
車載無線通信装置および車車間通信方法
【課題】速度差のある車両との間でも必要な通信を確保でき、かつ、通信量を軽減可能な車車間通信技術を提供する。
【解決手段】車車間通信システムを構成する各車両(車載無線通信装置)は、定期的に自車に関する車両情報を送信するものであり、この送信間隔が自車の車速に応じて設定される。送信間隔は自車の速度が低いほど長く設定される。ここで、自車両よりも速い他の車両から情報を受信した場合には、自車速度に応じて設定された送信タイミングにかかわらずに即座に応答を返すとともに、送信間隔を相手車両の速度に応じた値に設定する。追突事故が起きりうる状況など、相手車両が自車両にとって危険な場合に上記制御を行うことが好適である。また、上記処理を行う車両が自車両を含めて複数台存在する場合には、その台数に応じて上記処理を行う確率を決定することも好ましい。
【解決手段】車車間通信システムを構成する各車両(車載無線通信装置)は、定期的に自車に関する車両情報を送信するものであり、この送信間隔が自車の車速に応じて設定される。送信間隔は自車の速度が低いほど長く設定される。ここで、自車両よりも速い他の車両から情報を受信した場合には、自車速度に応じて設定された送信タイミングにかかわらずに即座に応答を返すとともに、送信間隔を相手車両の速度に応じた値に設定する。追突事故が起きりうる状況など、相手車両が自車両にとって危険な場合に上記制御を行うことが好適である。また、上記処理を行う車両が自車両を含めて複数台存在する場合には、その台数に応じて上記処理を行う確率を決定することも好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載無線通信装置および車車間通信方法に関する。
【背景技術】
【0002】
車車間通信では、各車両が現在位置、走行速度、走行方向などの情報を周囲の車両に定期的に送信する。車車間通信のメディアアクセス制御方式の一つとしてCSMA(Carrier Sense Multiple Access)方式がある。CSMA方式は、各車両が共通の通信路(周波
数)を利用して通信路が空いているときに送信を開始する通信方式である。したがって、車両の数が増えると通信の衝突が多発し適切に情報の送信が行えなくなる。
【0003】
そこで、通信量の削減を図るために、状況に応じてデータ送信頻度を変化させる技術が開示されている。特許文献1では、車両速度が遅い場合にデータ送信頻度を低くし、車両速度が速い場合にデータ送信速度を高くするアルゴリズムが提案されている。これは、車両速度が遅いほど状況の変化が少ないため、頻繁に情報を通知しなくても良いためである。また、特許文献2では、車両速度に応じて送信頻度を変更することに加えて、減速中にはそれほど送信頻度を低くしないことが開示されている。これは、急減速を行ったときに後続車両との通信の遅延を防止するためである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−165806号公報
【特許文献2】特開2008−245268号公報
【特許文献3】特開2001−45013号公報
【特許文献4】特開2008−11343号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような従来技術は、追突事故防止などのための車車間通信を行う場合に、送信頻度差によって効果的に事故を防止することができないという問題がある。たとえば、渋滞の最後尾にいる車両は車両速度が低いため、送信頻度が低く設定される。したがって、後方から速い速度で接近してくる後続車両に対して、自車の存在を通知するタイミングが遅れてしまうおそれがある。これによって、追突を防止するための警告や自動制御の開始タイミングが遅れてしまうおそれがある。
【0006】
なお、特許文献2でも後続車両との送信頻度差(速度差)から生じる通信遅延の防止を目的としているが、この技術は、ほぼ同じ速度で走行している前方車両が減速した状況でしか有効ではない。
【0007】
本発明は上記の問題点を考慮してなされたものであり、その目的は、速度差のある車両との間でも必要な通信を確保でき、かつ、通信量を軽減可能な車載無線通信装置および車車間通信方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、以下の手段または処理によって車車間通信を行う。
【0009】
本発明に係る車載無線通信装置は、情報を送信する送信手段と、他車両からの情報を受
信する受信手段と、自車両の速度を検出する自車速度検出手段と、自車両の速度が遅いほど送信手段の送信頻度を低く設定する送信制御手段を備える。ここで、他車両が送信する情報にはその車両の走行速度が含まれており、したがって受信情報から周囲の車両の車速を判断可能である。そして、自車両よりも速い車両からの情報を受信した場合に、送信制御手段は、自車速度に応じて設定された送信頻度にかかわらず送信手段によって直ちに応答を送信するとともに、今後の送信頻度をこの他車両の速度に応じた頻度に設定する。
【0010】
このように、自車速度が遅いほど送信頻度を低く抑えることで通信量の削減が図れる。また、自車両よりも速い他車両から情報を受信したときに、即座に応答を返すとともに、それ以降は相手車両の速度に応じた送信頻度で通信を行うので、相手車両との間で必要な通信を行える。
【0011】
また、本発明において、他車両からの情報に位置、走行方向および走行速度の情報が含まれ、送信制御手段は、受信手段が自車両よりも速い他車両から情報を受信し、かつ、この他車両が自車両にとって危険であると判断できる場合に、上述した応答処理および相手車両に合わせた送信頻度変更処理を行うことが好ましい。
【0012】
このように、他車両に対して応答する必要があると判断できる場合(他車両が自車両にとって危険な場合)のみ応答処理および送信頻度の変更を行うことで、通信量の増加を最低限に抑えることができる。
【0013】
他車両が自車両にとって危険であるか否かの判断は、たとえば、次のようにして行うことができる。すなわち、自車両が車群の最後尾に位置し、かつ、他車両が後方から自車両に向かって接近(自車速度よりも速い速度で走行)している場合に、この他車両が自車両にとって危険であると判断することができる。言い換えると、追突事故が起きうる状況を危険な状況として判断できる。上記以外に、自車両と他車両との間で左折巻き込みや右直事故、出会い頭衝突などが起きうる状況を、他車両が自車両にとって危険な例として挙げることができる。
【0014】
また、本発明において、送信制御手段は、車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、応答処理および送信頻度変更処理を行うことが好ましい。たとえば、車群の最後尾に自車両を含めて3台の車両が存在する場合には、各車両が3分の1の確率で応答処理および送信頻度変更処理を行う。応答する確率は、最後尾車両数分の1とする必要はなく、最後尾車両数が多いほど小さい値であれば十分である。
【0015】
車群の最後尾に複数台の車両が存在する場合に、各車両が即座に応答すると、通信の衝突が発生し適切に通信が行えないことが考えられる。そこで、上記のように台数に応じた確率で応答処理および送信頻度変更処理を行うことで、複数台の車両が一斉に応答して通信に支障をきたす可能性を減少できる。
【0016】
なお、本発明は、上記手段の少なくとも一部を有する車載無線通信装置として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車車間通信方法、または、この方法を実現するためのコンピュータプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0017】
本発明によれば、速度差のある車両との間でも必要な通信を確保できるとともに、通信量を軽減できる。
【図面の簡単な説明】
【0018】
【図1】第1,2の実施形態における車載無線通信装置の構成を示す図である。
【図2】車両情報パケットのデータ構造を示す図である。
【図3】車速に応じた送信周期を示す図である。
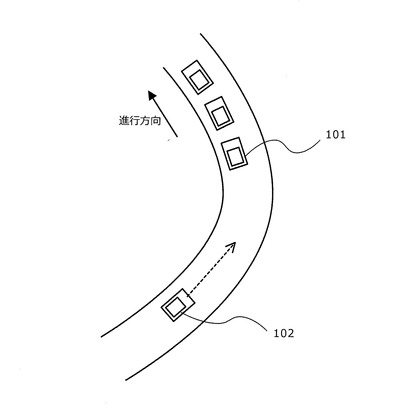
【図4】第1の実施形態の処理が適用される状況を説明する図である。
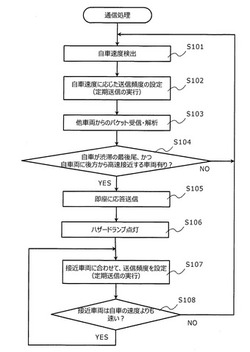
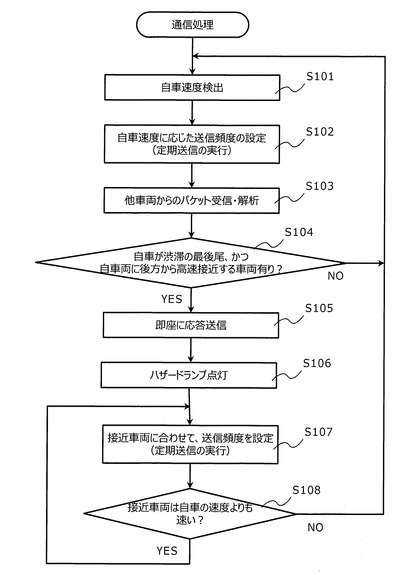
【図5】第1の実施形態における通信処理の流れを示すフローチャートである。
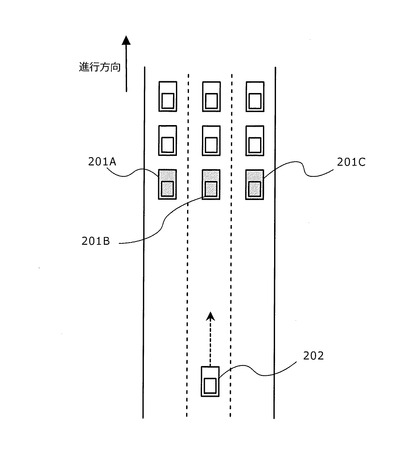
【図6】第2の実施形態の処理が適用される状況を説明する図である。
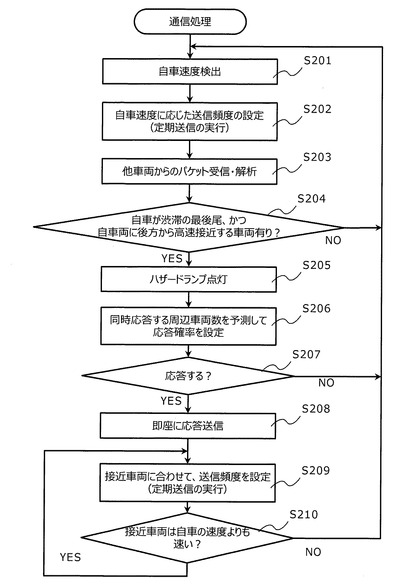
【図7】第2の実施形態における通信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
(第1の実施形態)
〈装置構成〉
まず、本実施形態に係る車車間無線通信システムの概要を説明する。本実施形態における車車間無線通信システムでは、各車両(車載無線通信装置)が定期的に、周囲の車両に対して車両情報を送信する。この車両情報には、自車両の位置、走行方向、走行速度などが含まれる。したがって、システム内のそれぞれの車両は、周囲に存在する車両の位置やその走行速度などの情報を取得することができる。そして、たとえば、自車両と他車両との位置関係や相対速度などから、自車両が危険な状況か否かを判断できる。危険な状況では、ドライバーに警告を発したり、運転に介入したりすることで安全運転が実現できる。
【0020】
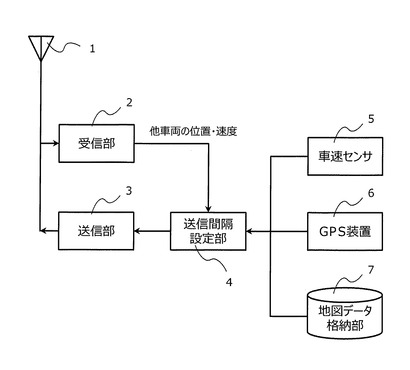
本実施形態における車載無線通信装置の構成を、図1を参照して説明する。車載無線通信装置は、アンテナ1、受信部2、送信部3、送信間隔設定部4、車速センサ5、GPS装置6、地図データ格納部7を備える。
【0021】
受信部2はアンテナ1を介して他車両からの車両情報を受信する。送信部3はアンテナ1を介して周囲の車両に対して車両情報を送信する。送信部3は定期的に(一定周期で)車両情報の送信を行う。
【0022】
本システムにおける各車両は、無線通信方式としてCSMA方式を採用している。CSMA方式では、パケットの送信に先立ってキャリアセンスを行い、通信路が空いていることが確認できてからパケットの送信が行われる。
【0023】
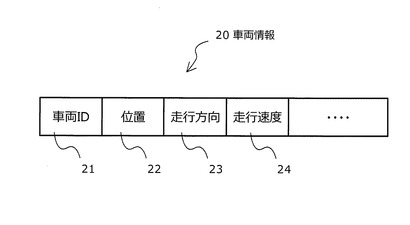
図2に、車両間でやりとりされる車両情報パケットのデータ構造を示す。この車両情報20には、車両ID21、位置22、走行方向23、走行速度24などが含まれる。位置22および走行方向23はGPS装置6によって取得可能である。走行速度24は車速センサ5によって取得可能である。なお、他車両から受信した車両情報は上述したように安全運転などのために用いられるが、その説明は省略する。
【0024】
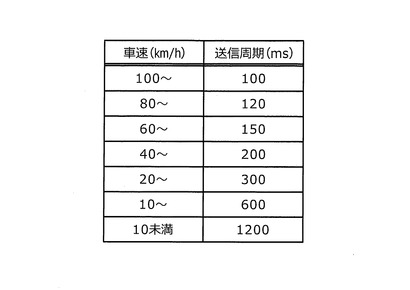
送信間隔設定部4は、基本的に自車両の速度に応じて送信周期(送信頻度)を設定する。送信周期の設定例を図3に示す。図3に示すように、自車速度が速いほど送信周期を短くして、送信頻度を高く設定する。逆に、自車速度が遅いほど送信周期を長くして、送信頻度を低く設定する。
【0025】
送信間隔設定部4は、自車両よりも速い速度の車両から情報を受信し、この車両に対して応答する必要がある場合には、自車速度に応じて設定された送信周期にかかわらず即座に応答するとともに、送信周期をこの相手車両の速度に応じた周期に変更する。
【0026】
相手車両の速度が自車両よりも速いか否かは、相手車両から送られる車両情報(走行速度24)を解析することで判断できる。また、相手車両に対して応答する必要があるか否かは、相手車両が自車両にとって危険であるかを認識することで判断できる。相手車両が
自車両にとって危険な状況とは、たとえば図4に示すように、自車両101が渋滞(車群)の最後尾に位置し、同じ道路の後方から相手車両102が高速で接近してくる状況が考えられる。自車両が渋滞(車群)の最後尾に位置するか否かは、周囲の車両と車両情報を交換して得られる各車両の位置関係から判断可能である。相手車両が同じ道路の後方から接近しているか否かは、GPS装置6から得られる自車両の位置と、相手車両から送信される車両情報に含まれる位置22と、地図データ格納部7に格納されている地図データに基づいて判断可能である。
【0027】
相手車両が自車両にとって危険な状況としては上記のような追突事故の可能性がある状況以外に、右直事故や出会い頭衝突事故や左折巻き込み事故の可能性がある状況を例として挙げることができる。このような状況にあるか否かは、GPS装置6から得られる自車両の位置と、相手車両から送信される車両情報に含まれる位置・走行速度・走行方向などの情報、および地図データを参照することで判断可能である。
【0028】
このように、相手車両が自車両にとって危険である場合には、送信部3から即座に自車両の車両情報が送信される。相手車両は送信される車両情報を受信することで危険な状況であると判断でき、ドライバーに対する警告や運転への介入制御を行い、事故を未然に防ぐことができる。自車両が停止中や低速走行している場合には送信間隔が長く設定されており、自車速度に基づく送信タイミングを守ってしまうと相手車両への応答が遅れ、危険な状況に適切に対処できなく可能性がある。本実施形態では、即座に応答を返すことで危険回避の遅延を防止できる。また、即座に応答を返すだけでなく、それ以降は相手車両の速度に合わせた送信頻度に設定するため、この車両との間で適切な通信を確保できる。
【0029】
〈処理フロー〉
次に、本実施形態における各車載通信装置の通信処理を、図5のフローチャートを参照しつつ説明する。
【0030】
まず、車速センサ5から自車両の速度を検出する(ステップS101)。そして、送信間隔設定部4は、図3に示すように自車両速度に応じた送信頻度を設定する(ステップS102)。これ以降、送信部3は、この設定された送信頻度で自車両の車両情報(位置や車速等)を送信する。
【0031】
次に、受信部2は他車両からの車両情報を受信する(ステップS103)。送信間隔設定部4は、収集した他車両の情報から、自車両が渋滞(車群)の最後尾に位置するか、および、後方から高速に接近する車両が存在するか判断する(ステップS104)。車両情報には各車両の位置情報が含まれるため、自車両が渋滞の最後尾に存在するか否かを判断できる。また、車両情報に位置・走行方位・走行速度が含まれるので、自車両と同じ道路上を、同じ方向に、自車両よりも高速に走行している車両が存在するか否かも判断可能である。
【0032】
自車両が渋滞の最後尾に位置しないか、後方から高速接近する車両が存在しない場合(S104:NO)は、ステップS101に戻る。
【0033】
一方、自車両が渋滞の最後尾に位置し、かつ、後方から高速接近する車両が存在する場合(S104:YES)は、自車速度に応じた送信頻度(送信タイミング)にかかわらず、送信部3は即座に応答を送信する(ステップS105)。また、ハザードランプを自動点灯させて接近車両に注意を促す(ステップS106)。そして、送信間隔設定部4は、高速接近する車両の速度に応じて送信頻度の設定を行う(ステップS107)。これ以降、送信部3は、この相手車両の速度に応じて設定された送信頻度で自車両の車両情報を送信する。そして、接近車両が自車の速度よりも速い間(S108:YES)は、相手車両
の速度に応じて送信頻度の設定を行う。接近車両の速度が自車と同じかそれ以下になったら、ステップS101へ戻る。
【0034】
〈動作例〉
図4に示すように、自車両101が渋滞の最後尾に位置する状況を例に説明する。まず、自車速度の検出が行われる(S101)。ここでは、車両101は渋滞の最後尾に位置するため、停止または時速10km以下の低速度で走行しているとする。この速度に対する送信頻度として、1200ミリ秒(1.2秒)に1回の送信頻度が設定される(S102、図3)。したがって、車両101は1.2秒に1回の頻度で自車両に関する情報を周囲に送信する。
【0035】
また、車両101は周囲の車両からの車両情報を受信し、解析する(S103)。受信する車両情報から、周囲の車両と自車両との位置関係が把握可能であり、車両101は車群(渋滞)の最後尾に位置することが分かる。
【0036】
また、車両102からの車両情報を受信・解析することで、この車両102が後方から高速で接近しつつあることが判断できる。したがって、自車両は渋滞の最後尾に位置し、かつ、自車両に高速で後方から接近する車両が存在する(S104:YES)ことが分かる。そこで、車両101は、車両102に対して即座に自車両情報を応答として送信する(S105)とともに、ハザードランプを点灯させる(S106)。そして、車両102の速度に合わせて自車両の送信頻度の変更を行う(S107)。ここで、車両102が時速100kmで走行しているのであれば、車両101は100ミリ秒に1回の割合で車両情報を送信する。これにより、車両101と車両102は同じ送信頻度で情報の送信が行え、両車両間で適切な通信が確保される。
【0037】
車両102は、車両101からの情報を受信することで前方に低速車両が存在することが分かり、ドライバーに対して警告処理や自動減速制御などをおこなって事故を防止する。このように車両102は次第に走行速度を落としていく。車両101はそれに合わせて送信頻度の変更を行う(S107、S108)。最終的に車両102は車両101と同じ速度まで減速し、車両101は通常の制御に戻る。
【0038】
〈実施形態の作用/効果〉
本実施形態によれば、各車両は自車速度に応じた送信頻度で定期的に自車情報を送信している。ここで、自車速度が低速であるほど送信頻度を低く設定している。したがって、各車両の通信量を減らすことができ、通信の衝突などの問題が生じない好適な通信が実現できる。なお、車速が遅い場合には状況の変化が大きくないため、送信頻度を少なくしても問題は生じない。
【0039】
また、自車速度が低速で送信頻度が低く設定されている場合でも、危険な車両が高速に接近している状況など必要な場合には即座に応答するので、この高速な車両に対して危険を通知するタイミングに遅れが生じない。したがって、事故防止などを適切に実現できる。また、このような危険な状況では、高速で接近する相手車両の車速に合わせた送信頻度に設定することで、その後も自車両と相手車両との間で通信を確保することができる。
【0040】
(第2の実施形態)
本実施形態では、第1の実施形態において複数の車両が高速接近車両(危険車両)に対して応答する可能性がある状況に対処する。たとえば、図6に示すよう状況では、3車線の道路で渋滞が発生しており、その最後尾に車両201A〜Cの3台の車両が存在する。ここに後方から車両202が高速で接近する状況を考える。この場合、第1の実施形態による制御では、車両201A〜Cのそれぞれが車両202に対して即座に応答を返そうと
してしまう。このように複数の車両が一斉に送信を始めると、通信が衝突してうまく車両202まで伝わらない。本実施形態では、このような状況に対処するために、最後尾の車両数を考慮して応答確率を減らして、一斉応答による通信衝突を回避する。
【0041】
本実施形態における車載無線通信システムの機能構成は第1の実施形態(図1)と同様であるため説明は省略する。本実施形態における通信処理の流れを、図7のフローチャートを参照しつつ説明する。
【0042】
図7のステップS201〜S205までは第1の実施形態と同様の処理である。簡単に説明すると、自車の速度に応じて送信頻度を設定(S201,S202)し、他車両からの情報を受信して危険な状況であるか否かを判断する(S203,204)。
【0043】
自車両が渋滞の最後尾に位置し、かつ、自車両に高速に接近する車両があると判断された場合(S204:YES)は、まずハザードランプを自動的に点灯させる(S205)。ここまでは第1の実施形態と同様であるが、次に、同時に応答する周辺車両の数を予測して、応答確率を設定する(S206)。同時に応答する周辺車両の数は、渋滞の最後尾に隣接車両が何台存在するかを判断することで行える。なお、この判断は周囲の車両と情報交換をしているので把握可能である。また、単純に地図データから現在走行中の道路の車線数を取得し、その車線数を同時応答車両数とみなしても構わない。そして、たとえば自車両を含めて3台の車両が応答すると予測された場合は、応答確率として1/3を設定する。なお、応答確率の設定例は1/(応答車両数)に限られず、応答車両数が多いほど応答確率を少なく設定すれば十分である。
【0044】
応答確率を設定したら、乱数などにより抽選を行い実際に応答するか否かを決定する(S207)。応答しないと判定された場合(S207:NO)は、ステップS201に戻って通常通りの処理を継続する。応答すると判定された場合(S207:YES)は、自車速度に応じた送信頻度(送信タイミング)にかかわらず、送信部3は即座に応答を送信する(ステップS208)。そして、送信間隔設定部4は、高速接近する車両の速度に応じて送信頻度の設定を行う(ステップS209)。これ以降、送信部3は、この相手車両の速度に応じて設定された送信頻度で自車両の車両情報を送信する。そして、接近車両が自車の速度よりも速い間(S210:YES)は、相手車両の速度に応じて送信頻度の設定を行う。接近車両の速度が自車と同じかそれ以下になったらステップS201へ戻る。
【0045】
このようにすることで、複数の車両が同時に応答することによる通信の衝突を確率を減らすことができる。なお、最後尾車両のそれぞれは独立で判断を行っているため、複数の車両が一斉に応答することもあり得るが、その可能性や同時応答車両数を減らすことができるので効果的である。
【0046】
また、いずれかの車両が高速接近車両に応答したことを、周囲の車両は通信を傍受することで把握できる。したがって、周囲の車両はそれ以降、この高速接近車両から車両情報を受信しても即座の応答や送信頻度変更処理などを行わないことができる。
【符号の説明】
【0047】
2 受信部
3 送信部
4 送信間隔設定部
5 車速センサ
6 GPS装置
7 地図データ格納部
【技術分野】
【0001】
本発明は、車載無線通信装置および車車間通信方法に関する。
【背景技術】
【0002】
車車間通信では、各車両が現在位置、走行速度、走行方向などの情報を周囲の車両に定期的に送信する。車車間通信のメディアアクセス制御方式の一つとしてCSMA(Carrier Sense Multiple Access)方式がある。CSMA方式は、各車両が共通の通信路(周波
数)を利用して通信路が空いているときに送信を開始する通信方式である。したがって、車両の数が増えると通信の衝突が多発し適切に情報の送信が行えなくなる。
【0003】
そこで、通信量の削減を図るために、状況に応じてデータ送信頻度を変化させる技術が開示されている。特許文献1では、車両速度が遅い場合にデータ送信頻度を低くし、車両速度が速い場合にデータ送信速度を高くするアルゴリズムが提案されている。これは、車両速度が遅いほど状況の変化が少ないため、頻繁に情報を通知しなくても良いためである。また、特許文献2では、車両速度に応じて送信頻度を変更することに加えて、減速中にはそれほど送信頻度を低くしないことが開示されている。これは、急減速を行ったときに後続車両との通信の遅延を防止するためである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−165806号公報
【特許文献2】特開2008−245268号公報
【特許文献3】特開2001−45013号公報
【特許文献4】特開2008−11343号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような従来技術は、追突事故防止などのための車車間通信を行う場合に、送信頻度差によって効果的に事故を防止することができないという問題がある。たとえば、渋滞の最後尾にいる車両は車両速度が低いため、送信頻度が低く設定される。したがって、後方から速い速度で接近してくる後続車両に対して、自車の存在を通知するタイミングが遅れてしまうおそれがある。これによって、追突を防止するための警告や自動制御の開始タイミングが遅れてしまうおそれがある。
【0006】
なお、特許文献2でも後続車両との送信頻度差(速度差)から生じる通信遅延の防止を目的としているが、この技術は、ほぼ同じ速度で走行している前方車両が減速した状況でしか有効ではない。
【0007】
本発明は上記の問題点を考慮してなされたものであり、その目的は、速度差のある車両との間でも必要な通信を確保でき、かつ、通信量を軽減可能な車載無線通信装置および車車間通信方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために本発明では、以下の手段または処理によって車車間通信を行う。
【0009】
本発明に係る車載無線通信装置は、情報を送信する送信手段と、他車両からの情報を受
信する受信手段と、自車両の速度を検出する自車速度検出手段と、自車両の速度が遅いほど送信手段の送信頻度を低く設定する送信制御手段を備える。ここで、他車両が送信する情報にはその車両の走行速度が含まれており、したがって受信情報から周囲の車両の車速を判断可能である。そして、自車両よりも速い車両からの情報を受信した場合に、送信制御手段は、自車速度に応じて設定された送信頻度にかかわらず送信手段によって直ちに応答を送信するとともに、今後の送信頻度をこの他車両の速度に応じた頻度に設定する。
【0010】
このように、自車速度が遅いほど送信頻度を低く抑えることで通信量の削減が図れる。また、自車両よりも速い他車両から情報を受信したときに、即座に応答を返すとともに、それ以降は相手車両の速度に応じた送信頻度で通信を行うので、相手車両との間で必要な通信を行える。
【0011】
また、本発明において、他車両からの情報に位置、走行方向および走行速度の情報が含まれ、送信制御手段は、受信手段が自車両よりも速い他車両から情報を受信し、かつ、この他車両が自車両にとって危険であると判断できる場合に、上述した応答処理および相手車両に合わせた送信頻度変更処理を行うことが好ましい。
【0012】
このように、他車両に対して応答する必要があると判断できる場合(他車両が自車両にとって危険な場合)のみ応答処理および送信頻度の変更を行うことで、通信量の増加を最低限に抑えることができる。
【0013】
他車両が自車両にとって危険であるか否かの判断は、たとえば、次のようにして行うことができる。すなわち、自車両が車群の最後尾に位置し、かつ、他車両が後方から自車両に向かって接近(自車速度よりも速い速度で走行)している場合に、この他車両が自車両にとって危険であると判断することができる。言い換えると、追突事故が起きうる状況を危険な状況として判断できる。上記以外に、自車両と他車両との間で左折巻き込みや右直事故、出会い頭衝突などが起きうる状況を、他車両が自車両にとって危険な例として挙げることができる。
【0014】
また、本発明において、送信制御手段は、車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、応答処理および送信頻度変更処理を行うことが好ましい。たとえば、車群の最後尾に自車両を含めて3台の車両が存在する場合には、各車両が3分の1の確率で応答処理および送信頻度変更処理を行う。応答する確率は、最後尾車両数分の1とする必要はなく、最後尾車両数が多いほど小さい値であれば十分である。
【0015】
車群の最後尾に複数台の車両が存在する場合に、各車両が即座に応答すると、通信の衝突が発生し適切に通信が行えないことが考えられる。そこで、上記のように台数に応じた確率で応答処理および送信頻度変更処理を行うことで、複数台の車両が一斉に応答して通信に支障をきたす可能性を減少できる。
【0016】
なお、本発明は、上記手段の少なくとも一部を有する車載無線通信装置として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車車間通信方法、または、この方法を実現するためのコンピュータプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0017】
本発明によれば、速度差のある車両との間でも必要な通信を確保できるとともに、通信量を軽減できる。
【図面の簡単な説明】
【0018】
【図1】第1,2の実施形態における車載無線通信装置の構成を示す図である。
【図2】車両情報パケットのデータ構造を示す図である。
【図3】車速に応じた送信周期を示す図である。
【図4】第1の実施形態の処理が適用される状況を説明する図である。
【図5】第1の実施形態における通信処理の流れを示すフローチャートである。
【図6】第2の実施形態の処理が適用される状況を説明する図である。
【図7】第2の実施形態における通信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0019】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
(第1の実施形態)
〈装置構成〉
まず、本実施形態に係る車車間無線通信システムの概要を説明する。本実施形態における車車間無線通信システムでは、各車両(車載無線通信装置)が定期的に、周囲の車両に対して車両情報を送信する。この車両情報には、自車両の位置、走行方向、走行速度などが含まれる。したがって、システム内のそれぞれの車両は、周囲に存在する車両の位置やその走行速度などの情報を取得することができる。そして、たとえば、自車両と他車両との位置関係や相対速度などから、自車両が危険な状況か否かを判断できる。危険な状況では、ドライバーに警告を発したり、運転に介入したりすることで安全運転が実現できる。
【0020】
本実施形態における車載無線通信装置の構成を、図1を参照して説明する。車載無線通信装置は、アンテナ1、受信部2、送信部3、送信間隔設定部4、車速センサ5、GPS装置6、地図データ格納部7を備える。
【0021】
受信部2はアンテナ1を介して他車両からの車両情報を受信する。送信部3はアンテナ1を介して周囲の車両に対して車両情報を送信する。送信部3は定期的に(一定周期で)車両情報の送信を行う。
【0022】
本システムにおける各車両は、無線通信方式としてCSMA方式を採用している。CSMA方式では、パケットの送信に先立ってキャリアセンスを行い、通信路が空いていることが確認できてからパケットの送信が行われる。
【0023】
図2に、車両間でやりとりされる車両情報パケットのデータ構造を示す。この車両情報20には、車両ID21、位置22、走行方向23、走行速度24などが含まれる。位置22および走行方向23はGPS装置6によって取得可能である。走行速度24は車速センサ5によって取得可能である。なお、他車両から受信した車両情報は上述したように安全運転などのために用いられるが、その説明は省略する。
【0024】
送信間隔設定部4は、基本的に自車両の速度に応じて送信周期(送信頻度)を設定する。送信周期の設定例を図3に示す。図3に示すように、自車速度が速いほど送信周期を短くして、送信頻度を高く設定する。逆に、自車速度が遅いほど送信周期を長くして、送信頻度を低く設定する。
【0025】
送信間隔設定部4は、自車両よりも速い速度の車両から情報を受信し、この車両に対して応答する必要がある場合には、自車速度に応じて設定された送信周期にかかわらず即座に応答するとともに、送信周期をこの相手車両の速度に応じた周期に変更する。
【0026】
相手車両の速度が自車両よりも速いか否かは、相手車両から送られる車両情報(走行速度24)を解析することで判断できる。また、相手車両に対して応答する必要があるか否かは、相手車両が自車両にとって危険であるかを認識することで判断できる。相手車両が
自車両にとって危険な状況とは、たとえば図4に示すように、自車両101が渋滞(車群)の最後尾に位置し、同じ道路の後方から相手車両102が高速で接近してくる状況が考えられる。自車両が渋滞(車群)の最後尾に位置するか否かは、周囲の車両と車両情報を交換して得られる各車両の位置関係から判断可能である。相手車両が同じ道路の後方から接近しているか否かは、GPS装置6から得られる自車両の位置と、相手車両から送信される車両情報に含まれる位置22と、地図データ格納部7に格納されている地図データに基づいて判断可能である。
【0027】
相手車両が自車両にとって危険な状況としては上記のような追突事故の可能性がある状況以外に、右直事故や出会い頭衝突事故や左折巻き込み事故の可能性がある状況を例として挙げることができる。このような状況にあるか否かは、GPS装置6から得られる自車両の位置と、相手車両から送信される車両情報に含まれる位置・走行速度・走行方向などの情報、および地図データを参照することで判断可能である。
【0028】
このように、相手車両が自車両にとって危険である場合には、送信部3から即座に自車両の車両情報が送信される。相手車両は送信される車両情報を受信することで危険な状況であると判断でき、ドライバーに対する警告や運転への介入制御を行い、事故を未然に防ぐことができる。自車両が停止中や低速走行している場合には送信間隔が長く設定されており、自車速度に基づく送信タイミングを守ってしまうと相手車両への応答が遅れ、危険な状況に適切に対処できなく可能性がある。本実施形態では、即座に応答を返すことで危険回避の遅延を防止できる。また、即座に応答を返すだけでなく、それ以降は相手車両の速度に合わせた送信頻度に設定するため、この車両との間で適切な通信を確保できる。
【0029】
〈処理フロー〉
次に、本実施形態における各車載通信装置の通信処理を、図5のフローチャートを参照しつつ説明する。
【0030】
まず、車速センサ5から自車両の速度を検出する(ステップS101)。そして、送信間隔設定部4は、図3に示すように自車両速度に応じた送信頻度を設定する(ステップS102)。これ以降、送信部3は、この設定された送信頻度で自車両の車両情報(位置や車速等)を送信する。
【0031】
次に、受信部2は他車両からの車両情報を受信する(ステップS103)。送信間隔設定部4は、収集した他車両の情報から、自車両が渋滞(車群)の最後尾に位置するか、および、後方から高速に接近する車両が存在するか判断する(ステップS104)。車両情報には各車両の位置情報が含まれるため、自車両が渋滞の最後尾に存在するか否かを判断できる。また、車両情報に位置・走行方位・走行速度が含まれるので、自車両と同じ道路上を、同じ方向に、自車両よりも高速に走行している車両が存在するか否かも判断可能である。
【0032】
自車両が渋滞の最後尾に位置しないか、後方から高速接近する車両が存在しない場合(S104:NO)は、ステップS101に戻る。
【0033】
一方、自車両が渋滞の最後尾に位置し、かつ、後方から高速接近する車両が存在する場合(S104:YES)は、自車速度に応じた送信頻度(送信タイミング)にかかわらず、送信部3は即座に応答を送信する(ステップS105)。また、ハザードランプを自動点灯させて接近車両に注意を促す(ステップS106)。そして、送信間隔設定部4は、高速接近する車両の速度に応じて送信頻度の設定を行う(ステップS107)。これ以降、送信部3は、この相手車両の速度に応じて設定された送信頻度で自車両の車両情報を送信する。そして、接近車両が自車の速度よりも速い間(S108:YES)は、相手車両
の速度に応じて送信頻度の設定を行う。接近車両の速度が自車と同じかそれ以下になったら、ステップS101へ戻る。
【0034】
〈動作例〉
図4に示すように、自車両101が渋滞の最後尾に位置する状況を例に説明する。まず、自車速度の検出が行われる(S101)。ここでは、車両101は渋滞の最後尾に位置するため、停止または時速10km以下の低速度で走行しているとする。この速度に対する送信頻度として、1200ミリ秒(1.2秒)に1回の送信頻度が設定される(S102、図3)。したがって、車両101は1.2秒に1回の頻度で自車両に関する情報を周囲に送信する。
【0035】
また、車両101は周囲の車両からの車両情報を受信し、解析する(S103)。受信する車両情報から、周囲の車両と自車両との位置関係が把握可能であり、車両101は車群(渋滞)の最後尾に位置することが分かる。
【0036】
また、車両102からの車両情報を受信・解析することで、この車両102が後方から高速で接近しつつあることが判断できる。したがって、自車両は渋滞の最後尾に位置し、かつ、自車両に高速で後方から接近する車両が存在する(S104:YES)ことが分かる。そこで、車両101は、車両102に対して即座に自車両情報を応答として送信する(S105)とともに、ハザードランプを点灯させる(S106)。そして、車両102の速度に合わせて自車両の送信頻度の変更を行う(S107)。ここで、車両102が時速100kmで走行しているのであれば、車両101は100ミリ秒に1回の割合で車両情報を送信する。これにより、車両101と車両102は同じ送信頻度で情報の送信が行え、両車両間で適切な通信が確保される。
【0037】
車両102は、車両101からの情報を受信することで前方に低速車両が存在することが分かり、ドライバーに対して警告処理や自動減速制御などをおこなって事故を防止する。このように車両102は次第に走行速度を落としていく。車両101はそれに合わせて送信頻度の変更を行う(S107、S108)。最終的に車両102は車両101と同じ速度まで減速し、車両101は通常の制御に戻る。
【0038】
〈実施形態の作用/効果〉
本実施形態によれば、各車両は自車速度に応じた送信頻度で定期的に自車情報を送信している。ここで、自車速度が低速であるほど送信頻度を低く設定している。したがって、各車両の通信量を減らすことができ、通信の衝突などの問題が生じない好適な通信が実現できる。なお、車速が遅い場合には状況の変化が大きくないため、送信頻度を少なくしても問題は生じない。
【0039】
また、自車速度が低速で送信頻度が低く設定されている場合でも、危険な車両が高速に接近している状況など必要な場合には即座に応答するので、この高速な車両に対して危険を通知するタイミングに遅れが生じない。したがって、事故防止などを適切に実現できる。また、このような危険な状況では、高速で接近する相手車両の車速に合わせた送信頻度に設定することで、その後も自車両と相手車両との間で通信を確保することができる。
【0040】
(第2の実施形態)
本実施形態では、第1の実施形態において複数の車両が高速接近車両(危険車両)に対して応答する可能性がある状況に対処する。たとえば、図6に示すよう状況では、3車線の道路で渋滞が発生しており、その最後尾に車両201A〜Cの3台の車両が存在する。ここに後方から車両202が高速で接近する状況を考える。この場合、第1の実施形態による制御では、車両201A〜Cのそれぞれが車両202に対して即座に応答を返そうと
してしまう。このように複数の車両が一斉に送信を始めると、通信が衝突してうまく車両202まで伝わらない。本実施形態では、このような状況に対処するために、最後尾の車両数を考慮して応答確率を減らして、一斉応答による通信衝突を回避する。
【0041】
本実施形態における車載無線通信システムの機能構成は第1の実施形態(図1)と同様であるため説明は省略する。本実施形態における通信処理の流れを、図7のフローチャートを参照しつつ説明する。
【0042】
図7のステップS201〜S205までは第1の実施形態と同様の処理である。簡単に説明すると、自車の速度に応じて送信頻度を設定(S201,S202)し、他車両からの情報を受信して危険な状況であるか否かを判断する(S203,204)。
【0043】
自車両が渋滞の最後尾に位置し、かつ、自車両に高速に接近する車両があると判断された場合(S204:YES)は、まずハザードランプを自動的に点灯させる(S205)。ここまでは第1の実施形態と同様であるが、次に、同時に応答する周辺車両の数を予測して、応答確率を設定する(S206)。同時に応答する周辺車両の数は、渋滞の最後尾に隣接車両が何台存在するかを判断することで行える。なお、この判断は周囲の車両と情報交換をしているので把握可能である。また、単純に地図データから現在走行中の道路の車線数を取得し、その車線数を同時応答車両数とみなしても構わない。そして、たとえば自車両を含めて3台の車両が応答すると予測された場合は、応答確率として1/3を設定する。なお、応答確率の設定例は1/(応答車両数)に限られず、応答車両数が多いほど応答確率を少なく設定すれば十分である。
【0044】
応答確率を設定したら、乱数などにより抽選を行い実際に応答するか否かを決定する(S207)。応答しないと判定された場合(S207:NO)は、ステップS201に戻って通常通りの処理を継続する。応答すると判定された場合(S207:YES)は、自車速度に応じた送信頻度(送信タイミング)にかかわらず、送信部3は即座に応答を送信する(ステップS208)。そして、送信間隔設定部4は、高速接近する車両の速度に応じて送信頻度の設定を行う(ステップS209)。これ以降、送信部3は、この相手車両の速度に応じて設定された送信頻度で自車両の車両情報を送信する。そして、接近車両が自車の速度よりも速い間(S210:YES)は、相手車両の速度に応じて送信頻度の設定を行う。接近車両の速度が自車と同じかそれ以下になったらステップS201へ戻る。
【0045】
このようにすることで、複数の車両が同時に応答することによる通信の衝突を確率を減らすことができる。なお、最後尾車両のそれぞれは独立で判断を行っているため、複数の車両が一斉に応答することもあり得るが、その可能性や同時応答車両数を減らすことができるので効果的である。
【0046】
また、いずれかの車両が高速接近車両に応答したことを、周囲の車両は通信を傍受することで把握できる。したがって、周囲の車両はそれ以降、この高速接近車両から車両情報を受信しても即座の応答や送信頻度変更処理などを行わないことができる。
【符号の説明】
【0047】
2 受信部
3 送信部
4 送信間隔設定部
5 車速センサ
6 GPS装置
7 地図データ格納部
【特許請求の範囲】
【請求項1】
情報を送信する送信手段と、
他車両からの情報を受信する受信手段と、
自車両の速度を検出する自車速度検出手段と、
自車両の速度が遅いほど前記送信手段の送信頻度を低く設定する送信制御手段と、
を備え、
前記他車両からの情報には、当該他車両の走行速度が含まれており、
前記受信手段が自車両よりも速い他車両から情報を受信した場合に、前記送信制御手段は、設定された送信頻度にかかわらず前記送信手段によって直ちに応答を送信し、前記送信手段の送信頻度を当該他車両の速度に応じた頻度に設定する
ことを特徴とする車載無線通信装置。
【請求項2】
前記他車両からの情報には、当該他車両の位置、走行方向および走行速度が含まれており、
前記送信制御手段は、前記受信手段が自車両よりも速い他車両から情報を受信し、かつ、当該他車両が自車両にとって危険であると判断できる場合に、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項1に記載の車載無線通信装置。
【請求項3】
前記送信制御手段は、自車両が車群の最後尾に位置し、かつ、前記他車両が後方から自車両に向かって接近している場合に、当該他車両が自車両にとって危険であると判断する
ことを特徴とする請求項2に記載の車載無線通信装置。
【請求項4】
前記送信制御手段は、車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項3に記載の車載無線通信装置。
【請求項5】
周囲の車両に対して定期的に情報を送信する車車間通信方法であって、
他車両から、当該他車両の走行速度を含む情報を受信する受信工程と、
自車両の速度を検出する自車速度検出工程と、
自車両の速度が遅いほど送信頻度を低く設定する送信制御工程と、
を含み、
自車両よりも速い他車両からの情報を受信した場合に、設定された送信頻度にかかわらず直ちに応答を送信するとともに、その後の送信頻度を当該他車両の速度に応じた頻度に設定する
ことを特徴とする車車間通信方法。
【請求項6】
前記他車両からの情報には、当該他車両の位置、走行方向および走行速度が含まれており、
自車両よりも速い他車両から情報を受信し、かつ、当該他車両が自車両にとって危険であると判断できる場合に、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項5に記載の車車間通信方法。
【請求項7】
自車両が車群の最後尾に位置し、かつ、前記他車両が後方から自車両に向かって接近している場合に、当該他車両が自車両にとって危険であると判断する
ことを特徴とする請求項6に記載の車車間通信方法。
【請求項8】
車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項7に記載の車車間通信方法。
【請求項1】
情報を送信する送信手段と、
他車両からの情報を受信する受信手段と、
自車両の速度を検出する自車速度検出手段と、
自車両の速度が遅いほど前記送信手段の送信頻度を低く設定する送信制御手段と、
を備え、
前記他車両からの情報には、当該他車両の走行速度が含まれており、
前記受信手段が自車両よりも速い他車両から情報を受信した場合に、前記送信制御手段は、設定された送信頻度にかかわらず前記送信手段によって直ちに応答を送信し、前記送信手段の送信頻度を当該他車両の速度に応じた頻度に設定する
ことを特徴とする車載無線通信装置。
【請求項2】
前記他車両からの情報には、当該他車両の位置、走行方向および走行速度が含まれており、
前記送信制御手段は、前記受信手段が自車両よりも速い他車両から情報を受信し、かつ、当該他車両が自車両にとって危険であると判断できる場合に、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項1に記載の車載無線通信装置。
【請求項3】
前記送信制御手段は、自車両が車群の最後尾に位置し、かつ、前記他車両が後方から自車両に向かって接近している場合に、当該他車両が自車両にとって危険であると判断する
ことを特徴とする請求項2に記載の車載無線通信装置。
【請求項4】
前記送信制御手段は、車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項3に記載の車載無線通信装置。
【請求項5】
周囲の車両に対して定期的に情報を送信する車車間通信方法であって、
他車両から、当該他車両の走行速度を含む情報を受信する受信工程と、
自車両の速度を検出する自車速度検出工程と、
自車両の速度が遅いほど送信頻度を低く設定する送信制御工程と、
を含み、
自車両よりも速い他車両からの情報を受信した場合に、設定された送信頻度にかかわらず直ちに応答を送信するとともに、その後の送信頻度を当該他車両の速度に応じた頻度に設定する
ことを特徴とする車車間通信方法。
【請求項6】
前記他車両からの情報には、当該他車両の位置、走行方向および走行速度が含まれており、
自車両よりも速い他車両から情報を受信し、かつ、当該他車両が自車両にとって危険であると判断できる場合に、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項5に記載の車車間通信方法。
【請求項7】
自車両が車群の最後尾に位置し、かつ、前記他車両が後方から自車両に向かって接近している場合に、当該他車両が自車両にとって危険であると判断する
ことを特徴とする請求項6に記載の車車間通信方法。
【請求項8】
車群の最後尾に位置する車両が複数台存在する場合には、その台数に応じた確率で、前記応答処理および送信頻度変更処理を行う
ことを特徴とする請求項7に記載の車車間通信方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−288141(P2010−288141A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−141297(P2009−141297)
【出願日】平成21年6月12日(2009.6.12)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月12日(2009.6.12)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]