位置情報が交換される。
【0013】
通信制御装置12において受信された他車位置情報は、通信制御装置12からナビゲーション装置10に対して出力される。この他車位置情報に基づいて、ナビゲーション装置10は前述のように他車両2の位置を特定し、その結果を車両制御装置11へ出力する。こうしてナビゲーション装置10から他車位置の特定結果が出力されると、それに基づいて車両制御装置11は、前述のような制御を自車両1に対して行う。なお、通信制御装置12および22を用いて自車両1と他車両2との間で行われる車々間通信には、たとえばDSRC(Dedicated Short Range Communications)による通信方式などを利用することができる。
【0014】
自車両1に搭載されているナビゲーション装置10、車両制御装置11、通信制御装置12およびアンテナ13は、以上説明したような処理や動作を行う。なお、他車両2に搭載されているナビゲーション装置20、車両制御装置21、通信制御装置22およびアンテナ23も、それぞれに同様の処理や動作を行う。
【0015】
次に、ナビゲーション装置10の構成を図2に示す。ナビゲーション装置10は、制御部101、振動ジャイロ102、車速センサ103、ハードディスク(HDD)104、GPS受信部105、表示モニタ106および入力装置107を備えている。
【0016】
制御部101は、マイクロプロセッサや各種周辺回路、RAM、ROM等によって構成されており、HDD104に記録されている制御プログラムや地図データに基づいて、各種の処理を実行する。この制御部101により、ナビゲーション装置10における様々な処理が実行される。たとえば、目的地を設定する際の目的地の探索処理、設定された目的地までの推奨経路の探索処理、自車位置の検出処理、各種の画像表示処理、ルート案内時の処理などが実行される。
【0017】
制御部101は車両制御装置11および通信制御装置12と接続されており、これらとの間で様々な信号やデータが入出力される。たとえば通信制御装置12に対して、制御部101により検出された自車位置の情報が所定時間ごとに出力される。この自車位置情報は、通信制御装置12が行う車々間通信によって自車両1から他車両2へと送信される。一方、通信制御装置12から制御部101には、他車両2から受信した他車位置情報が入力される。
【0018】
通信制御装置12から他車位置情報が入力されると、制御部101は、その他車位置情報に基づいて他車両2の位置を特定する。このとき、他車位置情報とHDD104に記録されている地図データとに基づいてマップマッチングを行うことにより、他車両2が地図上でどの道路を走行しているかを判断し、その判断結果を反映して他車両2の位置を特定するようにしてもよい。この他車位置の特定結果は、自車位置の検出結果と共に、制御部101から車両制御装置11へ出力される。車両制御装置11は、これらに基づいて自車両1と他車両2との位置関係やその変化状態を判断し、前述のような警告指示や駆動制御を必要に応じて行う。
【0019】
振動ジャイロ102は、自車両1の角速度を検出するためのセンサである。車速センサ103は、自車両1の車速を検出するためのセンサである。これらのセンサを用いて自車両1の運動状態を所定の時間間隔ごとに検出することにより、自車両1の移動量が求められ、それによって自車両1の現在位置が検出される。
【0020】
HDD104は、データの書き換えが可能な不揮発性の記録媒体であり、地図データを含む各種のデータが記録されている。HDD104に記録されている地図データは、必要に応じて制御部101の制御により読み出され、制御部101が実行する様々な処理や制御に利用される。この地図データには、経路計算データと、経路誘導データと、道路データと、背景データとが含まれている。経路計算データは、目的地までのルート探索に用いられる。経路誘導データは、設定された経路に従って自車両1を目的地まで誘導するために用いられ、交差点名称や道路名称などを表す。道路データは、道路の形状や種別を表す。背景データは、河川や鉄道などの道路以外の地図形状や、各種施設の位置などを表す。
【0021】
GPS受信部105は、GPS衛星から送信されるGPS信号を受信して制御部101へ出力する。GPS信号には、自車両1の位置と現在時刻を求めるための情報として、そのGPS信号を送信したGPS衛星の位置と送信時刻が含まれている。したがって、所定数以上のGPS衛星からGPS信号を受信することにより、これらの情報に基づいて自車両1の現在位置と現在時刻を算出することができる。
【0022】
表示モニタ106は、ナビゲーション装置10において様々な画面表示を行うための装置であり、液晶ディスプレイ等を用いて構成される。この表示モニタ106により、前述したように自車両1の周辺について地図が表示され、その地図上に自車位置マークと他車位置マークが表示されると共に、通信エリアが表示される。表示モニタ106に表示される画面の内容は、制御部101が行う画面表示制御によって決定される。表示モニタ106は、たとえば自車両1のダッシュボード上やインストルメントパネル内など、ユーザが見やすいような位置に設置されている。
【0023】
入力装置107は、ナビゲーション装置10を動作させるための様々な入力操作をユーザが行うための装置であり、各種の入力スイッチ類を有している。ユーザはこの入力装置107を操作することにより、たとえば、目的地に設定したい施設や地点の名称等を入力したり、予め登録された登録地の中から目的地を選択したり、地図を任意の方向にスクロールしたりすることができる。入力装置107は、操作パネルやリモコンなどによって実現することができる。あるいは、表示モニタ106と一体化されたタッチパネルにより入力装置107を実現してもよい。
【0024】
ユーザが入力装置107を操作して目的地を設定すると、ナビゲーション装置10は、前述の経路計算データに基づいて所定のアルゴリズムの演算を行うことにより、目的地までの推奨経路を探索する。そして、自車両1の現在位置を検出し、その周辺の道路地図を表示しながら、探索された推奨経路に従って自車両1を目的地まで誘導する。
【0025】
ナビゲーション装置10が地図上に自車位置マークと他車位置マークを表示し、さらに通信エリアを表示する際の処理のフローチャートを図3に示す。このフローチャートは、制御部101において所定の処理サイクル間隔で実行される。
【0026】
ステップS10において、制御部101は、自車位置の検出を行う。ここでは前述したように、振動ジャイロ102および車速センサ103の検出結果に基づいて、自車両1の位置を検出する。なお、このときHDD104に記録された地図データに基づいてマップマッチングを行うことにより、自車両1が地図上でどの道路を走行しているかを判断し、その判断結果を反映して自車位置を検出してもよい。これにより、自車両1が走行している道路に合わせて自車位置を補正することができる。ステップS20において、制御部101は、ステップS10で検出した自車位置に基づいて、表示モニタ106に表示されている地図上に自車位置マークを表示する。
【0027】
ステップS30において、制御部101は、他車位置情報と他車速度情報を取得する。ここでは前述のように、通信制御装置12を用いて自車両1と他車両2との間で行われる車々間通信により、他車両2の位置を示す他車位置情報と、他車両2の速度を示す他車速度情報とが他車両2から送信され、通信制御装置12によって受信される。こうして受信された他車位置情報および他車速度情報が通信制御装置12から制御部101に対して出力されることにより、制御部101は他車位置情報と他車速度情報を取得する。なお、車々間通信による他車位置情報および他車速度情報の送信は、各車両からそれぞれ所定の送信タイミングごとに繰り返し行われる。
【0028】
ステップS40において、制御部101は、ステップS30で取得した他車位置情報に基づいて、表示モニタ106に表示されている地図上に他車位置マークを表示する。このとき地図データに基づいてマップマッチングを行うことで、他車両2が地図上でどの道路を走行しているかを判断し、その判断結果を反映して他車両2の位置を道路に合わせて補正してもよい。
【0029】
ステップS50において、制御部101は、ステップS30で他車位置情報を取得した他車両2の台数、すなわち通信制御装置12により位置情報を受信された他車両2の台数が、所定数以上であるか否かを判定する。このような他車両2の台数が所定数以上、たとえば3台以上である場合はステップS60へ進み、所定数未満である場合はステップS140へ進む。
【0030】
ステップS60において、制御部101は、ステップS30で他車位置情報を取得した他車両2のうちでいずれかを選択する。ここで選択した他車両2を、以下の説明では選択車両と称する。ステップS70において、制御部10は、ステップS30で取得した選択車両の他車速度情報に基づいて、選択車両の速度が所定値以上であるか否かを判定する。他車速度情報が示す選択車両の速度が所定値以上であればステップS80へ進み、所定値未満であればステップS100へ進む。これにより、所定速度以下で走行している車両や停止している車両の位置情報をステップS90の採用対象から除外し、その位置情報に基づいて通信エリアが特定されないようにする。
【0031】
ステップS80において、制御部101は、ステップS30で取得した選択車両の他車位置情報が、今回の送信タイミングにおいて通信制御装置12により新たに受信されたものであるか否かを判定する。通信制御装置12が選択車両の他車位置情報を今回新たに受信した場合は、ステップS90へ進む。そうでない場合、すなわち通信制御装置12が選択車両の他車位置情報を前回も受信していた場合は、ステップS100へ進む。
【0032】
ステップS90において、制御部101は、選択車両の位置情報を通信エリアの特定に用いるための位置情報として採用する。ここで採用された選択車両の位置情報は、後で説明するステップS130において、無線通信による車々間通信の通信エリアを特定する際に用いられる。なお、ナビゲーション装置10の始動直後は、ステップS30で取得した全ての位置情報が今回の送信タイミングにおいて新たに受信されたものである。したがって、ステップS70およびS80の判定結果に関わらず、ステップS90ではいずれの位置情報も採用しないことが好ましい。
【0033】
ステップS100において、制御部101は、ステップS30で他車位置情報を取得した他車両2の全てをステップS60において選択したか否かを判定する。全ての他車両2を選択車両として選択済みである場合はステップS110へ進み、未選択の他車両2がある場合はステップS60へ戻って前述のような処理を繰り返す。これにより、通信制御装置12が車々間通信で他車位置情報を受信した全ての他車両2が選択されるまで、ステップS60〜S100の処理が繰り返し実行される。
【0034】
ステップS110において、制御部101は、前回の送信タイミングでは通信制御装置12により他車位置情報が受信されたが、今回の送信タイミングでは受信されなかった他車両2があるか否かを判定する。いずれかの他車両2について通信制御装置12が他車位置情報を前回受信して今回受信しなかった場合は、ステップS120へ進む。すなわち、これまでは無線通信による車々間通信が可能であったが、今回不可能となった他車両2が存在する場合は、ステップS120へ進む。一方、このような他車両2が存在しない場合は、ステップS130へ進む。
【0035】
ステップS120において、制御部101は、ステップS110の判定条件を満たす他車両2の位置情報を、前述のステップS90と同様に通信エリアの特定に用いるための位置情報として採用する。
【0036】
ステップS130において、制御部101は、ステップS90およびステップS120で採用した位置情報に基づいて、無線通信による車々間通信の通信エリアを特定する。ここでは、採用した位置情報に基づいて特定される複数の他車両2の位置をつなぎ合わせ、これを通信エリアとする。こうして通信エリアを特定したら、ステップS150へ進む。
【0037】
一方、ステップS50からステップS140へ進んだ場合、ステップS140において制御部101は、予め定められた車々間通信の無線通信能力に応じて通信エリアを特定する。すなわち、他車両2の通信制御装置22が他車位置情報を自車両1へ送信する際の空中線電力や、アンテナ23およびアンテナ13の利得、通信制御装置11の最小受信感度などに基づいて、通信エリアを特定する。このようにして通信エリアを特定したら、ステップS150へ進む。
【0038】
ステップS150において、制御部101は、ステップS130またはS140において特定した通信エリアを表示モニタ106に表示されている地図上に表示する。なお、ステップS150で表示した通信エリアを、自車両1の移動に応じて地図上で移動させるようにしてもよい。ステップS150を実行したら、制御部101は図3のフローチャートを終了する。
【0039】
以上説明したような処理を実行することにより、自車位置マークと他車位置マークが表示されると共に、通信エリアが表示された地図画面の例を図4に示す。図4(a)は、ステップS130で特定された通信エリアが表示された地図画面の例であり、図4(b)は、ステップS140で特定された通信エリアが表示された地図画面の例である。
【0040】
図4(a)の地図画面では、自車位置マーク111の周囲に通信エリア120が表示されている。他車位置マーク211〜218のうち、実線で示す他車位置マーク211〜216は、今回の送信タイミングにおいて通信制御装置12により受信された他車位置情報に基づいてその位置が特定される。そのうち他車位置マーク211〜214は、他車位置情報が前回の送信タイミングでは受信されず、今回の送信タイミングで新たに受信されたものである。一方、破線で示す他車位置マーク217、218は、他車位置情報が前回の送信タイミングでは受信されていたが、今回の送信タイミングで受信されなくなったものである。これらの他車位置マーク211〜214および217、218を結ぶことにより、通信エリア120が特定される。なお、図4(a)では他車位置マーク217、218を破線で示しているが、実際の地図画面ではこれらの他車位置マークは表示されない。
【0041】
図4(b)の地図画面では、自車位置マーク111の周囲に、予め定められた車々間通信の無線通信能力に応じた円形の通信エリア130が表示されている。この通信エリア130の中に、他車位置マーク219、220が表示されている。なお、ここでは建物等による影響を考慮せずに通信エリア130を決定しているたが、これを考慮して通信エリア130を決定してもよい。たとえば、地図データに基づいて自車位置マーク111の付近に高い建物があるか否かを判定し、高い建物がある場合は、その建物の陰になる部分を通信エリア130から除外する。
【0042】
以上説明した実施の形態によれば、次の作用効果を奏する。
(1)車載地図表示装置であるナビゲーション装置10は、他車両2から無線通信により送信された他車両2の位置情報(他車位置情報)を受信する通信制御装置12と接続されている。ナビゲーション装置10は、制御部101の処理により、通信制御装置12により受信された他車位置情報に基づいて、他車両2の位置を示す他車位置マークを地図上に表示する(ステップS40)と共に、無線通信の通信エリアを特定する(ステップS130)。こうして特定された通信エリアを地図上に表示する(ステップS150)。このようにしたので、他車両からのデータを受信可能な範囲が地図上で分かる。
【0043】
(2)ステップS130において、制御部101は、通信制御装置12における他車位置情報の受信状況の変化に応じて通信エリアを特定する。すなわち、通信制御装置12が他車位置情報を前回受信して今回受信しなかったか否かを判定し(ステップS110)、これを満たす他車位置情報がある場合は採用する(ステップS120)。また、通信制御装置12が他車位置情報を今回新たに受信したか否かを判定し(ステップS80)、これを満たす他車位置情報がある場合は採用する(ステップS90)。ステップS130では、こうして採用した他車位置情報に基づいて通信エリアを特定する。このようにしたので、実際の受信状況を反映して通信エリアを特定し、地図上に表示することができる。
【0044】
(3)通信制御装置12は、他車両2の速度情報(他車速度情報)をさらに受信する。ステップS130において、制御部101は、通信制御装置12により受信された他車速度情報に基づいて、通信エリアの特定に用いる他車位置情報を決定する。すなわち、通信制御装置12により受信された他車速度情報が示す他車両2の速度が所定値以上であるか否かを判定し(ステップS70)、所定値未満である場合は、当該他車両2の他車位置情報をステップS90の採用対象から除外する。ステップS130では、採用対象から除外されなかった他車位置情報に基づいて通信エリアを特定する。このようにしたので、所定速度以下で走行している車両や停止している車両の位置情報を採用対象から除外し、その位置情報に基づいて通信エリアが特定されないようにすることができる。したがって、より一層実際の受信状況を反映して通信エリアを特定し、地図上に表示することができる。
【0045】
(4)制御部101は、通信制御装置12により他車位置情報を受信された他車両2の台数に応じて、通信エリアの特定方法を切り替える。すなわち、通信制御装置12により他車位置情報を受信された他車両2の台数が所定数以上であるか否かを判定し(ステップS50)、所定値未満である場合は、予め設定された無線通信の能力に応じて通信エリアを特定する(ステップS140)。一方、通信制御装置12により他車位置情報を受信された他車両2の台数が所定数以上である場合は、他車位置情報に基づいて通信エリアを特定する(ステップS130)。このようにしたので、車々間通信可能な他車両の台数が少ない場合であっても、通信エリアを特定して地図上に表示することができる。
【0046】
(5)通信制御装置12は、自車両1と他車両2との間で行われる車々間通信により、他車両2の位置情報を取得する。このようにしたので、他車両の正確な位置情報を容易に取得することができる。
【0047】
以上説明した実施の形態では、ナビゲーション装置10により、図3のフローチャートに示す処理を実行する例を説明したが、本発明はこれに限定されず、様々な車載電子装置に適用することができる。
【0048】
以上説明した実施の形態や各種の変形例は、あくまで一例である。したがって、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【0049】
以上説明した実施の形態では、特許請求の範囲に記載された各手段を、ナビゲーション装置10の制御部101において実行される処理によりそれぞれ実現することとした。すなわち、ナビゲーション装置10の制御部101は、他車位置表示手段、通信エリア特定手段および通信エリア表示手段として機能する。なお、以上の説明はあくまで一例であり、発明を解釈する際、各実施の形態の記載事項と特許請求の範囲の記載事項の対応関係には何ら限定も拘束もされない。
【図面の簡単な説明】
【0050】
【図1】本発明の一実施の形態による車両制御システムの構成図である。
【図2】ナビゲーション装置の構成図である。
【図3】地図上に自車位置マークと他車位置マークを表示し、さらに通信エリアを表示する際の処理のフローチャートである。
【図4】通信エリアが表示された地図画面の例を示す図である。
【符号の説明】
【0051】
1:自車両 2:他車両
10,20:ナビゲーション装置 11,21:車両制御装置
12,22:通信制御装置 13,23:アンテナ
101:制御部 102:振動ジャイロ
103:車速センサ 104:HDD
105:GPS受信部 106:表示モニタ
107:入力装置
【特許請求の範囲】
【請求項1】
無線通信により送信された他車両の位置情報を受信する無線装置と接続された車載地図表示装置であって、
前記無線装置により受信された位置情報に基づいて、前記他車両の位置を地図上に表示する他車位置表示手段と、
前記無線装置により受信された位置情報に基づいて、前記無線通信の通信エリアを特定する通信エリア特定手段と、
前記通信エリア特定手段により特定された通信エリアを前記地図上に表示する通信エリア表示手段とを備えることを特徴とする車載地図表示装置。
【請求項2】
請求項1に記載の車載地図表示装置において、
前記通信エリア特定手段は、前記無線装置における前記位置情報の受信状況の変化に応じて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項3】
請求項2に記載の車載地図表示装置において、
前記位置情報は繰り返し送信され、
前記無線装置が前記位置情報を前回受信して今回受信しなかった場合、または、前記無線装置が前記位置情報を今回新たに受信した場合に、前記通信エリア特定手段は、前記位置情報に基づいて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、前記他車両の速度情報をさらに受信し、
前記通信エリア特定手段は、前記無線装置により受信された速度情報に基づいて、前記通信エリアの特定に用いる位置情報を決定することを特徴とする車載地図表示装置。
【請求項5】
請求項4に記載の車載地図表示装置において、
前記無線装置により受信された速度情報が示す前記他車両の速度が所定値未満である場合、前記通信エリア特定手段は、当該他車両の位置情報を除外して前記無線通信の通信エリアを特定することを特徴とする車載地図表示装置。
【請求項6】
請求項1〜5のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、複数の他車両からそれぞれ送信される位置情報を受信し、
前記通信エリア特定手段は、前記無線装置により位置情報を受信された他車両の台数に応じて、前記通信エリアの特定方法を切り替えることを特徴とする車載地図表示装置。
【請求項7】
請求項6に記載の車載地図表示装置において、
前記通信エリア特定手段は、前記無線装置により位置情報を受信された他車両が所定数未満である場合は、予め設定された前記無線通信の能力に応じて前記通信エリアを特定し、前記無線装置により位置情報を受信された他車両が前記所定数以上である場合は、前記位置情報に基づいて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項8】
請求項1〜7のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、自車両と前記他車両との間で行われる車々間通信により、前記他車両の位置情報を受信することを特徴とする車載地図表示装置。
【請求項9】
請求項1〜8のいずれか一項に記載の車載地図表示装置と無線装置とを有する車両制御システム。
【請求項1】
無線通信により送信された他車両の位置情報を受信する無線装置と接続された車載地図表示装置であって、
前記無線装置により受信された位置情報に基づいて、前記他車両の位置を地図上に表示する他車位置表示手段と、
前記無線装置により受信された位置情報に基づいて、前記無線通信の通信エリアを特定する通信エリア特定手段と、
前記通信エリア特定手段により特定された通信エリアを前記地図上に表示する通信エリア表示手段とを備えることを特徴とする車載地図表示装置。
【請求項2】
請求項1に記載の車載地図表示装置において、
前記通信エリア特定手段は、前記無線装置における前記位置情報の受信状況の変化に応じて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項3】
請求項2に記載の車載地図表示装置において、
前記位置情報は繰り返し送信され、
前記無線装置が前記位置情報を前回受信して今回受信しなかった場合、または、前記無線装置が前記位置情報を今回新たに受信した場合に、前記通信エリア特定手段は、前記位置情報に基づいて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、前記他車両の速度情報をさらに受信し、
前記通信エリア特定手段は、前記無線装置により受信された速度情報に基づいて、前記通信エリアの特定に用いる位置情報を決定することを特徴とする車載地図表示装置。
【請求項5】
請求項4に記載の車載地図表示装置において、
前記無線装置により受信された速度情報が示す前記他車両の速度が所定値未満である場合、前記通信エリア特定手段は、当該他車両の位置情報を除外して前記無線通信の通信エリアを特定することを特徴とする車載地図表示装置。
【請求項6】
請求項1〜5のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、複数の他車両からそれぞれ送信される位置情報を受信し、
前記通信エリア特定手段は、前記無線装置により位置情報を受信された他車両の台数に応じて、前記通信エリアの特定方法を切り替えることを特徴とする車載地図表示装置。
【請求項7】
請求項6に記載の車載地図表示装置において、
前記通信エリア特定手段は、前記無線装置により位置情報を受信された他車両が所定数未満である場合は、予め設定された前記無線通信の能力に応じて前記通信エリアを特定し、前記無線装置により位置情報を受信された他車両が前記所定数以上である場合は、前記位置情報に基づいて前記通信エリアを特定することを特徴とする車載地図表示装置。
【請求項8】
請求項1〜7のいずれか一項に記載の車載地図表示装置において、
前記無線装置は、自車両と前記他車両との間で行われる車々間通信により、前記他車両の位置情報を受信することを特徴とする車載地図表示装置。
【請求項9】
請求項1〜8のいずれか一項に記載の車載地図表示装置と無線装置とを有する車両制御システム。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−198236(P2009−198236A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−38536(P2008−38536)
【出願日】平成20年2月20日(2008.2.20)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月20日(2008.2.20)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]