
車載用ジャイロのオフセット補正装置
【課題】車両が走行中であってもピッチレートジャイロのオフセットを補正できる車載用ジャイロのオフセット補正装置を提供する。
【解決手段】オフセット補正手段104が、ピッチレートジャイロ101により検出された回転角から求めた角速度のうちヨーレートジャイロ102が検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロ101のオフセット値として補正を行うものである。
【解決手段】オフセット補正手段104が、ピッチレートジャイロ101により検出された回転角から求めた角速度のうちヨーレートジャイロ102が検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロ101のオフセット値として補正を行うものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は温度や湿度の変動により発生する車載用ジャイロのオフセット電圧(以下「オフセット」と称する)を補正することができる車載用ジャイロのオフセット補正装置に関するものである。
【背景技術】
【0002】
従来の車載用ジャイロのオフセット補正装置としては、GPS受信機の出力から車両の旋回角を求めるとともに、ジャイロの出力データを積算して車両の旋回角を求め、これら2つの角度の差に基づいて車両の走行中でもオフセットを求めジャイロの出力を補正するものがある。なお、先行技術文献としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−26865号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車載用ジャイロのオフセット補正装置にて補正するのは車両の鉛直方向を軸とする回転の角速度(以下「ヨーレート」と称する)を検出するジャイロセンサ(以下「ヨーレートジャイロ」と称する)である。
【0005】
近年、このヨーレートジャイロに加えて、道路傾斜を算出する目的で車両の左右方向を軸とした回転の角速度(以下「ピッチレート」と称する)を検出するジャイロセンサ(以下「ピッチレートジャイロ」と称する)が車両に搭載されつつある。
【0006】
従来の車載用ジャイロのオフセット補正装置をこのピッチレートジャイロのオフセット補正に適用すると以下の問題がある。
【0007】
ヨーレートジャイロのオフセットを補正する場合は、GPS(Global Positioning System)受信機から求めた方位変化情報を用いてヨーレート成分のみを除去すればよい。一方、ピッチレートジャイロのオフセットを補正する場合はヨーレート成分を除去する必要がある。
【0008】
車両が頻繁に停止する場合であればオフセット補正は容易である。車両停止時のジャイロセンサの出力には車両の振動や電源電圧変動などによるノイズ成分とオフセットしか存在していない。このため、平均化処理によりこれらノイズ成分を除去すれば容易にオフセットを算出して除去することができるからである。
【0009】
一方、車両が走行中である場合のピッチレートジャイロのオフセット補正は容易ではない、ピッチレートジャイロの検出結果には、例えば、車両が傾斜のある道路を右左折する時などにはヨーレートの角速度成分が重畳してしまう。これはピッチレートジャイロの検出軸が傾くために発生するものである。このような場合においてはヨーレートの角速度成分をピッチレートジャイロの検出結果から除去しないとピッチレートジャイロのオフセットを正確に算出することができない。
【0010】
本発明は、従来の問題を解決するためになされたもので、走行中においてもピッチレートジャイロのオフセットを正確に補正することができる車載用ジャイロのオフセット補正
装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明は、ピッチレートジャイロにより検出された回転角から求めた角速度のうちヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロのオフセット値として補正を行うものである。
【発明の効果】
【0012】
本発明の車載用ジャイロのオフセット補正装置は、ヨーレートの角速度が所定の角速度Aより大きい期間のピッチレートの角速度を除いてピッチレートの角速度の平均値を算出する。
【0013】
このように、本発明の車載用ジャイロのオフセット補正装置はヨーレートの影響を受けない期間におけるピッチレートの角速度を用いてオフセットを算出するため、走行中においてもピッチレートジャイロのオフセットを正確に補正することができるという効果を奏するものである。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施の形態におけるナビゲーション装置のブロック図
【図2】本発明の一実施の形態におけるオフセット補正装置のブロック図
【図3】同装置の動作を説明するためのフロー図
【図4】同装置の取付け角度とヨーレートとの関係を説明する図
【図5】各ジャイロの出力値について説明するための図
【発明を実施するための形態】
【0015】
以下、本発明の一実施の形態におけるオフセット補正装置を備えるナビゲーション装置2について図1および図2を参照しながら説明する。
【0016】
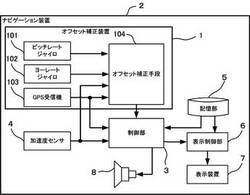
図1は本発明の一実施の形態におけるナビゲーション装置のブロック図であり、図2は本発明の一実施の形態におけるオフセット補正装置のブロック図である。
【0017】
本発明の一実施の形態におけるナビゲーション装置は、後述する各種ジャイロセンサの出力の誤差等を補正した結果を出力するオフセット補正装置1と、このオフセット補正装置1の出力、および、加速度センサ4の検出結果に基づき、ナビゲーション装置2が備えられた車両の現在位置を算出する制御部3を備える。
【0018】
また、制御部3は算出した現在位置に対応する地図画像を記憶部5から読出し表示制御部6へ出力する。この表示制御部6は地図画像を表示装置7へ表示する。
【0019】
また、ナビゲーション装置2はスピーカ8を備え、制御部3は、スピーカ8から音声にてナビゲーション装置2の利用者に目的地への経路等を案内するように制御する。
【0020】
以下、上記の各構成について詳細に説明する。
【0021】
オフセット補正装置1は、ピッチレートを算出するピッチレートジャイロ101の出力からオフセット値を補正(以下、「オフセット補正」と称する)して出力するものである。
【0022】
オフセット補正装置1は、ピッチレートジャイロ101のオフセット補正を行うオフセ
ット補正手段104を備える。このオフセット補正手段104は、ヨーレートを算出するヨーレートジャイロ102、および、GPS受信機103の少なくとも1つの出力を加味してピッチレートジャイロ101のオフセット補正を行う。オフセット補正手段104の構成については後述する。
【0023】
ピッチレートジャイロ101は、車両の左右方向を軸とした回転の角速度であるピッチレートを算出して出力(以下、「ピッチレート値」と称する)するジャイロセンサである。ピッチ回転方向を軸に設置することで、自車の上下方向の相対的な回転量を算出することができる。このピッチレート値を積分することで、道路傾斜の算出などに応用することができる。
【0024】
ヨーレートジャイロ102は、車両の鉛直方向を軸とする回転の角速度であるヨーレートを算出して出力(以下、「ヨーレート値」と称する)するジャイロセンサである。このヨーレート値から自車の進行方向の相対的な方位変化量を算出することが可能である。GPS受信機や地磁気センサ等と組み合わせることで、自車の絶対方位を算出することができる。
【0025】
ピッチレートジャイロ101、および、ヨーレートジャイロ102は、例えば、機械式ジャイロ、振動ジャイロのいずれで構成されてもよい。
【0026】
GPS受信機103は、複数のGPS衛星からの電波を受信し、この受信した信号を復調することで受信機の絶対位置を計測するものである。
【0027】
制御部3は、ナビゲーション装置2の各部を制御するものである。制御部3は、例えば、CPUと、このCPUを制御するプログラムを記憶したROM(Read Only Memory)と、一時的にデータを記憶するRAM(Random Access Memory)とから構成される。CPUはROMに格納されるプログラムを読出して実行する。
【0028】
加速度センサ4は、少なくとも前後方向検知軸の加速度を検知してこの結果(以下、「加速度情報」と称する)を出力するものである。加速度センサ4は左右方向検知軸の加速度、鉛直方向検知軸の加速度を検知することが可能なものを搭載することもできる。
【0029】
記憶部5は、各種地図情報を記憶するものである。ここで、地図情報とは、例えば、道路データ、施設データ、背景データである。記憶部9は、例えば、ハードディスク、フラッシュメモリなどの記憶媒体で構成される。
【0030】
記憶部5は、予めデータを記憶したものでなくてもよく、図示しない携帯電話等の通信手段によって配信センタからダウンロードするものであってもよい。
【0031】
表示制御部6は、制御部3の制御により記憶部5から読出された地図情報を表示装置7へ表示できるように画像処理を行う機能を有している。
【0032】
表示装置7は、液晶ディスプレイなどの表示デバイスからなり、制御部3の制御により自車位置マーク、最適経路などの案内情報と共に、自車位置周辺の地図画像を表示する機能を有している。
【0033】
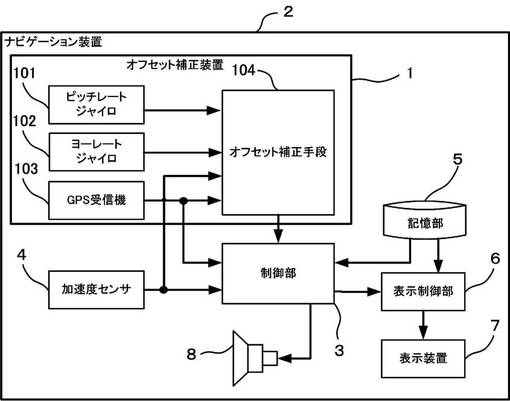
次に図2を用いてオフセット補正手段104の構成について詳細に説明する。
【0034】
オフセット補正手段104は、ピッチレートジャイロ101の出力からオフセットを除
去するオフセット除去手段105と、ピッチレートジャイロ101のオフセット値を算出するオフセット算出手段106と、車両が走行中か否かを判定する走行判定手段107にて構成される。
【0035】
オフセット除去手段105は、ピッチレートジャイロ101の出力から、オフセット算出手段106により算出されたピッチレートジャイロ101のオフセット値を除去して出力するものである。除去の方法としては、例えば、ピッチレートジャイロ101の出力からオフセット算出手段106が算出したオフセット値を引いて求める。
【0036】
オフセット算出手段106は、ピッチレートジャイロ101が出力するピッチレート値に重畳されているオフセット値を算出する。このとき、オフセット算出手段106は、ヨーレートジャイロ102が出力するヨーレート値、または、GPS受信機103の出力の少なくとも1つを加味して算出する。
【0037】
具体的には、ピッチレートジャイロ101のピッチレート値のオフセット値は、このピッチレート値を所定時間Tの期間で平均して求めるが、このとき、ヨーレートジャイロ102が出力するヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外し、ヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値を求める(算出方法1)。なお、角速度A(deg/sec)は、例えば、10(deg/sec)程度である。
【0038】
走行判定手段107は、車両が走行中であるか否かの判定を行うものである。この判定にはGPS受信機103、または、加速度センサ4の出力を用いる。
【0039】
車両が走行中であることの判断は、GPS受信機103から得られる速度情報から判定することが可能であるが、GPS受信機103は常時測位可能ではないため、加速度センサ4の出力から判断することが望ましい。
【0040】
加速度センサ4の出力から車両が走行中であるか否かの判断をする場合、加速度センサ4から出力される加速度をサンプリングし、この加速度のバラつき幅を算出する。このバラつき幅が所定の幅に収まるか否かを判断する。所定の幅に収まった場合は、車両が停止していると判定し、一方、所定の幅に収まらない場合は走行中であると判定する。
【0041】
走行判定手段107によりされた車両が走行中であるかの判定結果は、オフセット算出手段106に入力される。上記算出方法1は走行判定手段107により、車両が走行中であると判断された場合にのみ実行される。車両停止中は、ピッチレート値を平均化処理することにより容易にオフセットを算出して除去することができるからである。
【0042】
以上のように構成されたナビゲーション装置2について、図3を用いてその処理動作を説明する。
【0043】
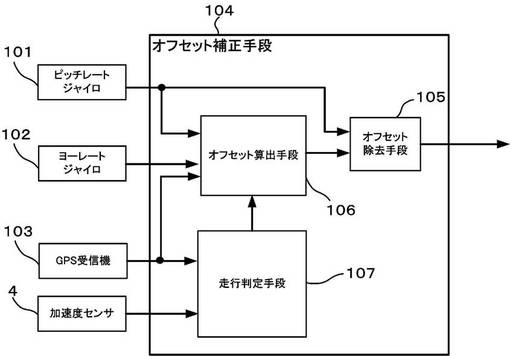
図3は本発明の一実施の形態におけるナビゲーション装置の動作を説明するためのフロー図である。より詳細には図3はオフセット補正手段104の各部が行う処理である。
【0044】
まず、ステップS01において、走行判定手段107は車両が走行中であるか判定を行う。
【0045】
走行中である場合(S01でYES)、ステップS02として、オフセット算出手段106は、ヨーレートジャイロ102からヨーレート値を取得するとともに、ピッチレートジャイロ101からピッチレート値を取得する。
【0046】
ステップS02の次に、オフセット算出手段106は、ヨーレート値が所定の角速度A(deg/sec)以下であるときのピッチレート値を抽出する(S03)。具体的には、ピッチレート値を平均化するための所定の期間(所定時間T)の間で、ヨーレート値が所定の角速度A(deg/sec)以下であるピッチレート値のみを抽出するものである。
【0047】
ステップS03の次に、オフセット算出手段106はステップS04として、抽出されたピッチレート値に対して所定時間Tごとに平均値を求める。平均化することで、ローパスフィルタの効果を得ることができるため、ピッチレート値に含まれるノイズ成分が除去されオフセット値を求めることができる。
【0048】
ここで算出されたピッチレート値の平均値にはヨーレート値成分が含まれていない。すなわち、ヨーレート値成分の影響を除去してオフセット値を求めることができる。オフセット算出手段106は求めたオフセット値をオフセット除去手段105へ出力する。
【0049】
ステップS04の次に、ステップS05として、オフセット除去手段105は、ピッチレートジャイロ101が出力するピッチレート値からオフセット算出手段106が求めたオフセット値を減じてオフセット補正を行う。オフセット除去手段105は補正後のピッチレート値を出力する。
【0050】
なお、走行中でない場合(S01でNO)、すなわち車両が停止中である場合は、オフセット算出手段106は、ピッチレート値に対して所定時間Tごとに平均値を求めることでオフセット値を算出する(ステップS06)。車両が停止中である場合はヨーレート値の影響を受けることはないためピッチレート値の抽出を行う必要はない。
【0051】
最後に、図4、および、図5を用いて本発明の一実施の形態におけるオフセット補正をグラフにて説明する。
また、図4はナビゲーション装置2の取付け角度とヨーレートとの関係を説明する図である。図5はピッチレートジャイロ101、および、ヨーレートジャイロ102の出力値について説明するための図である。
【0052】
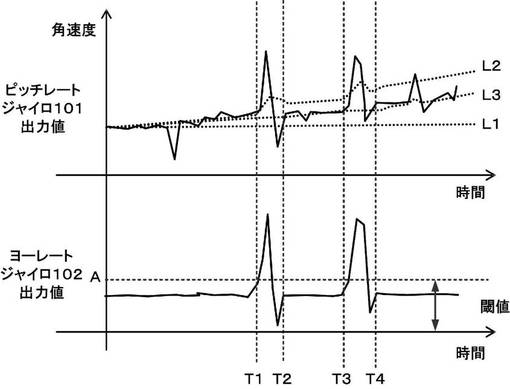
図5上段の実線グラフはピッチレートジャイロ101が出力するピッチレート値である。また、図5下段の実線グラフはヨーレートジャイロ102が出力するヨーレート値である。
【0053】
例えば、時間T1からT2までの期間のピッチレート値とヨーレート値とを比較すれば分かるように、ピッチレート値はヨーレート値の変化に影響を受ける。
【0054】
図5上段の破線グラフ(L1、L2、L3)は、時間経過に対するオフセットの設定値を表したものである。これらグラフを以下、オフセット曲線と称する。
【0055】
ここで、オフセット曲線L1は、ピッチレートジャイロ101の初期状態のオフセットを表す。また、オフセット曲線L2は、ヨーレート値の変化を考慮せずに単純にピッチレートの平均値から算出したオフセットを表す。このオフセット曲線L2は、誤って算出されたオフセット曲線である。
【0056】
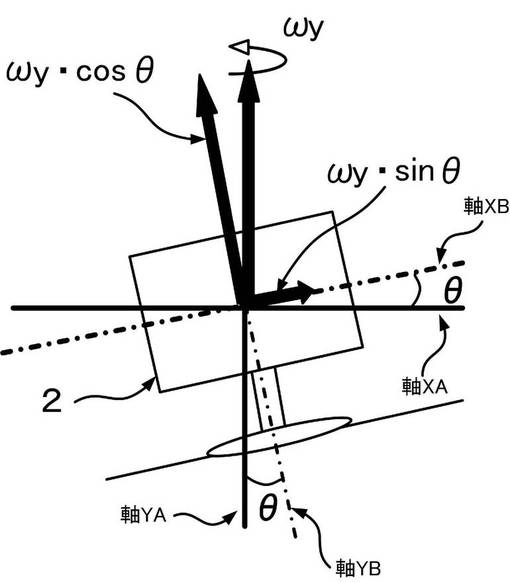
ヨーレート値が大きい場合、図5に示すように、ピッチレートジャイロ101の出力にもヨーレート成分が出力される。これは、ピッチレートジャイロ101の検知軸が傾いている上で、大きなヨーレート値が発生した場合に生じる。例えば、図4に示すように、ロ
ール傾斜θのある道路でヨーレートωyが発生した場合を考える。ここで「ロール傾斜」とは車両の左右方向の軸に対して傾きを与える傾斜をいう。
【0057】
この場合、ヨーレートジャイロ出力Vy、ピッチレートジャイロ出力Vpには、以下の関係式の通りヨーレート値が出力される。
【0058】
Vy=ωy・cosθ (式1)
Vp=ωy・sinθ (式2)
この時のピッチレートジャイロ101の出力値をオフセットの算出に用いると、ヨーレート値成分の分だけ誤差が生じる可能性がある。この誤差が生じた場合がオフセット曲線L2である。オフセット曲線L2は出力にヨーレート値成分が含まれるため実際のオフセットと異なる曲線となる。
【0059】
そこで、ヨーレートジャイロ102が出力するヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外する(図5の期間T1−T2、および、期間T3−T4)。このようにして求めたヨーレート値の平均値がオフセット曲線L3である。オフセット曲線L3は、ピッチレートジャイロ101の走行中のオフセットを表す。このオフセット曲線L3はヨーレート値の影響を除外した正しいオフセット曲線である。
【0060】
以上のように本発明の一実施の形態によれば、ヨーレート値が所定の角速度Aより大きい期間のピッチレートの角速度を除いてピッチレート値の平均値を算出する。
【0061】
ヨーレート値は車両が右左折する時に90度近い角度変化をする。これに対し、ピッチレート値はせいぜい0〜5度程度の角度変化しか生じない。また、ピッチレート値は同一回転方向に傾斜が変化し続けることがなくすぐに収束する。
【0062】
そのため、走行中のピッチレート値成分は、長期的にみればノイズ成分と同様に扱うことが可能であり平均化処理によって除去することが可能である。このことから、ピッチレートジャイロ101のオフセットを走行中に算出するには、ピッチレートジャイロ101の出力に含まれるヨーレート値成分を除去する手段が重要となる。
【0063】
ピッチレートジャイロ101の出力に含まれるヨーレート値成分は、道路傾斜やナビゲーション装置2の取付け角などに応じて変化するため除去することは容易ではない。また、ヨーレート値成分の出力の傾向が、同一回転方向に傾くことがあるため、単純に平均化処理を施しても除去することができない。
【0064】
そこで、本発明の一実施の形態ではヨーレート値の影響を受けない期間におけるピッチレート値を用いてオフセット値を算出するため、走行中においてもピッチレートジャイロのオフセットを正確に補正することができるという効果を奏するものである。
なお、本発明の一実施の形態では、ヨーレートジャイロ102からヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値(「第1の平均値」と称する)を求める(算出方法1)と記載したが、以下の方法でもよい。
【0065】
GPS受信機103により求められた現在位置の変化から車両の上下方向を軸とした回転を検出するヨーレートの角速度を算出し、このヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外し、ヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値(「第2の平均値」と称する)を求めることができる(算出方法2)。
【0066】
このようにすることにより、ヨーレートジャイロ102によりヨーレート値が正しく算出されない条件下においても、ピッチレート値からヨーレート値成分の影響を除去して正確にオフセット補正を行うことができるという効果を奏する。
【0067】
なお、算出方法1および算出方法2はいずれか1つを用いてもよいし、両方を同時に実施してもよい。トンネルやビルの多い市街地などではGPS受信機103の受信環境が悪くなるので、ヨーレートジャイロ102を用いる算出方法1が有利である。
【0068】
なお、本発明の一実施の形態では、自車両の速度が所定の値より速い場合には、第1の平均値ではなく、第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことができる。
【0069】
自車両の速度が所定の値(例えば、20km/h程度)を超えるとGPS受信機103から算出するヨーレートの精度が向上する。ヨーレートはGPS受信機103が算出した前回位置と現在位置との位置関係から求まり、その距離が長いほど、位置の算出精度の影響を受けにくくなり精度がよくなる。従って、高速で走行している場合は、所定時間における走行距離が長くなり精度が向上する。このため、自車両の速度が所定の値より速い場合には、GPS受信機103により求められた第2の平均値の方が第1の平均値よりも正確な値となり補正の精度向上に有利となる。
【0070】
なお、オフセット補正手段104は、車両が停止している際に、ヨーレートジャイロ102が出力するヨーレート値を平均化処理することでオフセットを算出して除去するようにしてもよい。
【0071】
このとき、所定時間以上、車両が停止せずに連続して走行した場合、ヨーレートジャイロ102の補正が所定時間以上実行されない。例えば、山岳路・立体駐車場のような傾斜の伴う右左折が繰り返される場所を長時間走行した場合である。このときは、ヨーレートジャイロ102の精度が低下している可能性があるため、算出方法1ではなくGPS受信機103用いる算出方法2が有利である。
【産業上の利用可能性】
【0072】
本発明にかかる車載用ジャイロのオフセット補正装置は、走行中においてもオフセットを補正することが可能であり、ジャイロセンサの検出結果に基づき自車両の現在位置を算出して表示するナビゲーション装置等に有用である。
【符号の説明】
【0073】
1 オフセット補正装置
101 ピッチレートジャイロ
102 ヨーレートジャイロ
103 GPS受信機
104 オフセット補正手段
105 オフセット除去手段
106 オフセット算出手段
107 走行判定手段
2 ナビゲーション装置
3 制御部
4 加速度センサ
5 記憶部
6 表示制御部
7 表示装置
8 スピーカ
【技術分野】
【0001】
本発明は温度や湿度の変動により発生する車載用ジャイロのオフセット電圧(以下「オフセット」と称する)を補正することができる車載用ジャイロのオフセット補正装置に関するものである。
【背景技術】
【0002】
従来の車載用ジャイロのオフセット補正装置としては、GPS受信機の出力から車両の旋回角を求めるとともに、ジャイロの出力データを積算して車両の旋回角を求め、これら2つの角度の差に基づいて車両の走行中でもオフセットを求めジャイロの出力を補正するものがある。なお、先行技術文献としては、例えば、特許文献1が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平6−26865号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車載用ジャイロのオフセット補正装置にて補正するのは車両の鉛直方向を軸とする回転の角速度(以下「ヨーレート」と称する)を検出するジャイロセンサ(以下「ヨーレートジャイロ」と称する)である。
【0005】
近年、このヨーレートジャイロに加えて、道路傾斜を算出する目的で車両の左右方向を軸とした回転の角速度(以下「ピッチレート」と称する)を検出するジャイロセンサ(以下「ピッチレートジャイロ」と称する)が車両に搭載されつつある。
【0006】
従来の車載用ジャイロのオフセット補正装置をこのピッチレートジャイロのオフセット補正に適用すると以下の問題がある。
【0007】
ヨーレートジャイロのオフセットを補正する場合は、GPS(Global Positioning System)受信機から求めた方位変化情報を用いてヨーレート成分のみを除去すればよい。一方、ピッチレートジャイロのオフセットを補正する場合はヨーレート成分を除去する必要がある。
【0008】
車両が頻繁に停止する場合であればオフセット補正は容易である。車両停止時のジャイロセンサの出力には車両の振動や電源電圧変動などによるノイズ成分とオフセットしか存在していない。このため、平均化処理によりこれらノイズ成分を除去すれば容易にオフセットを算出して除去することができるからである。
【0009】
一方、車両が走行中である場合のピッチレートジャイロのオフセット補正は容易ではない、ピッチレートジャイロの検出結果には、例えば、車両が傾斜のある道路を右左折する時などにはヨーレートの角速度成分が重畳してしまう。これはピッチレートジャイロの検出軸が傾くために発生するものである。このような場合においてはヨーレートの角速度成分をピッチレートジャイロの検出結果から除去しないとピッチレートジャイロのオフセットを正確に算出することができない。
【0010】
本発明は、従来の問題を解決するためになされたもので、走行中においてもピッチレートジャイロのオフセットを正確に補正することができる車載用ジャイロのオフセット補正
装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記目的を達成するために本発明は、ピッチレートジャイロにより検出された回転角から求めた角速度のうちヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値をピッチレートジャイロのオフセット値として補正を行うものである。
【発明の効果】
【0012】
本発明の車載用ジャイロのオフセット補正装置は、ヨーレートの角速度が所定の角速度Aより大きい期間のピッチレートの角速度を除いてピッチレートの角速度の平均値を算出する。
【0013】
このように、本発明の車載用ジャイロのオフセット補正装置はヨーレートの影響を受けない期間におけるピッチレートの角速度を用いてオフセットを算出するため、走行中においてもピッチレートジャイロのオフセットを正確に補正することができるという効果を奏するものである。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施の形態におけるナビゲーション装置のブロック図
【図2】本発明の一実施の形態におけるオフセット補正装置のブロック図
【図3】同装置の動作を説明するためのフロー図
【図4】同装置の取付け角度とヨーレートとの関係を説明する図
【図5】各ジャイロの出力値について説明するための図
【発明を実施するための形態】
【0015】
以下、本発明の一実施の形態におけるオフセット補正装置を備えるナビゲーション装置2について図1および図2を参照しながら説明する。
【0016】
図1は本発明の一実施の形態におけるナビゲーション装置のブロック図であり、図2は本発明の一実施の形態におけるオフセット補正装置のブロック図である。
【0017】
本発明の一実施の形態におけるナビゲーション装置は、後述する各種ジャイロセンサの出力の誤差等を補正した結果を出力するオフセット補正装置1と、このオフセット補正装置1の出力、および、加速度センサ4の検出結果に基づき、ナビゲーション装置2が備えられた車両の現在位置を算出する制御部3を備える。
【0018】
また、制御部3は算出した現在位置に対応する地図画像を記憶部5から読出し表示制御部6へ出力する。この表示制御部6は地図画像を表示装置7へ表示する。
【0019】
また、ナビゲーション装置2はスピーカ8を備え、制御部3は、スピーカ8から音声にてナビゲーション装置2の利用者に目的地への経路等を案内するように制御する。
【0020】
以下、上記の各構成について詳細に説明する。
【0021】
オフセット補正装置1は、ピッチレートを算出するピッチレートジャイロ101の出力からオフセット値を補正(以下、「オフセット補正」と称する)して出力するものである。
【0022】
オフセット補正装置1は、ピッチレートジャイロ101のオフセット補正を行うオフセ
ット補正手段104を備える。このオフセット補正手段104は、ヨーレートを算出するヨーレートジャイロ102、および、GPS受信機103の少なくとも1つの出力を加味してピッチレートジャイロ101のオフセット補正を行う。オフセット補正手段104の構成については後述する。
【0023】
ピッチレートジャイロ101は、車両の左右方向を軸とした回転の角速度であるピッチレートを算出して出力(以下、「ピッチレート値」と称する)するジャイロセンサである。ピッチ回転方向を軸に設置することで、自車の上下方向の相対的な回転量を算出することができる。このピッチレート値を積分することで、道路傾斜の算出などに応用することができる。
【0024】
ヨーレートジャイロ102は、車両の鉛直方向を軸とする回転の角速度であるヨーレートを算出して出力(以下、「ヨーレート値」と称する)するジャイロセンサである。このヨーレート値から自車の進行方向の相対的な方位変化量を算出することが可能である。GPS受信機や地磁気センサ等と組み合わせることで、自車の絶対方位を算出することができる。
【0025】
ピッチレートジャイロ101、および、ヨーレートジャイロ102は、例えば、機械式ジャイロ、振動ジャイロのいずれで構成されてもよい。
【0026】
GPS受信機103は、複数のGPS衛星からの電波を受信し、この受信した信号を復調することで受信機の絶対位置を計測するものである。
【0027】
制御部3は、ナビゲーション装置2の各部を制御するものである。制御部3は、例えば、CPUと、このCPUを制御するプログラムを記憶したROM(Read Only Memory)と、一時的にデータを記憶するRAM(Random Access Memory)とから構成される。CPUはROMに格納されるプログラムを読出して実行する。
【0028】
加速度センサ4は、少なくとも前後方向検知軸の加速度を検知してこの結果(以下、「加速度情報」と称する)を出力するものである。加速度センサ4は左右方向検知軸の加速度、鉛直方向検知軸の加速度を検知することが可能なものを搭載することもできる。
【0029】
記憶部5は、各種地図情報を記憶するものである。ここで、地図情報とは、例えば、道路データ、施設データ、背景データである。記憶部9は、例えば、ハードディスク、フラッシュメモリなどの記憶媒体で構成される。
【0030】
記憶部5は、予めデータを記憶したものでなくてもよく、図示しない携帯電話等の通信手段によって配信センタからダウンロードするものであってもよい。
【0031】
表示制御部6は、制御部3の制御により記憶部5から読出された地図情報を表示装置7へ表示できるように画像処理を行う機能を有している。
【0032】
表示装置7は、液晶ディスプレイなどの表示デバイスからなり、制御部3の制御により自車位置マーク、最適経路などの案内情報と共に、自車位置周辺の地図画像を表示する機能を有している。
【0033】
次に図2を用いてオフセット補正手段104の構成について詳細に説明する。
【0034】
オフセット補正手段104は、ピッチレートジャイロ101の出力からオフセットを除
去するオフセット除去手段105と、ピッチレートジャイロ101のオフセット値を算出するオフセット算出手段106と、車両が走行中か否かを判定する走行判定手段107にて構成される。
【0035】
オフセット除去手段105は、ピッチレートジャイロ101の出力から、オフセット算出手段106により算出されたピッチレートジャイロ101のオフセット値を除去して出力するものである。除去の方法としては、例えば、ピッチレートジャイロ101の出力からオフセット算出手段106が算出したオフセット値を引いて求める。
【0036】
オフセット算出手段106は、ピッチレートジャイロ101が出力するピッチレート値に重畳されているオフセット値を算出する。このとき、オフセット算出手段106は、ヨーレートジャイロ102が出力するヨーレート値、または、GPS受信機103の出力の少なくとも1つを加味して算出する。
【0037】
具体的には、ピッチレートジャイロ101のピッチレート値のオフセット値は、このピッチレート値を所定時間Tの期間で平均して求めるが、このとき、ヨーレートジャイロ102が出力するヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外し、ヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値を求める(算出方法1)。なお、角速度A(deg/sec)は、例えば、10(deg/sec)程度である。
【0038】
走行判定手段107は、車両が走行中であるか否かの判定を行うものである。この判定にはGPS受信機103、または、加速度センサ4の出力を用いる。
【0039】
車両が走行中であることの判断は、GPS受信機103から得られる速度情報から判定することが可能であるが、GPS受信機103は常時測位可能ではないため、加速度センサ4の出力から判断することが望ましい。
【0040】
加速度センサ4の出力から車両が走行中であるか否かの判断をする場合、加速度センサ4から出力される加速度をサンプリングし、この加速度のバラつき幅を算出する。このバラつき幅が所定の幅に収まるか否かを判断する。所定の幅に収まった場合は、車両が停止していると判定し、一方、所定の幅に収まらない場合は走行中であると判定する。
【0041】
走行判定手段107によりされた車両が走行中であるかの判定結果は、オフセット算出手段106に入力される。上記算出方法1は走行判定手段107により、車両が走行中であると判断された場合にのみ実行される。車両停止中は、ピッチレート値を平均化処理することにより容易にオフセットを算出して除去することができるからである。
【0042】
以上のように構成されたナビゲーション装置2について、図3を用いてその処理動作を説明する。
【0043】
図3は本発明の一実施の形態におけるナビゲーション装置の動作を説明するためのフロー図である。より詳細には図3はオフセット補正手段104の各部が行う処理である。
【0044】
まず、ステップS01において、走行判定手段107は車両が走行中であるか判定を行う。
【0045】
走行中である場合(S01でYES)、ステップS02として、オフセット算出手段106は、ヨーレートジャイロ102からヨーレート値を取得するとともに、ピッチレートジャイロ101からピッチレート値を取得する。
【0046】
ステップS02の次に、オフセット算出手段106は、ヨーレート値が所定の角速度A(deg/sec)以下であるときのピッチレート値を抽出する(S03)。具体的には、ピッチレート値を平均化するための所定の期間(所定時間T)の間で、ヨーレート値が所定の角速度A(deg/sec)以下であるピッチレート値のみを抽出するものである。
【0047】
ステップS03の次に、オフセット算出手段106はステップS04として、抽出されたピッチレート値に対して所定時間Tごとに平均値を求める。平均化することで、ローパスフィルタの効果を得ることができるため、ピッチレート値に含まれるノイズ成分が除去されオフセット値を求めることができる。
【0048】
ここで算出されたピッチレート値の平均値にはヨーレート値成分が含まれていない。すなわち、ヨーレート値成分の影響を除去してオフセット値を求めることができる。オフセット算出手段106は求めたオフセット値をオフセット除去手段105へ出力する。
【0049】
ステップS04の次に、ステップS05として、オフセット除去手段105は、ピッチレートジャイロ101が出力するピッチレート値からオフセット算出手段106が求めたオフセット値を減じてオフセット補正を行う。オフセット除去手段105は補正後のピッチレート値を出力する。
【0050】
なお、走行中でない場合(S01でNO)、すなわち車両が停止中である場合は、オフセット算出手段106は、ピッチレート値に対して所定時間Tごとに平均値を求めることでオフセット値を算出する(ステップS06)。車両が停止中である場合はヨーレート値の影響を受けることはないためピッチレート値の抽出を行う必要はない。
【0051】
最後に、図4、および、図5を用いて本発明の一実施の形態におけるオフセット補正をグラフにて説明する。
また、図4はナビゲーション装置2の取付け角度とヨーレートとの関係を説明する図である。図5はピッチレートジャイロ101、および、ヨーレートジャイロ102の出力値について説明するための図である。
【0052】
図5上段の実線グラフはピッチレートジャイロ101が出力するピッチレート値である。また、図5下段の実線グラフはヨーレートジャイロ102が出力するヨーレート値である。
【0053】
例えば、時間T1からT2までの期間のピッチレート値とヨーレート値とを比較すれば分かるように、ピッチレート値はヨーレート値の変化に影響を受ける。
【0054】
図5上段の破線グラフ(L1、L2、L3)は、時間経過に対するオフセットの設定値を表したものである。これらグラフを以下、オフセット曲線と称する。
【0055】
ここで、オフセット曲線L1は、ピッチレートジャイロ101の初期状態のオフセットを表す。また、オフセット曲線L2は、ヨーレート値の変化を考慮せずに単純にピッチレートの平均値から算出したオフセットを表す。このオフセット曲線L2は、誤って算出されたオフセット曲線である。
【0056】
ヨーレート値が大きい場合、図5に示すように、ピッチレートジャイロ101の出力にもヨーレート成分が出力される。これは、ピッチレートジャイロ101の検知軸が傾いている上で、大きなヨーレート値が発生した場合に生じる。例えば、図4に示すように、ロ
ール傾斜θのある道路でヨーレートωyが発生した場合を考える。ここで「ロール傾斜」とは車両の左右方向の軸に対して傾きを与える傾斜をいう。
【0057】
この場合、ヨーレートジャイロ出力Vy、ピッチレートジャイロ出力Vpには、以下の関係式の通りヨーレート値が出力される。
【0058】
Vy=ωy・cosθ (式1)
Vp=ωy・sinθ (式2)
この時のピッチレートジャイロ101の出力値をオフセットの算出に用いると、ヨーレート値成分の分だけ誤差が生じる可能性がある。この誤差が生じた場合がオフセット曲線L2である。オフセット曲線L2は出力にヨーレート値成分が含まれるため実際のオフセットと異なる曲線となる。
【0059】
そこで、ヨーレートジャイロ102が出力するヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外する(図5の期間T1−T2、および、期間T3−T4)。このようにして求めたヨーレート値の平均値がオフセット曲線L3である。オフセット曲線L3は、ピッチレートジャイロ101の走行中のオフセットを表す。このオフセット曲線L3はヨーレート値の影響を除外した正しいオフセット曲線である。
【0060】
以上のように本発明の一実施の形態によれば、ヨーレート値が所定の角速度Aより大きい期間のピッチレートの角速度を除いてピッチレート値の平均値を算出する。
【0061】
ヨーレート値は車両が右左折する時に90度近い角度変化をする。これに対し、ピッチレート値はせいぜい0〜5度程度の角度変化しか生じない。また、ピッチレート値は同一回転方向に傾斜が変化し続けることがなくすぐに収束する。
【0062】
そのため、走行中のピッチレート値成分は、長期的にみればノイズ成分と同様に扱うことが可能であり平均化処理によって除去することが可能である。このことから、ピッチレートジャイロ101のオフセットを走行中に算出するには、ピッチレートジャイロ101の出力に含まれるヨーレート値成分を除去する手段が重要となる。
【0063】
ピッチレートジャイロ101の出力に含まれるヨーレート値成分は、道路傾斜やナビゲーション装置2の取付け角などに応じて変化するため除去することは容易ではない。また、ヨーレート値成分の出力の傾向が、同一回転方向に傾くことがあるため、単純に平均化処理を施しても除去することができない。
【0064】
そこで、本発明の一実施の形態ではヨーレート値の影響を受けない期間におけるピッチレート値を用いてオフセット値を算出するため、走行中においてもピッチレートジャイロのオフセットを正確に補正することができるという効果を奏するものである。
なお、本発明の一実施の形態では、ヨーレートジャイロ102からヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値(「第1の平均値」と称する)を求める(算出方法1)と記載したが、以下の方法でもよい。
【0065】
GPS受信機103により求められた現在位置の変化から車両の上下方向を軸とした回転を検出するヨーレートの角速度を算出し、このヨーレート値が所定の角速度A(deg/sec)より大きい期間におけるピッチレート値は除外し、ヨーレート値が所定の角速度A以下となっている期間におけるピッチレート値で平均値(「第2の平均値」と称する)を求めることができる(算出方法2)。
【0066】
このようにすることにより、ヨーレートジャイロ102によりヨーレート値が正しく算出されない条件下においても、ピッチレート値からヨーレート値成分の影響を除去して正確にオフセット補正を行うことができるという効果を奏する。
【0067】
なお、算出方法1および算出方法2はいずれか1つを用いてもよいし、両方を同時に実施してもよい。トンネルやビルの多い市街地などではGPS受信機103の受信環境が悪くなるので、ヨーレートジャイロ102を用いる算出方法1が有利である。
【0068】
なお、本発明の一実施の形態では、自車両の速度が所定の値より速い場合には、第1の平均値ではなく、第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことができる。
【0069】
自車両の速度が所定の値(例えば、20km/h程度)を超えるとGPS受信機103から算出するヨーレートの精度が向上する。ヨーレートはGPS受信機103が算出した前回位置と現在位置との位置関係から求まり、その距離が長いほど、位置の算出精度の影響を受けにくくなり精度がよくなる。従って、高速で走行している場合は、所定時間における走行距離が長くなり精度が向上する。このため、自車両の速度が所定の値より速い場合には、GPS受信機103により求められた第2の平均値の方が第1の平均値よりも正確な値となり補正の精度向上に有利となる。
【0070】
なお、オフセット補正手段104は、車両が停止している際に、ヨーレートジャイロ102が出力するヨーレート値を平均化処理することでオフセットを算出して除去するようにしてもよい。
【0071】
このとき、所定時間以上、車両が停止せずに連続して走行した場合、ヨーレートジャイロ102の補正が所定時間以上実行されない。例えば、山岳路・立体駐車場のような傾斜の伴う右左折が繰り返される場所を長時間走行した場合である。このときは、ヨーレートジャイロ102の精度が低下している可能性があるため、算出方法1ではなくGPS受信機103用いる算出方法2が有利である。
【産業上の利用可能性】
【0072】
本発明にかかる車載用ジャイロのオフセット補正装置は、走行中においてもオフセットを補正することが可能であり、ジャイロセンサの検出結果に基づき自車両の現在位置を算出して表示するナビゲーション装置等に有用である。
【符号の説明】
【0073】
1 オフセット補正装置
101 ピッチレートジャイロ
102 ヨーレートジャイロ
103 GPS受信機
104 オフセット補正手段
105 オフセット除去手段
106 オフセット算出手段
107 走行判定手段
2 ナビゲーション装置
3 制御部
4 加速度センサ
5 記憶部
6 表示制御部
7 表示装置
8 スピーカ
【特許請求の範囲】
【請求項1】
車両の鉛直方向を軸とする回転を検出するヨーレートジャイロと、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記ピッチレートジャイロが検出した回転角から求めた角速度のうち前記ヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項2】
自車両の位置を算出するGPS受信機と、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記GPS受信機により算出された自車両の位置の変化から車両の上下方向を軸としたヨーレートの角速度を算出し、このヨーレートの角速度が所定の角速度A以下となっている期間における前記ピッチレートジャイロが検出した回転角から求めた角速度の所定時間Tの平均値を求め、この平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項3】
車両の鉛直方向を軸とする回転を検出するヨーレートジャイロと、自車両の位置を算出するGPS受信機と、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記ピッチレートジャイロが検出した回転角から求めた角速度のうち前記ヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求めて第1の平均値とし、前記GPS受信機により算出された自車両の位置の変化から車両の上下方向を軸としたヨーレートの角速度を算出しこのヨーレートの角速度が所定の角速度A以下となっている期間における前記ピッチレートジャイロが検出した回転角から求めた角速度の所定時間Tの平均値を求めて第2の平均値とし、前記第1および第2の平均値のいずれか1つの平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項4】
前記オフセット補正手段は、前記GPS受信機が算出した自車両の位置がトンネルまたは市街地である場合には、前記第1の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【請求項5】
前記オフセット補正手段は、自車両の速度が所定の値より速い場合には、前記第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【請求項6】
前記オフセット補正手段は、さらに、車両が停止中に前記ヨーレートジャイロのオフセット値を補正するものであり、所定時間以上車両が停止せずに走行した場合、前記第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【請求項1】
車両の鉛直方向を軸とする回転を検出するヨーレートジャイロと、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記ピッチレートジャイロが検出した回転角から求めた角速度のうち前記ヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求め、この平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項2】
自車両の位置を算出するGPS受信機と、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記GPS受信機により算出された自車両の位置の変化から車両の上下方向を軸としたヨーレートの角速度を算出し、このヨーレートの角速度が所定の角速度A以下となっている期間における前記ピッチレートジャイロが検出した回転角から求めた角速度の所定時間Tの平均値を求め、この平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項3】
車両の鉛直方向を軸とする回転を検出するヨーレートジャイロと、自車両の位置を算出するGPS受信機と、車両の左右方向を軸とした回転を検出するピッチレートジャイロと、車両が走行中に前記ピッチレートジャイロのオフセット補正を行うオフセット補正手段とを備えた車載用ジャイロのオフセット補正装置であって、
前記オフセット補正手段は、前記ピッチレートジャイロが検出した回転角から求めた角速度のうち前記ヨーレートジャイロが検出した回転角から求めた角速度が所定の角速度A以下となっている期間における角速度の所定時間Tの平均値を求めて第1の平均値とし、前記GPS受信機により算出された自車両の位置の変化から車両の上下方向を軸としたヨーレートの角速度を算出しこのヨーレートの角速度が所定の角速度A以下となっている期間における前記ピッチレートジャイロが検出した回転角から求めた角速度の所定時間Tの平均値を求めて第2の平均値とし、前記第1および第2の平均値のいずれか1つの平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする車載用ジャイロのオフセット補正装置。
【請求項4】
前記オフセット補正手段は、前記GPS受信機が算出した自車両の位置がトンネルまたは市街地である場合には、前記第1の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【請求項5】
前記オフセット補正手段は、自車両の速度が所定の値より速い場合には、前記第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【請求項6】
前記オフセット補正手段は、さらに、車両が停止中に前記ヨーレートジャイロのオフセット値を補正するものであり、所定時間以上車両が停止せずに走行した場合、前記第2の平均値を前記ピッチレートジャイロのオフセット値として補正を行うことを特徴とする請求項3に記載の車載用ジャイロのオフセット補正装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−191243(P2011−191243A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−59076(P2010−59076)
【出願日】平成22年3月16日(2010.3.16)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月16日(2010.3.16)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]