
車載用ナビゲーション装置及びプログラム
【課題】地図データを退避するために大容量の専用メモリを確保することなく、必要な範囲の地図データを限られた記憶容量の範囲内で記憶することで、高高地におけるハードディスクドライブ(HDD)の保護と、車載用ナビゲーション装置の機能維持とを可能にする。
【解決手段】現在位置が、低地から高高地へ遷移する遷移地に該当する判定された場合(S120:遷移地)、この遷移先の高高地の全域を含む範囲の地図データがワークメモリの記憶容量の範囲内で記憶可能となる縮尺精度を特定する(S150)。そして、この特定した縮尺精度に対応する地図データであって、当該高高地の全域を含む範囲の地図データをHDDからワークメモリへ読み込む(S160)。その後、現在位置が高高地であると判定されている間(S120:高高地)、HDDを停止した状態で、ワークメモリに記憶されている地図データに基づいて地図表示を行う(S190)。
【解決手段】現在位置が、低地から高高地へ遷移する遷移地に該当する判定された場合(S120:遷移地)、この遷移先の高高地の全域を含む範囲の地図データがワークメモリの記憶容量の範囲内で記憶可能となる縮尺精度を特定する(S150)。そして、この特定した縮尺精度に対応する地図データであって、当該高高地の全域を含む範囲の地図データをHDDからワークメモリへ読み込む(S160)。その後、現在位置が高高地であると判定されている間(S120:高高地)、HDDを停止した状態で、ワークメモリに記憶されている地図データに基づいて地図表示を行う(S190)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハードディスクドライブを有する車載用ナビゲーション装置に関し、特に、標高の高い地域でのハードディスクドライブへのアクセス制御に関する。
【背景技術】
【0002】
従来、地図データに基づいて現在位置周辺の地図をディスプレイに表示したり、目的地までの最適な経路を計算して走行案内を行う車載用ナビゲーション装置等の車載装置において、地図データ等を記憶するための記憶媒体としてハードディスクドライブを用いたものが広く普及している。また、ハードディスクドライブの大量な記憶容量を利用して、地図データだけでなく、車載用ナビゲーション装置が作動するためのアプリケーションソフトウェアや、車載用ナビゲーション装置に一体化されたオーディオ機能で利用するための音楽データや映像データ等をハードディスクドライブに記憶させるものがある。
【0003】
ハードディスクドライブは、磁性体を塗布した記憶媒体であるディスクに磁気ヘッドを用いて情報を記録又は読み出す記憶装置である。ハードディスクドライブの作動時においては、高速で回転するディスクと共に回転する空気の圧力によってディスク上方に位置する磁気ヘッドがディスクから極わずかだけ浮き上がる構造となっている。よって、周辺の気圧が著しく低下している環境下でハードディスクドライブが作動すると、磁気ヘッドを浮上させる空気圧の低下によりディスクと磁気ヘッドとの間隔を適正な状態に維持できなくなる。その結果、ディスクと磁気ヘッドが衝突することでディスクを損傷してしまうおそれがある。そして、気圧は高度が上昇するにつれて低下するため、ハードディスクドライブには高度による使用限界がある。一般的には、ハードディスクドライブの高度に対する動作保証は、高度3000m(約0.7気圧)〜5000m(約0.5気圧)程度までとなっている。
【0004】
したがって、ハードディスクドライブを搭載した車載装置においては、ハードディスクドライブの作動が保証されている高度を超えるような高高地(例えば、3000m級、あるいは4000〜5000m級の道路)での使用が想定される場合、ハードディスクドライブの破損を防止するための対策が必要となる。
【0005】
そこで、車両が所定の高度(例えば3000m)以上に到達したときに、ハードディスクドライブに記憶されている地図データの一部を外部メモリに記憶した後、ハードディスクドライブを停止し、3000m以上の高高地を走行中には外部メモリに記憶されている地図データに基づいて経路案内を行う技術が案出されている(例えば、特許文献1参照)。このような技術により、高高地においてハードディスクドライブを停止させることでハードディスクドライブの破損を防止しながらも、経路案内を継続可能にすることを実現している。
【特許文献1】特開2004−317385号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
高高地においてハードディスクドライブに記憶されている地図データを外部メモリに退避する場合、地図データを退避するための専用のメモリを確保する必要がある。しかしながら、近年、地図データにはより多くの情報が含まれるようになり、提供される情報の精度が高くなった反面、そのデータ量は増加している。また、高高度でハードディスクドライブを停止している最中に、外部メモリに記憶した地図データだけで十分な範囲の地図を表示するためには、それなりに広範囲の地図データを退避させておく必要がある。
【0007】
したがって、高精度でかつ広範囲の地図データを退避用のメモリに記憶させる場合、この退避用の外部メモリには、それに見合った大容量のメモリを用いる必要があり、製品コストが高くなるという問題がある。
【0008】
本発明は、上記の問題を解決するためになされており、地図データを退避するために大容量の専用メモリを確保することなく、必要な範囲の地図データを限られた記憶容量の範囲内で記憶することで、高高地におけるハードディスクドライブの保護と、車載用ナビゲーション装置の機能維持とを可能にするための技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記問題を達成するためになされた請求項1に記載の車載用ナビゲーション装置は、次のような特徴を有する。
複数の縮尺精度の地図からなる階層構造を有する地図データを記憶するハードディスクドライブを外部記憶装置として備え、このハードディスクドライブから読み出した地図データに基づいて地図の表示を行う車載用ナビゲーション装置において、記憶手段と、高度検知手段、データ制御手段と、表示制御手段とを備える。
【0010】
記憶手段は、当該車載用ナビゲーション装置に用いられるコンピュータの作業用メモリであって、所定の記憶容量の範囲内でハードディスクドライブに記憶されている地図データの一部を記憶する。高度検知手段は、現在位置が所定の高度以上の地域を含む高高地であるか、高高地でないエリアから高高地へと遷移する遷移地であるかを検知する。
【0011】
データ制御手段は、高度検知手段により現在位置が遷移地であると検知された場合、この遷移先の連続する高高地の全域を少なくとも含む範囲の地図データが記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を前記複数の縮尺精度の中から特定する。そして、この特定した縮尺精度に対応する地図データであって、当該高高地の全域を含む範囲の地図データをハードディスクドライブから読み出し、これを記憶手段に記録する。表示制御手段は、高度検出手段により現在位置が高高地であると検知されている間、ハードディスクドライブを停止した状態で記憶手段から読み出した地図データに基づいて地図表示を行う。
【0012】
なお、ここでいう所定の高高度とは、例えばハードディスクドライブの作動が保証されている高度の上限値、あるいは、ハードディスクドライブの作動が保証される気圧の下限値に到達する高度とすることが考えられる。
【0013】
このように構成された車載用ナビゲーション装置によれば、低地から高高地へと遷移するタイミングで地図データの一部をコンピュータの作業用メモリに記憶し、高高地においては作業用メモリに記憶した地図データに基づいて地図の表示を行うことで、高高地におけるハードディスクドライブの保護と、車載用ナビゲーション装置の機能維持とを実現できる。このとき、ハードディスクドライブからの地図データの退避に作業用メモリを用いることで、地図データを退避するために大容量の専用メモリを確保する必要がない。よって、製品コストの増加を抑えることができる。
【0014】
また、作業用メモリに地図データを読み込む際、遷移先の高高地全域を含む範囲の地図データであって、この範囲の地図データが作業用メモリの限られた記憶容量に収まるように縮尺精度が設定される。そして、この設定された縮尺精度による高高地全域の地図データが記憶される。これにより、作業メモリの記憶容量の大小に依らず、高高地内でハードディスクドライブが停止している間は、当該高高地の全域の地図の表示を継続させることができる。
【0015】
複数の縮尺精度の地図からなる階層構造を有する地図データは、一般に縮尺精度が大きいほど地図がより詳細に描画されるため、地理的面積あたりのデータ量が大きくなる。そこで、例えば、ある縮尺精度においては、遷移先の高高地の全域を含む範囲の地図データが作業用メモリの記憶容量に収まらない場合、その縮尺精度よりも更に縮尺精度を小さくして、高高地エリア全域を含む範囲の地図データが作業用メモリの記憶容量に収まるようにすればよい。
【0016】
ところで、車載用ナビゲーション装置において、現在位置から目的地までの経路が設定されている場合、車両はその経路に沿って走行すると予想される。したがって、高高地でハードディスクドライブが停止している間は、この目的地までの経路に沿った範囲の地図を表示できる程度の地図データを作業用メモリに記憶させておけば、この作業メモリに記憶した地図データによって当該高高地内で車両が通過すると予想される範囲を補うことができると考えられる。
【0017】
そこで、請求項2に記載のように構成するとよい。すなわち、データ制御手段は、高度検知手段により現在位置が遷移地であると検知された場合、目的地までの経路が設定されていれば、遷移先の連続する高高地内を通る当該経路を少なくとも含む範囲の地図データが記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を特定する。そして、この特定した縮尺精度に対応する地図データであって当該高高地を通る当該経路を少なくとも含む範囲の地図データをハードディスクドライブから読み出し、これを記憶手段に記録する。
【0018】
このようにすることで、高高地において作業用メモリに記憶させる地図データを、目的地までの経路を含む範囲に限定することができる。つまり、作業用メモリに記憶させるべき地図の範囲が経路の通る範囲に限定されて小さくければ、その分縮尺精度が大きい詳細な地図を記憶させることができるようになる。よって、ハードディスクドライブ停止中であっても、より縮尺精度の大きい詳細な地図を表示できるようになり、高高地における地図表示の利便性が向上する。
【0019】
以上で説明したような車載用ナビゲーション装置におけるデータ制御手段及び表示制御手段をコンピュータシステムで実現するには、請求項3に記載のようにコンピュータシステム上で稼動するプログラムとして備えればよい。このようなプログラムは、例えば磁気/光/光磁気ディスク、ハードディスク、ROM、RAM等のコンピュータにて読取可能な記憶媒体に記録し、必要に応じてコンピュータにロードすることにより、上記各手段としての機能を実現できる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の一実施形態を図面に基づいて説明する。
[1.車載用ナビゲーション装置の構成の説明]
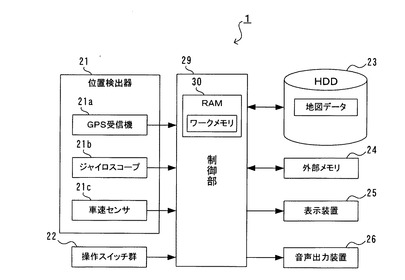
図1は、実施形態の車載用ナビゲーション装置1の概略構成を示すブロック図である。
【0021】
図1に示すように、車載用ナビゲーション装置1は、車両の現在位置を検出する位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データやプログラム等を記憶する大容量記憶装置であるハードディスクドライブ(HDD)23と、各種情報を記憶する外部メモリ24と、地図表示画面等の各種表示を行うための表示装置25と、各種のガイド音声等を出力するための音声出力装置26と、制御部29とを備えている。
【0022】
位置検出器21は、GPS用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の速度に応じた検出信号を出力する車速センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0023】
操作スイッチ群22は、表示装置25と一体に構成され表示面上に設置されるタッチパネル及び表示装置25の周囲に設けられたメカニカルなキースイッチ等が用いられる。
ハードディスクドライブ23は、情報を記憶するハードディスクと、ハードディスクに対して情報を読み書きするための磁気ヘッド、駆動部、制御部等からなるコントローラとが一体となった記憶装置である。ハードディスクドライブ23は、制御部29からの制御に基づいてハードディスクからデータを読み出し、これを制御部29へ入力する。ハードディスクドライブ23が記憶しているデータは、マップマッチング、経路探索、経路誘導等に用いる道路データ、地図表示に必要な各種データからなる描画データ等からなる地図データや、経路案内用データ、車載用ナビゲーション装置1の作動のためのプログラム等を含む各種データである。なお、このハードディスクドライブ23は、高度5000m以下、又は0.5気圧以上での使用環境において正常な作動が保証されているものと想定する。
【0024】
外部メモリ24は、後述の経路案内処理において算出された現在位置から目的地までの経路等の各種情報を記憶するためのものであり、その記憶内容は車両側から供給される電源によって保持される。
【0025】
表示装置25は、液晶ディスプレイ等の表示面を有するカラー表示装置である。表示装置25は、制御部29からの映像信号の入力に応じて各種画像を表示面に表示可能である。例えば、車両が走行中においては、ナビゲーション画面として位置検出器21にて検出した車両の現在位置とハードディスクドライブ23等から入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種ランドマークのシンボル等の付加データとが重ねて表示される。
【0026】
音声出力装置26は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示装置25による表示と音声出力装置26からの音声出力との両方でユーザに対してルート案内等の各種案内をすることができる。
【0027】
制御部29は、CPU,ROM,CPUによる作業用のデータを記憶するためのワークメモリを含むRAM30,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMやハードディスクドライブ23、外部メモリ24等から読み込んだプログラムや各種データに従って種々の処理を実行する。
【0028】
例えば、ナビゲーション関係の処理としては、地図表示処理や経路案内処理等が挙げられる。地図表示処理は、位置検出器21からの各検出信号に基づいて車両の現在位置を算出し、ハードディスクドライブ23から読み込んだ地図データに基づいて現在位置付近の地図等を表示装置25に表示する処理である。
【0029】
ここで一旦、ハードディスクドライブ23に記憶されている地図データについて、図2に基づき説明する。図2は、複数の縮尺精度の地図からなる階層構造を有する地図データの概要を模式的に示す説明図である。
【0030】
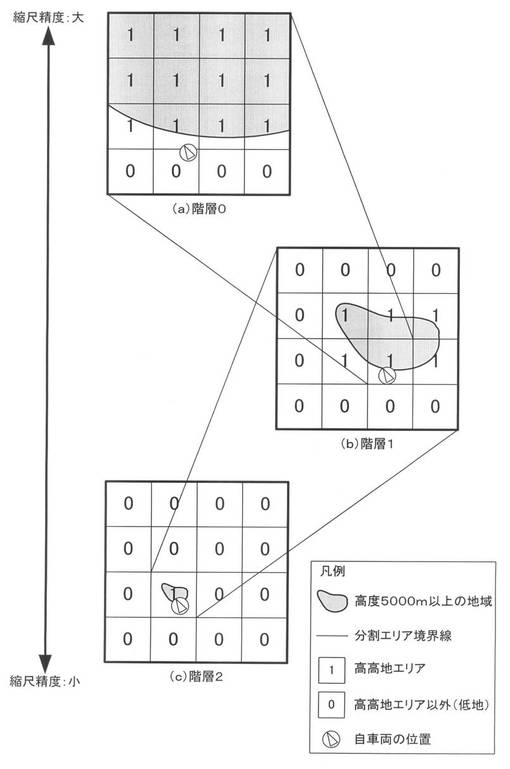
図2(a),(b),(c)に示すように、地図データは、縮尺精度の大きい方から順に、階層0,1,2…といった具合に、異なる複数縮尺精度の地図による階層構造を有している。各階層の地図データは、所定の等間隔の緯度・経度でメッシュ状に区切られた分割エリアごとの地図データの集合によって構成されている。そして、各階層において、縦横それぞれ4つ分、計16の分割エリアからなる範囲が、この階層から1つ縮尺精度の小さい(=広域)の階層における1つ分の分割エリアに相当するように定義されている。
【0031】
ハードディスクドライブ23の作動が制限されていない通常の状態において地図表示を行う場合、指定された縮尺精度に対応する階層の地図データのうち、自車両が存在する分割エリアと、その周辺の分割エリア(例えば、自車両が存在する分割エリアの周囲8箇所の分割エリア)の地図データをハードディスクドライブ23からRAM30のワークメモリに読み出し、この読み出した地図データに基づいて地図の表示を行っている。このようにすることで、表示中の地図画面からのスクロール先に相当する地図データもワークメモリに予め用意することができ、地図画面をスクロールした際にスクロール先の地図を表示できなくなるのを防いでいる。
【0032】
また、各分割エリアの地図データには、当該分割エリアが高高地エリアに該当するか否かを示す高度情報が付加されている。具体的には、ある分割エリアに高度5000m以上の地域が一部でも含まれる場合、高度情報として「1」の符号を割り当てることで、その分割エリアを高高地エリアと定義する。一方、分割エリア内に高度5000m以上の地域が含まれない場合、高度情報として「0」の符号を割り当てることで、その分割エリアを高高地エリアではない(低地)と定義する。
【0033】
さらに、高高地エリアと定義されている分割エリアの地図データには、当該分割エリアが属する階層から1つ縮尺精度の小さい(=広域)階層において当該分割エリアと同一地域に該当する広域の分割エリアへの参照先を示す情報が付加されている。
【0034】
図1の制御部29の説明に戻る。制御部29が実行する経路案内処理は、ハードディスクドライブ23に格納された地点データと、操作スイッチ群22等の操作に従って設定された目的地とに基づいて、現在位置から目的地までの最適な経路である目的地経路を算出し、現在位置と目的地経路との関係を考慮して目的までの走行案内を行う処理である。このように自動的に最適な経路を設定する手法として、ダイクストラ法によるコスト計算等の手法が知られている。
【0035】
また、車載用ナビゲーション装置1は、ハードディスクドライブ23の正常な作動が保証されている高度の上限(5000m)を超える地域での使用が想定されている。そのため、制御部29は、上述の高高地エリアに該当する地域に到達した場合、ハードディスクドライブ23の作動を禁止し、高度5000mを超える地域でハードディスクドライブ23を作動させることによる破損を防止する。
【0036】
さらに、制御部29は、本発明の特徴的な処理として、次のような「地図データ制御処理」を実行する。制御部29は、自車両の現在位置が低地から高度5000m以上の地域が含まれる高高地エリアへ遷移する際に、この遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データを、ハードディスクドライブ23からRAM30のワークメモリへ読み込み、高高地エリア内ではワークメモリに記憶されている地図データに基づいて地図表示を行う。なお、この「地図データ制御処理」の詳細な内容については後述する。
【0037】
以上、車載用ナビゲーション装置1の概略構成について説明したが、本実施形態における車載用ナビゲーション装置1の構成と特許請求の範囲に記載した構成との対応は次のとおりである。本実施形態における車載用ナビゲーション装置1のRAM30が、特許請求の範囲における記憶手段に相当する。また、位置検出器21及び制御部29が、高度検知手段に相当する。また、制御部29が、データ制御手段及び表示制御手段に相当する。
【0038】
[2.「地図データ制御処理」の説明]
以下、車載用ナビゲーション装置1の制御部29が実行する上述の「地図データ制御処理」の詳細な内容について説明する。
【0039】
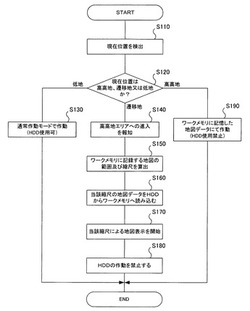
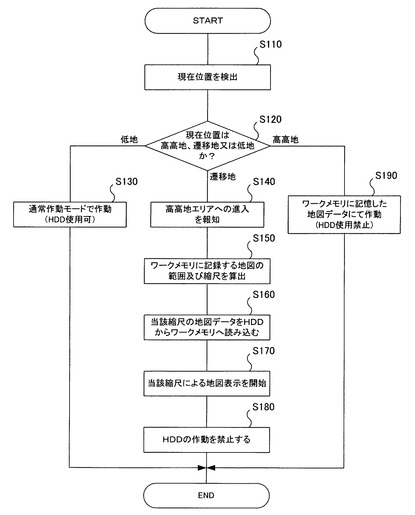
図3は、制御部29が実行する「地図データ制御処理」の手順を示すフローチャートである。この処理は、車両の走行中において上述の地図表示処理や経路案内処理等と並行して、所定時間ごとに繰り返し実行される。
【0040】
制御部29は、まず、位置検出器21からの入力信号に基づいて車両の現在位置を検出する(S110)。そして、この検出した現在位置が、高高地エリアに該当するか、高高地エリア以外の低地から高高地へリアへと遷移する遷移地に該当するか、高高地エリア以外の低地に該当するかを判定する(S120)。
【0041】
具体的には、ハードディスクドライブ23に記憶されている複数の縮尺精度の地図データのうち、最も縮尺精度の大きい階層(ここでは、図2(a)の階層0がこれに該当する)の地図データから、自車両が存在する分割エリア及びその周辺の8箇所の分割エリアに対応する高度情報を参照する。そして、自車両が存在する分割エリアの高度情報に高高地エリアであることを示す「1」の符号が割り当てられていれば、現在位置が高高地エリアであると判定する。また、自車両が存在する分割エリアの高度情報に低地であることを示す「0」の符号が割り当てられており、さらに、自車両が存在する分割エリアと、自車両の進行方向上にあって、この分割エリアに隣接する高高地エリアである分割エリアとの境界線上、あるいはこの境界線近傍に自車両が位置する場合、現在位置が遷移地であると判定する。また、自車両が存在する分割エリアの高度情報に低地エリアであることを示す「0」の符号が割り当てられており、上述の遷移地に該当しない場合、現在位置が低地であると判定する。
【0042】
なお、S120の処理を実行する際、ハードディスクドライブ23の作動が禁止されている状態であれば、RAM30のワークメモリに記憶されている地図データに含まれる高度情報に基づいて、現在位置が高高度エリアであるか否かを判定すればよい。あるいは、地図データに依らずに、GPS21aを介して受信したGPS衛星の電波信号に基づく三次元測位によって高度を取得し、これに基づいて現在位置が高高度エリアであるか否かを判定してもよい。
【0043】
S120で現在位置が低地に該当すると判定した場合(S120:低地)、ハードディスクドライブ23の作動を許可した状態で地図表示処理や経路案内処理等を行う通常作動モードでの作動を実行する(S130)。この通常作動モードにおいては、ハードディスクドライブ23へアクセスすることで、ハードディスクドライブ23に記憶されている地図データ等の各種データを読み出し、この読み出したデータに基づいて通常どおりに地図表示処理や経路案内処理等を実行する。
【0044】
一方、S120で現在位置が遷移地に該当すると判定した場合(S120:遷移地)、自車両が高高地エリアへ進入する旨のメッセージをユーザに対して報知する(S140)。メッセージの報知には、表示装置25によるメッセージ画像の表示や、音声出力装置26による音声メッセージの出力を用いればよい。また、高高地エリアへ進入するためハードディスクドライブ23を停止することをユーザへ通知するようにしてもよい。
【0045】
つぎに、制御部29は、RAM30のワークメモリへ記録すべき地図の範囲及び縮尺精度を算出する(S150)。具体的には、遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データであって、この範囲の地図データがワークメモリにおいて地図データを記憶可能な領域の記憶容量に収まるように縮尺精度を特定する。
【0046】
例えば、ワークメモリが、縮尺精度の異なるどの階層の地図データについても一度に分割エリア9つ分の地図データを記憶可能であると仮定する。このような場合、図2(a)の例に示す階層0の地図データ上では、自車両が進入しようとする高高地エリア全域が、9つ分の分割エリア内に収まっていない。つまり、この階層0の地図データでは、連続する高高地エリア全域の地図データをワークメモリに記憶させることはできない。そこで、この階層0の地図データ上において、遷移先の高高地エリアに該当する分割エリアに付されている参照先のデータに基づいて、この階層0から1つ縮尺精度の小さい(=広域)階層1の分割エリアの地図データを参照する。図2(b)の例に示す階層1の地図データ上では、自車両が進入しようとする高高地エリア全域が9つ分の分割エリア内に収まっている。つまり、この階層1の地図データならば、連続する高高地エリア全域を含む地図データをワークメモリに記憶させることができる。
【0047】
このようにして、ワークメモリに記憶させる地図データの縮尺精度として階層1に相当する縮尺精度が特定され、階層1の地図データの中から遷移先の高高地エリア全域及び自車両の現在位置を含む縦横3箇所分の計9つの分割エリアが、ワークメモリに記憶させるべき地図データの範囲に設定される。
【0048】
あるいは、現在位置から目的地までの経路が設定されており、この経路が外部メモリ24に記憶されている場合、遷移先の高高地エリアから連続する高高地エリア全域のうち、目的地までの経路が通る分割エリアを少なくとも含む範囲を、ワークメモリに記憶させるべき地図データの範囲として設定するようにしてもよい。このようにすることで、必ずしも連続する高高地エリア全域をワークメモリに記憶させる必要がなく、ワークメモリに記憶させるべき地図の範囲を低減できるため、その分より縮尺精度の大きい地図データをワークメモリに記憶させることができる。
【0049】
S150でワークメモリに記憶させる地図の範囲及び縮尺精度を算出した後、この算出した縮尺精度に該当する階層の地図データのうち、算出した範囲の分割エリアに該当する部分の地図データを、ハードディスクドライブ23からRAM30のワークメモリへ読み込む(S160)。そして、ワークメモリに読み込んだ地図データに基づき、この地図データに該当する縮尺精度による地図の表示を開始し(S170)、ハードディスクドライブ23の作動を禁止する(S180)。
【0050】
その後、S120で現在位置が高高地エリアに該当すると判定した場合(S120:高高地)、ハードディスクドライブ23の作動を禁止した状態で、ワークメモリに記憶されている地図データに基づく地図データの表示を行う(S190)。
【0051】
車両が高高地エリアを走行している間は、ハードディスクドライブ23の作動を禁止した状態が継続する。その間、ワークメモリに記憶されている地図データに基づく地図表示が行われる。この状態から高高地エリアから脱出したと判定されれば、ハードディスクドライブ23の作動が解禁され、ハードディスクドライブ23から読み込んだデータに基づいて作動する通常作動モードへ復帰する。
【0052】
[3.効果]
実施形態の車載用ナビゲーション装置によれば、以下のような効果を奏する。
(1)低地から高高地へと遷移するタイミングで地図データの一部をRAM30のワークメモリに記憶し、高高地においてはワークメモリに記憶した地図データに基づいて地図の表示を行うことで、高高地におけるハードディスクドライブ23の保護と、車載用ナビゲーション装置1の機能維持とを実現できる。このとき、ハードディスクドライブ23からの地図データの退避にワークメモリを用いることで、地図データを退避するために大容量の専用メモリを設置する必要がない。よって、製品コストの増加を抑えることができる。
【0053】
(2)遷移地においてワークメモリに地図データを読み込む際、遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データであって、この範囲の地図データがワークメモリにおいて地図データを記憶可能な領域の記憶容量に収まるように縮尺精度が設定される。そして、この設定された縮尺精度による高高地エリア全域の地図データが記憶される。このようにすることで、ワークメモリの記憶容量の大小に依らず、高高地エリア内でハードディスクドライブ23が停止している間は、当該高高地エリア全域の地図の表示を継続させることができる。
【0054】
(3)現在位置から目的地までの経路が設定されている場合、遷移先の高高地エリアから連続する高高地エリア全域のうち、目的地までの経路が通る分割エリアを少なくとも含む範囲を、ワークメモリに記憶させるべき範囲として設定することで、ワークメモリに記憶させるべき地図の範囲を低減できる。したがって、その分縮尺精度の大きい地図データをワークメモリに記憶させることができ、ハードディスクドライブ23が停止中であってもより詳細な地図を表示できるようになる。
【0055】
[4.別実施形態]
以上、本発明の実施形態について説明したが、本発明は上記の実施形態に何ら限定されるものではなく、様々な態様にて実施することが可能である。
【0056】
例えば、上記実施形態では、現在位置が高高地エリア、遷移地、低地の何れかに該当するかを判断する際(図3のS120参照)、地図データに含まれる高度情報に基づいて判定する構成となっているが、現在位置の高度を判定する方法はこれに限らない。例えば、GPS受信機21aによって受信したGPS衛星からの電波信号に基づく三次元測位により高度を測定し、その測定された高度に応じて高高地エリア、遷移地、低地の何れかに該当するかを判定してもよい。また、気圧センサ等により計測した気圧によって高度を特定するような構成であってもよい。
【0057】
あるいは、地図座標平面を所定の緯度及び経度でメッシュ状に区切ったエリアごとに、高高地、遷移地、低地を定義した高度判定用のテーブルデータを外部メモリ24等に格納しておき、この高度判定用のテーブルデータと現在位置の座標とを照らし合わせることで、高高地エリア、遷移地、低地の何れかに該当するかを判定してもよい。
【図面の簡単な説明】
【0058】
【図1】実施形態の車載用ナビゲーション装置1の概略構成を示す説明図である。
【図2】複数の縮尺精度の地図からなる階層構造を有する地図データの概要を模式的に示す説明図である。
【図3】「地図データ制御処理」の手順を示すフローチャートである。
【符号の説明】
【0059】
1…車載用ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…車速センサ、22…操作スイッチ群、23…ハードディスクドライブ、24…外部メモリ、25…表示装置、26…音声出力装置、29…制御部、30…RAM。
【技術分野】
【0001】
本発明は、ハードディスクドライブを有する車載用ナビゲーション装置に関し、特に、標高の高い地域でのハードディスクドライブへのアクセス制御に関する。
【背景技術】
【0002】
従来、地図データに基づいて現在位置周辺の地図をディスプレイに表示したり、目的地までの最適な経路を計算して走行案内を行う車載用ナビゲーション装置等の車載装置において、地図データ等を記憶するための記憶媒体としてハードディスクドライブを用いたものが広く普及している。また、ハードディスクドライブの大量な記憶容量を利用して、地図データだけでなく、車載用ナビゲーション装置が作動するためのアプリケーションソフトウェアや、車載用ナビゲーション装置に一体化されたオーディオ機能で利用するための音楽データや映像データ等をハードディスクドライブに記憶させるものがある。
【0003】
ハードディスクドライブは、磁性体を塗布した記憶媒体であるディスクに磁気ヘッドを用いて情報を記録又は読み出す記憶装置である。ハードディスクドライブの作動時においては、高速で回転するディスクと共に回転する空気の圧力によってディスク上方に位置する磁気ヘッドがディスクから極わずかだけ浮き上がる構造となっている。よって、周辺の気圧が著しく低下している環境下でハードディスクドライブが作動すると、磁気ヘッドを浮上させる空気圧の低下によりディスクと磁気ヘッドとの間隔を適正な状態に維持できなくなる。その結果、ディスクと磁気ヘッドが衝突することでディスクを損傷してしまうおそれがある。そして、気圧は高度が上昇するにつれて低下するため、ハードディスクドライブには高度による使用限界がある。一般的には、ハードディスクドライブの高度に対する動作保証は、高度3000m(約0.7気圧)〜5000m(約0.5気圧)程度までとなっている。
【0004】
したがって、ハードディスクドライブを搭載した車載装置においては、ハードディスクドライブの作動が保証されている高度を超えるような高高地(例えば、3000m級、あるいは4000〜5000m級の道路)での使用が想定される場合、ハードディスクドライブの破損を防止するための対策が必要となる。
【0005】
そこで、車両が所定の高度(例えば3000m)以上に到達したときに、ハードディスクドライブに記憶されている地図データの一部を外部メモリに記憶した後、ハードディスクドライブを停止し、3000m以上の高高地を走行中には外部メモリに記憶されている地図データに基づいて経路案内を行う技術が案出されている(例えば、特許文献1参照)。このような技術により、高高地においてハードディスクドライブを停止させることでハードディスクドライブの破損を防止しながらも、経路案内を継続可能にすることを実現している。
【特許文献1】特開2004−317385号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
高高地においてハードディスクドライブに記憶されている地図データを外部メモリに退避する場合、地図データを退避するための専用のメモリを確保する必要がある。しかしながら、近年、地図データにはより多くの情報が含まれるようになり、提供される情報の精度が高くなった反面、そのデータ量は増加している。また、高高度でハードディスクドライブを停止している最中に、外部メモリに記憶した地図データだけで十分な範囲の地図を表示するためには、それなりに広範囲の地図データを退避させておく必要がある。
【0007】
したがって、高精度でかつ広範囲の地図データを退避用のメモリに記憶させる場合、この退避用の外部メモリには、それに見合った大容量のメモリを用いる必要があり、製品コストが高くなるという問題がある。
【0008】
本発明は、上記の問題を解決するためになされており、地図データを退避するために大容量の専用メモリを確保することなく、必要な範囲の地図データを限られた記憶容量の範囲内で記憶することで、高高地におけるハードディスクドライブの保護と、車載用ナビゲーション装置の機能維持とを可能にするための技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記問題を達成するためになされた請求項1に記載の車載用ナビゲーション装置は、次のような特徴を有する。
複数の縮尺精度の地図からなる階層構造を有する地図データを記憶するハードディスクドライブを外部記憶装置として備え、このハードディスクドライブから読み出した地図データに基づいて地図の表示を行う車載用ナビゲーション装置において、記憶手段と、高度検知手段、データ制御手段と、表示制御手段とを備える。
【0010】
記憶手段は、当該車載用ナビゲーション装置に用いられるコンピュータの作業用メモリであって、所定の記憶容量の範囲内でハードディスクドライブに記憶されている地図データの一部を記憶する。高度検知手段は、現在位置が所定の高度以上の地域を含む高高地であるか、高高地でないエリアから高高地へと遷移する遷移地であるかを検知する。
【0011】
データ制御手段は、高度検知手段により現在位置が遷移地であると検知された場合、この遷移先の連続する高高地の全域を少なくとも含む範囲の地図データが記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を前記複数の縮尺精度の中から特定する。そして、この特定した縮尺精度に対応する地図データであって、当該高高地の全域を含む範囲の地図データをハードディスクドライブから読み出し、これを記憶手段に記録する。表示制御手段は、高度検出手段により現在位置が高高地であると検知されている間、ハードディスクドライブを停止した状態で記憶手段から読み出した地図データに基づいて地図表示を行う。
【0012】
なお、ここでいう所定の高高度とは、例えばハードディスクドライブの作動が保証されている高度の上限値、あるいは、ハードディスクドライブの作動が保証される気圧の下限値に到達する高度とすることが考えられる。
【0013】
このように構成された車載用ナビゲーション装置によれば、低地から高高地へと遷移するタイミングで地図データの一部をコンピュータの作業用メモリに記憶し、高高地においては作業用メモリに記憶した地図データに基づいて地図の表示を行うことで、高高地におけるハードディスクドライブの保護と、車載用ナビゲーション装置の機能維持とを実現できる。このとき、ハードディスクドライブからの地図データの退避に作業用メモリを用いることで、地図データを退避するために大容量の専用メモリを確保する必要がない。よって、製品コストの増加を抑えることができる。
【0014】
また、作業用メモリに地図データを読み込む際、遷移先の高高地全域を含む範囲の地図データであって、この範囲の地図データが作業用メモリの限られた記憶容量に収まるように縮尺精度が設定される。そして、この設定された縮尺精度による高高地全域の地図データが記憶される。これにより、作業メモリの記憶容量の大小に依らず、高高地内でハードディスクドライブが停止している間は、当該高高地の全域の地図の表示を継続させることができる。
【0015】
複数の縮尺精度の地図からなる階層構造を有する地図データは、一般に縮尺精度が大きいほど地図がより詳細に描画されるため、地理的面積あたりのデータ量が大きくなる。そこで、例えば、ある縮尺精度においては、遷移先の高高地の全域を含む範囲の地図データが作業用メモリの記憶容量に収まらない場合、その縮尺精度よりも更に縮尺精度を小さくして、高高地エリア全域を含む範囲の地図データが作業用メモリの記憶容量に収まるようにすればよい。
【0016】
ところで、車載用ナビゲーション装置において、現在位置から目的地までの経路が設定されている場合、車両はその経路に沿って走行すると予想される。したがって、高高地でハードディスクドライブが停止している間は、この目的地までの経路に沿った範囲の地図を表示できる程度の地図データを作業用メモリに記憶させておけば、この作業メモリに記憶した地図データによって当該高高地内で車両が通過すると予想される範囲を補うことができると考えられる。
【0017】
そこで、請求項2に記載のように構成するとよい。すなわち、データ制御手段は、高度検知手段により現在位置が遷移地であると検知された場合、目的地までの経路が設定されていれば、遷移先の連続する高高地内を通る当該経路を少なくとも含む範囲の地図データが記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を特定する。そして、この特定した縮尺精度に対応する地図データであって当該高高地を通る当該経路を少なくとも含む範囲の地図データをハードディスクドライブから読み出し、これを記憶手段に記録する。
【0018】
このようにすることで、高高地において作業用メモリに記憶させる地図データを、目的地までの経路を含む範囲に限定することができる。つまり、作業用メモリに記憶させるべき地図の範囲が経路の通る範囲に限定されて小さくければ、その分縮尺精度が大きい詳細な地図を記憶させることができるようになる。よって、ハードディスクドライブ停止中であっても、より縮尺精度の大きい詳細な地図を表示できるようになり、高高地における地図表示の利便性が向上する。
【0019】
以上で説明したような車載用ナビゲーション装置におけるデータ制御手段及び表示制御手段をコンピュータシステムで実現するには、請求項3に記載のようにコンピュータシステム上で稼動するプログラムとして備えればよい。このようなプログラムは、例えば磁気/光/光磁気ディスク、ハードディスク、ROM、RAM等のコンピュータにて読取可能な記憶媒体に記録し、必要に応じてコンピュータにロードすることにより、上記各手段としての機能を実現できる。
【発明を実施するための最良の形態】
【0020】
以下、本発明の一実施形態を図面に基づいて説明する。
[1.車載用ナビゲーション装置の構成の説明]
図1は、実施形態の車載用ナビゲーション装置1の概略構成を示すブロック図である。
【0021】
図1に示すように、車載用ナビゲーション装置1は、車両の現在位置を検出する位置検出器21と、利用者からの各種指示を入力するための操作スイッチ群22と、地図データやプログラム等を記憶する大容量記憶装置であるハードディスクドライブ(HDD)23と、各種情報を記憶する外部メモリ24と、地図表示画面等の各種表示を行うための表示装置25と、各種のガイド音声等を出力するための音声出力装置26と、制御部29とを備えている。
【0022】
位置検出器21は、GPS用の人工衛星からの送信電波をGPSアンテナを介して受信し、車両の位置座標や高度を検出するGPS受信機21aと、車両に加えられる回転運動の角速度に応じた検出信号を出力するジャイロスコープ21bと、車両の速度に応じた検出信号を出力する車速センサ21cとを備えている。そして、これら各センサ等21a〜21cは、各々が性質の異なる誤差を有しているため、互いに補完しながら使用するように構成されている。
【0023】
操作スイッチ群22は、表示装置25と一体に構成され表示面上に設置されるタッチパネル及び表示装置25の周囲に設けられたメカニカルなキースイッチ等が用いられる。
ハードディスクドライブ23は、情報を記憶するハードディスクと、ハードディスクに対して情報を読み書きするための磁気ヘッド、駆動部、制御部等からなるコントローラとが一体となった記憶装置である。ハードディスクドライブ23は、制御部29からの制御に基づいてハードディスクからデータを読み出し、これを制御部29へ入力する。ハードディスクドライブ23が記憶しているデータは、マップマッチング、経路探索、経路誘導等に用いる道路データ、地図表示に必要な各種データからなる描画データ等からなる地図データや、経路案内用データ、車載用ナビゲーション装置1の作動のためのプログラム等を含む各種データである。なお、このハードディスクドライブ23は、高度5000m以下、又は0.5気圧以上での使用環境において正常な作動が保証されているものと想定する。
【0024】
外部メモリ24は、後述の経路案内処理において算出された現在位置から目的地までの経路等の各種情報を記憶するためのものであり、その記憶内容は車両側から供給される電源によって保持される。
【0025】
表示装置25は、液晶ディスプレイ等の表示面を有するカラー表示装置である。表示装置25は、制御部29からの映像信号の入力に応じて各種画像を表示面に表示可能である。例えば、車両が走行中においては、ナビゲーション画面として位置検出器21にて検出した車両の現在位置とハードディスクドライブ23等から入力された地図データとから特定した現在地を示すマーク、目的地までの誘導経路、名称、目印、各種ランドマークのシンボル等の付加データとが重ねて表示される。
【0026】
音声出力装置26は、各種情報を音声にてユーザに報知できるように構成されている。これによって、表示装置25による表示と音声出力装置26からの音声出力との両方でユーザに対してルート案内等の各種案内をすることができる。
【0027】
制御部29は、CPU,ROM,CPUによる作業用のデータを記憶するためのワークメモリを含むRAM30,I/O及びこれらの構成を接続するバスライン等からなる周知のマイクロコンピュータを中心に構成されており、上述した各部構成を制御する。この制御部29は、ROMやハードディスクドライブ23、外部メモリ24等から読み込んだプログラムや各種データに従って種々の処理を実行する。
【0028】
例えば、ナビゲーション関係の処理としては、地図表示処理や経路案内処理等が挙げられる。地図表示処理は、位置検出器21からの各検出信号に基づいて車両の現在位置を算出し、ハードディスクドライブ23から読み込んだ地図データに基づいて現在位置付近の地図等を表示装置25に表示する処理である。
【0029】
ここで一旦、ハードディスクドライブ23に記憶されている地図データについて、図2に基づき説明する。図2は、複数の縮尺精度の地図からなる階層構造を有する地図データの概要を模式的に示す説明図である。
【0030】
図2(a),(b),(c)に示すように、地図データは、縮尺精度の大きい方から順に、階層0,1,2…といった具合に、異なる複数縮尺精度の地図による階層構造を有している。各階層の地図データは、所定の等間隔の緯度・経度でメッシュ状に区切られた分割エリアごとの地図データの集合によって構成されている。そして、各階層において、縦横それぞれ4つ分、計16の分割エリアからなる範囲が、この階層から1つ縮尺精度の小さい(=広域)の階層における1つ分の分割エリアに相当するように定義されている。
【0031】
ハードディスクドライブ23の作動が制限されていない通常の状態において地図表示を行う場合、指定された縮尺精度に対応する階層の地図データのうち、自車両が存在する分割エリアと、その周辺の分割エリア(例えば、自車両が存在する分割エリアの周囲8箇所の分割エリア)の地図データをハードディスクドライブ23からRAM30のワークメモリに読み出し、この読み出した地図データに基づいて地図の表示を行っている。このようにすることで、表示中の地図画面からのスクロール先に相当する地図データもワークメモリに予め用意することができ、地図画面をスクロールした際にスクロール先の地図を表示できなくなるのを防いでいる。
【0032】
また、各分割エリアの地図データには、当該分割エリアが高高地エリアに該当するか否かを示す高度情報が付加されている。具体的には、ある分割エリアに高度5000m以上の地域が一部でも含まれる場合、高度情報として「1」の符号を割り当てることで、その分割エリアを高高地エリアと定義する。一方、分割エリア内に高度5000m以上の地域が含まれない場合、高度情報として「0」の符号を割り当てることで、その分割エリアを高高地エリアではない(低地)と定義する。
【0033】
さらに、高高地エリアと定義されている分割エリアの地図データには、当該分割エリアが属する階層から1つ縮尺精度の小さい(=広域)階層において当該分割エリアと同一地域に該当する広域の分割エリアへの参照先を示す情報が付加されている。
【0034】
図1の制御部29の説明に戻る。制御部29が実行する経路案内処理は、ハードディスクドライブ23に格納された地点データと、操作スイッチ群22等の操作に従って設定された目的地とに基づいて、現在位置から目的地までの最適な経路である目的地経路を算出し、現在位置と目的地経路との関係を考慮して目的までの走行案内を行う処理である。このように自動的に最適な経路を設定する手法として、ダイクストラ法によるコスト計算等の手法が知られている。
【0035】
また、車載用ナビゲーション装置1は、ハードディスクドライブ23の正常な作動が保証されている高度の上限(5000m)を超える地域での使用が想定されている。そのため、制御部29は、上述の高高地エリアに該当する地域に到達した場合、ハードディスクドライブ23の作動を禁止し、高度5000mを超える地域でハードディスクドライブ23を作動させることによる破損を防止する。
【0036】
さらに、制御部29は、本発明の特徴的な処理として、次のような「地図データ制御処理」を実行する。制御部29は、自車両の現在位置が低地から高度5000m以上の地域が含まれる高高地エリアへ遷移する際に、この遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データを、ハードディスクドライブ23からRAM30のワークメモリへ読み込み、高高地エリア内ではワークメモリに記憶されている地図データに基づいて地図表示を行う。なお、この「地図データ制御処理」の詳細な内容については後述する。
【0037】
以上、車載用ナビゲーション装置1の概略構成について説明したが、本実施形態における車載用ナビゲーション装置1の構成と特許請求の範囲に記載した構成との対応は次のとおりである。本実施形態における車載用ナビゲーション装置1のRAM30が、特許請求の範囲における記憶手段に相当する。また、位置検出器21及び制御部29が、高度検知手段に相当する。また、制御部29が、データ制御手段及び表示制御手段に相当する。
【0038】
[2.「地図データ制御処理」の説明]
以下、車載用ナビゲーション装置1の制御部29が実行する上述の「地図データ制御処理」の詳細な内容について説明する。
【0039】
図3は、制御部29が実行する「地図データ制御処理」の手順を示すフローチャートである。この処理は、車両の走行中において上述の地図表示処理や経路案内処理等と並行して、所定時間ごとに繰り返し実行される。
【0040】
制御部29は、まず、位置検出器21からの入力信号に基づいて車両の現在位置を検出する(S110)。そして、この検出した現在位置が、高高地エリアに該当するか、高高地エリア以外の低地から高高地へリアへと遷移する遷移地に該当するか、高高地エリア以外の低地に該当するかを判定する(S120)。
【0041】
具体的には、ハードディスクドライブ23に記憶されている複数の縮尺精度の地図データのうち、最も縮尺精度の大きい階層(ここでは、図2(a)の階層0がこれに該当する)の地図データから、自車両が存在する分割エリア及びその周辺の8箇所の分割エリアに対応する高度情報を参照する。そして、自車両が存在する分割エリアの高度情報に高高地エリアであることを示す「1」の符号が割り当てられていれば、現在位置が高高地エリアであると判定する。また、自車両が存在する分割エリアの高度情報に低地であることを示す「0」の符号が割り当てられており、さらに、自車両が存在する分割エリアと、自車両の進行方向上にあって、この分割エリアに隣接する高高地エリアである分割エリアとの境界線上、あるいはこの境界線近傍に自車両が位置する場合、現在位置が遷移地であると判定する。また、自車両が存在する分割エリアの高度情報に低地エリアであることを示す「0」の符号が割り当てられており、上述の遷移地に該当しない場合、現在位置が低地であると判定する。
【0042】
なお、S120の処理を実行する際、ハードディスクドライブ23の作動が禁止されている状態であれば、RAM30のワークメモリに記憶されている地図データに含まれる高度情報に基づいて、現在位置が高高度エリアであるか否かを判定すればよい。あるいは、地図データに依らずに、GPS21aを介して受信したGPS衛星の電波信号に基づく三次元測位によって高度を取得し、これに基づいて現在位置が高高度エリアであるか否かを判定してもよい。
【0043】
S120で現在位置が低地に該当すると判定した場合(S120:低地)、ハードディスクドライブ23の作動を許可した状態で地図表示処理や経路案内処理等を行う通常作動モードでの作動を実行する(S130)。この通常作動モードにおいては、ハードディスクドライブ23へアクセスすることで、ハードディスクドライブ23に記憶されている地図データ等の各種データを読み出し、この読み出したデータに基づいて通常どおりに地図表示処理や経路案内処理等を実行する。
【0044】
一方、S120で現在位置が遷移地に該当すると判定した場合(S120:遷移地)、自車両が高高地エリアへ進入する旨のメッセージをユーザに対して報知する(S140)。メッセージの報知には、表示装置25によるメッセージ画像の表示や、音声出力装置26による音声メッセージの出力を用いればよい。また、高高地エリアへ進入するためハードディスクドライブ23を停止することをユーザへ通知するようにしてもよい。
【0045】
つぎに、制御部29は、RAM30のワークメモリへ記録すべき地図の範囲及び縮尺精度を算出する(S150)。具体的には、遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データであって、この範囲の地図データがワークメモリにおいて地図データを記憶可能な領域の記憶容量に収まるように縮尺精度を特定する。
【0046】
例えば、ワークメモリが、縮尺精度の異なるどの階層の地図データについても一度に分割エリア9つ分の地図データを記憶可能であると仮定する。このような場合、図2(a)の例に示す階層0の地図データ上では、自車両が進入しようとする高高地エリア全域が、9つ分の分割エリア内に収まっていない。つまり、この階層0の地図データでは、連続する高高地エリア全域の地図データをワークメモリに記憶させることはできない。そこで、この階層0の地図データ上において、遷移先の高高地エリアに該当する分割エリアに付されている参照先のデータに基づいて、この階層0から1つ縮尺精度の小さい(=広域)階層1の分割エリアの地図データを参照する。図2(b)の例に示す階層1の地図データ上では、自車両が進入しようとする高高地エリア全域が9つ分の分割エリア内に収まっている。つまり、この階層1の地図データならば、連続する高高地エリア全域を含む地図データをワークメモリに記憶させることができる。
【0047】
このようにして、ワークメモリに記憶させる地図データの縮尺精度として階層1に相当する縮尺精度が特定され、階層1の地図データの中から遷移先の高高地エリア全域及び自車両の現在位置を含む縦横3箇所分の計9つの分割エリアが、ワークメモリに記憶させるべき地図データの範囲に設定される。
【0048】
あるいは、現在位置から目的地までの経路が設定されており、この経路が外部メモリ24に記憶されている場合、遷移先の高高地エリアから連続する高高地エリア全域のうち、目的地までの経路が通る分割エリアを少なくとも含む範囲を、ワークメモリに記憶させるべき地図データの範囲として設定するようにしてもよい。このようにすることで、必ずしも連続する高高地エリア全域をワークメモリに記憶させる必要がなく、ワークメモリに記憶させるべき地図の範囲を低減できるため、その分より縮尺精度の大きい地図データをワークメモリに記憶させることができる。
【0049】
S150でワークメモリに記憶させる地図の範囲及び縮尺精度を算出した後、この算出した縮尺精度に該当する階層の地図データのうち、算出した範囲の分割エリアに該当する部分の地図データを、ハードディスクドライブ23からRAM30のワークメモリへ読み込む(S160)。そして、ワークメモリに読み込んだ地図データに基づき、この地図データに該当する縮尺精度による地図の表示を開始し(S170)、ハードディスクドライブ23の作動を禁止する(S180)。
【0050】
その後、S120で現在位置が高高地エリアに該当すると判定した場合(S120:高高地)、ハードディスクドライブ23の作動を禁止した状態で、ワークメモリに記憶されている地図データに基づく地図データの表示を行う(S190)。
【0051】
車両が高高地エリアを走行している間は、ハードディスクドライブ23の作動を禁止した状態が継続する。その間、ワークメモリに記憶されている地図データに基づく地図表示が行われる。この状態から高高地エリアから脱出したと判定されれば、ハードディスクドライブ23の作動が解禁され、ハードディスクドライブ23から読み込んだデータに基づいて作動する通常作動モードへ復帰する。
【0052】
[3.効果]
実施形態の車載用ナビゲーション装置によれば、以下のような効果を奏する。
(1)低地から高高地へと遷移するタイミングで地図データの一部をRAM30のワークメモリに記憶し、高高地においてはワークメモリに記憶した地図データに基づいて地図の表示を行うことで、高高地におけるハードディスクドライブ23の保護と、車載用ナビゲーション装置1の機能維持とを実現できる。このとき、ハードディスクドライブ23からの地図データの退避にワークメモリを用いることで、地図データを退避するために大容量の専用メモリを設置する必要がない。よって、製品コストの増加を抑えることができる。
【0053】
(2)遷移地においてワークメモリに地図データを読み込む際、遷移先の高高地エリアから連続する全ての高高地エリアを含む範囲の地図データであって、この範囲の地図データがワークメモリにおいて地図データを記憶可能な領域の記憶容量に収まるように縮尺精度が設定される。そして、この設定された縮尺精度による高高地エリア全域の地図データが記憶される。このようにすることで、ワークメモリの記憶容量の大小に依らず、高高地エリア内でハードディスクドライブ23が停止している間は、当該高高地エリア全域の地図の表示を継続させることができる。
【0054】
(3)現在位置から目的地までの経路が設定されている場合、遷移先の高高地エリアから連続する高高地エリア全域のうち、目的地までの経路が通る分割エリアを少なくとも含む範囲を、ワークメモリに記憶させるべき範囲として設定することで、ワークメモリに記憶させるべき地図の範囲を低減できる。したがって、その分縮尺精度の大きい地図データをワークメモリに記憶させることができ、ハードディスクドライブ23が停止中であってもより詳細な地図を表示できるようになる。
【0055】
[4.別実施形態]
以上、本発明の実施形態について説明したが、本発明は上記の実施形態に何ら限定されるものではなく、様々な態様にて実施することが可能である。
【0056】
例えば、上記実施形態では、現在位置が高高地エリア、遷移地、低地の何れかに該当するかを判断する際(図3のS120参照)、地図データに含まれる高度情報に基づいて判定する構成となっているが、現在位置の高度を判定する方法はこれに限らない。例えば、GPS受信機21aによって受信したGPS衛星からの電波信号に基づく三次元測位により高度を測定し、その測定された高度に応じて高高地エリア、遷移地、低地の何れかに該当するかを判定してもよい。また、気圧センサ等により計測した気圧によって高度を特定するような構成であってもよい。
【0057】
あるいは、地図座標平面を所定の緯度及び経度でメッシュ状に区切ったエリアごとに、高高地、遷移地、低地を定義した高度判定用のテーブルデータを外部メモリ24等に格納しておき、この高度判定用のテーブルデータと現在位置の座標とを照らし合わせることで、高高地エリア、遷移地、低地の何れかに該当するかを判定してもよい。
【図面の簡単な説明】
【0058】
【図1】実施形態の車載用ナビゲーション装置1の概略構成を示す説明図である。
【図2】複数の縮尺精度の地図からなる階層構造を有する地図データの概要を模式的に示す説明図である。
【図3】「地図データ制御処理」の手順を示すフローチャートである。
【符号の説明】
【0059】
1…車載用ナビゲーション装置、21…位置検出器、21a…GPS受信機、21b…ジャイロスコープ、21c…車速センサ、22…操作スイッチ群、23…ハードディスクドライブ、24…外部メモリ、25…表示装置、26…音声出力装置、29…制御部、30…RAM。
【特許請求の範囲】
【請求項1】
複数の縮尺精度の地図からなる階層構造を有する地図データを記憶するハードディスクドライブを外部記憶装置として備え、このハードディスクドライブから読み出した地図データに基づいて地図の表示を行う車載用ナビゲーション装置において、
当該車載用ナビゲーション装置に用いられるコンピュータの作業用メモリであって、所定の記憶容量の範囲内で前記ハードディスクドライブに記憶されている地図データの一部を記憶する記憶手段と、
現在位置が、所定の高度以上の地域を含む高高地であるか、前記高高地でないエリアから前記高高地へと遷移する遷移地であるかを検知する高度検知手段と、
前記高度検知手段により現在位置が遷移地であると検知された場合、この遷移先の連続する高高地の全域を少なくとも含む範囲の地図データが前記記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を前記複数の縮尺精度の中から特定し、この特定した縮尺精度に対応する地図データであって当該高高地の全域を含む範囲の地図データをハードディスクドライブから読み出し、これを前記記憶手段に記録するデータ制御手段と、
前記高度検出手段により現在位置が高高地であると検知されている間、前記ハードディスクドライブを停止した状態で前記記憶手段から読み出した地図データに基づいて地図表示を行う表示制御手段とを備えること
を特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置において、
現在位置から目的地までの経路を算出する機能を有しており、
前記データ制御手段は、前記高度検知手段により現在位置が遷移地であると検知された場合、目的地までの経路が設定されていれば、この遷移先の連続する高高地内を通る当該経路を少なくとも含む範囲の地図データが前記記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を特定し、この特定した縮尺精度に対応する地図データであって当該高高地を通る当該経路を少なくとも含む範囲の地図データをハードディスクドライブから読み出し、これを前記記憶手段に記録すること
を特徴とする車載用ナビゲーション装置。
【請求項3】
請求項1又は請求項2に記載の車載用ナビゲーション装置に用いられるコンピュータを制御するためのプログラムであって、当該コンピュータを前記データ制御手段及び前記表示制御手段として機能させるためのプログラム。
【請求項1】
複数の縮尺精度の地図からなる階層構造を有する地図データを記憶するハードディスクドライブを外部記憶装置として備え、このハードディスクドライブから読み出した地図データに基づいて地図の表示を行う車載用ナビゲーション装置において、
当該車載用ナビゲーション装置に用いられるコンピュータの作業用メモリであって、所定の記憶容量の範囲内で前記ハードディスクドライブに記憶されている地図データの一部を記憶する記憶手段と、
現在位置が、所定の高度以上の地域を含む高高地であるか、前記高高地でないエリアから前記高高地へと遷移する遷移地であるかを検知する高度検知手段と、
前記高度検知手段により現在位置が遷移地であると検知された場合、この遷移先の連続する高高地の全域を少なくとも含む範囲の地図データが前記記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を前記複数の縮尺精度の中から特定し、この特定した縮尺精度に対応する地図データであって当該高高地の全域を含む範囲の地図データをハードディスクドライブから読み出し、これを前記記憶手段に記録するデータ制御手段と、
前記高度検出手段により現在位置が高高地であると検知されている間、前記ハードディスクドライブを停止した状態で前記記憶手段から読み出した地図データに基づいて地図表示を行う表示制御手段とを備えること
を特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置において、
現在位置から目的地までの経路を算出する機能を有しており、
前記データ制御手段は、前記高度検知手段により現在位置が遷移地であると検知された場合、目的地までの経路が設定されていれば、この遷移先の連続する高高地内を通る当該経路を少なくとも含む範囲の地図データが前記記憶手段の記憶容量の範囲内で記憶可能となる縮尺精度を特定し、この特定した縮尺精度に対応する地図データであって当該高高地を通る当該経路を少なくとも含む範囲の地図データをハードディスクドライブから読み出し、これを前記記憶手段に記録すること
を特徴とする車載用ナビゲーション装置。
【請求項3】
請求項1又は請求項2に記載の車載用ナビゲーション装置に用いられるコンピュータを制御するためのプログラムであって、当該コンピュータを前記データ制御手段及び前記表示制御手段として機能させるためのプログラム。
【図1】


【図3】
【図2】
【図3】
【図2】
【公開番号】特開2009−74844(P2009−74844A)
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願番号】特願2007−242274(P2007−242274)
【出願日】平成19年9月19日(2007.9.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年4月9日(2009.4.9)
【国際特許分類】
【出願日】平成19年9月19日(2007.9.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]