
車載機及びプログラム
【課題】記録される走行履歴データのデータ量の増加を抑制しつつ、精度の高い走行経路の判定を可能とすること。
【解決手段】車載機は、位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、前記記録手段に記録された情報を送信する送信手段とを有する。
【解決手段】車載機は、位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、前記記録手段に記録された情報を送信する送信手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載機及びプログラムに関し、特に走行履歴に関する情報を記録する車載機及びプログラムに関する。
【背景技術】
【0002】
道路上を走行している車両の交通量や渋滞状況などを把握するため、車載機において記録された走行履歴データが道路に設置されたビーコンを介してセンタシステムに転送する技術がある(例えば、特許文献1)。
【0003】
走行履歴データは、車両のGPS情報(位置情報及び時刻情報等)の履歴データである。従来、車載機は、走行履歴データを所定の走行距離(以下、「単位距離」という。)周期で記録していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−227317号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、走行履歴データを記録するタイミングが走行距離に依存している場合、正確な走行経路を得るためには不十分なときがある。
【0006】
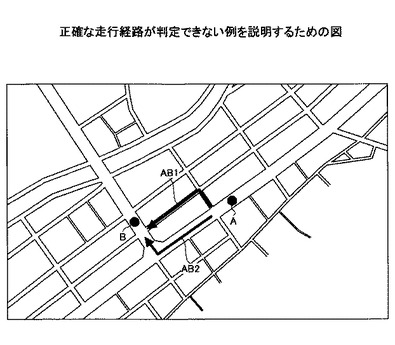
図1は、正確な走行経路が判定できない例を説明するための図である。同図において、地点A及びBは、走行履歴データが記録された地点である。地点Aから地点Bへの走行距離が単位距離未満であった場合、その間において走行履歴データは記録されない。その結果、実際の走行経路は経路AB1であるのか経路AB2であるのか判定することができなくなってしまう。このような場合、センタシステムは、例えば、主要道路又は幹線道路を優先的に走行経路として選択する。したがって、経路AB2が走行経路として記録されることになる。そうすると、実際には経路AB1を走行した車両については、誤った走行経路が記録されてしまうことになる。すなわち、単位距離の間に複数の経路が存在する場合、必ずしも正しい走行経路が記録されるとは限らない。
【0007】
斯かる問題を回避するため、単位距離を短くすることが考えられる。しかし、単位距離を短くすると、走行経路の精度向上が図られる半面、走行履歴データのデータ量が増加し、車載機の記憶容量が飽和状態になる可能性が高まる。また、走行履歴データのデータ量の増加は、車両がビーコンの通信範囲を通過する限られた時間内に、全ての走行履歴データのアップリンクを困難にするという問題もある。
【0008】
ここで、ロッシー方式による圧縮方式を用いて走行履歴データを圧縮すると、データ量を削減することができる。但し、ロッシー方式の場合、圧縮データを解凍しても元データを完全に復元することができないため、走行履歴データの精度が劣化してしまう。そのため、解凍した復元後の走行履歴データにおいて、GPS(Global Positioning System)測定精度誤差以上の位置誤差が発生してしまい、実際の走行経路が相違してしまう可能性がある。
【0009】
本発明は、上記の点に鑑みてなされたものであって、記録される走行履歴データのデータ量の増加を抑制しつつ、精度の高い走行経路の判定を可能とすることのできる車載機及びプログラムの提供を目的とする。
【課題を解決するための手段】
【0010】
そこで上記課題を解決するため、車載機は、位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、前記記録手段に記録された情報を送信する送信手段とを有する。
【発明の効果】
【0011】
開示された装置又はプログラムによれば、記録される走行履歴データのデータ量の増加を抑制しつつ、精度の高い走行経路の判定を可能とすることができる。
【図面の簡単な説明】
【0012】
【図1】正確な走行経路が判定できない例を説明するための図である。
【図2】本発明の実施の形態における車載機のハードウェア構成例を示す図である。
【図3】制御部のハードウェア構成例を示す図である。
【図4】制御部の機能構成例を示す図である。
【図5】距離単位記録部による処理手順を説明するためのフローチャートである。
【図6】記録周期記憶部の構成例を示す図である。
【図7】走行履歴データ記憶部の構成例を示す図である。
【図8】進行方位単位記録部による処理手順を説明するためのフローチャートである。
【図9】ビーコン通過時に実行される処理手順を説明するためのフローチャートである。
【図10】本実施の形態による改善例を説明するための図である。
【発明を実施するための形態】
【0013】
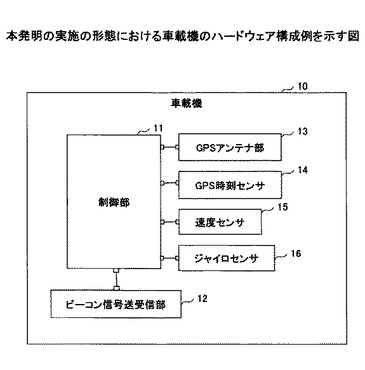
以下、図面に基づいて本発明の実施の形態を説明する。図2は、本発明の実施の形態における車載機のハードウェア構成例を示す図である。車載機10は、一般的にカーナビ(カーナビゲーション)と呼ばれている電子機器である。同図において、車載機10は、制御部11、ビーコン信号送受信部12、GPSアンテナ部13、GPS時刻センサ14、速度センサ15、及びジャイロセンサ16等を有する。
【0014】
制御部11は、車載機10全体をプログラムによって制御する機能を有している。本実施の形態において、制御部11は、車載機10を搭載した車両(自動車)の走行履歴データの記録及び走行履歴データのビーコンへの送信等を行う。走行履歴データとは、所定のタイミングにおいて時刻、車両の位置情報等が記録されたデータをいい、一般的にプローブデータとも呼ばれている。ビーコンとは、道路に設置された機器(路側機)であり、車載機10より走行履歴データ等を受信したり、車載機10に対して交通情報、例えば、VICS情報等のデータを送信したりする機器である。ビーコンによって受信された走行履歴データは、非図示のセンタシステム(例えば交通管制センタ)に転送される。センタシステムは、収集された複数の走行履歴データに基づいて道路交通情報等を生成するコンピュータシステムである。
【0015】
ビーコン信号送受信部12は、ビーコンへのデータ(走行履歴データ等)の送信、又はビーコンからのデータの受信等を行う。GPSアンテナ部13は、GPS(Global Positioning System)衛星より受信される電波(以下、「GPS電波」という。)に基づいて、車両の位置情報(緯度経度)を算出し、位置情報を制御部11に入力する。GPS時刻センサ14は、GPS電波に含まれている時刻情報を制御部11に入力する。
【0016】
速度センサ15は、車両の走行速度(以下、単に「速度」という。)を検出し、速度情報を制御部11に入力する。速度センサ15による速度の検出は、GPS電波に基づいて行われてもよいし、車両に備えられている速度メータからの入力や車速パルスに基づいて行われてもよい。ジャイロセンサ16は、いわゆるジャイロスコープであり、車両の姿勢(方向)を検出する装置である。したがって、車両の走行中におけるジャイロセンサ16による検出値は、車両の進行方位(進行方向)を示す。
【0017】
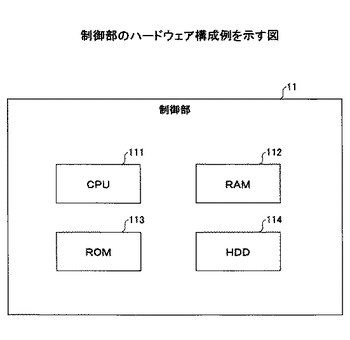
図3は、制御部のハードウェア構成例を示す図である。制御部11は、CPU111、RAM112、ROM113、及びHDD114等を有する。ROM113には、各種のプログラムやプログラムによって利用されるデータ等が記録されている。RAM112は、プログラムをロードするための記憶領域や、ロードされたプログラムのワーク領域等として用いられる。CPU111は、RAM112にロードされたプログラムを処理することにより、各種の機能を実現する。HDD114には、プログラムやプログラムが利用する各種のデータ等が記録される。
【0018】
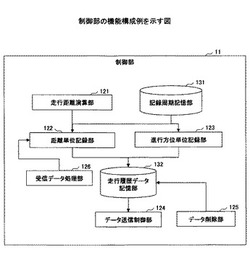
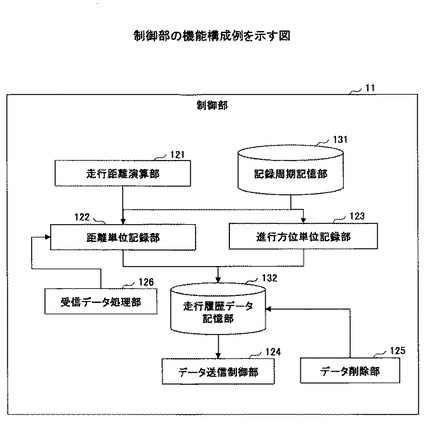
図4は、制御部の機能構成例を示す図である。同図において、制御部11は、走行距離演算部121、距離単位記録部122、進行方位単位記録部123、データ送信制御部124、データ削除部125、受信データ処理部126、記録周期記憶部131、及び走行履歴データ記憶部132等を有する。各部は、RAM112にロードされたプログラムがCPU111に実行させる処理により実現される。
【0019】
走行距離演算部121は、制御部11に入力される位置情報、速度情報、及び時刻情報等に基づいて車両の走行距離を算出する。但し、走行距離は、非図示の走行距離計(オドメータ)によって計測される値が用いられてもよい。
【0020】
距離単位記録部122は、所定の走行距離間隔(以下、「単位距離」という。)で走行履歴データを走行履歴データ記憶部132に記録する。進行方位単位記録部123は、ジャイロセンサ16を所定の周期(以下、「方位確認周期」という。)で確認する。進行方位単位記録部123は、ジャイロセンサ16によって検出される進行方位が所定量(以下、「単位方位」という。)以上変化したタイミングで走行履歴データを走行履歴データ記憶部132に記録する。走行履歴データ記憶部132は、HDD114又はRAM112において、走行履歴データを記憶する記憶領域である。単位距離、方位確認周期、及び単位方位は、記録周期記憶部131に記録されている。すなわち、記憶周期記憶部は、HDD114又はROM113において、単位距離、単位角度、及び単位方位を記憶する記憶領域である。
【0021】
データ送信制御部124は、走行履歴データ記憶部132に記録された走行履歴データをビーコンにアップリンク(送信)する。データ削除部125は、データ送信制御部124によって送信済みの走行履歴データを走行履歴データ記憶部132より削除する。受信データ処理部126は、ビーコンより受信される更新データ等に基づく処理制御を行う。本実施の形態において、受信データ処理部126は、単位距離の変更指示を受信し、当該変更指示を距離単位記録部122に通知する。
【0022】
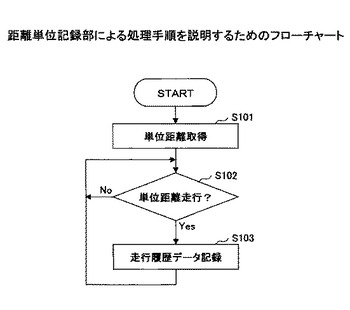
以下、車載機10の処理手順について説明する。図5は、距離単位記録部による処理手順を説明するためのフローチャートである。
【0023】
車載機10の起動に応じ、距離単位記録部122は、単位距離の値を記録周期記憶部131より取得する(S101)。
【0024】
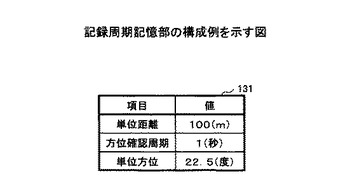
図6は、記録周期記憶部の構成例を示す図である。同図において、記録周期記憶部131には、単位距離、方位確認周期、及び単位方位の値が記録されている。同図の例では、単位距離の値は100(m)とされている。したがって、ステップS101では、「100」が単位距離の値として取得される。
【0025】
続いて、距離単位記録部122は、走行距離演算部121によって算出される走行距離に基づいて、単位距離ごとに走行履歴データを走行履歴データ記憶部132に記録する(S102、S103)。
【0026】
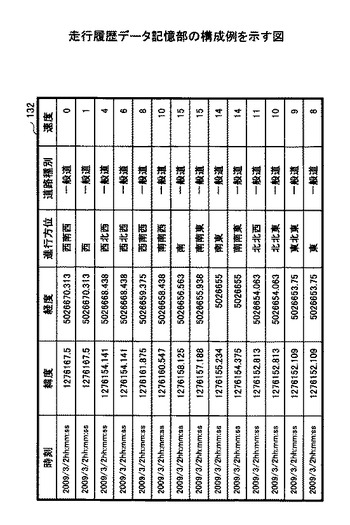
図7は、走行履歴データ記憶部の構成例を示す図である。同図において、走行履歴データ記憶部132は、時刻、緯度、経度、進行方位、道路種別、及び速度等を含む走行履歴データが記録されている。同図の一行分が一回に記録される走行履歴データ(すなわち、一つの走行履歴データ)に相当する。
【0027】
時刻は、走行履歴データが記録された時刻である。図中における、「hh:mm:ss」は、実際には具体的な時分秒を示す。緯度及び経度は、走行履歴データ記録時における車両の位置情報である。当該位置情報は、GPSアンテナ部13より入力される。進行方位情報は、走行履歴データ記録時におけるジャイロセンサ16による検出値である。本実施の形態では、単位方位を22.5度としているため、記録される進行方位の分解能は、16方位で区別されている。また、同図では、東西南北を用いて進行方位が記録されているが、角度によって進行方位が記録されてもよい。道路種別は、走行履歴データ記録時において車両が走行していた道路の種別である。道路種別は、車両の位置情報を非図示の地図データに当てはめることにより判別される、なお地図データは、例えば、HDD114に記録されている。速度は、走行履歴データ記録時における車両の速度である。当該速度は、速度センサ15より入力される。
【0028】
図5の処理が実行されることにより、走行履歴データは、車両が単位距離(例えば、100m)走行するたびに走行履歴データ記憶部132に記録される。但し、距離単位記録部122のみでは、100m以内における走行経路を判別できない場合がある。そこで、進行方位単位記録部123は、図8に示される処理を実行する。
【0029】
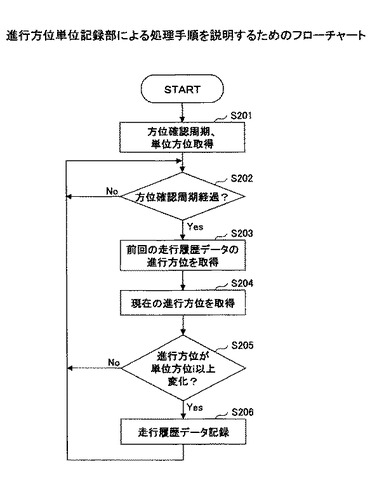
図8は、進行方位単位記録部による処理手順を説明するためのフローチャートである。
【0030】
車載機10の起動に応じ、進行方位単位記録部123は、方位確認周期及び単位方位の値を記録周期記憶部131より取得する(S201)。図6の例では、方位確認周期は1秒、単位方位は22.5度とされている。ステップS201では、これらの値が取得される。
【0031】
続いて、進行方位単位記録部123は、方位確認周期ごと(1秒ごと)にステップS203〜S205を実行する(S202)。方位確認周期の経過は、GPS時刻センサ14より入力される時刻情報に基づいて判定される。
【0032】
ステップS203において、進行方位単位記録部123は、走行履歴データ記憶部132に記録されている走行履歴データのうち、前回(最後又は最近に)記録された走行履歴データの進行方位に関する情報の値(前回の進行方位)を取得する。続いて、進行方位単位記録部123は、現時点におけるジャイロセンサ16による検出値(今回の進行方位)をジャイロセンサ16より取得する(S204)。続いて、進行方位単位記録部123は、前回の進行方位と今回の進行方位との差分が、単位進行方位以上(22.5度以上)であるか否かを判定する(S205)。当該差分が単位進行方位以上である場合(S205でYes)、進行方位単位記録部123は、現時点に係る走行履歴データを走行履歴データ記憶部132に記録する(S206)。一方、当該差分が単位進行方位未満である場合(S205でNo)、走行履歴データの記録は行われない。
【0033】
上記図5及び図8の処理が並列的に実行されることにより、車両が100m走行するごとに、かつ、車両の進行方向が単位進行方向以上変化するたびに走行履歴データが記録される。但し、進行方位単位記録部123によって走行履歴データが記録された場合に、距離単位記録部122による単位距離の計測は初期化されるようにしてもよい。具体的には、単位距離分走行したか否かは、進行方位単位記録部123によって走行履歴データが記録されたときから、計測されるようにしてもよい。この場合、例えば、進行方位単位記録部123は、走行履歴データを記録したときに、距離単位記録部122に走行履歴データを記録したことを通知すればよい。単位距離データ記録部は、当該通知に応じて、計測中の走行距離を0(ゼロ)にリセットすればよい。
【0034】
また、本実施の形態において、単位進行方位を22.5度としているのは、道路の分岐点(交差点又はT字路等)における車両の右折又は左折以外の進行方位の変化を無視するためである。すなわち、車線変更等や蛇行によってもジャイロセンサ16は進行方位の変化を検出する。一方、一般的に、22.5度より鋭角な道路の分岐は少ないと考えられる。そこで、22.5度以上の進路変更時に走行履歴データを記録することにより、走行履歴データの不必要な増加を抑制することが可能になる。但し、このことは、単位進行方位が22.5度に限定されることを意味するものではない。22.5度より鋭角な分岐が存在する場合は、単位進行方位をより小さく(鋭角に)すればよい。なお、単位進行方位を小さくすることにより、車線変更時等において走行履歴データが記録されたとしても、単にデータ量が増加するだけであり、走行経路の精度が劣化するということはない。
【0035】
また、方位確認周期を1秒としているのは、ジャイロによって検出される進行方位を確認する周期(タイミング)が、車両が単位距離の走行に要する時間(単位距離に基づくタイミングによって走行履歴データが記録される周期)よりも短くするためである。すなわち、進行方位単位記録部123によって記録される走行履歴データは、距離単位記録部122によって記録される走行記録データの精度を補うためのものである。それにも拘わらず進行方位単位記録部123による記録周期の方が長くなってしまうと、距離単位記録部122によって記録される走行履歴データの精度を補うことができない可能性が有るからである。したがって、例えば、方位確認周期を速度に応じて変化させてもよい。速度が増加したときは方位確認周期を短くし、速度が減少したときは方位確認周期を長くするようにしてもよい。
【0036】
なお、進行方位単位記録部123による進行方位の変化の検知は、進行方位単位記録部123がジャイロの検出値をポーリングすることによって行われるPULL型でなくてもよい。例えば、ジャイロセンサ16から進行方位単位記録部123に検出値が入力されるPUSH型が採用されてもよい。この場合、方位確認周期ではなく、検出値が変化するたびに前回の進行方位と今回の進行方位との差分が判定されればよい。
【0037】
また、図5又は図8の処理によって記録される走行履歴データは、ロスレス方式の圧縮方式によって圧縮して走行履歴データ記憶部132に記録するようにするとよい。ロスレス方式であれば、圧縮前の情報を完全に復元することができる。したがって、走行履歴データの精度が劣化してしまうことはない。但し、ロスレス方式の場合、ロッシー方式に比べて圧縮率は低い。その結果、圧縮後のデータ量は大きくなる。しかし、本実施の形態による走行履歴データの記録方法によれば、単に単位距離を短くする場合に比べて走行履歴データの記録量を抑制することができる。したがって、ロスレス方式を採用することによるデータ量の増加をさらに緩和することができる。
【0038】
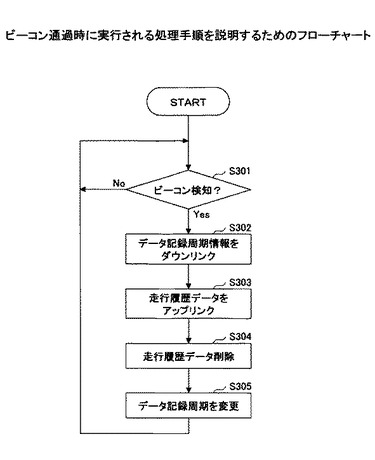
続いて、車両がビーコンを通過する際に実行される処理について説明する。図9は、ビーコン通過時に実行される処理手順を説明するためのフローチャートである。
【0039】
道路に設置されたビーコンより発信(ダウンリンク)されている光(赤外線)又は電波がビーコン信号送受信部12によって検知されると(S301)、受信データ処理部126は、当該光又は電波を介してデータ記録周期情報をビーコンよりダウンリンク(受信)する(S302)。データ記録周期情報は、走行履歴データの記録周期(単位距離)の変更指示を含む情報である。本実施の形態において、単位距離の初期値は100mであるが、例えば、200mに変更すべき旨の指示がデータ記録周期情報に含まれている。
【0040】
続いて、データ送信制御部124は、走行履歴データ記憶部132に記録(蓄積)されている走行履歴データをビーコンにアップリンク(送信)する(S303)。なお、走行履歴データに含まれている全ての項目の値がアップリンクされなくてもよい。例えば、進行方位、道路種別、及び速度はアップリンクされなくてもよい。一方、毎回記録される走行履歴データに含まれていない情報(例えば、車長情報)がアップリンクの対象とされてもよい。なお、上記したように、本実施の形態では、単位距離を短くする場合に比べて走行履歴データのデータ量は削減されている。したがって、走行履歴データのアップリンクが完了する前に車両がビーコンの通信範囲を通過してしまうという可能性が低減される。
【0041】
続いて、データ削除部125は、アップリンクされた走行履歴データを走行履歴データ記憶部132より削除する(S304)。アップリンク済みの走行履歴データが削除されることにより、記憶領域の飽和の可能性を低減させることができる。なお、ビーコンに送信された走行履歴データは、センタシステムに転送され、道路交通情報の入力情報として処理される。
【0042】
続いて、受信データ処理部126は、受信されたデータ記録周期情報に含まれている単位距離を距離単位記録部122に通知し、単位距離の設定を変更する(S305)。距離単位記録部122は、以降において、通知された単位距離に基づいて走行履歴データの記録を行う。
【0043】
単位距離データを変更することにより、事情に応じた走行履歴データの記録が可能となる。例えば、ビーコンの少ない地域においては、単位距離を長くすることにより、ビーコン間において記録される走行履歴のデータ量を削減することができる。なお、単位距離データの変更は必須の処理ではない。単位距離データを初期値のまま変更しない場合には、ステップS302及びS305を省略することが可能である。
【0044】
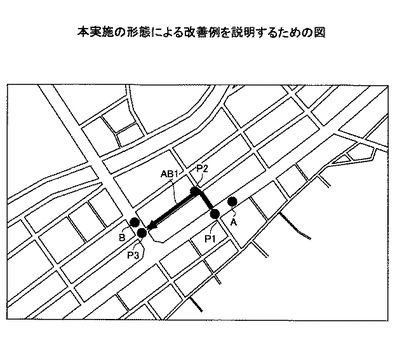
上述したように、本実施の形態における車載機10によれば、進行方位単位記録部123によって車両の進行方位が変化するたびに走行履歴データが記録される。したがって、交差点やT字路等の曲がり角において、走行履歴データが記録される。その結果、図1に示した状況は、図10に示されるように改善される。
【0045】
図10は、本実施の形態による改善例を説明するための図である。同図中、図1と同一部分には同一符号を付している。
【0046】
同図において、地点A及びBでは、距離単位記録部122によって走行履歴データが記録される。また、地点P1、P2、及びP3では、車両の進行方位の変化に応じて進行方位単位記録部123によって走行履歴データが記録される。その結果、地点A及びBの間では、経路AB1が利用されたことが判別可能となる。
【0047】
したがって、都市部のように複数の道路が密集しており、単位距離間に複数の経路が存在している場合やビーコンの設置が少ない地域であっても、実際に車両が走行した経路を導出可能な走行履歴データを記録することができる。その結果、センタシステム側においては、精度の高いマップマッチングを行うことが可能となり、道路交通情報の精度を向上させることができる。例えば、マップマッチングの精度が向上することにより、ロスレス方式によって精度が維持された走行履歴データに含まれる車長情報等に基づいて渋滞長の計測(推測)の精度を向上させることも可能となる。
【0048】
また、単位距離を長くしたとしても、進行方位が変化した地点が明確であれば、精度の高い走行経路を導出することができる。したがって、本実施の形態の車載機10によれば、単位距離を長くすることにより、距離単位記録部122によって記録される走行履歴データのデータ量を削減することも可能である。
【0049】
以上、本発明の実施例について詳述したが、本発明は斯かる特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0050】
以上の説明に関し、更に以下の項を開示する。
(付記1)
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、
前記記録手段に記録された情報を送信する送信手段とを有する車載機。
(付記2)
前記第二の記録手段は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する付記1記載の車載機。
(付記3)
前記送信手段によって送信された情報を前記記憶手段より削除する削除手段を有する付記1又は2記載の車載機。
(付記4)
さらに、通信網を介して他コンピュータからの信号を受信する受信手段を有し、
前記第一の記録手段は、前記受信手段により受信された情報に基づいて、前記所定の走行距離間隔を変化させる付記1乃至3いずれか一項記載の車載機。
(付記5)
車載機に、
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手順と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手順と、
前記記録手段に記録された情報を送信する送信手順とを実行させるためのプログラム。
(付記6)
前記第二の記録手順は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する付記5記載のプログラム。
(付記7)
前記送信手順において送信された情報を前記記憶手段より削除する削除手順を有する付記5又は6記載のプログラム。
(付記8)
前記第一の記録手順は、通信網を介して他コンピュータから受信した情報に基づいて、前記所定の走行距離間隔を変化させる付記5乃至7いずれか一項記載のプログラム。
【符号の説明】
【0051】
10 車載機
11 制御部
12 ビーコン信号送受信部
13 GPSアンテナ部
14 GPS時刻センサ
15 速度センサ
16 ジャイロセンサ
111 CPU
112 RAM
113 ROM
114 HDD
121 走行距離演算部
122 距離単位記録部
123 進行方位単位記録部
124 データ送信制御部
125 データ削除部
126 受信データ処理部
131 記録周期記憶部
132 走行履歴データ記憶部
【技術分野】
【0001】
本発明は、車載機及びプログラムに関し、特に走行履歴に関する情報を記録する車載機及びプログラムに関する。
【背景技術】
【0002】
道路上を走行している車両の交通量や渋滞状況などを把握するため、車載機において記録された走行履歴データが道路に設置されたビーコンを介してセンタシステムに転送する技術がある(例えば、特許文献1)。
【0003】
走行履歴データは、車両のGPS情報(位置情報及び時刻情報等)の履歴データである。従来、車載機は、走行履歴データを所定の走行距離(以下、「単位距離」という。)周期で記録していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−227317号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、走行履歴データを記録するタイミングが走行距離に依存している場合、正確な走行経路を得るためには不十分なときがある。
【0006】
図1は、正確な走行経路が判定できない例を説明するための図である。同図において、地点A及びBは、走行履歴データが記録された地点である。地点Aから地点Bへの走行距離が単位距離未満であった場合、その間において走行履歴データは記録されない。その結果、実際の走行経路は経路AB1であるのか経路AB2であるのか判定することができなくなってしまう。このような場合、センタシステムは、例えば、主要道路又は幹線道路を優先的に走行経路として選択する。したがって、経路AB2が走行経路として記録されることになる。そうすると、実際には経路AB1を走行した車両については、誤った走行経路が記録されてしまうことになる。すなわち、単位距離の間に複数の経路が存在する場合、必ずしも正しい走行経路が記録されるとは限らない。
【0007】
斯かる問題を回避するため、単位距離を短くすることが考えられる。しかし、単位距離を短くすると、走行経路の精度向上が図られる半面、走行履歴データのデータ量が増加し、車載機の記憶容量が飽和状態になる可能性が高まる。また、走行履歴データのデータ量の増加は、車両がビーコンの通信範囲を通過する限られた時間内に、全ての走行履歴データのアップリンクを困難にするという問題もある。
【0008】
ここで、ロッシー方式による圧縮方式を用いて走行履歴データを圧縮すると、データ量を削減することができる。但し、ロッシー方式の場合、圧縮データを解凍しても元データを完全に復元することができないため、走行履歴データの精度が劣化してしまう。そのため、解凍した復元後の走行履歴データにおいて、GPS(Global Positioning System)測定精度誤差以上の位置誤差が発生してしまい、実際の走行経路が相違してしまう可能性がある。
【0009】
本発明は、上記の点に鑑みてなされたものであって、記録される走行履歴データのデータ量の増加を抑制しつつ、精度の高い走行経路の判定を可能とすることのできる車載機及びプログラムの提供を目的とする。
【課題を解決するための手段】
【0010】
そこで上記課題を解決するため、車載機は、位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、前記記録手段に記録された情報を送信する送信手段とを有する。
【発明の効果】
【0011】
開示された装置又はプログラムによれば、記録される走行履歴データのデータ量の増加を抑制しつつ、精度の高い走行経路の判定を可能とすることができる。
【図面の簡単な説明】
【0012】
【図1】正確な走行経路が判定できない例を説明するための図である。
【図2】本発明の実施の形態における車載機のハードウェア構成例を示す図である。
【図3】制御部のハードウェア構成例を示す図である。
【図4】制御部の機能構成例を示す図である。
【図5】距離単位記録部による処理手順を説明するためのフローチャートである。
【図6】記録周期記憶部の構成例を示す図である。
【図7】走行履歴データ記憶部の構成例を示す図である。
【図8】進行方位単位記録部による処理手順を説明するためのフローチャートである。
【図9】ビーコン通過時に実行される処理手順を説明するためのフローチャートである。
【図10】本実施の形態による改善例を説明するための図である。
【発明を実施するための形態】
【0013】
以下、図面に基づいて本発明の実施の形態を説明する。図2は、本発明の実施の形態における車載機のハードウェア構成例を示す図である。車載機10は、一般的にカーナビ(カーナビゲーション)と呼ばれている電子機器である。同図において、車載機10は、制御部11、ビーコン信号送受信部12、GPSアンテナ部13、GPS時刻センサ14、速度センサ15、及びジャイロセンサ16等を有する。
【0014】
制御部11は、車載機10全体をプログラムによって制御する機能を有している。本実施の形態において、制御部11は、車載機10を搭載した車両(自動車)の走行履歴データの記録及び走行履歴データのビーコンへの送信等を行う。走行履歴データとは、所定のタイミングにおいて時刻、車両の位置情報等が記録されたデータをいい、一般的にプローブデータとも呼ばれている。ビーコンとは、道路に設置された機器(路側機)であり、車載機10より走行履歴データ等を受信したり、車載機10に対して交通情報、例えば、VICS情報等のデータを送信したりする機器である。ビーコンによって受信された走行履歴データは、非図示のセンタシステム(例えば交通管制センタ)に転送される。センタシステムは、収集された複数の走行履歴データに基づいて道路交通情報等を生成するコンピュータシステムである。
【0015】
ビーコン信号送受信部12は、ビーコンへのデータ(走行履歴データ等)の送信、又はビーコンからのデータの受信等を行う。GPSアンテナ部13は、GPS(Global Positioning System)衛星より受信される電波(以下、「GPS電波」という。)に基づいて、車両の位置情報(緯度経度)を算出し、位置情報を制御部11に入力する。GPS時刻センサ14は、GPS電波に含まれている時刻情報を制御部11に入力する。
【0016】
速度センサ15は、車両の走行速度(以下、単に「速度」という。)を検出し、速度情報を制御部11に入力する。速度センサ15による速度の検出は、GPS電波に基づいて行われてもよいし、車両に備えられている速度メータからの入力や車速パルスに基づいて行われてもよい。ジャイロセンサ16は、いわゆるジャイロスコープであり、車両の姿勢(方向)を検出する装置である。したがって、車両の走行中におけるジャイロセンサ16による検出値は、車両の進行方位(進行方向)を示す。
【0017】
図3は、制御部のハードウェア構成例を示す図である。制御部11は、CPU111、RAM112、ROM113、及びHDD114等を有する。ROM113には、各種のプログラムやプログラムによって利用されるデータ等が記録されている。RAM112は、プログラムをロードするための記憶領域や、ロードされたプログラムのワーク領域等として用いられる。CPU111は、RAM112にロードされたプログラムを処理することにより、各種の機能を実現する。HDD114には、プログラムやプログラムが利用する各種のデータ等が記録される。
【0018】
図4は、制御部の機能構成例を示す図である。同図において、制御部11は、走行距離演算部121、距離単位記録部122、進行方位単位記録部123、データ送信制御部124、データ削除部125、受信データ処理部126、記録周期記憶部131、及び走行履歴データ記憶部132等を有する。各部は、RAM112にロードされたプログラムがCPU111に実行させる処理により実現される。
【0019】
走行距離演算部121は、制御部11に入力される位置情報、速度情報、及び時刻情報等に基づいて車両の走行距離を算出する。但し、走行距離は、非図示の走行距離計(オドメータ)によって計測される値が用いられてもよい。
【0020】
距離単位記録部122は、所定の走行距離間隔(以下、「単位距離」という。)で走行履歴データを走行履歴データ記憶部132に記録する。進行方位単位記録部123は、ジャイロセンサ16を所定の周期(以下、「方位確認周期」という。)で確認する。進行方位単位記録部123は、ジャイロセンサ16によって検出される進行方位が所定量(以下、「単位方位」という。)以上変化したタイミングで走行履歴データを走行履歴データ記憶部132に記録する。走行履歴データ記憶部132は、HDD114又はRAM112において、走行履歴データを記憶する記憶領域である。単位距離、方位確認周期、及び単位方位は、記録周期記憶部131に記録されている。すなわち、記憶周期記憶部は、HDD114又はROM113において、単位距離、単位角度、及び単位方位を記憶する記憶領域である。
【0021】
データ送信制御部124は、走行履歴データ記憶部132に記録された走行履歴データをビーコンにアップリンク(送信)する。データ削除部125は、データ送信制御部124によって送信済みの走行履歴データを走行履歴データ記憶部132より削除する。受信データ処理部126は、ビーコンより受信される更新データ等に基づく処理制御を行う。本実施の形態において、受信データ処理部126は、単位距離の変更指示を受信し、当該変更指示を距離単位記録部122に通知する。
【0022】
以下、車載機10の処理手順について説明する。図5は、距離単位記録部による処理手順を説明するためのフローチャートである。
【0023】
車載機10の起動に応じ、距離単位記録部122は、単位距離の値を記録周期記憶部131より取得する(S101)。
【0024】
図6は、記録周期記憶部の構成例を示す図である。同図において、記録周期記憶部131には、単位距離、方位確認周期、及び単位方位の値が記録されている。同図の例では、単位距離の値は100(m)とされている。したがって、ステップS101では、「100」が単位距離の値として取得される。
【0025】
続いて、距離単位記録部122は、走行距離演算部121によって算出される走行距離に基づいて、単位距離ごとに走行履歴データを走行履歴データ記憶部132に記録する(S102、S103)。
【0026】
図7は、走行履歴データ記憶部の構成例を示す図である。同図において、走行履歴データ記憶部132は、時刻、緯度、経度、進行方位、道路種別、及び速度等を含む走行履歴データが記録されている。同図の一行分が一回に記録される走行履歴データ(すなわち、一つの走行履歴データ)に相当する。
【0027】
時刻は、走行履歴データが記録された時刻である。図中における、「hh:mm:ss」は、実際には具体的な時分秒を示す。緯度及び経度は、走行履歴データ記録時における車両の位置情報である。当該位置情報は、GPSアンテナ部13より入力される。進行方位情報は、走行履歴データ記録時におけるジャイロセンサ16による検出値である。本実施の形態では、単位方位を22.5度としているため、記録される進行方位の分解能は、16方位で区別されている。また、同図では、東西南北を用いて進行方位が記録されているが、角度によって進行方位が記録されてもよい。道路種別は、走行履歴データ記録時において車両が走行していた道路の種別である。道路種別は、車両の位置情報を非図示の地図データに当てはめることにより判別される、なお地図データは、例えば、HDD114に記録されている。速度は、走行履歴データ記録時における車両の速度である。当該速度は、速度センサ15より入力される。
【0028】
図5の処理が実行されることにより、走行履歴データは、車両が単位距離(例えば、100m)走行するたびに走行履歴データ記憶部132に記録される。但し、距離単位記録部122のみでは、100m以内における走行経路を判別できない場合がある。そこで、進行方位単位記録部123は、図8に示される処理を実行する。
【0029】
図8は、進行方位単位記録部による処理手順を説明するためのフローチャートである。
【0030】
車載機10の起動に応じ、進行方位単位記録部123は、方位確認周期及び単位方位の値を記録周期記憶部131より取得する(S201)。図6の例では、方位確認周期は1秒、単位方位は22.5度とされている。ステップS201では、これらの値が取得される。
【0031】
続いて、進行方位単位記録部123は、方位確認周期ごと(1秒ごと)にステップS203〜S205を実行する(S202)。方位確認周期の経過は、GPS時刻センサ14より入力される時刻情報に基づいて判定される。
【0032】
ステップS203において、進行方位単位記録部123は、走行履歴データ記憶部132に記録されている走行履歴データのうち、前回(最後又は最近に)記録された走行履歴データの進行方位に関する情報の値(前回の進行方位)を取得する。続いて、進行方位単位記録部123は、現時点におけるジャイロセンサ16による検出値(今回の進行方位)をジャイロセンサ16より取得する(S204)。続いて、進行方位単位記録部123は、前回の進行方位と今回の進行方位との差分が、単位進行方位以上(22.5度以上)であるか否かを判定する(S205)。当該差分が単位進行方位以上である場合(S205でYes)、進行方位単位記録部123は、現時点に係る走行履歴データを走行履歴データ記憶部132に記録する(S206)。一方、当該差分が単位進行方位未満である場合(S205でNo)、走行履歴データの記録は行われない。
【0033】
上記図5及び図8の処理が並列的に実行されることにより、車両が100m走行するごとに、かつ、車両の進行方向が単位進行方向以上変化するたびに走行履歴データが記録される。但し、進行方位単位記録部123によって走行履歴データが記録された場合に、距離単位記録部122による単位距離の計測は初期化されるようにしてもよい。具体的には、単位距離分走行したか否かは、進行方位単位記録部123によって走行履歴データが記録されたときから、計測されるようにしてもよい。この場合、例えば、進行方位単位記録部123は、走行履歴データを記録したときに、距離単位記録部122に走行履歴データを記録したことを通知すればよい。単位距離データ記録部は、当該通知に応じて、計測中の走行距離を0(ゼロ)にリセットすればよい。
【0034】
また、本実施の形態において、単位進行方位を22.5度としているのは、道路の分岐点(交差点又はT字路等)における車両の右折又は左折以外の進行方位の変化を無視するためである。すなわち、車線変更等や蛇行によってもジャイロセンサ16は進行方位の変化を検出する。一方、一般的に、22.5度より鋭角な道路の分岐は少ないと考えられる。そこで、22.5度以上の進路変更時に走行履歴データを記録することにより、走行履歴データの不必要な増加を抑制することが可能になる。但し、このことは、単位進行方位が22.5度に限定されることを意味するものではない。22.5度より鋭角な分岐が存在する場合は、単位進行方位をより小さく(鋭角に)すればよい。なお、単位進行方位を小さくすることにより、車線変更時等において走行履歴データが記録されたとしても、単にデータ量が増加するだけであり、走行経路の精度が劣化するということはない。
【0035】
また、方位確認周期を1秒としているのは、ジャイロによって検出される進行方位を確認する周期(タイミング)が、車両が単位距離の走行に要する時間(単位距離に基づくタイミングによって走行履歴データが記録される周期)よりも短くするためである。すなわち、進行方位単位記録部123によって記録される走行履歴データは、距離単位記録部122によって記録される走行記録データの精度を補うためのものである。それにも拘わらず進行方位単位記録部123による記録周期の方が長くなってしまうと、距離単位記録部122によって記録される走行履歴データの精度を補うことができない可能性が有るからである。したがって、例えば、方位確認周期を速度に応じて変化させてもよい。速度が増加したときは方位確認周期を短くし、速度が減少したときは方位確認周期を長くするようにしてもよい。
【0036】
なお、進行方位単位記録部123による進行方位の変化の検知は、進行方位単位記録部123がジャイロの検出値をポーリングすることによって行われるPULL型でなくてもよい。例えば、ジャイロセンサ16から進行方位単位記録部123に検出値が入力されるPUSH型が採用されてもよい。この場合、方位確認周期ではなく、検出値が変化するたびに前回の進行方位と今回の進行方位との差分が判定されればよい。
【0037】
また、図5又は図8の処理によって記録される走行履歴データは、ロスレス方式の圧縮方式によって圧縮して走行履歴データ記憶部132に記録するようにするとよい。ロスレス方式であれば、圧縮前の情報を完全に復元することができる。したがって、走行履歴データの精度が劣化してしまうことはない。但し、ロスレス方式の場合、ロッシー方式に比べて圧縮率は低い。その結果、圧縮後のデータ量は大きくなる。しかし、本実施の形態による走行履歴データの記録方法によれば、単に単位距離を短くする場合に比べて走行履歴データの記録量を抑制することができる。したがって、ロスレス方式を採用することによるデータ量の増加をさらに緩和することができる。
【0038】
続いて、車両がビーコンを通過する際に実行される処理について説明する。図9は、ビーコン通過時に実行される処理手順を説明するためのフローチャートである。
【0039】
道路に設置されたビーコンより発信(ダウンリンク)されている光(赤外線)又は電波がビーコン信号送受信部12によって検知されると(S301)、受信データ処理部126は、当該光又は電波を介してデータ記録周期情報をビーコンよりダウンリンク(受信)する(S302)。データ記録周期情報は、走行履歴データの記録周期(単位距離)の変更指示を含む情報である。本実施の形態において、単位距離の初期値は100mであるが、例えば、200mに変更すべき旨の指示がデータ記録周期情報に含まれている。
【0040】
続いて、データ送信制御部124は、走行履歴データ記憶部132に記録(蓄積)されている走行履歴データをビーコンにアップリンク(送信)する(S303)。なお、走行履歴データに含まれている全ての項目の値がアップリンクされなくてもよい。例えば、進行方位、道路種別、及び速度はアップリンクされなくてもよい。一方、毎回記録される走行履歴データに含まれていない情報(例えば、車長情報)がアップリンクの対象とされてもよい。なお、上記したように、本実施の形態では、単位距離を短くする場合に比べて走行履歴データのデータ量は削減されている。したがって、走行履歴データのアップリンクが完了する前に車両がビーコンの通信範囲を通過してしまうという可能性が低減される。
【0041】
続いて、データ削除部125は、アップリンクされた走行履歴データを走行履歴データ記憶部132より削除する(S304)。アップリンク済みの走行履歴データが削除されることにより、記憶領域の飽和の可能性を低減させることができる。なお、ビーコンに送信された走行履歴データは、センタシステムに転送され、道路交通情報の入力情報として処理される。
【0042】
続いて、受信データ処理部126は、受信されたデータ記録周期情報に含まれている単位距離を距離単位記録部122に通知し、単位距離の設定を変更する(S305)。距離単位記録部122は、以降において、通知された単位距離に基づいて走行履歴データの記録を行う。
【0043】
単位距離データを変更することにより、事情に応じた走行履歴データの記録が可能となる。例えば、ビーコンの少ない地域においては、単位距離を長くすることにより、ビーコン間において記録される走行履歴のデータ量を削減することができる。なお、単位距離データの変更は必須の処理ではない。単位距離データを初期値のまま変更しない場合には、ステップS302及びS305を省略することが可能である。
【0044】
上述したように、本実施の形態における車載機10によれば、進行方位単位記録部123によって車両の進行方位が変化するたびに走行履歴データが記録される。したがって、交差点やT字路等の曲がり角において、走行履歴データが記録される。その結果、図1に示した状況は、図10に示されるように改善される。
【0045】
図10は、本実施の形態による改善例を説明するための図である。同図中、図1と同一部分には同一符号を付している。
【0046】
同図において、地点A及びBでは、距離単位記録部122によって走行履歴データが記録される。また、地点P1、P2、及びP3では、車両の進行方位の変化に応じて進行方位単位記録部123によって走行履歴データが記録される。その結果、地点A及びBの間では、経路AB1が利用されたことが判別可能となる。
【0047】
したがって、都市部のように複数の道路が密集しており、単位距離間に複数の経路が存在している場合やビーコンの設置が少ない地域であっても、実際に車両が走行した経路を導出可能な走行履歴データを記録することができる。その結果、センタシステム側においては、精度の高いマップマッチングを行うことが可能となり、道路交通情報の精度を向上させることができる。例えば、マップマッチングの精度が向上することにより、ロスレス方式によって精度が維持された走行履歴データに含まれる車長情報等に基づいて渋滞長の計測(推測)の精度を向上させることも可能となる。
【0048】
また、単位距離を長くしたとしても、進行方位が変化した地点が明確であれば、精度の高い走行経路を導出することができる。したがって、本実施の形態の車載機10によれば、単位距離を長くすることにより、距離単位記録部122によって記録される走行履歴データのデータ量を削減することも可能である。
【0049】
以上、本発明の実施例について詳述したが、本発明は斯かる特定の実施形態に限定されるものではなく、特許請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。
【0050】
以上の説明に関し、更に以下の項を開示する。
(付記1)
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、
前記記録手段に記録された情報を送信する送信手段とを有する車載機。
(付記2)
前記第二の記録手段は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する付記1記載の車載機。
(付記3)
前記送信手段によって送信された情報を前記記憶手段より削除する削除手段を有する付記1又は2記載の車載機。
(付記4)
さらに、通信網を介して他コンピュータからの信号を受信する受信手段を有し、
前記第一の記録手段は、前記受信手段により受信された情報に基づいて、前記所定の走行距離間隔を変化させる付記1乃至3いずれか一項記載の車載機。
(付記5)
車載機に、
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手順と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手順と、
前記記録手段に記録された情報を送信する送信手順とを実行させるためのプログラム。
(付記6)
前記第二の記録手順は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する付記5記載のプログラム。
(付記7)
前記送信手順において送信された情報を前記記憶手段より削除する削除手順を有する付記5又は6記載のプログラム。
(付記8)
前記第一の記録手順は、通信網を介して他コンピュータから受信した情報に基づいて、前記所定の走行距離間隔を変化させる付記5乃至7いずれか一項記載のプログラム。
【符号の説明】
【0051】
10 車載機
11 制御部
12 ビーコン信号送受信部
13 GPSアンテナ部
14 GPS時刻センサ
15 速度センサ
16 ジャイロセンサ
111 CPU
112 RAM
113 ROM
114 HDD
121 走行距離演算部
122 距離単位記録部
123 進行方位単位記録部
124 データ送信制御部
125 データ削除部
126 受信データ処理部
131 記録周期記憶部
132 走行履歴データ記憶部
【特許請求の範囲】
【請求項1】
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、
前記記録手段に記録された情報を送信する送信手段とを有する車載機。
【請求項2】
前記第二の記録手段は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する請求項1記載の車載機。
【請求項3】
前記送信手段によって送信された情報を前記記憶手段より削除する削除手段を有する請求項1又は2記載の車載機。
【請求項4】
さらに、通信網を介して他コンピュータからの信号を受信する受信手段を有し、
前記第一の記録手段は、前記受信手段により受信された情報に基づいて、前記所定の走行距離間隔を変化させる請求項1乃至3いずれか一項記載の車載機。
【請求項5】
車載機に、
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手順と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手順と、
前記記録手段に記録された情報を送信する送信手順とを実行させるためのプログラム。
【請求項1】
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手段と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手段と、
前記記録手段に記録された情報を送信する送信手段とを有する車載機。
【請求項2】
前記第二の記録手段は、前記所定の走行距離間隔の走行に要する時間よりも短い時間間隔で前記進行方位検出手段による検出値を確認し、前記検出値に基づいて前記所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻情報を前記記憶手段に記録する請求項1記載の車載機。
【請求項3】
前記送信手段によって送信された情報を前記記憶手段より削除する削除手段を有する請求項1又は2記載の車載機。
【請求項4】
さらに、通信網を介して他コンピュータからの信号を受信する受信手段を有し、
前記第一の記録手段は、前記受信手段により受信された情報に基づいて、前記所定の走行距離間隔を変化させる請求項1乃至3いずれか一項記載の車載機。
【請求項5】
車載機に、
位置情報検出手段によって検出される車両の位置情報と時刻計測手段によって計測される時刻情報とを所定の走行距離間隔で記憶手段に記録する第一の記録手順と、
進行方位検出手段によって所定量以上の前記車両の進行方位の変化が検出されたときに前記位置情報及び前記時刻を前記記憶手段に記録する第二の記録手順と、
前記記録手段に記録された情報を送信する送信手順とを実行させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−48611(P2011−48611A)
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願番号】特願2009−196326(P2009−196326)
【出願日】平成21年8月27日(2009.8.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願日】平成21年8月27日(2009.8.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]