
車載情報処理装置
【課題】様々な仕様のセンサ出力を利用して情報を取得する場合であっても特別なパルス整合器を接続することなく正しい情報を取得することが可能な車載情報処理装置を提供する。
【解決手段】車両側からの車速パルス信号SG11,SG21を入力する信号入力端子と、前記信号入力端子の信号に基づいて車両の情報を取得すると共に取得した情報の記録処理又は表示処理を行う情報処理部32と、前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部40と、前記変換情報保持部が保持している変換情報に従って前記信号入力端子に入力された信号を変換処理して前記情報処理部が必要とする情報を生成する信号変換処理部31とを備える。
【解決手段】車両側からの車速パルス信号SG11,SG21を入力する信号入力端子と、前記信号入力端子の信号に基づいて車両の情報を取得すると共に取得した情報の記録処理又は表示処理を行う情報処理部32と、前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部40と、前記変換情報保持部が保持している変換情報に従って前記信号入力端子に入力された信号を変換処理して前記情報処理部が必要とする情報を生成する信号変換処理部31とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、入力した車速パルス等の信号に基づいて車両の情報を取得しこの情報を処理する車載情報処理装置に関する。
【背景技術】
【0002】
従来より、乗用車や業務用の各種車両には車速等の車両の情報を必要とする様々な車載器が搭載されている。例えば、業務用のトラック等の車両には、運行状態を表す車速等の情報を定期的に取得して自動的に記録するデジタルタコグラフや、事故などの際にカメラで撮影した画像や車速などの情報を記録するドライブレコーダが搭載されている。また、車速等の情報を取得してリアルタイムで表示する計器板ユニットも全ての車両に搭載されている。
【0003】
ところで、一般的な車両においては、車速の情報を得るために変速機の出力軸に車速センサが搭載されている。この車速センサは、変速機の出力軸が所定量回動する毎に1つのパルス信号を出力する。従って、車速センサから出力されるパルス信号(すなわち車速パルス)のパルス周期に基づいて現在の車速を把握することができる。
【0004】
また、4輪自動車のスピードメータの指示に関しては、JIS規格において、車速が60km/hの時に、車速センサの駆動回転速度が637rpmになるように規定されている。また、駆動軸1回転あたりの車速センサ発生パルス数が4、8、16、20、25のいずれかの値になるように規定されている。
【0005】
つまり、駆動軸1回転あたりの車速センサ発生パルス数は、それぞれの車両の仕様に応じて異なる可能性がある。例えば、このパルス数が4の車両とパルス数が8の車両とでは、同じ速度で走行している時であっても、車速パルスの周期が大きく異なる。また、例えば車両のタイヤのサイズ等が変化すると、車速パルスの周期と実際の車速との関係に変化が生じる。
【0006】
一方、一般的なデジタルタコグラフやドライブレコーダ等の車載器側は、車両側から入力される車速パルスの周期と車速との関係が一定であることを想定して設計されている。従って、仕様が合わない車両に車載器を搭載しようとする場合には、車載器が想定している車速パルスの周期と車速との関係と、実際の車速パルスの仕様とが一致しなくなり、正しい車速を認識できない。
【0007】
そこで、仕様が合わない車両に対してデジタルタコグラフやドライブレコーダ等の車載器を搭載しようとする場合には、車両側の車速センサの出力端子と車載器の入力端子との間に、パルス整合器と呼ばれる装置を介在し、車載器が必要とする特性の車速パルスを生成するように接続していた。
【0008】
パルス整合器は、車速センサから入力される車速パルスから、パルス数や周期の特性が異なる車速パルスを生成する装置である。パルス整合器に関する従来技術は、例えば特許文献1に開示されている。
【0009】
また、特許文献2に開示されているような車速パルス信号発生装置が用いられる場合もある。車速パルス信号発生装置は、他の装置から取得した車速の情報に基づいて特定の車載器が必要とする車速パルス信号を生成することができる。
【0010】
また、車速センサ等のパルス数と電位レベルとを多岐にわたり変換して複数の出力を得る車速信号の信号変換装置が特許文献3に開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2006−78266号公報
【特許文献2】特開2008−190935号公報
【特許文献3】特開平8−320328号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、車速センサ等の出力とデジタルタコグラフ、ドライブレコーダ等の車載器の入力との間に上記のパルス整合器を接続する場合には、パルス整合器のために特別な設置スペースを確保しなければならないし、配線が増えて設置作業の負担も増える。
【0013】
また、取り付けの際には、車速センサ側の仕様と車載器側の仕様とを事前に調べて、両者を整合させるのに必要な機能を備えている特定のパルス整合器を選別しなければならない。特に、車速センサ等のセンサ側の仕様については、パルス数の他にも信号波形の違いや、センサ出力回路の構成の違いを考慮しなければならず、条件に適合するパルス整合器を特定する作業は容易ではない。
【0014】
また、パルス整合器を接続して車速センサ側の仕様と車載器側の仕様とを整合させた場合であっても、例えば車両に装着するタイヤのサイズを変更したような場合には、車載器側が認識する車速が実際の車速と微妙にずれて誤差が生じる可能性もある。
【0015】
また、車両の車速センサの出力にデジタルタコグラフ、ドライブレコーダ等の複数台の車載器を並列に接続する場合には、車速センサの負荷が過大になり、車速センサから出力される車速パルスの波形が乱れたり車速パルスの電位が異常になり誤動作が生じる可能性もある。
【0016】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、様々な仕様のセンサ出力を利用して情報を取得する場合であっても、特別なパルス整合器を接続することなく正しい情報を取得することが可能な車載情報処理装置を提供することにある。
【課題を解決するための手段】
【0017】
前述した目的を達成するために、本発明に係る車載情報処理装置は、下記(1)〜(5)を特徴としている。
(1) 少なくとも車両側から出力される車速パルス信号を入力する信号入力端子と、
前記信号入力端子に入力される信号に基づいて車両の情報を取得すると共に、取得した情報に関する記録処理および表示処理の少なくとも一方を行う情報処理部と、
少なくとも前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部と、
前記変換情報保持部が保持している変換情報に従って、前記信号入力端子に入力された信号を変換処理して、前記情報処理部が必要とする情報を生成する信号変換処理部と
を備えること。
(2) 上記(1)に記載の車載情報処理装置であって、
1つもしくは複数の信号出力端子を更に備え、
前記信号変換処理部は、前記信号入力端子に入力された第1の信号を変換処理して、変換処理後の第2の信号を生成し、前記第2の信号を前記信号出力端子から出力する出力信号生成部を備えること。
(3) 上記(1)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、少なくとも前記信号入力端子に入力される第1の信号と前記情報処理部が扱う第2の信号とのパルス数の比率に相当する情報を保持すること。
(4) 上記(3)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号の波形を表す情報を更に保持すること。
(5) 上記(3)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号を出力する回路の形式の違いを表す情報を更に保持すること。
【0018】
上記(1)の構成の車載情報処理装置によれば、前記変換情報保持部が保持する変換情報の内容を適切に書き換えるだけで、パルス整合器を接続しなくても様々な条件のセンサ出力に対応できる。
上記(2)の構成の車載情報処理装置によれば、本装置の出力側に、例えばドライブレコーダなど他の車載器を接続することが可能になる。これにより、車両側のセンサ出力に複数の車載器を並列に接続する必要がなくなり、信号波形の乱れや信号電位が異常になるのを避けることができる。
上記(3)の構成の車載情報処理装置によれば、本装置が想定している信号と接続された車両側のセンサとのパルス数に関する特性の違いを、パルス整合器を接続することなく整合させることができる。
上記(4)の構成の車載情報処理装置によれば、本装置が想定している信号と接続された車両側のセンサとの信号波形に関する特性の違いを、パルス整合器を接続することなく整合させることができる。
上記(5)の構成の車載情報処理装置によれば、接続された車両側のセンサの出力回路に関する形式の違いに対して、パルス整合器を接続することなく対応することができる。
【発明の効果】
【0019】
本発明によれば、様々な仕様のセンサ出力を利用して情報を取得する場合であっても、特別なパルス整合器を接続することなく正しい情報を取得することが可能になる。従って、装置全体のコストを低減することができ、車載器を設置する作業も簡単になり、パルス整合器を設置するための空間を確保する必要もなくなる。
【0020】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0021】
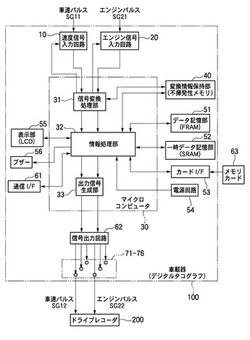
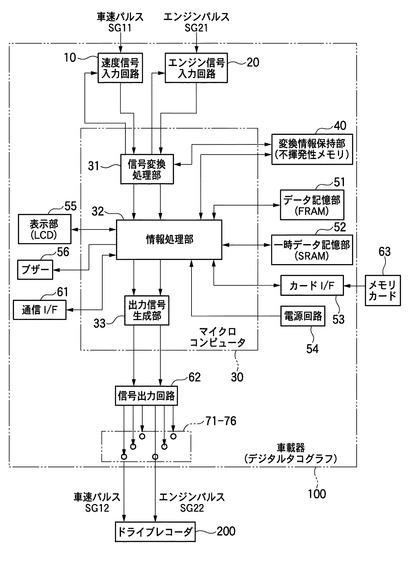
【図1】図1は、実施形態の車載情報処理装置の構成例を示すブロック図である。
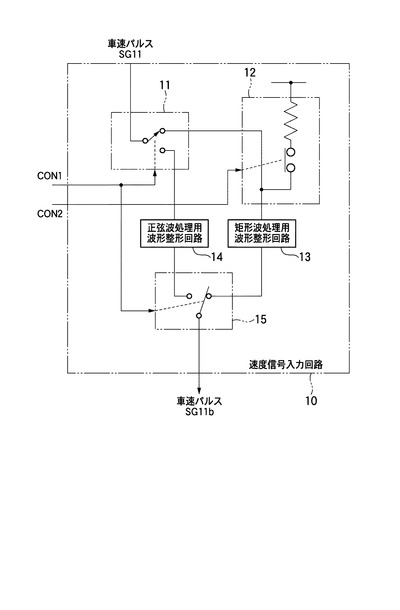
【図2】図2は、図1に示した速度信号入力回路の構成例を示すブロック図である。
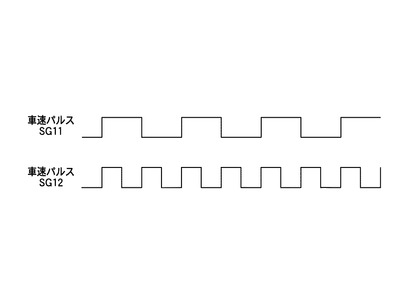
【図3】図3は、入力される車速パルスと変換後の車速パルスの具体例を示す波形図である。
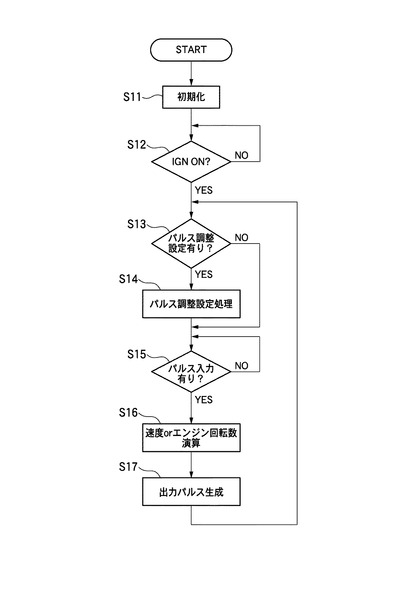
【図4】図4は、図1に示した装置の主要な動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
本発明の車載情報処理装置に関する具体的な実施の形態について、各図を参照しながら以下に説明する。
【0023】
<装置全体の構成>
本実施形態における車載情報処理装置の構成例が図1に示されている。図1に示す車載器100は、車両に搭載されるデジタルタコグラフとして構成されている。この車載器100が本発明の車載情報処理装置に相当する。勿論、デジタルタコグラフ以外の車載器に本発明を適用することも可能である。
【0024】
図1に示す車載器100は、これを搭載した車両の運行中に、実際の車速やエンジン回転速度に関する情報を自動的に収集し、そのデータをメモリカード63に記録することができる。勿論、現実的なデジタルタコグラフにおいては、車速やエンジン回転速度以外にも様々な情報を収集して記録できるが、図1の例ではそれらの記載を省略してある。
【0025】
図1に示すように、この車載器100は、速度信号入力回路10、エンジン信号入力回路20、マイクロコンピュータ30、変換情報保持部40、データ記憶部51、一時データ記憶部52、カードインタフェース(I/F)53、電源回路54、表示部55、ブザー56、通信インタフェース61、信号出力回路62、および信号出力端子71〜76を備えている。
【0026】
速度信号入力回路10は、車両側に搭載されている車速センサから出力される車速パルス信号SG11を入力し、マイクロコンピュータ30が処理可能な信号に変換する。車速センサは、一般的に車両の変速機に組み込まれており、変速機の出力軸が所定量回動する毎にパルスを出力するように構成される。後述するように、速度信号入力回路10は様々な形式の車速パルス信号SG11に対応可能に構成されている。
【0027】
エンジン信号入力回路20は、車両側に搭載されているエンジン回転センサから出力されるエンジンパルス信号SG21を入力し、マイクロコンピュータ30が処理可能な信号に変換する。エンジン回転センサは、エンジンの出力軸の回動を検出し、この出力軸が所定量回動する毎にパルスを出力するように構成される。
【0028】
マイクロコンピュータ30は、予め組み込まれているプログラムを実行することにより、デジタルタコグラフの制御に必要な各種の機能を実現する。本実施形態では、マイクロコンピュータ30の代表的な機能として、信号変換処理部31、情報処理部32、及び出力信号生成部33が備わっている。
【0029】
情報処理部32は、入力される車速パルス信号SG11やエンジンパルス信号SG21などにより得られる車両の運行情報を定期的に収集し、得られたデータをメモリカード63上に自動的に記録する。
【0030】
信号変換処理部31は、速度信号入力回路10、エンジン信号入力回路20を介して入力される車速パルス信号SG11及びエンジンパルス信号SG21のそれぞれについて、変換情報保持部40に保持されている変換情報に従って変換処理を施す。すなわち、パルス数等の特性が情報処理部32の想定している信号の条件と一致するように変換する。
【0031】
出力信号生成部33は、入力された車速パルス信号SG11及びエンジンパルス信号SG21のそれぞれに対応する変換処理後のパルス信号を生成する。
【0032】
変換情報保持部40は、データの書き込み及び読み出しが可能な不揮発性メモリにより構成されており、必要とされる変換情報を予め保持している。また、変換情報保持部40が保持する変換情報の内容については、例えば所定の端末を車載器100の通信インタフェース61に接続しユーザが入力操作を行うことにより、必要に応じて変更することができる。変換情報の具体例については後で説明する。
【0033】
データ記憶部51は、データの書き込み及び読み出しが可能な不揮発性メモリ(FRAM)により構成されており、情報処理部32からのアクセスにより運行情報等のデータを記録するために利用される。
【0034】
一時データ記憶部52は、データの書き込み及び読み出しが可能な揮発性メモリ(SRAM)により構成されており、情報処理部32からのアクセスにより一時的に生成された様々なデータを保持するために利用される。
【0035】
カードインタフェース53は、不揮発性メモリを搭載した所定のメモリカード63を車載器100に装着するためのインタフェースである。マイクロコンピュータ30は、カードインタフェース53を介してメモリカード63にアクセスし、データを書き込んだり読み出したりすることができる。
【0036】
電源回路54は、入力側が車両のバッテリー出力や、イグニッションスイッチと接続され、車載器100の各部が必要とする安定な直流電圧を生成したり、イグニッション信号を生成する。電源回路54が出力する電力やイグニッション信号は、マイクロコンピュータ30等に供給される。
【0037】
表示部55は、液晶表示器(LCD)により構成されており、数値や文字などの情報を表示することができる。表示部55は、マイクロコンピュータ30の制御により、車載器100の動作状態を表示したり、取得した情報などを表示するために利用される。
ブザー56は、マイクロコンピュータ30により制御され、例えば異常な状態が発生した時に警報音を出力するために利用される。
【0038】
通信インタフェース61は、ユーザが特別な入力操作を行ったり変換情報保持部40の変換情報を変更するために利用可能な所定の入力端末を車載器100に接続するためのインタフェースとして機能する。
【0039】
信号出力回路62は、前述の車速パルス信号SG11及びエンジンパルス信号SG21に対応する信号を出力するためのバッファ回路を内蔵している。本実施形態では、車速パルス信号SG11に対応する出力信号とエンジンパルス信号SG21に対応する出力信号とが、それぞれ3系統に分岐され、信号出力端子71〜76から出力される。
【0040】
図1に示した例では、1系統の車速パルス信号SG12およびエンジンパルス信号SG22とを利用するために、車載器100の信号出力端子71および信号出力端子74にドライブレコーダ200が接続されている。
【0041】
<速度信号入力回路10の構成>
図1に示した速度信号入力回路10の具体的な構成例が図2に示されている。なお、エンジン信号入力回路20についても、図2に示した速度信号入力回路10と同様に構成できる。
【0042】
図2に示すように、この速度信号入力回路10は、入力切替スイッチ11、プルアップ回路12、矩形波処理用波形整形回路13、正弦波処理用波形整形回路14、および出力切替スイッチ15を備えている。
【0043】
入力切替スイッチ11は、図1に示した信号変換処理部31から出力される制御信号CON1に従って、車速パルス信号SG11の入力側の信号経路を切り替える。すなわち、制御信号CON1に応じて矩形波処理用波形整形回路13および正弦波処理用波形整形回路14のいずれかの入力に選択的に車速パルス信号SG11を印加する。
【0044】
プルアップ回路12は、図1に示した信号変換処理部31から出力される制御信号CON2に従って開閉するスイッチと、電源ラインに接続された抵抗器を有している。すなわち、矩形波処理用波形整形回路13の入力端子を抵抗器を介して電源ラインの電位にプルアップするか否かを切り替えることができる。
【0045】
車速パルス信号SG11を出力するセンサ側の出力回路は、オープンコレクタ出力として構成されている場合もあるし、エミッタフォロア出力として構成されている場合もある。センサ側がオープンコレクタ出力の場合には、プルアップ回路12のスイッチを閉じることにより、車速パルス信号SG11の高レベルを車載器100が想定している電位(電源電圧に近い電位)にすることができる。また、センサ側がエミッタフォロア出力の場合には、プルアップ回路12のスイッチを開くことにより、車速パルス信号SG11の電位をそのまま車載器100に入力できる。
【0046】
矩形波処理用波形整形回路13は、入力される車速パルス信号SG11の波形が矩形波である場合に、適切な波形整形を行い、整形後の矩形波を出力する。また、正弦波処理用波形整形回路14は、入力される車速パルス信号SG11の波形が正弦波のようなアナログ波形である場合に、信号の適切な二値化および波形整形を行い、整形後の矩形波を出力する。
【0047】
出力切替スイッチ15は、矩形波処理用波形整形回路13および正弦波処理用波形整形回路14のいずれかの出力を前述の制御信号CON1に連動して選択し、出力経路に車速パルス信号SG11bとして出力する。
【0048】
<変換情報の具体例>
図1に示した変換情報保持部40上には、次の表1に示すような構成の変換情報テーブルが設けてある。
【表1】

【0049】
表1に示したように、この変換情報テーブルにおいては、車速パルス信号SG11、エンジンパルス信号SG21のそれぞれについて、パルス変換率K1、信号波形K2、出力形式K3が変換情報として登録してある。
【0050】
パルス変換率K1は、(変換後のパルス数/変換前のパルス数)の比率を表す。変換前のパルス数は、例えば車両の変速機出力軸の1回転毎に、車載器100に入力される車速パルス信号SG11に現れるパルスの数を表す。また、変換後のパルス数は、情報処理部32が車速パルス信号を処理するうえで想定している変速機出力軸の1回転毎のパルス数(設計時の想定値)を表している。
【0051】
従って、表1に示したように車速パルス信号SG11のパルス変換率K1の値が「2」の場合には、図3に示すようなパルス数の変換が行われることになる。つまり、入力される車速パルス信号SG11に対して、変換後に出力される車速パルス信号SG12のパルス数はK1倍(2倍)になる。この変換処理は信号変換処理部31により実現される。なお、パルス変換率K1の「1」は、パルス数の調整が不要であることを意味している。
【0052】
信号波形K2は、車載器100に入力される車速パルス信号SG11、エンジンパルス信号SG21の各々の波形が、矩形波か正弦波(アナログ信号)かの区別を表している。信号波形K2の「0」は矩形波を表し、「1」は正弦波を表す。
【0053】
出力形式K3は、車載器100に入力される車速パルス信号SG11、エンジンパルス信号SG21の各々を出力するセンサ側の出力回路の形式を表している。出力形式K3の「0」はオープンコレクタ出力を表し、「1」はエミッタフォロア出力を表す。
【0054】
この変換情報テーブルに登録した変換情報の内容については、車載器100を搭載する車両側の特性に合わせてユーザが適宜変更することができる。すなわち、所定の入力端末等を通信インタフェース61に接続することにより、新しい変換情報をユーザが入力することができる。情報処理部32は、入力された変換情報により、変換情報保持部40の内容を更新する。また、必要な変換情報を例えばメモリカード63から読み込んで変換情報保持部40に登録することもできる。
【0055】
<装置の動作>
図1に示した装置の主要な動作が図4に示されている。図4に示す動作は、マイクロコンピュータ30の処理によって実現する。図4に示すマイクロコンピュータ30の動作について以下に説明する。
【0056】
車両側から車載器100に電源が供給されると、マイクロコンピュータ30は最初にステップS11で初期化を行う。この初期化には、速度信号入力回路10及びエンジン信号入力回路20の初期化も含まれている。
【0057】
速度信号入力回路10の初期化については、車速パルス信号SG11に対する変換情報(表1参照)の信号波形K2および出力形式K3を信号変換処理部31が変換情報保持部40から読み込み、これらを制御信号CON1、CON2として速度信号入力回路10に与える。
【0058】
また、エンジン信号入力回路20の初期化については、エンジンパルス信号SG21に対する変換情報の信号波形K2および出力形式K3を信号変換処理部31が変換情報保持部40から読み込み、これらを制御信号CON1、CON2としてエンジン信号入力回路20に与える。
【0059】
これにより、速度信号入力回路10及びエンジン信号入力回路20は、車速パルス信号SG11及びエンジンパルス信号SG21の信号波形の違いや出力回路形式の違いに対して自動的に対応できる。
【0060】
ステップS12では、マイクロコンピュータ30は電源回路54の出力を監視し、車両のイグニッション(IGN)がオンになったか否かを識別する。イグニッションがオンになると次のステップS13に進む。
【0061】
ステップS13では、マイクロコンピュータ30の信号変換処理部31は、変換情報保持部40上の変換情報テーブルを参照し、各信号SG11、SG21に対する変換情報のパルス変換率K1が「1」以外の値であるか否かを識別する。パルス変換率K1が「1」以外の場合には、該当する信号に対してパルス数の調整(変換)が必要なので次のステップS14を実行する。パルス変換率K1が「1」の信号についてはステップS14を省略してステップS15に進む。
【0062】
ステップS14では、後述するステップS16、S17においてパルス数が前記パルス変換率K1に合わせて自動的に調整されるように信号変換処理部31が制御用のパラメータを決定する。
【0063】
ステップS15では、車速パルス信号SG11に対応する速度信号入力回路10の出力およびエンジンパルス信号SG21に対応するエンジン信号入力回路20の出力を信号変換処理部31が監視して、パルスの立ち上がりエッジ又は立ち下がりエッジを新たなパルス入力として検出する。新たなパルスの入力を検出すると、次のステップS16を実行する。
【0064】
ステップS16では、信号変換処理部31が、入力された車速パルス信号SG11およびエンジンパルス信号SG21に基づいて車両の速度(車速)およびエンジン回転速度(rpm)を算出する。例えば、ステップS15でパルスのエッジを検出した回数から一定時間内に現れたパルス数を求め、これを車速あるいはエンジン回転速度に換算する。また、パルス数を求める際には、ステップS14で決定したパラメータに従ってパルス数を調整する。例えば、パルス変換率K1が「2」の場合には、ステップS15で実際に検出したパルス数の2倍の値を用いて車速あるいはエンジン回転速度を算出する。
【0065】
ステップS17では、信号出力端子71〜76から出力すべき車速パルス信号SG12およびエンジンパルス信号SG22を出力信号生成部33が生成する。すなわち、ステップS15で検出したパルスエッジのタイミングに同期して、車速パルス信号SG12およびエンジンパルス信号SG22に対応する二値信号を出力信号生成部33が信号出力回路62に出力する。
【0066】
また、出力信号生成部33が生成する二値信号のパルス数(周期)については、入力信号(SG11,SG21)のパルス数をステップS14で決定したパラメータに従って調整した結果と一致するように制御する。例えば、車速パルス信号SG11のパルス変換率K1の値が「2」の場合には、図3に示すように入力される車速パルス信号SG11に対して、パルス数が2倍の車速パルス信号SG12が出力されるように、車速パルス信号SG12と同じ二値信号を出力信号生成部33が生成する。
【0067】
従って、様々な仕様のセンサを搭載した車両上にデジタルタコグラフ等の車載器を設置する場合であっても、センサの出力と車載器の入力との間に特別なパルス整合器を挿入する必要がない。また、ユーザが決定した任意の値をパルス変換率K1として変換情報保持部40に登録できるので、仕様の適合性の有無を事前に調べる必要もなく、簡単に設置できる。また、パルス数だけでなく、信号波形の違いやセンサ側の出力回路形式の違いに対しても変換情報保持部40に保持する変換情報により対応できる。
【0068】
また、変換後の信号(SG12,SG22)を車載器100から出力するので、図1に示すように、デジタルタコグラフから出力される信号をそのままドライブレコーダ200等の他の車載器に入力することができる。
【0069】
なお、図1に示した例では、本発明の車載情報処理装置としてデジタルタコグラフを想定しているが、他の車載器、例えばドライブレコーダや計器板ユニットを車載情報処理装置として構成することも可能である。
【符号の説明】
【0070】
10 速度信号入力回路
11 入力切替スイッチ
12 プルアップ回路
13 矩形波処理用波形整形回路
14 正弦波処理用波形整形回路
15 出力切替スイッチ
20 エンジン信号入力回路
30 マイクロコンピュータ
31 信号変換処理部
32 情報処理部
33 出力信号生成部
40 変換情報保持部
51 データ記憶部
52 一時データ記憶部
53 カードインタフェース
54 電源回路
55 表示部
56 ブザー
61 通信インタフェース
62 信号出力回路
63 メモリカード
71,72,73,74,75,76 信号出力端子
100 車載器
200 ドライブレコーダ
CON1,CON2 制御信号
SG11,SG11b,SG12 車速パルス信号
SG21,SG22 エンジンパルス信号
【技術分野】
【0001】
本発明は、入力した車速パルス等の信号に基づいて車両の情報を取得しこの情報を処理する車載情報処理装置に関する。
【背景技術】
【0002】
従来より、乗用車や業務用の各種車両には車速等の車両の情報を必要とする様々な車載器が搭載されている。例えば、業務用のトラック等の車両には、運行状態を表す車速等の情報を定期的に取得して自動的に記録するデジタルタコグラフや、事故などの際にカメラで撮影した画像や車速などの情報を記録するドライブレコーダが搭載されている。また、車速等の情報を取得してリアルタイムで表示する計器板ユニットも全ての車両に搭載されている。
【0003】
ところで、一般的な車両においては、車速の情報を得るために変速機の出力軸に車速センサが搭載されている。この車速センサは、変速機の出力軸が所定量回動する毎に1つのパルス信号を出力する。従って、車速センサから出力されるパルス信号(すなわち車速パルス)のパルス周期に基づいて現在の車速を把握することができる。
【0004】
また、4輪自動車のスピードメータの指示に関しては、JIS規格において、車速が60km/hの時に、車速センサの駆動回転速度が637rpmになるように規定されている。また、駆動軸1回転あたりの車速センサ発生パルス数が4、8、16、20、25のいずれかの値になるように規定されている。
【0005】
つまり、駆動軸1回転あたりの車速センサ発生パルス数は、それぞれの車両の仕様に応じて異なる可能性がある。例えば、このパルス数が4の車両とパルス数が8の車両とでは、同じ速度で走行している時であっても、車速パルスの周期が大きく異なる。また、例えば車両のタイヤのサイズ等が変化すると、車速パルスの周期と実際の車速との関係に変化が生じる。
【0006】
一方、一般的なデジタルタコグラフやドライブレコーダ等の車載器側は、車両側から入力される車速パルスの周期と車速との関係が一定であることを想定して設計されている。従って、仕様が合わない車両に車載器を搭載しようとする場合には、車載器が想定している車速パルスの周期と車速との関係と、実際の車速パルスの仕様とが一致しなくなり、正しい車速を認識できない。
【0007】
そこで、仕様が合わない車両に対してデジタルタコグラフやドライブレコーダ等の車載器を搭載しようとする場合には、車両側の車速センサの出力端子と車載器の入力端子との間に、パルス整合器と呼ばれる装置を介在し、車載器が必要とする特性の車速パルスを生成するように接続していた。
【0008】
パルス整合器は、車速センサから入力される車速パルスから、パルス数や周期の特性が異なる車速パルスを生成する装置である。パルス整合器に関する従来技術は、例えば特許文献1に開示されている。
【0009】
また、特許文献2に開示されているような車速パルス信号発生装置が用いられる場合もある。車速パルス信号発生装置は、他の装置から取得した車速の情報に基づいて特定の車載器が必要とする車速パルス信号を生成することができる。
【0010】
また、車速センサ等のパルス数と電位レベルとを多岐にわたり変換して複数の出力を得る車速信号の信号変換装置が特許文献3に開示されている。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2006−78266号公報
【特許文献2】特開2008−190935号公報
【特許文献3】特開平8−320328号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、車速センサ等の出力とデジタルタコグラフ、ドライブレコーダ等の車載器の入力との間に上記のパルス整合器を接続する場合には、パルス整合器のために特別な設置スペースを確保しなければならないし、配線が増えて設置作業の負担も増える。
【0013】
また、取り付けの際には、車速センサ側の仕様と車載器側の仕様とを事前に調べて、両者を整合させるのに必要な機能を備えている特定のパルス整合器を選別しなければならない。特に、車速センサ等のセンサ側の仕様については、パルス数の他にも信号波形の違いや、センサ出力回路の構成の違いを考慮しなければならず、条件に適合するパルス整合器を特定する作業は容易ではない。
【0014】
また、パルス整合器を接続して車速センサ側の仕様と車載器側の仕様とを整合させた場合であっても、例えば車両に装着するタイヤのサイズを変更したような場合には、車載器側が認識する車速が実際の車速と微妙にずれて誤差が生じる可能性もある。
【0015】
また、車両の車速センサの出力にデジタルタコグラフ、ドライブレコーダ等の複数台の車載器を並列に接続する場合には、車速センサの負荷が過大になり、車速センサから出力される車速パルスの波形が乱れたり車速パルスの電位が異常になり誤動作が生じる可能性もある。
【0016】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、様々な仕様のセンサ出力を利用して情報を取得する場合であっても、特別なパルス整合器を接続することなく正しい情報を取得することが可能な車載情報処理装置を提供することにある。
【課題を解決するための手段】
【0017】
前述した目的を達成するために、本発明に係る車載情報処理装置は、下記(1)〜(5)を特徴としている。
(1) 少なくとも車両側から出力される車速パルス信号を入力する信号入力端子と、
前記信号入力端子に入力される信号に基づいて車両の情報を取得すると共に、取得した情報に関する記録処理および表示処理の少なくとも一方を行う情報処理部と、
少なくとも前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部と、
前記変換情報保持部が保持している変換情報に従って、前記信号入力端子に入力された信号を変換処理して、前記情報処理部が必要とする情報を生成する信号変換処理部と
を備えること。
(2) 上記(1)に記載の車載情報処理装置であって、
1つもしくは複数の信号出力端子を更に備え、
前記信号変換処理部は、前記信号入力端子に入力された第1の信号を変換処理して、変換処理後の第2の信号を生成し、前記第2の信号を前記信号出力端子から出力する出力信号生成部を備えること。
(3) 上記(1)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、少なくとも前記信号入力端子に入力される第1の信号と前記情報処理部が扱う第2の信号とのパルス数の比率に相当する情報を保持すること。
(4) 上記(3)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号の波形を表す情報を更に保持すること。
(5) 上記(3)に記載の車載情報処理装置であって、
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号を出力する回路の形式の違いを表す情報を更に保持すること。
【0018】
上記(1)の構成の車載情報処理装置によれば、前記変換情報保持部が保持する変換情報の内容を適切に書き換えるだけで、パルス整合器を接続しなくても様々な条件のセンサ出力に対応できる。
上記(2)の構成の車載情報処理装置によれば、本装置の出力側に、例えばドライブレコーダなど他の車載器を接続することが可能になる。これにより、車両側のセンサ出力に複数の車載器を並列に接続する必要がなくなり、信号波形の乱れや信号電位が異常になるのを避けることができる。
上記(3)の構成の車載情報処理装置によれば、本装置が想定している信号と接続された車両側のセンサとのパルス数に関する特性の違いを、パルス整合器を接続することなく整合させることができる。
上記(4)の構成の車載情報処理装置によれば、本装置が想定している信号と接続された車両側のセンサとの信号波形に関する特性の違いを、パルス整合器を接続することなく整合させることができる。
上記(5)の構成の車載情報処理装置によれば、接続された車両側のセンサの出力回路に関する形式の違いに対して、パルス整合器を接続することなく対応することができる。
【発明の効果】
【0019】
本発明によれば、様々な仕様のセンサ出力を利用して情報を取得する場合であっても、特別なパルス整合器を接続することなく正しい情報を取得することが可能になる。従って、装置全体のコストを低減することができ、車載器を設置する作業も簡単になり、パルス整合器を設置するための空間を確保する必要もなくなる。
【0020】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0021】
【図1】図1は、実施形態の車載情報処理装置の構成例を示すブロック図である。
【図2】図2は、図1に示した速度信号入力回路の構成例を示すブロック図である。
【図3】図3は、入力される車速パルスと変換後の車速パルスの具体例を示す波形図である。
【図4】図4は、図1に示した装置の主要な動作を示すフローチャートである。
【発明を実施するための形態】
【0022】
本発明の車載情報処理装置に関する具体的な実施の形態について、各図を参照しながら以下に説明する。
【0023】
<装置全体の構成>
本実施形態における車載情報処理装置の構成例が図1に示されている。図1に示す車載器100は、車両に搭載されるデジタルタコグラフとして構成されている。この車載器100が本発明の車載情報処理装置に相当する。勿論、デジタルタコグラフ以外の車載器に本発明を適用することも可能である。
【0024】
図1に示す車載器100は、これを搭載した車両の運行中に、実際の車速やエンジン回転速度に関する情報を自動的に収集し、そのデータをメモリカード63に記録することができる。勿論、現実的なデジタルタコグラフにおいては、車速やエンジン回転速度以外にも様々な情報を収集して記録できるが、図1の例ではそれらの記載を省略してある。
【0025】
図1に示すように、この車載器100は、速度信号入力回路10、エンジン信号入力回路20、マイクロコンピュータ30、変換情報保持部40、データ記憶部51、一時データ記憶部52、カードインタフェース(I/F)53、電源回路54、表示部55、ブザー56、通信インタフェース61、信号出力回路62、および信号出力端子71〜76を備えている。
【0026】
速度信号入力回路10は、車両側に搭載されている車速センサから出力される車速パルス信号SG11を入力し、マイクロコンピュータ30が処理可能な信号に変換する。車速センサは、一般的に車両の変速機に組み込まれており、変速機の出力軸が所定量回動する毎にパルスを出力するように構成される。後述するように、速度信号入力回路10は様々な形式の車速パルス信号SG11に対応可能に構成されている。
【0027】
エンジン信号入力回路20は、車両側に搭載されているエンジン回転センサから出力されるエンジンパルス信号SG21を入力し、マイクロコンピュータ30が処理可能な信号に変換する。エンジン回転センサは、エンジンの出力軸の回動を検出し、この出力軸が所定量回動する毎にパルスを出力するように構成される。
【0028】
マイクロコンピュータ30は、予め組み込まれているプログラムを実行することにより、デジタルタコグラフの制御に必要な各種の機能を実現する。本実施形態では、マイクロコンピュータ30の代表的な機能として、信号変換処理部31、情報処理部32、及び出力信号生成部33が備わっている。
【0029】
情報処理部32は、入力される車速パルス信号SG11やエンジンパルス信号SG21などにより得られる車両の運行情報を定期的に収集し、得られたデータをメモリカード63上に自動的に記録する。
【0030】
信号変換処理部31は、速度信号入力回路10、エンジン信号入力回路20を介して入力される車速パルス信号SG11及びエンジンパルス信号SG21のそれぞれについて、変換情報保持部40に保持されている変換情報に従って変換処理を施す。すなわち、パルス数等の特性が情報処理部32の想定している信号の条件と一致するように変換する。
【0031】
出力信号生成部33は、入力された車速パルス信号SG11及びエンジンパルス信号SG21のそれぞれに対応する変換処理後のパルス信号を生成する。
【0032】
変換情報保持部40は、データの書き込み及び読み出しが可能な不揮発性メモリにより構成されており、必要とされる変換情報を予め保持している。また、変換情報保持部40が保持する変換情報の内容については、例えば所定の端末を車載器100の通信インタフェース61に接続しユーザが入力操作を行うことにより、必要に応じて変更することができる。変換情報の具体例については後で説明する。
【0033】
データ記憶部51は、データの書き込み及び読み出しが可能な不揮発性メモリ(FRAM)により構成されており、情報処理部32からのアクセスにより運行情報等のデータを記録するために利用される。
【0034】
一時データ記憶部52は、データの書き込み及び読み出しが可能な揮発性メモリ(SRAM)により構成されており、情報処理部32からのアクセスにより一時的に生成された様々なデータを保持するために利用される。
【0035】
カードインタフェース53は、不揮発性メモリを搭載した所定のメモリカード63を車載器100に装着するためのインタフェースである。マイクロコンピュータ30は、カードインタフェース53を介してメモリカード63にアクセスし、データを書き込んだり読み出したりすることができる。
【0036】
電源回路54は、入力側が車両のバッテリー出力や、イグニッションスイッチと接続され、車載器100の各部が必要とする安定な直流電圧を生成したり、イグニッション信号を生成する。電源回路54が出力する電力やイグニッション信号は、マイクロコンピュータ30等に供給される。
【0037】
表示部55は、液晶表示器(LCD)により構成されており、数値や文字などの情報を表示することができる。表示部55は、マイクロコンピュータ30の制御により、車載器100の動作状態を表示したり、取得した情報などを表示するために利用される。
ブザー56は、マイクロコンピュータ30により制御され、例えば異常な状態が発生した時に警報音を出力するために利用される。
【0038】
通信インタフェース61は、ユーザが特別な入力操作を行ったり変換情報保持部40の変換情報を変更するために利用可能な所定の入力端末を車載器100に接続するためのインタフェースとして機能する。
【0039】
信号出力回路62は、前述の車速パルス信号SG11及びエンジンパルス信号SG21に対応する信号を出力するためのバッファ回路を内蔵している。本実施形態では、車速パルス信号SG11に対応する出力信号とエンジンパルス信号SG21に対応する出力信号とが、それぞれ3系統に分岐され、信号出力端子71〜76から出力される。
【0040】
図1に示した例では、1系統の車速パルス信号SG12およびエンジンパルス信号SG22とを利用するために、車載器100の信号出力端子71および信号出力端子74にドライブレコーダ200が接続されている。
【0041】
<速度信号入力回路10の構成>
図1に示した速度信号入力回路10の具体的な構成例が図2に示されている。なお、エンジン信号入力回路20についても、図2に示した速度信号入力回路10と同様に構成できる。
【0042】
図2に示すように、この速度信号入力回路10は、入力切替スイッチ11、プルアップ回路12、矩形波処理用波形整形回路13、正弦波処理用波形整形回路14、および出力切替スイッチ15を備えている。
【0043】
入力切替スイッチ11は、図1に示した信号変換処理部31から出力される制御信号CON1に従って、車速パルス信号SG11の入力側の信号経路を切り替える。すなわち、制御信号CON1に応じて矩形波処理用波形整形回路13および正弦波処理用波形整形回路14のいずれかの入力に選択的に車速パルス信号SG11を印加する。
【0044】
プルアップ回路12は、図1に示した信号変換処理部31から出力される制御信号CON2に従って開閉するスイッチと、電源ラインに接続された抵抗器を有している。すなわち、矩形波処理用波形整形回路13の入力端子を抵抗器を介して電源ラインの電位にプルアップするか否かを切り替えることができる。
【0045】
車速パルス信号SG11を出力するセンサ側の出力回路は、オープンコレクタ出力として構成されている場合もあるし、エミッタフォロア出力として構成されている場合もある。センサ側がオープンコレクタ出力の場合には、プルアップ回路12のスイッチを閉じることにより、車速パルス信号SG11の高レベルを車載器100が想定している電位(電源電圧に近い電位)にすることができる。また、センサ側がエミッタフォロア出力の場合には、プルアップ回路12のスイッチを開くことにより、車速パルス信号SG11の電位をそのまま車載器100に入力できる。
【0046】
矩形波処理用波形整形回路13は、入力される車速パルス信号SG11の波形が矩形波である場合に、適切な波形整形を行い、整形後の矩形波を出力する。また、正弦波処理用波形整形回路14は、入力される車速パルス信号SG11の波形が正弦波のようなアナログ波形である場合に、信号の適切な二値化および波形整形を行い、整形後の矩形波を出力する。
【0047】
出力切替スイッチ15は、矩形波処理用波形整形回路13および正弦波処理用波形整形回路14のいずれかの出力を前述の制御信号CON1に連動して選択し、出力経路に車速パルス信号SG11bとして出力する。
【0048】
<変換情報の具体例>
図1に示した変換情報保持部40上には、次の表1に示すような構成の変換情報テーブルが設けてある。
【表1】
【0049】
表1に示したように、この変換情報テーブルにおいては、車速パルス信号SG11、エンジンパルス信号SG21のそれぞれについて、パルス変換率K1、信号波形K2、出力形式K3が変換情報として登録してある。
【0050】
パルス変換率K1は、(変換後のパルス数/変換前のパルス数)の比率を表す。変換前のパルス数は、例えば車両の変速機出力軸の1回転毎に、車載器100に入力される車速パルス信号SG11に現れるパルスの数を表す。また、変換後のパルス数は、情報処理部32が車速パルス信号を処理するうえで想定している変速機出力軸の1回転毎のパルス数(設計時の想定値)を表している。
【0051】
従って、表1に示したように車速パルス信号SG11のパルス変換率K1の値が「2」の場合には、図3に示すようなパルス数の変換が行われることになる。つまり、入力される車速パルス信号SG11に対して、変換後に出力される車速パルス信号SG12のパルス数はK1倍(2倍)になる。この変換処理は信号変換処理部31により実現される。なお、パルス変換率K1の「1」は、パルス数の調整が不要であることを意味している。
【0052】
信号波形K2は、車載器100に入力される車速パルス信号SG11、エンジンパルス信号SG21の各々の波形が、矩形波か正弦波(アナログ信号)かの区別を表している。信号波形K2の「0」は矩形波を表し、「1」は正弦波を表す。
【0053】
出力形式K3は、車載器100に入力される車速パルス信号SG11、エンジンパルス信号SG21の各々を出力するセンサ側の出力回路の形式を表している。出力形式K3の「0」はオープンコレクタ出力を表し、「1」はエミッタフォロア出力を表す。
【0054】
この変換情報テーブルに登録した変換情報の内容については、車載器100を搭載する車両側の特性に合わせてユーザが適宜変更することができる。すなわち、所定の入力端末等を通信インタフェース61に接続することにより、新しい変換情報をユーザが入力することができる。情報処理部32は、入力された変換情報により、変換情報保持部40の内容を更新する。また、必要な変換情報を例えばメモリカード63から読み込んで変換情報保持部40に登録することもできる。
【0055】
<装置の動作>
図1に示した装置の主要な動作が図4に示されている。図4に示す動作は、マイクロコンピュータ30の処理によって実現する。図4に示すマイクロコンピュータ30の動作について以下に説明する。
【0056】
車両側から車載器100に電源が供給されると、マイクロコンピュータ30は最初にステップS11で初期化を行う。この初期化には、速度信号入力回路10及びエンジン信号入力回路20の初期化も含まれている。
【0057】
速度信号入力回路10の初期化については、車速パルス信号SG11に対する変換情報(表1参照)の信号波形K2および出力形式K3を信号変換処理部31が変換情報保持部40から読み込み、これらを制御信号CON1、CON2として速度信号入力回路10に与える。
【0058】
また、エンジン信号入力回路20の初期化については、エンジンパルス信号SG21に対する変換情報の信号波形K2および出力形式K3を信号変換処理部31が変換情報保持部40から読み込み、これらを制御信号CON1、CON2としてエンジン信号入力回路20に与える。
【0059】
これにより、速度信号入力回路10及びエンジン信号入力回路20は、車速パルス信号SG11及びエンジンパルス信号SG21の信号波形の違いや出力回路形式の違いに対して自動的に対応できる。
【0060】
ステップS12では、マイクロコンピュータ30は電源回路54の出力を監視し、車両のイグニッション(IGN)がオンになったか否かを識別する。イグニッションがオンになると次のステップS13に進む。
【0061】
ステップS13では、マイクロコンピュータ30の信号変換処理部31は、変換情報保持部40上の変換情報テーブルを参照し、各信号SG11、SG21に対する変換情報のパルス変換率K1が「1」以外の値であるか否かを識別する。パルス変換率K1が「1」以外の場合には、該当する信号に対してパルス数の調整(変換)が必要なので次のステップS14を実行する。パルス変換率K1が「1」の信号についてはステップS14を省略してステップS15に進む。
【0062】
ステップS14では、後述するステップS16、S17においてパルス数が前記パルス変換率K1に合わせて自動的に調整されるように信号変換処理部31が制御用のパラメータを決定する。
【0063】
ステップS15では、車速パルス信号SG11に対応する速度信号入力回路10の出力およびエンジンパルス信号SG21に対応するエンジン信号入力回路20の出力を信号変換処理部31が監視して、パルスの立ち上がりエッジ又は立ち下がりエッジを新たなパルス入力として検出する。新たなパルスの入力を検出すると、次のステップS16を実行する。
【0064】
ステップS16では、信号変換処理部31が、入力された車速パルス信号SG11およびエンジンパルス信号SG21に基づいて車両の速度(車速)およびエンジン回転速度(rpm)を算出する。例えば、ステップS15でパルスのエッジを検出した回数から一定時間内に現れたパルス数を求め、これを車速あるいはエンジン回転速度に換算する。また、パルス数を求める際には、ステップS14で決定したパラメータに従ってパルス数を調整する。例えば、パルス変換率K1が「2」の場合には、ステップS15で実際に検出したパルス数の2倍の値を用いて車速あるいはエンジン回転速度を算出する。
【0065】
ステップS17では、信号出力端子71〜76から出力すべき車速パルス信号SG12およびエンジンパルス信号SG22を出力信号生成部33が生成する。すなわち、ステップS15で検出したパルスエッジのタイミングに同期して、車速パルス信号SG12およびエンジンパルス信号SG22に対応する二値信号を出力信号生成部33が信号出力回路62に出力する。
【0066】
また、出力信号生成部33が生成する二値信号のパルス数(周期)については、入力信号(SG11,SG21)のパルス数をステップS14で決定したパラメータに従って調整した結果と一致するように制御する。例えば、車速パルス信号SG11のパルス変換率K1の値が「2」の場合には、図3に示すように入力される車速パルス信号SG11に対して、パルス数が2倍の車速パルス信号SG12が出力されるように、車速パルス信号SG12と同じ二値信号を出力信号生成部33が生成する。
【0067】
従って、様々な仕様のセンサを搭載した車両上にデジタルタコグラフ等の車載器を設置する場合であっても、センサの出力と車載器の入力との間に特別なパルス整合器を挿入する必要がない。また、ユーザが決定した任意の値をパルス変換率K1として変換情報保持部40に登録できるので、仕様の適合性の有無を事前に調べる必要もなく、簡単に設置できる。また、パルス数だけでなく、信号波形の違いやセンサ側の出力回路形式の違いに対しても変換情報保持部40に保持する変換情報により対応できる。
【0068】
また、変換後の信号(SG12,SG22)を車載器100から出力するので、図1に示すように、デジタルタコグラフから出力される信号をそのままドライブレコーダ200等の他の車載器に入力することができる。
【0069】
なお、図1に示した例では、本発明の車載情報処理装置としてデジタルタコグラフを想定しているが、他の車載器、例えばドライブレコーダや計器板ユニットを車載情報処理装置として構成することも可能である。
【符号の説明】
【0070】
10 速度信号入力回路
11 入力切替スイッチ
12 プルアップ回路
13 矩形波処理用波形整形回路
14 正弦波処理用波形整形回路
15 出力切替スイッチ
20 エンジン信号入力回路
30 マイクロコンピュータ
31 信号変換処理部
32 情報処理部
33 出力信号生成部
40 変換情報保持部
51 データ記憶部
52 一時データ記憶部
53 カードインタフェース
54 電源回路
55 表示部
56 ブザー
61 通信インタフェース
62 信号出力回路
63 メモリカード
71,72,73,74,75,76 信号出力端子
100 車載器
200 ドライブレコーダ
CON1,CON2 制御信号
SG11,SG11b,SG12 車速パルス信号
SG21,SG22 エンジンパルス信号
【特許請求の範囲】
【請求項1】
少なくとも車両側から出力される車速パルス信号を入力する信号入力端子と、
前記信号入力端子に入力される信号に基づいて車両の情報を取得すると共に、取得した情報に関する記録処理および表示処理の少なくとも一方を行う情報処理部と、
少なくとも前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部と、
前記変換情報保持部が保持している変換情報に従って、前記信号入力端子に入力された信号を変換処理して、前記情報処理部が必要とする情報を生成する信号変換処理部と
を備えることを特徴とする車載情報処理装置。
【請求項2】
1つもしくは複数の信号出力端子を更に備え、
前記信号変換処理部は、前記信号入力端子に入力された第1の信号を変換処理して、変換処理後の第2の信号を生成し、前記第2の信号を前記信号出力端子から出力する出力信号生成部を備える
ことを特徴とする請求項1に記載の車載情報処理装置。
【請求項3】
前記変換情報保持部は、前記変換情報として、少なくとも前記信号入力端子に入力される第1の信号と前記情報処理部が扱う第2の信号とのパルス数の比率に相当する情報を保持する
ことを特徴とする請求項1に記載の車載情報処理装置。
【請求項4】
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号の波形を表す情報を更に保持する
ことを特徴とする請求項3に記載の車載情報処理装置。
【請求項1】
少なくとも車両側から出力される車速パルス信号を入力する信号入力端子と、
前記信号入力端子に入力される信号に基づいて車両の情報を取得すると共に、取得した情報に関する記録処理および表示処理の少なくとも一方を行う情報処理部と、
少なくとも前記信号入力端子に入力される信号の特性と、前記情報処理部が扱う信号の規格との対応関係を表す変換情報を保持する変換情報保持部と、
前記変換情報保持部が保持している変換情報に従って、前記信号入力端子に入力された信号を変換処理して、前記情報処理部が必要とする情報を生成する信号変換処理部と
を備えることを特徴とする車載情報処理装置。
【請求項2】
1つもしくは複数の信号出力端子を更に備え、
前記信号変換処理部は、前記信号入力端子に入力された第1の信号を変換処理して、変換処理後の第2の信号を生成し、前記第2の信号を前記信号出力端子から出力する出力信号生成部を備える
ことを特徴とする請求項1に記載の車載情報処理装置。
【請求項3】
前記変換情報保持部は、前記変換情報として、少なくとも前記信号入力端子に入力される第1の信号と前記情報処理部が扱う第2の信号とのパルス数の比率に相当する情報を保持する
ことを特徴とする請求項1に記載の車載情報処理装置。
【請求項4】
前記変換情報保持部は、前記変換情報として、前記信号入力端子に入力される第1の信号の波形を表す情報を更に保持する
ことを特徴とする請求項3に記載の車載情報処理装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−61182(P2013−61182A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−198555(P2011−198555)
【出願日】平成23年9月12日(2011.9.12)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
[ Back to top ]