
車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステム
【課題】 見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる「車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステム」を提供すること。
【解決手段】 既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラ5によって撮影された画像が取得された場合に、この取得された画像が撮影された際における周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、見通しが良好な方の画像を優先して保存するための制御を行う制御手段3を備えたこと。
【解決手段】 既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラ5によって撮影された画像が取得された場合に、この取得された画像が撮影された際における周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、見通しが良好な方の画像を優先して保存するための制御を行う制御手段3を備えたこと。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムに係り、特に、車両に搭載されたカメラによって車両の走行地点において撮影された画像を保存するのに好適な車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムに関する。
【背景技術】
【0002】
従来から、車両事故の発生原因を解析するための装置として車載用ドライブレコーダが用いられていた。
【0003】
この車載用ドライブレコーダは、事故発生前後の車速、加速度、ハンドル舵角等の車両の走行状態を記録することによって、記録された走行状態を分析することができるようになっていた。
【0004】
また、近年では、車両の周辺を撮影するカメラを搭載し、このカメラによって撮影された事故発生前後の車両の周辺の画像を記録して保存することによって、事故発生時の走行状態をさらに詳細に解析することができる車載用ドライブレコーダも採用されるようになった。
【0005】
さらに、今後は、このような車載用ドライブレコーダに保存されたカメラの撮影画像を、ナビゲーション装置のデモ走行やルート案内に利用することが考えられる。
【0006】
ここで、デモ走行とは、設定されたルート上を自車両が実際に走行すると仮定した場合に、設定されたルート上の各走行地点において運転席から見えるであろう風景を表示部に表示することをいい、ユーザは、このデモ走行を利用することによって、出発前や休憩時において、予め目的地までの進行方法を画像によって把握することが可能となる。
【0007】
したがって、カメラの撮影画像をデモ走行に利用する場合には、設定されたルート上の仮想の(実際に走行していない)走行地点に対応する撮影画像が、デモ走行の進行すなわち仮想の走行地点の移動にともなってナビゲーション装置の表示部に順次表示されることになり、ユーザは、実写の画像によってより現実的なデモ走行を体験することができる。
【0008】
また、カメラの撮影画像をルート案内に利用する場合には、設定されたルート上を自車両が実際に走行する際に、ルート上の実際の走行地点に対応する撮影画像が、走行地点の移動にともなって表示部に順次表示されることになり、ユーザは、実写の画像によってより現実的なルート案内を受けることができる。
【0009】
【特許文献1】特開平09−14976号公報
【特許文献2】特開平09−35177号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、前述のように、カメラの撮影画像を保存する車載用ドライブレコーダにおいては、ある走行地点において撮影されたカメラの撮影画像を保存した後に、同一の走行地点において新たに撮影された撮影画像を入手する場合には、常に新たな撮影画像を保存し、既存の撮影画像を削除することが考えられる。
【0011】
しかしながら、新たな撮影画像が、周辺に多くの車両が存在して道路の見通しが悪い画像である場合もある。
【0012】
したがって、従来は、道路や右左折地点等を容易に把握することができる見通しが良好な画像を確実に保存することができない虞があった。
【0013】
そこで、本発明は、このような点に鑑みなされたものであり、見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0014】
前述した目的を達成するため、本発明に係る車載用ドライブレコーダの特徴は、車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダであって、前記画像を保存するための制御を行う制御手段を備え、この制御手段が、前記車両の走行地点において撮影された画像を保存する際に、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御とを行う制御手段を備えた点にある。
【0015】
そして、このような構成によれば、制御手段による制御により、同一の走行地点においてカメラによって撮影された画像(以下、「撮影画像」と称する)が得られた場合に、見通しが良好な方の画像を優先して保存することが可能となる。
【0016】
また、本発明に係る車載用ドライブレコーダの特徴は、制御手段が、見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行う点にある。
【0017】
そして、このような構成によれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することが可能となる。
【0018】
さらに、本発明に係る車載用ドライブレコーダの特徴は、2つの画像のうち、少なくとも、取得された画像が撮影された際に自車両の周辺に存在していた周辺車両の情報が、自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果である点にある。
【0019】
そして、このような構成によれば、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことが可能となる。
【0020】
さらにまた、本発明に係る車載用ドライブレコーダの特徴は、既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報である点にある。
【0021】
そして、このような構成によれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することが可能となる。
【0022】
また、本発明に係る車載用ドライブレコーダの特徴は、周辺車両検出手段が、レーダである点にある。
【0023】
そして、このような構成によれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することが可能となる。
【0024】
さらに、本発明に係る車載用ナビゲーションシステムの特徴は、車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダと、この車載用ドライブレコーダに保存された画像をデモ走行またはルート案内の際に表示することが可能とされた車載用ナビゲーション装置とを備えた車載用ナビゲーションシステムであって、前記車載用ドライブレコーダが、前記画像を保存するための制御を行う制御手段を備え、この制御手段が、前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御とを行う点にある。
【0025】
そして、このような構成によれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点においてカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することが可能となる。
【0026】
この結果、見通しが良好な画像を車載用ドライブレコーダに確実に保存することができ、この保存された見通しが良好な画像を用いてナビゲーション装置が適切なデモ走行やルート案内を行うことができる。
【0027】
さらにまた、本発明に係る車載用ナビゲーションシステムの特徴は、制御手段が、見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行う点にある。
【0028】
そして、このような構成によれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することが可能となる。
【0029】
また、本発明に係る車載用ナビゲーションシステムの特徴は、2つの画像のうち、少なくとも、取得された画像が撮影された際に自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果である点にある。
【0030】
そして、このような構成によれば、車載用ドライブレコーダが、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことが可能となる。
【0031】
さらに、本発明に係る車載用ナビゲーションシステムの特徴は、既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報である点にある。
【0032】
そして、このような構成によれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を、デモ走行またはルート案内の際に有効に活用することが可能となる。
【0033】
さらにまた、本発明に係る車載用ナビゲーションシステムの特徴は、周辺車両検出手段が、レーダである点にある。
【0034】
そして、このような構成によれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することが可能となる。
【発明の効果】
【0035】
本発明に係る車載用ドライブレコーダによれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することができる結果、見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる。
【0036】
また、本発明に係る車載用ドライブレコーダによれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することができる結果、さらに簡便な制御によって、見通しが良好な画像を確実に保存することができる。
【0037】
さらに、本発明に係る車載用ドライブレコーダによれば、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことができる結果、見通しが良好な画像をさらに確実に保存することができる。
【0038】
さらにまた、本発明に係る車載用ドライブレコーダによれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することができる結果、見通しが良好なより多くの画像をさらに効率的に保存することができ、ひいては、見通しが良好なより多くの画像を用いてさらに適切なデモ走行やルート案内を実現することができる。
【0039】
また、本発明に係る車載用ドライブレコーダによれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することができる結果、見通しが良好な画像をさらに簡便かつ確実に保存することができる。
【0040】
さらに、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することができる結果、見通しが良好な画像を車載用ドライブレコーダに確実に保存することができ、この保存された見通しが良好な画像を用いてナビゲーション装置が適切なデモ走行やルート案内を行うことができる。
【0041】
さらにまた、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することができる結果、さらに簡便な制御によって、見通しが良好な画像を確実に保存することができる。
【0042】
また、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことができる結果、見通しが良好な画像を車載用ドライブレコーダにさらに確実に保存することができ、この保存された画像を用いてナビゲーション装置がさらに適切なデモ走行やルート案内を行うことができる。
【0043】
さらに、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することができる結果、見通しが良好なより多くの画像を車載用ドライブレコーダに効率的に保存することができ、この保存された見通しが良好なより多くの画像を用いてナビゲーション装置がさらに適切なデモ走行やルート案内を行うことができる。
【0044】
さらにまた、本発明に係る車載用ナビゲーションシステムによれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することができる結果、見通しが良好な画像をさらに簡便かつ確実に保存することができる。
【発明を実施するための最良の形態】
【0045】
以下、本発明に係る車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムの実施形態について、図1乃至図5を参照して説明する。
【0046】
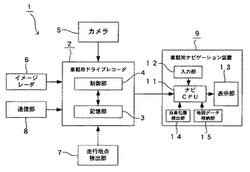
図1に示すように、本実施形態における車載用ナビゲーションシステム1は、車載用ドライブレコーダ2を有している。
【0047】
この車載用ドライブレコーダ2は、情報を保存可能とされた記憶部3と、この記憶部3による情報の保存を制御する制御手段としての制御部4とを有している。
【0048】
また、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続されたカメラ5を有しており、このカメラ5は、自車両の各走行地点において、道路、交差点、車両等の自車両の進行方向前方側における自車両周辺の画像を撮影し、撮影画像を車載用ドライブレコーダ2に出力するようになっている。
【0049】
車載用ドライブレコーダ2に出力されたカメラ5の撮影画像は、制御部4に一時的に保持された後に、制御部4による制御によって記憶部3に確定的に保存されるようになっている。
【0050】
なお、記憶部3は、例えばハードディスクドライブであってもよい。
【0051】
さらに、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された周辺車両検出手段としてのイメージレーダ6を有している。
【0052】
このイメージレーダ6は、カメラ5が自車両の周辺の画像を撮影する際に、自車両の周辺に存在する周辺車両の情報(以下、「周辺車両情報」と称する)を検出し、検出結果を車載用ドライブレコーダ2に出力するようになっている。
【0053】
そして、本実施形態において、制御部4は、カメラ5の撮影画像を記憶部3に保存する際に、この撮影画像が撮影された際にイメージレーダ6によって検出された周辺車両情報を、当該撮影画像の付加情報として当該撮影画像に関連づけて保存するための制御を行うようになっている。
【0054】
これにより、記憶部3には、カメラ5の撮影画像と、この撮影画像が撮影された際における周辺車両情報とが互いに関連づけて保存されるようになっている。
【0055】
なお、周辺車両情報は、少なくとも周辺車両の数を把握することができる情報であればよいが、周辺車両の数に加えて、例えば、前方車両の車高や車幅等の他の情報を把握することができる情報であってもよい。
【0056】
また、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された走行地点検出部7を有しており、この走行地点検出部7は、カメラ5の撮影画像が撮影された際における自車両の走行地点を検出し、検出結果を車載用ドライブレコーダ2に出力するようになっている。
【0057】
なお、走行地点検出部7は、例えば、GPSレシーバであってもよいし、または、車速センサやジャイロセンサ等の各種センサを適宜組み合わせたものであってもよいし、あるいは、GPSレシーバおよび各種センサの双方を備えたものであってもよい。
【0058】
そして、制御部4は、カメラ5の撮影画像を記憶部3に保存する際に、この撮影画像が撮影された際に走行地点検出部7によって検出された自車両の走行地点を、当該撮影画像の付加情報として当該撮影画像と関連づけて保存するための制御を行うようになっている。
【0059】
これにより、記憶部3には、カメラ5の撮影画像と、この撮影画像が撮影された際における自車両の走行地点とが互いに関連づけて保存されるようになっている。
【0060】
さらに、本実施形態において、制御部4は、既に記憶部3に保存されている撮影画像(以下、「既保存画像」と称する)が撮影された走行地点と同一の走行地点(換言すれば、同一の撮影位置)において、自車両に搭載されたカメラ5の撮影画像(以下、「新規取得画像」と称する)が取得された場合に、以下の制御を行うようになっている。
【0061】
すなわち、まず、制御部4は、既保存画像が撮影された走行地点と同一の走行地点において撮影された新規取得画像が取得された場合、まず、新規取得画像が撮影された際における周辺車両情報(付加情報)と、既保存画像が撮影された際における周辺車両情報(付加情報)とを比較するようになっている。
【0062】
なお、既保存画像と新規取得画像とが同一の走行地点において撮影された画像であるか否かについては、例えば、前述した各画像と関連づけて保存された自車両の走行地点の情報に基づいて判断することができる。
【0063】
次に、制御部4は、前記比較に基づいて、既保存画像と、新規取得画像との2つの撮影画像のうち、見通しが良好な方の画像として、周辺車両の数が少ない方の撮影画像を優先して保存するための制御を行うようになっている。
【0064】
この制御により、記憶部3には、同一の走行地点におけるカメラ5の撮影画像が得られた場合に、周辺車両の数が少ない方の撮影画像が優先して保存されるようになっている。
【0065】
一方、周辺車両の数が多い方の撮影画像については、制御部4による制御によって、新規取得画像の場合には破棄され、既保存画像の場合には記憶部3から削除されるようになっている。
【0066】
この結果、制御部4による簡便な制御によって、見通しが良好な撮影画像を確実に保存することができる。
【0067】
なお、既保存画像および新規取得画像のうち、いずれの撮影画像の見通しが良好であるかを判断するには、周辺車両の数だけでなく、例えば、前方車両の車高や車幅等の他の周辺車両情報を参照するようにしてもよい。
【0068】
そのようにすれば、周辺車両の数が同じ場合であっても、例えば、前方車両の車高や車幅が小さい方の撮影画像を見通しが良好な撮影画像と判断することが可能となる。
【0069】
さらに、本実施形態においては、既保存画像が、他車両に搭載されたカメラによって撮影された画像である場合がある。
【0070】
すなわち、図1に示すように、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された通信部8を有している。
【0071】
そして、車載用ドライブレコーダ2は、この通信部8による車々間通信によって、他車両のカメラの撮影画像と、当該画像が撮影された際における他車両の周辺車両情報とを取得することが可能とされている。
【0072】
これにより、他車両のカメラの撮影画像を既保存画像として有効に活用することができるとともに、この既保存画像が撮影された際における他車両の周辺車両情報を、制御部4による前記比較の際に有効に活用することができる。
【0073】
なお、この場合、既保存画像が撮影された際における周辺車両情報は、自車両のイメージレーダ6によって検出された周辺車両情報ではなく、車々間通信によって得られた周辺車両情報となる。
【0074】
したがって、このような車々間通信を利用する場合には、本実施形態における車載用ナビゲーションシステム1を、他車両も搭載していることが必要となる。
【0075】
他車両に車載用ナビゲーションシステム1を搭載する場合、他車両側の車載用ナビゲーションシステム1においても、自車両側の車載用ドライブレコーダ2に保存された撮影画像および周辺車両情報を、車々間通信によって活用することができることについては言うまでもない。
【0076】
さらに、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された車載用ナビゲーション装置9を有している。
【0077】
車載用ナビゲーション装置9は、ナビCPU11を有しており、このナビCPU11は、車載用ドライブレコーダ2に保存された撮影画像を読み込み可能とされている。
【0078】
ナビCPU11には、リモコンや表示部13のタッチパネル等の入力部12が接続されており、この入力部12を介して、希望する目的地等の入力情報を設定することができるようになっている。
【0079】
ナビCPU11は、入力情報に基づいて目的地までのルート計算を行い、このルート計算によって算出されたルートに沿ったデモ走行やルート案内を実行するようになっている。
【0080】
ナビCPU11には、表示部13が接続されており、この表示部13には、デモ走行やルート案内の際に、車載用ドライブレコーダ2から読み込まれた撮影画像が、ナビCPU11による制御によって適宜表示されるようになっている。
【0081】
また、ナビCPU11には、地図データが格納された地図データ格納部15が接続されている。ナビCPU11は、ルート案内の際に、必要に応じて地図データ格納部15に格納された地図データを読み込んで、表示部13に地図表示を行うようになっている。
【0082】
さらに、ナビCPU11には、車両の現在位置(自車位置)を検出する自車位置検出部14が接続されており、この自車位置検出部14の検出結果は、ルート案内や地図表示の際に適宜利用されるようになっている。
【0083】
自車位置検出部14は、走行地点検出部7と同様に、例えば、GPSレシーバであってもよいし、または、車速センサやジャイロセンサ等の各種センサを適宜組み合わせたものであってもよいし、あるいは、GPSレシーバおよび各種センサの双方を備えたものであってもよい。
【0084】
このようなナビゲーション装置9によってデモ走行を実行する際には、入力部12を介して設定された目的地までのルートを、ナビCPU11によるルート計算によって算出する。
【0085】
そして、ナビCPU11により、前記算出されたルート上の仮想の走行地点に対応するカメラ5の撮影画像を、デモ走行の進行すなわち前記仮想の走行地点の移動にともなって車載用ドライブレコーダ2から順次読み込んで表示部13に表示する。
【0086】
このとき、車載用ドライブレコーダ2には、周辺車両の数が少ない見通しが良好なカメラ5の撮影画像が優先して保存されているため、表示部13には、見通しが良好な実写画像が表示されることになる。
【0087】
また、このとき、車載用ドライブレコーダ2には、カメラ5の撮影画像が、当該撮影画像を撮影した際における車両の走行地点と関連づけて保存されているため、仮想の走行地点に対応する撮影画像を、車載用ドライブレコーダ2から適切に読み込んで表示部13に表示することができる。
【0088】
これにより、ユーザは、予め目的地までの進行方法を見通しが良好な実写画像によって確実に把握することができる。
【0089】
なお、デモ走行の進行速度等は、ユーザが入力部12を介して自由に変更することができるようにしてもよい。
【0090】
また、ナビゲーション装置9によってルート案内を実行する際には、ナビCPU11により、入力部12を介して設定された目的地までのルートを算出し、この算出したルート上を自車両が実際に走行する際に、このルート上の実際の走行地点(例えば、交差点等)に対応するカメラ5の撮影画像を、走行地点の移動にともなって車載用ドライブレコーダ2から順次読み込んで表示部13に表示することになる。
【0091】
このとき、車載用ドライブレコーダ2には、カメラ5の撮影画像が、当該撮影画像を撮影した際における車両の走行地点と関連づけて保存されているため、実際の走行地点に対応する撮影画像を、車載用ドライブレコーダ2から適切に読み込んで表示部13に表示することができる。
【0092】
これにより、ユーザは、見通しが良好な実写画像を参照して現在の自車両の走行が適切であるか否かを容易に確認することができる。
【0093】
なお、ルート案内の際における自車両の実際の走行地点は、自車位置検出部14によって自車位置として検出することができる。
【0094】
次に、本実施形態の作用として、車載用ドライブレコーダ2によって行われる一連の処理について、図2乃至図5を参照して説明する。
【0095】
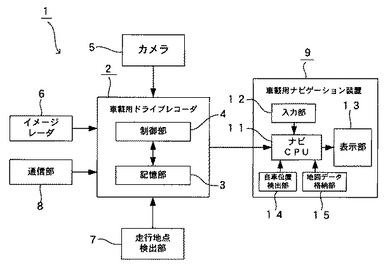
本実施形態においては、車載用ドライブレコーダ2の処理を開始した後、まず、図2のステップ1(ST1)に示すように、制御部4により、図3に示すような新規取得画像と、この新規取得画像が撮影された際における自車両の周辺車両情報とを取得した後に、ステップ2(ST2)に進む。
【0096】
なお、図3に示す新規取得画像は、周辺車両が存在しない見通しが最も良好な画像となっている。
【0097】
次いで、ステップ2(ST2)においては、制御部4により、ステップ1(ST1)において取得された新規取得画像と同一の走行地点において撮影された既保存画像が記憶部3に保存されているか否かを判定する。
【0098】
そして、そのような既保存画像が保存されている場合には、ステップ3(ST3)に進み、保存されていない場合には、ステップ5(ST5)に進む。
【0099】
ステップ5(ST5)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像と、この新規取得画像が撮影された際における周辺車両情報とを互いに関連付けた状態で記憶部3に保存する。
【0100】
一方、ステップ3(ST3)においては、制御部4により、ステップ1(ST1)において取得された新規取得画像が撮影された際における周辺車両の数が、既保存画像が撮影された際における周辺車両の数よりも少ないか否かを、周辺車両情報に基づいて判定する。
【0101】
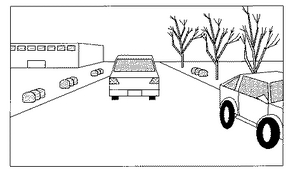
そして、例えば、既保存画像が図4に示す場合のように、ステップ1(ST1)において取得された新規取得画像が撮影された際における周辺車両の数が、既保存画像が撮影された際における周辺車両の数よりも少ない場合には、ステップ4(ST4)に進み、そうでない場合には、ステップ6(ST6)に進む。
【0102】
なお、図4に示す既保存画像においては、前方車両および対向車両が一台ずつ存在しており、周辺車両の数が図3に示す新規取得画像よりも多くなっている。
【0103】
次いで、ステップ6(ST6)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像およびこの新規取得画像が撮影された際における周辺車両情報を破棄する。
【0104】
この場合、既保存画像が新規取得画像に優先して保存されることになり、既保存画像の保存が継続されることになる。
【0105】
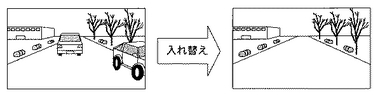
一方、ステップ4(ST4)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像が既保存画像に優先して保存されることになり、図5に示すように、記憶部3には、既保存画像に入れ替わって新規取得画像が保存され、既保存画像は記憶部3から削除される。
【0106】
このとき、記憶部3には、新規取得画像とともに、新規取得画像が撮影された際における自車両の周辺車両情報が、新規取得画像と互いに関連づけて保存される。
【0107】
以上述べたように、本実施形態によれば、制御部4による制御により、同一の走行地点(撮影位置)におけるカメラ5の撮影画像が得られた場合に、見通しが良好な方の撮影画像を優先して保存することができる。
【0108】
この結果、見通しが良好な撮影画像を車載用ドライブレコーダ2に確実に保存することができ、ナビゲーション装置9が、車載用ドライブレコーダ2に保存された見通しが良好な実写画像を用いてデモ走行やルート案内を適切に行うことができる。
【0109】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0110】
例えば、周辺車両検出手段として、イメージレーダ6以外のレーダあるいはレーダ以外の手段を用いるようにしてもよい。例えば、前述した制御部4による画像認識によって、カメラの撮影画像から周辺車両情報を直接取得することができるのであれば、制御部4を周辺車両検出手段として用いるようにしてもよい。
【図面の簡単な説明】
【0111】
【図1】本発明に係る車載用ドライブレコーダおよびこれを備えたナビゲーションシステムの実施形態を示すブロック図
【図2】本発明に係る車載用ドライブレコーダの実施形態を示すフローチャート
【図3】本発明に係る車載用ドライブレコーダの実施形態において、新規取得画像の一例を模式的に示す図
【図4】本発明に係る車載用ドライブレコーダの実施形態において、既保存画像の一例を模式的に示す図
【図5】本発明に係る車載用ドライブレコーダの実施形態において、記憶部に保存される撮影画像の入れ替わりを示す説明図
【符号の説明】
【0112】
1 車載用ナビゲーションシステム
2 車載用ドライブレコーダ
3 記憶部
4 制御部
5 カメラ
6 イメージレーダ
9 ナビゲーション装置
【技術分野】
【0001】
本発明は、車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムに係り、特に、車両に搭載されたカメラによって車両の走行地点において撮影された画像を保存するのに好適な車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムに関する。
【背景技術】
【0002】
従来から、車両事故の発生原因を解析するための装置として車載用ドライブレコーダが用いられていた。
【0003】
この車載用ドライブレコーダは、事故発生前後の車速、加速度、ハンドル舵角等の車両の走行状態を記録することによって、記録された走行状態を分析することができるようになっていた。
【0004】
また、近年では、車両の周辺を撮影するカメラを搭載し、このカメラによって撮影された事故発生前後の車両の周辺の画像を記録して保存することによって、事故発生時の走行状態をさらに詳細に解析することができる車載用ドライブレコーダも採用されるようになった。
【0005】
さらに、今後は、このような車載用ドライブレコーダに保存されたカメラの撮影画像を、ナビゲーション装置のデモ走行やルート案内に利用することが考えられる。
【0006】
ここで、デモ走行とは、設定されたルート上を自車両が実際に走行すると仮定した場合に、設定されたルート上の各走行地点において運転席から見えるであろう風景を表示部に表示することをいい、ユーザは、このデモ走行を利用することによって、出発前や休憩時において、予め目的地までの進行方法を画像によって把握することが可能となる。
【0007】
したがって、カメラの撮影画像をデモ走行に利用する場合には、設定されたルート上の仮想の(実際に走行していない)走行地点に対応する撮影画像が、デモ走行の進行すなわち仮想の走行地点の移動にともなってナビゲーション装置の表示部に順次表示されることになり、ユーザは、実写の画像によってより現実的なデモ走行を体験することができる。
【0008】
また、カメラの撮影画像をルート案内に利用する場合には、設定されたルート上を自車両が実際に走行する際に、ルート上の実際の走行地点に対応する撮影画像が、走行地点の移動にともなって表示部に順次表示されることになり、ユーザは、実写の画像によってより現実的なルート案内を受けることができる。
【0009】
【特許文献1】特開平09−14976号公報
【特許文献2】特開平09−35177号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、前述のように、カメラの撮影画像を保存する車載用ドライブレコーダにおいては、ある走行地点において撮影されたカメラの撮影画像を保存した後に、同一の走行地点において新たに撮影された撮影画像を入手する場合には、常に新たな撮影画像を保存し、既存の撮影画像を削除することが考えられる。
【0011】
しかしながら、新たな撮影画像が、周辺に多くの車両が存在して道路の見通しが悪い画像である場合もある。
【0012】
したがって、従来は、道路や右左折地点等を容易に把握することができる見通しが良好な画像を確実に保存することができない虞があった。
【0013】
そこで、本発明は、このような点に鑑みなされたものであり、見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムを提供することを目的とするものである。
【課題を解決するための手段】
【0014】
前述した目的を達成するため、本発明に係る車載用ドライブレコーダの特徴は、車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダであって、前記画像を保存するための制御を行う制御手段を備え、この制御手段が、前記車両の走行地点において撮影された画像を保存する際に、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御とを行う制御手段を備えた点にある。
【0015】
そして、このような構成によれば、制御手段による制御により、同一の走行地点においてカメラによって撮影された画像(以下、「撮影画像」と称する)が得られた場合に、見通しが良好な方の画像を優先して保存することが可能となる。
【0016】
また、本発明に係る車載用ドライブレコーダの特徴は、制御手段が、見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行う点にある。
【0017】
そして、このような構成によれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することが可能となる。
【0018】
さらに、本発明に係る車載用ドライブレコーダの特徴は、2つの画像のうち、少なくとも、取得された画像が撮影された際に自車両の周辺に存在していた周辺車両の情報が、自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果である点にある。
【0019】
そして、このような構成によれば、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことが可能となる。
【0020】
さらにまた、本発明に係る車載用ドライブレコーダの特徴は、既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報である点にある。
【0021】
そして、このような構成によれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することが可能となる。
【0022】
また、本発明に係る車載用ドライブレコーダの特徴は、周辺車両検出手段が、レーダである点にある。
【0023】
そして、このような構成によれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することが可能となる。
【0024】
さらに、本発明に係る車載用ナビゲーションシステムの特徴は、車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダと、この車載用ドライブレコーダに保存された画像をデモ走行またはルート案内の際に表示することが可能とされた車載用ナビゲーション装置とを備えた車載用ナビゲーションシステムであって、前記車載用ドライブレコーダが、前記画像を保存するための制御を行う制御手段を備え、この制御手段が、前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御とを行う点にある。
【0025】
そして、このような構成によれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点においてカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することが可能となる。
【0026】
この結果、見通しが良好な画像を車載用ドライブレコーダに確実に保存することができ、この保存された見通しが良好な画像を用いてナビゲーション装置が適切なデモ走行やルート案内を行うことができる。
【0027】
さらにまた、本発明に係る車載用ナビゲーションシステムの特徴は、制御手段が、見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行う点にある。
【0028】
そして、このような構成によれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することが可能となる。
【0029】
また、本発明に係る車載用ナビゲーションシステムの特徴は、2つの画像のうち、少なくとも、取得された画像が撮影された際に自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果である点にある。
【0030】
そして、このような構成によれば、車載用ドライブレコーダが、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことが可能となる。
【0031】
さらに、本発明に係る車載用ナビゲーションシステムの特徴は、既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報である点にある。
【0032】
そして、このような構成によれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を、デモ走行またはルート案内の際に有効に活用することが可能となる。
【0033】
さらにまた、本発明に係る車載用ナビゲーションシステムの特徴は、周辺車両検出手段が、レーダである点にある。
【0034】
そして、このような構成によれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することが可能となる。
【発明の効果】
【0035】
本発明に係る車載用ドライブレコーダによれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することができる結果、見通しが良好な画像を確実に保存することができ、ひいては、保存された見通しが良好な画像を用いて適切なデモ走行やルート案内を実現することができる。
【0036】
また、本発明に係る車載用ドライブレコーダによれば、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することができる結果、さらに簡便な制御によって、見通しが良好な画像を確実に保存することができる。
【0037】
さらに、本発明に係る車載用ドライブレコーダによれば、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことができる結果、見通しが良好な画像をさらに確実に保存することができる。
【0038】
さらにまた、本発明に係る車載用ドライブレコーダによれば、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することができる結果、見通しが良好なより多くの画像をさらに効率的に保存することができ、ひいては、見通しが良好なより多くの画像を用いてさらに適切なデモ走行やルート案内を実現することができる。
【0039】
また、本発明に係る車載用ドライブレコーダによれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することができる結果、見通しが良好な画像をさらに簡便かつ確実に保存することができる。
【0040】
さらに、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、見通しが良好な方の画像を優先して保存することができる結果、見通しが良好な画像を車載用ドライブレコーダに確実に保存することができ、この保存された見通しが良好な画像を用いてナビゲーション装置が適切なデモ走行やルート案内を行うことができる。
【0041】
さらにまた、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、制御手段による制御により、同一の走行地点におけるカメラの撮影画像が得られた場合に、周辺車両の数が少ない方の画像を優先して保存することができる結果、さらに簡便な制御によって、見通しが良好な画像を確実に保存することができる。
【0042】
また、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、周辺車両検出手段の検出結果に基づいて、制御手段による制御を行うことができる結果、見通しが良好な画像を車載用ドライブレコーダにさらに確実に保存することができ、この保存された画像を用いてナビゲーション装置がさらに適切なデモ走行やルート案内を行うことができる。
【0043】
さらに、本発明に係る車載用ナビゲーションシステムによれば、車載用ドライブレコーダが、他車両に搭載されたカメラの撮影画像およびこの画像が撮影された際に他車両の周辺に存在していた周辺車両の情報を、車々間通信等によって取得して保存することによって、他車両に搭載されたカメラの撮影画像および当該画像が撮影された際における他車両の周辺車両の情報を有効に活用することができる結果、見通しが良好なより多くの画像を車載用ドライブレコーダに効率的に保存することができ、この保存された見通しが良好なより多くの画像を用いてナビゲーション装置がさらに適切なデモ走行やルート案内を行うことができる。
【0044】
さらにまた、本発明に係る車載用ナビゲーションシステムによれば、レーダによって、周辺車両の情報を簡便かつ確実に検出することができる結果、見通しが良好な画像をさらに簡便かつ確実に保存することができる。
【発明を実施するための最良の形態】
【0045】
以下、本発明に係る車載用ドライブレコーダおよびこれを備えた車載用ナビゲーションシステムの実施形態について、図1乃至図5を参照して説明する。
【0046】
図1に示すように、本実施形態における車載用ナビゲーションシステム1は、車載用ドライブレコーダ2を有している。
【0047】
この車載用ドライブレコーダ2は、情報を保存可能とされた記憶部3と、この記憶部3による情報の保存を制御する制御手段としての制御部4とを有している。
【0048】
また、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続されたカメラ5を有しており、このカメラ5は、自車両の各走行地点において、道路、交差点、車両等の自車両の進行方向前方側における自車両周辺の画像を撮影し、撮影画像を車載用ドライブレコーダ2に出力するようになっている。
【0049】
車載用ドライブレコーダ2に出力されたカメラ5の撮影画像は、制御部4に一時的に保持された後に、制御部4による制御によって記憶部3に確定的に保存されるようになっている。
【0050】
なお、記憶部3は、例えばハードディスクドライブであってもよい。
【0051】
さらに、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された周辺車両検出手段としてのイメージレーダ6を有している。
【0052】
このイメージレーダ6は、カメラ5が自車両の周辺の画像を撮影する際に、自車両の周辺に存在する周辺車両の情報(以下、「周辺車両情報」と称する)を検出し、検出結果を車載用ドライブレコーダ2に出力するようになっている。
【0053】
そして、本実施形態において、制御部4は、カメラ5の撮影画像を記憶部3に保存する際に、この撮影画像が撮影された際にイメージレーダ6によって検出された周辺車両情報を、当該撮影画像の付加情報として当該撮影画像に関連づけて保存するための制御を行うようになっている。
【0054】
これにより、記憶部3には、カメラ5の撮影画像と、この撮影画像が撮影された際における周辺車両情報とが互いに関連づけて保存されるようになっている。
【0055】
なお、周辺車両情報は、少なくとも周辺車両の数を把握することができる情報であればよいが、周辺車両の数に加えて、例えば、前方車両の車高や車幅等の他の情報を把握することができる情報であってもよい。
【0056】
また、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された走行地点検出部7を有しており、この走行地点検出部7は、カメラ5の撮影画像が撮影された際における自車両の走行地点を検出し、検出結果を車載用ドライブレコーダ2に出力するようになっている。
【0057】
なお、走行地点検出部7は、例えば、GPSレシーバであってもよいし、または、車速センサやジャイロセンサ等の各種センサを適宜組み合わせたものであってもよいし、あるいは、GPSレシーバおよび各種センサの双方を備えたものであってもよい。
【0058】
そして、制御部4は、カメラ5の撮影画像を記憶部3に保存する際に、この撮影画像が撮影された際に走行地点検出部7によって検出された自車両の走行地点を、当該撮影画像の付加情報として当該撮影画像と関連づけて保存するための制御を行うようになっている。
【0059】
これにより、記憶部3には、カメラ5の撮影画像と、この撮影画像が撮影された際における自車両の走行地点とが互いに関連づけて保存されるようになっている。
【0060】
さらに、本実施形態において、制御部4は、既に記憶部3に保存されている撮影画像(以下、「既保存画像」と称する)が撮影された走行地点と同一の走行地点(換言すれば、同一の撮影位置)において、自車両に搭載されたカメラ5の撮影画像(以下、「新規取得画像」と称する)が取得された場合に、以下の制御を行うようになっている。
【0061】
すなわち、まず、制御部4は、既保存画像が撮影された走行地点と同一の走行地点において撮影された新規取得画像が取得された場合、まず、新規取得画像が撮影された際における周辺車両情報(付加情報)と、既保存画像が撮影された際における周辺車両情報(付加情報)とを比較するようになっている。
【0062】
なお、既保存画像と新規取得画像とが同一の走行地点において撮影された画像であるか否かについては、例えば、前述した各画像と関連づけて保存された自車両の走行地点の情報に基づいて判断することができる。
【0063】
次に、制御部4は、前記比較に基づいて、既保存画像と、新規取得画像との2つの撮影画像のうち、見通しが良好な方の画像として、周辺車両の数が少ない方の撮影画像を優先して保存するための制御を行うようになっている。
【0064】
この制御により、記憶部3には、同一の走行地点におけるカメラ5の撮影画像が得られた場合に、周辺車両の数が少ない方の撮影画像が優先して保存されるようになっている。
【0065】
一方、周辺車両の数が多い方の撮影画像については、制御部4による制御によって、新規取得画像の場合には破棄され、既保存画像の場合には記憶部3から削除されるようになっている。
【0066】
この結果、制御部4による簡便な制御によって、見通しが良好な撮影画像を確実に保存することができる。
【0067】
なお、既保存画像および新規取得画像のうち、いずれの撮影画像の見通しが良好であるかを判断するには、周辺車両の数だけでなく、例えば、前方車両の車高や車幅等の他の周辺車両情報を参照するようにしてもよい。
【0068】
そのようにすれば、周辺車両の数が同じ場合であっても、例えば、前方車両の車高や車幅が小さい方の撮影画像を見通しが良好な撮影画像と判断することが可能となる。
【0069】
さらに、本実施形態においては、既保存画像が、他車両に搭載されたカメラによって撮影された画像である場合がある。
【0070】
すなわち、図1に示すように、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された通信部8を有している。
【0071】
そして、車載用ドライブレコーダ2は、この通信部8による車々間通信によって、他車両のカメラの撮影画像と、当該画像が撮影された際における他車両の周辺車両情報とを取得することが可能とされている。
【0072】
これにより、他車両のカメラの撮影画像を既保存画像として有効に活用することができるとともに、この既保存画像が撮影された際における他車両の周辺車両情報を、制御部4による前記比較の際に有効に活用することができる。
【0073】
なお、この場合、既保存画像が撮影された際における周辺車両情報は、自車両のイメージレーダ6によって検出された周辺車両情報ではなく、車々間通信によって得られた周辺車両情報となる。
【0074】
したがって、このような車々間通信を利用する場合には、本実施形態における車載用ナビゲーションシステム1を、他車両も搭載していることが必要となる。
【0075】
他車両に車載用ナビゲーションシステム1を搭載する場合、他車両側の車載用ナビゲーションシステム1においても、自車両側の車載用ドライブレコーダ2に保存された撮影画像および周辺車両情報を、車々間通信によって活用することができることについては言うまでもない。
【0076】
さらに、車載用ナビゲーションシステム1は、車載用ドライブレコーダ2に接続された車載用ナビゲーション装置9を有している。
【0077】
車載用ナビゲーション装置9は、ナビCPU11を有しており、このナビCPU11は、車載用ドライブレコーダ2に保存された撮影画像を読み込み可能とされている。
【0078】
ナビCPU11には、リモコンや表示部13のタッチパネル等の入力部12が接続されており、この入力部12を介して、希望する目的地等の入力情報を設定することができるようになっている。
【0079】
ナビCPU11は、入力情報に基づいて目的地までのルート計算を行い、このルート計算によって算出されたルートに沿ったデモ走行やルート案内を実行するようになっている。
【0080】
ナビCPU11には、表示部13が接続されており、この表示部13には、デモ走行やルート案内の際に、車載用ドライブレコーダ2から読み込まれた撮影画像が、ナビCPU11による制御によって適宜表示されるようになっている。
【0081】
また、ナビCPU11には、地図データが格納された地図データ格納部15が接続されている。ナビCPU11は、ルート案内の際に、必要に応じて地図データ格納部15に格納された地図データを読み込んで、表示部13に地図表示を行うようになっている。
【0082】
さらに、ナビCPU11には、車両の現在位置(自車位置)を検出する自車位置検出部14が接続されており、この自車位置検出部14の検出結果は、ルート案内や地図表示の際に適宜利用されるようになっている。
【0083】
自車位置検出部14は、走行地点検出部7と同様に、例えば、GPSレシーバであってもよいし、または、車速センサやジャイロセンサ等の各種センサを適宜組み合わせたものであってもよいし、あるいは、GPSレシーバおよび各種センサの双方を備えたものであってもよい。
【0084】
このようなナビゲーション装置9によってデモ走行を実行する際には、入力部12を介して設定された目的地までのルートを、ナビCPU11によるルート計算によって算出する。
【0085】
そして、ナビCPU11により、前記算出されたルート上の仮想の走行地点に対応するカメラ5の撮影画像を、デモ走行の進行すなわち前記仮想の走行地点の移動にともなって車載用ドライブレコーダ2から順次読み込んで表示部13に表示する。
【0086】
このとき、車載用ドライブレコーダ2には、周辺車両の数が少ない見通しが良好なカメラ5の撮影画像が優先して保存されているため、表示部13には、見通しが良好な実写画像が表示されることになる。
【0087】
また、このとき、車載用ドライブレコーダ2には、カメラ5の撮影画像が、当該撮影画像を撮影した際における車両の走行地点と関連づけて保存されているため、仮想の走行地点に対応する撮影画像を、車載用ドライブレコーダ2から適切に読み込んで表示部13に表示することができる。
【0088】
これにより、ユーザは、予め目的地までの進行方法を見通しが良好な実写画像によって確実に把握することができる。
【0089】
なお、デモ走行の進行速度等は、ユーザが入力部12を介して自由に変更することができるようにしてもよい。
【0090】
また、ナビゲーション装置9によってルート案内を実行する際には、ナビCPU11により、入力部12を介して設定された目的地までのルートを算出し、この算出したルート上を自車両が実際に走行する際に、このルート上の実際の走行地点(例えば、交差点等)に対応するカメラ5の撮影画像を、走行地点の移動にともなって車載用ドライブレコーダ2から順次読み込んで表示部13に表示することになる。
【0091】
このとき、車載用ドライブレコーダ2には、カメラ5の撮影画像が、当該撮影画像を撮影した際における車両の走行地点と関連づけて保存されているため、実際の走行地点に対応する撮影画像を、車載用ドライブレコーダ2から適切に読み込んで表示部13に表示することができる。
【0092】
これにより、ユーザは、見通しが良好な実写画像を参照して現在の自車両の走行が適切であるか否かを容易に確認することができる。
【0093】
なお、ルート案内の際における自車両の実際の走行地点は、自車位置検出部14によって自車位置として検出することができる。
【0094】
次に、本実施形態の作用として、車載用ドライブレコーダ2によって行われる一連の処理について、図2乃至図5を参照して説明する。
【0095】
本実施形態においては、車載用ドライブレコーダ2の処理を開始した後、まず、図2のステップ1(ST1)に示すように、制御部4により、図3に示すような新規取得画像と、この新規取得画像が撮影された際における自車両の周辺車両情報とを取得した後に、ステップ2(ST2)に進む。
【0096】
なお、図3に示す新規取得画像は、周辺車両が存在しない見通しが最も良好な画像となっている。
【0097】
次いで、ステップ2(ST2)においては、制御部4により、ステップ1(ST1)において取得された新規取得画像と同一の走行地点において撮影された既保存画像が記憶部3に保存されているか否かを判定する。
【0098】
そして、そのような既保存画像が保存されている場合には、ステップ3(ST3)に進み、保存されていない場合には、ステップ5(ST5)に進む。
【0099】
ステップ5(ST5)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像と、この新規取得画像が撮影された際における周辺車両情報とを互いに関連付けた状態で記憶部3に保存する。
【0100】
一方、ステップ3(ST3)においては、制御部4により、ステップ1(ST1)において取得された新規取得画像が撮影された際における周辺車両の数が、既保存画像が撮影された際における周辺車両の数よりも少ないか否かを、周辺車両情報に基づいて判定する。
【0101】
そして、例えば、既保存画像が図4に示す場合のように、ステップ1(ST1)において取得された新規取得画像が撮影された際における周辺車両の数が、既保存画像が撮影された際における周辺車両の数よりも少ない場合には、ステップ4(ST4)に進み、そうでない場合には、ステップ6(ST6)に進む。
【0102】
なお、図4に示す既保存画像においては、前方車両および対向車両が一台ずつ存在しており、周辺車両の数が図3に示す新規取得画像よりも多くなっている。
【0103】
次いで、ステップ6(ST6)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像およびこの新規取得画像が撮影された際における周辺車両情報を破棄する。
【0104】
この場合、既保存画像が新規取得画像に優先して保存されることになり、既保存画像の保存が継続されることになる。
【0105】
一方、ステップ4(ST4)においては、制御部4による制御により、ステップ1(ST1)において取得された新規取得画像が既保存画像に優先して保存されることになり、図5に示すように、記憶部3には、既保存画像に入れ替わって新規取得画像が保存され、既保存画像は記憶部3から削除される。
【0106】
このとき、記憶部3には、新規取得画像とともに、新規取得画像が撮影された際における自車両の周辺車両情報が、新規取得画像と互いに関連づけて保存される。
【0107】
以上述べたように、本実施形態によれば、制御部4による制御により、同一の走行地点(撮影位置)におけるカメラ5の撮影画像が得られた場合に、見通しが良好な方の撮影画像を優先して保存することができる。
【0108】
この結果、見通しが良好な撮影画像を車載用ドライブレコーダ2に確実に保存することができ、ナビゲーション装置9が、車載用ドライブレコーダ2に保存された見通しが良好な実写画像を用いてデモ走行やルート案内を適切に行うことができる。
【0109】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じて種々の変更が可能である。
【0110】
例えば、周辺車両検出手段として、イメージレーダ6以外のレーダあるいはレーダ以外の手段を用いるようにしてもよい。例えば、前述した制御部4による画像認識によって、カメラの撮影画像から周辺車両情報を直接取得することができるのであれば、制御部4を周辺車両検出手段として用いるようにしてもよい。
【図面の簡単な説明】
【0111】
【図1】本発明に係る車載用ドライブレコーダおよびこれを備えたナビゲーションシステムの実施形態を示すブロック図
【図2】本発明に係る車載用ドライブレコーダの実施形態を示すフローチャート
【図3】本発明に係る車載用ドライブレコーダの実施形態において、新規取得画像の一例を模式的に示す図
【図4】本発明に係る車載用ドライブレコーダの実施形態において、既保存画像の一例を模式的に示す図
【図5】本発明に係る車載用ドライブレコーダの実施形態において、記憶部に保存される撮影画像の入れ替わりを示す説明図
【符号の説明】
【0112】
1 車載用ナビゲーションシステム
2 車載用ドライブレコーダ
3 記憶部
4 制御部
5 カメラ
6 イメージレーダ
9 ナビゲーション装置
【特許請求の範囲】
【請求項1】
車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダであって、
前記画像を保存するための制御を行う制御手段を備え、
この制御手段は、
前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、
既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御と
を行うことを特徴とする車載用ドライブレコーダ。
【請求項2】
前記制御手段が、前記見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行うことを特徴とする請求項1に記載の車載用ドライブレコーダ。
【請求項3】
前記2つの画像のうち、少なくとも、前記取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果であることを特徴とする請求項1または請求項2に記載の車載用ドライブレコーダ。
【請求項4】
前記既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、
前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報であること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の車載用ドライブレコーダ。
【請求項5】
前記周辺車両検出手段が、レーダであることを特徴とする請求項3または請求項4に記載の車載用ドライブレコーダ。
【請求項6】
車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダと、
この車載用ドライブレコーダに保存された画像をデモ走行またはルート案内の際に表示することが可能とされた車載用ナビゲーション装置と
を備えた車載用ナビゲーションシステムであって、
前記車載用ドライブレコーダが、
前記画像を保存するための制御を行う制御手段を備え、
この制御手段が、
前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、
既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御と
を行うことを特徴とする車載用ナビゲーションシステム。
【請求項7】
前記制御手段が、前記見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行うことを特徴とする請求項6に記載の車載用ナビゲーションシステム。
【請求項8】
前記2つの画像のうち、少なくとも、前記取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果であることを特徴とする請求項6または請求項7に記載の車載用ナビゲーションシステム。
【請求項9】
前記既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、
前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報であること
を特徴とする請求項6乃至請求項8のいずれか1項に記載の車載用ナビゲーションシステム。
【請求項10】
前記周辺車両検出手段が、レーダであることを特徴とする請求項8または請求項9に記載の車載用ナビゲーションシステム。
【請求項1】
車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダであって、
前記画像を保存するための制御を行う制御手段を備え、
この制御手段は、
前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、
既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御と
を行うことを特徴とする車載用ドライブレコーダ。
【請求項2】
前記制御手段が、前記見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行うことを特徴とする請求項1に記載の車載用ドライブレコーダ。
【請求項3】
前記2つの画像のうち、少なくとも、前記取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果であることを特徴とする請求項1または請求項2に記載の車載用ドライブレコーダ。
【請求項4】
前記既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、
前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報であること
を特徴とする請求項1乃至請求項3のいずれか1項に記載の車載用ドライブレコーダ。
【請求項5】
前記周辺車両検出手段が、レーダであることを特徴とする請求項3または請求項4に記載の車載用ドライブレコーダ。
【請求項6】
車両に搭載されたカメラによって前記車両の走行地点において撮影された画像を保存する車載用ドライブレコーダと、
この車載用ドライブレコーダに保存された画像をデモ走行またはルート案内の際に表示することが可能とされた車載用ナビゲーション装置と
を備えた車載用ナビゲーションシステムであって、
前記車載用ドライブレコーダが、
前記画像を保存するための制御を行う制御手段を備え、
この制御手段が、
前記車両の走行地点において撮影された画像を保存する際に、少なくとも、前記画像が撮影された際に前記車両の周辺に存在していた周辺車両の情報を、前記画像と関連づけて保存するための制御と、
既に保存されている画像が撮影された走行地点と同一の走行地点において自車両に搭載されたカメラによって撮影された画像が取得された場合に、この取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報と、前記既に保存されている画像が撮影された際における周辺車両の情報とを比較し、前記既に保存されている画像および前記取得された画像の2つの画像のうち、見通しが良好な方の画像を優先して保存するための制御と
を行うことを特徴とする車載用ナビゲーションシステム。
【請求項7】
前記制御手段が、前記見通しが良好な方の画像として、周辺車両の数が少ない方の画像を優先して保存するための制御を行うことを特徴とする請求項6に記載の車載用ナビゲーションシステム。
【請求項8】
前記2つの画像のうち、少なくとも、前記取得された画像が撮影された際に前記自車両の周辺に存在していた周辺車両の情報が、前記自車両の周辺に存在する周辺車両の情報を検出する周辺車両検出手段の検出結果であることを特徴とする請求項6または請求項7に記載の車載用ナビゲーションシステム。
【請求項9】
前記既に保存されている画像が、他車両に搭載されたカメラによって撮影された画像であり、
前記既に保存されている画像が撮影された際における周辺車両の情報が、前記他車両に搭載されたカメラによって撮影された画像が撮影された際に前記他車両の周辺に存在していた周辺車両の情報であること
を特徴とする請求項6乃至請求項8のいずれか1項に記載の車載用ナビゲーションシステム。
【請求項10】
前記周辺車両検出手段が、レーダであることを特徴とする請求項8または請求項9に記載の車載用ナビゲーションシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−290276(P2006−290276A)
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願番号】特願2005−116807(P2005−116807)
【出願日】平成17年4月14日(2005.4.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年10月26日(2006.10.26)
【国際特許分類】
【出願日】平成17年4月14日(2005.4.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]