
車載用の警告システム
【課題】ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減する。
【解決手段】警告システムが、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力するドライブレコーダ2と、(B)ドライブレコーダ2に接続されるインターフェースと、(C)インターフェースに接続され、自車両の現在位置を繰り返し特定し、ドライブレコーダ2が出力した検出信号を、インターフェースを介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の位置情報を記録する車両用ナビゲーション装置1と、を備え、車両用ナビゲーション装置1は、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告する。
【解決手段】警告システムが、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力するドライブレコーダ2と、(B)ドライブレコーダ2に接続されるインターフェースと、(C)インターフェースに接続され、自車両の現在位置を繰り返し特定し、ドライブレコーダ2が出力した検出信号を、インターフェースを介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の位置情報を記録する車両用ナビゲーション装置1と、を備え、車両用ナビゲーション装置1は、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用の警告システムに関する。
【背景技術】
【0002】
従来、運転者が危険行為を行った地点において再度同じような危険行為を行わないように警告する技術が、例えば特許文献1に記載されている。特許文献1においては、車両用ナビゲーション装置が、自車両の加速度等に基づいてドライバーの運転操作に危険行為があったか否かを判定し、危険行為があった場合、その危険行為の地点の情報を記録する。そして、自車両が当該地点に近づいたときに、警告を発する。
【0003】
特許文献1に記載のこの技術は、危険行為の検出、危険行為のあった地点の特定、当該地点の記録、自車両の当該地点への接近判定、および警告のための処理を、1つの制御回路によって実現している。
【特許文献1】特開2002−221428号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載のこの技術は、危険行為の検出、危険行為のあった地点の特定、当該地点の記録、自車両の当該地点への接近判定、および警告のための処理を、1つの制御回路によって実現しているので、その制御回路にかかる負荷が大きくなってしまうという問題がある。
【0005】
本発明は上記点に鑑み、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本発明の特徴は、車両に搭載される警告システムが、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力する検出装置と、(B)検出装置に接続されるインターフェース装置と、(C)インターフェース装置に接続され、自車両の現在位置を繰り返し特定し、検出装置が出力した検出信号を、インターフェース装置を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の危険位置情報を記録する取得装置と、を備え、取得装置は、特定した現在位置に、過去に記録した危険位置情報の示す位置が、近いことに基づいて、ユーザに警告することである。
【0007】
このように、検出装置と取得装置とがインターフェース装置を介して互いに接続され、検出装置が危険運転の検出の機能を担い、取得装置が、危険運転のあった位置を記録する機能および当該位置に自車両が近いときに警告する機能を担う。このようになっていることで、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することができるようになる。
【0008】
また、検出装置は、危険運転の検出時の自車両の位置情報を、検出信号として出力し、取得装置は、検出装置が出力した位置情報を、インターフェース装置を介して取得して危険位置情報として記録するようになっていてもよい。このように、危険運転の検出信号そのものに、危険運転のあった位置の情報が含まれることで、取得装置側の処理負担がより軽減される。
【0009】
また、検出装置は、取得装置が特定する現在位置の情報を、インターフェース装置を介して取得し、危険運転を検出したとき、そのように取得した現在位置の情報を、危険運転の検出時の車両の位置情報として出力するようになっていてもよい。このように、取得装置への検出信号に含める位置情報が、元々取得装置によって特定された現在位置情報となっている。このようになっていることで、取得装置は、現在位置を特定するにしても、危険運転が発生した時点と、その時点における現在位置とを対応付けるための処理を行う必要がなくなるので、その分負荷が軽減される。また、検出装置も、自らが現在位置を特定するためのセンサを有する必要がなくなるので、構成が簡易になる。
【0010】
ところで、危険行為のあった位置の記録を精度よく行うためには、危険行為の発生の検出タイミングと、自車両の現在位置の特定タイミングとが近い方が望ましい。上述のように、危険運転のあった位置の特定のための現在位置を取得装置が特定する場合、危険運転があってから取得装置が現在位置を特定するように構成することが考えられる。しかしながら、危険行為はいつ発生するかわからず、その発生時機を予測することが難しい。したがって、危険行為が発生したときに取得装置が他の処理を実行しており、そのために検出装置に取得させるための現在位置を特定する処理が遅れてしまう場合もあり得る。
【0011】
そこで、取得装置は、特定した現在位置の情報を記憶媒体に記録し、検出装置は、現在位置の情報を取得するために、インターフェース装置に要求信号を出力し、インターフェース装置は、要求信号を検出装置から受けたことに基づいて、取得装置が記録した現在位置の情報を記憶媒体から読み出し、読み出した情報を検出装置に出力するようになっていてもよい。
【0012】
このようになっていることで、検出装置が危険行為を検出したときに、取得装置が特定した位置情報を検出装置に渡す役割を、インターフェース装置が担うので、危険運転の発生時に取得装置が他の処理を行っていたとしても、検出装置は滞りなく位置情報を取得することができる。
【0013】
また、検出装置は、取得装置が特定する現在位置の情報を、インターフェース装置を介して繰り返し取得し、さらに、現在位置の情報の取得と同期して、危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力するようになっていてもよい。このように、現在位置の情報の取得と危険運転の判定とが同期しているので、危険運転の発生した位置の特定の精度が向上する。
【0014】
なお、ここでいう「取得と判定が同期する」とは、取得のタイミングと判定のタイミングが時間的にほぼ一致することのみならず、繰り返し行われる取得と判定において、取得タイミングと判定タイミングとが交互に訪れるようになっている場合、すなわち、取得と判定のタイミングが1対1に対応している場合も含む概念である。
【0015】
また、検出装置は、危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、記憶媒体に記録するようになっていてもよい。このような機能を有する検出装置は、ドライブレコーダともいう。
【0016】
また、検出装置は、危険運転の検出時において、自車両の周囲を撮影するカメラから受けた撮影画像を、位置情報と共に出力し、取得装置は、検出装置が出力した撮影画像を、インターフェース装置を介して取得して記録し、現在位置に、過去に記録した危険位置情報の示す位置が、近いことに基づいて、位置情報と共に取得した撮影画像を画像表示装置に表示させることで、ユーザに警告するようになっていてもよい。
【0017】
このようになっていることで、過去に撮影された危険運転時の撮影画像をドライバーが再確認することができるので、ドライバーに安全運転を強く促すことができる。
【0018】
また、取得装置が、現在位置に、過去に記録した危険位置情報の示す位置が、近いこと、および、危険位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告するようになっていてもよい。このようになっていることで、より警告の対象の地点を、より警告の必要性が高いものに絞り込むことができるようになる。なお、ここでいう「同じ位置」とは、完全に一致する位置のみならず、所定の許容誤差以内の近傍にあることも含む概念である。
【0019】
また、取得装置は、複数種類の処理をタイムシェアリング方式で実行し、さらに、危険位置情報の記録を、他の処理の終了の後に実行するようになっていてもよい。このようになっていることで、位置情報の記録は、他の処理の妨げとなることがない。
【0020】
また、取得装置は、設定された目的地までの経路を地図と共に画像表示装置に表示させるナビゲーション装置であってもよい。
【発明を実施するための最良の形態】
【0021】
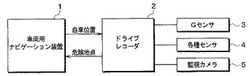
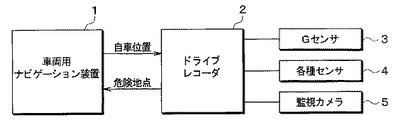
以下、本発明の一実施形態について説明する。図1に、本実施形態に係る、警告システムの概略構成を、ブロック図で示す。この警告システムは、車両に搭載され、車両用ナビゲーション装置1、ドライブレコーダ2、加速度センサ(図中ではGセンサと記す)3、各種センサ4、および監視カメラ5を含む。
【0022】
車両用ナビゲーション装置1は、入力された目的地までの経路を案内する装置である。ドライブレコーダ2は、車両の危険な運転があったときに、その危険運転時における撮影画像等を記録する装置である。加速度センサ3は、自車両の前後、上下、および左右への加速度を定期的に(例えば10ミリ秒毎に)検出し、その都度検出した結果の信号をドライブレコーダ2に出力する装置である。各種センサ4は、ヨーレートセンサ、車速センサ等、車両の危険運転を検出するために補助的に用いられるセンサ群であり、ドライブレコーダ2に各種検出信号を出力する。監視カメラ5は、定期的に(例えば1秒または0.1秒毎に)車両の前方等の車両周囲を撮影し、その撮影結果の信号をドライブレコーダ2に出力する装置である。
【0023】
以下詳述する通り、車両用ナビゲーション装置1は、繰り返し定期的に自車位置を特定し、ドライブレコーダ2は、この自車位置の情報を繰り返し定期的に取得し、さらに、自車両の危険運転を検出したときに、取得した最新の自車位置情報を、危険地点データとして、車両用ナビゲーション装置1に出力する。そして車両用ナビゲーション装置1は、この危険地点データの示す位置に自車両が近づいたとき、ドライバーに対して警告を発する。
【0024】
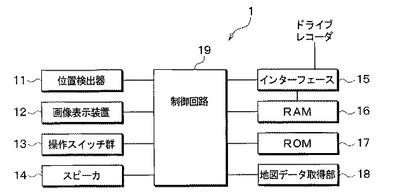
図2に、車両用ナビゲーション装置1のハードウェア構成を、ブロック図で示す。車両用ナビゲーション装置1は、位置検出器11、画像表示装置12、操作スイッチ群13、スピーカ14、インターフェース15、RAM16、ROM17、地図データ取得部18、および制御回路19を有している。
【0025】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。
【0026】
画像表示装置12は、制御回路19から出力された映像信号に基づいた映像をユーザに表示する。操作スイッチ群13は、メカニカルスイッチ、タッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチ、タッチパネル等の操作に基づいた信号を制御回路19に出力する。
【0027】
インターフェース15は、制御回路19およびドライブレコーダ2に接続されることで、制御回路19とドライブレコーダ2との間の信号のやり取りを媒介する回路である。このインターフェース15は、RAM16に対して書き込みおよび読み出しの処理を実行することができるようになっている。具体的には、インターフェース15としては、CPU、RAM、ROM、I/Oを備えた周知のマイコンを用いることができる。
【0028】
地図データ取得部18は、ハードディスクドライブ等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出しおよび書き込みを行う装置から成り、制御回路19が実行するプログラム、経路案内用の地図データ等を記憶している。
【0029】
制御回路(コンピュータに相当する)19は、ROM17および地図データ取得部18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを、タイムシェアリング方式で実行し、その実行の際にはRAM16、ROM17、および地図データ取得部18から情報を読み出し、RAM16および地図データ取得部18に対して情報の書き込みを行い、位置検出器11、画像表示装置12、操作スイッチ群13、および音声回路14と信号の授受を行う。
【0030】
制御回路19がプログラムを実行することによって行う具体的な処理としては、現在位置特定処理、誘導経路算出処理、経路案内処理等がある。
【0031】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。誘導経路算出処理は、操作スイッチ群13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出する処理である。経路案内処理は、地図データ取得部18から地図データを読み出し、算出された誘導経路、目的地、経由地および現在位置等をこの地図データの示す地図上に重ねた画像を、画像表示装置12に出力し、案内交差点の手前に自車両が到達したとき等の必要時に、右折、左折等を指示する案内音声信号をスピーカ14に出力する処理である。
【0032】
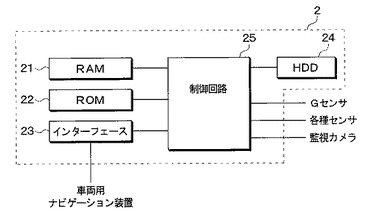
図3に、ドライブレコーダ2のハードウェア構成を、ブロック図で示す。ドライブレコーダ2は、RAM21、ROM22、インターフェース23、ハードディスクドライブ24、および制御回路25を有している。また、ドライブレコーダ2は、これら装置群21〜25をその内部に保護する筐体を有している。この筐体は、仮に車体が壊れる程の事故が発生しても、内部の装置群の破損を防ぐことができるよう、非常に堅牢な材質および構造を有している。
【0033】
ハードディスクドライブ24は、制御回路25が実行するためのプログラム、監視カメラ5が撮影した動画像のデータ、すなわち撮影データ等を記憶するための、記憶媒体である。
【0034】
インターフェース23は、制御回路25および車両用ナビゲーション装置1のインターフェース15に接続されることで、制御回路25と車両用ナビゲーション装置1との間の信号のやり取りを媒介する回路である。
【0035】
制御回路(コンピュータに相当する)25は、ROM22およびハードディスクドライブ24から読み出したドライブレコーダ2の動作のためのプログラムを実行し、その実行の際には、加速度センサ3、各種センサ4、および監視カメラ5から信号を受け、RAM21、ROM22、およびハードディスクドライブ24から情報を読み出し、RAM21およびハードディスクドライブ24に対して情報の書き込みを行う。
【0036】
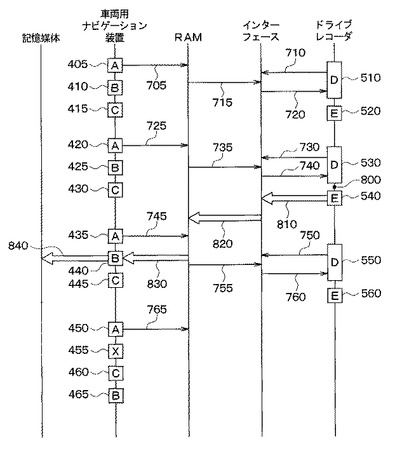
次に、以上のようなハードウェア構成の警告システムの作動について説明する。図4に、警告システム内における処理および信号出力のタイミングの一例を示す。なお、図4において、記憶媒体は、地図データ取得部18のハードディスクに相当し、車両用ナビゲーション装置は、車両用ナビゲーション装置1の制御回路19に相当し、RAMは、車両用ナビゲーション装置1のRAM16に相当し、インターフェースは、車両用ナビゲーション装置1のインターフェース15に相当し、ドライブレコーダは、ドライブレコーダ2の制御回路25に相当する。
【0037】
図4に示す通り、車両用ナビゲーション装置1の制御回路19は、実行タイミングがあらかじめ定められたスケジュールに則っているAスケジュール処理、Bスケジュール処理、Cスケジュール処理等を実行する。より具体的には、制御回路19は、割り込み処理や他の優先的な処理を実行しないときは、Aスケジュール処理、Bスケジュール処理、Cスケジュール処理を、この順に、それぞれ定期的に、実行する。
【0038】
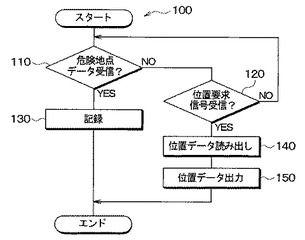
また、インターフェース15は、図5に示すプログラム100を常時繰り返し実行している。このプログラム100による処理の詳細については後述する。
【0039】
また、ドライブレコーダ2の制御回路25は、実行タイミングがあらかじめ定められたスケジュールに則っているDスケジュール処理、Eスケジュール処理を実行する。より具体的には、制御回路25は、Dスケジュール処理、Eスケジュール処理を、この順に、それぞれ定期的に(例えば、監視カメラ5の撮影周期と同じ周期で)、実行する。なお、Dスケジュール処理の終了からEスケジュール処理の開始までの時間間隔は、基準時間間隔(例えばスケジュール処理D、Eの実行周期の1/100等)であってもよい。
【0040】
タイミング405、420、435、450に実行されるAスケジュール処理において、制御回路19は、上述の現在位置特定処理を実行し、それによって特定した自車両の現在位置のデータを、RAM16の位置情報用の領域に格納する(信号705、725、745、765参照)。
【0041】
また、タイミング510、530、550に実行されるDスケジュール処理において、制御回路25は、まず、インターフェース23を用いて、位置要求信号をインターフェース15に出力し(信号710、730、750参照)、その応答としてインターフェース23を介してインターフェース15から位置データを受信するまで待つ。
【0042】
また、インターフェース15は、プログラム100の実行において、後述する危険地点データを受信するか(ステップ110参照)、または、上述の位置要求信号を受信するまで(ステップ120参照)待つ。そして、位置要求信号を受信すると、続いて、RAM16の位置情報用の領域に格納されている最新の現在位置データを読み出す(ステップ140、信号715、735、755参照)。そして更に、読み出したデータを、位置データとして、ドライブレコーダ2に出力する(信号720、740、760参照)。
【0043】
そして、ドライブレコーダ2の制御回路25は、上述のDスケジュール処理において、位置データを受信すると、その位置データをRAM21または制御回路25内のレジスタに記録し、Dスケジュール処理を終了する。
【0044】
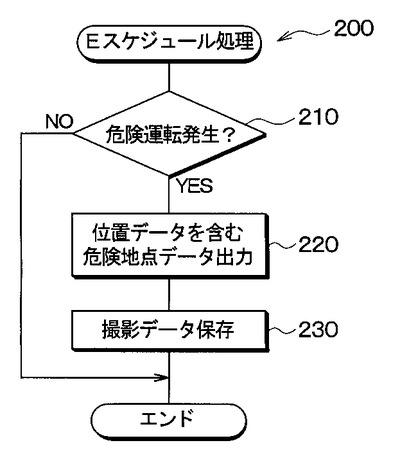
制御回路25は、Dスケジュール処理を終了すると、続けてEスケジュール処理を開始する。制御回路25は、このEスケジュール処理のために、図6に示すプログラム200を実行し、その実行において、危険運転が発生したと判定すると(ステップ210参照)、続いて位置データを含む危険地点データをインターフェース15に出力し(ステップ220参照)、さらに続いて撮影データをハードディスクドライブ24に記録し(ステップ230参照)、その後Eスケジュール処理を終了する。また、危険運転が発生していないと判定すると(ステップ210参照)その後すぐにEスケジュール処理を終了する。
【0045】
ここで、危険運転が発生したか否かの判定は、主に加速度センサ3からの信号に基づいて行う。具体的には、ハードディスクドライブ24中に記録されている加速度閾値の値と、加速度センサ3から出力された最新の信号に対応する加速度の大きさの値とを比較し、後者の方が大きい場合は危険運転が発生したと判定し、それ以外の場合は危険運転が発生していないと判定する。
【0046】
また、危険地点データに含める位置データは、直前のDスケジュール処理によってRAM21に記録されたものを用いる。
【0047】
また、ここでハードディスクドライブ24に記録する撮影データは、危険運転が発生したと判定した時点の前後の期間における撮影データである。このために、制御回路25は、過去所定時間内に監視カメラ5から取得した撮影データを、RAM21に保持するようになっている。
【0048】
ここで、図4に示すように、タイミング800およびその後の期間(例えば1秒間)において危険運転があった場合を考える。この場合、タイミング540におけるEスケジュール処理において、制御回路25は、危険運転の発生を検出し、タイミング530で取得した位置情報を含む危険地点データをインターフェース15に出力する(信号810参照)。
【0049】
またインターフェース15は、プログラム100の実行において、危険地点データを受信したと判定すると(ステップ110参照)、続いて、受信した危険地点データをRAM21の危険地点データ用の領域に記録する(ステップ130、信号820参照)。
【0050】
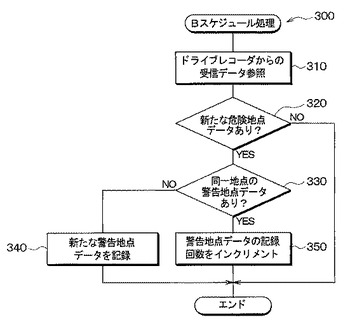
また、制御回路19は、タイミング410、425、440、465に実行されるBスケジュール処理のために、図7に示すプログラム300を実行する。そして、このプログラム300の実行において、まず、ドライブレコーダ2からの受信データを参照するため、RAM21の危険地点データ用の領域の内容を読み出す(ステップ310参照)。そして、その読み出した内容が、前回の内容と異なっているか否か(すなわち新しいか否か)によって、新たな危険地点データがあるか否かを判定する(ステップ320参照)。新たな危険地点がない場合は、その後Bスケジュール処理を終了する。
【0051】
図4のタイミング440においては、ステップ310で危険地点データ用の領域を読み出し(信号830参照)、その内容に基づいて、新たな危険地点データがあると判定し、その判定に基づいて、続いて、当該危険地点データ中の位置データ(以下、新規位置データという)と、地図データ取得部18のハードディスク中のすべての警告地点データ中の位置データ(以下、過去位置データという)とを比較し、新規位置データと同じ位置を示す過去位置データがあるか否かを判定する(ステップ330参照)。
【0052】
ここで、同じ位置であるか否かは、比較対象の2つの位置の間の距離間隔が、基準距離間隔(例えば10メートル)以内であるか否かに基づいて判定する。
【0053】
そして、新規位置データと同じ位置を示す過去位置データがない場合、当該新規位置データと、1回を示す回数データとを含む新たな警告地点データ(危険位置情報の一例に相当する)を、地図データ取得部18のハードディスクに記録し(ステップ340、信号840参照)、その後Bスケジュール処理を終了する。
【0054】
また、新規位置データと同じ位置を示す過去位置データがある場合、当該過去位置データと共に警告地点データに含まれる回数データの値を、1回分だけ増加させ(ステップ350、信号840参照)、その後Bスケジュール処理を終了する。
【0055】
以上のように、車両用ナビゲーション装置1は、繰り返し現在位置を特定して位置データとしてRAM21に記録し、ドライブレコーダ2はRAM21に記録された最新の位置データをインターフェース15を介して繰り返し取得する。そして、最新の位置データを取得した直後に、危険運転の有無を判定し、危険運転があれば、当該最新の位置データを危険地点データに含めて車両用ナビゲーション装置1に出力する。そして、車両用ナビゲーション装置1は、受信した危険地点データ中の位置を、その位置毎の受信回数と共に、警告データとして、長期保存可能な記憶媒体としてのハードディスクに記録する。
【0056】
また、制御回路19は、タイミング415、430、445、460に実行されるCスケジュール処理において、Aスケジュール処理によってRAM21に記録された最新の現在位置に基づいて、自車両が危険運転の恐れのある位置に近づいているか否かを判定し、近づいているときは、続いて、画像表示装置12およびスピーカ14に、安全運転を促す警告のための画像および音声を、それぞれ出力させる。また、自車両が危険運転のあった位置に近づいていないときは、その後Cスケジュール処理を終了する。
【0057】
ここで、危険運転の恐れのある位置とは、地図データ取得部18のハードディスク中の警告地点データのうち、回数データが警告基準回数以上となっているものが示す位置である。このような警告によって、ユーザの安全運転の意識が高まり、危険な運転の発生を未然に防ぐことができる。
【0058】
なお、Bスケジュール処理の実行タイミング460およびCスケジュール処理の実行タイミング465は、スケジュールされた実行タイミングより遅れている。これは、タイミング455に、Bスケジュール処理より優先度が高いX処理(例えばユーザの入力受け付け処理、等)を制御回路19が実行していることに起因するものである。この場合、当該他の処理、および、Cスケジュール処理等が終了して、制御回路19がアイドル状態となったときに、Bスケジュール処理の実行が始まる。
【0059】
Bスケジュール処理によって追加または更新される警告データの位置に再度自車両が到達するまでには、図4に示したような処理の実行間隔に比べて遥かに大きい時間が経過することが通常である。その意味では、Bスケジュール処理を、他の処理に優先させて行う必要性は低い。
【0060】
他方、危険運転の発生した地点を精度良く特定するには、危険運転の発生タイミングと、現在位置特定のタイミングとが近接していることがより好ましい。その意味では、車両用ナビゲーション装置1におけるスケジュール処理Aの優先度は、他の処理よりも高くなっていてもよい。また、加速度センサ3におけるスケジュール処理Dの実行タイミングと、スケジュール処理Eの実行タイミングとは、同期していてもよく、かつ、非常に近接していてもよい。
【0061】
以上説明した通り、本実施形態の警告システムは、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力するドライブレコーダ2と、(B)ドライブレコーダ2に接続されるインターフェース15と、(C)インターフェース15に接続され、自車両の現在位置を繰り返し特定し、ドライブレコーダ2が出力した検出信号を、インターフェース15を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の位置情報を記録する車両用ナビゲーション装置1と、を備え、車両用ナビゲーション装置1は、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告する。
【0062】
このように、ドライブレコーダ2と車両用ナビゲーション装置1とがインターフェース15を介して互いに接続され、ドライブレコーダ2が危険運転の検出の機能を担い、車両用ナビゲーション装置1が、危険運転のあった位置を記録する機能および当該位置に自車両が近いときに警告する機能を担う。このようになっていることで、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することができるようになる。そして、元々ドライブレコーダ2が有している危険運転の検知の機能を利用することで、車両用ナビゲーション装置1の処理の負荷が軽減される。
【0063】
また、ドライブレコーダ2は、危険運転の検出時の自車両の位置情報を、検出信号として出力し、車両用ナビゲーション装置1は、ドライブレコーダ2が出力した位置情報を、インターフェース15を介して取得して記録するようになっている。このように、危険運転の検出信号そのものに、危険運転のあった位置の情報が含まれることで、車両用ナビゲーション装置1側の負担がより軽減される。
【0064】
また、ドライブレコーダ2は、車両用ナビゲーション装置1が特定する現在位置の情報を、インターフェース15を介して取得し、危険運転を検出したとき、そのように取得した現在位置の情報を、危険運転の検出時の車両の位置情報として出力するようになっている。このように、車両用ナビゲーション装置1への検出信号に含める位置情報が、元々車両用ナビゲーション装置1によって特定された現在位置情報である。このようになっていることで、車両用ナビゲーション装置1は、現在位置を特定するにしても、危険運転が発生した時点と、その時点における現在位置とを対応付けるための処理を行う必要がなくなるので、その分負荷が軽減される。また、ドライブレコーダ2も、自らが現在位置を特定するためのセンサを有する必要がなくなるので、構成が簡易になる。
【0065】
そこで、車両用ナビゲーション装置1は、特定した現在位置の情報を不揮発性記憶媒体としてのRAM21に記録し、ドライブレコーダ2は、現在位置の情報を取得するために、インターフェース15に要求信号を出力し、インターフェース15は、要求信号をドライブレコーダ2から受けたことに基づいて、車両用ナビゲーション装置1が記録した現在位置の情報をRAM21から読み出し、読み出した情報をドライブレコーダ2に出力するようになっている。
【0066】
このようになっていることで、ドライブレコーダ2が危険行為を検出したときに、車両用ナビゲーション装置1が特定した位置情報をドライブレコーダ2に渡す役割を、インターフェース15が担うので、危険運転の発生時に車両用ナビゲーション装置1が他の処理を行っていたとしても、ドライブレコーダ2は滞りなく位置情報を取得することができる。
【0067】
また、ドライブレコーダ2は、車両用ナビゲーション装置1が特定する現在位置の情報を、インターフェース15を介して繰り返し取得し、さらに、現在位置の情報の取得と同期して、危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力するようになっていてもよい。このように、現在位置の情報の取得と危険運転の判定とが同期しているので、危険運転の発生した位置の特定の精度が向上する。
【0068】
また、車両用ナビゲーション装置1が、現在位置に、過去に記録した位置情報の示す位置が、近いこと、および、位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告するようになっている。このようになっていることで、より警告の対象の地点を、より警告の必要性が高いものに絞り込むことができるようになる。
【0069】
また、車両用ナビゲーション装置1は、複数種類の処理をタイムシェアリング方式で実行し、さらに、取得した位置情報の記録を、他の処理の終了の後に実行するようになっていてもよい。このようになっていることで、位置情報の記録は、他の処理の妨げとなることがない。
【0070】
なお、上記の実施形態において、車両用ナビゲーション装置1のインターフェース15以外の部分が取得装置の一例に相当し、ドライブレコーダ2が検出装置の一例に相当し、インターフェース15がインターフェース装置の一例に相当する。
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0071】
例えば、ドライブレコーダ2の制御回路25は、プログラム300のステップ320で、危険地点データに、危険運転発生時の前後における撮影データを含めた上で、当該危険地点データを車両用ナビゲーション装置1に出力するようになっていてもよい。そして、車両用ナビゲーション装置1は、この撮影データを地図データ取得部18に記録し、さらに、自車両が、ある危険地点データが示す位置に近づいたときに、当該危険地点データに含まれる撮影データを、画像表示装置12に表示させるようになっていてもよい。このようになっていることで、過去に撮影された危険運転時の撮影画像をドライバーが再確認することができるので、ドライバーの危険運転に対する警戒意識を、より高めることができ、ひいては、ドライバーに安全運転を強く促すことができる。
【0072】
また、上記実施形態においては、車両用ナビゲーション装置1とドライブレコーダ2とは別々の筐体内に入っているが、必ずしもこのようになっている必要はない。例えば車両用ナビゲーション装置1とドライブレコーダ2の機能を併せ持つと共に第1の制御回路と第2の制御回路を有する装置が、1つの筐体の中に納められ、車両用ナビゲーション装置1の機能が第1の制御回路によって実現され、ドライブレコーダ2の機能が第2の機能によって実現されるようになっていてもよい。この場合、第2の制御回路が検出装置となり、第1の制御回路が取得装置となり、これら制御回路を繋ぐバス回路が、インターフェース装置となる。
【0073】
また、ドライブレコーダ2の制御回路25は、インターフェース15に位置要求信号を出力することで、車両用ナビゲーション装置1から現在位置を取得する処理を、危険運転を検出したときにのみ行うようになっていてもよい。
【0074】
また、ドライブレコーダ2は、車両用ナビゲーション装置1から現在位置情報を取得しないようになっていてもよい。例えば、ドライブレコーダ2は、位置検出器11に含まれるGPS受信機以外のGPS受信機を備え、そのGPS受信機からの信号に基づいて、自ら現在位置を特定するようになっていてもよい。このようになっている場合、インターフェース15は、ドライブレコーダ2からの信号を、単に制御回路19が認識できるように変換して制御回路19に出力し、制御回路19からの信号を、単に所定の方法で変換してドライブレコーダ2に出力するような回路であってもよい。
【0075】
また、ドライブレコーダ2は、現在位置情報を取得しないようになっていてもよい。この場合、ドライブレコーダ2は、危険運転があったときは、危険運転があった旨の通知信号をインターフェース15に出力するだけでよい。そして、インターフェース15は、受信した通知信号をRAM16に記録していてもよい。そして、車両用ナビゲーション装置1の制御回路19は、例えば繰り返し実行するAスケジュール処理において、現在位置を特定し、さらに通知信号がRAM16中に新たに記録されたことに基づいて、その最新の現在位置を危険運転時の車両位置として、RAM16に記録してもよい。このようになっていても、制御回路19における現在位置特定の処理の繰り返し周期を超えて、現在位置の検出と通知信号受信との時間差が広がることがない。
【0076】
また、車両用ナビゲーション装置1がドライブレコーダ2から受けた危険地点データを書き込む対象の記憶媒体は、地図データ取得部18のハードディスクである必要はない。例えば、車両用ナビゲーション装置1が地図データ取得部18以外の記憶媒体として、フラッシュメモリ、EEPROM、バックアップRAM等の、車両の主電源がオフとなっても記憶内容を保持し続ける記憶媒体を有していれば、その記憶媒体に、危険地点データを記録するようになっていてもよい。
【0077】
また、ドライブレコーダ2は、ハードディスクドライブ24中に、第1の加速度閾値および、第1の加速度閾値より高い第2の加速度閾値を記録しており、加速度センサ3が検出した加速度の大きさが第1の加速度閾値より高いときに、危険地点データを車両用ナビゲーション装置1に出力し、速度センサ3が検出した加速度の大きさが第2の加速度閾値より高いときに、撮影データをハードディスクドライブ24に保存するようになっていてもよい。
【0078】
また、車両用ナビゲーション装置1の制御回路19は、操作スイッチ群13から、警告基準回数、加速度閾値の、入力操作に基づく信号を、受け付けるようになっていてもよい。この場合、制御回路19は、入力された回数を、Cスケジュール処理中の警告基準回数に反映し、また、入力された加速度閾値を、インターフェース15を介してドライブレコーダ2に出力する。また、ドライブレコーダ2の制御回路25は、車両用ナビゲーション装置1から受けた加速度閾値を、プログラム300のステップ310の処理における加速度閾値とする。このようにすることで、ユーザは、車両用ナビゲーション装置1およびドライブレコーダ2の作動内容を、車両用ナビゲーション装置1を介して設定することができるようになる。
【0079】
また、ドライブレコーダ2が車両用ナビゲーション装置1に危険検出の判定のタイミング、すなわちD、Eスケジュール処理の実行タイミングを通知し、車両用ナビゲーション装置1は、その通知に基づいて、それら実行タイミングに同期して(例えば当該タイミングの直前に)現在位置情報をRAM16に記録するようになっていてもよい。
【0080】
また、検出装置は、ドライブレコーダである必要はない。安全基準を超える前記車両の危険運転を検出し、その検出したことを示す検出信号を出力するようになっていれば、どのような装置でもよい。
【0081】
また、取得装置は、車両用ナビゲーション装置である必要はない。取得装置は、インターフェース装置に接続され、車両の現在位置を繰り返し特定し、検出装置が出力した検出信号を、インターフェース装置を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの前記車両の位置情報を記録し、更に、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告するようになっていれば、どのような装置であってもよい。
【図面の簡単な説明】
【0082】
【図1】本発明の実施形態に係る警告システムの概略構成を示すブロック図である。
【図2】車両用ナビゲーション装置1のハードウェア構成を示すブロック図である。
【図3】ドライブレコーダ2のハードウェア構成を示すブロック図である。
【図4】警告システム内における処理の実行および信号のやりとりのタイミングを示す図である。
【図5】インターフェース15が実行するプログラム100のフローチャートである。
【図6】ドライブレコーダ2の制御回路25が実行するEスケジュール処理のためのプログラム200のフローチャートである。
【図7】車両用ナビゲーション装置1の制御回路19が実行するBスケジュール処理のためのプログラム300のフローチャートである。
【符号の説明】
【0083】
1…車両用ナビゲーション装置、2…ドライブレコーダ、3…加速度センサ、
4…各種センサ、5…監視カメラ、11…位置検出器、12…画像表示装置、
13…操作スイッチ群、14…スピーカ、15、23…インターフェース、
16、22…RAM、17、22…ROM、18…地図データ取得部、
19、25…制御回路、24…ハードディスクドライブ、
100〜300…プログラム、
405〜465…車両用ナビゲーション装置の制御回路の処理タイミング、
510〜560…ドライブレコーダの制御回路の処理タイミング、
800…危険運転発生タイミング、705〜765、810〜840…信号。
【技術分野】
【0001】
本発明は、車載用の警告システムに関する。
【背景技術】
【0002】
従来、運転者が危険行為を行った地点において再度同じような危険行為を行わないように警告する技術が、例えば特許文献1に記載されている。特許文献1においては、車両用ナビゲーション装置が、自車両の加速度等に基づいてドライバーの運転操作に危険行為があったか否かを判定し、危険行為があった場合、その危険行為の地点の情報を記録する。そして、自車両が当該地点に近づいたときに、警告を発する。
【0003】
特許文献1に記載のこの技術は、危険行為の検出、危険行為のあった地点の特定、当該地点の記録、自車両の当該地点への接近判定、および警告のための処理を、1つの制御回路によって実現している。
【特許文献1】特開2002−221428号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載のこの技術は、危険行為の検出、危険行為のあった地点の特定、当該地点の記録、自車両の当該地点への接近判定、および警告のための処理を、1つの制御回路によって実現しているので、その制御回路にかかる負荷が大きくなってしまうという問題がある。
【0005】
本発明は上記点に鑑み、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本発明の特徴は、車両に搭載される警告システムが、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力する検出装置と、(B)検出装置に接続されるインターフェース装置と、(C)インターフェース装置に接続され、自車両の現在位置を繰り返し特定し、検出装置が出力した検出信号を、インターフェース装置を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の危険位置情報を記録する取得装置と、を備え、取得装置は、特定した現在位置に、過去に記録した危険位置情報の示す位置が、近いことに基づいて、ユーザに警告することである。
【0007】
このように、検出装置と取得装置とがインターフェース装置を介して互いに接続され、検出装置が危険運転の検出の機能を担い、取得装置が、危険運転のあった位置を記録する機能および当該位置に自車両が近いときに警告する機能を担う。このようになっていることで、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することができるようになる。
【0008】
また、検出装置は、危険運転の検出時の自車両の位置情報を、検出信号として出力し、取得装置は、検出装置が出力した位置情報を、インターフェース装置を介して取得して危険位置情報として記録するようになっていてもよい。このように、危険運転の検出信号そのものに、危険運転のあった位置の情報が含まれることで、取得装置側の処理負担がより軽減される。
【0009】
また、検出装置は、取得装置が特定する現在位置の情報を、インターフェース装置を介して取得し、危険運転を検出したとき、そのように取得した現在位置の情報を、危険運転の検出時の車両の位置情報として出力するようになっていてもよい。このように、取得装置への検出信号に含める位置情報が、元々取得装置によって特定された現在位置情報となっている。このようになっていることで、取得装置は、現在位置を特定するにしても、危険運転が発生した時点と、その時点における現在位置とを対応付けるための処理を行う必要がなくなるので、その分負荷が軽減される。また、検出装置も、自らが現在位置を特定するためのセンサを有する必要がなくなるので、構成が簡易になる。
【0010】
ところで、危険行為のあった位置の記録を精度よく行うためには、危険行為の発生の検出タイミングと、自車両の現在位置の特定タイミングとが近い方が望ましい。上述のように、危険運転のあった位置の特定のための現在位置を取得装置が特定する場合、危険運転があってから取得装置が現在位置を特定するように構成することが考えられる。しかしながら、危険行為はいつ発生するかわからず、その発生時機を予測することが難しい。したがって、危険行為が発生したときに取得装置が他の処理を実行しており、そのために検出装置に取得させるための現在位置を特定する処理が遅れてしまう場合もあり得る。
【0011】
そこで、取得装置は、特定した現在位置の情報を記憶媒体に記録し、検出装置は、現在位置の情報を取得するために、インターフェース装置に要求信号を出力し、インターフェース装置は、要求信号を検出装置から受けたことに基づいて、取得装置が記録した現在位置の情報を記憶媒体から読み出し、読み出した情報を検出装置に出力するようになっていてもよい。
【0012】
このようになっていることで、検出装置が危険行為を検出したときに、取得装置が特定した位置情報を検出装置に渡す役割を、インターフェース装置が担うので、危険運転の発生時に取得装置が他の処理を行っていたとしても、検出装置は滞りなく位置情報を取得することができる。
【0013】
また、検出装置は、取得装置が特定する現在位置の情報を、インターフェース装置を介して繰り返し取得し、さらに、現在位置の情報の取得と同期して、危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力するようになっていてもよい。このように、現在位置の情報の取得と危険運転の判定とが同期しているので、危険運転の発生した位置の特定の精度が向上する。
【0014】
なお、ここでいう「取得と判定が同期する」とは、取得のタイミングと判定のタイミングが時間的にほぼ一致することのみならず、繰り返し行われる取得と判定において、取得タイミングと判定タイミングとが交互に訪れるようになっている場合、すなわち、取得と判定のタイミングが1対1に対応している場合も含む概念である。
【0015】
また、検出装置は、危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、記憶媒体に記録するようになっていてもよい。このような機能を有する検出装置は、ドライブレコーダともいう。
【0016】
また、検出装置は、危険運転の検出時において、自車両の周囲を撮影するカメラから受けた撮影画像を、位置情報と共に出力し、取得装置は、検出装置が出力した撮影画像を、インターフェース装置を介して取得して記録し、現在位置に、過去に記録した危険位置情報の示す位置が、近いことに基づいて、位置情報と共に取得した撮影画像を画像表示装置に表示させることで、ユーザに警告するようになっていてもよい。
【0017】
このようになっていることで、過去に撮影された危険運転時の撮影画像をドライバーが再確認することができるので、ドライバーに安全運転を強く促すことができる。
【0018】
また、取得装置が、現在位置に、過去に記録した危険位置情報の示す位置が、近いこと、および、危険位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告するようになっていてもよい。このようになっていることで、より警告の対象の地点を、より警告の必要性が高いものに絞り込むことができるようになる。なお、ここでいう「同じ位置」とは、完全に一致する位置のみならず、所定の許容誤差以内の近傍にあることも含む概念である。
【0019】
また、取得装置は、複数種類の処理をタイムシェアリング方式で実行し、さらに、危険位置情報の記録を、他の処理の終了の後に実行するようになっていてもよい。このようになっていることで、位置情報の記録は、他の処理の妨げとなることがない。
【0020】
また、取得装置は、設定された目的地までの経路を地図と共に画像表示装置に表示させるナビゲーション装置であってもよい。
【発明を実施するための最良の形態】
【0021】
以下、本発明の一実施形態について説明する。図1に、本実施形態に係る、警告システムの概略構成を、ブロック図で示す。この警告システムは、車両に搭載され、車両用ナビゲーション装置1、ドライブレコーダ2、加速度センサ(図中ではGセンサと記す)3、各種センサ4、および監視カメラ5を含む。
【0022】
車両用ナビゲーション装置1は、入力された目的地までの経路を案内する装置である。ドライブレコーダ2は、車両の危険な運転があったときに、その危険運転時における撮影画像等を記録する装置である。加速度センサ3は、自車両の前後、上下、および左右への加速度を定期的に(例えば10ミリ秒毎に)検出し、その都度検出した結果の信号をドライブレコーダ2に出力する装置である。各種センサ4は、ヨーレートセンサ、車速センサ等、車両の危険運転を検出するために補助的に用いられるセンサ群であり、ドライブレコーダ2に各種検出信号を出力する。監視カメラ5は、定期的に(例えば1秒または0.1秒毎に)車両の前方等の車両周囲を撮影し、その撮影結果の信号をドライブレコーダ2に出力する装置である。
【0023】
以下詳述する通り、車両用ナビゲーション装置1は、繰り返し定期的に自車位置を特定し、ドライブレコーダ2は、この自車位置の情報を繰り返し定期的に取得し、さらに、自車両の危険運転を検出したときに、取得した最新の自車位置情報を、危険地点データとして、車両用ナビゲーション装置1に出力する。そして車両用ナビゲーション装置1は、この危険地点データの示す位置に自車両が近づいたとき、ドライバーに対して警告を発する。
【0024】
図2に、車両用ナビゲーション装置1のハードウェア構成を、ブロック図で示す。車両用ナビゲーション装置1は、位置検出器11、画像表示装置12、操作スイッチ群13、スピーカ14、インターフェース15、RAM16、ROM17、地図データ取得部18、および制御回路19を有している。
【0025】
位置検出器11は、いずれも周知の図示しない地磁気センサ、ジャイロスコープ、車速センサ、およびGPS受信機等のセンサを有しており、これらセンサの各々の性質に基づいた、車両の現在位置や向きを特定するための情報を制御回路19に出力する。
【0026】
画像表示装置12は、制御回路19から出力された映像信号に基づいた映像をユーザに表示する。操作スイッチ群13は、メカニカルスイッチ、タッチパネル等の入力装置から成り、ユーザによるメカニカルスイッチ、タッチパネル等の操作に基づいた信号を制御回路19に出力する。
【0027】
インターフェース15は、制御回路19およびドライブレコーダ2に接続されることで、制御回路19とドライブレコーダ2との間の信号のやり取りを媒介する回路である。このインターフェース15は、RAM16に対して書き込みおよび読み出しの処理を実行することができるようになっている。具体的には、インターフェース15としては、CPU、RAM、ROM、I/Oを備えた周知のマイコンを用いることができる。
【0028】
地図データ取得部18は、ハードディスクドライブ等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出しおよび書き込みを行う装置から成り、制御回路19が実行するプログラム、経路案内用の地図データ等を記憶している。
【0029】
制御回路(コンピュータに相当する)19は、ROM17および地図データ取得部18から読み出した車両用ナビゲーション装置1の動作のためのプログラムを、タイムシェアリング方式で実行し、その実行の際にはRAM16、ROM17、および地図データ取得部18から情報を読み出し、RAM16および地図データ取得部18に対して情報の書き込みを行い、位置検出器11、画像表示装置12、操作スイッチ群13、および音声回路14と信号の授受を行う。
【0030】
制御回路19がプログラムを実行することによって行う具体的な処理としては、現在位置特定処理、誘導経路算出処理、経路案内処理等がある。
【0031】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。誘導経路算出処理は、操作スイッチ群13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出する処理である。経路案内処理は、地図データ取得部18から地図データを読み出し、算出された誘導経路、目的地、経由地および現在位置等をこの地図データの示す地図上に重ねた画像を、画像表示装置12に出力し、案内交差点の手前に自車両が到達したとき等の必要時に、右折、左折等を指示する案内音声信号をスピーカ14に出力する処理である。
【0032】
図3に、ドライブレコーダ2のハードウェア構成を、ブロック図で示す。ドライブレコーダ2は、RAM21、ROM22、インターフェース23、ハードディスクドライブ24、および制御回路25を有している。また、ドライブレコーダ2は、これら装置群21〜25をその内部に保護する筐体を有している。この筐体は、仮に車体が壊れる程の事故が発生しても、内部の装置群の破損を防ぐことができるよう、非常に堅牢な材質および構造を有している。
【0033】
ハードディスクドライブ24は、制御回路25が実行するためのプログラム、監視カメラ5が撮影した動画像のデータ、すなわち撮影データ等を記憶するための、記憶媒体である。
【0034】
インターフェース23は、制御回路25および車両用ナビゲーション装置1のインターフェース15に接続されることで、制御回路25と車両用ナビゲーション装置1との間の信号のやり取りを媒介する回路である。
【0035】
制御回路(コンピュータに相当する)25は、ROM22およびハードディスクドライブ24から読み出したドライブレコーダ2の動作のためのプログラムを実行し、その実行の際には、加速度センサ3、各種センサ4、および監視カメラ5から信号を受け、RAM21、ROM22、およびハードディスクドライブ24から情報を読み出し、RAM21およびハードディスクドライブ24に対して情報の書き込みを行う。
【0036】
次に、以上のようなハードウェア構成の警告システムの作動について説明する。図4に、警告システム内における処理および信号出力のタイミングの一例を示す。なお、図4において、記憶媒体は、地図データ取得部18のハードディスクに相当し、車両用ナビゲーション装置は、車両用ナビゲーション装置1の制御回路19に相当し、RAMは、車両用ナビゲーション装置1のRAM16に相当し、インターフェースは、車両用ナビゲーション装置1のインターフェース15に相当し、ドライブレコーダは、ドライブレコーダ2の制御回路25に相当する。
【0037】
図4に示す通り、車両用ナビゲーション装置1の制御回路19は、実行タイミングがあらかじめ定められたスケジュールに則っているAスケジュール処理、Bスケジュール処理、Cスケジュール処理等を実行する。より具体的には、制御回路19は、割り込み処理や他の優先的な処理を実行しないときは、Aスケジュール処理、Bスケジュール処理、Cスケジュール処理を、この順に、それぞれ定期的に、実行する。
【0038】
また、インターフェース15は、図5に示すプログラム100を常時繰り返し実行している。このプログラム100による処理の詳細については後述する。
【0039】
また、ドライブレコーダ2の制御回路25は、実行タイミングがあらかじめ定められたスケジュールに則っているDスケジュール処理、Eスケジュール処理を実行する。より具体的には、制御回路25は、Dスケジュール処理、Eスケジュール処理を、この順に、それぞれ定期的に(例えば、監視カメラ5の撮影周期と同じ周期で)、実行する。なお、Dスケジュール処理の終了からEスケジュール処理の開始までの時間間隔は、基準時間間隔(例えばスケジュール処理D、Eの実行周期の1/100等)であってもよい。
【0040】
タイミング405、420、435、450に実行されるAスケジュール処理において、制御回路19は、上述の現在位置特定処理を実行し、それによって特定した自車両の現在位置のデータを、RAM16の位置情報用の領域に格納する(信号705、725、745、765参照)。
【0041】
また、タイミング510、530、550に実行されるDスケジュール処理において、制御回路25は、まず、インターフェース23を用いて、位置要求信号をインターフェース15に出力し(信号710、730、750参照)、その応答としてインターフェース23を介してインターフェース15から位置データを受信するまで待つ。
【0042】
また、インターフェース15は、プログラム100の実行において、後述する危険地点データを受信するか(ステップ110参照)、または、上述の位置要求信号を受信するまで(ステップ120参照)待つ。そして、位置要求信号を受信すると、続いて、RAM16の位置情報用の領域に格納されている最新の現在位置データを読み出す(ステップ140、信号715、735、755参照)。そして更に、読み出したデータを、位置データとして、ドライブレコーダ2に出力する(信号720、740、760参照)。
【0043】
そして、ドライブレコーダ2の制御回路25は、上述のDスケジュール処理において、位置データを受信すると、その位置データをRAM21または制御回路25内のレジスタに記録し、Dスケジュール処理を終了する。
【0044】
制御回路25は、Dスケジュール処理を終了すると、続けてEスケジュール処理を開始する。制御回路25は、このEスケジュール処理のために、図6に示すプログラム200を実行し、その実行において、危険運転が発生したと判定すると(ステップ210参照)、続いて位置データを含む危険地点データをインターフェース15に出力し(ステップ220参照)、さらに続いて撮影データをハードディスクドライブ24に記録し(ステップ230参照)、その後Eスケジュール処理を終了する。また、危険運転が発生していないと判定すると(ステップ210参照)その後すぐにEスケジュール処理を終了する。
【0045】
ここで、危険運転が発生したか否かの判定は、主に加速度センサ3からの信号に基づいて行う。具体的には、ハードディスクドライブ24中に記録されている加速度閾値の値と、加速度センサ3から出力された最新の信号に対応する加速度の大きさの値とを比較し、後者の方が大きい場合は危険運転が発生したと判定し、それ以外の場合は危険運転が発生していないと判定する。
【0046】
また、危険地点データに含める位置データは、直前のDスケジュール処理によってRAM21に記録されたものを用いる。
【0047】
また、ここでハードディスクドライブ24に記録する撮影データは、危険運転が発生したと判定した時点の前後の期間における撮影データである。このために、制御回路25は、過去所定時間内に監視カメラ5から取得した撮影データを、RAM21に保持するようになっている。
【0048】
ここで、図4に示すように、タイミング800およびその後の期間(例えば1秒間)において危険運転があった場合を考える。この場合、タイミング540におけるEスケジュール処理において、制御回路25は、危険運転の発生を検出し、タイミング530で取得した位置情報を含む危険地点データをインターフェース15に出力する(信号810参照)。
【0049】
またインターフェース15は、プログラム100の実行において、危険地点データを受信したと判定すると(ステップ110参照)、続いて、受信した危険地点データをRAM21の危険地点データ用の領域に記録する(ステップ130、信号820参照)。
【0050】
また、制御回路19は、タイミング410、425、440、465に実行されるBスケジュール処理のために、図7に示すプログラム300を実行する。そして、このプログラム300の実行において、まず、ドライブレコーダ2からの受信データを参照するため、RAM21の危険地点データ用の領域の内容を読み出す(ステップ310参照)。そして、その読み出した内容が、前回の内容と異なっているか否か(すなわち新しいか否か)によって、新たな危険地点データがあるか否かを判定する(ステップ320参照)。新たな危険地点がない場合は、その後Bスケジュール処理を終了する。
【0051】
図4のタイミング440においては、ステップ310で危険地点データ用の領域を読み出し(信号830参照)、その内容に基づいて、新たな危険地点データがあると判定し、その判定に基づいて、続いて、当該危険地点データ中の位置データ(以下、新規位置データという)と、地図データ取得部18のハードディスク中のすべての警告地点データ中の位置データ(以下、過去位置データという)とを比較し、新規位置データと同じ位置を示す過去位置データがあるか否かを判定する(ステップ330参照)。
【0052】
ここで、同じ位置であるか否かは、比較対象の2つの位置の間の距離間隔が、基準距離間隔(例えば10メートル)以内であるか否かに基づいて判定する。
【0053】
そして、新規位置データと同じ位置を示す過去位置データがない場合、当該新規位置データと、1回を示す回数データとを含む新たな警告地点データ(危険位置情報の一例に相当する)を、地図データ取得部18のハードディスクに記録し(ステップ340、信号840参照)、その後Bスケジュール処理を終了する。
【0054】
また、新規位置データと同じ位置を示す過去位置データがある場合、当該過去位置データと共に警告地点データに含まれる回数データの値を、1回分だけ増加させ(ステップ350、信号840参照)、その後Bスケジュール処理を終了する。
【0055】
以上のように、車両用ナビゲーション装置1は、繰り返し現在位置を特定して位置データとしてRAM21に記録し、ドライブレコーダ2はRAM21に記録された最新の位置データをインターフェース15を介して繰り返し取得する。そして、最新の位置データを取得した直後に、危険運転の有無を判定し、危険運転があれば、当該最新の位置データを危険地点データに含めて車両用ナビゲーション装置1に出力する。そして、車両用ナビゲーション装置1は、受信した危険地点データ中の位置を、その位置毎の受信回数と共に、警告データとして、長期保存可能な記憶媒体としてのハードディスクに記録する。
【0056】
また、制御回路19は、タイミング415、430、445、460に実行されるCスケジュール処理において、Aスケジュール処理によってRAM21に記録された最新の現在位置に基づいて、自車両が危険運転の恐れのある位置に近づいているか否かを判定し、近づいているときは、続いて、画像表示装置12およびスピーカ14に、安全運転を促す警告のための画像および音声を、それぞれ出力させる。また、自車両が危険運転のあった位置に近づいていないときは、その後Cスケジュール処理を終了する。
【0057】
ここで、危険運転の恐れのある位置とは、地図データ取得部18のハードディスク中の警告地点データのうち、回数データが警告基準回数以上となっているものが示す位置である。このような警告によって、ユーザの安全運転の意識が高まり、危険な運転の発生を未然に防ぐことができる。
【0058】
なお、Bスケジュール処理の実行タイミング460およびCスケジュール処理の実行タイミング465は、スケジュールされた実行タイミングより遅れている。これは、タイミング455に、Bスケジュール処理より優先度が高いX処理(例えばユーザの入力受け付け処理、等)を制御回路19が実行していることに起因するものである。この場合、当該他の処理、および、Cスケジュール処理等が終了して、制御回路19がアイドル状態となったときに、Bスケジュール処理の実行が始まる。
【0059】
Bスケジュール処理によって追加または更新される警告データの位置に再度自車両が到達するまでには、図4に示したような処理の実行間隔に比べて遥かに大きい時間が経過することが通常である。その意味では、Bスケジュール処理を、他の処理に優先させて行う必要性は低い。
【0060】
他方、危険運転の発生した地点を精度良く特定するには、危険運転の発生タイミングと、現在位置特定のタイミングとが近接していることがより好ましい。その意味では、車両用ナビゲーション装置1におけるスケジュール処理Aの優先度は、他の処理よりも高くなっていてもよい。また、加速度センサ3におけるスケジュール処理Dの実行タイミングと、スケジュール処理Eの実行タイミングとは、同期していてもよく、かつ、非常に近接していてもよい。
【0061】
以上説明した通り、本実施形態の警告システムは、(A)安全基準を超える自車両の危険運転を検出し、その検出したことを示す検出信号を出力するドライブレコーダ2と、(B)ドライブレコーダ2に接続されるインターフェース15と、(C)インターフェース15に接続され、自車両の現在位置を繰り返し特定し、ドライブレコーダ2が出力した検出信号を、インターフェース15を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの車両の位置情報を記録する車両用ナビゲーション装置1と、を備え、車両用ナビゲーション装置1は、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告する。
【0062】
このように、ドライブレコーダ2と車両用ナビゲーション装置1とがインターフェース15を介して互いに接続され、ドライブレコーダ2が危険運転の検出の機能を担い、車両用ナビゲーション装置1が、危険運転のあった位置を記録する機能および当該位置に自車両が近いときに警告する機能を担う。このようになっていることで、ドライバーの危険行為を検出してその検出位置を記録し、自車両がその検出位置に近づいたときに警告を発する技術において、検出位置の記録および警告を行うための装置に対する負荷を軽減することができるようになる。そして、元々ドライブレコーダ2が有している危険運転の検知の機能を利用することで、車両用ナビゲーション装置1の処理の負荷が軽減される。
【0063】
また、ドライブレコーダ2は、危険運転の検出時の自車両の位置情報を、検出信号として出力し、車両用ナビゲーション装置1は、ドライブレコーダ2が出力した位置情報を、インターフェース15を介して取得して記録するようになっている。このように、危険運転の検出信号そのものに、危険運転のあった位置の情報が含まれることで、車両用ナビゲーション装置1側の負担がより軽減される。
【0064】
また、ドライブレコーダ2は、車両用ナビゲーション装置1が特定する現在位置の情報を、インターフェース15を介して取得し、危険運転を検出したとき、そのように取得した現在位置の情報を、危険運転の検出時の車両の位置情報として出力するようになっている。このように、車両用ナビゲーション装置1への検出信号に含める位置情報が、元々車両用ナビゲーション装置1によって特定された現在位置情報である。このようになっていることで、車両用ナビゲーション装置1は、現在位置を特定するにしても、危険運転が発生した時点と、その時点における現在位置とを対応付けるための処理を行う必要がなくなるので、その分負荷が軽減される。また、ドライブレコーダ2も、自らが現在位置を特定するためのセンサを有する必要がなくなるので、構成が簡易になる。
【0065】
そこで、車両用ナビゲーション装置1は、特定した現在位置の情報を不揮発性記憶媒体としてのRAM21に記録し、ドライブレコーダ2は、現在位置の情報を取得するために、インターフェース15に要求信号を出力し、インターフェース15は、要求信号をドライブレコーダ2から受けたことに基づいて、車両用ナビゲーション装置1が記録した現在位置の情報をRAM21から読み出し、読み出した情報をドライブレコーダ2に出力するようになっている。
【0066】
このようになっていることで、ドライブレコーダ2が危険行為を検出したときに、車両用ナビゲーション装置1が特定した位置情報をドライブレコーダ2に渡す役割を、インターフェース15が担うので、危険運転の発生時に車両用ナビゲーション装置1が他の処理を行っていたとしても、ドライブレコーダ2は滞りなく位置情報を取得することができる。
【0067】
また、ドライブレコーダ2は、車両用ナビゲーション装置1が特定する現在位置の情報を、インターフェース15を介して繰り返し取得し、さらに、現在位置の情報の取得と同期して、危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力するようになっていてもよい。このように、現在位置の情報の取得と危険運転の判定とが同期しているので、危険運転の発生した位置の特定の精度が向上する。
【0068】
また、車両用ナビゲーション装置1が、現在位置に、過去に記録した位置情報の示す位置が、近いこと、および、位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告するようになっている。このようになっていることで、より警告の対象の地点を、より警告の必要性が高いものに絞り込むことができるようになる。
【0069】
また、車両用ナビゲーション装置1は、複数種類の処理をタイムシェアリング方式で実行し、さらに、取得した位置情報の記録を、他の処理の終了の後に実行するようになっていてもよい。このようになっていることで、位置情報の記録は、他の処理の妨げとなることがない。
【0070】
なお、上記の実施形態において、車両用ナビゲーション装置1のインターフェース15以外の部分が取得装置の一例に相当し、ドライブレコーダ2が検出装置の一例に相当し、インターフェース15がインターフェース装置の一例に相当する。
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0071】
例えば、ドライブレコーダ2の制御回路25は、プログラム300のステップ320で、危険地点データに、危険運転発生時の前後における撮影データを含めた上で、当該危険地点データを車両用ナビゲーション装置1に出力するようになっていてもよい。そして、車両用ナビゲーション装置1は、この撮影データを地図データ取得部18に記録し、さらに、自車両が、ある危険地点データが示す位置に近づいたときに、当該危険地点データに含まれる撮影データを、画像表示装置12に表示させるようになっていてもよい。このようになっていることで、過去に撮影された危険運転時の撮影画像をドライバーが再確認することができるので、ドライバーの危険運転に対する警戒意識を、より高めることができ、ひいては、ドライバーに安全運転を強く促すことができる。
【0072】
また、上記実施形態においては、車両用ナビゲーション装置1とドライブレコーダ2とは別々の筐体内に入っているが、必ずしもこのようになっている必要はない。例えば車両用ナビゲーション装置1とドライブレコーダ2の機能を併せ持つと共に第1の制御回路と第2の制御回路を有する装置が、1つの筐体の中に納められ、車両用ナビゲーション装置1の機能が第1の制御回路によって実現され、ドライブレコーダ2の機能が第2の機能によって実現されるようになっていてもよい。この場合、第2の制御回路が検出装置となり、第1の制御回路が取得装置となり、これら制御回路を繋ぐバス回路が、インターフェース装置となる。
【0073】
また、ドライブレコーダ2の制御回路25は、インターフェース15に位置要求信号を出力することで、車両用ナビゲーション装置1から現在位置を取得する処理を、危険運転を検出したときにのみ行うようになっていてもよい。
【0074】
また、ドライブレコーダ2は、車両用ナビゲーション装置1から現在位置情報を取得しないようになっていてもよい。例えば、ドライブレコーダ2は、位置検出器11に含まれるGPS受信機以外のGPS受信機を備え、そのGPS受信機からの信号に基づいて、自ら現在位置を特定するようになっていてもよい。このようになっている場合、インターフェース15は、ドライブレコーダ2からの信号を、単に制御回路19が認識できるように変換して制御回路19に出力し、制御回路19からの信号を、単に所定の方法で変換してドライブレコーダ2に出力するような回路であってもよい。
【0075】
また、ドライブレコーダ2は、現在位置情報を取得しないようになっていてもよい。この場合、ドライブレコーダ2は、危険運転があったときは、危険運転があった旨の通知信号をインターフェース15に出力するだけでよい。そして、インターフェース15は、受信した通知信号をRAM16に記録していてもよい。そして、車両用ナビゲーション装置1の制御回路19は、例えば繰り返し実行するAスケジュール処理において、現在位置を特定し、さらに通知信号がRAM16中に新たに記録されたことに基づいて、その最新の現在位置を危険運転時の車両位置として、RAM16に記録してもよい。このようになっていても、制御回路19における現在位置特定の処理の繰り返し周期を超えて、現在位置の検出と通知信号受信との時間差が広がることがない。
【0076】
また、車両用ナビゲーション装置1がドライブレコーダ2から受けた危険地点データを書き込む対象の記憶媒体は、地図データ取得部18のハードディスクである必要はない。例えば、車両用ナビゲーション装置1が地図データ取得部18以外の記憶媒体として、フラッシュメモリ、EEPROM、バックアップRAM等の、車両の主電源がオフとなっても記憶内容を保持し続ける記憶媒体を有していれば、その記憶媒体に、危険地点データを記録するようになっていてもよい。
【0077】
また、ドライブレコーダ2は、ハードディスクドライブ24中に、第1の加速度閾値および、第1の加速度閾値より高い第2の加速度閾値を記録しており、加速度センサ3が検出した加速度の大きさが第1の加速度閾値より高いときに、危険地点データを車両用ナビゲーション装置1に出力し、速度センサ3が検出した加速度の大きさが第2の加速度閾値より高いときに、撮影データをハードディスクドライブ24に保存するようになっていてもよい。
【0078】
また、車両用ナビゲーション装置1の制御回路19は、操作スイッチ群13から、警告基準回数、加速度閾値の、入力操作に基づく信号を、受け付けるようになっていてもよい。この場合、制御回路19は、入力された回数を、Cスケジュール処理中の警告基準回数に反映し、また、入力された加速度閾値を、インターフェース15を介してドライブレコーダ2に出力する。また、ドライブレコーダ2の制御回路25は、車両用ナビゲーション装置1から受けた加速度閾値を、プログラム300のステップ310の処理における加速度閾値とする。このようにすることで、ユーザは、車両用ナビゲーション装置1およびドライブレコーダ2の作動内容を、車両用ナビゲーション装置1を介して設定することができるようになる。
【0079】
また、ドライブレコーダ2が車両用ナビゲーション装置1に危険検出の判定のタイミング、すなわちD、Eスケジュール処理の実行タイミングを通知し、車両用ナビゲーション装置1は、その通知に基づいて、それら実行タイミングに同期して(例えば当該タイミングの直前に)現在位置情報をRAM16に記録するようになっていてもよい。
【0080】
また、検出装置は、ドライブレコーダである必要はない。安全基準を超える前記車両の危険運転を検出し、その検出したことを示す検出信号を出力するようになっていれば、どのような装置でもよい。
【0081】
また、取得装置は、車両用ナビゲーション装置である必要はない。取得装置は、インターフェース装置に接続され、車両の現在位置を繰り返し特定し、検出装置が出力した検出信号を、インターフェース装置を介して取得し、検出信号を取得することに基づいて、危険運転のあったときの前記車両の位置情報を記録し、更に、特定した現在位置に、過去に記録した位置情報の示す位置が、近いことに基づいて、ユーザに警告するようになっていれば、どのような装置であってもよい。
【図面の簡単な説明】
【0082】
【図1】本発明の実施形態に係る警告システムの概略構成を示すブロック図である。
【図2】車両用ナビゲーション装置1のハードウェア構成を示すブロック図である。
【図3】ドライブレコーダ2のハードウェア構成を示すブロック図である。
【図4】警告システム内における処理の実行および信号のやりとりのタイミングを示す図である。
【図5】インターフェース15が実行するプログラム100のフローチャートである。
【図6】ドライブレコーダ2の制御回路25が実行するEスケジュール処理のためのプログラム200のフローチャートである。
【図7】車両用ナビゲーション装置1の制御回路19が実行するBスケジュール処理のためのプログラム300のフローチャートである。
【符号の説明】
【0083】
1…車両用ナビゲーション装置、2…ドライブレコーダ、3…加速度センサ、
4…各種センサ、5…監視カメラ、11…位置検出器、12…画像表示装置、
13…操作スイッチ群、14…スピーカ、15、23…インターフェース、
16、22…RAM、17、22…ROM、18…地図データ取得部、
19、25…制御回路、24…ハードディスクドライブ、
100〜300…プログラム、
405〜465…車両用ナビゲーション装置の制御回路の処理タイミング、
510〜560…ドライブレコーダの制御回路の処理タイミング、
800…危険運転発生タイミング、705〜765、810〜840…信号。
【特許請求の範囲】
【請求項1】
車両に搭載される警告システムであって、
安全基準を超える前記車両の危険運転を検出し、その検出したことを示す検出信号を出力する検出装置と、
前記検出装置に接続されるインターフェース装置と、
前記インターフェース装置に接続され、前記車両の現在位置を繰り返し特定し、前記検出装置が出力した前記検出信号を、前記インターフェース装置を介して取得し、前記検出信号を取得することに基づいて、前記危険運転のあったときの前記車両の位置情報(以下、危険位置情報という)を記録する取得装置と、を備え、
前記取得装置は、特定した現在位置に、過去に記録した前記危険位置情報の示す位置が、近いことに基づいて、ユーザに警告することを特徴とする警告システム。
【請求項2】
前記検出装置は、前記危険運転の検出時の前記車両の位置情報を、前記検出信号として出力し、
前記取得装置は、前記検出装置が出力した前記位置情報を、前記危険位置情報として前記インターフェース装置を介して取得して記録することを特徴とする請求項1に記載の警告システム。
【請求項3】
前記検出装置は、前記取得装置が特定する現在位置の情報を、前記インターフェース装置を介して取得し、前記危険運転を検出したとき、取得した前記現在位置の情報を、前記危険運転の検出時の前記車両の位置情報として出力することを特徴とする請求項2に記載の警告システム。
【請求項4】
前記取得装置は、特定した前記現在位置の情報を記憶媒体に記録し、
前記検出装置は、前記現在位置の情報を取得するために、前記インターフェース装置に要求信号を出力し、
前記インターフェース装置は、前記要求信号を前記検出装置から受けたことに基づいて、前記取得装置が記録した前記現在位置の情報を前記記憶媒体から読み出し、読み出した前記情報を前記検出装置に出力することを特徴とする請求項3に記載の警告システム。
【請求項5】
前記検出装置は、前記取得装置が特定する現在位置の情報を、前記インターフェース装置を介して繰り返し取得し、さらに、前記現在位置の情報の取得と同期して、前記危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力することを特徴とする請求項3または4に記載の警告システム。
【請求項6】
前記検出装置は、前記危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、記憶媒体に記録することを特徴とする請求項1ないし5のいずれか1つに記載の警告システム。
【請求項7】
前記検出装置は、前記危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、前記危険位置情報と共に出力し、
前記取得装置は、検出装置が出力した前記撮影画像を、前記インターフェース装置を介して取得して記録し、前記現在位置に、過去に記録した前記位置情報の示す位置が、近いことに基づいて、前記位置情報と共に取得した前記撮影画像を画像表示装置に表示させることで、ユーザに警告することを特徴とする請求項1ないし6のいずれか1つに記載の警告システム。
【請求項8】
前記取得装置が、前記現在位置に、過去に記録した前記危険位置情報の示す位置が、近いこと、および、前記危険位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告することを特徴とする請求項1ないし7のいずれか1つに記載の警告システム。
【請求項9】
前記取得装置は、複数種類の処理をタイムシェアリング方式で実行し、さらに、前記危険位置情報の記録を、他の処理の終了の後に実行することを特徴とする請求項1ないし8のいずれか1つに記載の警告システム。
【請求項10】
前記取得装置は、設定された目的地までの経路を地図と共に画像表示装置に表示させるナビゲーション装置であることを特徴とする請求項1ないし8のいずれか1つに記載の警告システム。
【請求項1】
車両に搭載される警告システムであって、
安全基準を超える前記車両の危険運転を検出し、その検出したことを示す検出信号を出力する検出装置と、
前記検出装置に接続されるインターフェース装置と、
前記インターフェース装置に接続され、前記車両の現在位置を繰り返し特定し、前記検出装置が出力した前記検出信号を、前記インターフェース装置を介して取得し、前記検出信号を取得することに基づいて、前記危険運転のあったときの前記車両の位置情報(以下、危険位置情報という)を記録する取得装置と、を備え、
前記取得装置は、特定した現在位置に、過去に記録した前記危険位置情報の示す位置が、近いことに基づいて、ユーザに警告することを特徴とする警告システム。
【請求項2】
前記検出装置は、前記危険運転の検出時の前記車両の位置情報を、前記検出信号として出力し、
前記取得装置は、前記検出装置が出力した前記位置情報を、前記危険位置情報として前記インターフェース装置を介して取得して記録することを特徴とする請求項1に記載の警告システム。
【請求項3】
前記検出装置は、前記取得装置が特定する現在位置の情報を、前記インターフェース装置を介して取得し、前記危険運転を検出したとき、取得した前記現在位置の情報を、前記危険運転の検出時の前記車両の位置情報として出力することを特徴とする請求項2に記載の警告システム。
【請求項4】
前記取得装置は、特定した前記現在位置の情報を記憶媒体に記録し、
前記検出装置は、前記現在位置の情報を取得するために、前記インターフェース装置に要求信号を出力し、
前記インターフェース装置は、前記要求信号を前記検出装置から受けたことに基づいて、前記取得装置が記録した前記現在位置の情報を前記記憶媒体から読み出し、読み出した前記情報を前記検出装置に出力することを特徴とする請求項3に記載の警告システム。
【請求項5】
前記検出装置は、前記取得装置が特定する現在位置の情報を、前記インターフェース装置を介して繰り返し取得し、さらに、前記現在位置の情報の取得と同期して、前記危険運転があったか否かを繰り返し判定し、それぞれの判定の結果が肯定的であるときに、当該判定と同期して取得した前記現在位置の情報を、前記位置情報として出力することを特徴とする請求項3または4に記載の警告システム。
【請求項6】
前記検出装置は、前記危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、記憶媒体に記録することを特徴とする請求項1ないし5のいずれか1つに記載の警告システム。
【請求項7】
前記検出装置は、前記危険運転の検出時において、前記車両の周囲を撮影するカメラから受けた撮影画像を、前記危険位置情報と共に出力し、
前記取得装置は、検出装置が出力した前記撮影画像を、前記インターフェース装置を介して取得して記録し、前記現在位置に、過去に記録した前記位置情報の示す位置が、近いことに基づいて、前記位置情報と共に取得した前記撮影画像を画像表示装置に表示させることで、ユーザに警告することを特徴とする請求項1ないし6のいずれか1つに記載の警告システム。
【請求項8】
前記取得装置が、前記現在位置に、過去に記録した前記危険位置情報の示す位置が、近いこと、および、前記危険位置情報と同じ位置を示す位置情報を基準回数以上取得して記録していること、に基づいて、ユーザに警告することを特徴とする請求項1ないし7のいずれか1つに記載の警告システム。
【請求項9】
前記取得装置は、複数種類の処理をタイムシェアリング方式で実行し、さらに、前記危険位置情報の記録を、他の処理の終了の後に実行することを特徴とする請求項1ないし8のいずれか1つに記載の警告システム。
【請求項10】
前記取得装置は、設定された目的地までの経路を地図と共に画像表示装置に表示させるナビゲーション装置であることを特徴とする請求項1ないし8のいずれか1つに記載の警告システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−51642(P2008−51642A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−227974(P2006−227974)
【出願日】平成18年8月24日(2006.8.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月24日(2006.8.24)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]