
車載型地中レーダ計測装置のシステム同期方法
【課題】計測した地中レーダデータとGPSによる位置情報及び取得位置のデジタルビデオ映像を正確にリンクさせ、任意の場所の情報を正確に容易に取り出せるようにする。
【解決手段】地中レーダ計測装置において、基準となる時間パルスと距離計に基づく距離パルスを発生する時間・距離信号コントローラを用い、地中レーダ装置は、距離計からの距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行い、時間パルスと共に地中レーダデータとして記録するように構成され、時間パルス発信時に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録する同期ファイルを生成し、時間パルスを媒介として、計測した地中レーダデータとGPSによる位置情報及び取得位置のビデオ映像をリンクさせ対応付けを図る。
【解決手段】地中レーダ計測装置において、基準となる時間パルスと距離計に基づく距離パルスを発生する時間・距離信号コントローラを用い、地中レーダ装置は、距離計からの距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行い、時間パルスと共に地中レーダデータとして記録するように構成され、時間パルス発信時に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録する同期ファイルを生成し、時間パルスを媒介として、計測した地中レーダデータとGPSによる位置情報及び取得位置のビデオ映像をリンクさせ対応付けを図る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、路面下に存在する空洞、埋設物、構造物などの地中構造を、路面上を走行しながら探査する地中レーダ装置による計測技術に関し、更に詳しく述べると、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせ、任意の場所の情報を正確に且つ容易に取り出せるようにした車載型地中レーダ計測装置のシステム同期方法に関するものである。
【背景技術】
【0002】
道路構造物の機能を維持し交通に支障のない状態にしておくためには、常に適切な維持管理を行うことが必要である。舗装構造をはじめとする道路構造物を効率的に調査する方法として、従来から地中レーダ探査が広く利用されている。この地中レーダ探査は、高周波数の電磁波を用いて非破壊で地下構造を高速・高精度で可視化する手法であり、道路構造物では路面下の空洞や人工的な埋設物(埋設管など)の調査に利用されている。
【0003】
道路構造物は長い距離に及ぶことから、地中レーダ計測装置を車両に搭載し、路面上を走行しながら、路面下の空洞や埋設管などの地中構造を探査することが行われている(特許文献1参照)。位置の特定は、地中レーダ装置を搭載した空洞探査車の位置検出装置によって行う。この先行技術では、位置検出装置は、車両の距離計と、車両の側方の状況を撮影する第1のビデオカメラ、車両の前方を撮影する第2のビデオカメラと、第1及び第2のビデオカメラで撮影した映像情報を記録するビデオレコーダとからなるビデオシステムから構成される。距離計による距離情報は、ビデオレコーダに入力されると共に、地中レーダ装置のデータレコーダにも記録される。
【0004】
しかし、従来の車載型地中レーダ計測装置では、距離計の距離情報とビデオデータと地中レーダデータが正確にリンクしておらず、大雑把な関係は分かるものの、ビデオ映像から場所を特定しても、その場所に厳密に対応する地中レーダデータを取得することはできず、逆に地中レーダデータを指定しても、その取得地点を厳密に割り出すことはできなかった。つまり、従来技術では、距離情報やビデオデータは、あくまでも地中レーダデータの取得位置を見出すための目安に過ぎず、正確な位置情報を得ることが困難であった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−87945号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、路面下の空洞、埋設物、構造物などの地中構造を、路面上を走行しながら探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びレーダデータ取得位置のデジタルビデオ映像を正確にリンクさせ、任意の場所の情報を正確に且つ容易に取り出すことができるようにすることである。
【課題を解決するための手段】
【0007】
本発明は、地中レーダ装置、距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法であって、基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用い、前記地中レーダ装置は、前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行って、前記時間パルスと共に地中レーダデータとして記録するように構成され、前記時間パルス毎に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成し、前記時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを対応付けるようにしたことを特徴とする車載型地中レーダ計測装置のシステム同期方法である。
【0008】
ここで、時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置を、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
の両方から求める。また、任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間は、時間パルスのレーダ波形トレース位置を用いて線形補間により求める。更に、ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を対応させる。
【発明の効果】
【0009】
本発明に係る車載型地中レーダ計測装置のシステム同期方法は、時間・距離信号コントローラを用いて同期ファイルを生成し、計測後に該同期ファイルを用いてソフトウエア上の処理を行うことによって、計測された地中レーダデータの、GPSによる位置情報及びビデオカメラの映像による位置再現性を効率よく且つ高精度で行うことができる。これにより路面下の空洞、埋設管、地中構造物の正確な位置情報が得られ、それをもとに、探査結果をデータベース化することで、過年度の探査結果との比較が可能になる。そのため、空洞の発達の様子を検討したり、探査後の詳細調査地点の選定も効率的に実施することが可能となる。
【図面の簡単な説明】
【0010】
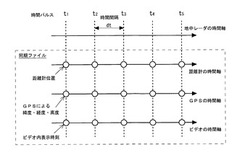
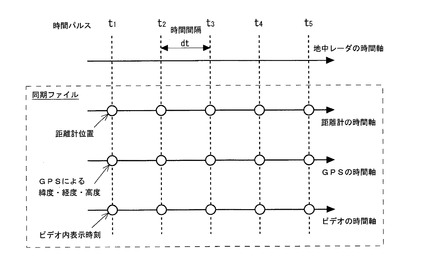
【図1】本発明に係る車載型地中レーダ計測装置のシステム同期方法の概念図。
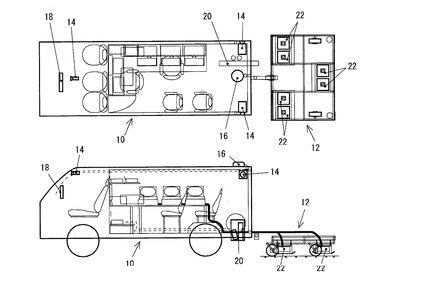
【図2】地中レーダ計測装置を搭載した路面下探査車の説明図。
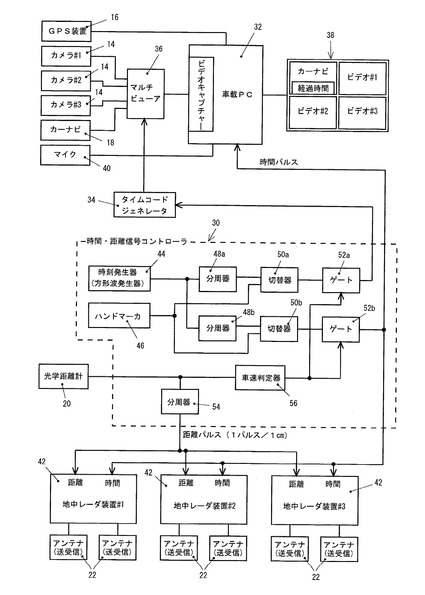
【図3】時間・距離信号コントローラを組み込んだ地中レーダ計測装置の一実施例を示すブロック図。
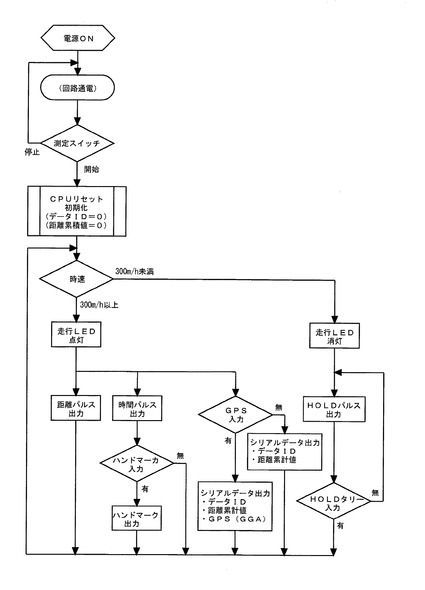
【図4】時間・距離信号コントローラの処理フロー。
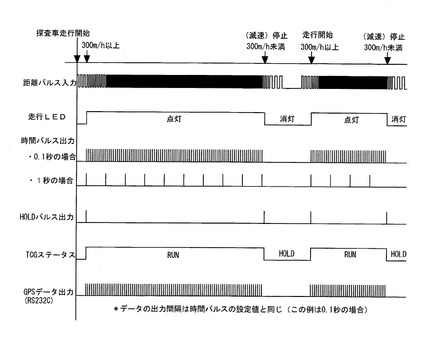
【図5】時間・距離信号コントローラと各機器とのタイミングチャート。
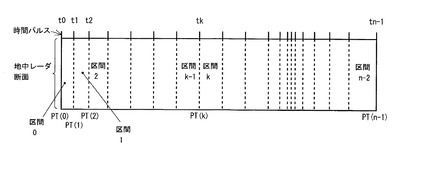
【図6】時間パルス情報を含んだ地中レーダデータの概念図。
【発明を実施するための形態】
【0011】
本発明は、地中レーダ装置、光学距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ(TCG)、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法である。
【0012】
本発明では、基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用いる。前記地中レーダ装置は、距離計に基づく前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行う。それらのレーダ波形トレースは、時間・距離信号コントローラからの前記時間パルスと共に地中レーダデータとして記録するように構成される。従って、地中レーダデータでは、計測開始からの累積レーダ波形トレース数と累積距離が1対1で対応することから、時間パルス記録位置におけるレーダ波形トレース位置は、あらかじめ設定した単位距離毎のレーダ波形トレース数を用いて求めることができる。他方、車載PCにて、図1に示すように、前記時間・距離信号コントローラからの時間パルス発信時t1,t2,・・・に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成する。つまり、同期ファイルでは、ある時刻での距離計位置、ビデオ内表示時刻、GPSによる経度、緯度、高度が、一定の時間間隔dtで記録されることになる。従って、計測後にソフトウエア上の処理によって、時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを一定の時間間隔dtで同期させることができ、相互のデータ間での正確な対応付けが可能となる。
【0013】
ここで、時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置は、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
のいずれか一方から求めることができる。しかし、地中レーダデータへの時間パルス記録の欠損があった場合、上記(1)のみでは誤差が生じるため、上記(1)と(2)の両方を採用することで信頼性を高めることができる。
【0014】
任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間は、時間パルスのレーダ波形トレース位置を用いて線形補間により求めることができる。また、ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を正確に対応させることができる。
【0015】
これによって、計測された地中レーダデータの、GPSによる位置情報、及びビデオカメラ映像による位置の再現を効率的に且つ高精度で行うことが可能となる。
【実施例】
【0016】
図2は、本発明で用いる路面下探査車の一例であり、各機器の配置状況を平面と側面とで示している。この路面下探査車は、自走する機器搭載車両10と、それに牽引されるアンテナ搭載車両12とからなる。機器搭載車両10は、前方及び左右両側方を撮影する合計3台のデジタルビデオカメラ14、GPS装置16、カーナビゲーションシステム(カーナビ)18、非接触で測定可能な光学距離計20、及びその他必要な各種制御機器やディスプレイ、記録機器(ハードディスク)、車載PC(パソコン)などを装備しており、運転者の他、測定者などが搭乗する。他方、アンテナ搭載車両12は、1車線全体を一度に測定できるように、低背の台車の左右及び中央に6組の送受信アンテナ22を配置し、機器搭載車両10と接続されている電気ケーブルによって電力の供給を受けると共に信号の授受が行われる構成である。ここでアンテナ搭載車両12をトレーラ形式としているのは、機器搭載車両に組み込み一体化するよりも車両及び機器からのノイズが低減されるためためである。
【0017】
本発明における地中レーダ計測装置の概略構成を図3に示す。破線で囲まれている部分が、本発明で使用している時間・距離信号コントローラ30である。
【0018】
まず、周辺の機器構成から説明する。GPS装置16からの位置情報(緯度、経度、高度)及び累積距離が車載PC32に送信される。前方及び左右両側方の高感度カメラシステム14からのデジタルビデオ映像及びカーナビ18からの地図情報、タイムコードジェネレータ(TCG)34からの経過時間情報はマルチビューワ36を介してビデオキャプチャー機能を備えた前記車載PC32に送られる。これら3つのビデオ画像とカーナビ画像は4分割画面となって液晶ディスプレイ38に表示され、タイムコードジェネレータ34による経過時間も液晶ディスプレイ38に表示される。また、マイク40からの音声情報も、車載PC32に記録される。
【0019】
地中レーダ測定系は、3台の地中レーダ装置42に、それぞれ各2台のアンテナ22が接続された構成である。アンテナはボウタイ型でもよいし、ホーン型でもよい。各地中レーダ装置42は、それぞれ指定したタイミングで測定し、得られたレーダ波形トレースを地中レーダデータとして記録するハードディスク(HDD)が設けられている。
【0020】
時間・距離信号コントローラ30は、内部の時刻発生器44で生じる方形波によって所望の周期で時間パルスを発生し、また光学距離計20からの出力パルスを利用して距離パルスを発生し、システムの動作タイミングを制御する。更に、手動により任意の時刻にハンドマークを出力可能なハンドマーカ46を備えている。時刻発生器44からの方形波パルスは、周期可変の分周器48a,48bに入力し、所望の周期の時間パルス(例えば0.5秒毎に生成する)として切替器50a,50bに入力する。ハンドマーカ46から発生したハンドマークも前記切替器50a,50bに入力する。これらの切替器50a,50bでは、時間パルスとハンドマークとの切替を行う。そして、いずれか一方の信号がゲート52a,52bに入力する。光学距離計20からの出力パルスは分周器54で分周され、例えば移動距離1cm当たり1パルスの距離パルスが生じるように調整されて、前記地下レーダ装置42に入力する。地下レーダ装置42は、この距離パルスのタイミングでレーダ波形収録を行い、計測結果を地中レーダデータとしてハードディスクに記録する。
【0021】
光学距離計20の出力パルスの時間間隔によって車速判定器56で車速判定を行い、その結果が前記ゲート52a,52bの制御信号となる。例えば時速300m以上でゲートをON、時速300m未満でゲートをOFFにする。従って、時速300m未満では時間パルスは出力しない。一方のゲート52aから出力した時間パルス(及びハンドマーク)は、タイムコードジェネレータ34に入力し、タイムコード(経過時間)に変換され、デジタルビデオ映像にスーパーインポーズされて記録され表示される。また、他方のゲート52bから出力した時間パルス(及びハンドマーク)は、地中レーダ装置42に入力して地中レーダデータに時間パルスを加えた形で記録すると共に、車載PC32に入力して、そのタイミングで、GPS装置で計測された累積距離情報及びGPS位置情報、ビデオ内表示時刻の取り込みを行い、時間パルスの累積個数も含めて同期ファイルが作成される。
【0022】
図4に時間・距離信号コントローラとGPS装置の処理フローを、図5には時間・距離信号コントローラと各機器とのタイミングチャートを示す。時間・距離信号コントローラでは、光学距離計からの信号を受け、車速判定器で時速300m以上の車速を検知すると各種データの取得を開始する。走行LEDが点灯し、地中レーダ装置は、光学距離計からの距離パルスを受けて、あらかじめ設定された通りに単位距離毎に一定数のデータ(例えば計測距離1m毎に20レーダ波形トレース)を取得する。時速300m未満では、走行LEDは消灯しHOLD状態となり、地中レーダ装置による計測が停止すると共に、車載PCによる同期ファイルの記録も停止する。この間、ビデオカメラ映像の記録は継続し、タイムコードジェネレータによる経過時間のビデオカメラ内へのスーパーインポーズも動作を継続する。なお、走行時には、GPS入力があれば距離累計値とGPS位置情報を出力し、GPS入力がなければ距離累計値のみを出力する。
【0023】
時間・距離信号コントローラからは一定時間間隔dtで時間パルスが発信される。発信された時間パルスは地中レーダデータに記録されると共に、時間パルス発信時における下記の情報が、同期ファイルとして車載PCに保存される。
(a)時間パルスの累積個数
(b)時間パルスが発信された時の累積距離
(c)時間パルスが発信された時のビデオカメラ映像に写し込まれたスーパーインポーズ時間
(d)時間パルスが発信された時のRTK−GPSによる位置情報
【0024】
このようにして、時間・距離信号コントローラからの時間パルスのタイミングで記録された同期ファイルを用いて、以下の手順で専用ソフトウエア上の処理を行い、レーダ波形トレース位置と、GPS座標、デジタルビデオファイル再生位置を対応づける。
【0025】
図6に、時間・距離信号コントローラからの時間パルス情報を含んだ地中レーダデータの概念図を示す。時間パルスの間隔が狭くなっている部分は車速が遅くなっている状態、時間パルスの間隔が広くなっている部分は車速が速くなっている状態、時間パルスが等間隔の部分は一定速度で走行している状態ということになる。地中レーダデータでは、計測開始からの累積レーダ波形トレース数と光学距離計による距離データは1対1で対応することから、時間パルス記録位置におけるレーダ波形トレース位置は、あらかじめ設定した単位距離毎のレーダ波形トレース数を用いることで求められる。時間・距離信号コントローラからの信号に基づき、システム同期用に記録される情報は以下の通りである。
Glat(k):GPS座標・緯度
Glon(k):GPS座標・経度
Galt(k):GPS座標・高度
D(k) :光学式距離センサの位置
TI(k) :ビデオカメラ映像内のスーパーインポーズ時間
【0026】
任意のレーダ波形トレース位置とGPS座標及びスーパーインポーズ時間との対応付けは、以下の手順で行う。
【0027】
(1)地中レーダデータより、レーダ波形トレース位置PT(k) を次の方法で求める。
(1−1)地中レーダデータ内の時間パルスの累積個数から求める。先頭からk+1個目にあるパルスのレーダ波形トレース位置PT(k) を、地中レーダデータの先頭から時間パルス数を累積する。
(1−2)時間パルス発信時の距離計位置D(k) から、
PT(k) =D(k) ・s
s:単位距離毎のレーダ波形トレース数
で求める。地中レーダデータへの時間パルス記録の欠損があった場合、上記(1−1)のみでは誤差が生じるため、2種類の異なる方法を採用することで測定の信頼性を高めることができる。
【0028】
(2)任意のレーダ波形トレース番号X∈PT(0)≦X≦PT(n-1)について、それぞれのレーダ波形トレース位置でのGPS位置情報[経度TGlat(X)、緯度TGlon(X)、高度TGalt(X)]と、スーパーインポーズ時間TTI(X) を、次式のようにしてパルス位置での値を用いて線形補間する。
区間k∈PT(k) ≦X≦PT(k+1)について、
TGlat(X)=A1・X+B1
A1=[Glat(k+1)−Glat(k)]/[PT(k+1)−PT(k-1)]
B1=[PT(k+1)・Glat(k)−PT(k)・Glat(k+1)]/[PT(k+1)−PT(k)]
TGlon(X)=A2・X+B2
A2=[Glon(k+1)−Glon(k)]/[PT(k+1)−PT(k-1)]
B2=[PT(k+1)・Glon(k)−PT(k)・Glon(k+1)]/[PT(k+1)−PT(k)]
TGalt(X)=A3・X+B3
A3=[Galt(k+1)−Galt(k)]/[PT(k+1)−PT(k-1)]
B3=[PT(k+1)・Galt(k)−PT(k)・Galt(k+1)]/[PT(k+1)−PT(k)]
TTI(X)=A4・X+B4
A4=[TI(k+1)−TI(k)]/[PT(k+1)−PT(k-1)]
B4=[PT(k+1)・TI(k)−PT(k)・TI(k+1)]/[PT(k+1)−PT(k)]
【0029】
レーダ波形トレース位置とデジタルビデオファイルとの対応付けは、以下の手順で任意のレーダ波形トレース位置でのデジタルビデオ再生位置を取得することにより行う。
(1)ビデオ再生開始位置でのスーパーインポーズ時刻TIsを、ビデオ画像から取得する。
(2)ビデオ再生終了位置でのスーパーインポーズ時刻TIeを、ビデオ画像から取得する。
(3)デジタルビデオファイルの再生時間長VLを取得する。
(4)任意のレーダ波形トレース位置Xでのビデオ内スーパーインポーズ時刻TI(X)から、次式を用いて対応するデジタルビデオ再生位置VT(X)を計算する。
VT(X)=(TI(X)−TIs)・a
但し、a=VL/(TIe−TIs)
この補正係数aは、ビデオ内スーパーインポーズ時刻が進む速度とビデオ再生速度が僅かに異なる場合があるため、同期精度を向上するために設定している。
【0030】
このように路面上を走行しながら探査する地中レーダ計測において、同期ファイルを作成し、時間パルスを組み込んだ地中レーダデータを用いることによって、計測した地中レーダデータとGPSによる位置情報及び取得位置のデジタルビデオ映像を正確にリンクさせ、路面下の空洞、埋設物、構造物などの地中構造について、任意の場所の情報を容易に取り出すことが可能となる。
【符号の説明】
【0031】
14 ビデオカメラ
16 GPS装置
18 カーナビ
20 光学距離計
22 アンテナ
30 時間・距離信号コントローラ
32 車載PC
34 タイムコードジェネレータ
36 マルチビューア
38 液晶ディスプレイ
42 地中レーダ装置
44 時刻発生器
【技術分野】
【0001】
本発明は、路面下に存在する空洞、埋設物、構造物などの地中構造を、路面上を走行しながら探査する地中レーダ装置による計測技術に関し、更に詳しく述べると、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせ、任意の場所の情報を正確に且つ容易に取り出せるようにした車載型地中レーダ計測装置のシステム同期方法に関するものである。
【背景技術】
【0002】
道路構造物の機能を維持し交通に支障のない状態にしておくためには、常に適切な維持管理を行うことが必要である。舗装構造をはじめとする道路構造物を効率的に調査する方法として、従来から地中レーダ探査が広く利用されている。この地中レーダ探査は、高周波数の電磁波を用いて非破壊で地下構造を高速・高精度で可視化する手法であり、道路構造物では路面下の空洞や人工的な埋設物(埋設管など)の調査に利用されている。
【0003】
道路構造物は長い距離に及ぶことから、地中レーダ計測装置を車両に搭載し、路面上を走行しながら、路面下の空洞や埋設管などの地中構造を探査することが行われている(特許文献1参照)。位置の特定は、地中レーダ装置を搭載した空洞探査車の位置検出装置によって行う。この先行技術では、位置検出装置は、車両の距離計と、車両の側方の状況を撮影する第1のビデオカメラ、車両の前方を撮影する第2のビデオカメラと、第1及び第2のビデオカメラで撮影した映像情報を記録するビデオレコーダとからなるビデオシステムから構成される。距離計による距離情報は、ビデオレコーダに入力されると共に、地中レーダ装置のデータレコーダにも記録される。
【0004】
しかし、従来の車載型地中レーダ計測装置では、距離計の距離情報とビデオデータと地中レーダデータが正確にリンクしておらず、大雑把な関係は分かるものの、ビデオ映像から場所を特定しても、その場所に厳密に対応する地中レーダデータを取得することはできず、逆に地中レーダデータを指定しても、その取得地点を厳密に割り出すことはできなかった。つまり、従来技術では、距離情報やビデオデータは、あくまでも地中レーダデータの取得位置を見出すための目安に過ぎず、正確な位置情報を得ることが困難であった。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−87945号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、路面下の空洞、埋設物、構造物などの地中構造を、路面上を走行しながら探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びレーダデータ取得位置のデジタルビデオ映像を正確にリンクさせ、任意の場所の情報を正確に且つ容易に取り出すことができるようにすることである。
【課題を解決するための手段】
【0007】
本発明は、地中レーダ装置、距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法であって、基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用い、前記地中レーダ装置は、前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行って、前記時間パルスと共に地中レーダデータとして記録するように構成され、前記時間パルス毎に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成し、前記時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを対応付けるようにしたことを特徴とする車載型地中レーダ計測装置のシステム同期方法である。
【0008】
ここで、時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置を、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
の両方から求める。また、任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間は、時間パルスのレーダ波形トレース位置を用いて線形補間により求める。更に、ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を対応させる。
【発明の効果】
【0009】
本発明に係る車載型地中レーダ計測装置のシステム同期方法は、時間・距離信号コントローラを用いて同期ファイルを生成し、計測後に該同期ファイルを用いてソフトウエア上の処理を行うことによって、計測された地中レーダデータの、GPSによる位置情報及びビデオカメラの映像による位置再現性を効率よく且つ高精度で行うことができる。これにより路面下の空洞、埋設管、地中構造物の正確な位置情報が得られ、それをもとに、探査結果をデータベース化することで、過年度の探査結果との比較が可能になる。そのため、空洞の発達の様子を検討したり、探査後の詳細調査地点の選定も効率的に実施することが可能となる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る車載型地中レーダ計測装置のシステム同期方法の概念図。
【図2】地中レーダ計測装置を搭載した路面下探査車の説明図。
【図3】時間・距離信号コントローラを組み込んだ地中レーダ計測装置の一実施例を示すブロック図。
【図4】時間・距離信号コントローラの処理フロー。
【図5】時間・距離信号コントローラと各機器とのタイミングチャート。
【図6】時間パルス情報を含んだ地中レーダデータの概念図。
【発明を実施するための形態】
【0011】
本発明は、地中レーダ装置、光学距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ(TCG)、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法である。
【0012】
本発明では、基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用いる。前記地中レーダ装置は、距離計に基づく前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行う。それらのレーダ波形トレースは、時間・距離信号コントローラからの前記時間パルスと共に地中レーダデータとして記録するように構成される。従って、地中レーダデータでは、計測開始からの累積レーダ波形トレース数と累積距離が1対1で対応することから、時間パルス記録位置におけるレーダ波形トレース位置は、あらかじめ設定した単位距離毎のレーダ波形トレース数を用いて求めることができる。他方、車載PCにて、図1に示すように、前記時間・距離信号コントローラからの時間パルス発信時t1,t2,・・・に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成する。つまり、同期ファイルでは、ある時刻での距離計位置、ビデオ内表示時刻、GPSによる経度、緯度、高度が、一定の時間間隔dtで記録されることになる。従って、計測後にソフトウエア上の処理によって、時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを一定の時間間隔dtで同期させることができ、相互のデータ間での正確な対応付けが可能となる。
【0013】
ここで、時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置は、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
のいずれか一方から求めることができる。しかし、地中レーダデータへの時間パルス記録の欠損があった場合、上記(1)のみでは誤差が生じるため、上記(1)と(2)の両方を採用することで信頼性を高めることができる。
【0014】
任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間は、時間パルスのレーダ波形トレース位置を用いて線形補間により求めることができる。また、ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を正確に対応させることができる。
【0015】
これによって、計測された地中レーダデータの、GPSによる位置情報、及びビデオカメラ映像による位置の再現を効率的に且つ高精度で行うことが可能となる。
【実施例】
【0016】
図2は、本発明で用いる路面下探査車の一例であり、各機器の配置状況を平面と側面とで示している。この路面下探査車は、自走する機器搭載車両10と、それに牽引されるアンテナ搭載車両12とからなる。機器搭載車両10は、前方及び左右両側方を撮影する合計3台のデジタルビデオカメラ14、GPS装置16、カーナビゲーションシステム(カーナビ)18、非接触で測定可能な光学距離計20、及びその他必要な各種制御機器やディスプレイ、記録機器(ハードディスク)、車載PC(パソコン)などを装備しており、運転者の他、測定者などが搭乗する。他方、アンテナ搭載車両12は、1車線全体を一度に測定できるように、低背の台車の左右及び中央に6組の送受信アンテナ22を配置し、機器搭載車両10と接続されている電気ケーブルによって電力の供給を受けると共に信号の授受が行われる構成である。ここでアンテナ搭載車両12をトレーラ形式としているのは、機器搭載車両に組み込み一体化するよりも車両及び機器からのノイズが低減されるためためである。
【0017】
本発明における地中レーダ計測装置の概略構成を図3に示す。破線で囲まれている部分が、本発明で使用している時間・距離信号コントローラ30である。
【0018】
まず、周辺の機器構成から説明する。GPS装置16からの位置情報(緯度、経度、高度)及び累積距離が車載PC32に送信される。前方及び左右両側方の高感度カメラシステム14からのデジタルビデオ映像及びカーナビ18からの地図情報、タイムコードジェネレータ(TCG)34からの経過時間情報はマルチビューワ36を介してビデオキャプチャー機能を備えた前記車載PC32に送られる。これら3つのビデオ画像とカーナビ画像は4分割画面となって液晶ディスプレイ38に表示され、タイムコードジェネレータ34による経過時間も液晶ディスプレイ38に表示される。また、マイク40からの音声情報も、車載PC32に記録される。
【0019】
地中レーダ測定系は、3台の地中レーダ装置42に、それぞれ各2台のアンテナ22が接続された構成である。アンテナはボウタイ型でもよいし、ホーン型でもよい。各地中レーダ装置42は、それぞれ指定したタイミングで測定し、得られたレーダ波形トレースを地中レーダデータとして記録するハードディスク(HDD)が設けられている。
【0020】
時間・距離信号コントローラ30は、内部の時刻発生器44で生じる方形波によって所望の周期で時間パルスを発生し、また光学距離計20からの出力パルスを利用して距離パルスを発生し、システムの動作タイミングを制御する。更に、手動により任意の時刻にハンドマークを出力可能なハンドマーカ46を備えている。時刻発生器44からの方形波パルスは、周期可変の分周器48a,48bに入力し、所望の周期の時間パルス(例えば0.5秒毎に生成する)として切替器50a,50bに入力する。ハンドマーカ46から発生したハンドマークも前記切替器50a,50bに入力する。これらの切替器50a,50bでは、時間パルスとハンドマークとの切替を行う。そして、いずれか一方の信号がゲート52a,52bに入力する。光学距離計20からの出力パルスは分周器54で分周され、例えば移動距離1cm当たり1パルスの距離パルスが生じるように調整されて、前記地下レーダ装置42に入力する。地下レーダ装置42は、この距離パルスのタイミングでレーダ波形収録を行い、計測結果を地中レーダデータとしてハードディスクに記録する。
【0021】
光学距離計20の出力パルスの時間間隔によって車速判定器56で車速判定を行い、その結果が前記ゲート52a,52bの制御信号となる。例えば時速300m以上でゲートをON、時速300m未満でゲートをOFFにする。従って、時速300m未満では時間パルスは出力しない。一方のゲート52aから出力した時間パルス(及びハンドマーク)は、タイムコードジェネレータ34に入力し、タイムコード(経過時間)に変換され、デジタルビデオ映像にスーパーインポーズされて記録され表示される。また、他方のゲート52bから出力した時間パルス(及びハンドマーク)は、地中レーダ装置42に入力して地中レーダデータに時間パルスを加えた形で記録すると共に、車載PC32に入力して、そのタイミングで、GPS装置で計測された累積距離情報及びGPS位置情報、ビデオ内表示時刻の取り込みを行い、時間パルスの累積個数も含めて同期ファイルが作成される。
【0022】
図4に時間・距離信号コントローラとGPS装置の処理フローを、図5には時間・距離信号コントローラと各機器とのタイミングチャートを示す。時間・距離信号コントローラでは、光学距離計からの信号を受け、車速判定器で時速300m以上の車速を検知すると各種データの取得を開始する。走行LEDが点灯し、地中レーダ装置は、光学距離計からの距離パルスを受けて、あらかじめ設定された通りに単位距離毎に一定数のデータ(例えば計測距離1m毎に20レーダ波形トレース)を取得する。時速300m未満では、走行LEDは消灯しHOLD状態となり、地中レーダ装置による計測が停止すると共に、車載PCによる同期ファイルの記録も停止する。この間、ビデオカメラ映像の記録は継続し、タイムコードジェネレータによる経過時間のビデオカメラ内へのスーパーインポーズも動作を継続する。なお、走行時には、GPS入力があれば距離累計値とGPS位置情報を出力し、GPS入力がなければ距離累計値のみを出力する。
【0023】
時間・距離信号コントローラからは一定時間間隔dtで時間パルスが発信される。発信された時間パルスは地中レーダデータに記録されると共に、時間パルス発信時における下記の情報が、同期ファイルとして車載PCに保存される。
(a)時間パルスの累積個数
(b)時間パルスが発信された時の累積距離
(c)時間パルスが発信された時のビデオカメラ映像に写し込まれたスーパーインポーズ時間
(d)時間パルスが発信された時のRTK−GPSによる位置情報
【0024】
このようにして、時間・距離信号コントローラからの時間パルスのタイミングで記録された同期ファイルを用いて、以下の手順で専用ソフトウエア上の処理を行い、レーダ波形トレース位置と、GPS座標、デジタルビデオファイル再生位置を対応づける。
【0025】
図6に、時間・距離信号コントローラからの時間パルス情報を含んだ地中レーダデータの概念図を示す。時間パルスの間隔が狭くなっている部分は車速が遅くなっている状態、時間パルスの間隔が広くなっている部分は車速が速くなっている状態、時間パルスが等間隔の部分は一定速度で走行している状態ということになる。地中レーダデータでは、計測開始からの累積レーダ波形トレース数と光学距離計による距離データは1対1で対応することから、時間パルス記録位置におけるレーダ波形トレース位置は、あらかじめ設定した単位距離毎のレーダ波形トレース数を用いることで求められる。時間・距離信号コントローラからの信号に基づき、システム同期用に記録される情報は以下の通りである。
Glat(k):GPS座標・緯度
Glon(k):GPS座標・経度
Galt(k):GPS座標・高度
D(k) :光学式距離センサの位置
TI(k) :ビデオカメラ映像内のスーパーインポーズ時間
【0026】
任意のレーダ波形トレース位置とGPS座標及びスーパーインポーズ時間との対応付けは、以下の手順で行う。
【0027】
(1)地中レーダデータより、レーダ波形トレース位置PT(k) を次の方法で求める。
(1−1)地中レーダデータ内の時間パルスの累積個数から求める。先頭からk+1個目にあるパルスのレーダ波形トレース位置PT(k) を、地中レーダデータの先頭から時間パルス数を累積する。
(1−2)時間パルス発信時の距離計位置D(k) から、
PT(k) =D(k) ・s
s:単位距離毎のレーダ波形トレース数
で求める。地中レーダデータへの時間パルス記録の欠損があった場合、上記(1−1)のみでは誤差が生じるため、2種類の異なる方法を採用することで測定の信頼性を高めることができる。
【0028】
(2)任意のレーダ波形トレース番号X∈PT(0)≦X≦PT(n-1)について、それぞれのレーダ波形トレース位置でのGPS位置情報[経度TGlat(X)、緯度TGlon(X)、高度TGalt(X)]と、スーパーインポーズ時間TTI(X) を、次式のようにしてパルス位置での値を用いて線形補間する。
区間k∈PT(k) ≦X≦PT(k+1)について、
TGlat(X)=A1・X+B1
A1=[Glat(k+1)−Glat(k)]/[PT(k+1)−PT(k-1)]
B1=[PT(k+1)・Glat(k)−PT(k)・Glat(k+1)]/[PT(k+1)−PT(k)]
TGlon(X)=A2・X+B2
A2=[Glon(k+1)−Glon(k)]/[PT(k+1)−PT(k-1)]
B2=[PT(k+1)・Glon(k)−PT(k)・Glon(k+1)]/[PT(k+1)−PT(k)]
TGalt(X)=A3・X+B3
A3=[Galt(k+1)−Galt(k)]/[PT(k+1)−PT(k-1)]
B3=[PT(k+1)・Galt(k)−PT(k)・Galt(k+1)]/[PT(k+1)−PT(k)]
TTI(X)=A4・X+B4
A4=[TI(k+1)−TI(k)]/[PT(k+1)−PT(k-1)]
B4=[PT(k+1)・TI(k)−PT(k)・TI(k+1)]/[PT(k+1)−PT(k)]
【0029】
レーダ波形トレース位置とデジタルビデオファイルとの対応付けは、以下の手順で任意のレーダ波形トレース位置でのデジタルビデオ再生位置を取得することにより行う。
(1)ビデオ再生開始位置でのスーパーインポーズ時刻TIsを、ビデオ画像から取得する。
(2)ビデオ再生終了位置でのスーパーインポーズ時刻TIeを、ビデオ画像から取得する。
(3)デジタルビデオファイルの再生時間長VLを取得する。
(4)任意のレーダ波形トレース位置Xでのビデオ内スーパーインポーズ時刻TI(X)から、次式を用いて対応するデジタルビデオ再生位置VT(X)を計算する。
VT(X)=(TI(X)−TIs)・a
但し、a=VL/(TIe−TIs)
この補正係数aは、ビデオ内スーパーインポーズ時刻が進む速度とビデオ再生速度が僅かに異なる場合があるため、同期精度を向上するために設定している。
【0030】
このように路面上を走行しながら探査する地中レーダ計測において、同期ファイルを作成し、時間パルスを組み込んだ地中レーダデータを用いることによって、計測した地中レーダデータとGPSによる位置情報及び取得位置のデジタルビデオ映像を正確にリンクさせ、路面下の空洞、埋設物、構造物などの地中構造について、任意の場所の情報を容易に取り出すことが可能となる。
【符号の説明】
【0031】
14 ビデオカメラ
16 GPS装置
18 カーナビ
20 光学距離計
22 アンテナ
30 時間・距離信号コントローラ
32 車載PC
34 タイムコードジェネレータ
36 マルチビューア
38 液晶ディスプレイ
42 地中レーダ装置
44 時刻発生器
【特許請求の範囲】
【請求項1】
地中レーダ装置、距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法であって、
基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用い、前記地中レーダ装置は、前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行って、前記時間パルスと共に地中レーダデータとして記録するように構成され、前記時間パルス毎に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成し、前記時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを対応付けるようにしたことを特徴とする車載型地中レーダ計測装置のシステム同期方法。
【請求項2】
時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置を、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
の両方から求める請求項1記載の車載型地中レーダ計測装置のシステム同期方法。
【請求項3】
任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間を、時間パルスのレーダ波形トレース位置を用いて線形補間により求める請求項2記載の車載型地中レーダ計測装置のシステム同期方法。
【請求項4】
ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を対応させる請求項3記載の車載型地中レーダ計測装置のシステム同期方法。
【請求項1】
地中レーダ装置、距離計、複数のデジタルビデオカメラ、デジタルビデオ映像に計測経過時間を写し込むタイムコードジェネレータ、及びGPS装置を装備し、走行しながら路面下を探査する車載型地中レーダ計測装置において、計測した地中レーダデータとGPSによる位置情報及びデジタルビデオ映像をリンクさせるシステム同期方法であって、
基準となる時間パルスと距離計に基づき距離パルスを発生する時間・距離信号コントローラを用い、前記地中レーダ装置は、前記距離パルスを受けて走行時に単位距離毎に一定数のレーダ波形収録を行って、前記時間パルスと共に地中レーダデータとして記録するように構成され、前記時間パルス毎に、(a)時間パルスの累積個数、(b)走行した累積距離、(c)タイムコードジェネレータのスーパーインポーズ時間、及び(d)GPS座標、を記録した同期ファイルを生成し、前記時間パルスを媒介として、地中レーダデータのレーダ波形トレース位置と、同期ファイルのGPS座標、スーパーインポーズ時間とを対応付けるようにしたことを特徴とする車載型地中レーダ計測装置のシステム同期方法。
【請求項2】
時間・距離信号コントローラから送られた任意の時間パルス発信時でのレーダ波形トレース位置を、
(1)地中レーダデータの時間パルスの累積個数
(2)同期ファイルに記録された時間パルス発信時の累積距離
の両方から求める請求項1記載の車載型地中レーダ計測装置のシステム同期方法。
【請求項3】
任意のレーダ波形トレース位置でのGPS座標とスーパーインポーズ時間を、時間パルスのレーダ波形トレース位置を用いて線形補間により求める請求項2記載の車載型地中レーダ計測装置のシステム同期方法。
【請求項4】
ビデオ再生実時間長をビデオ内スーパーインポーズ時間長で除した補正係数を用いて、任意のレーダ波形トレース位置でのビデオ再生位置を補正計算し、地中レーダデータの任意のレーダ波形トレース位置とデジタルビデオ映像を対応させる請求項3記載の車載型地中レーダ計測装置のシステム同期方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−137461(P2012−137461A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−291669(P2010−291669)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000121844)応用地質株式会社 (36)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000121844)応用地質株式会社 (36)
【Fターム(参考)】
[ Back to top ]