
車載用ナビゲーション装置
【目的】マニューバポイントとの距離の変化を直感的に把握でき、ルート案内通りに進行できる車載用ナビゲーション装置を提供する。
【構成】車載用ナビゲーション装置20は、現在位置ZからマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、距離Xが予め設定された距離X1以内か否かを判定するマニューバポイント距離判定手段2と、距離XがX1以内になると、距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、ルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、案内通りに通過した場合に所定のクリア報知信号Cを出力するクリア報知手段5と、案内通りに通過しなかった場合に所定の誤選択報知信号Fを出力する誤選択報知手段6と、を備える構成である。
【構成】車載用ナビゲーション装置20は、現在位置ZからマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、距離Xが予め設定された距離X1以内か否かを判定するマニューバポイント距離判定手段2と、距離XがX1以内になると、距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、ルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、案内通りに通過した場合に所定のクリア報知信号Cを出力するクリア報知手段5と、案内通りに通過しなかった場合に所定の誤選択報知信号Fを出力する誤選択報知手段6と、を備える構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置の技術分野に関し、特に、そのマニューバポイントの聴覚を通しての案内手段に関する。
【背景技術】
【0002】
従来の車載用ナビゲーション装置では、案内ルート上における分岐点や交差点での曲がるべきポイントなどの案内を要する重要なポイント(マニューバポイントと称する。)を表示装置の画面上に表示された地図上に示すとともに、音声にて当該マニューバポイントの接近を知らせる手段を備えて、画面上のルート表示及び音声案内を行って目的地へのルート案内を行うものがある。
【0003】
例えば、下記[特許文献1]には、自動車のウィンカーに連動して交差点の右左折の案内(警告)を視覚的に画面上に表示し、或いは聴覚的に音声ガイダンスで行い、また、案内ルートと逸脱している場合には警告信号を発するようにしたナビゲーション装置の技術が開示されている。
【0004】
また、アラーム音に関しては、自動車のコーナーセンサとして、バンパーに内蔵された超音波センサが障害物との距離を検知し、距離に応じて断続音間隔が変わるアラーム音で警告するものが既に実用化されている。
【0005】
【特許文献1】特開2000−55681号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の車載用ナビゲーション装置のマニューバポイントの案内の難点として、聴覚を通しての音声ガイダンスによるマニューバポイントの案内は、通常3段階程度なので、曲がるタイミングを掴みづらかったり、あと何メートルで曲がるのかを聞き逃したり、忘れてしまったりする可能性がある。音声ガイダンスでは正確にマニューバポイントの接近を把握できない場合が少なからず起こり得るのである。
【0007】
また、前述の自動車に付設されたコーナーセンサのように障害物との距離に応じてアラーム音の間隔を変化させるものは、超音波センサによる障害物との距離算出手段を採用しているが、これは対象物(障害物)との距離が比較的短い場合に有効であって、車載用ナビゲーション装置におけるマニューバポイントの案内手段としては適当ではない。
【0008】
さらに、ルート案内通りにマニューバポイントを通過したか否かは当該マニューバポイント通過後に直ちに運転者に知らせることが望ましいが、現在のところそのような機能を備えた車載用ナビゲーション装置は実現されていない。
【0009】
唯、前記[特許文献1]は、ルート案内と逸脱している場合には警告を発する機能(画面の点滅または音声ガイダンスなど)を備えるとするが、ルート案内通りにマニューバポイントを通過(クリア)した場合には何も報知しない構成である。この点、運転者としてはマニューバポイントを正しく走行したか否かを何れの場合も直ちに報知されて確認できた方が心理的に安心が得られると考えられる。
【0010】
また、マニューバポイントを正しく通過したか否かを通常の音声ガイダンスで逐一アナウンスされるのは、聴く側としては煩わしいと感じる可能性がある。
【0011】
本発明は上記事情に鑑みてなされたものであり、簡単な構成ながら、搭載車両の運転者(或いは同乗者)が次のマニューバポイントとの距離(接近)をリアルタイムに且つ直感的に把握できるように報知し、且つ、マニューバポイントをルート案内通りに通過した場合及び間違って通過した場合に、直ちにそれを聴覚的に簡潔に報知するようにした車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、画面上へのルート表示及び音声案内を行って、目的地へのルート案内を行う車載用ナビゲーション装置において、ルート案内中に、搭載車両の現在位置Zからルート案内上の重要ポイントであるマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、前記マニューバポイントMPまでの距離Xが予め設定された距離X1以内か否かを判定するマニューバポイント距離判定手段2と、前記現在位置Zから前記マニューバポイントMPまでの距離Xが前記設定された距離X1以内になると、その距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、前記搭載車両が前記マニューパポイントMPをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号Cを生成して前記スピーカ9から出力するクリア報知手段5と、前記搭載車両が前記マニューバポイントをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号Fを生成して前記スピーカ9から出力する誤選択報知手段6と、を備えることを特徴とする車載用ナビゲーション装置20を提供することにより、上記課題を解決する。
【発明の効果】
【0013】
本発明に係る車載用ナビゲーション装置は、上記のように構成されているため、
(1) ルート案内時に、次に曲がるべき交差点などの接近するマニューバポイントとの距離の変化を聴覚で直感的に把握でき、当該マニューバポイントでの搭載車両の運転を安全且つ正確に行うことができる。
(2) 搭載車両がマニューバポイントをルート案内通りに通過した場合には、ルート案内通りに通過した(クリアした)ことが簡単なクリア報知信号で報知されて直ちに確認することができ、安心して運転することができる。
(3) 搭載車両がマニューバポイントをルート案内通りに通過しなかった場合には、誤選択したことを簡単な誤選択報知信号で報知されるので、マニューバポイントのルート選択結果を直ちに確認できる。
【発明を実施するための最良の形態】
【0014】
本発明に係る車載用ナビゲーション装置の実施の形態について図面に基づいて説明する。なお、マニューバポイントの案内手段に関する以外は公知技術の車載用ナビゲーション装置と同様なのでそれらの詳細説明は省略し、専らルート案内時のマニューバポイントの案内手段について説明する。
【0015】
図1は本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。図2は本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の表示装置の画面上の現在位置とマニューバポイントとの距離関係を説明するための案内マップ例である。図3は本発明に係るマニューバポイントへの接近時の報知信号の出力の様子を説明するための波形図である。図4は本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の制御装置が各手段を機能させて行う処理内容を説明するためのフローチャートである。
【0016】
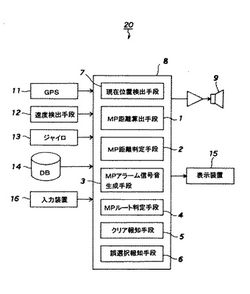
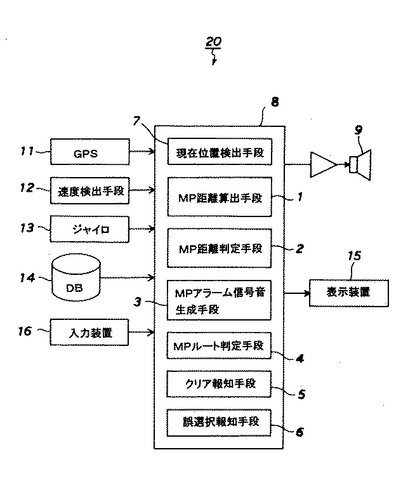
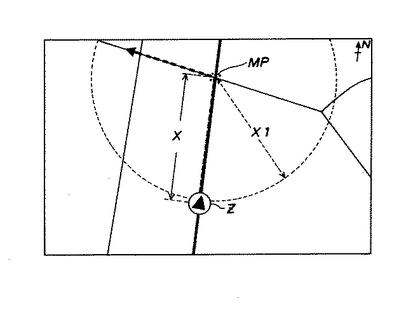
図1において、車載用ナビゲーション装置20は、キー入力やデジタイザーによる入力手段16と、液晶やCRTなどの表示装置15と、地図データベース14と、スピーカ9と、GPS11、スピードパルス信号による速度検出手段12、ジャイロコンパス13などから得られるデータに基づいて自車の現在位置を検出する現在位置検出手段7を備えるマイクロコンピュータを主体とする制御装置8と、を有しており、前記制御装置8はマップマッチング航法によって表示装置15の画面上に案内マップを示してルート案内を視覚を通して行い、且つ、図示されない音声ガイダンス手段或いは報知信号生成手段などによってスピーカ9から聴覚を通してルート案内を行う案内手段を備えており、特に、ルート案内中に、搭載車両における図2のような表示装置15の画面上に示される案内ルートマップでの現在位置Zからルート案内上の重要ポイントであるマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、前記マニューバポイントMPまでの距離Xが予め設定された距離X1(例えば、直線距離で100m、或いはルート上の走行距離で120mなど。)以内か否かを判定するマニューバポイント距離判定手段2と、前記現在位置Zから前記マニューバポイントMPまでの距離Xが前記設定された距離X1以内になると、その距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、前記搭載車両が前記マニューパポイントMPをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号Cを生成して前記スピーカ9から出力するクリア報知手段5と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号Fを生成して前記スピーカ9から出力する誤選択報知手段6と、を備える構成である。
【0017】
上記制御装置8における各手段の機能は、主にマイクロコンピュータのプログラム動作によって行われるCPUの演算処理にて実行される。
【0018】
上記搭載車両の現在位置XとマニューバポイントMPとの距離Xに応じて周期T及び音程Sの少なくとも一方が変化する断続的なアラーム信号音Aは、パルスジェネレータで容易に生成することができ、例えば「ピー、ピー、ピッ、ピッ、ピッ」と聴こえるブザー音である。
【0019】
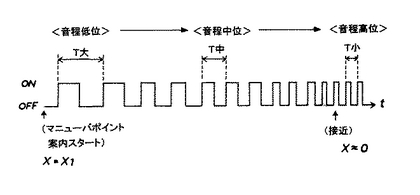
図3(横軸が時間軸t、縦軸はアラーム信号音Aの出力オン/オフ)に示されるように、上記アラーム信号音Aは、距離Xが設定距離X1以内に入った当初は音程Sが100〜300Hzと低く、その周期Tは大きく2〜4秒で「ブー、ブー」というような低音で長いアラーム音であるが、徐々にマニューバポイントMPに近づくにつれて音程Sが上がり、その周期Tも小さくなって、当該マニューバポイントMPに極接近したときには音程Sが1000〜2000Hzと相対的に高く、その出力間隔の周期Tは小さく0.1〜0.5秒で「ピピピピピ」というような高音で短い間隔のアラーム音とする。
【0020】
接近するほどアラーム信号音Aの音程Sを上げ、且つ、周期Tを短くするのが運転者にマニューバポイントMPの接近を意識させ、且つ、現在位置ZとマニューバポイントMPとの距離Xの変化の把握を容易ならしめる作用を与えるのである。勿論、前記アラーム信号音Aはその音程Sのみ、或いは周期Tのみを変化させても上記作用効果は得られるが、音程Sと周期Tの両方を変化させると相乗効果でよりはっきりと把握できるので好ましいといえる。
【0021】
次に、上記所定のクリア報知信号Cの出力は、予めメモリに記憶された信号データの再生であり、例えば、一般に「正解」を表現する「ピン、ポーン」と聴こえる信号音として、正しくマニューバポイントMPを進行したことを瞬時に運転者に伝えるようにする。
【0022】
また、同じく予めメモリに記憶された上記所定の誤選択報知信号Fは、一般に「間違い」を表現する「ブッブー」と聴こえる信号音として、マニューバポイントMPを間違って通過したことを瞬時に運転者に伝えて強く意識させるようにする。
【0023】
なお、上記アラーム信号音A、クリア報知信号C及び誤選択報知信号Fは、音声合成などの複雑な処理を必要とせず、既存の車載用ナビゲーション装置の制御装置8におけるソフトウェア追加で対応することができる。また、前述のマニューバポイント距離算出手段1、マニューバポイント距離判定手段2、マニューバポイントアラーム信号音生成手段3、マニューバポイントルート判定手段4は、既存の車載用ナビゲーション装置でも備わっている距離算出手段、判定手段の流用で対応できるので回路的な追加は殆どない。
【0024】
次に、上記制御装置8が行う演算処理手順について説明する。
【0025】
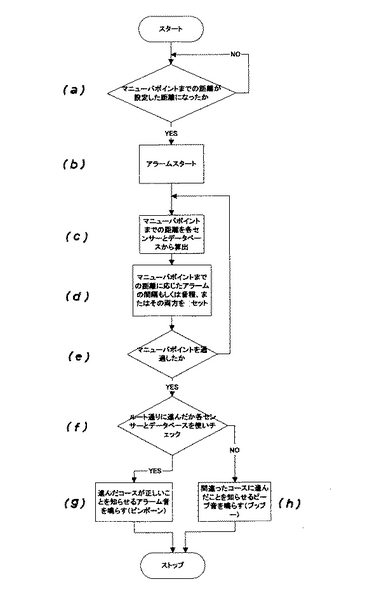
図3において、ルート案内時に、(a)現在位置Zと次のマニューバポイントMP(位置座標を地図データベース14から取得)までの距離Xが設定した距離X1(例えば100m)以内になったかを判断し、(b)yesであれば、アラーム信号音Aの出力を開始し、(c)当該マニューバポイントMPを通過するまでリアルタイムに現在位置Zと当該マニューバポイントMPまでの距離Xを各センサ(GPS11、速度検出手段12、ジャイロコンパス13)と地図データベース14から算出し、(d)マニューバポイントMPまでの距離Xに応じたアラーム信号音Aの周期T(間隔)及び音程Sの内の少なくとも一方を設定して出力し、(e)当該マニューバポイントMPを通過したか否かを判断して、(f)yesであれば、案内ルート通りに通過したか否かを前記各センサと地図データベース14を用いて判断し、(g)yesであれば、当該マニューバポイントMPで進んだコースが正しいことを報知するマニューバポイントクリア音(例えば「ピンポーン」という正解をイメージさせる心地好い簡潔な音)を出力し、(h)noであれば、間違ったコースに進んだことを報知する警告音(例えば「ブッブー」という間違いをイメージさせる簡潔な音)を出力し、本マニューバポイントMPの案内を終了する。
【0026】
以上、本発明の車載用ナビゲーション装置20によれば、次に曲がるべき交差点などのマニューバポイントとの距離や接近を音によって直感的に把握できるので、案内ルートを的確に走行することができ、且つ、マニューバポイントをルート案内通りに正しく進行したか否かを運転手が直ちに確認できるので、安心して走行することが可能になる。
【図面の簡単な説明】
【0027】
【図1】本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。
【図2】本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の表示装置の画面上の現在位置とマニューバポイントとの距離関係を説明するための案内マップ例である。
【図3】本発明に係るマニューバポイントへの接近時のアラーム音の出力の様子を説明するための波形図である。
【図4】本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の制御装置が各手段を機能させて行う処理内容を説明するためのフローチャートである。
【符号の説明】
【0028】
1 マニューバポイント距離算出手段
2 マニューバポイント距離判定手段
3 マニューバポイントアラーム信号音生成手段
4 マニューバポイントルート判定手段
5 クリア報知手段
6 誤選択報知手段
7 現在位置検出手段
8 制御装置
9 スピーカ
11 GPS
12 速度検出手段
13 ジャイロコンパス
14 地図データベース
15 表示装置
16 入力装置
20 車載用ナビゲーション装置
Z 現在位置
MP マニューバポイント
X マニューバポイントまでの距離
X1 予め設定された距離
T 周期
S 音程
A アラーム信号音
C クリア報知信号
F 誤選択報知信号
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置の技術分野に関し、特に、そのマニューバポイントの聴覚を通しての案内手段に関する。
【背景技術】
【0002】
従来の車載用ナビゲーション装置では、案内ルート上における分岐点や交差点での曲がるべきポイントなどの案内を要する重要なポイント(マニューバポイントと称する。)を表示装置の画面上に表示された地図上に示すとともに、音声にて当該マニューバポイントの接近を知らせる手段を備えて、画面上のルート表示及び音声案内を行って目的地へのルート案内を行うものがある。
【0003】
例えば、下記[特許文献1]には、自動車のウィンカーに連動して交差点の右左折の案内(警告)を視覚的に画面上に表示し、或いは聴覚的に音声ガイダンスで行い、また、案内ルートと逸脱している場合には警告信号を発するようにしたナビゲーション装置の技術が開示されている。
【0004】
また、アラーム音に関しては、自動車のコーナーセンサとして、バンパーに内蔵された超音波センサが障害物との距離を検知し、距離に応じて断続音間隔が変わるアラーム音で警告するものが既に実用化されている。
【0005】
【特許文献1】特開2000−55681号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
従来の車載用ナビゲーション装置のマニューバポイントの案内の難点として、聴覚を通しての音声ガイダンスによるマニューバポイントの案内は、通常3段階程度なので、曲がるタイミングを掴みづらかったり、あと何メートルで曲がるのかを聞き逃したり、忘れてしまったりする可能性がある。音声ガイダンスでは正確にマニューバポイントの接近を把握できない場合が少なからず起こり得るのである。
【0007】
また、前述の自動車に付設されたコーナーセンサのように障害物との距離に応じてアラーム音の間隔を変化させるものは、超音波センサによる障害物との距離算出手段を採用しているが、これは対象物(障害物)との距離が比較的短い場合に有効であって、車載用ナビゲーション装置におけるマニューバポイントの案内手段としては適当ではない。
【0008】
さらに、ルート案内通りにマニューバポイントを通過したか否かは当該マニューバポイント通過後に直ちに運転者に知らせることが望ましいが、現在のところそのような機能を備えた車載用ナビゲーション装置は実現されていない。
【0009】
唯、前記[特許文献1]は、ルート案内と逸脱している場合には警告を発する機能(画面の点滅または音声ガイダンスなど)を備えるとするが、ルート案内通りにマニューバポイントを通過(クリア)した場合には何も報知しない構成である。この点、運転者としてはマニューバポイントを正しく走行したか否かを何れの場合も直ちに報知されて確認できた方が心理的に安心が得られると考えられる。
【0010】
また、マニューバポイントを正しく通過したか否かを通常の音声ガイダンスで逐一アナウンスされるのは、聴く側としては煩わしいと感じる可能性がある。
【0011】
本発明は上記事情に鑑みてなされたものであり、簡単な構成ながら、搭載車両の運転者(或いは同乗者)が次のマニューバポイントとの距離(接近)をリアルタイムに且つ直感的に把握できるように報知し、且つ、マニューバポイントをルート案内通りに通過した場合及び間違って通過した場合に、直ちにそれを聴覚的に簡潔に報知するようにした車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、画面上へのルート表示及び音声案内を行って、目的地へのルート案内を行う車載用ナビゲーション装置において、ルート案内中に、搭載車両の現在位置Zからルート案内上の重要ポイントであるマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、前記マニューバポイントMPまでの距離Xが予め設定された距離X1以内か否かを判定するマニューバポイント距離判定手段2と、前記現在位置Zから前記マニューバポイントMPまでの距離Xが前記設定された距離X1以内になると、その距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、前記搭載車両が前記マニューパポイントMPをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号Cを生成して前記スピーカ9から出力するクリア報知手段5と、前記搭載車両が前記マニューバポイントをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号Fを生成して前記スピーカ9から出力する誤選択報知手段6と、を備えることを特徴とする車載用ナビゲーション装置20を提供することにより、上記課題を解決する。
【発明の効果】
【0013】
本発明に係る車載用ナビゲーション装置は、上記のように構成されているため、
(1) ルート案内時に、次に曲がるべき交差点などの接近するマニューバポイントとの距離の変化を聴覚で直感的に把握でき、当該マニューバポイントでの搭載車両の運転を安全且つ正確に行うことができる。
(2) 搭載車両がマニューバポイントをルート案内通りに通過した場合には、ルート案内通りに通過した(クリアした)ことが簡単なクリア報知信号で報知されて直ちに確認することができ、安心して運転することができる。
(3) 搭載車両がマニューバポイントをルート案内通りに通過しなかった場合には、誤選択したことを簡単な誤選択報知信号で報知されるので、マニューバポイントのルート選択結果を直ちに確認できる。
【発明を実施するための最良の形態】
【0014】
本発明に係る車載用ナビゲーション装置の実施の形態について図面に基づいて説明する。なお、マニューバポイントの案内手段に関する以外は公知技術の車載用ナビゲーション装置と同様なのでそれらの詳細説明は省略し、専らルート案内時のマニューバポイントの案内手段について説明する。
【0015】
図1は本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。図2は本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の表示装置の画面上の現在位置とマニューバポイントとの距離関係を説明するための案内マップ例である。図3は本発明に係るマニューバポイントへの接近時の報知信号の出力の様子を説明するための波形図である。図4は本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の制御装置が各手段を機能させて行う処理内容を説明するためのフローチャートである。
【0016】
図1において、車載用ナビゲーション装置20は、キー入力やデジタイザーによる入力手段16と、液晶やCRTなどの表示装置15と、地図データベース14と、スピーカ9と、GPS11、スピードパルス信号による速度検出手段12、ジャイロコンパス13などから得られるデータに基づいて自車の現在位置を検出する現在位置検出手段7を備えるマイクロコンピュータを主体とする制御装置8と、を有しており、前記制御装置8はマップマッチング航法によって表示装置15の画面上に案内マップを示してルート案内を視覚を通して行い、且つ、図示されない音声ガイダンス手段或いは報知信号生成手段などによってスピーカ9から聴覚を通してルート案内を行う案内手段を備えており、特に、ルート案内中に、搭載車両における図2のような表示装置15の画面上に示される案内ルートマップでの現在位置Zからルート案内上の重要ポイントであるマニューバポイントMPまでの距離Xを算出するマニューバポイント距離算出手段1と、前記マニューバポイントMPまでの距離Xが予め設定された距離X1(例えば、直線距離で100m、或いはルート上の走行距離で120mなど。)以内か否かを判定するマニューバポイント距離判定手段2と、前記現在位置Zから前記マニューバポイントMPまでの距離Xが前記設定された距離X1以内になると、その距離Xに応じて周期T及び音程Sの内の少なくとも一方が変化する断続的なアラーム信号音Aを生成してスピーカ9から出力するマニューバポイントアラーム信号音生成手段3と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段4と、前記搭載車両が前記マニューパポイントMPをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号Cを生成して前記スピーカ9から出力するクリア報知手段5と、前記搭載車両が前記マニューバポイントMPをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号Fを生成して前記スピーカ9から出力する誤選択報知手段6と、を備える構成である。
【0017】
上記制御装置8における各手段の機能は、主にマイクロコンピュータのプログラム動作によって行われるCPUの演算処理にて実行される。
【0018】
上記搭載車両の現在位置XとマニューバポイントMPとの距離Xに応じて周期T及び音程Sの少なくとも一方が変化する断続的なアラーム信号音Aは、パルスジェネレータで容易に生成することができ、例えば「ピー、ピー、ピッ、ピッ、ピッ」と聴こえるブザー音である。
【0019】
図3(横軸が時間軸t、縦軸はアラーム信号音Aの出力オン/オフ)に示されるように、上記アラーム信号音Aは、距離Xが設定距離X1以内に入った当初は音程Sが100〜300Hzと低く、その周期Tは大きく2〜4秒で「ブー、ブー」というような低音で長いアラーム音であるが、徐々にマニューバポイントMPに近づくにつれて音程Sが上がり、その周期Tも小さくなって、当該マニューバポイントMPに極接近したときには音程Sが1000〜2000Hzと相対的に高く、その出力間隔の周期Tは小さく0.1〜0.5秒で「ピピピピピ」というような高音で短い間隔のアラーム音とする。
【0020】
接近するほどアラーム信号音Aの音程Sを上げ、且つ、周期Tを短くするのが運転者にマニューバポイントMPの接近を意識させ、且つ、現在位置ZとマニューバポイントMPとの距離Xの変化の把握を容易ならしめる作用を与えるのである。勿論、前記アラーム信号音Aはその音程Sのみ、或いは周期Tのみを変化させても上記作用効果は得られるが、音程Sと周期Tの両方を変化させると相乗効果でよりはっきりと把握できるので好ましいといえる。
【0021】
次に、上記所定のクリア報知信号Cの出力は、予めメモリに記憶された信号データの再生であり、例えば、一般に「正解」を表現する「ピン、ポーン」と聴こえる信号音として、正しくマニューバポイントMPを進行したことを瞬時に運転者に伝えるようにする。
【0022】
また、同じく予めメモリに記憶された上記所定の誤選択報知信号Fは、一般に「間違い」を表現する「ブッブー」と聴こえる信号音として、マニューバポイントMPを間違って通過したことを瞬時に運転者に伝えて強く意識させるようにする。
【0023】
なお、上記アラーム信号音A、クリア報知信号C及び誤選択報知信号Fは、音声合成などの複雑な処理を必要とせず、既存の車載用ナビゲーション装置の制御装置8におけるソフトウェア追加で対応することができる。また、前述のマニューバポイント距離算出手段1、マニューバポイント距離判定手段2、マニューバポイントアラーム信号音生成手段3、マニューバポイントルート判定手段4は、既存の車載用ナビゲーション装置でも備わっている距離算出手段、判定手段の流用で対応できるので回路的な追加は殆どない。
【0024】
次に、上記制御装置8が行う演算処理手順について説明する。
【0025】
図3において、ルート案内時に、(a)現在位置Zと次のマニューバポイントMP(位置座標を地図データベース14から取得)までの距離Xが設定した距離X1(例えば100m)以内になったかを判断し、(b)yesであれば、アラーム信号音Aの出力を開始し、(c)当該マニューバポイントMPを通過するまでリアルタイムに現在位置Zと当該マニューバポイントMPまでの距離Xを各センサ(GPS11、速度検出手段12、ジャイロコンパス13)と地図データベース14から算出し、(d)マニューバポイントMPまでの距離Xに応じたアラーム信号音Aの周期T(間隔)及び音程Sの内の少なくとも一方を設定して出力し、(e)当該マニューバポイントMPを通過したか否かを判断して、(f)yesであれば、案内ルート通りに通過したか否かを前記各センサと地図データベース14を用いて判断し、(g)yesであれば、当該マニューバポイントMPで進んだコースが正しいことを報知するマニューバポイントクリア音(例えば「ピンポーン」という正解をイメージさせる心地好い簡潔な音)を出力し、(h)noであれば、間違ったコースに進んだことを報知する警告音(例えば「ブッブー」という間違いをイメージさせる簡潔な音)を出力し、本マニューバポイントMPの案内を終了する。
【0026】
以上、本発明の車載用ナビゲーション装置20によれば、次に曲がるべき交差点などのマニューバポイントとの距離や接近を音によって直感的に把握できるので、案内ルートを的確に走行することができ、且つ、マニューバポイントをルート案内通りに正しく進行したか否かを運転手が直ちに確認できるので、安心して走行することが可能になる。
【図面の簡単な説明】
【0027】
【図1】本発明に係る車載用ナビゲーション装置の構成を示すブロック図である。
【図2】本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の表示装置の画面上の現在位置とマニューバポイントとの距離関係を説明するための案内マップ例である。
【図3】本発明に係るマニューバポイントへの接近時のアラーム音の出力の様子を説明するための波形図である。
【図4】本発明に係る車載用ナビゲーション装置におけるマニューバポイント案内時の制御装置が各手段を機能させて行う処理内容を説明するためのフローチャートである。
【符号の説明】
【0028】
1 マニューバポイント距離算出手段
2 マニューバポイント距離判定手段
3 マニューバポイントアラーム信号音生成手段
4 マニューバポイントルート判定手段
5 クリア報知手段
6 誤選択報知手段
7 現在位置検出手段
8 制御装置
9 スピーカ
11 GPS
12 速度検出手段
13 ジャイロコンパス
14 地図データベース
15 表示装置
16 入力装置
20 車載用ナビゲーション装置
Z 現在位置
MP マニューバポイント
X マニューバポイントまでの距離
X1 予め設定された距離
T 周期
S 音程
A アラーム信号音
C クリア報知信号
F 誤選択報知信号
【特許請求の範囲】
【請求項1】
画面上へのルート表示及び音声案内を行って、目的地へのルート案内を行う車載用ナビゲーション装置において、
ルート案内中に、搭載車両の現在位置からルート案内上の重要ポイントであるマニューバポイントまでの距離を算出するマニューバポイント距離算出手段と、
前記マニューバポイントまでの距離が予め設定された距離以内か否かを判定するマニューバポイント距離判定手段と、
前記現在位置から前記マニューバポイントまでの距離が前記設定された距離以内になると、その距離に応じて周期及び音程の内の少なくとも一方が変化する断続的なアラーム信号音を生成してスピーカから出力するマニューバポイントアラーム信号音生成手段と、
前記搭載車両が前記マニューバポイントをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段と、
前記搭載車両が前記マニューパポイントをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号を生成して前記スピーカから出力するクリア報知手段と、
前記搭載車両が前記マニューバポイントをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号を生成して前記スピーカから出力する誤選択報知手段と、を備えることを特徴とする車載用ナビゲーション装置。
【請求項1】
画面上へのルート表示及び音声案内を行って、目的地へのルート案内を行う車載用ナビゲーション装置において、
ルート案内中に、搭載車両の現在位置からルート案内上の重要ポイントであるマニューバポイントまでの距離を算出するマニューバポイント距離算出手段と、
前記マニューバポイントまでの距離が予め設定された距離以内か否かを判定するマニューバポイント距離判定手段と、
前記現在位置から前記マニューバポイントまでの距離が前記設定された距離以内になると、その距離に応じて周期及び音程の内の少なくとも一方が変化する断続的なアラーム信号音を生成してスピーカから出力するマニューバポイントアラーム信号音生成手段と、
前記搭載車両が前記マニューバポイントをルート案内通りに通過したか否かを判定するマニューバポイントルート判定手段と、
前記搭載車両が前記マニューパポイントをルート案内通りに通過した場合には、ルート案内通りに通過したことを報知する所定のクリア報知信号を生成して前記スピーカから出力するクリア報知手段と、
前記搭載車両が前記マニューバポイントをルート案内通りに通過しなかった場合には、間違ったルートを選択したことを報知する所定の誤選択報知信号を生成して前記スピーカから出力する誤選択報知手段と、を備えることを特徴とする車載用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−29847(P2006−29847A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−205615(P2004−205615)
【出願日】平成16年7月13日(2004.7.13)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月13日(2004.7.13)
【出願人】(000004329)日本ビクター株式会社 (3,896)
【Fターム(参考)】
[ Back to top ]