
車載型遠隔点検装置
【課題】点検診断の効率化が図られ、現地調査から診断カルテ作成までの時間短縮が可能で、点検車両の小型化により都市部での駐車が容易となり、車両の維持費も大幅に改善される。
【解決手段】車両本体、電子制御により先端側をX軸、Y軸、Z軸の3軸方向に変更可能に構成した多関節の可動ア−ム、電子制御用パソコンを備えた操作室、上下・左右に伸縮可能な側方監視用補助ア−ム、操作室内に設置された電子制御機器と、可動ア−ムの先端に搭載された構造物の検査画像を操作室内の点検・診断用モニタ−に送る構造物の撮影用機器、可動ア−ム及び補助ア−ムに搭載された監視カメラ、可動ア−ム及び構造物撮影用機器の動作を操作室内から確認可能な三面図または3次元CGソフトを搭載した。
【解決手段】車両本体、電子制御により先端側をX軸、Y軸、Z軸の3軸方向に変更可能に構成した多関節の可動ア−ム、電子制御用パソコンを備えた操作室、上下・左右に伸縮可能な側方監視用補助ア−ム、操作室内に設置された電子制御機器と、可動ア−ムの先端に搭載された構造物の検査画像を操作室内の点検・診断用モニタ−に送る構造物の撮影用機器、可動ア−ム及び補助ア−ムに搭載された監視カメラ、可動ア−ム及び構造物撮影用機器の動作を操作室内から確認可能な三面図または3次元CGソフトを搭載した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、構造物の点検及び診断業務を目的とし、コンピュ−タ制御技術で手動または半自動で自在に動作するア−ムと先端部にカメラを有する車載型遠隔点検装置に関するものである。
【背景技術】
【0002】
従来使用されている橋梁点検車輌等は大型トラックに油圧ア−ムを搭載し、人が乗ることが出来る高所作業車と空中作業車がある。高所作業車は車体より高い位置にア−ムを延長することが可能で、空中作業車は点検車より低い位置の調査に適した構造である。また、橋梁点検車両等のア−ムには人が乗らずにア−ム先端部にカメラを取り付け遠隔操作で使用する型式がある。さらに、前記橋梁点検車等が使用できない箇所については足場工を設置するなどの方法により、肉眼での近接目視検査や離れた位置からの双眼鏡による遠望目視検査があり適用されている。
【0003】
しかし、従来型の橋梁点検車輌等や足場工の設置はコストや安全上の問題があり、また点検車輌は大型であるため、幅員の狭い駐車スペ−ス等の問題や車輌の維持管理コストを要し、点検画像や野帳を使用し、事務所に戻ってからの整理となるため、再調査が必要となることがあり、多くの時間を要した。さらにまた、現場調査時の不明箇所への対応も電話等による音声のみの伝達形態となることが多く、非効率なものとなっていた。また、伸縮自在ア−ムの操作においても周辺構造物との位置関係の把握や衝突防止のため、手動操作が基本となっており予想以上の時間と人手を要した。
【0004】
この改善策として、伸縮ア−ムの小型化、軽量化が検討されているが、現状では機器の組み立てや移動に運搬用のトラック等を要し、時間的な問題は解決するに至っていない、機器の操作においてはモニタ−カメラを併用した操作となっているが、撮影位置を定量的に把握できるシステムとはなっていないため、桁下でのア−ム移動操作及び点検位置の確認は非効率となっている。また、現地調査デ−タの整理は事務所に戻ってからとなるため、診断結果を得るまでの時間短縮とはなっていない。さらに、ア−ムの移動による衝突などの問題も懸念されている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、従来型の橋梁点検車輌等や足場工の設置では、コストや安全上の問題がある。また、従来型の点検車輌等は大型であるため、駐車スペ−ス等の問題や車両の維持管理コストを要し、現地調査ではカメラによる点検画像撮影や野帳を使用し、事務所に戻ってからの整理となるため、点検箇所の位置情報が不十分で再調査が必要となることがあり、多くの時間を要した。
【課題を解決するための手段】
【0006】
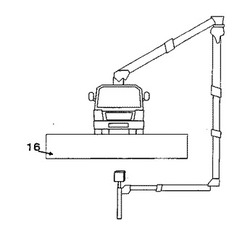
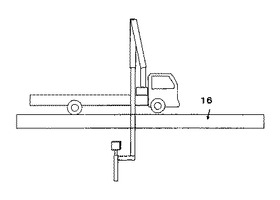
前記車載型遠隔点検装置の可動ア−ムを図1、図2、図3に示すように油圧(電動)で伸縮・回転可能かつ折り畳み可能に構成してあることにより、小型収納を可能とし、トラック等で容易に収納可能な構造としたことである。
【0007】
前記車載型遠隔点検装置の前記可動ア−ムの先端位置に衝突回避用センサ−を備え点検・診断対象物への衝突を段階的に回避することである。
【0008】
前記車載型遠隔点検装置の前記可動ア−ムの動作を前記電子制御により学習することで2回目以降の動作を半自動化することである。
【0009】
前記車載型遠隔点検装置の前記補助ア−ムと前記監視カメラにより可動ア−ムの操作性が向上することである。
【0010】
前記車載型遠隔点検装置の前記橋面距離センサ−により橋梁と可動ア−ム及び構造物撮影用機器との位置関係が明確になり操作性が向上することである。
【0011】
前記車載型遠隔点検装置の車両本体は、前記可動ア−ムの先端側に搭載した前記構造物撮影用機器の位置を該車両内モニタ−画面上及びCG上で確認しながら手元レバ−を操作し、前記可動ア−ムを手動または半自動で伸縮または回転し、目的の位置まで移動するための手段を備えていることである。
【発明の効果】
【0012】
従来の大型トラック等を用いた橋梁点検車および診断方法に比べ点検診断の効率化が図られ、現地調査から診断カルテ作成までの時間短縮が可能で、点検車両の小型化により都市部での駐車が容易となり、車両の維持費も大幅に改善された。
遠隔操作可能な伸縮ア−ムは多関節で自由度が高く大きな作業半径を有するため、危険物の調査や探査装置を油圧ア−ム先端部に取り付けることで人が直接行くことが出来ない危険箇所への調査も可能となる。コンクリ−ト部材の劣化診断にも適用可能である。
【発明を実施するための最良の形態】
【0013】
1は車両本体で、該車両本体はバントラック、トラック等の自動車、鉄道車両のような軌道車である。
【0014】
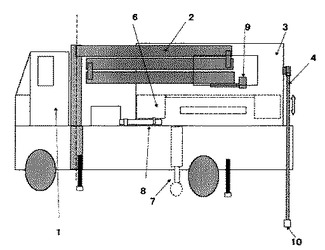
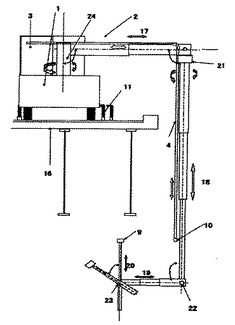
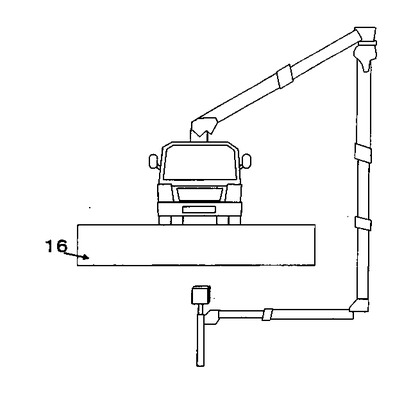
2は前記車両本体1に搭載した可動ア−ムを示す。該可動ア−ム2は駆動力と遠隔電子制御により先端側をX軸、Y軸、Z軸の3軸方向に偏向可能に構成し、該車両本体に旋回可能に搭載した該可動ア−ム2と、前記車両から該可動ア−ム2を操作するア−ム遠隔操作手段とから構成してある。そして、油圧(電動)により、該可動ア−ム2の17,18,19,20において該可動ア−ム2の軸方向に伸縮し、該可動ア−ム2の17を支持する該車両本体に組み込まれている旋回台24は水平方向の回転と鉛直方向に作動する。また、同様に該可動ア−ム2の17と18の結合部21も水平方向の回転と鉛直方向に作動する。さらにまた、該可動ア−ム2の18と19の結合部22及び19と20の結合部23は鉛直方向に作動する。
【0015】
3は前記車両本体に搭載され、前記可動ア−ム及び前記構造物の撮影装置の遠隔制御に必要となる電子制御用パソコンを備え、また前記補助ア−ム操作機構及び点検診断用パソコンを備えた部屋構造により構成されている。
【0016】
4は前記車両本体に搭載され、折りたたみ可能な機構を有し、水平及び鉛直方向のア−ムは遠隔または手動で伸縮可能な構造で、補助ア−ムの先端部には前記可動ア−ムの側面部の撮影が可能な監視カメラが装備されている。
【0017】
5は前記可動ア−ム制御用及び前記構造物の撮影装置制御、点検・診断用静止画像確認、監視カメラ表示、ビデオ画像表示記録、前記CG表示を目的としたパソコンから構成されている。
【0018】
6は前記点検装置の遠隔制御用電源及び制御用基板から構成されている。
【0019】
7は構造物内の前記車両の進行方向の距離を測定し、操作室内へ伝達可能な構造を有している装置である。
【0020】
8は構造物と前記点検装置の車両進行方向と交差する距離を測定し、操作室内へ伝達可能な構造を有している装置である。
【0021】
9は前記可動ア−ム2の先端に搭載したカメラ、衝突防止センサ−、照明、距離計、制御基板により構成され、前記操作室内部より、遠隔操作方式で操作可能な構造である。
【0022】
10は前記可動ア−ムの各関節ごと及び補助ア−ム先端部に搭載され遠隔で画像を送受信する構造を備えている。
【0023】
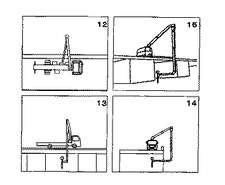
12は前記点検装置の平面図上の動きを監視できる構造である。
【0024】
13は前記点検装置の側面図上の動きを監視できる構造である。
【0025】
14は前記点検装置の断面図上の動きを監視できる構造である。
【0026】
15は前記点検装置の透視図上の動きを監視できる構造である。
【0027】
請求項10の可視化表示手段は,該車両位置の情報,前記可動アーム2の各部に設置した各種センサによる位置姿勢情報,予め準備された構造物のCADデータから,前記車両本体1,前記可動アーム2と構造物の位置関係を三面図または3次元CGにより作業者へ呈示する。
【0028】
前記車載型遠隔点検装置は、橋梁の上面より橋桁や床版の下面部の点検診断に活用できる外、点検ア−ム鉛直上方に延長することが可能で、さらに橋梁下面位置に該車載型遠隔点検装置が進入可能な場合には橋下からの適用も可能である。また、トンネル頂版部、ダムの斜め下の提体部、擁壁部、JR等の鉄道橋及び建築構造物の維持管理点検診断にも使用可能である。
【図面の簡単な説明】
【0029】
【図1】車載型遠隔点検装置の側面概観図。
【図2】車載型遠隔点検装置の平面概観図。
【図3】車載型遠隔点検装置の断面概観図。
【図4】三面図及び3次元CGイメ−ジ図。
【図5】可動ア−ムの点検動作平面CG概観図。
【図6】可動ア−ムの点検動作側面CG概観図。
【図7】可動ア−ムの点検動作断面CG概観図。
【符号の説明】
【0030】
1 車載型遠隔点検装置の車体(バントラック、トラック)
2 可動ア−ム
3 操作室
4 補助ア−ム
5 パソコン
6 制御機器
7 橋軸方向の距離計
8 橋軸直角方向の距離計
9 構造物の撮影用機器
10 監視カメラ
11 アウトリガ−
12 パソコンモニタ−平面CG
13 パソコンモニタ−側面CG
14 パソコンモニタ−断面CG
15 パソコン透視図
16 構造物(橋、擁壁、トンネル、ダム、水路他)
17 第1ア−ム伸縮
18 第2ア−ム伸縮
19 第3ア−ム伸縮
20 第4ア−ム伸縮
21 第1ア−ムと第2ア−ムの結合部
22 第2ア−ムと第3ア−ムの結合部
23 第3ア−ムと第4ア−ムの結合部
24 第1ア−ムの水平旋回部
【技術分野】
【0001】
本発明は、構造物の点検及び診断業務を目的とし、コンピュ−タ制御技術で手動または半自動で自在に動作するア−ムと先端部にカメラを有する車載型遠隔点検装置に関するものである。
【背景技術】
【0002】
従来使用されている橋梁点検車輌等は大型トラックに油圧ア−ムを搭載し、人が乗ることが出来る高所作業車と空中作業車がある。高所作業車は車体より高い位置にア−ムを延長することが可能で、空中作業車は点検車より低い位置の調査に適した構造である。また、橋梁点検車両等のア−ムには人が乗らずにア−ム先端部にカメラを取り付け遠隔操作で使用する型式がある。さらに、前記橋梁点検車等が使用できない箇所については足場工を設置するなどの方法により、肉眼での近接目視検査や離れた位置からの双眼鏡による遠望目視検査があり適用されている。
【0003】
しかし、従来型の橋梁点検車輌等や足場工の設置はコストや安全上の問題があり、また点検車輌は大型であるため、幅員の狭い駐車スペ−ス等の問題や車輌の維持管理コストを要し、点検画像や野帳を使用し、事務所に戻ってからの整理となるため、再調査が必要となることがあり、多くの時間を要した。さらにまた、現場調査時の不明箇所への対応も電話等による音声のみの伝達形態となることが多く、非効率なものとなっていた。また、伸縮自在ア−ムの操作においても周辺構造物との位置関係の把握や衝突防止のため、手動操作が基本となっており予想以上の時間と人手を要した。
【0004】
この改善策として、伸縮ア−ムの小型化、軽量化が検討されているが、現状では機器の組み立てや移動に運搬用のトラック等を要し、時間的な問題は解決するに至っていない、機器の操作においてはモニタ−カメラを併用した操作となっているが、撮影位置を定量的に把握できるシステムとはなっていないため、桁下でのア−ム移動操作及び点検位置の確認は非効率となっている。また、現地調査デ−タの整理は事務所に戻ってからとなるため、診断結果を得るまでの時間短縮とはなっていない。さらに、ア−ムの移動による衝突などの問題も懸念されている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
解決しようとする問題点は、従来型の橋梁点検車輌等や足場工の設置では、コストや安全上の問題がある。また、従来型の点検車輌等は大型であるため、駐車スペ−ス等の問題や車両の維持管理コストを要し、現地調査ではカメラによる点検画像撮影や野帳を使用し、事務所に戻ってからの整理となるため、点検箇所の位置情報が不十分で再調査が必要となることがあり、多くの時間を要した。
【課題を解決するための手段】
【0006】
前記車載型遠隔点検装置の可動ア−ムを図1、図2、図3に示すように油圧(電動)で伸縮・回転可能かつ折り畳み可能に構成してあることにより、小型収納を可能とし、トラック等で容易に収納可能な構造としたことである。
【0007】
前記車載型遠隔点検装置の前記可動ア−ムの先端位置に衝突回避用センサ−を備え点検・診断対象物への衝突を段階的に回避することである。
【0008】
前記車載型遠隔点検装置の前記可動ア−ムの動作を前記電子制御により学習することで2回目以降の動作を半自動化することである。
【0009】
前記車載型遠隔点検装置の前記補助ア−ムと前記監視カメラにより可動ア−ムの操作性が向上することである。
【0010】
前記車載型遠隔点検装置の前記橋面距離センサ−により橋梁と可動ア−ム及び構造物撮影用機器との位置関係が明確になり操作性が向上することである。
【0011】
前記車載型遠隔点検装置の車両本体は、前記可動ア−ムの先端側に搭載した前記構造物撮影用機器の位置を該車両内モニタ−画面上及びCG上で確認しながら手元レバ−を操作し、前記可動ア−ムを手動または半自動で伸縮または回転し、目的の位置まで移動するための手段を備えていることである。
【発明の効果】
【0012】
従来の大型トラック等を用いた橋梁点検車および診断方法に比べ点検診断の効率化が図られ、現地調査から診断カルテ作成までの時間短縮が可能で、点検車両の小型化により都市部での駐車が容易となり、車両の維持費も大幅に改善された。
遠隔操作可能な伸縮ア−ムは多関節で自由度が高く大きな作業半径を有するため、危険物の調査や探査装置を油圧ア−ム先端部に取り付けることで人が直接行くことが出来ない危険箇所への調査も可能となる。コンクリ−ト部材の劣化診断にも適用可能である。
【発明を実施するための最良の形態】
【0013】
1は車両本体で、該車両本体はバントラック、トラック等の自動車、鉄道車両のような軌道車である。
【0014】
2は前記車両本体1に搭載した可動ア−ムを示す。該可動ア−ム2は駆動力と遠隔電子制御により先端側をX軸、Y軸、Z軸の3軸方向に偏向可能に構成し、該車両本体に旋回可能に搭載した該可動ア−ム2と、前記車両から該可動ア−ム2を操作するア−ム遠隔操作手段とから構成してある。そして、油圧(電動)により、該可動ア−ム2の17,18,19,20において該可動ア−ム2の軸方向に伸縮し、該可動ア−ム2の17を支持する該車両本体に組み込まれている旋回台24は水平方向の回転と鉛直方向に作動する。また、同様に該可動ア−ム2の17と18の結合部21も水平方向の回転と鉛直方向に作動する。さらにまた、該可動ア−ム2の18と19の結合部22及び19と20の結合部23は鉛直方向に作動する。
【0015】
3は前記車両本体に搭載され、前記可動ア−ム及び前記構造物の撮影装置の遠隔制御に必要となる電子制御用パソコンを備え、また前記補助ア−ム操作機構及び点検診断用パソコンを備えた部屋構造により構成されている。
【0016】
4は前記車両本体に搭載され、折りたたみ可能な機構を有し、水平及び鉛直方向のア−ムは遠隔または手動で伸縮可能な構造で、補助ア−ムの先端部には前記可動ア−ムの側面部の撮影が可能な監視カメラが装備されている。
【0017】
5は前記可動ア−ム制御用及び前記構造物の撮影装置制御、点検・診断用静止画像確認、監視カメラ表示、ビデオ画像表示記録、前記CG表示を目的としたパソコンから構成されている。
【0018】
6は前記点検装置の遠隔制御用電源及び制御用基板から構成されている。
【0019】
7は構造物内の前記車両の進行方向の距離を測定し、操作室内へ伝達可能な構造を有している装置である。
【0020】
8は構造物と前記点検装置の車両進行方向と交差する距離を測定し、操作室内へ伝達可能な構造を有している装置である。
【0021】
9は前記可動ア−ム2の先端に搭載したカメラ、衝突防止センサ−、照明、距離計、制御基板により構成され、前記操作室内部より、遠隔操作方式で操作可能な構造である。
【0022】
10は前記可動ア−ムの各関節ごと及び補助ア−ム先端部に搭載され遠隔で画像を送受信する構造を備えている。
【0023】
12は前記点検装置の平面図上の動きを監視できる構造である。
【0024】
13は前記点検装置の側面図上の動きを監視できる構造である。
【0025】
14は前記点検装置の断面図上の動きを監視できる構造である。
【0026】
15は前記点検装置の透視図上の動きを監視できる構造である。
【0027】
請求項10の可視化表示手段は,該車両位置の情報,前記可動アーム2の各部に設置した各種センサによる位置姿勢情報,予め準備された構造物のCADデータから,前記車両本体1,前記可動アーム2と構造物の位置関係を三面図または3次元CGにより作業者へ呈示する。
【0028】
前記車載型遠隔点検装置は、橋梁の上面より橋桁や床版の下面部の点検診断に活用できる外、点検ア−ム鉛直上方に延長することが可能で、さらに橋梁下面位置に該車載型遠隔点検装置が進入可能な場合には橋下からの適用も可能である。また、トンネル頂版部、ダムの斜め下の提体部、擁壁部、JR等の鉄道橋及び建築構造物の維持管理点検診断にも使用可能である。
【図面の簡単な説明】
【0029】
【図1】車載型遠隔点検装置の側面概観図。
【図2】車載型遠隔点検装置の平面概観図。
【図3】車載型遠隔点検装置の断面概観図。
【図4】三面図及び3次元CGイメ−ジ図。
【図5】可動ア−ムの点検動作平面CG概観図。
【図6】可動ア−ムの点検動作側面CG概観図。
【図7】可動ア−ムの点検動作断面CG概観図。
【符号の説明】
【0030】
1 車載型遠隔点検装置の車体(バントラック、トラック)
2 可動ア−ム
3 操作室
4 補助ア−ム
5 パソコン
6 制御機器
7 橋軸方向の距離計
8 橋軸直角方向の距離計
9 構造物の撮影用機器
10 監視カメラ
11 アウトリガ−
12 パソコンモニタ−平面CG
13 パソコンモニタ−側面CG
14 パソコンモニタ−断面CG
15 パソコン透視図
16 構造物(橋、擁壁、トンネル、ダム、水路他)
17 第1ア−ム伸縮
18 第2ア−ム伸縮
19 第3ア−ム伸縮
20 第4ア−ム伸縮
21 第1ア−ムと第2ア−ムの結合部
22 第2ア−ムと第3ア−ムの結合部
23 第3ア−ムと第4ア−ムの結合部
24 第1ア−ムの水平旋回部
【特許請求の範囲】
【請求項1】
車両本体と、駆動力を電子制御により先端側をX軸、Y軸、Z軸の3軸方向に変更可能に構成し、該車両本体に旋回可能に搭載した可動ア−ムと、前記車両本体に搭載され、制御に必要となる電子制御用パソコンを備えた操作室と、前記車両本体に搭載された上下・左右に伸縮可能な側方監視用補助ア−ムと、前記操作室内に設置された電子制御機器と、前記可動ア−ムの先端に搭載された構造物の検査画像を操作室内の点検・診断用モニタ−に送る構造物の撮影用機器と、前記可動ア−ム及び補助ア−ムに搭載された監視カメラと、前記可動ア−ム及び構造物撮影用機器を操作室内から三面図または3次元CG、監視撮影装置により操作可能な遠隔操作手段と、前記構造物撮影用機器を操作室内から操作可能な遠隔操作手段と、から構成してなる車載型遠隔点検装置。
【請求項2】
前記可動ア−ムは、遠隔通信による電子制御で手動または半自動で伸縮可能かつ折り畳み可能に構成してあることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項3】
前記補助ア−ムは、伸縮可能なア−ムで、前記可動ア−ム動作を前記車両側方から監視可能に水平及び鉛直方向に伸縮構造を有することを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項4】
前記電子制御機器は可動ア−ムの伸縮・回転動作を可変速形にするプログラムソフトにより操作卓の動作を電子的に油量の変化に置き換えることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項5】
前記点検装置は構造物と車両の位置を関連付け可能な車両位置計測手段を備えていることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項6】
前記構造物撮影用機器は雲台に構造物撮影用カメラ、ビデオ、距離計側手段、衝突防止センサ−、通信用機器を装備し、操作室側パソコンとの通信機能により遠隔で撮影が可能であることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項7】
前記可動ア−ムは前記点検装置に取り付けた伸縮・回転のセンサ−情報を基に伸縮回転動作を前記操作室内の制御機器で遠隔操作可能であることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項8】
前記可動ア−ムは、雲台に衝突回避用センサ−を備えかつ段階的な警告及び停止装置を有することを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項9】
前記点検装置は、前記可動ア−ムの先端側に搭載した前記構造物撮影用機器内の距離計と各ア−ムの位置情報により、構造物の被検査部の位置情報を記録保存する手段を備えていることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項10】
前記点検装置は、前記構造物と、前記車両本体、前記可動アームの現在の位置関係を三面図または3次元CGにより操作者へ呈示する可視化表示手段を備えている事を特徴とする請求項1記載の車載型遠隔点検装置。
【請求項1】
車両本体と、駆動力を電子制御により先端側をX軸、Y軸、Z軸の3軸方向に変更可能に構成し、該車両本体に旋回可能に搭載した可動ア−ムと、前記車両本体に搭載され、制御に必要となる電子制御用パソコンを備えた操作室と、前記車両本体に搭載された上下・左右に伸縮可能な側方監視用補助ア−ムと、前記操作室内に設置された電子制御機器と、前記可動ア−ムの先端に搭載された構造物の検査画像を操作室内の点検・診断用モニタ−に送る構造物の撮影用機器と、前記可動ア−ム及び補助ア−ムに搭載された監視カメラと、前記可動ア−ム及び構造物撮影用機器を操作室内から三面図または3次元CG、監視撮影装置により操作可能な遠隔操作手段と、前記構造物撮影用機器を操作室内から操作可能な遠隔操作手段と、から構成してなる車載型遠隔点検装置。
【請求項2】
前記可動ア−ムは、遠隔通信による電子制御で手動または半自動で伸縮可能かつ折り畳み可能に構成してあることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項3】
前記補助ア−ムは、伸縮可能なア−ムで、前記可動ア−ム動作を前記車両側方から監視可能に水平及び鉛直方向に伸縮構造を有することを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項4】
前記電子制御機器は可動ア−ムの伸縮・回転動作を可変速形にするプログラムソフトにより操作卓の動作を電子的に油量の変化に置き換えることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項5】
前記点検装置は構造物と車両の位置を関連付け可能な車両位置計測手段を備えていることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項6】
前記構造物撮影用機器は雲台に構造物撮影用カメラ、ビデオ、距離計側手段、衝突防止センサ−、通信用機器を装備し、操作室側パソコンとの通信機能により遠隔で撮影が可能であることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項7】
前記可動ア−ムは前記点検装置に取り付けた伸縮・回転のセンサ−情報を基に伸縮回転動作を前記操作室内の制御機器で遠隔操作可能であることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項8】
前記可動ア−ムは、雲台に衝突回避用センサ−を備えかつ段階的な警告及び停止装置を有することを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項9】
前記点検装置は、前記可動ア−ムの先端側に搭載した前記構造物撮影用機器内の距離計と各ア−ムの位置情報により、構造物の被検査部の位置情報を記録保存する手段を備えていることを特徴とする請求項1記載の車載型遠隔点検装置。
【請求項10】
前記点検装置は、前記構造物と、前記車両本体、前記可動アームの現在の位置関係を三面図または3次元CGにより操作者へ呈示する可視化表示手段を備えている事を特徴とする請求項1記載の車載型遠隔点検装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−20426(P2008−20426A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2006−217533(P2006−217533)
【出願日】平成18年7月11日(2006.7.11)
【出願人】(301078113)株式会社 帝国設計事務所 (2)
【出願人】(591190955)北海道 (121)
【出願人】(391033115)株式会社カナモト (4)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成18年7月11日(2006.7.11)
【出願人】(301078113)株式会社 帝国設計事務所 (2)
【出願人】(591190955)北海道 (121)
【出願人】(391033115)株式会社カナモト (4)
【Fターム(参考)】
[ Back to top ]