
車載無線データ通信制御装置および無線データ通信制御装置
【課題】 無線通信装置を用いて基地局と無線接続することによって、データ通信を行うカーナビゲーション装置1、無線接続ができない旨の通知を行うタイミングを、車速および電波環境に応じて制御する。
【解決手段】 カーナビゲーション装置1は、電波環境が通信圏内状態の場合においては、車両が停止しているか走行しているか、通信モジュール2の電波環境が弱電界状態か中・強電界状態か、および設定テーブルに基づいて、リトライ回数、接続監視時間、リトライ間隔を決定する。そして、無線接続が不能である旨の通知をする前に、[リトライ回数+1]回だけ無線接続を試み、また1回の無線接続の試みにおいては接続監視時間を限度として無線接続の成功を待ち、また1回の無線接続の試みが不成功となった後、無線接続の試みを再度行うまでにリトライ間隔分だけ待つ。
【解決手段】 カーナビゲーション装置1は、電波環境が通信圏内状態の場合においては、車両が停止しているか走行しているか、通信モジュール2の電波環境が弱電界状態か中・強電界状態か、および設定テーブルに基づいて、リトライ回数、接続監視時間、リトライ間隔を決定する。そして、無線接続が不能である旨の通知をする前に、[リトライ回数+1]回だけ無線接続を試み、また1回の無線接続の試みにおいては接続監視時間を限度として無線接続の成功を待ち、また1回の無線接続の試みが不成功となった後、無線接続の試みを再度行うまでにリトライ間隔分だけ待つ。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載無線データ通信制御装置および無線データ通信制御装置に関するものである。
【背景技術】
【0002】
従来、携帯電話等、無線環境を利用したデータ通信が広く利用されてきている。無線通信を利用したデータ通信としては、例えば車載の通信データ通信装置において、PPP(Piont to Point Protocol)によるダイヤルアップ接続が用いられている。このようなデータ通信においては、無線通信の基地局からの電波の強弱や干渉波の有無等、様々な要因によって、基地局と無線通信の端末との間の無線接続の確立が素早く完了したり、なかなか完了しなかったりする場合がある。
【0003】
通常、無線接続に失敗したときは、無線接続のリトライを実施する。リトライとは、無線接続の試みを、無線接続ができない旨の通知をユーザに行う前に繰り返すことをいう。このリトライにおいては、接続ができない旨の通知を行うまでに試みる無線接続の回数のうち、最初の無線接続の試みを除いたものの回数をリトライ回数と呼び、このリトライにおける無線接続の試みの時間間隔をリトライ間隔と呼び、1回の接続の試みにおいて、接続成功を待てる限度時間を接続監視時間と呼ぶ。これらリトライ回数、リトライ間隔、接続監視時間といった量は、無線接続ができない旨の通知を行うタイミングに影響するパラメータ(以下リトライパラメータと記す)である。
【0004】
従来技術では、この、リトライパラメータは、固定値となっている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、車載の無線データ通信装置において、このようにリトライパラメータが固定値となっていると、いくつかの問題があると考えられる。
【0006】
例えば、接続の試みを開始してから接続できない旨の通知があるまで待つことに対する、運転者のイライラ感は、車両の走行中に比べ、車両の停止中の方がより強い。このような場合にも、車両の走行中と停止中との間で上記リトライのパラメータが変化しないことは、運転者のイライラ感の低減という観点においては不都合である。
【0007】
また、例えば接続の試みを実施しようとした時に、車両がたまたま通信圏外、すなわち基地局との通信可能範囲外にあった場合、接続が不可能であることが明らかであるにも関わらず、通信圏内にいる場合と同様にリトライを行うことは、効率的であるとは言えない。
【0008】
本発明は、上記点に鑑み、無線通信装置を用いて他の無線通信装置と無線接続することによって、データ通信を行う車載無線データ通信制御装置において、無線接続ができない旨の通知を行うタイミングを、車速に応じて制御することを第1の目的とする。
【0009】
また、無線通信装置を用いて他の無線通信装置と無線接続することによって、データ通信を行う無線データ通信制御装置において、無線接続ができない旨の通知を行うタイミングを、当該無線通信装置の電波環境に応じて制御することを第2の目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1に記載の発明は、無線通信装置(2)を用いて他の無線通信装置(4)と無線接続することによってデータ通信を行う車載無線データ通信制御装置であって、前記無線接続が不能である旨の通知を、前記無線通信装置(2)の電波環境の状態に基づいたタイミングで行う通知手段(310〜450、510〜590)を備えた車載無線データ通信制御装置である。
【0011】
これによって、他の通信装置と無線通信によって接続することによってデータ通信を行う車載無線データ通信制御装置は、通知手段によって、前記無線接続が不能である旨の通知を、無線通信装置の電波環境の状態に基づいたタイミングで行うので、無線接続ができない旨の通知を行うタイミングを、当該無線通信装置の電波環境に応じて制御することができる。
【0012】
なお、車両の走行速度に関する情報とは、車両が停止しているか否かの情報も含む概念である。
【0013】
また、請求項2に記載の発明は、請求項1に記載の車載無線データ通信制御装置であるにおいて、前記通知手段は、前記電波環境の状態に基づいた回数だけ前記無線接続の試みを行った後に、前記無線接続ができない旨の通知を行うことを特徴とする。
【0014】
また、請求項3に記載の発明は、請求項2に記載の車載無線データ通信制御装置において、前記通知手段の、前記無線接続ができない旨の通知を行うまでに行う接続の試みの回数は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が少ないことを特徴とする。
【0015】
また、請求項4に記載の発明は、請求項1ないし3のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいた時間間隔で、前記無線接続ができない旨の通知を行うまで接続の試みを繰り返すことを特徴とする。
【0016】
また、請求項5に記載の発明は、請求項1ないし4のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいた限度時間だけ、1回の前記無線接続の試みにおいて前記無線接続の成功を待つことを特徴とする。
【0017】
また、請求項6に記載の発明は、請求項5に記載の車載無線データ通信制御装置において、前記通知手段の、前記1回の接続の試みにおいて前記無線接続の成功を待てる限度時間は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が短いことを特徴とする。
【0018】
また、請求項7に記載の発明は、請求項1ないし6のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいて、前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を決定することを特徴とする。
【0019】
また、請求項8に記載の発明は、請求項1ないし7のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記無線通信装置(2)の電波環境の状態が圏外状態であるときは、前記無線接続の試みを行わずに、前記無線接続ができない旨の通知を行うことを特徴とする。
【0020】
また、請求項9に記載の発明は、請求項1ないし8のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、再度の前記無線接続の試みの前に、前記決定した前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を変更することを特徴とする。
【0021】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段、または具体的手段として下記制御回路18のCPUを機能させるためのソフトウェアの処理との対応関係を示すものである。
【発明を実施するための最良の形態】
【0022】
(第1実施形態)
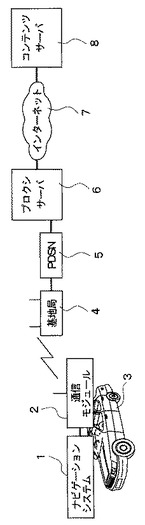
図1に、本発明の第1実施形態において説明するダイヤルアップ通信システムの概要図を示す。車両3に搭載されたカーナビゲーション装置1(車載無線データ通信制御装置に相当する)は、通信モジュール2を用いて無線通信の基地局4と無線接続を確立し、データ通信のデータと音声通信のデータとを振り分けるPDSN(Packet Data Serving Node)5、プロクシサーバ6を介して、コンテンツサーバ8等のインターネット7上のデータ通信機器とデータの授受を行う。カーナビゲーション装置1が通信モジュール2を用いて行う基地局4との無線接続の確立のためのプロトコルとしては、PPPを用いる。
【0023】
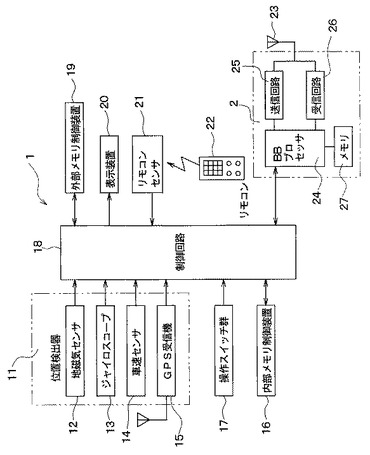
図2に、このカーナビゲーション装置1および通信モジュール2の構成を示す。通信モジュール2は、CDMA(Code Division Multiple Access)、PDC(Personal Digital Cellular)等の通信方式を用いた無線通信を行うことができるようになっており、アンテナ23、ベースバンドプロセッサ24、受信回路25、送信回路26、およびメモリ27を有している。
【0024】
受信回路25は、アンテナ23が受信した信号に対して増幅、周波数変換、復調、A/D変換等を施し、その結果をベースバンドプロセッサ24に出力する。
【0025】
送信回路26は、ベースバンドプロセッサ24から入力されたデータに対してD/A変換、変調、周波数変換、増幅等を施し、その結果の信号をアンテナ23に出力する。
【0026】
メモリ27は、図示しないRAM、ROM、EEPROMから成り、ベースバンドプロセッサ24からの制御信号に基づいて、RAM、ROM、EEPROMの記憶領域からデータを読み出してアンテナ23に出力し、あるいはベースバンドプロセッサ24から入力されたデータをRAM、EEPROMに書き込む。
【0027】
ベースバンドプロセッサ24は、例えば回路構成がプログラム可能となっているFPGA(Field Programmable Gate Array)から成り、受信回路25から入力された信号に対して、当該プログラムされた回路構成に基づく処理を施し、その結果のデータをセキュリティ制御回路18に出力し、またセキュリティ制御回路18から入力されたデータに対して、当該プログラムされた回路構成に基づく処理を施し、その結果のデータを送信回路26に出力する。またベースバンドプロセッサ24は、上記処理の必要に応じて、メモリ27のROM、RAM、EEPROMに対して情報の書き込み、読み出しのための制御信号を出力する。
【0028】
本実施形態におけるベースバンドプロセッサ24の具体的処理としては、受信回路25から受信したデータに対して、用いる通信方式に則った復調処理(例えば逆拡散、QPSK復調等)等の処理を施し、その結果のデータを制御回路18に出力する。またベースバンドプロセッサ24は、制御回路18から無線送信のために入力されたデータに対して、用いる通信方式に則った変調処理等の処理を施し、その結果のデータを送信回路26に出力する。
【0029】
またベースバンドプロセッサ24は、受信回路25から入力され、復調を行ったデータを元に、受信電波の強度(以下受信電界強度と記す)の値を定期的に算出し、この算出した値を制御回路18に出力する。またベースバンドプロセッサ24は、受信回路25から入力され、復調を行ったデータを元に、基地局4から送出された信号に係る電波の受信強度と、他のノイズ電波等を含めた全受信電波の強度の比の値(以下信号強度比と記す)を定期的に算出し、算出した値を制御回路18に出力する。信号強度比の例としては、例えばCDMAにおいては、パイロットエネルギーの、受信帯域内送電力スペクトル密度に対する比率であるEc/Io値がある。
【0030】
またベースバンドプロセッサ24は、制御回路18からデータ通信のための接続を行う旨の制御信号の入力があると、基地局4との無線接続の確立のための通信を行う。例えば、制御回路18から、ATコマンド群の一部であるATDコマンド入力があると、基地局4との通信を開始するための信号を受信回路25に出力し、以後はPPP(Point to Point Protocol)等による無線接続のためのやり取りのデータを、受信回路25および送信回路26を介して基地局4と交換し合う。
【0031】
カーナビゲーション装置1は、位置検出器11、内部メモリ制御装置16、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21およびこれらに接続された制御回路18を備えている。
【0032】
表示装置20は、液晶ディスプレイ等の表示面およびスピーカを有し、制御回路18からの映像信号の入力に応じて液晶ディスプレイ等の表示面に当該映像を表示し、また制御回路18からの音声信号の入力に応じてスピーカに当該音声を出力させる。
【0033】
操作スイッチ群17は、表示装置20の表示面の周囲に設けられた複数のメカニカルスイッチ、当該表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの押下(例えば押しボタンの押下)、タッチパネルのタッチに基づいた信号を制御回路18に出力する。
【0034】
リモコンセンサ21は、ユーザの操作に基づいて赤外線等による無線信号を送信するリモコン22から受信した信号を制御回路18に出力する。
【0035】
位置検出器11は、いずれも周知の地磁気センサ12、ジャイロスコープ13、車速センサ14、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有し、これらのセンサ等12〜15の検出に基づいた現在位置情報を制御回路18に出力する。これらのセンサ等12〜15は各々が性質の異なる誤差を持っているため、複数のセンサを相補的に使用するように構成されている。なお精度によっては上述した内の一部で構成されていてもよく、更に図示しないステアリングの回転センサ、各駆動輪の車輪センサ等を有していてもよい。
【0036】
内部メモリ制御装置16は、HDD(ハードディスクドライブ)等の不揮発性記憶媒体を備え、制御回路18からの制御命令等に基づいて、この不揮発性記憶媒体に対してデータの読み出しおよび可能であればデータの書き込みの制御を行う。この不揮発性記憶媒体が記憶している情報としては、上記した位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データおよび目印データを含む各種データ、カーナビゲーション装置1の動作のためのプログラム、および後述する設定テーブル等がある。
【0037】
外部メモリ制御装置19は、DVD−ROM、メモリスティック、メモリカード等の外部記憶媒体に対して、データの読み出しおよび可能であればデータの書き込みの制御を行う。上記外部記憶媒体が記憶している情報としては、上記した内部メモリ制御装置16の制御する記憶媒体が有するマップマッチング用データ、地図データおよび目印データ等に対する追加データ等がある。
【0038】
制御回路18は、通常のコンピュータとして構成されており、内部にはCPU、ROM、RAM、フラッシュメモリ、I/Oおよびこれらの構成を接続するバスラインが備えられている。制御回路18は、ROM、外部メモリ制御装置19から読み出したカーナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはROM、RAM、フラッシュメモリから情報を読み出し、RAM、フラッシュメモリに対して情報の書き込みを行い、I/Oを介して位置検出器11、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21等と信号の授受を行う。
【0039】
この制御回路18のCPUは、カーナビゲーション装置1が起動するとき、ROMからブートプログラム、オペレーティングシステム(以下OSと記す)等を読み出して実行し、このOSに基づいたハードウェア制御およびプロセス管理を行う。OS上で動作するプロセスとしては、メニュープログラム、経路探索プログラム、地図表示プログラム、データ通信プログラム、接続制御プログラム、およびその他のプログラムがある。
【0040】
以下では、当該CPUがプログラムを読み込んで実行する動作を、当該実行されるプログラムの動作であるとみなして説明する。
【0041】
メニュープログラムは、OS上で動作する各種プログラムを、そのプログラムの機能や目的別に階層的にメニュー表示し、そのメニュー表示されたものの中からユーザが選択したプログラムの実行を開始させる。なお、メニュー表示は表示装置20の表示面に当該メニューの画像データを出力することで行い、また、ユーザの選択は、リモコンセンサ21を介したリモートコントロール端末(以下リモコンと称する)22または操作スイッチ群17に対する選択操作(カーソル移動、確定ボタン押下等)によって制御回路18に入力された信号に基づいて検出する。
【0042】
経路探索プログラムは、リモコン22により、あるいは操作スイッチ群17により目的地の位置が入力されると、現在位置からその目的地までの最適な経路を自動的に選択して誘導経路を形成し表示装置20に表示させる。自動的に最適な経路を設定する手法としては、ダイクストラ法等が知られている。
【0043】
地図表示プログラムは、位置検出器11から入力された現在位置情報に基づく車両現在位置マークと、外部メモリ制御装置19より読み出した地図データと、経路探索プログラムによって形成した誘導経路等の付加データとを重ねてその表示装置20の表示面に表示させる。
【0044】
データ通信プログラムは、通信モジュール2を介してインターネット7上の他の機器とデータ通信を行うためのプログラムである。データ通信プログラムとしては、例えば、Web閲覧プログラム、e−mail送受信プログラムがある。なお、データ通信プログラムは、通信モジュール2と基地局4との無線接続が確立されていない場合は、接続制御プログラムを起動する。
【0045】
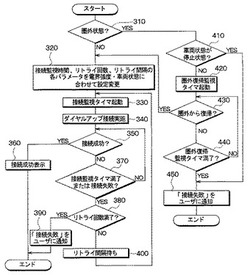
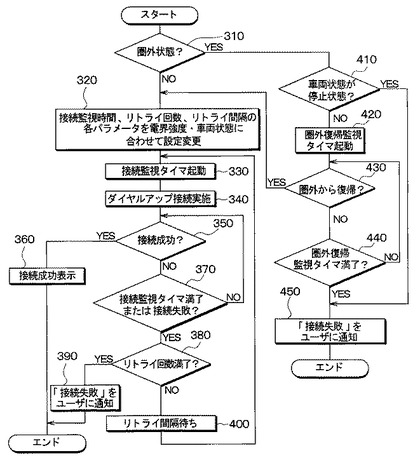
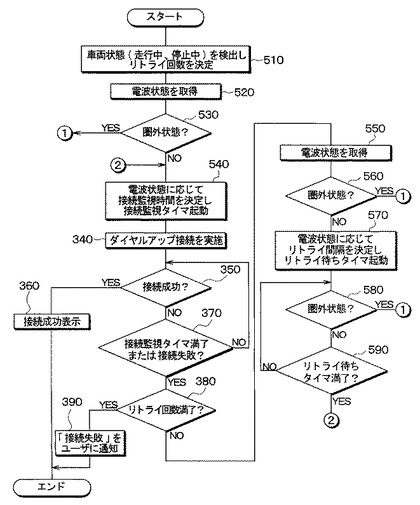
接続制御プログラムは、上記データ通信プログラムによって起動されると、通信モジュール2を用いて、無線通信の基地局4とのPPP接続を確立するための動作を行う。図3に、この接続制御プログラムのフローチャートを示す。
【0046】
まず、ステップ310では、通信モジュール2の電波通信環境が、通信圏外状態であるか否かを判定する。具体的には、基地局4からの電波の信号強度比が、所定の値(例えば−16dB)より大きいときは通信圏内であると判定し、所定の値より小さいときは通信圏外であると判定する。なお、基地局4からの電波の受信強度と他のノイズ電波等の受信強度の比は、通信モジュール2から出力されたものを用いる。
【0047】
通信圏外である場合は、処理はステップ410に進み、通信圏内である場合は、処理はステップ320に進む。
【0048】
ステップ320では、リトライ回数、リトライ間隔、接続監視時間の、各リトライパラメータを通信モジュール2の電波環境の状態、車両1の走行速度に基づいて設定変更する。電波環境の状態とは、具体的には、圏外状態、弱電界状態(例えば、圏内状態で、かつ受信電界強度が−90dBm未満の状態)、および中・強電界状態(例えば、圏内状態で、かつ受信電界強度が−90dBm以上の状態)の3つの状態のいずれに該当するかをいう。この電波環境の状態は、通信モジュール2が出力する、通信モジュール2における受信電界強度および信号強度比の情報に基づいて特定する。車速は、車速センサ14からの信号に基づいて特定する。車速については、車両3が停止しているか否かを特定する。
具体的には、特定した車速が所定の速度(例えば時速1km)以下であれば停車していると判定し、そうでないなら走行していると判定する。
【0049】
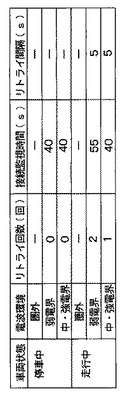
設定変更は、具体的には、図4に示す設定テーブルを内部メモリ制御装置16のHDDから読み出して参照することによって行う。この設定テーブルは、車両の走行速度(停車中または走行中)および電波環境(通信圏外、弱電界、または中・強電界)毎に設けられる複数のエントリから成るデータである。各エントリは、リトライ回数、接続監視タイマ、およびリトライ間隔の情報を要素として有する。図4の表の先頭行以外の各行が1つのエントリを表し、これら各行中の各セルが、それらエントリが有する情報の組の一要素を表している。
【0050】
例えば、図4中の7行目のエントリは、車両が走行中で電波環境が中・強電界状態に対応するエントリであり、このエントリが含む情報により、車両が停車中で電波環境が弱電界状態の場合は、リトライ回数は1回、接続監視時間は40秒、リトライ間隔は5秒と特定できる。
【0051】
なお、各エントリ中の要素には、空であることを示す情報が入っている場合がある。図4においては、空の情報が入っている要素に対応するセルには、横線(−)が記載されている。例えば、図4中の3行目のエントリは、車両が停車中で電波環境が弱電界状態に対応するエントリであり、このエントリが含む情報により、車両が停車中で電波環境が弱電界状態の場合は、リトライ回数は0回、接続監視時間は40秒、リトライ間隔は空と特定できる。リトライ間隔が空なのは、この場合におけるリトライ回数がゼロなので、リトライの間隔という概念が成立しないからである。
【0052】
なお、設定テーブル中に含まれる情報は、あらかじめ設定されているものであるが、ユーザによって変更可能となっていてもよい。
【0053】
ステップ320では、上記特定した電波環境の状態および車速に該当するエントリをこの設定テーブルから抽出し、そのエントリが含むリトライ回数、接続監視時間、およびリトライ間隔の値を、制御回路18のRAM中に、所定の変数として記録する。
【0054】
次にステップ330では、接続監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0055】
次にステップ340では、ダイヤルアップ接続を実行する。具体的には、通信モジュール2に対して基地局4にPPP接続するような制御信号(例えばATDコマンド)を出力する。
【0056】
次にステップ350では、接続が成功したか否かを判定する。これは通信モジュール2から、無線接続が成功した旨の信号(例えばATコマンドの規約に則ったCONNECTの文字列)を受信したか否かで判定する。接続が成功すると、処理はステップ360に進み、接続成功の旨を表示装置20に表示させ、その後処理は終了し、終了した後は通信プログラムによるアプリケーション層に係るデータの通信が行われる。
【0057】
ステップ350で接続が未だ成功していないと判定すると、処理はステップ370に進み、接続監視タイマ満了または接続失敗かを判定する。接続監視タイマ満了か否かは、直前のステップ330でRAMに記録した時刻と、現在時刻との差が、ステップ320で設定した接続監視時間より大きいか否かで判定する。また、接続失敗か否かは、車両3から、接続が失敗した旨の信号(例えば、ATコマンドの規約に則ったNO CARRIORの文字列)が出力されたか否かで判定する。接続監視タイマが満了せず、かつ接続失敗でもない場合は、処理はステップ350に戻る。接続監視タイマ満了または接続失敗の場合、処理はステップ380に進む。
【0058】
これによって、接続成功となって処理がステップ360に進むか、あるいは接続失敗または接続監視タイマ満了(すなわち接続不成功)となって処理がステップ380に進むまでは、ステップ350と370の判定処理が繰り返される。
【0059】
ステップ380では、リトライ回数が満了したか否かを判定する。具体的には、接続制御プログラムが起動してからダイヤルアップ接続を実行した回数が、[ステップ320で設定したリトライ回数+1]以上であるか否かを判定する。リトライ回数が満了している場合、処理はステップ390に進み、満了していない場合、処理はステップ400に進む。
【0060】
ステップ390では、接続失敗の旨を表示装置20に表示させる。そして処理は終了する。
【0061】
ステップ400では、リトライ間隔待ちを行う。具体的には、ステップ320で設定したリトライ間隔の時間が経過するまで待つ。そして、このリトライ間隔の時間が経過すると、処理はステップ330に戻る。
【0062】
以上のようなステップ310〜400の処理によって、接続制御プログラムは、通信モジュール2の電波環境が通信圏内状態の場合においては、車両3が停止しているか走行しているか、通信モジュール2の電波環境が弱電界状態か中・強電界状態か、および設定テーブルに基づいて、リトライパラメータの値を決定する(ステップ330)。そして、この決定したリトライパラメータに基づいたタイミングで無線接続が不能である旨の通知を行う。すなわち、無線接続が不能である旨の通知をする前に、[リトライ回数+1]回だけ無線接続を試み、また1回の無線接続の試みにおいては接続監視時間を限度として無線接続の成功を待ち、また1回の無線接続の試みが不成功となった後、無線接続の試みを再度行うまでにリトライ間隔分だけ待つ。なお、無線接続が成功した場合は、無線接続が不能である旨の通知を行わないのは当然である。
【0063】
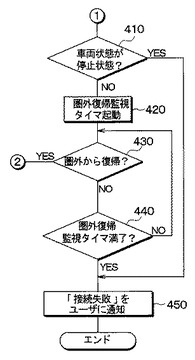
また、ステップ310で圏外であると判定した後の、ステップ410では、車両3の走行速度を特定し、車両3が停止状態か否かを判定する。車両3の走行速度の特定、および車両3が停止状態か否かの判定の具体的な手法は、ステップ320と同様である。車両が走行している場合、処理はステップ450に進み、車両が停止している場合、処理はステップ420に進む。
【0064】
ステップ420では、圏外復帰監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0065】
次にステップ430では、通信モジュール2の電波環境が、圏外状態から復帰したか否かを判定する。すなわち、通信モジュール2から出力される受信電界強度の情報に基づいて、通信モジュール2の電波環境が、弱電界状態、中・強電界状態のいずれかであるか否かを判定する。圏外状態から復帰したと判定すると、処理はステップ320に戻り、復帰していないと判定すると、処理はステップ440に進む。
【0066】
ステップ440では、圏外復帰監視タイマが満了したか否かを判定する。圏外復帰監視タイマ満了か否かは、直前のステップ420でRAMに記録した時刻と、現在時刻との差が、所定の圏外復帰監視タイマ値(例えば120秒)より大きいか否かで判定する。なお、所定の圏外復帰監視タイマ値は、あらかじめ決められている。圏外復帰監視タイマが満了すると、処理はステップ450に進み、満了していないと、処理はステップ430に戻る。
【0067】
これによって、圏外復帰となって処理がステップ320に進むか、あるいは圏外復帰監視タイマ満了となって処理がステップ450に進むまでは、ステップ430と440の判定処理が繰り返される。
【0068】
ステップ450では、ステップ390と同様、接続失敗の旨の表示を表示装置20に行わせる。そして処理は終了する。
【0069】
以上のようなステップ410〜450の処理によって、通信モジュール2の電波環境が通信圏外状態の場合には、車両が停止状態ならば直ちに接続が不能である旨を表示装置20を用いてユーザに通知し、また車両が走行状態ならば、無線接続が不能である旨の通知を行う前に、圏外復帰監視タイマ値の時間だけ、通信圏外から通信圏内に復帰することを待つ。そして、圏内に復帰した場合は、新たな車両の走行速度、および通信モジュール2の電波環境に基づいて、リトライパラメータを決定し、またこの新たな車両の走行速度、および通信モジュール2の電波環境に基づいたタイミングで無線接続が不能である旨の通知を行う。
【0070】
以上の様な接続制御プログラムの動作によって、カーナビゲーション装置1は、リトライパラメータを、車速検出手段が検出した車両の走行速度の情報、通信モジュール2の電波環境の状態、および設定テーブルに基づいて決定し、無線接続が不能である旨の通知を、車速検出手段が検出した車両の走行速度の情報、および通信モジュール2の電波環境の状態に基づいたタイミングで行うので、無線接続ができない旨の通知を行うタイミングを、車速に応じて制御することができる。
【0071】
また、図4の設定テーブルの表の通り、リトライ回数、接続監視時間の値は、車両の停車中よりも車両の走行中の方が大きい場合がある。これによって、車両停止時には、無線接続ができない旨の通知のタイミングが、車両走行時に比べて早いので、運転者のイライラ感を低減することができる。
【0072】
また、車両が走行中の場合、通信モジュール2が弱電界状態の場合よりも中・強電界状態の場合の方が、リトライ回数および接続監視時間の値が小さい。これは、中・強電界状態の場合に比べ、弱電界状態の場合は、無線接続が成功し難いので、通信不能の通知までのタイミングをより遅らせるようにするためである。
【0073】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なる部分は、制御回路18のCPUが実行する接続制御プログラムのみである。図5に、本実施形態における接続制御プログラムを示す。なお、図3と図5において同一の符号が付されたステップは、互いに同一の処理を行うものであり、ここではその詳細についての説明は省略する。
【0074】
まず、ステップ510では、車速および通信モジュール2の電波環境の状態に基づいて、リトライ回数を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境および車両の停止、走行のエントリに基づいて、リトライ回数を所定の変数として制御回路18のRAM中に記録する。
【0075】
次にステップ520では、通信モジュール2から、電波状態の情報を取得する。
【0076】
次にステップ530では、通信モジュール2の電波環境が圏外状態であるか否かを判定する。判定の具体的な手法は、図3のステップ310と同様である。圏外であると判定すると、処理は図6のステップ410に進み、圏外でないと判定すると、処理はステップ540に進む。
【0077】
ステップ540では、車速および通信モジュール2の電波環境の状態に基づいて、接続監視時間を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境および車両の停止、走行のエントリに基づいて、接続監視時間を所定の変数として制御回路18のRAM中に記録する。更に、接続監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0078】
ステップ540の後のステップ350〜390の処理は、図3の同符号の処理と同様である。ただし、ステップ370での、リトライ待ちタイマが満了したか否かの判定については、リトライ待ちタイマ満了か否かは、直前のステップ540でRAMに記録した時刻と、現在時刻との差が、ステップ540で設定した接続監視時間より大きいか否かで判定する。また、ステップ380でリトライ回数が満了していないと判定した場合、処理はステップ550に進む。
【0079】
ステップ550では、ステップ520と同様、通信モジュール2から電波状態の情報を取得する。
【0080】
次にステップ560では、ステップ530と同様、通信モジュール2の電波環境が圏外状態であるか否かを判定する。圏外状態である場合、処理は図6のステップ410に進み、圏外状態でない場合、処理はステップ570に進む。
【0081】
ステップ570では、電波環境の状態に基づいて、リトライ間隔を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境のエントリ(ただし、実際に車両3が走行中であると否とに関わらず、走行中の場合のエントリを使用する)に基づいて、リトライ間隔を所定の変数として制御回路18のRAM中に記録する。更に、リトライ待ちタイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0082】
次に、ステップ580では、ステップ530、560と同様、通信モジュール2が圏外状態であるか否かを判定し、圏外状態である場合、処理は図6のステップ410に進み、圏外状態でない場合、処理はステップ590に進む。
【0083】
ステップ590では、リトライ待ちタイマが満了したか否かを判定する。リトライ待ちタイマ満了か否かは、直前のステップ570でRAMに記録した時刻と、現在時刻との差が、ステップ570で設定したリトライ間隔より大きいか否かで判定する。リトライ待ちタイマが満了した場合、処理はステップ540に進み、リトライ待ちタイマが満了していない場合、処理はステップ580に戻る。
【0084】
これによって、圏外状態となって処理がステップ410に進むか、あるいはリトライ待ちタイマ満了となって処理がステップ540に進むまでは、ステップ580と590の判定処理が繰り返される。
【0085】
なお、図6のステップ430では、圏外から復帰したと判定すると、処理は図5のステップ540に進む。
【0086】
接続制御プログラムがこのようになっていることで、カーナビゲーション装置1は、無線接続が不成功に成った後(ステップ370のYesへの分岐に対応する)、再度の無線接続の試みの前に、先に決定したリトライパラメータの値を、新たな車両3の走行速度および通信モジュール2の電波環境状態に基づいて変更するようになっている。これによって、カーナビゲーション装置1は、第1実施形態の効果に加え、車速、電波環境の変動に柔軟に対応することができるようになる。ただし、リトライパラメータののうち、リトライ回数は固定としている。
【0087】
(第3実施形態)
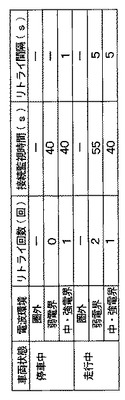
次に、本発明の第3実施形態について説明する。本実施形態が第2実施形態とで変化した部分は、内部メモリ制御装置16のHDD中の設定テーブルの、車両が停車状態で、かつ電波環境が中・強電界のエントリにおいて、リトライ回数が0回から1回に変化し、またリトライ間隔が1秒となったことのみである。このような場合の設定テーブルを図7に表として示す。
【0088】
このようになっていることで、リトライ間隔の値は、車両の停車中よりも車両の走行中の方が大きい場合がある。これによって、第1、第2実施形態の効果に加え、車両停止時には、無線接続ができない旨の通知のタイミングが、リトライ間隔が小さいことで、車両走行時に比べて早いので、運転者のイライラ感を低減することができる。
【0089】
なお、上記した各実施形態において、車両が停止しているか否かについては、車速センサ14ではなく、例えば車両3がドライブレンジ(P、R、D、L等)を検出するドライブレンジセンサを備え、このドライブレンジセンサから、ドライブレンジがP(駐車)の位置にあれば、車両は停止しており、それ以外の場合は、車両は停止していないと判定するようになっていてもよい。すなわち、車速検出手段は、車両の走行速度に関する情報を検出できれば、どのようなものであってもよい。
【図面の簡単な説明】
【0090】
【図1】本発明の第1実施形態において説明するダイヤルアップ通信システムの概要図である。
【図2】カーナビゲーション装置1および通信モジュール2の構成図である。
【図3】第1実施形態における接続制御プログラムのフローチャートである。
【図4】設定テーブルを示す図表である。
【図5】第2実施形態における接続制御プログラムの一部のフローチャートである。
【図6】第2実施形態における接続制御プログラムの一部のフローチャートである。
【図7】第3実施形態における設定テーブルを示す図表である。
【符号の説明】
【0091】
1…カーナビゲーション装置、2…通信モジュール、3…車両、4…基地局、
5…PDSN、6…プロクシサーバ、7…インターネット、8…コンテンツサーバ、
11…位置検出器、12…地磁気センサ、13…ジャイロスコープ、
14…車速センサ、15…GPS受信機、16…内部メモリ制御装置、
17…操作スイッチ群、18…制御回路、19…外部メモリ制御装置、
20…表示装置、21…リモコンセンサ、22…リモコン、23…アンテナ、
24…ベースバンドプロセッサ、25…受信回路、26…送信回路、27…メモリ。
【技術分野】
【0001】
本発明は、車載無線データ通信制御装置および無線データ通信制御装置に関するものである。
【背景技術】
【0002】
従来、携帯電話等、無線環境を利用したデータ通信が広く利用されてきている。無線通信を利用したデータ通信としては、例えば車載の通信データ通信装置において、PPP(Piont to Point Protocol)によるダイヤルアップ接続が用いられている。このようなデータ通信においては、無線通信の基地局からの電波の強弱や干渉波の有無等、様々な要因によって、基地局と無線通信の端末との間の無線接続の確立が素早く完了したり、なかなか完了しなかったりする場合がある。
【0003】
通常、無線接続に失敗したときは、無線接続のリトライを実施する。リトライとは、無線接続の試みを、無線接続ができない旨の通知をユーザに行う前に繰り返すことをいう。このリトライにおいては、接続ができない旨の通知を行うまでに試みる無線接続の回数のうち、最初の無線接続の試みを除いたものの回数をリトライ回数と呼び、このリトライにおける無線接続の試みの時間間隔をリトライ間隔と呼び、1回の接続の試みにおいて、接続成功を待てる限度時間を接続監視時間と呼ぶ。これらリトライ回数、リトライ間隔、接続監視時間といった量は、無線接続ができない旨の通知を行うタイミングに影響するパラメータ(以下リトライパラメータと記す)である。
【0004】
従来技術では、この、リトライパラメータは、固定値となっている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、車載の無線データ通信装置において、このようにリトライパラメータが固定値となっていると、いくつかの問題があると考えられる。
【0006】
例えば、接続の試みを開始してから接続できない旨の通知があるまで待つことに対する、運転者のイライラ感は、車両の走行中に比べ、車両の停止中の方がより強い。このような場合にも、車両の走行中と停止中との間で上記リトライのパラメータが変化しないことは、運転者のイライラ感の低減という観点においては不都合である。
【0007】
また、例えば接続の試みを実施しようとした時に、車両がたまたま通信圏外、すなわち基地局との通信可能範囲外にあった場合、接続が不可能であることが明らかであるにも関わらず、通信圏内にいる場合と同様にリトライを行うことは、効率的であるとは言えない。
【0008】
本発明は、上記点に鑑み、無線通信装置を用いて他の無線通信装置と無線接続することによって、データ通信を行う車載無線データ通信制御装置において、無線接続ができない旨の通知を行うタイミングを、車速に応じて制御することを第1の目的とする。
【0009】
また、無線通信装置を用いて他の無線通信装置と無線接続することによって、データ通信を行う無線データ通信制御装置において、無線接続ができない旨の通知を行うタイミングを、当該無線通信装置の電波環境に応じて制御することを第2の目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1に記載の発明は、無線通信装置(2)を用いて他の無線通信装置(4)と無線接続することによってデータ通信を行う車載無線データ通信制御装置であって、前記無線接続が不能である旨の通知を、前記無線通信装置(2)の電波環境の状態に基づいたタイミングで行う通知手段(310〜450、510〜590)を備えた車載無線データ通信制御装置である。
【0011】
これによって、他の通信装置と無線通信によって接続することによってデータ通信を行う車載無線データ通信制御装置は、通知手段によって、前記無線接続が不能である旨の通知を、無線通信装置の電波環境の状態に基づいたタイミングで行うので、無線接続ができない旨の通知を行うタイミングを、当該無線通信装置の電波環境に応じて制御することができる。
【0012】
なお、車両の走行速度に関する情報とは、車両が停止しているか否かの情報も含む概念である。
【0013】
また、請求項2に記載の発明は、請求項1に記載の車載無線データ通信制御装置であるにおいて、前記通知手段は、前記電波環境の状態に基づいた回数だけ前記無線接続の試みを行った後に、前記無線接続ができない旨の通知を行うことを特徴とする。
【0014】
また、請求項3に記載の発明は、請求項2に記載の車載無線データ通信制御装置において、前記通知手段の、前記無線接続ができない旨の通知を行うまでに行う接続の試みの回数は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が少ないことを特徴とする。
【0015】
また、請求項4に記載の発明は、請求項1ないし3のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいた時間間隔で、前記無線接続ができない旨の通知を行うまで接続の試みを繰り返すことを特徴とする。
【0016】
また、請求項5に記載の発明は、請求項1ないし4のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいた限度時間だけ、1回の前記無線接続の試みにおいて前記無線接続の成功を待つことを特徴とする。
【0017】
また、請求項6に記載の発明は、請求項5に記載の車載無線データ通信制御装置において、前記通知手段の、前記1回の接続の試みにおいて前記無線接続の成功を待てる限度時間は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が短いことを特徴とする。
【0018】
また、請求項7に記載の発明は、請求項1ないし6のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記電波環境の状態に基づいて、前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を決定することを特徴とする。
【0019】
また、請求項8に記載の発明は、請求項1ないし7のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、前記無線通信装置(2)の電波環境の状態が圏外状態であるときは、前記無線接続の試みを行わずに、前記無線接続ができない旨の通知を行うことを特徴とする。
【0020】
また、請求項9に記載の発明は、請求項1ないし8のいずれか1つに記載の車載無線データ通信制御装置において、前記通知手段は、再度の前記無線接続の試みの前に、前記決定した前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を変更することを特徴とする。
【0021】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段、または具体的手段として下記制御回路18のCPUを機能させるためのソフトウェアの処理との対応関係を示すものである。
【発明を実施するための最良の形態】
【0022】
(第1実施形態)
図1に、本発明の第1実施形態において説明するダイヤルアップ通信システムの概要図を示す。車両3に搭載されたカーナビゲーション装置1(車載無線データ通信制御装置に相当する)は、通信モジュール2を用いて無線通信の基地局4と無線接続を確立し、データ通信のデータと音声通信のデータとを振り分けるPDSN(Packet Data Serving Node)5、プロクシサーバ6を介して、コンテンツサーバ8等のインターネット7上のデータ通信機器とデータの授受を行う。カーナビゲーション装置1が通信モジュール2を用いて行う基地局4との無線接続の確立のためのプロトコルとしては、PPPを用いる。
【0023】
図2に、このカーナビゲーション装置1および通信モジュール2の構成を示す。通信モジュール2は、CDMA(Code Division Multiple Access)、PDC(Personal Digital Cellular)等の通信方式を用いた無線通信を行うことができるようになっており、アンテナ23、ベースバンドプロセッサ24、受信回路25、送信回路26、およびメモリ27を有している。
【0024】
受信回路25は、アンテナ23が受信した信号に対して増幅、周波数変換、復調、A/D変換等を施し、その結果をベースバンドプロセッサ24に出力する。
【0025】
送信回路26は、ベースバンドプロセッサ24から入力されたデータに対してD/A変換、変調、周波数変換、増幅等を施し、その結果の信号をアンテナ23に出力する。
【0026】
メモリ27は、図示しないRAM、ROM、EEPROMから成り、ベースバンドプロセッサ24からの制御信号に基づいて、RAM、ROM、EEPROMの記憶領域からデータを読み出してアンテナ23に出力し、あるいはベースバンドプロセッサ24から入力されたデータをRAM、EEPROMに書き込む。
【0027】
ベースバンドプロセッサ24は、例えば回路構成がプログラム可能となっているFPGA(Field Programmable Gate Array)から成り、受信回路25から入力された信号に対して、当該プログラムされた回路構成に基づく処理を施し、その結果のデータをセキュリティ制御回路18に出力し、またセキュリティ制御回路18から入力されたデータに対して、当該プログラムされた回路構成に基づく処理を施し、その結果のデータを送信回路26に出力する。またベースバンドプロセッサ24は、上記処理の必要に応じて、メモリ27のROM、RAM、EEPROMに対して情報の書き込み、読み出しのための制御信号を出力する。
【0028】
本実施形態におけるベースバンドプロセッサ24の具体的処理としては、受信回路25から受信したデータに対して、用いる通信方式に則った復調処理(例えば逆拡散、QPSK復調等)等の処理を施し、その結果のデータを制御回路18に出力する。またベースバンドプロセッサ24は、制御回路18から無線送信のために入力されたデータに対して、用いる通信方式に則った変調処理等の処理を施し、その結果のデータを送信回路26に出力する。
【0029】
またベースバンドプロセッサ24は、受信回路25から入力され、復調を行ったデータを元に、受信電波の強度(以下受信電界強度と記す)の値を定期的に算出し、この算出した値を制御回路18に出力する。またベースバンドプロセッサ24は、受信回路25から入力され、復調を行ったデータを元に、基地局4から送出された信号に係る電波の受信強度と、他のノイズ電波等を含めた全受信電波の強度の比の値(以下信号強度比と記す)を定期的に算出し、算出した値を制御回路18に出力する。信号強度比の例としては、例えばCDMAにおいては、パイロットエネルギーの、受信帯域内送電力スペクトル密度に対する比率であるEc/Io値がある。
【0030】
またベースバンドプロセッサ24は、制御回路18からデータ通信のための接続を行う旨の制御信号の入力があると、基地局4との無線接続の確立のための通信を行う。例えば、制御回路18から、ATコマンド群の一部であるATDコマンド入力があると、基地局4との通信を開始するための信号を受信回路25に出力し、以後はPPP(Point to Point Protocol)等による無線接続のためのやり取りのデータを、受信回路25および送信回路26を介して基地局4と交換し合う。
【0031】
カーナビゲーション装置1は、位置検出器11、内部メモリ制御装置16、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21およびこれらに接続された制御回路18を備えている。
【0032】
表示装置20は、液晶ディスプレイ等の表示面およびスピーカを有し、制御回路18からの映像信号の入力に応じて液晶ディスプレイ等の表示面に当該映像を表示し、また制御回路18からの音声信号の入力に応じてスピーカに当該音声を出力させる。
【0033】
操作スイッチ群17は、表示装置20の表示面の周囲に設けられた複数のメカニカルスイッチ、当該表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチの押下(例えば押しボタンの押下)、タッチパネルのタッチに基づいた信号を制御回路18に出力する。
【0034】
リモコンセンサ21は、ユーザの操作に基づいて赤外線等による無線信号を送信するリモコン22から受信した信号を制御回路18に出力する。
【0035】
位置検出器11は、いずれも周知の地磁気センサ12、ジャイロスコープ13、車速センサ14、および衛星からの電波に基づいて車両の位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有し、これらのセンサ等12〜15の検出に基づいた現在位置情報を制御回路18に出力する。これらのセンサ等12〜15は各々が性質の異なる誤差を持っているため、複数のセンサを相補的に使用するように構成されている。なお精度によっては上述した内の一部で構成されていてもよく、更に図示しないステアリングの回転センサ、各駆動輪の車輪センサ等を有していてもよい。
【0036】
内部メモリ制御装置16は、HDD(ハードディスクドライブ)等の不揮発性記憶媒体を備え、制御回路18からの制御命令等に基づいて、この不揮発性記憶媒体に対してデータの読み出しおよび可能であればデータの書き込みの制御を行う。この不揮発性記憶媒体が記憶している情報としては、上記した位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データおよび目印データを含む各種データ、カーナビゲーション装置1の動作のためのプログラム、および後述する設定テーブル等がある。
【0037】
外部メモリ制御装置19は、DVD−ROM、メモリスティック、メモリカード等の外部記憶媒体に対して、データの読み出しおよび可能であればデータの書き込みの制御を行う。上記外部記憶媒体が記憶している情報としては、上記した内部メモリ制御装置16の制御する記憶媒体が有するマップマッチング用データ、地図データおよび目印データ等に対する追加データ等がある。
【0038】
制御回路18は、通常のコンピュータとして構成されており、内部にはCPU、ROM、RAM、フラッシュメモリ、I/Oおよびこれらの構成を接続するバスラインが備えられている。制御回路18は、ROM、外部メモリ制御装置19から読み出したカーナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはROM、RAM、フラッシュメモリから情報を読み出し、RAM、フラッシュメモリに対して情報の書き込みを行い、I/Oを介して位置検出器11、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21等と信号の授受を行う。
【0039】
この制御回路18のCPUは、カーナビゲーション装置1が起動するとき、ROMからブートプログラム、オペレーティングシステム(以下OSと記す)等を読み出して実行し、このOSに基づいたハードウェア制御およびプロセス管理を行う。OS上で動作するプロセスとしては、メニュープログラム、経路探索プログラム、地図表示プログラム、データ通信プログラム、接続制御プログラム、およびその他のプログラムがある。
【0040】
以下では、当該CPUがプログラムを読み込んで実行する動作を、当該実行されるプログラムの動作であるとみなして説明する。
【0041】
メニュープログラムは、OS上で動作する各種プログラムを、そのプログラムの機能や目的別に階層的にメニュー表示し、そのメニュー表示されたものの中からユーザが選択したプログラムの実行を開始させる。なお、メニュー表示は表示装置20の表示面に当該メニューの画像データを出力することで行い、また、ユーザの選択は、リモコンセンサ21を介したリモートコントロール端末(以下リモコンと称する)22または操作スイッチ群17に対する選択操作(カーソル移動、確定ボタン押下等)によって制御回路18に入力された信号に基づいて検出する。
【0042】
経路探索プログラムは、リモコン22により、あるいは操作スイッチ群17により目的地の位置が入力されると、現在位置からその目的地までの最適な経路を自動的に選択して誘導経路を形成し表示装置20に表示させる。自動的に最適な経路を設定する手法としては、ダイクストラ法等が知られている。
【0043】
地図表示プログラムは、位置検出器11から入力された現在位置情報に基づく車両現在位置マークと、外部メモリ制御装置19より読み出した地図データと、経路探索プログラムによって形成した誘導経路等の付加データとを重ねてその表示装置20の表示面に表示させる。
【0044】
データ通信プログラムは、通信モジュール2を介してインターネット7上の他の機器とデータ通信を行うためのプログラムである。データ通信プログラムとしては、例えば、Web閲覧プログラム、e−mail送受信プログラムがある。なお、データ通信プログラムは、通信モジュール2と基地局4との無線接続が確立されていない場合は、接続制御プログラムを起動する。
【0045】
接続制御プログラムは、上記データ通信プログラムによって起動されると、通信モジュール2を用いて、無線通信の基地局4とのPPP接続を確立するための動作を行う。図3に、この接続制御プログラムのフローチャートを示す。
【0046】
まず、ステップ310では、通信モジュール2の電波通信環境が、通信圏外状態であるか否かを判定する。具体的には、基地局4からの電波の信号強度比が、所定の値(例えば−16dB)より大きいときは通信圏内であると判定し、所定の値より小さいときは通信圏外であると判定する。なお、基地局4からの電波の受信強度と他のノイズ電波等の受信強度の比は、通信モジュール2から出力されたものを用いる。
【0047】
通信圏外である場合は、処理はステップ410に進み、通信圏内である場合は、処理はステップ320に進む。
【0048】
ステップ320では、リトライ回数、リトライ間隔、接続監視時間の、各リトライパラメータを通信モジュール2の電波環境の状態、車両1の走行速度に基づいて設定変更する。電波環境の状態とは、具体的には、圏外状態、弱電界状態(例えば、圏内状態で、かつ受信電界強度が−90dBm未満の状態)、および中・強電界状態(例えば、圏内状態で、かつ受信電界強度が−90dBm以上の状態)の3つの状態のいずれに該当するかをいう。この電波環境の状態は、通信モジュール2が出力する、通信モジュール2における受信電界強度および信号強度比の情報に基づいて特定する。車速は、車速センサ14からの信号に基づいて特定する。車速については、車両3が停止しているか否かを特定する。
具体的には、特定した車速が所定の速度(例えば時速1km)以下であれば停車していると判定し、そうでないなら走行していると判定する。
【0049】
設定変更は、具体的には、図4に示す設定テーブルを内部メモリ制御装置16のHDDから読み出して参照することによって行う。この設定テーブルは、車両の走行速度(停車中または走行中)および電波環境(通信圏外、弱電界、または中・強電界)毎に設けられる複数のエントリから成るデータである。各エントリは、リトライ回数、接続監視タイマ、およびリトライ間隔の情報を要素として有する。図4の表の先頭行以外の各行が1つのエントリを表し、これら各行中の各セルが、それらエントリが有する情報の組の一要素を表している。
【0050】
例えば、図4中の7行目のエントリは、車両が走行中で電波環境が中・強電界状態に対応するエントリであり、このエントリが含む情報により、車両が停車中で電波環境が弱電界状態の場合は、リトライ回数は1回、接続監視時間は40秒、リトライ間隔は5秒と特定できる。
【0051】
なお、各エントリ中の要素には、空であることを示す情報が入っている場合がある。図4においては、空の情報が入っている要素に対応するセルには、横線(−)が記載されている。例えば、図4中の3行目のエントリは、車両が停車中で電波環境が弱電界状態に対応するエントリであり、このエントリが含む情報により、車両が停車中で電波環境が弱電界状態の場合は、リトライ回数は0回、接続監視時間は40秒、リトライ間隔は空と特定できる。リトライ間隔が空なのは、この場合におけるリトライ回数がゼロなので、リトライの間隔という概念が成立しないからである。
【0052】
なお、設定テーブル中に含まれる情報は、あらかじめ設定されているものであるが、ユーザによって変更可能となっていてもよい。
【0053】
ステップ320では、上記特定した電波環境の状態および車速に該当するエントリをこの設定テーブルから抽出し、そのエントリが含むリトライ回数、接続監視時間、およびリトライ間隔の値を、制御回路18のRAM中に、所定の変数として記録する。
【0054】
次にステップ330では、接続監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0055】
次にステップ340では、ダイヤルアップ接続を実行する。具体的には、通信モジュール2に対して基地局4にPPP接続するような制御信号(例えばATDコマンド)を出力する。
【0056】
次にステップ350では、接続が成功したか否かを判定する。これは通信モジュール2から、無線接続が成功した旨の信号(例えばATコマンドの規約に則ったCONNECTの文字列)を受信したか否かで判定する。接続が成功すると、処理はステップ360に進み、接続成功の旨を表示装置20に表示させ、その後処理は終了し、終了した後は通信プログラムによるアプリケーション層に係るデータの通信が行われる。
【0057】
ステップ350で接続が未だ成功していないと判定すると、処理はステップ370に進み、接続監視タイマ満了または接続失敗かを判定する。接続監視タイマ満了か否かは、直前のステップ330でRAMに記録した時刻と、現在時刻との差が、ステップ320で設定した接続監視時間より大きいか否かで判定する。また、接続失敗か否かは、車両3から、接続が失敗した旨の信号(例えば、ATコマンドの規約に則ったNO CARRIORの文字列)が出力されたか否かで判定する。接続監視タイマが満了せず、かつ接続失敗でもない場合は、処理はステップ350に戻る。接続監視タイマ満了または接続失敗の場合、処理はステップ380に進む。
【0058】
これによって、接続成功となって処理がステップ360に進むか、あるいは接続失敗または接続監視タイマ満了(すなわち接続不成功)となって処理がステップ380に進むまでは、ステップ350と370の判定処理が繰り返される。
【0059】
ステップ380では、リトライ回数が満了したか否かを判定する。具体的には、接続制御プログラムが起動してからダイヤルアップ接続を実行した回数が、[ステップ320で設定したリトライ回数+1]以上であるか否かを判定する。リトライ回数が満了している場合、処理はステップ390に進み、満了していない場合、処理はステップ400に進む。
【0060】
ステップ390では、接続失敗の旨を表示装置20に表示させる。そして処理は終了する。
【0061】
ステップ400では、リトライ間隔待ちを行う。具体的には、ステップ320で設定したリトライ間隔の時間が経過するまで待つ。そして、このリトライ間隔の時間が経過すると、処理はステップ330に戻る。
【0062】
以上のようなステップ310〜400の処理によって、接続制御プログラムは、通信モジュール2の電波環境が通信圏内状態の場合においては、車両3が停止しているか走行しているか、通信モジュール2の電波環境が弱電界状態か中・強電界状態か、および設定テーブルに基づいて、リトライパラメータの値を決定する(ステップ330)。そして、この決定したリトライパラメータに基づいたタイミングで無線接続が不能である旨の通知を行う。すなわち、無線接続が不能である旨の通知をする前に、[リトライ回数+1]回だけ無線接続を試み、また1回の無線接続の試みにおいては接続監視時間を限度として無線接続の成功を待ち、また1回の無線接続の試みが不成功となった後、無線接続の試みを再度行うまでにリトライ間隔分だけ待つ。なお、無線接続が成功した場合は、無線接続が不能である旨の通知を行わないのは当然である。
【0063】
また、ステップ310で圏外であると判定した後の、ステップ410では、車両3の走行速度を特定し、車両3が停止状態か否かを判定する。車両3の走行速度の特定、および車両3が停止状態か否かの判定の具体的な手法は、ステップ320と同様である。車両が走行している場合、処理はステップ450に進み、車両が停止している場合、処理はステップ420に進む。
【0064】
ステップ420では、圏外復帰監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0065】
次にステップ430では、通信モジュール2の電波環境が、圏外状態から復帰したか否かを判定する。すなわち、通信モジュール2から出力される受信電界強度の情報に基づいて、通信モジュール2の電波環境が、弱電界状態、中・強電界状態のいずれかであるか否かを判定する。圏外状態から復帰したと判定すると、処理はステップ320に戻り、復帰していないと判定すると、処理はステップ440に進む。
【0066】
ステップ440では、圏外復帰監視タイマが満了したか否かを判定する。圏外復帰監視タイマ満了か否かは、直前のステップ420でRAMに記録した時刻と、現在時刻との差が、所定の圏外復帰監視タイマ値(例えば120秒)より大きいか否かで判定する。なお、所定の圏外復帰監視タイマ値は、あらかじめ決められている。圏外復帰監視タイマが満了すると、処理はステップ450に進み、満了していないと、処理はステップ430に戻る。
【0067】
これによって、圏外復帰となって処理がステップ320に進むか、あるいは圏外復帰監視タイマ満了となって処理がステップ450に進むまでは、ステップ430と440の判定処理が繰り返される。
【0068】
ステップ450では、ステップ390と同様、接続失敗の旨の表示を表示装置20に行わせる。そして処理は終了する。
【0069】
以上のようなステップ410〜450の処理によって、通信モジュール2の電波環境が通信圏外状態の場合には、車両が停止状態ならば直ちに接続が不能である旨を表示装置20を用いてユーザに通知し、また車両が走行状態ならば、無線接続が不能である旨の通知を行う前に、圏外復帰監視タイマ値の時間だけ、通信圏外から通信圏内に復帰することを待つ。そして、圏内に復帰した場合は、新たな車両の走行速度、および通信モジュール2の電波環境に基づいて、リトライパラメータを決定し、またこの新たな車両の走行速度、および通信モジュール2の電波環境に基づいたタイミングで無線接続が不能である旨の通知を行う。
【0070】
以上の様な接続制御プログラムの動作によって、カーナビゲーション装置1は、リトライパラメータを、車速検出手段が検出した車両の走行速度の情報、通信モジュール2の電波環境の状態、および設定テーブルに基づいて決定し、無線接続が不能である旨の通知を、車速検出手段が検出した車両の走行速度の情報、および通信モジュール2の電波環境の状態に基づいたタイミングで行うので、無線接続ができない旨の通知を行うタイミングを、車速に応じて制御することができる。
【0071】
また、図4の設定テーブルの表の通り、リトライ回数、接続監視時間の値は、車両の停車中よりも車両の走行中の方が大きい場合がある。これによって、車両停止時には、無線接続ができない旨の通知のタイミングが、車両走行時に比べて早いので、運転者のイライラ感を低減することができる。
【0072】
また、車両が走行中の場合、通信モジュール2が弱電界状態の場合よりも中・強電界状態の場合の方が、リトライ回数および接続監視時間の値が小さい。これは、中・強電界状態の場合に比べ、弱電界状態の場合は、無線接続が成功し難いので、通信不能の通知までのタイミングをより遅らせるようにするためである。
【0073】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なる部分は、制御回路18のCPUが実行する接続制御プログラムのみである。図5に、本実施形態における接続制御プログラムを示す。なお、図3と図5において同一の符号が付されたステップは、互いに同一の処理を行うものであり、ここではその詳細についての説明は省略する。
【0074】
まず、ステップ510では、車速および通信モジュール2の電波環境の状態に基づいて、リトライ回数を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境および車両の停止、走行のエントリに基づいて、リトライ回数を所定の変数として制御回路18のRAM中に記録する。
【0075】
次にステップ520では、通信モジュール2から、電波状態の情報を取得する。
【0076】
次にステップ530では、通信モジュール2の電波環境が圏外状態であるか否かを判定する。判定の具体的な手法は、図3のステップ310と同様である。圏外であると判定すると、処理は図6のステップ410に進み、圏外でないと判定すると、処理はステップ540に進む。
【0077】
ステップ540では、車速および通信モジュール2の電波環境の状態に基づいて、接続監視時間を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境および車両の停止、走行のエントリに基づいて、接続監視時間を所定の変数として制御回路18のRAM中に記録する。更に、接続監視タイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0078】
ステップ540の後のステップ350〜390の処理は、図3の同符号の処理と同様である。ただし、ステップ370での、リトライ待ちタイマが満了したか否かの判定については、リトライ待ちタイマ満了か否かは、直前のステップ540でRAMに記録した時刻と、現在時刻との差が、ステップ540で設定した接続監視時間より大きいか否かで判定する。また、ステップ380でリトライ回数が満了していないと判定した場合、処理はステップ550に進む。
【0079】
ステップ550では、ステップ520と同様、通信モジュール2から電波状態の情報を取得する。
【0080】
次にステップ560では、ステップ530と同様、通信モジュール2の電波環境が圏外状態であるか否かを判定する。圏外状態である場合、処理は図6のステップ410に進み、圏外状態でない場合、処理はステップ570に進む。
【0081】
ステップ570では、電波環境の状態に基づいて、リトライ間隔を決定する。具体的には、図3のステップ320と同様、図4の設定テーブルを参照して、該当する電波環境のエントリ(ただし、実際に車両3が走行中であると否とに関わらず、走行中の場合のエントリを使用する)に基づいて、リトライ間隔を所定の変数として制御回路18のRAM中に記録する。更に、リトライ待ちタイマを起動する。具体的には、現在時刻を制御回路18のRAMの所定の領域に記録する。
【0082】
次に、ステップ580では、ステップ530、560と同様、通信モジュール2が圏外状態であるか否かを判定し、圏外状態である場合、処理は図6のステップ410に進み、圏外状態でない場合、処理はステップ590に進む。
【0083】
ステップ590では、リトライ待ちタイマが満了したか否かを判定する。リトライ待ちタイマ満了か否かは、直前のステップ570でRAMに記録した時刻と、現在時刻との差が、ステップ570で設定したリトライ間隔より大きいか否かで判定する。リトライ待ちタイマが満了した場合、処理はステップ540に進み、リトライ待ちタイマが満了していない場合、処理はステップ580に戻る。
【0084】
これによって、圏外状態となって処理がステップ410に進むか、あるいはリトライ待ちタイマ満了となって処理がステップ540に進むまでは、ステップ580と590の判定処理が繰り返される。
【0085】
なお、図6のステップ430では、圏外から復帰したと判定すると、処理は図5のステップ540に進む。
【0086】
接続制御プログラムがこのようになっていることで、カーナビゲーション装置1は、無線接続が不成功に成った後(ステップ370のYesへの分岐に対応する)、再度の無線接続の試みの前に、先に決定したリトライパラメータの値を、新たな車両3の走行速度および通信モジュール2の電波環境状態に基づいて変更するようになっている。これによって、カーナビゲーション装置1は、第1実施形態の効果に加え、車速、電波環境の変動に柔軟に対応することができるようになる。ただし、リトライパラメータののうち、リトライ回数は固定としている。
【0087】
(第3実施形態)
次に、本発明の第3実施形態について説明する。本実施形態が第2実施形態とで変化した部分は、内部メモリ制御装置16のHDD中の設定テーブルの、車両が停車状態で、かつ電波環境が中・強電界のエントリにおいて、リトライ回数が0回から1回に変化し、またリトライ間隔が1秒となったことのみである。このような場合の設定テーブルを図7に表として示す。
【0088】
このようになっていることで、リトライ間隔の値は、車両の停車中よりも車両の走行中の方が大きい場合がある。これによって、第1、第2実施形態の効果に加え、車両停止時には、無線接続ができない旨の通知のタイミングが、リトライ間隔が小さいことで、車両走行時に比べて早いので、運転者のイライラ感を低減することができる。
【0089】
なお、上記した各実施形態において、車両が停止しているか否かについては、車速センサ14ではなく、例えば車両3がドライブレンジ(P、R、D、L等)を検出するドライブレンジセンサを備え、このドライブレンジセンサから、ドライブレンジがP(駐車)の位置にあれば、車両は停止しており、それ以外の場合は、車両は停止していないと判定するようになっていてもよい。すなわち、車速検出手段は、車両の走行速度に関する情報を検出できれば、どのようなものであってもよい。
【図面の簡単な説明】
【0090】
【図1】本発明の第1実施形態において説明するダイヤルアップ通信システムの概要図である。
【図2】カーナビゲーション装置1および通信モジュール2の構成図である。
【図3】第1実施形態における接続制御プログラムのフローチャートである。
【図4】設定テーブルを示す図表である。
【図5】第2実施形態における接続制御プログラムの一部のフローチャートである。
【図6】第2実施形態における接続制御プログラムの一部のフローチャートである。
【図7】第3実施形態における設定テーブルを示す図表である。
【符号の説明】
【0091】
1…カーナビゲーション装置、2…通信モジュール、3…車両、4…基地局、
5…PDSN、6…プロクシサーバ、7…インターネット、8…コンテンツサーバ、
11…位置検出器、12…地磁気センサ、13…ジャイロスコープ、
14…車速センサ、15…GPS受信機、16…内部メモリ制御装置、
17…操作スイッチ群、18…制御回路、19…外部メモリ制御装置、
20…表示装置、21…リモコンセンサ、22…リモコン、23…アンテナ、
24…ベースバンドプロセッサ、25…受信回路、26…送信回路、27…メモリ。
【特許請求の範囲】
【請求項1】
無線通信装置(2)を用いて他の無線通信装置(4)と無線接続することによって、データ通信を行う車載無線データ通信制御装置であって、
前記無線接続が不能である旨の通知を、前記無線通信装置(2)の電波環境の状態に基づいたタイミングで行う通知手段(310〜450、510〜590)を備えた無線データ通信制御装置。
【請求項2】
前記通知手段は、前記電波環境の状態に基づいた回数だけ前記無線接続の試みを行った後に、前記無線接続ができない旨の通知を行うことを特徴とする請求項1に記載の車載無線データ通信制御装置。
【請求項3】
前記通知手段の、前記無線接続ができない旨の通知を行うまでに行う接続の試みの回数は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が少ないことを特徴とする請求項2に記載の車載無線データ通信制御装置。
【請求項4】
前記通知手段は、前記電波環境の状態に基づいた時間間隔で、前記無線接続ができない旨の通知を行うまで接続の試みを繰り返すことを特徴とする請求項1ないし3のいずれか1つに記載の車載無線データ通信制御装置。
【請求項5】
前記通知手段は、前記電波環境の状態に基づいた限度時間だけ、1回の前記無線接続の試みにおいて前記無線接続の成功を待つことを特徴とする請求項1ないし4のいずれか1つに記載の車載無線データ通信制御装置。
【請求項6】
前記通知手段の、前記1回の接続の試みにおいて前記無線接続の成功を待てる限度時間は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が短いことを特徴とする請求項5に記載の車載無線データ通信制御装置。
【請求項7】
前記通知手段は、前記電波環境の状態に基づいて、前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を決定することを特徴とする請求項1ないし6のいずれか1つに記載の車載無線データ通信制御装置。
【請求項8】
前記通知手段は、前記無線通信装置(2)の電波環境の状態が圏外状態であるときは、前記無線接続の試みを行わずに、前記無線接続ができない旨の通知を行うことを特徴とする請求項1ないし7のいずれか1つに記載の車載無線データ通信制御装置。
【請求項9】
前記通知手段は、再度の前記無線接続の試みの前に、前記決定した前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を変更することを特徴とする請求項1ないし8のいずれか1つに記載の車載無線データ通信制御装置。
【請求項1】
無線通信装置(2)を用いて他の無線通信装置(4)と無線接続することによって、データ通信を行う車載無線データ通信制御装置であって、
前記無線接続が不能である旨の通知を、前記無線通信装置(2)の電波環境の状態に基づいたタイミングで行う通知手段(310〜450、510〜590)を備えた無線データ通信制御装置。
【請求項2】
前記通知手段は、前記電波環境の状態に基づいた回数だけ前記無線接続の試みを行った後に、前記無線接続ができない旨の通知を行うことを特徴とする請求項1に記載の車載無線データ通信制御装置。
【請求項3】
前記通知手段の、前記無線接続ができない旨の通知を行うまでに行う接続の試みの回数は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が少ないことを特徴とする請求項2に記載の車載無線データ通信制御装置。
【請求項4】
前記通知手段は、前記電波環境の状態に基づいた時間間隔で、前記無線接続ができない旨の通知を行うまで接続の試みを繰り返すことを特徴とする請求項1ないし3のいずれか1つに記載の車載無線データ通信制御装置。
【請求項5】
前記通知手段は、前記電波環境の状態に基づいた限度時間だけ、1回の前記無線接続の試みにおいて前記無線接続の成功を待つことを特徴とする請求項1ないし4のいずれか1つに記載の車載無線データ通信制御装置。
【請求項6】
前記通知手段の、前記1回の接続の試みにおいて前記無線接続の成功を待てる限度時間は、前記電波環境が弱電界状態の場合よりも強電界状態の場合の方が短いことを特徴とする請求項5に記載の車載無線データ通信制御装置。
【請求項7】
前記通知手段は、前記電波環境の状態に基づいて、前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を決定することを特徴とする請求項1ないし6のいずれか1つに記載の車載無線データ通信制御装置。
【請求項8】
前記通知手段は、前記無線通信装置(2)の電波環境の状態が圏外状態であるときは、前記無線接続の試みを行わずに、前記無線接続ができない旨の通知を行うことを特徴とする請求項1ないし7のいずれか1つに記載の車載無線データ通信制御装置。
【請求項9】
前記通知手段は、再度の前記無線接続の試みの前に、前記決定した前記無線接続ができない旨の通知を行うタイミングに関するパラメータの値を変更することを特徴とする請求項1ないし8のいずれか1つに記載の車載無線データ通信制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−228322(P2008−228322A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2008−95253(P2008−95253)
【出願日】平成20年4月1日(2008.4.1)
【分割の表示】特願2003−303266(P2003−303266)の分割
【原出願日】平成15年8月27日(2003.8.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成20年4月1日(2008.4.1)
【分割の表示】特願2003−303266(P2003−303266)の分割
【原出願日】平成15年8月27日(2003.8.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]