
車載用ナビゲーション装置およびマップマッチング動作制御方法
【課題】 幅広の主道路に側道が併走していて、これらの間を接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍において車線変更せざるを得ないケースであっても、自車位置のミスマッチを未然に回避できる「車載用ナビゲーション装置およびマップマッチング動作制御方法」を提供する。
【解決手段】 自車両が現に走行している現走道路の進行方向前方に車線変更を要する道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路CR1が存在する場合であって、現走道路のうち道路特定部を含む所定距離のマップマッチング規制区間RIを自車両が走行中の場合、マップマッチング動作を中止させることにより、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することがないようにする。
【解決手段】 自車両が現に走行している現走道路の進行方向前方に車線変更を要する道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路CR1が存在する場合であって、現走道路のうち道路特定部を含む所定距離のマップマッチング規制区間RIを自車両が走行中の場合、マップマッチング動作を中止させることにより、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することがないようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置およびマップマッチング動作制御方法に関し、特に、自律航法による測位機能と、GPS(Global Positioning System)受信機を用いた衛星航法による測位機能とを有する車載用ナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
車載用ナビゲーション装置は、自律航法及びGPS受信機による衛星航法を駆使して自車両の現在位置(以下、”自車位置”と言う。)を検出し、地図画面上に自車位置を示すマークを重ね合わせて表示する。これより、自車両が現在どこを走行しているのかを一目でわかるようにしている。
【0003】
最近の車載用ナビゲーション装置としては、道路交通情報センターから送られてくる道路交通情報を受信してナビゲーション画面上に表示する、道路交通情報表示機能を搭載したものが普及している。道路交通情報表示機能を搭載した車載用ナビゲーション装置では、時々刻々と変化する渋滞や交通規制などの道路交通情報を、リアルタイムでユーザーに提供することができる。
【0004】
また、車載用ナビゲーション装置では、自律航法による累積誤差等を解消し、自車位置を地図画面上の該当する道路に適確に合わせこむ目的で、マップマッチングと呼ばれる動作を行うものが知られている。このマップマッチングは、例えば、自律航法で算出された自車位置を道路リンク上に引き付けることによって行われる。
【0005】
ところが、例えば、ランダバウトのような複雑な交差点を通る場合や、比較的小さい角度で分岐している道路(微小角分岐道路)を走行する場合など、車両の走行環境によっては、マップマッチング動作を行ったために却って自車位置のミスマッチを招来するおそれがある。
【0006】
こうした不具合を解消するために、本願出願人は、あらかじめ定めた条件を満たす複雑交差地域においては、マップマッチングによる自車位置マークの道路上への表示修正処理を停止する技術を提案している(例えば、特許文献1参照)。
【0007】
また、本願出願人は、微小角分岐道路において道路リンクの分岐点とは別に、分岐用車線へ最初に分岐可能な地点を分岐開始点として地図データベース上に定義しておき、分岐開始点またはその地点の所定距離手前からマップマッチングを中止し、道路リンクの分岐点を通り抜けた後に、ある状態を検出したときにマップマッチングを再開する技術を提案している(例えば、特許文献2参照)。
【0008】
特許文献1,2に係る技術によれば、ランダバウトのような複雑な交差点を通る場合や、微小角分岐道路を走行する場合に、マップマッチング動作を行ったために却って自車位置のミスマッチを招来するといった不都合を未然に回避することができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−132922号公報
【特許文献2】特開2008−170267号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述したようなマップマッチング動作に起因する不都合が生じるのは、特許文献1,2に係るケースに限られない。例えば、幅広の主道路に側道が併走している場所を走行している場合に、主道路上で車線変更を行うケースでも、マップマッチング動作に起因する不都合を生じるおそれがある。すなわち、主道路上で車線変更をしただけなのに、主道路から側道に自車位置が引き付けられるというミスマッチを生じることがある。
【0011】
こうした不都合を防止するために、従来、主道路と側道との間の接続性(分岐路の存否)を考慮したマップマッチング動作が行われている。すなわち、主道路と側道との間を結ぶ分岐路が存在しない箇所では、主道路から側道への車両移動は事実上起こり得ない。このため、分岐路が存在しない箇所では自車位置の側道へのマップマッチング動作を禁止する。逆に、主道路と側道との間を結ぶ分岐路が存在する箇所では、主道路から側道への車両移動は現実に起こり得る。このため、分岐路が存在する箇所では自車位置の側道へのマップマッチング動作を許可する。これにより、主道路を現に走行中であるにもかかわらず、自車位置が側道へとミスマッチされる不具合を未然に回避していた。
【0012】
しかしながら、主道路と側道との間を結ぶ分岐路が存在する道路環境では、分岐路の存否に依拠した側道へのミスマッチ予防対策は必ずしも有効とは言えない。例えば、主道路に生じた車線規制により車線変更せざるを得ず、その車線変更の方向と、主道路から側道への分岐路の延伸方向とが略同等であるケースでは、自車位置が側道へとミスマッチされる蓋然性が高くなる。
【0013】
本発明は、こうした課題を解決するためになされたものであり、主道路に側道が併走していて、これらの間を接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍において車線変更せざるを得ないケースであっても、自車位置のミスマッチを未然に回避できるようにすることを目的とする。
【課題を解決するための手段】
【0014】
上記した課題を解決するために、本発明では、マップマッチング動作制御部は、自車両が現に走行している現走道路の進行方向前方に車線変更を要する道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在する場合であって、現走道路のうち道路特定部を含む所定距離のマップマッチング規制区間を自車両が走行中の場合、マップマッチング部の動作を中止させる制御を行うこととした。
【発明の効果】
【0015】
上記のように構成した本発明によれば、分岐路が近傍に存在するマップマッチング規制区間を走行中に車線変更を行った場合にはマップマッチング動作は行われない。このため、分岐路の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路に側道が併走しており、主道路と側道とを接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係る車載用ナビゲーション装置の構成を示すブロック図である。
【図2】リンクまたはノードに対して道路特定部に係る情報が付加された状態を概念的に示す説明図である。
【図3】図1の制御部が有する複数の機能の相関関係を表すブロック図である。
【図4】図1の車載用ナビゲーション装置が行うマップマッチング動作制御に係る処理の流れを示すフロー図である。
【図5】自車両の走行位置とマップマッチング動作状態との関係を表す説明図である。
【図6】リンクに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図である。
【図7】ノードに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図である。
【図8】リンクに対して道路特定部情報が付加されている場合の第2のマップマッチング規制区間の設定例に係る説明図である。
【図9】リンクに対して道路特定部情報が付加されている場合の第3のマップマッチング規制区間の設定例に係る説明図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について、添付の図面を参照しながら詳細に説明する。
【0018】
(車載用ナビゲーション装置の概略構成)
図1は、本実施形態に係る車載用ナビゲーション装置の構成を示すブロック図、図2(A),(B)は、リンクまたはノードに対して道路特定部情報が付加された状態を概念的に示す説明図である。
【0019】
本実施形態に係る車載用ナビゲーション装置11は、入力系要素13と、処理系要素15と、出力系要素17とを備える。入力系要素13としては、ハードディスクドライブ(HDD)21と、操作部23と、交通情報受信機25と、自律航法センサ29とがある。
【0020】
HDD21は、地図表示や経路探索などに必要な地図データを記憶している。なお、HDD21に代えて又は加えて、DVD−ROM、CD−ROM、SDメモリカードなどの、いかなる態様の記録媒体を採用しても良い。HDD21に記憶されたデジタル形式の地図データは、地図表示に必要なデータからなる描画ユニットと、マップマッチングや経路探索等の処理に必要なデータからなる道路ユニットと、交差点の詳細データからなる交差点ユニットとを含む。
【0021】
このうち、道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、あるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含む。具体的には、道路ユニットは、全てのノードに係る詳細データを納めたノードテーブルと、全てのリンクに係る詳細データを納めたリンクテーブルとを含む。
【0022】
ノードテーブルは、複数のノード毎に、それぞれの正規化経度・緯度情報等を含む付加情報を対応付けて格納する。正規化経度・緯度情報は、所定の区画を基準とした経度方向・緯度方向の相対位置を示す。
【0023】
リンクテーブルは、複数のリンク毎に、それぞれの距離、コスト、種別フラグ等を含む付加情報を対応付けて格納する。リンクの距離は、各リンクに対応した実際の道路の距離を示す。リンクのコストは、リンクの距離をもとに、道路幅員、道路種別、右左折、交通規制などに応じた所定の定数を乗じた値であり、誘導経路としての適正度を数値化したものである。種別フラグは、そのリンクに対応した実際の道路が高速道であるか一般道であるかといった種別を示す。
【0024】
操作部23は、後述の制御部33に対する各種指令(例えば、画面スクロールや地図検索、拡大/縮小など)の入力、誘導経路の設定操作、各種データの設定操作等を行う際に用いられる。操作部23の実施形態としては、リモコンやタッチパネルなどを適宜組み合わせて採用すれば良い。
【0025】
交通情報受信機25は、道路交通情報センターから送信されてきた渋滞や交通規制などの道路交通情報(”道路交通情報”は、特許請求の範囲の”交通情報”に相当する。)を受信する。道路交通情報の伝送媒体としては、FM多重放送、道路上の各所に設けた発信機からの光/電波通信などが用いられる。
【0026】
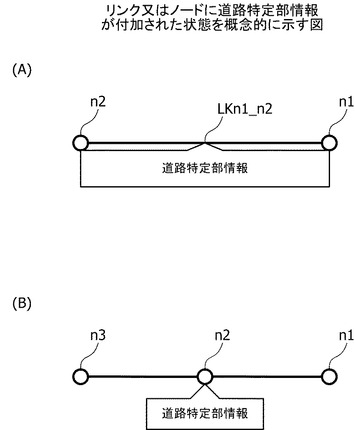
道路交通情報の中には、道路特定部情報が含まれている。道路特定部情報とは、例えば、車線規制や交互通行等の交通規制がどのリンクで行われているのか、または、「故障車あり」、「その他の危険」、「すべりやすい」、「動物が飛び出す恐れあり」等の道路状況がどのリンクにおいて生じているのかの、車線変更を要する道路特定部に係る規制内容及び位置の情報を言う。具体的には、例えば図2(A)に示すように、ノードn1とノードn2との間を結ぶリンクLKn1_n2に対して道路特定部情報が付加される。
【0027】
この道路特定部情報は、道路交通情報センターから各車両宛に伝送される。本実施形態に係る車載用ナビゲーション装置11は、道路交通情報センターから送信された道路特定部情報を交通情報受信機25により取得することができる。この場合、車載用ナビゲーション装置11は、例えば、あるリンクにおいて、車線規制が行われている旨や、「故障車あり」の道路状況が生じている旨などの情報を取得することができる。
【0028】
なお、道路特定部情報を、リンクに関連付けて付加する態様に代えて、または加えて、ノードに関連付けて付加してもよい。具体的には、例えば図2(B)に示すように、ノードn1とノードn3との中間に位置するノードn2に対し、道路特定部情報を付加してもよい。この場合、本実施形態に係る車載用ナビゲーション装置11は、例えば、あるノードが属する地点において、車線規制が行われている旨や、「故障車あり」の道路状況が生じている旨などの情報を取得することができる。
【0029】
自律航法センサ29は、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)29aと、所定距離を走行する毎にパルスを出力する距離センサ29bとを備える。自律航法センサ29は、角度センサ29a及び距離センサ29bにより自車両の相対位置及び方位をそれぞれ検出し、検出した情報を制御部33に出力する。
【0030】
処理系要素15としては、バッファメモリ31と、制御部33と、地図描画部35と、操作画面・マーク発生部37と、画像合成部39とがある。バッファメモリ31は、後述の地図データ読出部55による読出指令に従ってHDD21から読み出された地図データを一時的に格納する。こうして格納された地図データは、地図データ読出部55により必要に応じて参照される。
【0031】
制御部33は、例えば、CPU(Central processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えたマイクロコンピュータにより構成される。CPUは、ROMに格納されたプログラムに従って、RAMをワークエリアとして用いて各種処理を実行する。具体的には、制御部33は、自律航法センサ29の出力信号に基づいて自車位置を検出し、自車位置を該当する道路に対応付けるマップマッチングの動作制御等を実行する。これにより、制御部33は、マップマッチング動作の制御を適切に行いながら、後述する表示装置41の地図画面の道路上に自車位置マークを重ね合わせて表示する。制御部33の内部構成については後述する。
【0032】
地図描画部35は、マップマッチングされた自車位置と、バッファメモリ31に格納された地図データとに基づいて、自車位置周辺の地図画像を描画し、描画した地図画像データを画像合成部39に出力する。操作画面・マーク発生部37は、ナビゲーション装置11の稼動状況に応じて各種の操作画面や自車位置マーク、カーソル等の画像を生成し、生成した操作画面・マーク等の画像データを画像合成部39に出力する。画像合成部39は、地図描画部35で描画された地図画像に、操作画面・マーク発生部37で生成された操作画面及び各種マーク等の画像を合成して、表示装置41の画面に表示する。
【0033】
出力系要素17としての表示装置41は、例えば液晶表示パネルからなる。表示装置41は、画像合成部39から転送されてきた表示制御信号に従って、ナビゲーション画像を表示する。このナビゲーション画像は、例えば、自車位置の周辺地図、自車位置マークなどを含む。また、表示装置41は、操作部23を介して入力された各種操作指示に関する情報や操作画面などを表示する。
【0034】
(制御部33の概略構成)
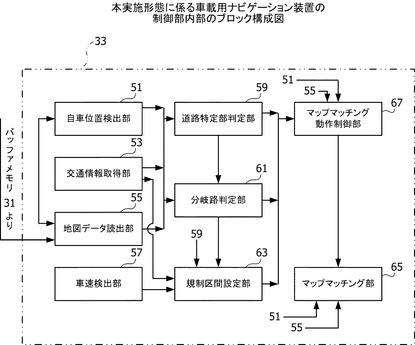
次に、制御部33の内部構成について図面を参照して説明する。図3は、図1の制御部33が有する複数の機能の相関関係を表すブロック図である。制御部33は、図3に示すように、自車位置検出部51、交通情報取得部53、地図データ読出部55、車速検出部57、道路特定部判定部59、分岐路判定部61、規制区間設定部63、マップマッチング部65、及びマップマッチング動作制御部67の各機能部を含んで構成される。
【0035】
自車位置検出部51は、自律航法センサ29から得られる自車両の相対的な位置データに基づいて自車位置を検出する。交通情報取得部53は、交通情報受信機25経由で受信した道路交通情報を取得する。道路交通情報は、前述したように、道路特定部情報を含む。なお、本発明が想定している交通情報としては、例えばVICS情報(”VICS”は登録商標)をはじめとする道路交通情報に限定さない。車線変更を要する道路特定部に係る規制内容及び位置の情報を含んでさえいれば、いかなる形態の情報であってもよい。
【0036】
地図データ読出部55は、自車位置検出部51で検出された自車位置に基づいて生成される読出指令に従って、HDD21から所要の地図データを読み出してバッファメモリ31に記憶させる。車速検出部57は、距離センサ29bから出力された移動距離データを時間微分することにより、時々刻々と変化する自車両の走行速度を検出する。
【0037】
道路特定部判定部59は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、地図データ読出部55によりバッファメモリ31から読み出される地図データとに基づいて、自車両が現に走行している現走道路の進行方向前方に道路特定部が存在するか否かを判定する。なお、誘導経路が存在しない場合の”現走道路”とは、自車両が右左折なしに直進を続けた場合に現に走行する道路をいう。誘導経路が存在する場合は、誘導経路に従う道路が”現走道路”となる。また、複数の車線を有する道路では、現在走行中の車線を”現走道路”とする。
【0038】
分岐路判定部61は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、バッファメモリ31に格納された地図データとに基づいて、道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在するか否かを判定する。ここで、”道路特定部の内方に分岐路が存在する”とは、道路特定部情報がリンクの付加情報として与えられており、道路特定部に係るリンクの区間(例えば、400mなど)内に分岐路が存在するケースを想定している。また、”道路特定部の近傍に分岐路が存在する”とは、道路特定部情報がノードの付加情報として与えられており、同ノードの近傍(例えば、同ノードを挟んで進行方向の前後各200m以内など)に分岐路が存在するケースを想定している。
【0039】
規制区間設定部63は、交通情報取得部53により取得した道路特定部に係るリンクを用いて、道路特定部を含む所定距離のマップマッチング規制区間を設定する。このマップマッチング規制区間の所定距離は、道路特定部に係るリンクの区間距離を基準として、この基準区間の前後に、後述の余裕代を必要に応じて付加することにより設定する。基準区間の前後に付加する余裕代は、予め定めた所定値を固定的に設定してもよいし、道路特定部に係るリンクの外方かつ近傍に他の分岐路が存在するか否かに基づいて可変設定してもよい。また、自車両の走行速度に基づいて可変設定してもよい。これらについては後述する。
【0040】
マップマッチング部65は、自律航法センサ29の出力信号に基づき自車位置検出部51により検出した自車位置と、バッファメモリ31に格納された地図データとに基づいて、地図画面上の該当する道路上に、自車位置を対応付けるマップマッチング動作を行う。具体的には、マップマッチング部65は、自律航法センサ29の出力信号に基づき検出した自車位置と、自車位置の周辺道路との間の相対位置関係に基づいて、検出した自車位置との間の相対距離が最も小さい道路を探索し、この探索によりヒットした道路上に、自車位置を対応付けるように動作する。なお、マップマッチング部65は、自律航法センサ29により検出した自車位置と周辺道路間の相対距離がある程度以上大きい場合は、必要に応じて、GPS受信機(不図示)により得られる自車両の絶対的な位置データを参照してもよい。
【0041】
マップマッチング動作制御部67は、自車位置検出部51により検出した自車位置と、バッファメモリ31に格納された自車位置周辺の地図データと、規制区間設定部63で設定される所定距離のマップマッチング規制区間とに基づいて、自車両がマップマッチング規制区間を走行中か否かを判断する。また、マップマッチング動作制御部67は、現走道路の進行方向前方に道路特定部が存在すると道路特定部判定部59により判定され、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在すると分岐路判定部61により判定された場合であって、マップマッチング規制区間を自車両が走行中の場合、マップマッチング部65の動作を中止させる制御を行う。
【0042】
(マップマッチング動作制御に係る処理の流れ)
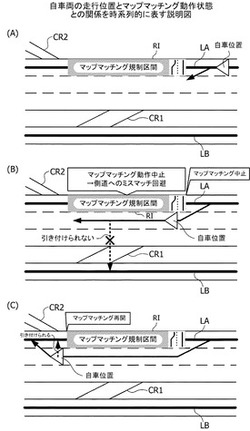
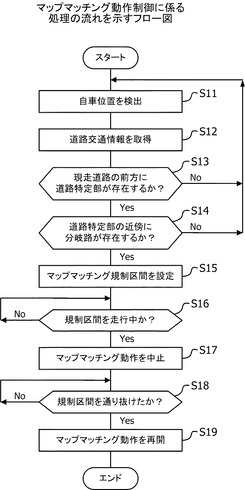
次に、本実施形態に係る車載用ナビゲーション装置11が行うマップマッチング動作制御に係る処理の流れについて、図面を参照して説明する。図4は、マップマッチング動作制御に係る処理の流れを示すフロー図、図5(A),(B),(C)は、自車位置とマップマッチング動作状態との関係を時系列的に表す説明図である。
【0043】
図4に示すステップS11において、自車位置検出部51は、自律航法センサ29により得られる自車両の相対的な位置データに基づいて、自車位置を検出する。ステップS12(”交通情報取得工程”に相当する)において、交通情報取得部53は、交通情報受信機25経由で受信した道路交通情報を取得する。本実施形態では、道路交通情報に含まれる道路特定部情報として、車線規制に係る情報を取得したとする。
【0044】
ステップS13(”道路特定部判定工程”に相当する)において、道路特定部判定部59は、自車位置検出部51により検出した自車位置と、交通情報取得部53で取得した道路交通情報に含まれる道路特定部情報(車線規制に係る情報)と、バッファメモリ31の地図データとに基づいて、現走道路の進行方向前方に道路特定部が存在するか否かを判定する。
【0045】
ステップS13の判定の結果、現走道路の進行方向前方に道路特定部が存在しない旨の判定が下された場合、制御部33は、処理の流れをステップS11に戻し、以下の処理を繰り返す。一方、ステップS13の判定の結果、現走道路の進行方向前方に道路特定部が存在する旨の判定が下された場合、ステップS14(”分岐路判定工程”に相当する)において、分岐路判定部61は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、バッファメモリ31に格納された地図データとに基づいて、ステップS13によりその存在が確認された道路特定部の内方又は近傍に、現走道路から分岐する分岐路CR1が存在するか否かを判定する。
【0046】
ステップS14の判定の結果、道路特定部の内方又は近傍のいずれにも分岐路CR1が存在しない旨の判定が下された場合、制御部33は、処理の流れをステップS11に戻し、以下の処理を繰り返す。一方、ステップS14の判定の結果、道路特定部の内方又は近傍のいずれかに分岐路CR1が存在する旨の判定が下された場合、ステップS15において、規制区間設定部63は、交通情報取得部53により取得した道路特定部に係るリンクを用いて、道路特定部を丸ごと含む所定距離のマップマッチング規制区間RIを設定する。
【0047】
ステップS16において、マップマッチング動作制御部67は、ステップS11で自車位置検出部51により検出した自車位置と、バッファメモリ31の地図データと、ステップS15で規制区間設定部63により設定されたマップマッチング規制区間RIとに基づいて、自車両がマップマッチング規制区間RIを走行中か否かを判断する。ステップS16の判断は、自車両がマップマッチング規制区間RIに到達するまで繰り返される。自車両がマップマッチング規制区間RIに到達し、マップマッチング規制区間RIを走行中であると判断されると、ステップS17(”マップマッチング動作制御工程”に相当する)において、マップマッチング動作制御部67は、マップマッチング部65の動作を中止させる制御を行う。
【0048】
ステップS18において、マップマッチング動作制御部67は、ステップS11で自車位置検出部51により検出した自車位置と、バッファメモリ31の地図データと、ステップS15で規制区間設定部63により設定されたマップマッチング規制区間RIとに基づいて、自車両がマップマッチング規制区間RIを通り抜けたか否かを判断する。ステップS18の判断は、自車両がマップマッチング規制区間RIを通り抜けるまで繰り返される。
【0049】
自車両がマップマッチング規制区間RIを通り抜けたと判断されると、ステップS19において、マップマッチング動作制御部67は、マップマッチング部65の動作を再開させる制御を行う。つまり、マップマッチング動作制御部67は、マップマッチング部65の動作を中止させた後、自車両がマップマッチング規制区間RIを通り抜けた場合、マップマッチング部65の動作を再開させる。
【0050】
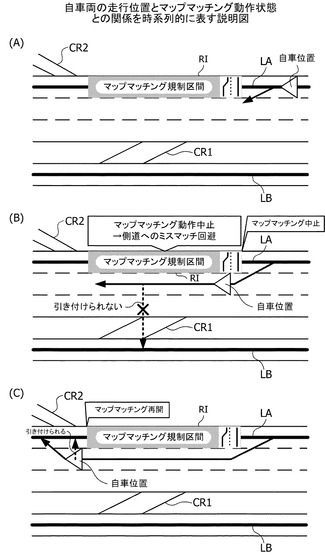
ここで、自車両の走行位置とマップマッチング動作状態との関係を、図5(A),(B),(C)に基づいて時系列的に説明する。前提として、3車線の主道路(道路特定部に係るリンクや車線毎のリンクを含む各種のリンク群が対応付けられている)LAに併走する側道(主道路と同様に、各種のリンク群が対応付けられている)LBがあり、主道路LAと側道LBとを結ぶ分岐路CR1が存在するものとする。主道路LAを走行中の自車両の進行方向前方に道路特定部(例えば車線規制された区間)が存在し、かつ、この道路特定部の内方又は近傍に分岐路CR1が存在するものとする。そして、道路特定部を丸ごと含む所定距離のマップマッチング規制区間RIが設定されているものとする。
【0051】
図5(A)に示すように、主道路LAのうち最も右側の車線を走行中に、車線規制に遭遇した自車両は、その走行車線を左側に移動させる。この移動方向の先には分岐路CR1がある。仮に、自車両に搭載された車載用ナビゲーション装置11が通常通りのマップマッチング動作を実行すると、自車位置が側道LBに引き付けられて、自車位置のミスマッチを生じるおそれがある。
【0052】
これに対して、本実施形態の場合、マップマッチング規制区間RIに到達した自車両の車載用ナビゲーション装置11では、図5(B)に示すように、マップマッチング動作が中止される。このため、自車両の移動方向の先に分岐路CR1が存在するにもかかわらず、自車位置が側道LBに引き付けられることはない。従って、自車位置の側道LBへのミスマッチを未然に回避することができる。
【0053】
マップマッチング規制区間RIを通り抜けた自車両の車載用ナビゲーション装置11では、図5(C)に示すように、マップマッチング動作が再開される。これにより、自車両が主道路LAのうち最も右側の車線に戻れば、この最も右側の車線に自車位置が速やかに引き付けられて、迅速かつ適切なタイミングをもってマップマッチング動作を実現することができる。
【0054】
要するに、分岐路CR1が近傍に存在するマップマッチング規制区間RIを走行中に車線変更を行った場合には、マップマッチング動作は行われない。このため、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路LAに側道LBが併走しており、主道路LAと側道LBとを接続する分岐路CR1が存在し、かつ、主道路LAのうち分岐路CR1の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【0055】
(マップマッチング規制区間の設定例)
前述したマップマッチング規制区間RIの設定例は、大きく分けて三つある。これらについて図面を参照して説明する。
図6(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図、図7(A),(B),(C)は、ノードに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図、図8(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第2のマップマッチング規制区間の設定例に係る説明図、図9(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第3のマップマッチング規制区間の設定例に係る説明図である。
【0056】
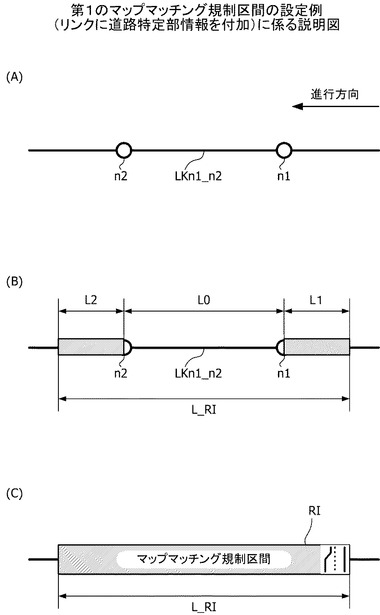
はじめに、リンクに対して道路特定部情報が付加されている場合の、第1のマップマッチング規制区間の設定例について説明する。第1のマップマッチング規制区間の設定例では、例えば図6(A)に示すように、ノードn1,n2間を結ぶリンクLKn1_n2(リンク区間距離;L0)で表される道路特定部に対し、その進行方向前後に第1及び第2の余裕代L1,L2をそれぞれ付加して、所定距離L_RIのマップマッチング規制区間RIを設定する。
【0057】
本例では、仮に、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであるとする。この場合、図6(A),(B),(C)に示すように、例えば、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0058】
道路特定部に係るリンクLKn1_n2とは、具体的には、例えば車線規制によって車線変更を要する道路区間である。この道路区間は、ひとつのリンクからなるものであってもよいし、相互に隣接する複数のリンクの集合からなるものであってもよい。道路特定部に係るリンクLKn1_n2を挟む前後の道路区間では、特段の車線変更を要しない通常の道路区間と比べて、車線変更が頻発することが多い。かかる道路区間では、通常の道路区間と比べて、自車位置のミスマッチを生じる蓋然性が高い。そこで、道路特定部に係るリンクLKn1_n2に対し、その進行方向前後に第1及び第2の余裕代L1,L2をそれぞれ付加する。これにより、前述した自車位置のミスマッチを抑制する。
【0059】
ただし、前述した第1及び第2の余裕代L1,L2は、本発明に係る必須の構成要素ではない。いずれか一方のみとしてもよいし、これらの値を”0”とすることもできる。第1及び第2の余裕代L1,L2を省略した場合、道路特定部に係るリンクLKn1_n2の区間距離L0は、マップマッチング規制区間RIの所定距離L_RIと等しくなる。位置及び距離の点で、両者はぴったりと重なり合う。また、第1及び第2の余裕代L1,L2は、それぞれを適宜の独立値としてもよい。要するに、マップマッチング規制区間RIは、道路特定部に係るリンクLKn1_n2を位置及び距離の観点から包含しさえすれば、いかなる長さに設定してもよい。
【0060】
このように、マップマッチング規制区間RIの設定に際し、道路特定部に係るリンクLKn1_n2を位置及び距離の観点から包含すべき旨の条件を課したのは、マップマッチング規制区間RIを外れて道路特定部が存在するようなケースを排除して、自車位置のミスマッチ抑止効果を適確に高めるためである。
【0061】
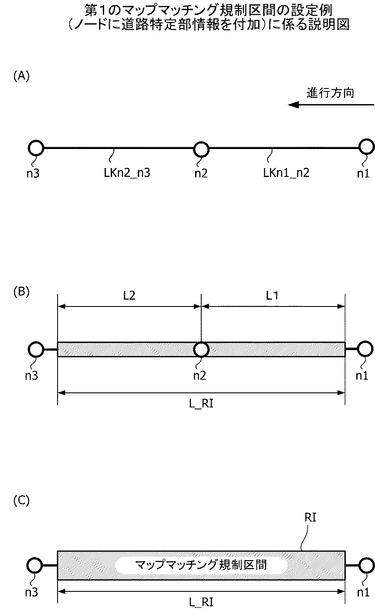
次に、ノードに対して道路特定部情報が付加されている場合の、第1のマップマッチング規制区間の設定例について説明する。本例では、図7(A)に示すように、ノードn1とノードn3の中間に位置するノードn2に対し、道路特定部情報が付加されているものとする。この場合、図7(A),(B),(C)に示すように、例えば、ノードn2を挟んで進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ200mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0062】
なお、前述した第1及び第2の余裕代L1,L2は、それぞれを適宜の独立値に設定してもよい。要するに、マップマッチング規制区間RIの所定距離L_RIは、車載用ナビゲーション装置11側において、任意の値に設定することができる。また、ノードに付加される道路特定部情報のなかに、第1及び第2の余裕代L1,L2を含ませる構成を採用してもよい。
【0063】
ところで、例えば図5(C)に示すように、分岐路CR1(マップマッチング規制区間RI内にある)の直後に、他の分岐路CR2(マップマッチング規制区間RI外にある)が存在するような複雑な道路環境では、運転者は、他の分岐路CR2を通り抜ける前までの短時間で自車両の進行方向を瞬時に判断しなければならない。こうしたケースにおいて、地図画面上の自車位置を迅速かつ適時に提示することができれば、ユーザーの利便性が高まる。
【0064】
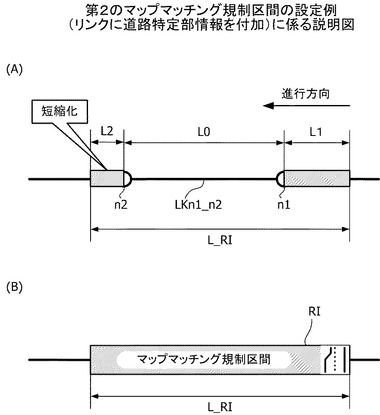
こうした観点から、第2のマップマッチング規制区間の設定例では、道路特定部(ただし、リンクの形態に限る)の外方かつ近傍に他の分岐路CR2が存在するか否かに基づいて、マップマッチング規制区間RIの所定距離L_RIを可変設定することとした。ここで、他の分岐路CR2が存在しない通常時では、図6の例と同様に、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加して、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0065】
一方、他の分岐路CR2が存在する場合は、マップマッチング規制区間RIの所定距離L_RIを、他の分岐路CR2が存在しない通常時よりも短く設定する。例えば、図8(A)に示すように、仮に、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであり、かつ、同リンクLKn1_n2の内方(マップマッチング規制区間RI内)に分岐路CR1が存在し、その外方かつ近傍(マップマッチング規制区間RI外)に他の分岐路CR2が存在するものとする。
【0066】
この場合は、図8(A),(B)に示すように、第2の余裕代L2を、他の分岐路CR2が存在しない通常時(100m)と比べて短く設定する。要するに、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を100mだけ付加すると共に、前方側に第2の余裕代L2を通常時(100m)と比べて短い距離(例えば50m)だけ付加する。これにより、都合400m未満300m以上(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0067】
第2のマップマッチング規制区間の設定例では、道路特定部に係るリンクの外方かつ近傍に他の分岐路CR2が存在する場合、マップマッチング規制区間RIの所定距離L_RIを、道路特定部に係るリンクの外方かつ近傍に他の分岐路CR2が存在しない通常時と比べて短く設定する。このため、他の分岐路CR2が存在しない通常時と比べて、マップマッチング規制区間RIを通り抜けた後に、地図画面上の自車位置を該当する道路へと迅速かつ適時に対応付けることができる。従って、例えば、分岐路CR1の直後に他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、ユーザーの利便性を向上させることができる。
【0068】
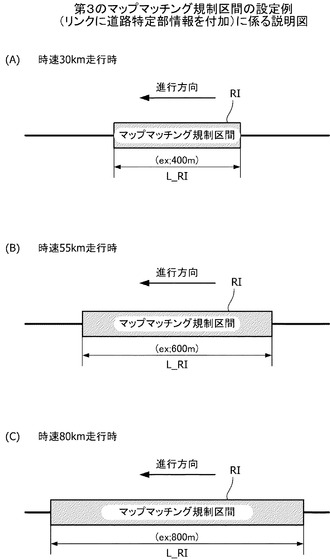
ところで、車両が車線変更を行う際に要する走行距離は、一般に、車速が増すにつれて長くなる。かかる知見に基づき、本発明者は、マップマッチング規制区間RIの所定距離L_RIを自車両の走行速度に基づいて可変設定すれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作制御を実行することができることに気づいた。かかる発想をもとに、第3のマップマッチング規制区間の設定例では、自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを可変設定することとした。
【0069】
自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを演算するには、一定の時間を要する。この時間を確保するため、自車両の走行速度のサンプリングポイントとしては、自車両がマップマッチング規制区間RIに到達する前の地点(例えば、道路特定部に対して進行方向で500m手前側の地点など)を適宜採用するのが好ましい。
【0070】
具体的には、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであるとする。この場合において、例えば、自車両の走行速度が時速30kmと低速の場合、図9(A)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0071】
また、例えば、自車両の走行速度が時速55kmと中速の場合、図9(B)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ200mずつ付加する。これにより、都合600m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0072】
そして、例えば、自車両の走行速度が時速80kmと高速の場合には、図9(C)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ300mずつ付加する。これにより、都合800m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0073】
なお、自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを可変設定するに際しては、例えば、自車両の速度範囲のバリエーション(例えば、時速0〜35km、時速35〜70km、時速70〜105kmなど)に対応付けて第1及び第2の余裕代L1,L2の値をそれぞれ割り当てるテーブルルックアップ方式を採用してもよい。また、自車両の走行速度をパラメータとして含む所定の計算式を用いて第1及び第2の余裕代L1,L2の値を逐次求める逐次計算方式を採用してもよい。
【0074】
第3のマップマッチング規制区間の設定例では、自車両の走行速度に基づいて、マップマッチング規制区間RIの所定距離L_RIを可変設定することとした。第3のマップマッチング規制区間の設定例によれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作の制御を実行することができる。
【0075】
以上説明したように、本実施形態に係る車載用ナビゲーション装置11によれば、マップマッチング動作制御部67は、現走道路の進行方向前方に道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路CR1が存在する場合であって、自車両がマップマッチング規制区間RIを走行中の場合、マップマッチング部65の動作を中止させる制御を行うこととした。
【0076】
これにより、分岐路CR1が近傍に存在するマップマッチング規制区間RIを走行中に車線変更を行った場合には、マップマッチング動作は行われない。このため、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路と側道とが併走しており、主道路と側道とを接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【0077】
また、本実施形態に係る車載用ナビゲーション装置11によれば、規制区間設定部63の働きによって、マップマッチング規制区間RIの可変設定を簡易に実現することができる。
【0078】
例えば、道路特定部に係るリンクの外方かつ近傍にも他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、規制区間設定部65は、マップマッチング規制区間RIの所定距離L_RIを、他の分岐路CR2が存在しない通常時と比べて短く設定する。このため、自車両がマップマッチング規制区間RIを通り抜けた後に、速やかにマップマッチング動作を再開させることができる。従って、例えば、分岐路CR1の直後に他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、ユーザーの利便性を向上させることができる。
【0079】
または、規制区間設定部65は、車速検出部57の車速検出結果に基づいて所定距離L_RIを可変設定するようにしている。このように構成すれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作の制御を実行することができる。
【0080】
なお、本実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎない。このため、これによって本発明の技術的範囲が限定的に解釈されてはならない。すなわち、本発明はその要旨またはその主要な特徴から逸脱することなく、様々な形態で実施することができる。
【符号の説明】
【0081】
11 車載用ナビゲーション装置
33 制御部
51 自車位置検出部
53 交通情報取得部
55 地図データ読出部
57 車速検出部
59 道路特定部判定部
61 分岐路判定部
63 規制区間設定部
65 マップマッチング部
67 マップマッチング動作制御部
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置およびマップマッチング動作制御方法に関し、特に、自律航法による測位機能と、GPS(Global Positioning System)受信機を用いた衛星航法による測位機能とを有する車載用ナビゲーション装置に用いて好適なものである。
【背景技術】
【0002】
車載用ナビゲーション装置は、自律航法及びGPS受信機による衛星航法を駆使して自車両の現在位置(以下、”自車位置”と言う。)を検出し、地図画面上に自車位置を示すマークを重ね合わせて表示する。これより、自車両が現在どこを走行しているのかを一目でわかるようにしている。
【0003】
最近の車載用ナビゲーション装置としては、道路交通情報センターから送られてくる道路交通情報を受信してナビゲーション画面上に表示する、道路交通情報表示機能を搭載したものが普及している。道路交通情報表示機能を搭載した車載用ナビゲーション装置では、時々刻々と変化する渋滞や交通規制などの道路交通情報を、リアルタイムでユーザーに提供することができる。
【0004】
また、車載用ナビゲーション装置では、自律航法による累積誤差等を解消し、自車位置を地図画面上の該当する道路に適確に合わせこむ目的で、マップマッチングと呼ばれる動作を行うものが知られている。このマップマッチングは、例えば、自律航法で算出された自車位置を道路リンク上に引き付けることによって行われる。
【0005】
ところが、例えば、ランダバウトのような複雑な交差点を通る場合や、比較的小さい角度で分岐している道路(微小角分岐道路)を走行する場合など、車両の走行環境によっては、マップマッチング動作を行ったために却って自車位置のミスマッチを招来するおそれがある。
【0006】
こうした不具合を解消するために、本願出願人は、あらかじめ定めた条件を満たす複雑交差地域においては、マップマッチングによる自車位置マークの道路上への表示修正処理を停止する技術を提案している(例えば、特許文献1参照)。
【0007】
また、本願出願人は、微小角分岐道路において道路リンクの分岐点とは別に、分岐用車線へ最初に分岐可能な地点を分岐開始点として地図データベース上に定義しておき、分岐開始点またはその地点の所定距離手前からマップマッチングを中止し、道路リンクの分岐点を通り抜けた後に、ある状態を検出したときにマップマッチングを再開する技術を提案している(例えば、特許文献2参照)。
【0008】
特許文献1,2に係る技術によれば、ランダバウトのような複雑な交差点を通る場合や、微小角分岐道路を走行する場合に、マップマッチング動作を行ったために却って自車位置のミスマッチを招来するといった不都合を未然に回避することができる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2004−132922号公報
【特許文献2】特開2008−170267号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述したようなマップマッチング動作に起因する不都合が生じるのは、特許文献1,2に係るケースに限られない。例えば、幅広の主道路に側道が併走している場所を走行している場合に、主道路上で車線変更を行うケースでも、マップマッチング動作に起因する不都合を生じるおそれがある。すなわち、主道路上で車線変更をしただけなのに、主道路から側道に自車位置が引き付けられるというミスマッチを生じることがある。
【0011】
こうした不都合を防止するために、従来、主道路と側道との間の接続性(分岐路の存否)を考慮したマップマッチング動作が行われている。すなわち、主道路と側道との間を結ぶ分岐路が存在しない箇所では、主道路から側道への車両移動は事実上起こり得ない。このため、分岐路が存在しない箇所では自車位置の側道へのマップマッチング動作を禁止する。逆に、主道路と側道との間を結ぶ分岐路が存在する箇所では、主道路から側道への車両移動は現実に起こり得る。このため、分岐路が存在する箇所では自車位置の側道へのマップマッチング動作を許可する。これにより、主道路を現に走行中であるにもかかわらず、自車位置が側道へとミスマッチされる不具合を未然に回避していた。
【0012】
しかしながら、主道路と側道との間を結ぶ分岐路が存在する道路環境では、分岐路の存否に依拠した側道へのミスマッチ予防対策は必ずしも有効とは言えない。例えば、主道路に生じた車線規制により車線変更せざるを得ず、その車線変更の方向と、主道路から側道への分岐路の延伸方向とが略同等であるケースでは、自車位置が側道へとミスマッチされる蓋然性が高くなる。
【0013】
本発明は、こうした課題を解決するためになされたものであり、主道路に側道が併走していて、これらの間を接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍において車線変更せざるを得ないケースであっても、自車位置のミスマッチを未然に回避できるようにすることを目的とする。
【課題を解決するための手段】
【0014】
上記した課題を解決するために、本発明では、マップマッチング動作制御部は、自車両が現に走行している現走道路の進行方向前方に車線変更を要する道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在する場合であって、現走道路のうち道路特定部を含む所定距離のマップマッチング規制区間を自車両が走行中の場合、マップマッチング部の動作を中止させる制御を行うこととした。
【発明の効果】
【0015】
上記のように構成した本発明によれば、分岐路が近傍に存在するマップマッチング規制区間を走行中に車線変更を行った場合にはマップマッチング動作は行われない。このため、分岐路の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路に側道が併走しており、主道路と側道とを接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態に係る車載用ナビゲーション装置の構成を示すブロック図である。
【図2】リンクまたはノードに対して道路特定部に係る情報が付加された状態を概念的に示す説明図である。
【図3】図1の制御部が有する複数の機能の相関関係を表すブロック図である。
【図4】図1の車載用ナビゲーション装置が行うマップマッチング動作制御に係る処理の流れを示すフロー図である。
【図5】自車両の走行位置とマップマッチング動作状態との関係を表す説明図である。
【図6】リンクに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図である。
【図7】ノードに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図である。
【図8】リンクに対して道路特定部情報が付加されている場合の第2のマップマッチング規制区間の設定例に係る説明図である。
【図9】リンクに対して道路特定部情報が付加されている場合の第3のマップマッチング規制区間の設定例に係る説明図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について、添付の図面を参照しながら詳細に説明する。
【0018】
(車載用ナビゲーション装置の概略構成)
図1は、本実施形態に係る車載用ナビゲーション装置の構成を示すブロック図、図2(A),(B)は、リンクまたはノードに対して道路特定部情報が付加された状態を概念的に示す説明図である。
【0019】
本実施形態に係る車載用ナビゲーション装置11は、入力系要素13と、処理系要素15と、出力系要素17とを備える。入力系要素13としては、ハードディスクドライブ(HDD)21と、操作部23と、交通情報受信機25と、自律航法センサ29とがある。
【0020】
HDD21は、地図表示や経路探索などに必要な地図データを記憶している。なお、HDD21に代えて又は加えて、DVD−ROM、CD−ROM、SDメモリカードなどの、いかなる態様の記録媒体を採用しても良い。HDD21に記憶されたデジタル形式の地図データは、地図表示に必要なデータからなる描画ユニットと、マップマッチングや経路探索等の処理に必要なデータからなる道路ユニットと、交差点の詳細データからなる交差点ユニットとを含む。
【0021】
このうち、道路ユニットは、交差点や分岐など、複数の道路が交わる点に対応するノードに関する情報と、あるノードとこれに隣接する他のノードとの間を接続する、道路や車線等に対応するリンクに関する情報とを含む。具体的には、道路ユニットは、全てのノードに係る詳細データを納めたノードテーブルと、全てのリンクに係る詳細データを納めたリンクテーブルとを含む。
【0022】
ノードテーブルは、複数のノード毎に、それぞれの正規化経度・緯度情報等を含む付加情報を対応付けて格納する。正規化経度・緯度情報は、所定の区画を基準とした経度方向・緯度方向の相対位置を示す。
【0023】
リンクテーブルは、複数のリンク毎に、それぞれの距離、コスト、種別フラグ等を含む付加情報を対応付けて格納する。リンクの距離は、各リンクに対応した実際の道路の距離を示す。リンクのコストは、リンクの距離をもとに、道路幅員、道路種別、右左折、交通規制などに応じた所定の定数を乗じた値であり、誘導経路としての適正度を数値化したものである。種別フラグは、そのリンクに対応した実際の道路が高速道であるか一般道であるかといった種別を示す。
【0024】
操作部23は、後述の制御部33に対する各種指令(例えば、画面スクロールや地図検索、拡大/縮小など)の入力、誘導経路の設定操作、各種データの設定操作等を行う際に用いられる。操作部23の実施形態としては、リモコンやタッチパネルなどを適宜組み合わせて採用すれば良い。
【0025】
交通情報受信機25は、道路交通情報センターから送信されてきた渋滞や交通規制などの道路交通情報(”道路交通情報”は、特許請求の範囲の”交通情報”に相当する。)を受信する。道路交通情報の伝送媒体としては、FM多重放送、道路上の各所に設けた発信機からの光/電波通信などが用いられる。
【0026】
道路交通情報の中には、道路特定部情報が含まれている。道路特定部情報とは、例えば、車線規制や交互通行等の交通規制がどのリンクで行われているのか、または、「故障車あり」、「その他の危険」、「すべりやすい」、「動物が飛び出す恐れあり」等の道路状況がどのリンクにおいて生じているのかの、車線変更を要する道路特定部に係る規制内容及び位置の情報を言う。具体的には、例えば図2(A)に示すように、ノードn1とノードn2との間を結ぶリンクLKn1_n2に対して道路特定部情報が付加される。
【0027】
この道路特定部情報は、道路交通情報センターから各車両宛に伝送される。本実施形態に係る車載用ナビゲーション装置11は、道路交通情報センターから送信された道路特定部情報を交通情報受信機25により取得することができる。この場合、車載用ナビゲーション装置11は、例えば、あるリンクにおいて、車線規制が行われている旨や、「故障車あり」の道路状況が生じている旨などの情報を取得することができる。
【0028】
なお、道路特定部情報を、リンクに関連付けて付加する態様に代えて、または加えて、ノードに関連付けて付加してもよい。具体的には、例えば図2(B)に示すように、ノードn1とノードn3との中間に位置するノードn2に対し、道路特定部情報を付加してもよい。この場合、本実施形態に係る車載用ナビゲーション装置11は、例えば、あるノードが属する地点において、車線規制が行われている旨や、「故障車あり」の道路状況が生じている旨などの情報を取得することができる。
【0029】
自律航法センサ29は、車両の回転角度を検出する振動ジャイロ等の相対方位センサ(角度センサ)29aと、所定距離を走行する毎にパルスを出力する距離センサ29bとを備える。自律航法センサ29は、角度センサ29a及び距離センサ29bにより自車両の相対位置及び方位をそれぞれ検出し、検出した情報を制御部33に出力する。
【0030】
処理系要素15としては、バッファメモリ31と、制御部33と、地図描画部35と、操作画面・マーク発生部37と、画像合成部39とがある。バッファメモリ31は、後述の地図データ読出部55による読出指令に従ってHDD21から読み出された地図データを一時的に格納する。こうして格納された地図データは、地図データ読出部55により必要に応じて参照される。
【0031】
制御部33は、例えば、CPU(Central processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えたマイクロコンピュータにより構成される。CPUは、ROMに格納されたプログラムに従って、RAMをワークエリアとして用いて各種処理を実行する。具体的には、制御部33は、自律航法センサ29の出力信号に基づいて自車位置を検出し、自車位置を該当する道路に対応付けるマップマッチングの動作制御等を実行する。これにより、制御部33は、マップマッチング動作の制御を適切に行いながら、後述する表示装置41の地図画面の道路上に自車位置マークを重ね合わせて表示する。制御部33の内部構成については後述する。
【0032】
地図描画部35は、マップマッチングされた自車位置と、バッファメモリ31に格納された地図データとに基づいて、自車位置周辺の地図画像を描画し、描画した地図画像データを画像合成部39に出力する。操作画面・マーク発生部37は、ナビゲーション装置11の稼動状況に応じて各種の操作画面や自車位置マーク、カーソル等の画像を生成し、生成した操作画面・マーク等の画像データを画像合成部39に出力する。画像合成部39は、地図描画部35で描画された地図画像に、操作画面・マーク発生部37で生成された操作画面及び各種マーク等の画像を合成して、表示装置41の画面に表示する。
【0033】
出力系要素17としての表示装置41は、例えば液晶表示パネルからなる。表示装置41は、画像合成部39から転送されてきた表示制御信号に従って、ナビゲーション画像を表示する。このナビゲーション画像は、例えば、自車位置の周辺地図、自車位置マークなどを含む。また、表示装置41は、操作部23を介して入力された各種操作指示に関する情報や操作画面などを表示する。
【0034】
(制御部33の概略構成)
次に、制御部33の内部構成について図面を参照して説明する。図3は、図1の制御部33が有する複数の機能の相関関係を表すブロック図である。制御部33は、図3に示すように、自車位置検出部51、交通情報取得部53、地図データ読出部55、車速検出部57、道路特定部判定部59、分岐路判定部61、規制区間設定部63、マップマッチング部65、及びマップマッチング動作制御部67の各機能部を含んで構成される。
【0035】
自車位置検出部51は、自律航法センサ29から得られる自車両の相対的な位置データに基づいて自車位置を検出する。交通情報取得部53は、交通情報受信機25経由で受信した道路交通情報を取得する。道路交通情報は、前述したように、道路特定部情報を含む。なお、本発明が想定している交通情報としては、例えばVICS情報(”VICS”は登録商標)をはじめとする道路交通情報に限定さない。車線変更を要する道路特定部に係る規制内容及び位置の情報を含んでさえいれば、いかなる形態の情報であってもよい。
【0036】
地図データ読出部55は、自車位置検出部51で検出された自車位置に基づいて生成される読出指令に従って、HDD21から所要の地図データを読み出してバッファメモリ31に記憶させる。車速検出部57は、距離センサ29bから出力された移動距離データを時間微分することにより、時々刻々と変化する自車両の走行速度を検出する。
【0037】
道路特定部判定部59は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、地図データ読出部55によりバッファメモリ31から読み出される地図データとに基づいて、自車両が現に走行している現走道路の進行方向前方に道路特定部が存在するか否かを判定する。なお、誘導経路が存在しない場合の”現走道路”とは、自車両が右左折なしに直進を続けた場合に現に走行する道路をいう。誘導経路が存在する場合は、誘導経路に従う道路が”現走道路”となる。また、複数の車線を有する道路では、現在走行中の車線を”現走道路”とする。
【0038】
分岐路判定部61は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、バッファメモリ31に格納された地図データとに基づいて、道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在するか否かを判定する。ここで、”道路特定部の内方に分岐路が存在する”とは、道路特定部情報がリンクの付加情報として与えられており、道路特定部に係るリンクの区間(例えば、400mなど)内に分岐路が存在するケースを想定している。また、”道路特定部の近傍に分岐路が存在する”とは、道路特定部情報がノードの付加情報として与えられており、同ノードの近傍(例えば、同ノードを挟んで進行方向の前後各200m以内など)に分岐路が存在するケースを想定している。
【0039】
規制区間設定部63は、交通情報取得部53により取得した道路特定部に係るリンクを用いて、道路特定部を含む所定距離のマップマッチング規制区間を設定する。このマップマッチング規制区間の所定距離は、道路特定部に係るリンクの区間距離を基準として、この基準区間の前後に、後述の余裕代を必要に応じて付加することにより設定する。基準区間の前後に付加する余裕代は、予め定めた所定値を固定的に設定してもよいし、道路特定部に係るリンクの外方かつ近傍に他の分岐路が存在するか否かに基づいて可変設定してもよい。また、自車両の走行速度に基づいて可変設定してもよい。これらについては後述する。
【0040】
マップマッチング部65は、自律航法センサ29の出力信号に基づき自車位置検出部51により検出した自車位置と、バッファメモリ31に格納された地図データとに基づいて、地図画面上の該当する道路上に、自車位置を対応付けるマップマッチング動作を行う。具体的には、マップマッチング部65は、自律航法センサ29の出力信号に基づき検出した自車位置と、自車位置の周辺道路との間の相対位置関係に基づいて、検出した自車位置との間の相対距離が最も小さい道路を探索し、この探索によりヒットした道路上に、自車位置を対応付けるように動作する。なお、マップマッチング部65は、自律航法センサ29により検出した自車位置と周辺道路間の相対距離がある程度以上大きい場合は、必要に応じて、GPS受信機(不図示)により得られる自車両の絶対的な位置データを参照してもよい。
【0041】
マップマッチング動作制御部67は、自車位置検出部51により検出した自車位置と、バッファメモリ31に格納された自車位置周辺の地図データと、規制区間設定部63で設定される所定距離のマップマッチング規制区間とに基づいて、自車両がマップマッチング規制区間を走行中か否かを判断する。また、マップマッチング動作制御部67は、現走道路の進行方向前方に道路特定部が存在すると道路特定部判定部59により判定され、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路が存在すると分岐路判定部61により判定された場合であって、マップマッチング規制区間を自車両が走行中の場合、マップマッチング部65の動作を中止させる制御を行う。
【0042】
(マップマッチング動作制御に係る処理の流れ)
次に、本実施形態に係る車載用ナビゲーション装置11が行うマップマッチング動作制御に係る処理の流れについて、図面を参照して説明する。図4は、マップマッチング動作制御に係る処理の流れを示すフロー図、図5(A),(B),(C)は、自車位置とマップマッチング動作状態との関係を時系列的に表す説明図である。
【0043】
図4に示すステップS11において、自車位置検出部51は、自律航法センサ29により得られる自車両の相対的な位置データに基づいて、自車位置を検出する。ステップS12(”交通情報取得工程”に相当する)において、交通情報取得部53は、交通情報受信機25経由で受信した道路交通情報を取得する。本実施形態では、道路交通情報に含まれる道路特定部情報として、車線規制に係る情報を取得したとする。
【0044】
ステップS13(”道路特定部判定工程”に相当する)において、道路特定部判定部59は、自車位置検出部51により検出した自車位置と、交通情報取得部53で取得した道路交通情報に含まれる道路特定部情報(車線規制に係る情報)と、バッファメモリ31の地図データとに基づいて、現走道路の進行方向前方に道路特定部が存在するか否かを判定する。
【0045】
ステップS13の判定の結果、現走道路の進行方向前方に道路特定部が存在しない旨の判定が下された場合、制御部33は、処理の流れをステップS11に戻し、以下の処理を繰り返す。一方、ステップS13の判定の結果、現走道路の進行方向前方に道路特定部が存在する旨の判定が下された場合、ステップS14(”分岐路判定工程”に相当する)において、分岐路判定部61は、自車位置検出部51により検出した自車位置と、交通情報取得部53により取得した道路交通情報と、バッファメモリ31に格納された地図データとに基づいて、ステップS13によりその存在が確認された道路特定部の内方又は近傍に、現走道路から分岐する分岐路CR1が存在するか否かを判定する。
【0046】
ステップS14の判定の結果、道路特定部の内方又は近傍のいずれにも分岐路CR1が存在しない旨の判定が下された場合、制御部33は、処理の流れをステップS11に戻し、以下の処理を繰り返す。一方、ステップS14の判定の結果、道路特定部の内方又は近傍のいずれかに分岐路CR1が存在する旨の判定が下された場合、ステップS15において、規制区間設定部63は、交通情報取得部53により取得した道路特定部に係るリンクを用いて、道路特定部を丸ごと含む所定距離のマップマッチング規制区間RIを設定する。
【0047】
ステップS16において、マップマッチング動作制御部67は、ステップS11で自車位置検出部51により検出した自車位置と、バッファメモリ31の地図データと、ステップS15で規制区間設定部63により設定されたマップマッチング規制区間RIとに基づいて、自車両がマップマッチング規制区間RIを走行中か否かを判断する。ステップS16の判断は、自車両がマップマッチング規制区間RIに到達するまで繰り返される。自車両がマップマッチング規制区間RIに到達し、マップマッチング規制区間RIを走行中であると判断されると、ステップS17(”マップマッチング動作制御工程”に相当する)において、マップマッチング動作制御部67は、マップマッチング部65の動作を中止させる制御を行う。
【0048】
ステップS18において、マップマッチング動作制御部67は、ステップS11で自車位置検出部51により検出した自車位置と、バッファメモリ31の地図データと、ステップS15で規制区間設定部63により設定されたマップマッチング規制区間RIとに基づいて、自車両がマップマッチング規制区間RIを通り抜けたか否かを判断する。ステップS18の判断は、自車両がマップマッチング規制区間RIを通り抜けるまで繰り返される。
【0049】
自車両がマップマッチング規制区間RIを通り抜けたと判断されると、ステップS19において、マップマッチング動作制御部67は、マップマッチング部65の動作を再開させる制御を行う。つまり、マップマッチング動作制御部67は、マップマッチング部65の動作を中止させた後、自車両がマップマッチング規制区間RIを通り抜けた場合、マップマッチング部65の動作を再開させる。
【0050】
ここで、自車両の走行位置とマップマッチング動作状態との関係を、図5(A),(B),(C)に基づいて時系列的に説明する。前提として、3車線の主道路(道路特定部に係るリンクや車線毎のリンクを含む各種のリンク群が対応付けられている)LAに併走する側道(主道路と同様に、各種のリンク群が対応付けられている)LBがあり、主道路LAと側道LBとを結ぶ分岐路CR1が存在するものとする。主道路LAを走行中の自車両の進行方向前方に道路特定部(例えば車線規制された区間)が存在し、かつ、この道路特定部の内方又は近傍に分岐路CR1が存在するものとする。そして、道路特定部を丸ごと含む所定距離のマップマッチング規制区間RIが設定されているものとする。
【0051】
図5(A)に示すように、主道路LAのうち最も右側の車線を走行中に、車線規制に遭遇した自車両は、その走行車線を左側に移動させる。この移動方向の先には分岐路CR1がある。仮に、自車両に搭載された車載用ナビゲーション装置11が通常通りのマップマッチング動作を実行すると、自車位置が側道LBに引き付けられて、自車位置のミスマッチを生じるおそれがある。
【0052】
これに対して、本実施形態の場合、マップマッチング規制区間RIに到達した自車両の車載用ナビゲーション装置11では、図5(B)に示すように、マップマッチング動作が中止される。このため、自車両の移動方向の先に分岐路CR1が存在するにもかかわらず、自車位置が側道LBに引き付けられることはない。従って、自車位置の側道LBへのミスマッチを未然に回避することができる。
【0053】
マップマッチング規制区間RIを通り抜けた自車両の車載用ナビゲーション装置11では、図5(C)に示すように、マップマッチング動作が再開される。これにより、自車両が主道路LAのうち最も右側の車線に戻れば、この最も右側の車線に自車位置が速やかに引き付けられて、迅速かつ適切なタイミングをもってマップマッチング動作を実現することができる。
【0054】
要するに、分岐路CR1が近傍に存在するマップマッチング規制区間RIを走行中に車線変更を行った場合には、マップマッチング動作は行われない。このため、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路LAに側道LBが併走しており、主道路LAと側道LBとを接続する分岐路CR1が存在し、かつ、主道路LAのうち分岐路CR1の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【0055】
(マップマッチング規制区間の設定例)
前述したマップマッチング規制区間RIの設定例は、大きく分けて三つある。これらについて図面を参照して説明する。
図6(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図、図7(A),(B),(C)は、ノードに対して道路特定部情報が付加されている場合の第1のマップマッチング規制区間の設定例に係る説明図、図8(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第2のマップマッチング規制区間の設定例に係る説明図、図9(A),(B),(C)は、リンクに対して道路特定部情報が付加されている場合の第3のマップマッチング規制区間の設定例に係る説明図である。
【0056】
はじめに、リンクに対して道路特定部情報が付加されている場合の、第1のマップマッチング規制区間の設定例について説明する。第1のマップマッチング規制区間の設定例では、例えば図6(A)に示すように、ノードn1,n2間を結ぶリンクLKn1_n2(リンク区間距離;L0)で表される道路特定部に対し、その進行方向前後に第1及び第2の余裕代L1,L2をそれぞれ付加して、所定距離L_RIのマップマッチング規制区間RIを設定する。
【0057】
本例では、仮に、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであるとする。この場合、図6(A),(B),(C)に示すように、例えば、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0058】
道路特定部に係るリンクLKn1_n2とは、具体的には、例えば車線規制によって車線変更を要する道路区間である。この道路区間は、ひとつのリンクからなるものであってもよいし、相互に隣接する複数のリンクの集合からなるものであってもよい。道路特定部に係るリンクLKn1_n2を挟む前後の道路区間では、特段の車線変更を要しない通常の道路区間と比べて、車線変更が頻発することが多い。かかる道路区間では、通常の道路区間と比べて、自車位置のミスマッチを生じる蓋然性が高い。そこで、道路特定部に係るリンクLKn1_n2に対し、その進行方向前後に第1及び第2の余裕代L1,L2をそれぞれ付加する。これにより、前述した自車位置のミスマッチを抑制する。
【0059】
ただし、前述した第1及び第2の余裕代L1,L2は、本発明に係る必須の構成要素ではない。いずれか一方のみとしてもよいし、これらの値を”0”とすることもできる。第1及び第2の余裕代L1,L2を省略した場合、道路特定部に係るリンクLKn1_n2の区間距離L0は、マップマッチング規制区間RIの所定距離L_RIと等しくなる。位置及び距離の点で、両者はぴったりと重なり合う。また、第1及び第2の余裕代L1,L2は、それぞれを適宜の独立値としてもよい。要するに、マップマッチング規制区間RIは、道路特定部に係るリンクLKn1_n2を位置及び距離の観点から包含しさえすれば、いかなる長さに設定してもよい。
【0060】
このように、マップマッチング規制区間RIの設定に際し、道路特定部に係るリンクLKn1_n2を位置及び距離の観点から包含すべき旨の条件を課したのは、マップマッチング規制区間RIを外れて道路特定部が存在するようなケースを排除して、自車位置のミスマッチ抑止効果を適確に高めるためである。
【0061】
次に、ノードに対して道路特定部情報が付加されている場合の、第1のマップマッチング規制区間の設定例について説明する。本例では、図7(A)に示すように、ノードn1とノードn3の中間に位置するノードn2に対し、道路特定部情報が付加されているものとする。この場合、図7(A),(B),(C)に示すように、例えば、ノードn2を挟んで進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ200mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0062】
なお、前述した第1及び第2の余裕代L1,L2は、それぞれを適宜の独立値に設定してもよい。要するに、マップマッチング規制区間RIの所定距離L_RIは、車載用ナビゲーション装置11側において、任意の値に設定することができる。また、ノードに付加される道路特定部情報のなかに、第1及び第2の余裕代L1,L2を含ませる構成を採用してもよい。
【0063】
ところで、例えば図5(C)に示すように、分岐路CR1(マップマッチング規制区間RI内にある)の直後に、他の分岐路CR2(マップマッチング規制区間RI外にある)が存在するような複雑な道路環境では、運転者は、他の分岐路CR2を通り抜ける前までの短時間で自車両の進行方向を瞬時に判断しなければならない。こうしたケースにおいて、地図画面上の自車位置を迅速かつ適時に提示することができれば、ユーザーの利便性が高まる。
【0064】
こうした観点から、第2のマップマッチング規制区間の設定例では、道路特定部(ただし、リンクの形態に限る)の外方かつ近傍に他の分岐路CR2が存在するか否かに基づいて、マップマッチング規制区間RIの所定距離L_RIを可変設定することとした。ここで、他の分岐路CR2が存在しない通常時では、図6の例と同様に、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加して、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0065】
一方、他の分岐路CR2が存在する場合は、マップマッチング規制区間RIの所定距離L_RIを、他の分岐路CR2が存在しない通常時よりも短く設定する。例えば、図8(A)に示すように、仮に、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであり、かつ、同リンクLKn1_n2の内方(マップマッチング規制区間RI内)に分岐路CR1が存在し、その外方かつ近傍(マップマッチング規制区間RI外)に他の分岐路CR2が存在するものとする。
【0066】
この場合は、図8(A),(B)に示すように、第2の余裕代L2を、他の分岐路CR2が存在しない通常時(100m)と比べて短く設定する。要するに、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を100mだけ付加すると共に、前方側に第2の余裕代L2を通常時(100m)と比べて短い距離(例えば50m)だけ付加する。これにより、都合400m未満300m以上(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0067】
第2のマップマッチング規制区間の設定例では、道路特定部に係るリンクの外方かつ近傍に他の分岐路CR2が存在する場合、マップマッチング規制区間RIの所定距離L_RIを、道路特定部に係るリンクの外方かつ近傍に他の分岐路CR2が存在しない通常時と比べて短く設定する。このため、他の分岐路CR2が存在しない通常時と比べて、マップマッチング規制区間RIを通り抜けた後に、地図画面上の自車位置を該当する道路へと迅速かつ適時に対応付けることができる。従って、例えば、分岐路CR1の直後に他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、ユーザーの利便性を向上させることができる。
【0068】
ところで、車両が車線変更を行う際に要する走行距離は、一般に、車速が増すにつれて長くなる。かかる知見に基づき、本発明者は、マップマッチング規制区間RIの所定距離L_RIを自車両の走行速度に基づいて可変設定すれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作制御を実行することができることに気づいた。かかる発想をもとに、第3のマップマッチング規制区間の設定例では、自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを可変設定することとした。
【0069】
自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを演算するには、一定の時間を要する。この時間を確保するため、自車両の走行速度のサンプリングポイントとしては、自車両がマップマッチング規制区間RIに到達する前の地点(例えば、道路特定部に対して進行方向で500m手前側の地点など)を適宜採用するのが好ましい。
【0070】
具体的には、道路特定部に係るリンクLKn1_n2の区間距離L0が200mであるとする。この場合において、例えば、自車両の走行速度が時速30kmと低速の場合、図9(A)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ100mずつ付加する。これにより、都合400m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0071】
また、例えば、自車両の走行速度が時速55kmと中速の場合、図9(B)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ200mずつ付加する。これにより、都合600m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0072】
そして、例えば、自車両の走行速度が時速80kmと高速の場合には、図9(C)に示すように、道路特定部に係るリンクLKn1_n2に対し、進行方向の後方側に第1の余裕代L1を、前方側に第2の余裕代L2をそれぞれ300mずつ付加する。これにより、都合800m(所定距離L_RI)のマップマッチング規制区間RIを設定する。
【0073】
なお、自車両の走行速度に基づいてマップマッチング規制区間RIの所定距離L_RIを可変設定するに際しては、例えば、自車両の速度範囲のバリエーション(例えば、時速0〜35km、時速35〜70km、時速70〜105kmなど)に対応付けて第1及び第2の余裕代L1,L2の値をそれぞれ割り当てるテーブルルックアップ方式を採用してもよい。また、自車両の走行速度をパラメータとして含む所定の計算式を用いて第1及び第2の余裕代L1,L2の値を逐次求める逐次計算方式を採用してもよい。
【0074】
第3のマップマッチング規制区間の設定例では、自車両の走行速度に基づいて、マップマッチング規制区間RIの所定距離L_RIを可変設定することとした。第3のマップマッチング規制区間の設定例によれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作の制御を実行することができる。
【0075】
以上説明したように、本実施形態に係る車載用ナビゲーション装置11によれば、マップマッチング動作制御部67は、現走道路の進行方向前方に道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路CR1が存在する場合であって、自車両がマップマッチング規制区間RIを走行中の場合、マップマッチング部65の動作を中止させる制御を行うこととした。
【0076】
これにより、分岐路CR1が近傍に存在するマップマッチング規制区間RIを走行中に車線変更を行った場合には、マップマッチング動作は行われない。このため、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することはない。従って、主道路と側道とが併走しており、主道路と側道とを接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍に車線変更を要する道路特定部が存在するケースであっても、自車位置のミスマッチを未然に回避することができる。
【0077】
また、本実施形態に係る車載用ナビゲーション装置11によれば、規制区間設定部63の働きによって、マップマッチング規制区間RIの可変設定を簡易に実現することができる。
【0078】
例えば、道路特定部に係るリンクの外方かつ近傍にも他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、規制区間設定部65は、マップマッチング規制区間RIの所定距離L_RIを、他の分岐路CR2が存在しない通常時と比べて短く設定する。このため、自車両がマップマッチング規制区間RIを通り抜けた後に、速やかにマップマッチング動作を再開させることができる。従って、例えば、分岐路CR1の直後に他の分岐路CR2が存在するような複雑な道路環境を走行中の場合に、ユーザーの利便性を向上させることができる。
【0079】
または、規制区間設定部65は、車速検出部57の車速検出結果に基づいて所定距離L_RIを可変設定するようにしている。このように構成すれば、自車両の走行環境に即した適切なタイミングをもってマップマッチング動作の制御を実行することができる。
【0080】
なお、本実施形態は、何れも本発明を実施するにあたっての具体化の一例を示したものに過ぎない。このため、これによって本発明の技術的範囲が限定的に解釈されてはならない。すなわち、本発明はその要旨またはその主要な特徴から逸脱することなく、様々な形態で実施することができる。
【符号の説明】
【0081】
11 車載用ナビゲーション装置
33 制御部
51 自車位置検出部
53 交通情報取得部
55 地図データ読出部
57 車速検出部
59 道路特定部判定部
61 分岐路判定部
63 規制区間設定部
65 マップマッチング部
67 マップマッチング動作制御部
【特許請求の範囲】
【請求項1】
自車両の現在位置を検出する自車位置検出部と、
車線変更を要する道路特定部に係る道路特定部情報を含む交通情報を取得する交通情報取得部と、
前記自車位置検出部により検出した自車両の現在位置を地図画面上の該当する道路に対応付けるマップマッチング動作を行うマップマッチング部と、
前記交通情報取得部により取得した前記道路特定部情報を含む交通情報に基づいて、前記自車両が現に走行している現走道路の進行方向前方に前記道路特定部が存在するか否かを判定する道路特定部判定部と、
前記道路特定部の内方又は近傍に前記現走道路から分岐する分岐路が存在するか否かを判定する分岐路判定部と、
前記道路特定部判定部により前記現走道路の進行方向前方に前記道路特定部が存在すると判定され、かつ、前記分岐路判定部により前記道路特定部の内方又は近傍に前記分岐路が存在すると判定された場合であって、前記現走道路のうち前記道路特定部を含む所定距離のマップマッチング規制区間を前記自車両が走行中の場合、前記マップマッチング部の動作を中止させる制御を行うマップマッチング動作制御部と、
を備えたことを特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置であって、
前記道路特定部情報は、前記道路特定部に係るリンクに関連付けて付加され、
前記道路特定部に係るリンクを用いて、前記所定距離のマップマッチング規制区間を設定する規制区間設定部を備えた、
ことを特徴とする車載用ナビゲーション装置。
【請求項3】
請求項2に記載の車載用ナビゲーション装置であって、
前記分岐路判定部により前記道路特定部の外方かつ近傍に他の分岐路が存在すると判定された場合、前記規制区間設定部は、前記マップマッチング規制区間の所定距離を、前記道路特定部の外方かつ近傍に他の分岐路が存在しない通常時と比べて短く設定する、
ことを特徴とする車載用ナビゲーション装置。
【請求項4】
請求項2に記載の車載用ナビゲーション装置であって、
前記自車両の速度を検出する車速検出部を備え、
前記規制区間設定部は、前記車速検出部の車速検出結果に基づいて前記マップマッチング規制区間の所定距離を可変設定する、
ことを特徴とする車載用ナビゲーション装置。
【請求項5】
自車両の現在位置を検出し地図画面上の該当する道路に対応付けるマップマッチング動作を行う際に用いられるマップマッチング動作制御方法であって、
車線変更を要する道路特定部に係る道路特定部情報を含む交通情報を取得する道路交通情報取得工程と、
前記道路交通情報取得工程により取得した前記道路特定部情報を含む交通情報に基づいて、前記自車両が現に走行している現走道路の進行方向前方に前記道路特定部が存在するか否かを判定する道路特定部判定工程と、
前記道路特定部の内方又は近傍に前記現走道路から分岐する分岐路が存在するか否かを判定する分岐路判定工程と、
前記道路特定部判定工程により前記現走道路の進行方向前方に前記道路特定部が存在すると判定され、かつ、前記分岐路判定工程により前記道路特定部の内方又は近傍に前記分岐路が存在すると判定された場合であって、前記現走道路のうち前記道路特定部を含む所定距離のマップマッチング規制区間を前記自車両が走行中の場合、前記マップマッチング動作を中止させる制御を行うマップマッチング動作制御工程と、
を備えたことを特徴とするマップマッチング動作制御方法。
【請求項1】
自車両の現在位置を検出する自車位置検出部と、
車線変更を要する道路特定部に係る道路特定部情報を含む交通情報を取得する交通情報取得部と、
前記自車位置検出部により検出した自車両の現在位置を地図画面上の該当する道路に対応付けるマップマッチング動作を行うマップマッチング部と、
前記交通情報取得部により取得した前記道路特定部情報を含む交通情報に基づいて、前記自車両が現に走行している現走道路の進行方向前方に前記道路特定部が存在するか否かを判定する道路特定部判定部と、
前記道路特定部の内方又は近傍に前記現走道路から分岐する分岐路が存在するか否かを判定する分岐路判定部と、
前記道路特定部判定部により前記現走道路の進行方向前方に前記道路特定部が存在すると判定され、かつ、前記分岐路判定部により前記道路特定部の内方又は近傍に前記分岐路が存在すると判定された場合であって、前記現走道路のうち前記道路特定部を含む所定距離のマップマッチング規制区間を前記自車両が走行中の場合、前記マップマッチング部の動作を中止させる制御を行うマップマッチング動作制御部と、
を備えたことを特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置であって、
前記道路特定部情報は、前記道路特定部に係るリンクに関連付けて付加され、
前記道路特定部に係るリンクを用いて、前記所定距離のマップマッチング規制区間を設定する規制区間設定部を備えた、
ことを特徴とする車載用ナビゲーション装置。
【請求項3】
請求項2に記載の車載用ナビゲーション装置であって、
前記分岐路判定部により前記道路特定部の外方かつ近傍に他の分岐路が存在すると判定された場合、前記規制区間設定部は、前記マップマッチング規制区間の所定距離を、前記道路特定部の外方かつ近傍に他の分岐路が存在しない通常時と比べて短く設定する、
ことを特徴とする車載用ナビゲーション装置。
【請求項4】
請求項2に記載の車載用ナビゲーション装置であって、
前記自車両の速度を検出する車速検出部を備え、
前記規制区間設定部は、前記車速検出部の車速検出結果に基づいて前記マップマッチング規制区間の所定距離を可変設定する、
ことを特徴とする車載用ナビゲーション装置。
【請求項5】
自車両の現在位置を検出し地図画面上の該当する道路に対応付けるマップマッチング動作を行う際に用いられるマップマッチング動作制御方法であって、
車線変更を要する道路特定部に係る道路特定部情報を含む交通情報を取得する道路交通情報取得工程と、
前記道路交通情報取得工程により取得した前記道路特定部情報を含む交通情報に基づいて、前記自車両が現に走行している現走道路の進行方向前方に前記道路特定部が存在するか否かを判定する道路特定部判定工程と、
前記道路特定部の内方又は近傍に前記現走道路から分岐する分岐路が存在するか否かを判定する分岐路判定工程と、
前記道路特定部判定工程により前記現走道路の進行方向前方に前記道路特定部が存在すると判定され、かつ、前記分岐路判定工程により前記道路特定部の内方又は近傍に前記分岐路が存在すると判定された場合であって、前記現走道路のうち前記道路特定部を含む所定距離のマップマッチング規制区間を前記自車両が走行中の場合、前記マップマッチング動作を中止させる制御を行うマップマッチング動作制御工程と、
を備えたことを特徴とするマップマッチング動作制御方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−18132(P2012−18132A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−157001(P2010−157001)
【出願日】平成22年7月9日(2010.7.9)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月9日(2010.7.9)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]