
車載用カメラ
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、車載用カメラに関する。
【背景技術】
【0002】
自動車などの車両の運転を支援するための技術の一つとして、車両から対象物までの距離を求める技術がある。この種の距離計測技術としては、2台のカメラを車両に設けてステレオカメラとし、このステレオカメラの撮影画像にもとづいて三角測量法を行う技術が知られている。ステレオカメラを用いた三角測量法によれば、対象物までの距離が測定できるとともに、対象物の3次元空間的な位置を推定することも可能である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−146217号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
三角測量法における測定距離の誤差は、2台のカメラ中心を結ぶ線と、一方のカメラの中心と対象物とを結ぶ線と、のなす角をθとしたとき、sinθの2乗に反比例する。このため、2台のカメラを路面に平行な方向に沿って設置する場合、路面平行方向の視野角が広角になると、θが0度または180度に近づき測定距離の誤差が大きくなってしまう。
【0005】
そこで、路面平行方向の視野角が広角になっても測定距離の誤差を小さく保つ方法として、2台のカメラを路面に垂直な方向に並べて車両に設置する方法が考えられる。
【0006】
しかし、2台のカメラを路面に垂直な方向に並べて設置する場合であっても、カメラがXYアドレス読み出し法(以下、ローリングシャッタ法という)により駆動されるとともにカメラのライン方向が路面に平行であるときは、ローリングシャッタ法に起因するライン間のサンプリング時刻の違いにより測定距離に誤差が生じてしまう。
【0007】
このローリングシャッタ法に起因する測定距離の誤差は、撮影画像内で対象物画像が静止している場合には大きな問題とはならない。ところが、車載用カメラは車両の移動とともにカメラ自体が移動するため、車載用カメラによる撮影画像内の対象物画像は動いている場合が多い。このため、2台のカメラを路面に垂直に並べて設置する場合であっても、カメラがローリングシャッタ法により駆動されるとともにカメラのライン方向が路面に平行であるときは、ローリングシャッタ法に起因する測定距離の誤差の影響を無視することができない。
【課題を解決するための手段】
【0008】
本発明の一実施形態に係る車載用カメラは、上述した課題を解決するために、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
【図面の簡単な説明】
【0009】
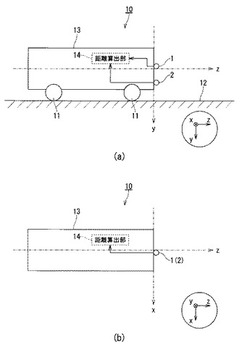
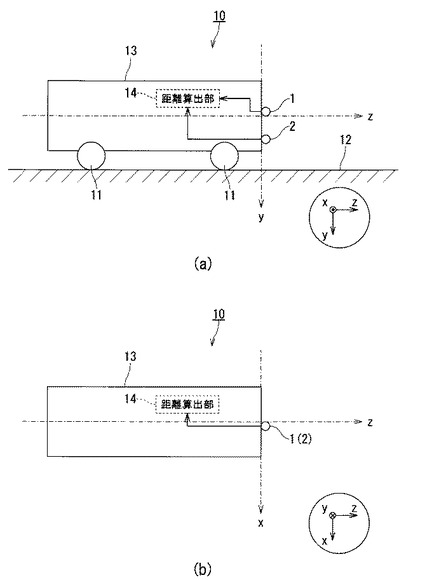
【図1】本発明の一実施形態に係る2台の車載用カメラが設けられた車両の一例を示す概略的な構成図であり、(a)は車両の横側面図、(b)は車両の平面図。
【図2】車載用カメラのイメージセンサの動作について説明するための図。
【図3】本実施形態に係る2台の車載用カメラのX方向と取り付け位置との関係を示す説明図。
【図4】ステレオカメラを用いた三角測量法の原理を説明するための図。
【図5】ローリングシャッタ法で駆動される2台のカメラがy方向(路面法線方向)に沿って配置されるとともに各カメラのX方向(行方向)がx方向に平行である場合において生じる、ローリングシャッタ法に起因する測定距離の誤差を説明するための図。
【図6】エピポーラ面とエピポーラ線について説明するための図。
【図7】2台の車載用カメラが設けられた車両の変形例を示す概略的な構成図であり、(a)は車両の横側面図、(b)は車両の平面図。
【発明を実施するための形態】
【0010】
本発明に係る車載用カメラの実施の形態について、添付図面を参照して説明する。
【0011】
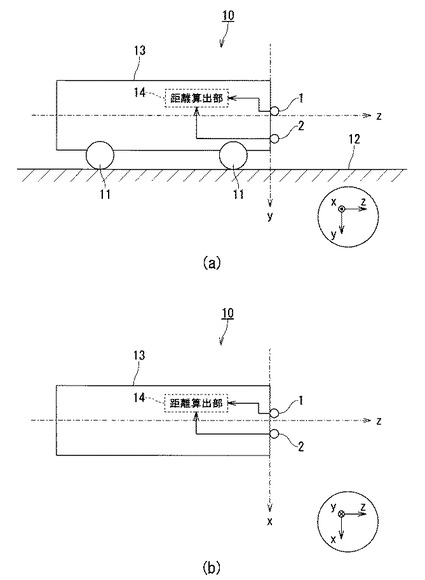
図1は、本発明の一実施形態に係る2台の車載用カメラ1および2が設けられた車両10の一例を示す概略的な構成図である。図1(a)は車両10の横側面図、(b)は車両10の平面図をそれぞれ示す。なお、以下の説明では、図1に示すように、タイヤ11が接地する路面12に対して平行な車体13の単軸方向をx方向、路面12の法線方向をy方向、車体13の長軸方向をz方向とする。
【0012】
図1(a)および(b)に示すように、車体13の一側面には、2台の車載用カメラ1および2がy方向に沿って上下に配置される。以下の説明では、上側(路面12から遠い側)に車載用カメラ1が配置され、下側(路面12に近い側)に車載用カメラ2が配置されるものとする。
【0013】
車載用カメラ1および2はそれぞれ、行列に配置された撮像素子を有しローリングシャッタ法(XYアドレス読み出し法)により画像信号を出力するCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどにより構成される。
【0014】
距離算出部14は、車載用カメラ1および2からそれぞれの撮影画像を取得し、これらの撮影画像にもとづいて撮影画像に含まれる対象点までの距離を三角測量法により算出する。この距離算出部14は、たとえばCPU、RAM、ROMを備えたマイクロコントローラにより構成することができる。車載用カメラ1および2と距離算出部14により、車両10から対象点までの距離を算出することができる。
【0015】
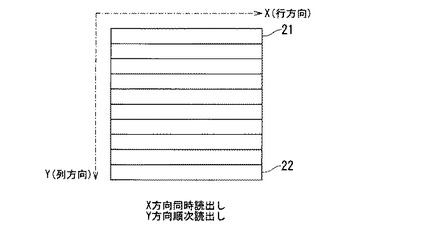
図2は、車載用カメラ1のイメージセンサの動作について説明するための図である。なお、以下の説明では、イメージセンサを構成する撮像素子の行方向をX方向、列方向をY方向とする場合の例について示す。車載用カメラ2は、車載用カメラ1と同一の構成および作用を有するため、説明を省略する。
【0016】
ローリングシャッタ法(XYアドレス読み出し法)では、1枚のフレーム画像を作成する際に、先頭行21から画素行ごとに順次シャッタ動作を行って画像信号を取り出し、フレーム周期以内に最終行22までの読み出し動作を完了するようになっている。このため、同一行の(X方向に並んだ)撮像素子間ではサンプリング時刻(露光時刻、観測時刻)が等しいが、先頭行21から最終行22に向かって行ごとにサンプリング時刻が所定のずれ時間ずつ遅れる。このため、先頭行21の露光時刻に比べ、最終行22に近づくほど露光時刻が遅れていく。たとえば、フィールド周波数が60Hzの場合、読出し開始から完了するまでに約1/60秒かかる。この場合、先頭行21と最終行22との露光時刻の差は約1/60秒となる。
【0017】
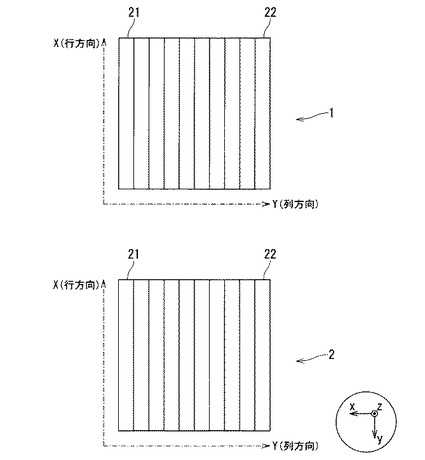
図3は、本実施形態に係る2台の車載用カメラ1および2のX方向と取り付け位置との関係を示す説明図である。
【0018】
図3に示すように、本実施形態に係る車載用カメラ1および2は、y方向(路面の法線方向)に沿って上下に配置される。これは、2台のカメラをx方向(路面平行方向)に沿って左右に配置する場合における、x方向が広角になるに従い測定距離の誤差が増大する問題を未然に防ぐためである。また、図3に示すように、本実施形態に係る車載用カメラ1および2は、車載用カメラ1および2の中心を結ぶカメラ間中心線とそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように配置される。これは、たとえ2台のカメラをy方向(路面法線方向)に沿って配置しても、各カメラのX方向(行方向)がx方向(路面平行方向)に平行であると、ローリングシャッタ法に起因する測定距離の誤差が生じてしまうためである。
【0019】
まず、2台のカメラをx方向に沿って左右に配置する場合における、x方向が広角になるに従い測定距離の誤差が増大する問題について説明する。
【0020】
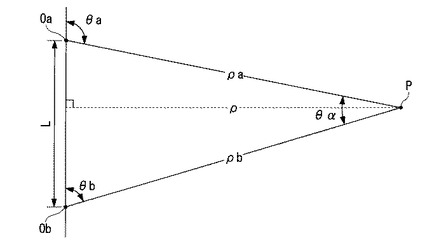
図4は、ステレオカメラを用いた三角測量法の原理を説明するための図である。
【0021】
ステレオカメラの一方のカメラの中心をOa、他方のカメラの中心をOb、撮影対象点をPとし、カメラ中心間距離(基線長)をLとする。また、直線OaOb(カメラ間中心線)と直線POaのなす角をθa、直線OaObと直線PObのなす角をθb、直線POaと直線PObのなす角をθαとする。また、線分POaの長さをρa、線分PObの長さをρb、直線OaObと対象点Pとの距離をρとする。このとき、正弦定理から次の式(1)が得られる。
ρa/sinθb = L/sinθα
= L/sin(θa−θb) (∵θα=θa−θb) (1)
【0022】
また、直線OaObと対象点Pとの距離ρは次式(2)のように書ける。
ρ = ρa・sin(π−θa) = ρa・sinθa (2)
【0023】
よって、式(1)および(2)から次の式(3)を得ることができる。
ρ = L・sinθa・sinθb / sin(θa−θb) (3)
【0024】
しがたって、式(3)から明らかなように、Lが既知であるときは、角度θaおよびθbを測定すれば点Pまでの距離ρを求めることができる。
【0025】
ここで、式(3)から、角度θaおよびθbの測定誤差dθaおよびdθbと、距離ρの誤差dρとの関係は、次のように表すことができる。
【0026】
dρ = (∂ρ/∂θa)dθa + (∂ρ/∂θb) dθb
= (ρ2/L) {(sinθa)−2 dθa + (sinθb)−2 dθb} (4)
【0027】
一般に、カメラ中心間距離(基線長)Lは数cmから数十cm程度であるのに対し、対象物Pまでの距離ρは数m程度など十分に大きいことが多く、この場合、θa≒θb≒θの近似を適用できる。そこで、式(4)においてθa≒θb≒θと近似すると、次式が得られる。
dρ ≒ 2(ρ2/L) (sinθ)−2 dθ (5)
【0028】
式(5)から、測定距離ρの誤差dρは、距離ρの2乗に比例し、sinθの2乗に反比例し、かつカメラ間距離Lに反比例することがわかる。
【0029】
このため、車両10に対してx方向(路面平行方向)に沿って2台のカメラを配置すると、x方向に広角になるほど、θが0度または180度に近づいてsinθが0に近づき、測定距離の誤差dρが増大してしまうという問題が生じる。したがって、x方向に広角な撮影を行うためには、ステレオカメラはx方向に沿って配置するのではなく、y方向に沿う直線上またはy方向に沿う直線上から所定の角度を有する直線上に配置することが好ましい。
【0030】
続いて、2台のカメラをy方向(路面法線方向)に沿って配置しても、各カメラのX方向(行方向)がx方向(路面平行方向)に平行であるとローリングシャッタ法に起因する測定距離の誤差が生じてしまう原理について説明する。
【0031】
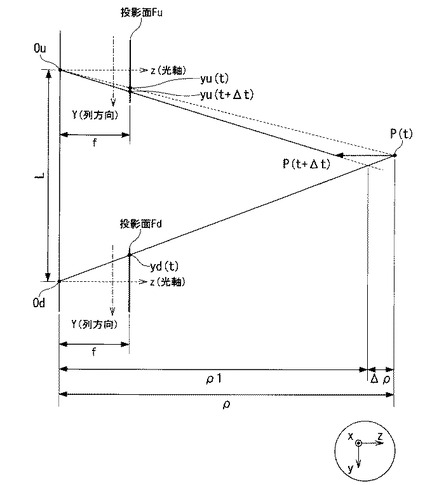
図5は、ローリングシャッタ法で駆動される2台のカメラがy方向(路面法線方向)に沿って配置されるとともに各カメラのX方向(行方向)がx方向に平行である場合において生じる、ローリングシャッタ法に起因する測定距離の誤差を説明するための図である。なお、対象点Pとカメラとは相対的に近づいているものとする。また、以下の説明では2台のカメラの光軸方向がz方向に平行である場合の例について示すが、2台のカメラの光軸方向は必ずしもz方向に平行でなくても構わない。
【0032】
2台のカメラのうち、上側(路面12から遠い側)のカメラの中心をOu、下側(路面12に近い側)のカメラの中心をOdとする。また、各カメラのY軸(列方向軸)の向きは同一であり、各カメラの上側に撮像素子の先頭行21、下側に最終行22が位置するものとする。
【0033】
時刻t=tにおける対象点Pの位置をP(t)とし、上下の各カメラの焦点距離fに位置する投影面をそれぞれFuおよびFdとし、投影面FuおよびFdに投影された対象点P(t)のy座標をそれぞれyu(t)およびyd(t)とする。
【0034】
このとき、各カメラのX方向(行方向)がx方向に平行であると、行間の露光時刻の差のために、対象点Pが観測されるタイミングが投影面FuとFdで異なることになってしまう。
【0035】
たとえば、図5に示すように、対象点Pの上側カメラにおける投影点が光軸より下にあり、かつ下側カメラにおける投影点が光軸より上にある場合を考える。上下のカメラの先頭行から同時に露光が開始されるとすると、たとえば下側カメラが投影点yd(t)に対応する行の露光を行った時刻t=tでは、上側カメラはy座標がyd(t)からLを減じた位置に対応する行の露光を行っており、いまだ投影点yu(t)の露光を行っていない状態にある。すなわち、上側カメラは、下側カメラより遅れて対象点Pをキャプチャすることになる。
【0036】
この遅れ時間をΔtとすると、対象点Pはこの時間Δtの間にもカメラに近づいており、その位置はP(t+Δt)に移動している。このため、この上下2台のカメラにより撮影された画像に対して三角測量法を適用すると、求められる測定距離ρ1は、直線OuP(t+Δt)と直線OdP(t)との交点までの距離となる。したがって、測定距離ρ1は、時刻t=tにおける実際の距離ρに対して誤差Δρを有してしまう。
【0037】
そこで、図3に示したように、本実施形態に係る車載用カメラ1および2は、車載用カメラ1および2のカメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように、y方向(路面の法線方向)に沿って上下に配置される。
【0038】
続いて、エピポーラ面とエピポーラ線について簡単に説明する。
【0039】
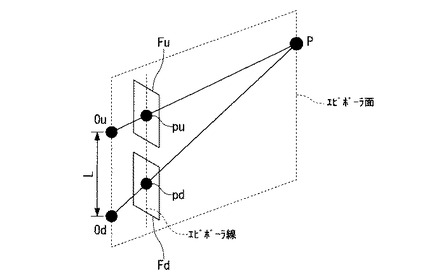
図6は、エピポーラ面とエピポーラ線について説明するための図である。
【0040】
3次元空間の任意の点Pを2台のピンホールカメラで撮影する場合を考える。カメラ中心間距離(基線長)OuOd=L、各カメラ焦点fにある投影面をFuおよびFdとする。また、点Pは、投影面Fu上の点puおよび投影面Fd上の点pdに対応するものとする。
【0041】
点P、点Ouおよび点Odの3点を通る平面は、エピポーラ面と呼ばれる。また、エピポーラ面と投影面FuおよびFlとの交線は、エピポーラ線と呼ばれる。たとえば2台のカメラがy方向に沿って配設されている場合、エピポーラ面は路面12に垂直となる。したがって、図3および図6から明らかなように、本実施形態に係る車載用カメラ1および2は、エピポーラ線と、カメラ間中心線OuOdと、撮像素子のX方向(行方向)と、が互いに平行になるように車体13に配置されているといえる。
【0042】
本実施形態に係る車載用カメラ1および2は、y方向(路面の法線方向)に沿って上下に配置される。このため、式(5)における角度θは、路面12に垂直な面内で定義される。したがって、x方向(路面平行方向)に広角になっても、θには影響せずにsinθは一定となる。よって誤差も一定となり、x方向(路面平行方向)に広角になっても測定距離の誤差が増大することがない。
【0043】
また、本実施形態に係る車載用カメラ1および2は、カメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行であり、かつ先頭行21から最終行22への向きが一致するように配置されている。このため、車載用カメラ1および2は、ほぼ同時に観測点Pを観測することができる。したがって、本実施形態に係る車載用カメラ1および2によれば、図5に示すようなローリングシャッタ法に起因する測定距離の誤差を大きく低減することができる。
【0044】
したがって、本実施形態に係る車載用カメラ1および2を配置された車両10によれば、ローリングシャッタ法で駆動される2台の車載用カメラ1および2を用いて、車両10から対象物Pまでの距離ρが時間変化する場合であっても距離ρを正確に測定することができる。
【0045】
図7は、2台の車載用カメラ1および2が設けられた車両10の変形例を示す概略的な構成図である。図7(a)は車両10の横側面図、(b)は車両10の平面図を、それぞれ示す。
【0046】
図3、図5および図6に示すように、ローリングシャッタ法に起因する測定距離の誤差は、同一の時刻における2台のカメラのサンプリング行が同一直線上に並ぶようにすることで低減できるとともに、この同時に露光するサンプリング行が並んだ直線がエピポーラ線に平行となるようにすることで低減できる。
【0047】
このため、ローリングシャッタ法に起因する測定距離の誤差を低減するためには、車載用カメラ1および2は、カメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように、配置されればよい。したがって、車載用カメラ1および2は、必ずしもカメラ間中心線OuOdが路面法線方向に沿って配置されずともよく、カメラ間中心線OuOdが路面となす角が垂直に対して所定の角度を持つように配置されてもよい。
【0048】
車載用カメラ1および2のカメラ間中心線OuOdが路面となす角が垂直に対して所定の角度を持つように車載用カメラ1および2を配置する場合、上述した垂直に配置する場合に比べて、路面平行方向に視野角が広角になった際の測定距離の誤差が多少生じるおそれがあるものの、車体13に対する車載用カメラ1および2の配置位置の自由度が非常に向上するため大変便利である。
【0049】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0050】
1、2 車載用カメラ
10 車両
11 タイヤ
12 路面
13 車体
14 距離算出部
21 先頭行
22 最終行
【技術分野】
【0001】
本発明の実施形態は、車載用カメラに関する。
【背景技術】
【0002】
自動車などの車両の運転を支援するための技術の一つとして、車両から対象物までの距離を求める技術がある。この種の距離計測技術としては、2台のカメラを車両に設けてステレオカメラとし、このステレオカメラの撮影画像にもとづいて三角測量法を行う技術が知られている。ステレオカメラを用いた三角測量法によれば、対象物までの距離が測定できるとともに、対象物の3次元空間的な位置を推定することも可能である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−146217号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
三角測量法における測定距離の誤差は、2台のカメラ中心を結ぶ線と、一方のカメラの中心と対象物とを結ぶ線と、のなす角をθとしたとき、sinθの2乗に反比例する。このため、2台のカメラを路面に平行な方向に沿って設置する場合、路面平行方向の視野角が広角になると、θが0度または180度に近づき測定距離の誤差が大きくなってしまう。
【0005】
そこで、路面平行方向の視野角が広角になっても測定距離の誤差を小さく保つ方法として、2台のカメラを路面に垂直な方向に並べて車両に設置する方法が考えられる。
【0006】
しかし、2台のカメラを路面に垂直な方向に並べて設置する場合であっても、カメラがXYアドレス読み出し法(以下、ローリングシャッタ法という)により駆動されるとともにカメラのライン方向が路面に平行であるときは、ローリングシャッタ法に起因するライン間のサンプリング時刻の違いにより測定距離に誤差が生じてしまう。
【0007】
このローリングシャッタ法に起因する測定距離の誤差は、撮影画像内で対象物画像が静止している場合には大きな問題とはならない。ところが、車載用カメラは車両の移動とともにカメラ自体が移動するため、車載用カメラによる撮影画像内の対象物画像は動いている場合が多い。このため、2台のカメラを路面に垂直に並べて設置する場合であっても、カメラがローリングシャッタ法により駆動されるとともにカメラのライン方向が路面に平行であるときは、ローリングシャッタ法に起因する測定距離の誤差の影響を無視することができない。
【課題を解決するための手段】
【0008】
本発明の一実施形態に係る車載用カメラは、上述した課題を解決するために、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
【図面の簡単な説明】
【0009】
【図1】本発明の一実施形態に係る2台の車載用カメラが設けられた車両の一例を示す概略的な構成図であり、(a)は車両の横側面図、(b)は車両の平面図。
【図2】車載用カメラのイメージセンサの動作について説明するための図。
【図3】本実施形態に係る2台の車載用カメラのX方向と取り付け位置との関係を示す説明図。
【図4】ステレオカメラを用いた三角測量法の原理を説明するための図。
【図5】ローリングシャッタ法で駆動される2台のカメラがy方向(路面法線方向)に沿って配置されるとともに各カメラのX方向(行方向)がx方向に平行である場合において生じる、ローリングシャッタ法に起因する測定距離の誤差を説明するための図。
【図6】エピポーラ面とエピポーラ線について説明するための図。
【図7】2台の車載用カメラが設けられた車両の変形例を示す概略的な構成図であり、(a)は車両の横側面図、(b)は車両の平面図。
【発明を実施するための形態】
【0010】
本発明に係る車載用カメラの実施の形態について、添付図面を参照して説明する。
【0011】
図1は、本発明の一実施形態に係る2台の車載用カメラ1および2が設けられた車両10の一例を示す概略的な構成図である。図1(a)は車両10の横側面図、(b)は車両10の平面図をそれぞれ示す。なお、以下の説明では、図1に示すように、タイヤ11が接地する路面12に対して平行な車体13の単軸方向をx方向、路面12の法線方向をy方向、車体13の長軸方向をz方向とする。
【0012】
図1(a)および(b)に示すように、車体13の一側面には、2台の車載用カメラ1および2がy方向に沿って上下に配置される。以下の説明では、上側(路面12から遠い側)に車載用カメラ1が配置され、下側(路面12に近い側)に車載用カメラ2が配置されるものとする。
【0013】
車載用カメラ1および2はそれぞれ、行列に配置された撮像素子を有しローリングシャッタ法(XYアドレス読み出し法)により画像信号を出力するCMOS(Complementary Metal Oxide Semiconductor)イメージセンサなどにより構成される。
【0014】
距離算出部14は、車載用カメラ1および2からそれぞれの撮影画像を取得し、これらの撮影画像にもとづいて撮影画像に含まれる対象点までの距離を三角測量法により算出する。この距離算出部14は、たとえばCPU、RAM、ROMを備えたマイクロコントローラにより構成することができる。車載用カメラ1および2と距離算出部14により、車両10から対象点までの距離を算出することができる。
【0015】
図2は、車載用カメラ1のイメージセンサの動作について説明するための図である。なお、以下の説明では、イメージセンサを構成する撮像素子の行方向をX方向、列方向をY方向とする場合の例について示す。車載用カメラ2は、車載用カメラ1と同一の構成および作用を有するため、説明を省略する。
【0016】
ローリングシャッタ法(XYアドレス読み出し法)では、1枚のフレーム画像を作成する際に、先頭行21から画素行ごとに順次シャッタ動作を行って画像信号を取り出し、フレーム周期以内に最終行22までの読み出し動作を完了するようになっている。このため、同一行の(X方向に並んだ)撮像素子間ではサンプリング時刻(露光時刻、観測時刻)が等しいが、先頭行21から最終行22に向かって行ごとにサンプリング時刻が所定のずれ時間ずつ遅れる。このため、先頭行21の露光時刻に比べ、最終行22に近づくほど露光時刻が遅れていく。たとえば、フィールド周波数が60Hzの場合、読出し開始から完了するまでに約1/60秒かかる。この場合、先頭行21と最終行22との露光時刻の差は約1/60秒となる。
【0017】
図3は、本実施形態に係る2台の車載用カメラ1および2のX方向と取り付け位置との関係を示す説明図である。
【0018】
図3に示すように、本実施形態に係る車載用カメラ1および2は、y方向(路面の法線方向)に沿って上下に配置される。これは、2台のカメラをx方向(路面平行方向)に沿って左右に配置する場合における、x方向が広角になるに従い測定距離の誤差が増大する問題を未然に防ぐためである。また、図3に示すように、本実施形態に係る車載用カメラ1および2は、車載用カメラ1および2の中心を結ぶカメラ間中心線とそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように配置される。これは、たとえ2台のカメラをy方向(路面法線方向)に沿って配置しても、各カメラのX方向(行方向)がx方向(路面平行方向)に平行であると、ローリングシャッタ法に起因する測定距離の誤差が生じてしまうためである。
【0019】
まず、2台のカメラをx方向に沿って左右に配置する場合における、x方向が広角になるに従い測定距離の誤差が増大する問題について説明する。
【0020】
図4は、ステレオカメラを用いた三角測量法の原理を説明するための図である。
【0021】
ステレオカメラの一方のカメラの中心をOa、他方のカメラの中心をOb、撮影対象点をPとし、カメラ中心間距離(基線長)をLとする。また、直線OaOb(カメラ間中心線)と直線POaのなす角をθa、直線OaObと直線PObのなす角をθb、直線POaと直線PObのなす角をθαとする。また、線分POaの長さをρa、線分PObの長さをρb、直線OaObと対象点Pとの距離をρとする。このとき、正弦定理から次の式(1)が得られる。
ρa/sinθb = L/sinθα
= L/sin(θa−θb) (∵θα=θa−θb) (1)
【0022】
また、直線OaObと対象点Pとの距離ρは次式(2)のように書ける。
ρ = ρa・sin(π−θa) = ρa・sinθa (2)
【0023】
よって、式(1)および(2)から次の式(3)を得ることができる。
ρ = L・sinθa・sinθb / sin(θa−θb) (3)
【0024】
しがたって、式(3)から明らかなように、Lが既知であるときは、角度θaおよびθbを測定すれば点Pまでの距離ρを求めることができる。
【0025】
ここで、式(3)から、角度θaおよびθbの測定誤差dθaおよびdθbと、距離ρの誤差dρとの関係は、次のように表すことができる。
【0026】
dρ = (∂ρ/∂θa)dθa + (∂ρ/∂θb) dθb
= (ρ2/L) {(sinθa)−2 dθa + (sinθb)−2 dθb} (4)
【0027】
一般に、カメラ中心間距離(基線長)Lは数cmから数十cm程度であるのに対し、対象物Pまでの距離ρは数m程度など十分に大きいことが多く、この場合、θa≒θb≒θの近似を適用できる。そこで、式(4)においてθa≒θb≒θと近似すると、次式が得られる。
dρ ≒ 2(ρ2/L) (sinθ)−2 dθ (5)
【0028】
式(5)から、測定距離ρの誤差dρは、距離ρの2乗に比例し、sinθの2乗に反比例し、かつカメラ間距離Lに反比例することがわかる。
【0029】
このため、車両10に対してx方向(路面平行方向)に沿って2台のカメラを配置すると、x方向に広角になるほど、θが0度または180度に近づいてsinθが0に近づき、測定距離の誤差dρが増大してしまうという問題が生じる。したがって、x方向に広角な撮影を行うためには、ステレオカメラはx方向に沿って配置するのではなく、y方向に沿う直線上またはy方向に沿う直線上から所定の角度を有する直線上に配置することが好ましい。
【0030】
続いて、2台のカメラをy方向(路面法線方向)に沿って配置しても、各カメラのX方向(行方向)がx方向(路面平行方向)に平行であるとローリングシャッタ法に起因する測定距離の誤差が生じてしまう原理について説明する。
【0031】
図5は、ローリングシャッタ法で駆動される2台のカメラがy方向(路面法線方向)に沿って配置されるとともに各カメラのX方向(行方向)がx方向に平行である場合において生じる、ローリングシャッタ法に起因する測定距離の誤差を説明するための図である。なお、対象点Pとカメラとは相対的に近づいているものとする。また、以下の説明では2台のカメラの光軸方向がz方向に平行である場合の例について示すが、2台のカメラの光軸方向は必ずしもz方向に平行でなくても構わない。
【0032】
2台のカメラのうち、上側(路面12から遠い側)のカメラの中心をOu、下側(路面12に近い側)のカメラの中心をOdとする。また、各カメラのY軸(列方向軸)の向きは同一であり、各カメラの上側に撮像素子の先頭行21、下側に最終行22が位置するものとする。
【0033】
時刻t=tにおける対象点Pの位置をP(t)とし、上下の各カメラの焦点距離fに位置する投影面をそれぞれFuおよびFdとし、投影面FuおよびFdに投影された対象点P(t)のy座標をそれぞれyu(t)およびyd(t)とする。
【0034】
このとき、各カメラのX方向(行方向)がx方向に平行であると、行間の露光時刻の差のために、対象点Pが観測されるタイミングが投影面FuとFdで異なることになってしまう。
【0035】
たとえば、図5に示すように、対象点Pの上側カメラにおける投影点が光軸より下にあり、かつ下側カメラにおける投影点が光軸より上にある場合を考える。上下のカメラの先頭行から同時に露光が開始されるとすると、たとえば下側カメラが投影点yd(t)に対応する行の露光を行った時刻t=tでは、上側カメラはy座標がyd(t)からLを減じた位置に対応する行の露光を行っており、いまだ投影点yu(t)の露光を行っていない状態にある。すなわち、上側カメラは、下側カメラより遅れて対象点Pをキャプチャすることになる。
【0036】
この遅れ時間をΔtとすると、対象点Pはこの時間Δtの間にもカメラに近づいており、その位置はP(t+Δt)に移動している。このため、この上下2台のカメラにより撮影された画像に対して三角測量法を適用すると、求められる測定距離ρ1は、直線OuP(t+Δt)と直線OdP(t)との交点までの距離となる。したがって、測定距離ρ1は、時刻t=tにおける実際の距離ρに対して誤差Δρを有してしまう。
【0037】
そこで、図3に示したように、本実施形態に係る車載用カメラ1および2は、車載用カメラ1および2のカメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように、y方向(路面の法線方向)に沿って上下に配置される。
【0038】
続いて、エピポーラ面とエピポーラ線について簡単に説明する。
【0039】
図6は、エピポーラ面とエピポーラ線について説明するための図である。
【0040】
3次元空間の任意の点Pを2台のピンホールカメラで撮影する場合を考える。カメラ中心間距離(基線長)OuOd=L、各カメラ焦点fにある投影面をFuおよびFdとする。また、点Pは、投影面Fu上の点puおよび投影面Fd上の点pdに対応するものとする。
【0041】
点P、点Ouおよび点Odの3点を通る平面は、エピポーラ面と呼ばれる。また、エピポーラ面と投影面FuおよびFlとの交線は、エピポーラ線と呼ばれる。たとえば2台のカメラがy方向に沿って配設されている場合、エピポーラ面は路面12に垂直となる。したがって、図3および図6から明らかなように、本実施形態に係る車載用カメラ1および2は、エピポーラ線と、カメラ間中心線OuOdと、撮像素子のX方向(行方向)と、が互いに平行になるように車体13に配置されているといえる。
【0042】
本実施形態に係る車載用カメラ1および2は、y方向(路面の法線方向)に沿って上下に配置される。このため、式(5)における角度θは、路面12に垂直な面内で定義される。したがって、x方向(路面平行方向)に広角になっても、θには影響せずにsinθは一定となる。よって誤差も一定となり、x方向(路面平行方向)に広角になっても測定距離の誤差が増大することがない。
【0043】
また、本実施形態に係る車載用カメラ1および2は、カメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行であり、かつ先頭行21から最終行22への向きが一致するように配置されている。このため、車載用カメラ1および2は、ほぼ同時に観測点Pを観測することができる。したがって、本実施形態に係る車載用カメラ1および2によれば、図5に示すようなローリングシャッタ法に起因する測定距離の誤差を大きく低減することができる。
【0044】
したがって、本実施形態に係る車載用カメラ1および2を配置された車両10によれば、ローリングシャッタ法で駆動される2台の車載用カメラ1および2を用いて、車両10から対象物Pまでの距離ρが時間変化する場合であっても距離ρを正確に測定することができる。
【0045】
図7は、2台の車載用カメラ1および2が設けられた車両10の変形例を示す概略的な構成図である。図7(a)は車両10の横側面図、(b)は車両10の平面図を、それぞれ示す。
【0046】
図3、図5および図6に示すように、ローリングシャッタ法に起因する測定距離の誤差は、同一の時刻における2台のカメラのサンプリング行が同一直線上に並ぶようにすることで低減できるとともに、この同時に露光するサンプリング行が並んだ直線がエピポーラ線に平行となるようにすることで低減できる。
【0047】
このため、ローリングシャッタ法に起因する測定距離の誤差を低減するためには、車載用カメラ1および2は、カメラ間中心線OuOdとそれぞれの撮像素子のX方向(行方向)とが平行となるように、かつ先頭行21から最終行22への向きが一致するように、配置されればよい。したがって、車載用カメラ1および2は、必ずしもカメラ間中心線OuOdが路面法線方向に沿って配置されずともよく、カメラ間中心線OuOdが路面となす角が垂直に対して所定の角度を持つように配置されてもよい。
【0048】
車載用カメラ1および2のカメラ間中心線OuOdが路面となす角が垂直に対して所定の角度を持つように車載用カメラ1および2を配置する場合、上述した垂直に配置する場合に比べて、路面平行方向に視野角が広角になった際の測定距離の誤差が多少生じるおそれがあるものの、車体13に対する車載用カメラ1および2の配置位置の自由度が非常に向上するため大変便利である。
【0049】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0050】
1、2 車載用カメラ
10 車両
11 タイヤ
12 路面
13 車体
14 距離算出部
21 先頭行
22 最終行
【特許請求の範囲】
【請求項1】
行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、
前記2台の車載用カメラは、前記2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの前記撮像素子の行方向が前記カメラ間中心線に平行となるとともにそれぞれの前記先頭行から最終行への向きが一致するように、車両に配置されたことを特徴とする車載用カメラ。
【請求項2】
前記2台の車載用カメラは、
前記カメラ間中心線が路面となす角が垂直に対して所定の角度をもつように、かつそれぞれの前記撮像素子の行方向が前記カメラ間中心線に平行となるとともにそれぞれの前記先頭行から最終行への向きが一致するように、前記車両に配置された、
請求項1記載の車載用カメラ。
【請求項3】
前記2台の車載用カメラのそれぞれの撮影画像は、
前記車両から前記それぞれの撮影画像に含まれる対象点までの距離を三角測量法により算出する距離算出部に与えられる、
請求項1または2に記載の車載用カメラ。
【請求項1】
行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、
前記2台の車載用カメラは、前記2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの前記撮像素子の行方向が前記カメラ間中心線に平行となるとともにそれぞれの前記先頭行から最終行への向きが一致するように、車両に配置されたことを特徴とする車載用カメラ。
【請求項2】
前記2台の車載用カメラは、
前記カメラ間中心線が路面となす角が垂直に対して所定の角度をもつように、かつそれぞれの前記撮像素子の行方向が前記カメラ間中心線に平行となるとともにそれぞれの前記先頭行から最終行への向きが一致するように、前記車両に配置された、
請求項1記載の車載用カメラ。
【請求項3】
前記2台の車載用カメラのそれぞれの撮影画像は、
前記車両から前記それぞれの撮影画像に含まれる対象点までの距離を三角測量法により算出する距離算出部に与えられる、
請求項1または2に記載の車載用カメラ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−70177(P2013−70177A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206307(P2011−206307)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(504113008)東芝アルパイン・オートモティブテクノロジー株式会社 (110)
【Fターム(参考)】
[ Back to top ]