
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法に係り、とくに、自車前方の走行環境を認識して自車の速度を制御する自動車の走行制御システム、自動車の走行制御装置及び方法に関する。
【背景技術】
【0002】
従来のナビゲーションシステムにおいては、GPS(Global Positioning System:衛星航法システム)から受信した自車位置の情報とDVD−ROMやハードディスクに記憶された地図DB(Data Base:データベース)に基づいて、走行経路の検出を行っている。例えば、特許文献1には、走行経路の検出を行うナビゲーションシステムの持つ地図情報からカーブ路を抽出し、そのカーブ路の道路特性に応じた目標速度を設定して、カーブ路に進入する前に速度を低下させて安全な走行を実現するシステムが記載されている。
【0003】
【特許文献1】特開平04−236699号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のシステムを実現するためには、GPSならびに地図DBの高精度化が重要となるが、このGPSを使用するものは、地形によってはマルチパスが起こることや衛星が捕捉できないことで、精度が著しく低下することがある。そのために、ジャイロセンサ及び車速センサによって推定する、いわゆる自律航法による自車位置の補正を行う方法があるが、この場合でも蛇行やタイヤの空気圧変化やスリップ等によって地図DBを用いて特定した自車位置に誤差が発生する。
【0005】
このため、従来のナビゲーションシステムでは、自車がカーブや交差点等で操舵を行ったことをジャイロセンサ等で感知することによって、自車が保有するナビゲーション地図上の道路に修正するマップマッチング機能を行うものがある。ところが、この方法では、自車の地図上の位置が、カーブや交差点等で実際の操舵をしてから補正されるため、分岐路や立体交差、並行道路を認識できずに走行経路を誤検出する場合が存在する。例えば、分岐後の経路の一方が直線路、もう一方がカーブ路であった場合に、前方にカーブが存在するにもかかわらず、分岐路の誤判断によりカーブ路を検出できずに減速タイミングが遅れ、運転者に違和感を与える可能性がある。また、立体交差や並行道路においても同様の現象が発生する。
【0006】
また、速度の自動調整を行う際の課題として、料金収受装置(以下、料金所と称する)付近の対応が考えられる。近年では、ETC(Electronic Toll Collection Systems:自動料金収受システム)の普及がめざましく、従来の手動による料金所とETCが混在している場所が数多く見受けられる。ETCは高速道路などのゲート付近の交通渋滞緩和を目的として開発されたシステムであり、料金所を通過する際にゲートと車載機の間で通信することにより自動的に料金の支払いを行う。したがって、ゲートを通過する所要時間の大幅な短縮が期待される。しかし、さらなる利便化を目的として料金所付近で速度の自動調整を行う場合には、ETC装着車と手動による料金所を利用する車(以下、一般車と称する)とでゲート通過時の目標速度が異なるため、各車が利用する料金所の種類に応じて目標速度の設定を行う必要がある。例えば、ゲート通過時におけるETC装着車の推奨速度は約20km/hであり、一般車は料金を手動で支払うために0km/hに設定する必要がある。
【0007】
本発明の目的は、従来技術の問題点に鑑み、速度の自動調整をスムーズに行うことにより違和感の無い運転支援を可能にする点にある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0009】
好ましくは、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする。
【0010】
好ましくは、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする。
【0011】
また、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0012】
好ましくは、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする。
【0013】
好ましくは、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする。
【0014】
さらに、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0015】
好ましくは、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする。
【0016】
好ましくは、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする。
【発明の効果】
【0017】
本発明によれば、走行経路を検出して目標速度の設定を行い、設定された目標速度に応じて自車の速度を制御する自動車において、自車の走行車線、走行経路の勾配情報を認識することにより周囲の状況に応じた速度の自動調整をスムーズに行うことが可能となる。
【0018】
また、本発明により、走行経路の誤検出によって生じる乗員の違和感を低減できる。
【0019】
また、複数の種類の料金所が混在する場所において、料金所の情報を認識することにより目標速度の設定を変更することが可能となり、速度の自動調整を行う領域が拡大して運転者の負荷を軽減できる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施形態について図面を用いて詳細に説明する。最初に、図1から図6を用いて、自車の走行車線を認識する走行環境認識手段を備えた自動車の走行制御システムについて説明する。
【0021】
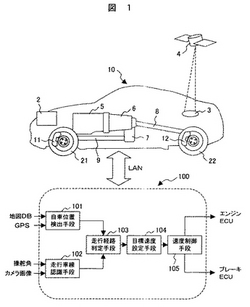
図1は本発明の一実施形態に係る走行制御システムの構成図である。車体10には、エンジン5および変速機6が搭載され、エンジン5で発生したトルクは変速機6、プロペラシャフト8を介してタイヤ22に伝達される。また、変速機6から出力するトルクは動力分割機構7によりプロペラシャフト9を介してタイヤ21、22に伝達される。上記エンジン5のトルクは、図示しないエンジンECU(Electric Control Unit)の制御信号にしたがい調整される。
【0022】
タイヤ21、22にはそれぞれ、ブースター等のアクチュエータにより制御されるブレーキ11、12が取付けられ、運転者のブレーキ操作または図示しないブレーキECUの制御信号により押付け力を発生させてタイヤ21、22の回転を減速することにより車体10の制動力を調整する。
【0023】
また、車体10には、画像情報を取得して外界状況を検出するカメラ2や、GPS4を利用して自車位置に関する情報(おもに緯度、経度)を受信するアンテナ3が搭載されている。これらのセンサおよびエンジンECU、ブレーキECU等にはLAN(Local Area Network)により通信を行う走行制御装置100が搭載されている。
【0024】
次に、走行制御装置100の構成および処理について説明する。走行制御装置100は、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103、目標速度設定手段104、速度制御手段105から構成され、以下に示す処理の内容は、走行制御装置100の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0025】
自車位置検出手段101は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。
【0026】
走行車線認識手段102は、カメラ2により検出した画像情報や、図示しないステアリングの操舵角に応じて自車の走行車線を認識する。前記操舵角は操舵角検出手段である操舵角センサやステアリングのアクチュエータとして使用されるモータの回転角度などにより検出される。
【0027】
走行経路判定手段103は、自車位置検出手段101により検出または推定された自車位置と走行車線認識手段102により認識された走行車線に応じて走行経路を判定する。
【0028】
目標速度設定手段104は、走行経路判定手段104により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0029】
速度制御手段105は、目標速度設定手段104により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段105により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0030】
本発明の実施例は、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103、目標速度設定手段104、速度制御手段105の処理を1つのECU内で実現している例を示しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0031】
エンジンECUは、速度制御手段105から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段105から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0032】
以上説明したように、走行制御装置100を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0033】
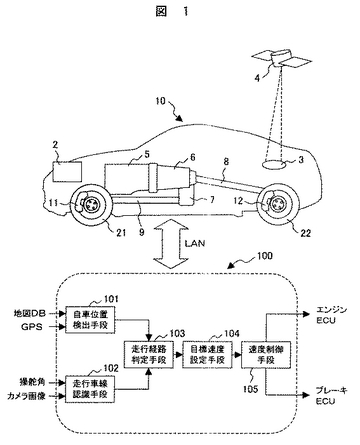
次に、自車位置検出手段101の処理内容について説明する。図2は、自車位置検出手段101の処理内容を示すフローチャートである。
【0034】
まず、ステップ201において、GPS4からアンテナ3により受信した自車位置の情報(緯度、経度等)を読込み、ステップ202において、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報を読込む。
【0035】
次に、ステップ203において、ステップ201にて読み込まれた自車位置の情報を用いて、ステップ202にて読み込まれた地図DBに自車位置をマッチングする処理を行う。マッチング処理の一例としては、地図上にメッシュを作成し、自車位置(緯度、経度)と地図上のメッシュ格子点の位置を比較して、自車位置の最も近傍にあるメッシュ格子点に自車位置をマッチングするマップ・マッチングが一般的である。
【0036】
ステップ204において、ステップ203で実行したマッチング処理の結果に応じて自車位置の更新を行う。前記自車位置の情報としては、前述した緯度、経度を表すパラメータでも良いし、エリア情報、例えば分岐路から自車位置までの距離を表すパラメータでも良い。
【0037】
以上説明したように、自車位置検出手段101を用いて、地図情報に応じて自車位置の検出または推定を行うことが可能となる。
【0038】
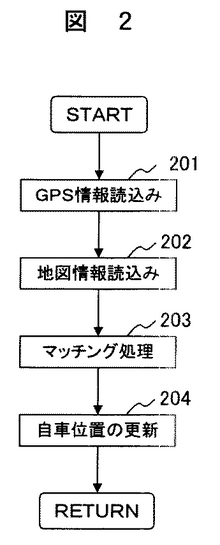
次に、走行車線認識手段102の処理内容について説明する。図3は、走行車線認識手段102の処理内容を示すフローチャートである。ここでは、走行車線を表すパラメータとしてLANEという変数を設けており、LANEzは1周期前に演算された変数LANEの値(前回値)である。
【0039】
ステップ301において、カメラ2によって検出された自車前方の走行環境(道路の白線、周囲の風景等)を示す画像情報を読込み、ステップ302において、ステアリング系に取付けられた操舵角センサから自車の操舵角情報を読込む。
【0040】
ステップ303において、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、自車が走行車線の変更(以下、レーンチェンジと称する)を実行したか否かを判定する。レーンチェンジを実行したと判定された場合にはステップ304に進み、レーンチェンジを実行していないと判定された場合にはステップ301に戻る。
【0041】
ステップ304において、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、右折、左折などにより走行経路が変化したか否かを判定する。走行経路が変化したと判定された場合にはステップ306に進み、ステップ306において変数LANEのクリア処理(=0)を行って処理を終了する。走行経路が変化していないと判定された場合には、ステップ305に進む。
【0042】
ステップ305において、車線変更の方向(右/左)を判定するため、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、右車線に変更したか否かの判定を行う。右車線に変更したと判定された場合には、ステップ307において、変数LANEのインクリメント処理(LANE=LANEz+1)を行って処理を終了する。右車線に変更していない(=左車線に変更)と判定された場合には、ステップ308において、変数LANEのデクリメント処理(LANE=LANEz−1)を行って処理を終了する。
【0043】
以上説明したように、走行車線認識手段102を用いて、カメラ2により検出した画像情報や、図示しないステアリングの操舵角の情報に応じて自車の走行車線を認識することが可能となる。
【0044】
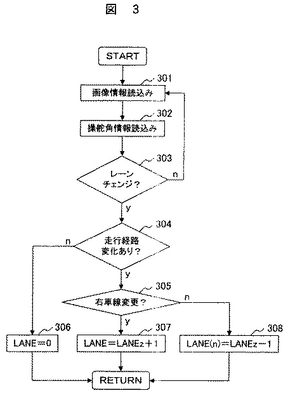
次に、走行車線認識手段102により認識された自車の走行車線を利用して分岐路を判定する方法について説明する。本発明の実施例では走行経路判定手段103により分岐路を判定する。
【0045】
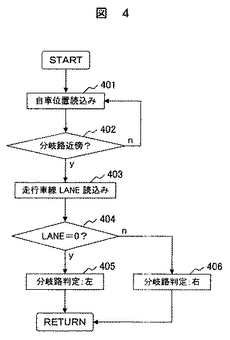
図4は、走行経路判定手段103の処理内容を示すフローチャートである。ステップ401において、自車位置検出手段101にて検出または推定された自車位置の情報を読み込む。
【0046】
次に、ステップ402において、ステップ401にて読込まれた自車位置の情報から、自車が分岐路の近傍に進入したか否かの判定を行い、分岐路近傍に進入したと判定された場合にはステップ403に進み、分岐路近傍に進入していないと判定された場合にはステップ401に戻る。
【0047】
ステップ403において、走行車線認識手段102にて演算された走行車線LANEを読込み、ステップ404において、LANEの値に応じて分岐路における自車の走行経路を判定する。ここでは、LANE=0のときを左車線、LANE=1のときを右車線と仮定して説明する。ステップ404において、LANE=0と判定された場合には、ステップ405に進み、ステップ405において分岐路の左車線を走行中と判断して処理を終了する。また、ステップ404において、LAN≠0と判定された場合には、ステップ406に進み、ステップ406において分岐路の右車線を走行中と判断して処理を終了する。
【0048】
以上説明したように、走行経路判定手段103を用いて、自車位置検出手段101により検出または推定された自車位置、走行車線認識手段102により認識された自車の走行車線の情報を利用して分岐路を判定することが可能となる。
【0049】
次に、図1から図4に示す本発明の実施形態による効果について、図5と図6を用いて説明する。
【0050】
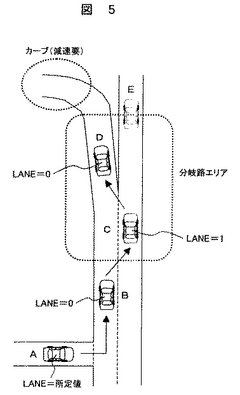
図5は、走行車線の情報から分岐路を判断する場合の走行概略図である。まず、図のA点で、自車が所定の走行車線(LANE=所定値)を走行しており、前方の交差点で左折して左車線に進入したと仮定する。左折直後のB点では、走行車線認識手段102により左車線を走行中(LANE=0)と認識される。その後、レーンチェンジを行い、自車が右車線に進入すると、走行車線認識手段102により走行車線LANEがインクリメントされて右車線を走行中(LANE=1)と認識される。このとき、図に示す分岐路近傍のエリアに自車が進入していたとすると、走行車線LANEの値が1であるので、走行経路判定手段103により走行経路が分岐路の右と判断され、自車前方の状況は直線路と判定される。さらに、分岐路の直前でレーンチェンジを行い、自車が左車線に進入して分岐路の左側を走行したとすると、走行車線認識手段102により走行車線LANEがデクリメントされて左車線を走行中(LANE=0)と認識される。このとき、走行車線LANEの値が0であるので、走行経路判定手段103により走行経路が分岐路の左と判断され、自車前方の状況はカーブと判定される。したがって、速やかに前方のカーブ形状(曲率半径等)に応じた目標速度が設定されるので、乗員に恐怖感や違和感を与えないような速度の自動調整が可能となる。
【0051】
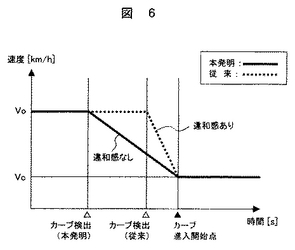
図6は、カーブ形状に応じて速度調整を行った場合のタイムチャートである。従来ナビゲーションシステムを用いた走行経路の判定では、マップマッチングの精度等の影響により、このような緩やかな分岐路で走行経路が図5のE点付近と誤判断され、カーブ進入開始点の直前で自車の走行経路が分岐路の左側にシフトするという場合がある。したがって、図6の点線で示すように、カーブ進入開始点の直前で前方のカーブを検出するため、速度Voから速度Vcまで急激な減速を行う必要が生じ、乗員に違和感を与える。これに対し、本発明では自車の走行車線の情報を用いて確実な分岐路の判断が可能となり、速やかに前方のカーブを検出できるので、速度Voから速度Vcまでの減速パターンの設定自由度が増加して違和感の無い速度調整が可能となる。
【0052】
また、図5のC点でイグニッションスイッチが遮断されたとき、走行車線の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに走行車線の情報が初期化(例えば、LANE=0)されてしまうため、分岐路を誤判定するケースが存在する。したがって、イグニッションスイッチが遮断されたときには、認識された走行車線の履歴をEEPROM(Electoronically Erasable and Programmable Read Only Memory)やバックアップRAM等のメモリに記憶する。そして、イグニッションスイッチが接続されたときにはこれらのメモリに記憶された走行車線の履歴に応じて自車の走行車線を認識することが望ましい。このように認識された走行車線の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。
【0053】
次に、図7から図11を用いて、自車近傍の道路勾配を認識する道路勾配認識手段を備えた自動車の走行制御システムについて説明する。
【0054】
図7は本発明の一実施形態に係る走行制御システムの構成図である。動力伝達系およびカメラ、GPS、アンテナ等の主要構成については図1に示した構成と同様であるため、その説明を省略する。
【0055】
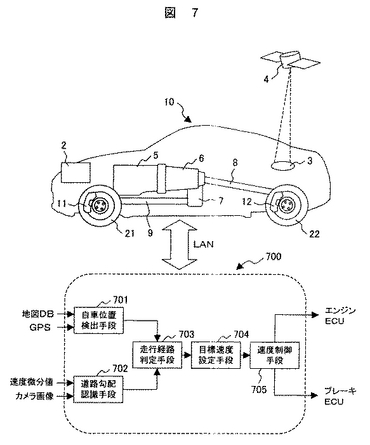
次に、走行制御装置700の構成および処理について説明する。走行制御装置700は、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703、目標速度設定手段704、速度制御手段705から構成される。以下に示す処理の内容は、走行制御装置700の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0056】
自車位置検出手段701は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。なお、自車位置検出手段701については、図2に示した自車位置検出手段101の処理内容と同様であるため、その説明を省略する。
【0057】
道路勾配認識手段702は、カメラ2により検出した画像情報や、自車の速度微分値に応じて自車近傍の道路勾配を認識する。前記速度微分値は、図示しない加速度センサの信号や、従来より用いられている車速センサの信号を用いて演算される。
【0058】
走行経路判定手段703は、自車位置検出手段701により検出または推定された自車位置と道路勾配認識手段702により認識された道路勾配に応じて走行経路を判定する。
【0059】
目標速度設定手段704は、走行経路判定手段704により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0060】
速度制御手段705は、目標速度設定手段704により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段705により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0061】
本発明の実施例においては、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703、目標速度設定手段704、速度制御手段705の処理を1つのECU内で実現している例を示しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0062】
エンジンECUは、速度制御手段705から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段705から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0063】
以上説明したように、走行制御装置700を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0064】
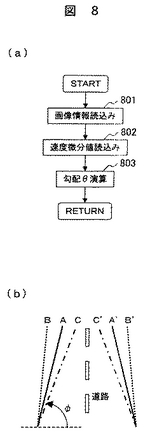
次に、道路勾配認識手段702の処理内容について説明する。図8(a)は、道路勾配認識手段702の処理内容を示すフローチャートである。ステップ801において、カメラ2によって検出された自車前方の走行環境(道路の白線、周囲の風景等)を示す画像情報を読込み、ステップ802において、エンジンECUやブレーキECU、各種センサ等の車両状態を表すパラメータを用いて自車の速度微分値を読込む。
【0065】
ステップ803において、ステップ801にて読込まれた画像情報や、ステップ802で読込まれた速度微分値に応じて自車近傍の道路勾配θを演算する。
【0066】
ここで、画像情報を用いて自車近傍の道路勾配θを求める方法について図8(b)を用いて説明する。図8(b)において、道路端の白線と水平線の成す角度をφとする。図の実線A(またはA')で示すように、自車前方の道路が平坦路の場合の角度をφoとし、図の点線B(またはB')で示すように、自車前方の道路が上り勾配の場合の角度をφuとする。また、図の一点鎖線C(またはC')で示すように、自車前方の道路が下り勾配の場合の角度をφdとすると、3つの角度はφu>φo>φdという関係がある。したがって、道路形状(例えば白線)と水平線の成す角度φを用いて自車前方の道路勾配θを関数fにより演算できる。この関数fは、カメラの取付け位置等に応じて決定される。
【0067】
次に、自車の速度微分値を用いて自車近傍の道路勾配θを求める方法について説明する。車両重量をM、車両加速度をα、車両駆動力をFv、路面との摩擦や空気に起因する走行抵抗をRa、勾配抵抗をRb(上り勾配:Rb>0、下り勾配:Rb<0)とすると、車両の運動方程式は(1)式で表される。
M・α=Fv−Ra−Rb (1)
車両駆動力Fv、走行抵抗Ra、勾配抵抗Rbは、関数g、v、zを用いて(2)〜(4)式で表される。
Fv=g(TEG) (2)
Ra=v(VSP) (3)
Rb=z(θ) (4)
ここで、TEGはエンジン5のトルク、VSPは車両速度である。(1)〜(3)式を整理することにより(5)式を得る。
z(θ)=g(TEG)−v(VSP)−M・α (5)
関数gは変速機6のギア比やタイヤ半径、動力伝達系の効率等によって定まり、関数vは路面との摩擦係数や空気抵抗係数によって定まる。また、関数zの簡単な例を(6)式に示す。
z(θ)=M・sinθ (6)
(5)、(6)式からわかるように、車両の状態パラメータとして、エンジン5のトルクTEG、車両速度VSP、車両加速度αを用いて道路勾配θを算出することが可能となる。車両加速度αは、図示しない速度微分値検出手段により検出される。例えば、加速度センサから検出された信号に応じて車両加速度を演算しても良いし、従来用いられている回転センサの信号に応じて演算される車両速度VSPの擬似微分値を用いても良い。
【0068】
さらに、この道路勾配θを用いて自車の高度Hも求めることができる。例えば、車両速度VSPは単位時間当りの走行距離Lに相当する。したがって、高度の基準値Hoを用いて高度Hは(7)式を用いて算出できる。
H=Ho+∫(L・sinθ)dt (7)
以上説明したように、カメラ2から検出された画像情報や、図示しないエンジンECU、ブレーキECUおよび各種センサ等から受信した車両の状態パラメータを用いて、道路勾配認識手段702により自車近傍の道路勾配を求めることが可能となる。また、演算した道路勾配に応じて自車の高度も求めることが可能になるため、立体交差や並行道路の検出精度が大幅に向上する。
【0069】
次に、道路勾配認識手段702により認識された自車近傍の道路勾配を利用して立体交差を判定する方法について説明する。本発明の実施例では走行経路判定手段703により立体交差を判定する。
【0070】
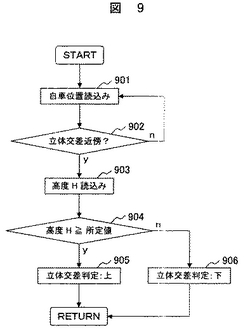
図9は、走行経路判定手段703の処理内容を示すフローチャートである。ステップ901において、自車位置検出手段701にて検出または推定された自車位置の情報を読み込む。
【0071】
次に、ステップ902において、ステップ901にて読込まれた自車位置の情報から、自車が立体交差の近傍に進入したか否かの判定を行い、立体交差近傍に進入したと判定された場合にはステップ903に進み、立体交差近傍に進入していないと判定された場合にはステップ901に戻る。
【0072】
ステップ903において、道路勾配認識手段702にて演算された高度Hを読込み、ステップ904において、Hの値に応じて立体交差における自車の走行経路を判定する。ステップ904において、H≧所定値と判定された場合には、ステップ905に進み、ステップ905において立体交差の上側を走行中と判断して処理を終了する。ステップ904において、H<所定値と判定された場合には、ステップ906に進み、ステップ906において立体交差の下側を走行中と判断して処理を終了する。
【0073】
以上説明したように、道路勾配認識手段702により認識された自車近傍の道路勾配に応じて推定される自車の高度を用いて、走行経路判定手段703により立体交差を判定することが可能となる。
【0074】
次に、図6から図9に示す本発明の実施形態による効果について、図10と図11を用いて説明する。
【0075】
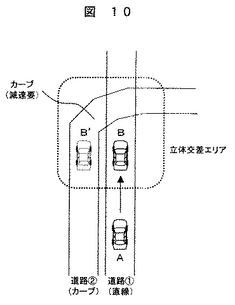
図10は、走行経路の勾配情報から立体交差や並行道路を判断する場合の走行概略図である。図10において、道路(1)は直線路であり、道路(1)に並行する道路(2)の前方にはカーブが存在する。また、道路(1)は道路(2)のカーブ出口付近で道路(2)と立体交差しており、道路(1)は道路(2)の上側を交差している。いま、道路(1)(直線)のA点を自車が走行しており、立体交差エリア近傍のB点に自車が進入した場合を想定する。
【0076】
従来のナビゲーションにより走行経路の検出を行った場合には、マップマッチングの精度等により、道路(1)と並行する道路(2)のB'(カーブ)を自車の走行経路として誤検出する可能性がある。このような誤検出が発生した場合には、前方のカーブを認識してしまい、図の直線路を走行しているにも関わらずに自動的に減速を行う現象が発生して乗員に違和感を与える。
【0077】
本発明を用いた場合には、前述の走行環境認識手段により、図のB点付近で自車近傍の道路勾配を求めることが可能となる。さらに、図9に示すような走行経路判定手段により、自車近傍の道路勾配、それに応じて算出した自車の高度情報から、立体交差の上側、下側を判定することが可能となり、図のB'点を誤検出すること無く走行経路である図のB点を検出することができる。
【0078】
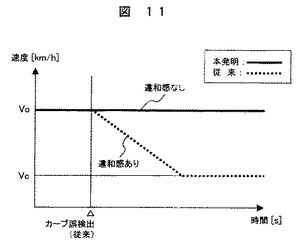
図11は、図10で示す立体交差を走行中に速度調整を行った場合のタイムチャートである。
【0079】
前述のとおり、従来ナビゲーションシステムを用いた走行経路の検出では、図8に示すような立体交差において、走行経路が図10のB'点付近と誤判断され、道路(1)の直線路を走行しているにも関わらずに自動的に減速を行ってしまうという場合がある。したがって、図11に示すように、立体交差進入開始点の直前で下側の道路(2)を誤って認識してしまい、速度Voから速度Vcまでの減速が発生し、乗員に違和感を与える。
【0080】
これに対し、本発明では、自車近傍の道路勾配、それに応じて算出した自車の高度情報を用いて確実な立体交差の判断が可能となり、誤った減速を防止して速度Voを継続して維持することができ、違和感の無い速度調整が可能となる。
【0081】
また、図10のB’点でイグニッションスイッチが遮断されたとき、道路勾配の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに道路勾配の情報が初期化されてしまうため、立体交差を誤判定するケースが存在する。
【0082】
したがって、イグニッションスイッチが遮断されたときには、認識された道路勾配の履歴をEEPROMやバックアップRAM等のメモリに記憶しておく。そして、イグニッションスイッチが接続されたときにはメモリに記憶された道路勾配の履歴に応じて、自車近傍の道路勾配を認識することが望ましい。このように、認識された道路勾配の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。
【0083】
次に、自車前方の料金収受装置の種類を認識して速度の自動調整をスムーズに行う自動車の走行制御システムについて、図12から図16を用いて説明する。
【0084】
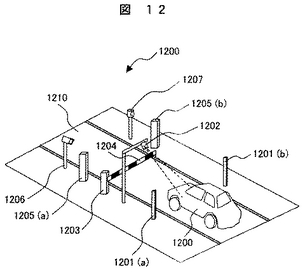
図12は、自動料金収受システム(ETC:Electronic Toll Collection Systems)の概略図である。
【0085】
自車1200がETCの設置された道路1210を走行してETCに近づくと、センサ1201により自車1200が感知されて、路側無線装置1202と自車に搭載された図示しない車載機が通信を開始する。この通信により、ICカード等で前記車載機に記憶されている車載情報が認識されると、ゲート1203に取り付けられた遮断機1204が開く。ゲート1203の通過可否を自車1200に報知する路側表示装置1207が制御されて、自車1200はゲート1203を通過可能な状態となる。自車1200がゲート1203を通過し、車両検知機1205と車線監視装置1206により自車1200がゲート1203を通過したことが確認されると、ゲート1203が制御されて遮断機1204が閉じる。料金の収受は路側無線装置1202と前記車載機によって通信された車載情報に基づいて、クレジットカード等により行われる。
【0086】
一方、上述した自動料金収受システムにおいては、通信の遅延やゲートの応答遅れによる事故を防止するため、通過可能な速度に制限が設けられている。例えば、高速道路に設置されているETCの場合、現状20km/hの制限速度が規定されている。
【0087】
これに対し、従来の手動による料金所においては、料金所に配備された係員と運転者の間で手動により料金の収受が行われるため、料金所を通過する際には自車の速度を必然的に0km/h(停止)とする必要がある。
【0088】
現在では、自動料金収受システム(ETC)は普及段階にあるため、従来の手動により料金の収受を行う料金所にETCシステムが混在しているのが実状である。したがって、速度の自動調整をスムーズに行うためには、料金所の種類を認識してETC装着車と一般車(ETC非装着車)で異なる目標速度を設定する必要がある。
【0089】
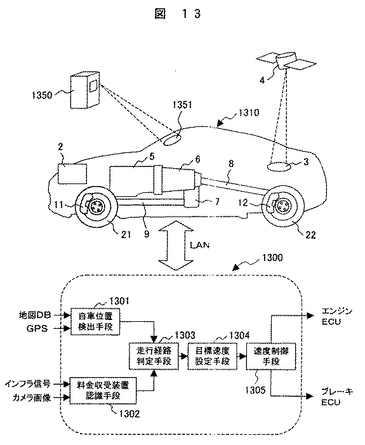
図13は本発明の一実施形態による走行制御システムの構成図である。車体1310には、インフラストラクチャである料金所1350と通信を行う車載機1351が搭載されており、車載機1351とLAN(Local Area Network)により通信を行う走行制御装置1300が搭載されている。なお、動力伝達系およびカメラ、GPS、アンテナ等の主要構成については図1に示した構成と同様であるため、その説明を省略する。
【0090】
次に、走行制御装置1300の構成および処理について説明する。走行制御装置1300は、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303、目標速度設定手段1304、速度制御手段1305から構成される。以下に示す処理の内容は、走行制御装置1300の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0091】
自車位置検出手段1301は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。なお、自車位置検出手段1301については、図2に示した自車位置検出手段101の処理内容と同様であるため、その説明を省略する。
【0092】
料金収受装置認識手段1302は、カメラ2により検出した画像情報や、インフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識する。インフラストラクチャからの信号は、車載機1351等を用いて受信され、LAN(Local Area Network)を用いて走行制御装置1300等のECU(Electric Control Unit)に送信される。
【0093】
走行経路判定手段1303は、自車位置検出手段1301により検出または推定された自車位置と料金収受装置認識手段1302により認識された料金収受装置の種類に応じて走行経路を判定する。
【0094】
目標速度設定手段1304は、走行経路判定手段1304により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0095】
速度制御手段1305は、目標速度設定手段1304により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段1305により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0096】
本実施例においては、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303、目標速度設定手段1304、速度制御手段1305の処理を1つのECU内で実現しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0097】
エンジンECUは、速度制御手段1305から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段1305から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0098】
以上説明したように、走行制御装置1300を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0099】
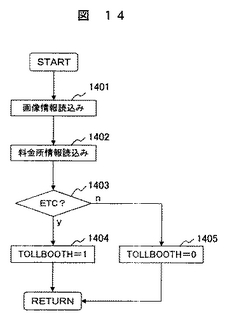
次に、料金収受装置認識手段1302の処理内容について説明する。図14は、料金収受装置認識手段1302の処理内容を示すフローチャートである。ここでは、料金所の種類を表すパラメータとしてTOLLBOOTHという変数を設けている。
【0100】
ステップ1401において、カメラ2によって検出された自車前方の走行環境(料金所1350の種別を表示する看板等)を示す画像情報を読込む。ステップ1402において、図12で示した路側無線装置1202から車載機1351に送信された料金所情報を読込む。
【0101】
ステップ1403において、ステップ1401にて読込まれた画像情報や、ステップ1402にて読込まれた料金所情報から、自車前方の料金所がETCであるか否かを判定する。ETCであると判定された場合にはステップ1404に進み、TOLLBOOTHに1を代入して処理を終了する。ステップ1403において、ETCでないと判定された場合にはステップ1405に進み、TOLLBOOTHに0を代入して処理を終了する。
【0102】
以上説明したように、料金収受装置認識手段1302を用いて、カメラ2により検出した画像情報や、料金所1100から車載機1101に送信された料金所情報に応じて料金所の種類を認識することが可能となる。
【0103】
次に、自車位置検出手段1301により検出または推定された自車位置と、料金収受装置認識手段1302により認識された料金所の種類に応じて自車の走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定する方法について説明する。本発明の実施例では走行経路判定手段1303ないし目標速度設定手段1304によりこれらの処理を行う。
【0104】
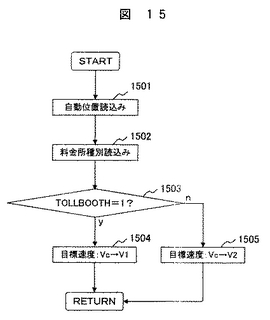
図15は、自車の走行経路を判定し、判定された走行経路に応じて目標速度設定する手段の処理内容を示すフローチャートである。ステップ1501において、自車位置検出手段1301により検出または推定された自車位置を読込む。ステップ1502において、料金収受装置認識手段1302により認識された料金所の種類(変数TOLLBOOTH)を読込む。
【0105】
ステップ1503において、ステップ1502において読込まれた変数TOLLBOOTHの値が1であるか否かの判定を行う。変数TOOLBOOTH=1(ETC)と判定された場合にはステップ1504に進み、目標速度の最終値をETCで規定されている制限速度V1(例えば20km/h)に設定する。そして、ステップ1501において読込まれた走行経路に応じて現在の目標速度VcからV1まで徐々に目標速度を低下させる処理を行う。ステップ1503において、変数TOOLBOOTH=0(ETC以外)と判定された場合にはステップ1505に進み、手動で料金の収受を行うことを想定して目標速度の最終値を制限速度V2(例えば0km/h)に設定する。そして、ステップ1501において読込まれた自車位置に応じて現在の目標速度VcからV2まで徐々に目標速度を低下させる処理を行う。
【0106】
以上説明したように、自車の走行経路を判定し、判定された走行経路に応じて目標速度を設定することにより速度の自動調整を行うことが可能となる。
【0107】
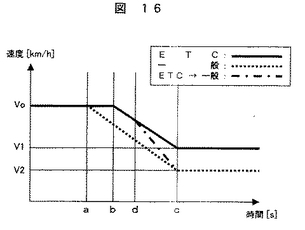
図16は、料金所の種類を認識して速度調整を行った場合のタイムチャートである。図のa点は走行経路検出手段により自車が料金所の付近に近づいたことが識別される時刻を示しており、図のc点は料金収受地点のごく近傍に自車が到達する時刻である。
【0108】
図のa点で自車が料金所の付近に近づいたことが識別されると、走行環境認識手段により料金所の種類が認識される。このとき、ETC車載機を搭載していない車の場合は、インフラストラクチャである路側無線装置と通信が行われない。このために、料金所の種類を示すパラメータTOOLBOOTH=0(ETC以外)となるので、手動により料金収受を行う料金所(一般の料金所)であると認識される。したがって、図のc点で自車の速度がV2(例えば0km/h)となるように減速制御が行われる。また、ETC車載機を搭載している車が一般の料金所に進入した場合は、カメラ等により検出された画像情報から料金所の種類を認識して同様の制御を行う。
【0109】
一方、ETC車載機を搭載している車がETC料金所に進入した場合は、路側無線装置と通信が行われて料金所の種類を示すパラメータTOOLBOOTH=1(ETC)となるのでETC料金所であると認識される。したがって、図のc点で自車の速度がV1(例えば20km/h)となるように減速制御が行われる。このとき、一般の料金所の場合と比較して現在の目標速度VcとV1の差が小さくなるので、車両の減速度(速度変化)を同等にして両者の違和感を低減するためには、減速開始タイミングを図のa点から所定時間経過後のb点にすることが望ましい。
【0110】
以上説明したように、複数の種類の料金所が混在する領域において、走行環境認識手段により料金所の種類を認識し、料金所の種類に応じて目標速度の設定を行うことにより、目標速度の設定を変更することが可能となる。これにより、速度の自動調整を行う領域が拡大して運転者の負荷を軽減できる。
【0111】
さらに、図のd点でETC料金所を認識中に一般料金所に進入した場合などは、料金収受地点(図のc点)で自車の速度をV2にする必要があるため、図の一点鎖線で示すように、図のd点から車両の減速度(速度変化)が変化するように目標速度を設定することが望ましい。このような場合には、警報装置や表示装置を用いて運転者への報知をすることで違和感の無い減速制御が行える。
【0112】
また、アクセルペダルやブレーキペダルといった操作系のアクチュエータを制御して運転者への報知を実現しても良い。例えば、上述のETC料金所を認識中に一般料金所に進入した場合などは、アクセルペダル反力を大きく設定し、運転者の操作負荷を増大させて減速度の変化を報知することができる。
【0113】
また、料金収受装置の種類をETCと認識した後でイグニッションスイッチが遮断されたとき、料金収受装置の種類の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに料金収受装置の種類の情報が初期化(例えば、TOOLBOOTH=0)されてしまう。このため、料金収受装置の種類を誤判定するケースが存在する。したがって、イグニッションスイッチが遮断されたときには、認識された自車前方の料金収受装置の種類の履歴をEEPROMやバックアップRAM等のメモリに記憶する。そして、イグニッションスイッチが接続されたときにはメモリに記憶された料金収受装置の種類の履歴に応じて、自車前方の料金収受装置の種類を認識することが望ましい。
【0114】
このように、認識された料金収受装置の種類の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。さらに、走行経路の誤判定による目標速度の設定ミスを回避することができ、安全な走行を支援することができる。
【0115】
本実施形態においては、車両が減速制御を行う場合について記載したが、加速制御を行う場合についても同様の効果が得られる。例えば、カーブ路の前方が直線路となっている場合には、カーブ進入時に一旦減速制御を行い、カーブ出口付近から徐々に速度を増加させて直線路に応じた速度まで増加させる必要がある。このような場合においても本発明が有効であることは言うまでもない。
【0116】
本発明の実施形態では、駆動力源としてエンジンを備えた自動車について説明したが、駆動力源としてモータを備えた電気自動車、駆動力源としてエンジンとモータの両方を備えたハイブリッド自動車を対象としても良い。また、本発明では前輪、後輪ともに駆動する4WD車を実施例としているが、前輪駆動、あるいは後輪駆動の自動車も本発明の対象となる。
【図面の簡単な説明】
【0117】
【図1】本発明の一実施形態に係る走行制御システムの構成図。
【図2】自車位置検出手段の処理内容を示す制御フローチャート。
【図3】走行車線認識手段の処理内容を示す制御フローチャート。
【図4】走行経路判定手段の処理内容を示す制御フローチャート。
【図5】走行車線の情報から分岐路を判断する場合の走行概略図。
【図6】カーブ形状に応じて速度調整を行った場合のタイムチャート。
【図7】本発明の他の実施形態に係る走行制御システムの構成図。
【図8】走行環境認識手段の処理内容を示す制御フローチャート。
【図9】走行経路判定手段の他の処理内容を示す制御フローチャート。
【図10】走行経路の勾配情報から立体交差や並行道路を判断する場合の走行概略図。
【図11】立体交差を走行中に速度調整を行った場合のタイムチャート。
【図12】自動料金収受システム(ETC)の概略図。
【図13】本発明の更に他の実施形態に係る走行制御システムの構成図。
【図14】料金収受装置認識手段の処理内容を示す制御フローチャート。
【図15】走行経路を判定して目標速度を設定する手段の処理内容を示すフローチャート。
【図16】料金収受装置の種類を認識して速度調整を行った場合のタイムチャート。
【符号の説明】
【0118】
2…カメラ、3…GPSアンテナ、4…GPS衛星、5…エンジン、6…変速機、7…動力分割機構、8,9…プロペラシャフト、10…車体、11,12…ブレーキ、21,22…タイヤ、100…走行制御装置、101…自車位置検出手段、102…走行車線認識手段、103…走行経路判定手段、104…目標速度設定手段、105…速度制御手段。
【技術分野】
【0001】
本発明は、車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法に係り、とくに、自車前方の走行環境を認識して自車の速度を制御する自動車の走行制御システム、自動車の走行制御装置及び方法に関する。
【背景技術】
【0002】
従来のナビゲーションシステムにおいては、GPS(Global Positioning System:衛星航法システム)から受信した自車位置の情報とDVD−ROMやハードディスクに記憶された地図DB(Data Base:データベース)に基づいて、走行経路の検出を行っている。例えば、特許文献1には、走行経路の検出を行うナビゲーションシステムの持つ地図情報からカーブ路を抽出し、そのカーブ路の道路特性に応じた目標速度を設定して、カーブ路に進入する前に速度を低下させて安全な走行を実現するシステムが記載されている。
【0003】
【特許文献1】特開平04−236699号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のシステムを実現するためには、GPSならびに地図DBの高精度化が重要となるが、このGPSを使用するものは、地形によってはマルチパスが起こることや衛星が捕捉できないことで、精度が著しく低下することがある。そのために、ジャイロセンサ及び車速センサによって推定する、いわゆる自律航法による自車位置の補正を行う方法があるが、この場合でも蛇行やタイヤの空気圧変化やスリップ等によって地図DBを用いて特定した自車位置に誤差が発生する。
【0005】
このため、従来のナビゲーションシステムでは、自車がカーブや交差点等で操舵を行ったことをジャイロセンサ等で感知することによって、自車が保有するナビゲーション地図上の道路に修正するマップマッチング機能を行うものがある。ところが、この方法では、自車の地図上の位置が、カーブや交差点等で実際の操舵をしてから補正されるため、分岐路や立体交差、並行道路を認識できずに走行経路を誤検出する場合が存在する。例えば、分岐後の経路の一方が直線路、もう一方がカーブ路であった場合に、前方にカーブが存在するにもかかわらず、分岐路の誤判断によりカーブ路を検出できずに減速タイミングが遅れ、運転者に違和感を与える可能性がある。また、立体交差や並行道路においても同様の現象が発生する。
【0006】
また、速度の自動調整を行う際の課題として、料金収受装置(以下、料金所と称する)付近の対応が考えられる。近年では、ETC(Electronic Toll Collection Systems:自動料金収受システム)の普及がめざましく、従来の手動による料金所とETCが混在している場所が数多く見受けられる。ETCは高速道路などのゲート付近の交通渋滞緩和を目的として開発されたシステムであり、料金所を通過する際にゲートと車載機の間で通信することにより自動的に料金の支払いを行う。したがって、ゲートを通過する所要時間の大幅な短縮が期待される。しかし、さらなる利便化を目的として料金所付近で速度の自動調整を行う場合には、ETC装着車と手動による料金所を利用する車(以下、一般車と称する)とでゲート通過時の目標速度が異なるため、各車が利用する料金所の種類に応じて目標速度の設定を行う必要がある。例えば、ゲート通過時におけるETC装着車の推奨速度は約20km/hであり、一般車は料金を手動で支払うために0km/hに設定する必要がある。
【0007】
本発明の目的は、従来技術の問題点に鑑み、速度の自動調整をスムーズに行うことにより違和感の無い運転支援を可能にする点にある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0009】
好ましくは、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする。
【0010】
好ましくは、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする。
【0011】
また、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0012】
好ましくは、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする。
【0013】
好ましくは、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする。
【0014】
さらに、本発明に係る自動車の走行制御システムの1つは、地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段とを有する。
【0015】
好ましくは、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする。
【0016】
好ましくは、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする。
【発明の効果】
【0017】
本発明によれば、走行経路を検出して目標速度の設定を行い、設定された目標速度に応じて自車の速度を制御する自動車において、自車の走行車線、走行経路の勾配情報を認識することにより周囲の状況に応じた速度の自動調整をスムーズに行うことが可能となる。
【0018】
また、本発明により、走行経路の誤検出によって生じる乗員の違和感を低減できる。
【0019】
また、複数の種類の料金所が混在する場所において、料金所の情報を認識することにより目標速度の設定を変更することが可能となり、速度の自動調整を行う領域が拡大して運転者の負荷を軽減できる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の実施形態について図面を用いて詳細に説明する。最初に、図1から図6を用いて、自車の走行車線を認識する走行環境認識手段を備えた自動車の走行制御システムについて説明する。
【0021】
図1は本発明の一実施形態に係る走行制御システムの構成図である。車体10には、エンジン5および変速機6が搭載され、エンジン5で発生したトルクは変速機6、プロペラシャフト8を介してタイヤ22に伝達される。また、変速機6から出力するトルクは動力分割機構7によりプロペラシャフト9を介してタイヤ21、22に伝達される。上記エンジン5のトルクは、図示しないエンジンECU(Electric Control Unit)の制御信号にしたがい調整される。
【0022】
タイヤ21、22にはそれぞれ、ブースター等のアクチュエータにより制御されるブレーキ11、12が取付けられ、運転者のブレーキ操作または図示しないブレーキECUの制御信号により押付け力を発生させてタイヤ21、22の回転を減速することにより車体10の制動力を調整する。
【0023】
また、車体10には、画像情報を取得して外界状況を検出するカメラ2や、GPS4を利用して自車位置に関する情報(おもに緯度、経度)を受信するアンテナ3が搭載されている。これらのセンサおよびエンジンECU、ブレーキECU等にはLAN(Local Area Network)により通信を行う走行制御装置100が搭載されている。
【0024】
次に、走行制御装置100の構成および処理について説明する。走行制御装置100は、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103、目標速度設定手段104、速度制御手段105から構成され、以下に示す処理の内容は、走行制御装置100の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0025】
自車位置検出手段101は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。
【0026】
走行車線認識手段102は、カメラ2により検出した画像情報や、図示しないステアリングの操舵角に応じて自車の走行車線を認識する。前記操舵角は操舵角検出手段である操舵角センサやステアリングのアクチュエータとして使用されるモータの回転角度などにより検出される。
【0027】
走行経路判定手段103は、自車位置検出手段101により検出または推定された自車位置と走行車線認識手段102により認識された走行車線に応じて走行経路を判定する。
【0028】
目標速度設定手段104は、走行経路判定手段104により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0029】
速度制御手段105は、目標速度設定手段104により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段105により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0030】
本発明の実施例は、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103、目標速度設定手段104、速度制御手段105の処理を1つのECU内で実現している例を示しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段101、走行車線認識手段102、走行経路判定手段103の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0031】
エンジンECUは、速度制御手段105から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段105から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0032】
以上説明したように、走行制御装置100を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0033】
次に、自車位置検出手段101の処理内容について説明する。図2は、自車位置検出手段101の処理内容を示すフローチャートである。
【0034】
まず、ステップ201において、GPS4からアンテナ3により受信した自車位置の情報(緯度、経度等)を読込み、ステップ202において、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報を読込む。
【0035】
次に、ステップ203において、ステップ201にて読み込まれた自車位置の情報を用いて、ステップ202にて読み込まれた地図DBに自車位置をマッチングする処理を行う。マッチング処理の一例としては、地図上にメッシュを作成し、自車位置(緯度、経度)と地図上のメッシュ格子点の位置を比較して、自車位置の最も近傍にあるメッシュ格子点に自車位置をマッチングするマップ・マッチングが一般的である。
【0036】
ステップ204において、ステップ203で実行したマッチング処理の結果に応じて自車位置の更新を行う。前記自車位置の情報としては、前述した緯度、経度を表すパラメータでも良いし、エリア情報、例えば分岐路から自車位置までの距離を表すパラメータでも良い。
【0037】
以上説明したように、自車位置検出手段101を用いて、地図情報に応じて自車位置の検出または推定を行うことが可能となる。
【0038】
次に、走行車線認識手段102の処理内容について説明する。図3は、走行車線認識手段102の処理内容を示すフローチャートである。ここでは、走行車線を表すパラメータとしてLANEという変数を設けており、LANEzは1周期前に演算された変数LANEの値(前回値)である。
【0039】
ステップ301において、カメラ2によって検出された自車前方の走行環境(道路の白線、周囲の風景等)を示す画像情報を読込み、ステップ302において、ステアリング系に取付けられた操舵角センサから自車の操舵角情報を読込む。
【0040】
ステップ303において、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、自車が走行車線の変更(以下、レーンチェンジと称する)を実行したか否かを判定する。レーンチェンジを実行したと判定された場合にはステップ304に進み、レーンチェンジを実行していないと判定された場合にはステップ301に戻る。
【0041】
ステップ304において、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、右折、左折などにより走行経路が変化したか否かを判定する。走行経路が変化したと判定された場合にはステップ306に進み、ステップ306において変数LANEのクリア処理(=0)を行って処理を終了する。走行経路が変化していないと判定された場合には、ステップ305に進む。
【0042】
ステップ305において、車線変更の方向(右/左)を判定するため、ステップ301にて読込まれた画像情報や、ステップ302にて読込まれた操舵角情報から、右車線に変更したか否かの判定を行う。右車線に変更したと判定された場合には、ステップ307において、変数LANEのインクリメント処理(LANE=LANEz+1)を行って処理を終了する。右車線に変更していない(=左車線に変更)と判定された場合には、ステップ308において、変数LANEのデクリメント処理(LANE=LANEz−1)を行って処理を終了する。
【0043】
以上説明したように、走行車線認識手段102を用いて、カメラ2により検出した画像情報や、図示しないステアリングの操舵角の情報に応じて自車の走行車線を認識することが可能となる。
【0044】
次に、走行車線認識手段102により認識された自車の走行車線を利用して分岐路を判定する方法について説明する。本発明の実施例では走行経路判定手段103により分岐路を判定する。
【0045】
図4は、走行経路判定手段103の処理内容を示すフローチャートである。ステップ401において、自車位置検出手段101にて検出または推定された自車位置の情報を読み込む。
【0046】
次に、ステップ402において、ステップ401にて読込まれた自車位置の情報から、自車が分岐路の近傍に進入したか否かの判定を行い、分岐路近傍に進入したと判定された場合にはステップ403に進み、分岐路近傍に進入していないと判定された場合にはステップ401に戻る。
【0047】
ステップ403において、走行車線認識手段102にて演算された走行車線LANEを読込み、ステップ404において、LANEの値に応じて分岐路における自車の走行経路を判定する。ここでは、LANE=0のときを左車線、LANE=1のときを右車線と仮定して説明する。ステップ404において、LANE=0と判定された場合には、ステップ405に進み、ステップ405において分岐路の左車線を走行中と判断して処理を終了する。また、ステップ404において、LAN≠0と判定された場合には、ステップ406に進み、ステップ406において分岐路の右車線を走行中と判断して処理を終了する。
【0048】
以上説明したように、走行経路判定手段103を用いて、自車位置検出手段101により検出または推定された自車位置、走行車線認識手段102により認識された自車の走行車線の情報を利用して分岐路を判定することが可能となる。
【0049】
次に、図1から図4に示す本発明の実施形態による効果について、図5と図6を用いて説明する。
【0050】
図5は、走行車線の情報から分岐路を判断する場合の走行概略図である。まず、図のA点で、自車が所定の走行車線(LANE=所定値)を走行しており、前方の交差点で左折して左車線に進入したと仮定する。左折直後のB点では、走行車線認識手段102により左車線を走行中(LANE=0)と認識される。その後、レーンチェンジを行い、自車が右車線に進入すると、走行車線認識手段102により走行車線LANEがインクリメントされて右車線を走行中(LANE=1)と認識される。このとき、図に示す分岐路近傍のエリアに自車が進入していたとすると、走行車線LANEの値が1であるので、走行経路判定手段103により走行経路が分岐路の右と判断され、自車前方の状況は直線路と判定される。さらに、分岐路の直前でレーンチェンジを行い、自車が左車線に進入して分岐路の左側を走行したとすると、走行車線認識手段102により走行車線LANEがデクリメントされて左車線を走行中(LANE=0)と認識される。このとき、走行車線LANEの値が0であるので、走行経路判定手段103により走行経路が分岐路の左と判断され、自車前方の状況はカーブと判定される。したがって、速やかに前方のカーブ形状(曲率半径等)に応じた目標速度が設定されるので、乗員に恐怖感や違和感を与えないような速度の自動調整が可能となる。
【0051】
図6は、カーブ形状に応じて速度調整を行った場合のタイムチャートである。従来ナビゲーションシステムを用いた走行経路の判定では、マップマッチングの精度等の影響により、このような緩やかな分岐路で走行経路が図5のE点付近と誤判断され、カーブ進入開始点の直前で自車の走行経路が分岐路の左側にシフトするという場合がある。したがって、図6の点線で示すように、カーブ進入開始点の直前で前方のカーブを検出するため、速度Voから速度Vcまで急激な減速を行う必要が生じ、乗員に違和感を与える。これに対し、本発明では自車の走行車線の情報を用いて確実な分岐路の判断が可能となり、速やかに前方のカーブを検出できるので、速度Voから速度Vcまでの減速パターンの設定自由度が増加して違和感の無い速度調整が可能となる。
【0052】
また、図5のC点でイグニッションスイッチが遮断されたとき、走行車線の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに走行車線の情報が初期化(例えば、LANE=0)されてしまうため、分岐路を誤判定するケースが存在する。したがって、イグニッションスイッチが遮断されたときには、認識された走行車線の履歴をEEPROM(Electoronically Erasable and Programmable Read Only Memory)やバックアップRAM等のメモリに記憶する。そして、イグニッションスイッチが接続されたときにはこれらのメモリに記憶された走行車線の履歴に応じて自車の走行車線を認識することが望ましい。このように認識された走行車線の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。
【0053】
次に、図7から図11を用いて、自車近傍の道路勾配を認識する道路勾配認識手段を備えた自動車の走行制御システムについて説明する。
【0054】
図7は本発明の一実施形態に係る走行制御システムの構成図である。動力伝達系およびカメラ、GPS、アンテナ等の主要構成については図1に示した構成と同様であるため、その説明を省略する。
【0055】
次に、走行制御装置700の構成および処理について説明する。走行制御装置700は、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703、目標速度設定手段704、速度制御手段705から構成される。以下に示す処理の内容は、走行制御装置700の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0056】
自車位置検出手段701は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。なお、自車位置検出手段701については、図2に示した自車位置検出手段101の処理内容と同様であるため、その説明を省略する。
【0057】
道路勾配認識手段702は、カメラ2により検出した画像情報や、自車の速度微分値に応じて自車近傍の道路勾配を認識する。前記速度微分値は、図示しない加速度センサの信号や、従来より用いられている車速センサの信号を用いて演算される。
【0058】
走行経路判定手段703は、自車位置検出手段701により検出または推定された自車位置と道路勾配認識手段702により認識された道路勾配に応じて走行経路を判定する。
【0059】
目標速度設定手段704は、走行経路判定手段704により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0060】
速度制御手段705は、目標速度設定手段704により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段705により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0061】
本発明の実施例においては、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703、目標速度設定手段704、速度制御手段705の処理を1つのECU内で実現している例を示しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段701、道路勾配認識手段702、走行経路判定手段703の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0062】
エンジンECUは、速度制御手段705から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段705から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0063】
以上説明したように、走行制御装置700を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0064】
次に、道路勾配認識手段702の処理内容について説明する。図8(a)は、道路勾配認識手段702の処理内容を示すフローチャートである。ステップ801において、カメラ2によって検出された自車前方の走行環境(道路の白線、周囲の風景等)を示す画像情報を読込み、ステップ802において、エンジンECUやブレーキECU、各種センサ等の車両状態を表すパラメータを用いて自車の速度微分値を読込む。
【0065】
ステップ803において、ステップ801にて読込まれた画像情報や、ステップ802で読込まれた速度微分値に応じて自車近傍の道路勾配θを演算する。
【0066】
ここで、画像情報を用いて自車近傍の道路勾配θを求める方法について図8(b)を用いて説明する。図8(b)において、道路端の白線と水平線の成す角度をφとする。図の実線A(またはA')で示すように、自車前方の道路が平坦路の場合の角度をφoとし、図の点線B(またはB')で示すように、自車前方の道路が上り勾配の場合の角度をφuとする。また、図の一点鎖線C(またはC')で示すように、自車前方の道路が下り勾配の場合の角度をφdとすると、3つの角度はφu>φo>φdという関係がある。したがって、道路形状(例えば白線)と水平線の成す角度φを用いて自車前方の道路勾配θを関数fにより演算できる。この関数fは、カメラの取付け位置等に応じて決定される。
【0067】
次に、自車の速度微分値を用いて自車近傍の道路勾配θを求める方法について説明する。車両重量をM、車両加速度をα、車両駆動力をFv、路面との摩擦や空気に起因する走行抵抗をRa、勾配抵抗をRb(上り勾配:Rb>0、下り勾配:Rb<0)とすると、車両の運動方程式は(1)式で表される。
M・α=Fv−Ra−Rb (1)
車両駆動力Fv、走行抵抗Ra、勾配抵抗Rbは、関数g、v、zを用いて(2)〜(4)式で表される。
Fv=g(TEG) (2)
Ra=v(VSP) (3)
Rb=z(θ) (4)
ここで、TEGはエンジン5のトルク、VSPは車両速度である。(1)〜(3)式を整理することにより(5)式を得る。
z(θ)=g(TEG)−v(VSP)−M・α (5)
関数gは変速機6のギア比やタイヤ半径、動力伝達系の効率等によって定まり、関数vは路面との摩擦係数や空気抵抗係数によって定まる。また、関数zの簡単な例を(6)式に示す。
z(θ)=M・sinθ (6)
(5)、(6)式からわかるように、車両の状態パラメータとして、エンジン5のトルクTEG、車両速度VSP、車両加速度αを用いて道路勾配θを算出することが可能となる。車両加速度αは、図示しない速度微分値検出手段により検出される。例えば、加速度センサから検出された信号に応じて車両加速度を演算しても良いし、従来用いられている回転センサの信号に応じて演算される車両速度VSPの擬似微分値を用いても良い。
【0068】
さらに、この道路勾配θを用いて自車の高度Hも求めることができる。例えば、車両速度VSPは単位時間当りの走行距離Lに相当する。したがって、高度の基準値Hoを用いて高度Hは(7)式を用いて算出できる。
H=Ho+∫(L・sinθ)dt (7)
以上説明したように、カメラ2から検出された画像情報や、図示しないエンジンECU、ブレーキECUおよび各種センサ等から受信した車両の状態パラメータを用いて、道路勾配認識手段702により自車近傍の道路勾配を求めることが可能となる。また、演算した道路勾配に応じて自車の高度も求めることが可能になるため、立体交差や並行道路の検出精度が大幅に向上する。
【0069】
次に、道路勾配認識手段702により認識された自車近傍の道路勾配を利用して立体交差を判定する方法について説明する。本発明の実施例では走行経路判定手段703により立体交差を判定する。
【0070】
図9は、走行経路判定手段703の処理内容を示すフローチャートである。ステップ901において、自車位置検出手段701にて検出または推定された自車位置の情報を読み込む。
【0071】
次に、ステップ902において、ステップ901にて読込まれた自車位置の情報から、自車が立体交差の近傍に進入したか否かの判定を行い、立体交差近傍に進入したと判定された場合にはステップ903に進み、立体交差近傍に進入していないと判定された場合にはステップ901に戻る。
【0072】
ステップ903において、道路勾配認識手段702にて演算された高度Hを読込み、ステップ904において、Hの値に応じて立体交差における自車の走行経路を判定する。ステップ904において、H≧所定値と判定された場合には、ステップ905に進み、ステップ905において立体交差の上側を走行中と判断して処理を終了する。ステップ904において、H<所定値と判定された場合には、ステップ906に進み、ステップ906において立体交差の下側を走行中と判断して処理を終了する。
【0073】
以上説明したように、道路勾配認識手段702により認識された自車近傍の道路勾配に応じて推定される自車の高度を用いて、走行経路判定手段703により立体交差を判定することが可能となる。
【0074】
次に、図6から図9に示す本発明の実施形態による効果について、図10と図11を用いて説明する。
【0075】
図10は、走行経路の勾配情報から立体交差や並行道路を判断する場合の走行概略図である。図10において、道路(1)は直線路であり、道路(1)に並行する道路(2)の前方にはカーブが存在する。また、道路(1)は道路(2)のカーブ出口付近で道路(2)と立体交差しており、道路(1)は道路(2)の上側を交差している。いま、道路(1)(直線)のA点を自車が走行しており、立体交差エリア近傍のB点に自車が進入した場合を想定する。
【0076】
従来のナビゲーションにより走行経路の検出を行った場合には、マップマッチングの精度等により、道路(1)と並行する道路(2)のB'(カーブ)を自車の走行経路として誤検出する可能性がある。このような誤検出が発生した場合には、前方のカーブを認識してしまい、図の直線路を走行しているにも関わらずに自動的に減速を行う現象が発生して乗員に違和感を与える。
【0077】
本発明を用いた場合には、前述の走行環境認識手段により、図のB点付近で自車近傍の道路勾配を求めることが可能となる。さらに、図9に示すような走行経路判定手段により、自車近傍の道路勾配、それに応じて算出した自車の高度情報から、立体交差の上側、下側を判定することが可能となり、図のB'点を誤検出すること無く走行経路である図のB点を検出することができる。
【0078】
図11は、図10で示す立体交差を走行中に速度調整を行った場合のタイムチャートである。
【0079】
前述のとおり、従来ナビゲーションシステムを用いた走行経路の検出では、図8に示すような立体交差において、走行経路が図10のB'点付近と誤判断され、道路(1)の直線路を走行しているにも関わらずに自動的に減速を行ってしまうという場合がある。したがって、図11に示すように、立体交差進入開始点の直前で下側の道路(2)を誤って認識してしまい、速度Voから速度Vcまでの減速が発生し、乗員に違和感を与える。
【0080】
これに対し、本発明では、自車近傍の道路勾配、それに応じて算出した自車の高度情報を用いて確実な立体交差の判断が可能となり、誤った減速を防止して速度Voを継続して維持することができ、違和感の無い速度調整が可能となる。
【0081】
また、図10のB’点でイグニッションスイッチが遮断されたとき、道路勾配の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに道路勾配の情報が初期化されてしまうため、立体交差を誤判定するケースが存在する。
【0082】
したがって、イグニッションスイッチが遮断されたときには、認識された道路勾配の履歴をEEPROMやバックアップRAM等のメモリに記憶しておく。そして、イグニッションスイッチが接続されたときにはメモリに記憶された道路勾配の履歴に応じて、自車近傍の道路勾配を認識することが望ましい。このように、認識された道路勾配の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。
【0083】
次に、自車前方の料金収受装置の種類を認識して速度の自動調整をスムーズに行う自動車の走行制御システムについて、図12から図16を用いて説明する。
【0084】
図12は、自動料金収受システム(ETC:Electronic Toll Collection Systems)の概略図である。
【0085】
自車1200がETCの設置された道路1210を走行してETCに近づくと、センサ1201により自車1200が感知されて、路側無線装置1202と自車に搭載された図示しない車載機が通信を開始する。この通信により、ICカード等で前記車載機に記憶されている車載情報が認識されると、ゲート1203に取り付けられた遮断機1204が開く。ゲート1203の通過可否を自車1200に報知する路側表示装置1207が制御されて、自車1200はゲート1203を通過可能な状態となる。自車1200がゲート1203を通過し、車両検知機1205と車線監視装置1206により自車1200がゲート1203を通過したことが確認されると、ゲート1203が制御されて遮断機1204が閉じる。料金の収受は路側無線装置1202と前記車載機によって通信された車載情報に基づいて、クレジットカード等により行われる。
【0086】
一方、上述した自動料金収受システムにおいては、通信の遅延やゲートの応答遅れによる事故を防止するため、通過可能な速度に制限が設けられている。例えば、高速道路に設置されているETCの場合、現状20km/hの制限速度が規定されている。
【0087】
これに対し、従来の手動による料金所においては、料金所に配備された係員と運転者の間で手動により料金の収受が行われるため、料金所を通過する際には自車の速度を必然的に0km/h(停止)とする必要がある。
【0088】
現在では、自動料金収受システム(ETC)は普及段階にあるため、従来の手動により料金の収受を行う料金所にETCシステムが混在しているのが実状である。したがって、速度の自動調整をスムーズに行うためには、料金所の種類を認識してETC装着車と一般車(ETC非装着車)で異なる目標速度を設定する必要がある。
【0089】
図13は本発明の一実施形態による走行制御システムの構成図である。車体1310には、インフラストラクチャである料金所1350と通信を行う車載機1351が搭載されており、車載機1351とLAN(Local Area Network)により通信を行う走行制御装置1300が搭載されている。なお、動力伝達系およびカメラ、GPS、アンテナ等の主要構成については図1に示した構成と同様であるため、その説明を省略する。
【0090】
次に、走行制御装置1300の構成および処理について説明する。走行制御装置1300は、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303、目標速度設定手段1304、速度制御手段1305から構成される。以下に示す処理の内容は、走行制御装置1300の図示しないコンピュータにプログラミングされ、予め定められた周期で繰り返し実行される。
【0091】
自車位置検出手段1301は、CD−ROMやDVD−ROM、ハードディスク等の記録媒体に記憶された地図DBの情報と、アンテナ3により受信された自車位置に関する情報に応じて自車位置の検出または推定を行う。なお、自車位置検出手段1301については、図2に示した自車位置検出手段101の処理内容と同様であるため、その説明を省略する。
【0092】
料金収受装置認識手段1302は、カメラ2により検出した画像情報や、インフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識する。インフラストラクチャからの信号は、車載機1351等を用いて受信され、LAN(Local Area Network)を用いて走行制御装置1300等のECU(Electric Control Unit)に送信される。
【0093】
走行経路判定手段1303は、自車位置検出手段1301により検出または推定された自車位置と料金収受装置認識手段1302により認識された料金収受装置の種類に応じて走行経路を判定する。
【0094】
目標速度設定手段1304は、走行経路判定手段1304により判定された走行経路に応じて目標速度を設定する。例えば、走行経路の前方にカーブがある場合には、乗員に恐怖感や違和感を与えないように、カーブの曲率半径に応じた目標速度を設定する。
【0095】
速度制御手段1305は、目標速度設定手段1304により設定された目標速度を実現するように、エンジン5の目標トルク、ブレーキ21、22の目標圧力(または目標トルク)を演算する。速度制御手段1305により演算された目標トルクおよび目標圧力(または目標トルク)は、それぞれエンジンECU、ブレーキECUに送信される。
【0096】
本実施例においては、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303、目標速度設定手段1304、速度制御手段1305の処理を1つのECU内で実現しているが、これらの処理は複数のECUを用いて実現しても良い。例えば、自車位置検出手段1301、料金収受装置認識手段1302、走行経路判定手段1303の処理を車載情報端末であるナビゲーションに実装されたコンピュータにプログラミングして実行することも可能である。
【0097】
エンジンECUは、速度制御手段1305から受信した目標トルクに応じてエンジン5の制御信号を出力し、ブレーキECUは、速度制御手段1305から受信した目標圧力(または目標トルク)に応じてブレーキ21、22の制御信号を出力する。
【0098】
以上説明したように、走行制御装置1300を用いて、走行経路に応じて目標速度を設定し、自車の速度を制御することが可能となる。
【0099】
次に、料金収受装置認識手段1302の処理内容について説明する。図14は、料金収受装置認識手段1302の処理内容を示すフローチャートである。ここでは、料金所の種類を表すパラメータとしてTOLLBOOTHという変数を設けている。
【0100】
ステップ1401において、カメラ2によって検出された自車前方の走行環境(料金所1350の種別を表示する看板等)を示す画像情報を読込む。ステップ1402において、図12で示した路側無線装置1202から車載機1351に送信された料金所情報を読込む。
【0101】
ステップ1403において、ステップ1401にて読込まれた画像情報や、ステップ1402にて読込まれた料金所情報から、自車前方の料金所がETCであるか否かを判定する。ETCであると判定された場合にはステップ1404に進み、TOLLBOOTHに1を代入して処理を終了する。ステップ1403において、ETCでないと判定された場合にはステップ1405に進み、TOLLBOOTHに0を代入して処理を終了する。
【0102】
以上説明したように、料金収受装置認識手段1302を用いて、カメラ2により検出した画像情報や、料金所1100から車載機1101に送信された料金所情報に応じて料金所の種類を認識することが可能となる。
【0103】
次に、自車位置検出手段1301により検出または推定された自車位置と、料金収受装置認識手段1302により認識された料金所の種類に応じて自車の走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定する方法について説明する。本発明の実施例では走行経路判定手段1303ないし目標速度設定手段1304によりこれらの処理を行う。
【0104】
図15は、自車の走行経路を判定し、判定された走行経路に応じて目標速度設定する手段の処理内容を示すフローチャートである。ステップ1501において、自車位置検出手段1301により検出または推定された自車位置を読込む。ステップ1502において、料金収受装置認識手段1302により認識された料金所の種類(変数TOLLBOOTH)を読込む。
【0105】
ステップ1503において、ステップ1502において読込まれた変数TOLLBOOTHの値が1であるか否かの判定を行う。変数TOOLBOOTH=1(ETC)と判定された場合にはステップ1504に進み、目標速度の最終値をETCで規定されている制限速度V1(例えば20km/h)に設定する。そして、ステップ1501において読込まれた走行経路に応じて現在の目標速度VcからV1まで徐々に目標速度を低下させる処理を行う。ステップ1503において、変数TOOLBOOTH=0(ETC以外)と判定された場合にはステップ1505に進み、手動で料金の収受を行うことを想定して目標速度の最終値を制限速度V2(例えば0km/h)に設定する。そして、ステップ1501において読込まれた自車位置に応じて現在の目標速度VcからV2まで徐々に目標速度を低下させる処理を行う。
【0106】
以上説明したように、自車の走行経路を判定し、判定された走行経路に応じて目標速度を設定することにより速度の自動調整を行うことが可能となる。
【0107】
図16は、料金所の種類を認識して速度調整を行った場合のタイムチャートである。図のa点は走行経路検出手段により自車が料金所の付近に近づいたことが識別される時刻を示しており、図のc点は料金収受地点のごく近傍に自車が到達する時刻である。
【0108】
図のa点で自車が料金所の付近に近づいたことが識別されると、走行環境認識手段により料金所の種類が認識される。このとき、ETC車載機を搭載していない車の場合は、インフラストラクチャである路側無線装置と通信が行われない。このために、料金所の種類を示すパラメータTOOLBOOTH=0(ETC以外)となるので、手動により料金収受を行う料金所(一般の料金所)であると認識される。したがって、図のc点で自車の速度がV2(例えば0km/h)となるように減速制御が行われる。また、ETC車載機を搭載している車が一般の料金所に進入した場合は、カメラ等により検出された画像情報から料金所の種類を認識して同様の制御を行う。
【0109】
一方、ETC車載機を搭載している車がETC料金所に進入した場合は、路側無線装置と通信が行われて料金所の種類を示すパラメータTOOLBOOTH=1(ETC)となるのでETC料金所であると認識される。したがって、図のc点で自車の速度がV1(例えば20km/h)となるように減速制御が行われる。このとき、一般の料金所の場合と比較して現在の目標速度VcとV1の差が小さくなるので、車両の減速度(速度変化)を同等にして両者の違和感を低減するためには、減速開始タイミングを図のa点から所定時間経過後のb点にすることが望ましい。
【0110】
以上説明したように、複数の種類の料金所が混在する領域において、走行環境認識手段により料金所の種類を認識し、料金所の種類に応じて目標速度の設定を行うことにより、目標速度の設定を変更することが可能となる。これにより、速度の自動調整を行う領域が拡大して運転者の負荷を軽減できる。
【0111】
さらに、図のd点でETC料金所を認識中に一般料金所に進入した場合などは、料金収受地点(図のc点)で自車の速度をV2にする必要があるため、図の一点鎖線で示すように、図のd点から車両の減速度(速度変化)が変化するように目標速度を設定することが望ましい。このような場合には、警報装置や表示装置を用いて運転者への報知をすることで違和感の無い減速制御が行える。
【0112】
また、アクセルペダルやブレーキペダルといった操作系のアクチュエータを制御して運転者への報知を実現しても良い。例えば、上述のETC料金所を認識中に一般料金所に進入した場合などは、アクセルペダル反力を大きく設定し、運転者の操作負荷を増大させて減速度の変化を報知することができる。
【0113】
また、料金収受装置の種類をETCと認識した後でイグニッションスイッチが遮断されたとき、料金収受装置の種類の情報がメモリ等に記憶されていない場合には、イグニッションスイッチが再度接続されたときに料金収受装置の種類の情報が初期化(例えば、TOOLBOOTH=0)されてしまう。このため、料金収受装置の種類を誤判定するケースが存在する。したがって、イグニッションスイッチが遮断されたときには、認識された自車前方の料金収受装置の種類の履歴をEEPROMやバックアップRAM等のメモリに記憶する。そして、イグニッションスイッチが接続されたときにはメモリに記憶された料金収受装置の種類の履歴に応じて、自車前方の料金収受装置の種類を認識することが望ましい。
【0114】
このように、認識された料金収受装置の種類の履歴をバックアップすることにより走行経路の誤判定を防止でき、正確な走行経路の判定が可能となる。さらに、走行経路の誤判定による目標速度の設定ミスを回避することができ、安全な走行を支援することができる。
【0115】
本実施形態においては、車両が減速制御を行う場合について記載したが、加速制御を行う場合についても同様の効果が得られる。例えば、カーブ路の前方が直線路となっている場合には、カーブ進入時に一旦減速制御を行い、カーブ出口付近から徐々に速度を増加させて直線路に応じた速度まで増加させる必要がある。このような場合においても本発明が有効であることは言うまでもない。
【0116】
本発明の実施形態では、駆動力源としてエンジンを備えた自動車について説明したが、駆動力源としてモータを備えた電気自動車、駆動力源としてエンジンとモータの両方を備えたハイブリッド自動車を対象としても良い。また、本発明では前輪、後輪ともに駆動する4WD車を実施例としているが、前輪駆動、あるいは後輪駆動の自動車も本発明の対象となる。
【図面の簡単な説明】
【0117】
【図1】本発明の一実施形態に係る走行制御システムの構成図。
【図2】自車位置検出手段の処理内容を示す制御フローチャート。
【図3】走行車線認識手段の処理内容を示す制御フローチャート。
【図4】走行経路判定手段の処理内容を示す制御フローチャート。
【図5】走行車線の情報から分岐路を判断する場合の走行概略図。
【図6】カーブ形状に応じて速度調整を行った場合のタイムチャート。
【図7】本発明の他の実施形態に係る走行制御システムの構成図。
【図8】走行環境認識手段の処理内容を示す制御フローチャート。
【図9】走行経路判定手段の他の処理内容を示す制御フローチャート。
【図10】走行経路の勾配情報から立体交差や並行道路を判断する場合の走行概略図。
【図11】立体交差を走行中に速度調整を行った場合のタイムチャート。
【図12】自動料金収受システム(ETC)の概略図。
【図13】本発明の更に他の実施形態に係る走行制御システムの構成図。
【図14】料金収受装置認識手段の処理内容を示す制御フローチャート。
【図15】走行経路を判定して目標速度を設定する手段の処理内容を示すフローチャート。
【図16】料金収受装置の種類を認識して速度調整を行った場合のタイムチャート。
【符号の説明】
【0118】
2…カメラ、3…GPSアンテナ、4…GPS衛星、5…エンジン、6…変速機、7…動力分割機構、8,9…プロペラシャフト、10…車体、11,12…ブレーキ、21,22…タイヤ、100…走行制御装置、101…自車位置検出手段、102…走行車線認識手段、103…走行経路判定手段、104…目標速度設定手段、105…速度制御手段。
【特許請求の範囲】
【請求項1】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項2】
請求項1において、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする車載情報端末。
【請求項3】
請求項2において、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする車載情報端末。
【請求項4】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項5】
請求項4において、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする自動車の走行制御システム。
【請求項6】
請求項5において、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする自動車の走行制御システム。
【請求項7】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報と自車の操舵角に応じて自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御装置。
【請求項8】
地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項9】
請求項8において、イグニッションスイッチが遮断されたときに認識された走行車線の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された走行車線の履歴に応じて自車の走行車線を認識することを特徴とする自動車の走行制御方法。
【請求項10】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項11】
請求項10において、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする車載情報端末。
【請求項12】
請求項10において、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする車載情報端末。
【請求項13】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項14】
請求項13において、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする自動車の走行制御システム。
【請求項15】
請求項13において、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする自動車の走行制御システム。
【請求項16】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識する道路勾配認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御装置。
【請求項17】
地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項18】
請求項17において、イグニッションスイッチが遮断されたときに認識された道路勾配の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された道路勾配の履歴に応じて自車近傍の道路勾配を認識することを特徴とする自動車の走行制御方法。
【請求項19】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項20】
請求項19において、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする車載情報端末。
【請求項21】
請求項19において、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする車載情報端末。
【請求項22】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項23】
請求項22において、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする自動車の走行制御システム。
【請求項24】
請求項22において、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする自動車の走行制御システム。
【請求項25】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項26】
地図情報に応じて自車位置の検出または推定を行い、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項27】
請求項26において、イグニッションスイッチが遮断されたときに認識された料金収受装置の種類の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された料金収受装置の履歴に応じて自車前方の料金収受装置の種類を認識することを特徴とする自動車の走行制御方法。
【請求項1】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項2】
請求項1において、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする車載情報端末。
【請求項3】
請求項2において、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする車載情報端末。
【請求項4】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項5】
請求項4において、前記走行車線認識手段は画像情報に応じて自車の走行車線を認識することを特徴とする自動車の走行制御システム。
【請求項6】
請求項5において、前記走行車線認識手段は自車の操舵角に応じて自車の走行車線を認識することを特徴とする自動車の走行制御システム。
【請求項7】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報と自車の操舵角に応じて自車の走行車線を認識する走行車線認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記走行車線認識手段により認識された走行車線に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御装置。
【請求項8】
地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項9】
請求項8において、イグニッションスイッチが遮断されたときに認識された走行車線の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された走行車線の履歴に応じて自車の走行車線を認識することを特徴とする自動車の走行制御方法。
【請求項10】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項11】
請求項10において、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする車載情報端末。
【請求項12】
請求項10において、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする車載情報端末。
【請求項13】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車近傍の道路勾配を認識する道路勾配認識手段と、前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項14】
請求項13において、前記道路勾配認識手段は画像情報に応じて道路勾配を認識することを特徴とする自動車の走行制御システム。
【請求項15】
請求項13において、前記道路勾配認識手段は自車の速度微分値に応じて道路勾配を認識することを特徴とする自動車の走行制御システム。
【請求項16】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識する道路勾配認識手段と、前記自車位置検出手段により検出または推定された自車位置と前記道路勾配認識手段により認識された道路勾配に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御装置。
【請求項17】
地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項18】
請求項17において、イグニッションスイッチが遮断されたときに認識された道路勾配の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された道路勾配の履歴に応じて自車近傍の道路勾配を認識することを特徴とする自動車の走行制御方法。
【請求項19】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、を有することを特徴とする車載情報端末。
【請求項20】
請求項19において、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする車載情報端末。
【請求項21】
請求項19において、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする車載情報端末。
【請求項22】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項23】
請求項22において、前記料金収受装置認識手段は画像情報に応じて料金収受装置の種類を認識することを特徴とする自動車の走行制御システム。
【請求項24】
請求項22において、前記料金収受装置認識手段はインフラストラクチャから受信した信号に応じて料金収受装置の種類を認識することを特徴とする自動車の走行制御システム。
【請求項25】
地図情報に応じて自車位置を検出または推定する自車位置検出手段と、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識する料金収受装置認識手段と、前記料金収受装置認識手段により認識された料金収受装置の種類に応じて走行経路を判定する走行経路判定手段と、前記走行経路判定手段により判定された走行経路に応じて自車の目標速度を設定する目標速度設定手段と、前記目標速度設定手段により設定された目標速度に応じて自車の速度を制御する速度制御手段と、を有することを特徴とする自動車の走行制御システム。
【請求項26】
地図情報に応じて自車位置の検出または推定を行い、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定し、判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御することを特徴とする自動車の走行制御方法。
【請求項27】
請求項26において、イグニッションスイッチが遮断されたときに認識された料金収受装置の種類の履歴を記憶し、イグニッションスイッチが接続されたときに記憶された料金収受装置の履歴に応じて自車前方の料金収受装置の種類を認識することを特徴とする自動車の走行制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2006−284414(P2006−284414A)
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願番号】特願2005−105936(P2005−105936)
【出願日】平成17年4月1日(2005.4.1)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願日】平成17年4月1日(2005.4.1)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]