
車載用ナビゲーション装置
【課題】平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】地図データを格納した手段と、自車位置を検出する手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信し、発信信号に対する対象物からの反射信号を受信したときに当該対象物までの距離を検出する手段とを備えた車載用ナビゲーション装置において、検出された自車位置と地図データを参照して(S1)、検出された当該対象物までの距離を指示する信号の強度の変化に応じて(S2,S3,S6)、自車の走行状態を検知する(S4,S7,S8)。
【解決手段】地図データを格納した手段と、自車位置を検出する手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信し、発信信号に対する対象物からの反射信号を受信したときに当該対象物までの距離を検出する手段とを備えた車載用ナビゲーション装置において、検出された自車位置と地図データを参照して(S1)、検出された当該対象物までの距離を指示する信号の強度の変化に応じて(S2,S3,S6)、自車の走行状態を検知する(S4,S7,S8)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車載用ナビゲーション装置に関し、特に、2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所を自車が走行しているときの走行状態を検知するのに有用な技術に関する。
【0002】
なお、以下の記述において用いる「走行状態」という用語は、自車の現在位置や方位、車両速度など「車両自体の状態」を指すのはもちろんのこと、自車がいずれの道路を走行しているのか、又はどのような状況下で走行しているのかなど「車両周辺の状態」をも指すものとする。
【背景技術】
【0003】
従来知られている典型的な車載用ナビゲーション装置には、ナビゲーションに係る一切の処理を制御するCPU、地図データを格納したDVD−ROMやHDD等の記憶装置、画面を通して案内情報を提供するディスプレイ装置、自車の現在位置を検出するためのGPS (Global Positioning System ) 受信機、自車の進行方位や走行速度等を検出するための3D(三次元)ジャイロや車速センサ等、さらには交通情報を受信するためのVICS (Vehicle Information and Communication System) 受信機等が設けられている。そして、CPUにより、自車の現在位置を含む地図データを記憶装置から読み出し、この地図データに基づいて自車位置の周囲の地図画像をディスプレイ画面に描画すると共に、自車の現在位置を指示する自車位置マークをディスプレイ画面に重ね合わせて表示し、自車の移動に応じて地図画像をスクロール表示したり、あるいは地図画像を画面に固定して自車位置マークを移動させたりして、自車が現在何処を走行しているのかを一目で判るようにしている。
【0004】
また、車載用ナビゲーション装置には、通常、ユーザが目的地に向けて道路を間違うことなく容易に走行できるように案内する機能(経路誘導機能)が搭載されている。この経路誘導機能によれば、CPUにより、地図データを用いて出発地(典型的には自車の現在位置)から目的地までを結ぶ最適な経路を、横型探索法やダイクストラ法等のシミュレーション計算を行って探索し、その探索した経路を誘導経路として記憶しておき、走行中、地図画像上にその誘導経路を他の道路とは識別可能に(例えば、色を変えたり、線幅を太くして)表示したり、また自車が誘導経路上で進路を変更すべき交差点に所定距離内に近づいたとき、地図画像上にその交差点の拡大図を表示したりすることで、目的地に向けた最適な経路をユーザが把握できるようになっている。
【0005】
かかる従来技術に関連する技術としては、例えば、特許文献1に記載されるように、トンネルや料金所のような天井のある道路施設への自車両の進入を正確に検出できるようにしたものがある。
【特許文献1】特開平7−306053号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述したように従来の車載用ナビゲーション装置では、自車の現在位置と地図データを参照して経路誘導機能により目的地に向けた経路案内を行うようにしている。この経路案内に際し、現状の技術では、3D(三次元)ジャイロ、GPSなどを使用して自車が走行している標高を推定しているが、GPS衛星から送られてくる電波が高層ビルなどによって遮られたり、トンネル内を走行中のときはGPS電波の受信が困難となるため、検知誤差が生じる場合がある。
【0007】
特に、都市部の高速道路等のように2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所(以下、便宜上「平行道路」という)を走行しているときに検知誤差が生じ易く、その場合に、自車がいずれの道路を走行しているのかの判別がつかないときがある。つまり、自車が走行している標高を算出するにあたり間違った判別をすることがある。例えば、2層の平行道路において実際は上側の道路を走行しているのに、ナビゲーション装置では検知誤差のために「下側の道路を走行している」と誤判断してしまうことがある。また、2層の平行道路のうち一方の道路にトンネルが有る場合に、実際はそのトンネル内を走行しているのに、ナビゲーション装置では検知誤差のために「他方のトンネルの無い方の道路を走行している」と誤判断してしまうこともあり得る。
【0008】
このように検知誤差が生じると自車の走行状態の検知精度が損なわれるため、この検知された結果に基づいて行われる経路案内が不正確なものとなり、ひいてはナビゲーション機能の信頼性が損なわれるといった課題があった。
【0009】
本発明は、かかる従来技術における課題に鑑み創作されたもので、平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の従来技術の課題を解決するため、本発明の基本形態によれば、地図データを格納したメモリ手段と、自車の現在位置を検出する位置検出手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信する信号発信手段と、発信された信号に対する対象物からの反射信号を受信した場合に該反射信号から当該対象物までの距離を検出する対象物検出手段と、前記メモリ手段、位置検出手段、信号発信手段及び対象物検出手段に動作可能に接続された制御手段とを具備し、前記制御手段は、検出された自車の現在位置と前記地図データを参照し、検出された当該対象物までの距離を指示する信号の強度の変化に応じて自車の走行状態を検知することを特徴とする車載用ナビゲーション装置が提供される。
【0011】
本発明に係る車載用ナビゲーション装置によれば、経路案内中に自車が走行している標高を推定(算出)するにあたり、GPS等の位置検出手段により検出された自車の現在位置と地図データのみを参照するのではなく、信号発信手段と対象物検出手段の協働作用に基づいて検出された当該対象物(反射物体)までの距離を指示する信号の強度の変化も併せて参照するようにしている。これにより、例えば、上述したような平行道路(2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所)を走行している場合でも、自車の標高をより正確に算出することができるので、自車がいずれの道路を走行しているのか(走行状態)を高精度で検知することが可能となる。このことは、その検知結果に基づいて行われる経路案内の正確さの向上、ひいてはナビゲーション機能の信頼性の向上に大いに寄与するものである。
【0012】
本発明に係る車載用ナビゲーション装置の他の構成上の特徴及びその詳細な動作(処理内容)については、後述する発明の実施の形態を参照しながら説明する。
【発明を実施するための最良の形態】
【0013】
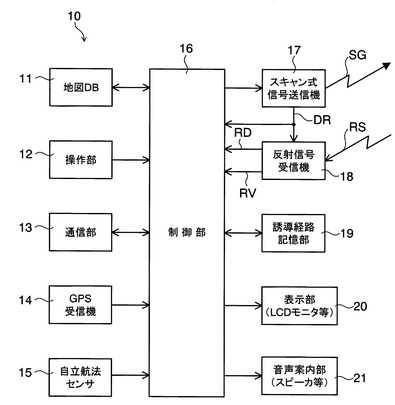
図1は本発明の一実施形態に係る車載用ナビゲーション装置の構成を概略的に示したものである。
【0014】
本実施形態に係る車載用ナビゲーション装置10は、基本的には、現状の技術で使用されている車載用ナビゲーション装置の構成と同等の構成を有しており、後述するように特定の走行環境下(2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所を走行している状態)で自車の走行状態(車両周辺の状態」をどのようにして検知するかの処理の態様において特徴を有している。この車載用ナビゲーション装置10は、図示のように地図データベース(DB)11、操作部12、通信部13、GPS受信機14、自立航法センサ15、制御部16、スキャン式信号送信機17、反射信号受信機18、誘導経路記憶部19、表示部20及び音声案内部21を備えている。
【0015】
地図DB11には、各縮尺レベル(1/12500、1/25000、1/50000等)に応じて適当な大きさの経度幅及び緯度幅に区切られた地図データが格納され、この地図データには、表示用の道路データ、経路探索用の道路データ、各種施設(ガソリンスタンド、コンビニエンスストア、ファミリーレストラン等)の位置や名称等に関するデータなどが含まれており、各データは、経緯度で表現された点(ノード)の座標集合で表されている。操作部12は、ユーザが指示もしくは設定(選択)した情報を入力するためのものであり、例えば、リモコン送信機の形態を有している。特に図示はしないが、このリモコン送信機には、LCDモニタ等の画面上の各種メニュー、各種項目等を選択したり、選択したメニュー等を実行させるための各種操作ボタン、ジョイスティックなどが適宜設けられている。
【0016】
通信部13は、各種情報を配信する情報センタや他の車両に搭載された車載装置等との間で通信を行うためのものであり、例えば、車載電話や携帯電話等からなる。GPS受信機14は、GPS衛星から送られてくる電波(GPS信号)に基づいて自車の現在位置の経度及び緯度を検出するためのものである。自立航法センサ15は、自車の進行方位や車速等を検出するためのものであり、3D(三次元)ジャイロ等の角度センサ、回転数に基づいた一定の走行距離毎にパルスを発生する距離センサなどから構成されている。
【0017】
制御部16はマイクロコンピュータ等により構成され、基本的には、ナビゲーション用の制御プログラムに従い、GPS受信機14から出力される信号に基づいて自車の現在位置を検出したり、自立航法センサ15から出力される信号に基づいて自車の方位や走行速度を検出したり、地図DB11から読み出した地図データを用いて設定された探索条件で出発地(自車の現在位置)から目的地までの誘導経路を探索するなど、ナビゲーションに係る種々の処理を行うものである。さらに制御部16は、後述するように本装置10において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理を制御する機能を有している。
【0018】
スキャン式信号送信機17は、制御部16からの制御に基づいて自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号ビーム(発信信号SG)を走査発信するものであり、特に図示はしないが、車両の上側(屋根)の前方近傍において適当な箇所に設けられている。スキャン式信号送信機17から所定の方向に向けて発信された信号SGは、当該方向に何らかの物体(対象物)が有れば当該物体で反射され、反射信号RSとして戻ってくる。また、スキャン式信号送信機17では、ビーム発信する各方向毎に当該方向を指示する角度情報(クロック)DRが生成され、制御部16と反射信号受信機18にそれぞれ供給されている。反射信号受信機18では、この角度情報(クロック)DRに基づき、スキャン式信号送信機17から走査発信された信号SGに同期して各方向毎に当該物体からの反射信号RSを受信する。さらに反射信号受信機18は、その反射信号RSから当該物体までの距離(反射距離信号RD)と、当該物体に対する自車の相対速度(相対速度信号RV)を検出するセンサとして機能する。
【0019】
スキャン式信号送信機17の形態としては、ミリ波レーダ、レーザ、超音波発信器、赤外線送信器などを使用することができる。但し、反射物体までの距離や相対速度を正確に測るためには(また、他車からの発信や何らかの反射信号を受信することに起因する誤判定を少なくするためにも)、発信される信号ビームの広がりは極力小さい(つまり、指向性が鋭い)方が望ましい。また、発信信号に所定の変調処理を施す(例えば、自己を識別する情報(ID)を信号に付加して発信する)ことにより、誤判定をより一層少なくすることが期待できる。この点から、スキャン式信号送信機17の信号発信源としてレーザを使用するのが望ましい。レーザは、ビーム幅が非常に狭いため指向性が鋭く、しかも、発信時に信号を符号化(エンコーディング)することによって受信時に自己の発信信号かどうかを容易に検知できるからである。
【0020】
誘導経路記憶部19は、制御部16によって探索された誘導経路の出発地から目的地までの全てのノード(経緯度で表現された点の座標)に関するデータを格納しておくためのものである。表示部20はLCDモニタ等からなり、制御部16からの制御に基づいて、ナビゲーションに係る案内情報(自車の現在位置の周囲の地図、出発地から目的地までの誘導経路、自車の現在位置を示すマーク等)を画面上に表示するものである。音声案内部21はスピーカ等からなり、制御部16からの制御に基づいて、上記のナビゲーションに係る案内情報を音声出力するものである。
【0021】
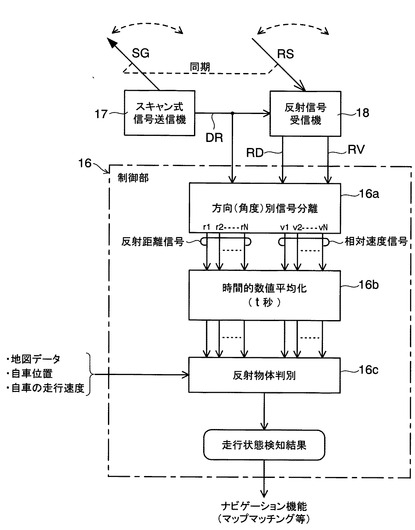
図2は、制御部16が行う処理のうち本発明に関連する処理(自車の走行状態の検知)を行うための機能ブロックを概略的に示したものである。
【0022】
制御部16は、図示のように、方向(角度)別信号分離を行う処理部16aと、時間的数値平均化を行う処理部16bと、反射物体判別を行う処理部16cとを有している。方向(角度)別信号分離処理部16aは、スキャン式信号送信機17から供給される角度情報(クロック)DRに基づいて、反射信号受信機18から出力される反射距離信号RD及び相対速度信号RVをそれぞれ各方向(角度)別に反射距離信号r1〜rN及び相対速度信号v1〜vNに分離する。時間的数値平均化処理部16bは、方向(角度)別信号分離処理部16aから出力される反射距離信号r1〜rN及び相対速度信号v1〜vNを所定の時間:t秒(例えば、10秒程度)に亘って受信し、その間の各信号の強度の平均値を算出する。反射物体判別処理部16cは、制御部16の外部から供給されるデータ(地図データ、自車位置、自車の走行速度)と、時間的数値平均化処理部16bを通して時間的に平均化された反射距離信号r1〜rN及び相対速度信号v1〜vNから、当該反射物体が何であるかを判別する。この判別された結果は「走行状態検知結果」として外部に出力され、マップマッチング等のナビゲーション機能に利用される。なお、ここでいう「走行状態検知結果」とは、後述するように自車がいずれの道路を走行しているのか、又はどのような状況下で走行しているのかなどを指示する情報をいう。
【0023】
以上の車載用ナビゲーション装置10において、地図DB11は「メモリ手段」に、GPS受信機14は「位置検出手段」に、自立航法センサ15は「車速検出手段」に、制御部16は「制御手段」に、スキャン式信号送信機17は「信号発信手段」に、反射信号受信機18は「対象物検出手段」に、それぞれ対応している。
【0024】
以下、本実施形態の車載用ナビゲーション装置10において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理について、その一例を示す図3及び図4の処理フローと共に、これを補足説明するための図5〜図12を参照しながら説明する。
【0025】
先ず、本装置の初期状態として、経路誘導機能により設定された目的地に向けて自車が道路上を走行しており、スキャン式信号送信機17からは自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号ビーム(発信信号SG)を走査発信しており、反射信号受信機18では、その走査発信された信号に同期して当該物体から反射信号RSを受信し、その反射信号RSから当該物体までの距離(反射距離信号RD)と、当該物体に対する自車の相対速度(相対速度信号RV)を検出しているものとする。
【0026】
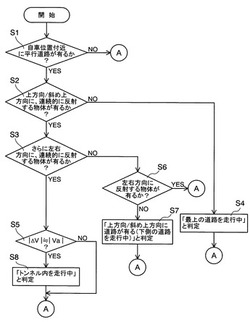
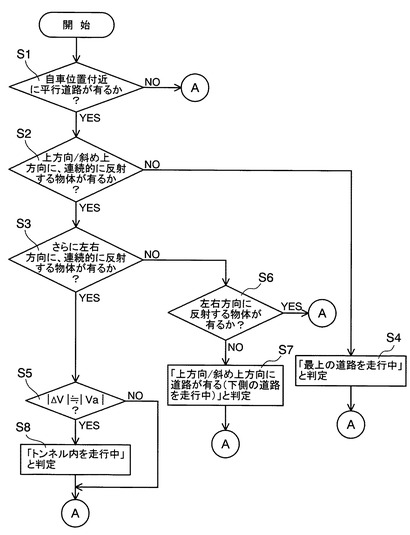
このような状態で、先ず最初のステップS1では、制御部16において、GPS受信機14の出力から検出した自車の現在位置と地図DB11を参照して、自車位置付近に平行道路が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS2に進み、判定結果がNOの場合にはステップS9(図4)に進む。ここでいう「平行道路」とは、2本以上の道路がほぼ平行に上下又は斜め上下に配置されている状態にある各々の道路をいう。
【0027】
次のステップS2では、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、上方向又は斜め上方向に、発信信号SGに対して連続的に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS3に進み、判定結果がNOの場合にはステップS4に進む。
【0028】
ここでいう「連続的に反射する物体」とは、道路やトンネル等のように走行方向と同じ方向に長い構造物(物体)を指している。つまり、発信信号SGに対して当該物体から反射信号RSを所定の時間(例えば、10秒程度)に亘って平均的な信号強度で受信した場合には、その物体が道路やトンネル等であると判断することができる。言い換えると、反射する物体が有っても「連続的に」存在していなければ、その物体が道路やトンネル等である可能性は殆ど無いことを意味する。
【0029】
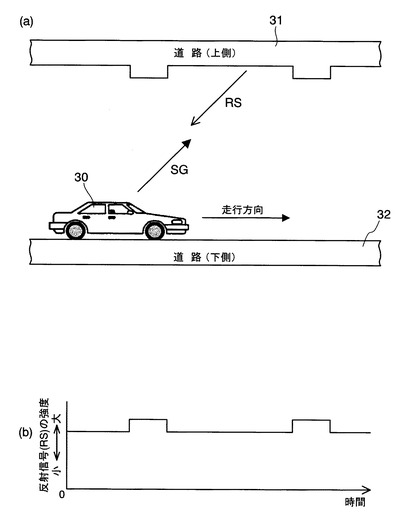
この「連続的に反射する物体」の検知例を図5に示す。図示の例では、自車30から上方向/斜め上方向に向けて発信した信号ビームSGが当該物体(上側の道路31)で反射され、反射信号RSとして戻ってくる様子を示している(同図(a))。そして、この反射信号RSの強度が継続して平均的なレベルで受信されていることを検出することで(同図(b))、上方向/斜め上方向に連続的な反射物体(道路31)が有ると判定することができる。つまり、自車は平行道路のうち下側の道路32を走行中であると判断することができる。
【0030】
再び図3を参照すると、ステップS4では(上方向/斜め上方向に連続的な反射物体が無い場合)、制御部16において、自車は上記の平行道路のうち「最上の道路を走行中」と判定する。そして、ステップS9(図4)に進む。
【0031】
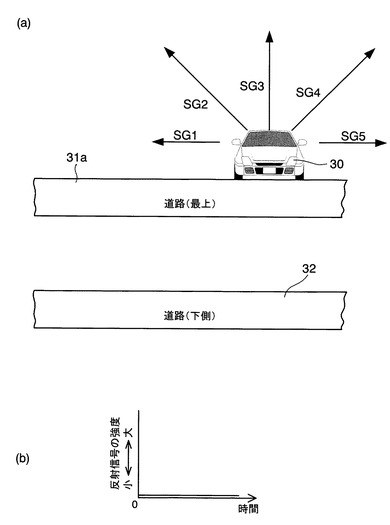
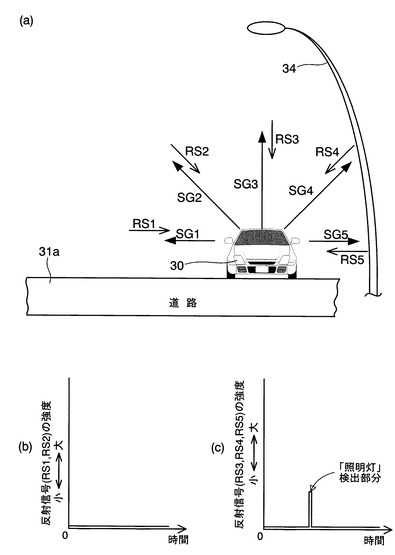
この「最上の道路を走行中」の検知例を図6〜図8に示す。図6の例では、説明の簡単化のため、自車30(スキャン式信号送信機17)から上方向、斜め上方向及び左右方向の5方向に固定的に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図6(a))。この場合、発信した信号ビームSG1〜SG5に対して実質的な反射信号は検出されないため(図6(b))、自車30から見て上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。
【0032】
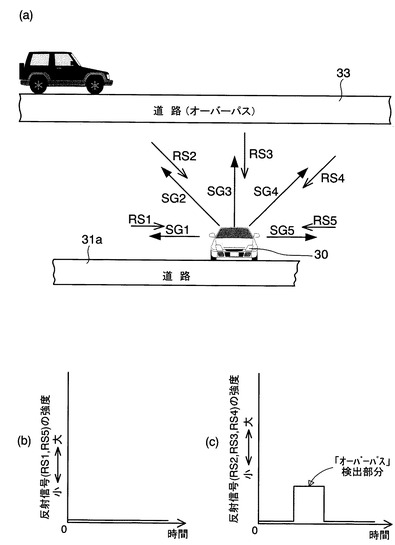
また、図7の例では、図6の場合と同様に最上の道路31aを走行中で、その上にオーバーパス(陸橋)33が配置されている場合の様子を示している(図7(a))。この場合、自車30がオーバーパス33の直下を通過した時に、上方向/斜め上方向に向けて発信した信号ビーム(発信信号SG2〜SG4)に対する反射信号RS2〜RS4を一時的に検出するが(図7(c)の「オーバーパス」検出部分)、当該反射信号の強度は継続して平均的なレベルで受信されていないので、上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。なお、左右方向に向けて発信した信号ビーム(発信信号SG1、SG5)に対しては実質的な反射信号RS1、RS5は検出されない(図7(b))。
【0033】
同様に、図8の例では、図6の場合と同様に最上の道路31aを走行中で、その上に道路照明灯34が配置されている場合の様子を示している(図8(a))。この場合も、自車30が照明灯34の横を通過した時に、上方向、左側斜め上方向及び左方向に向けて発信した信号ビーム(発信信号SG3〜SG5)に対する反射信号RS3〜RS5を一時的に検出するが(図8(c)の「照明灯」検出部分)、当該反射信号の強度は継続して平均的なレベルで受信されていないので、上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。なお、右方向及び右側斜め上方向に向けて発信した信号ビーム(発信信号SG1、SG2)に対しては実質的な反射信号RS1、RS2は検出されない(図8(b))。
【0034】
再び図3を参照すると、ステップS3では(上方向/斜め上方向に連続的な反射物体が有る場合)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、さらに左右方向に、発信信号SGに対して連続的に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS5に進み、判定結果がNOの場合にはステップS6に進む。ここでいう「連続的に反射する物体」も上記と同様である。
【0035】
ステップS6では(上方向/斜め上方向に連続的な反射物体が有るが、左右方向には連続的な反射物体が無い場合)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、左右方向に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS9(図4)に進み、判定結果がNOの場合にはステップS7に進む。ここでいう「反射する物体」とは、上記の「連続的に反射する物体」以外の構造物(物体)を指している。
【0036】
ステップS7では(上方向/斜め上方向に連続的な反射物体が有るが、左右方向には連続/不連続を問わず反射物体が無い場合)、制御部16において、「上方向/斜め上方向に道路が有る」、すなわち、自車は上記の平行道路のうち「下側の道路を走行中」と判定する。そして、ステップS9(図4)に進む。
【0037】
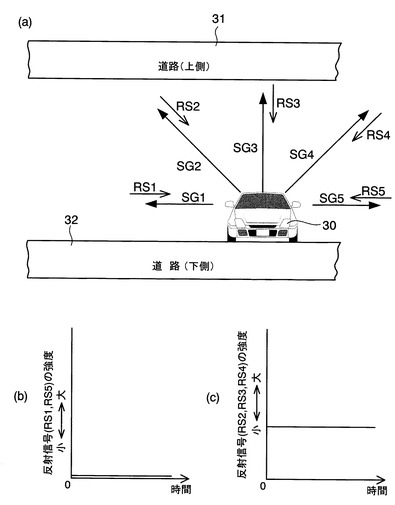
この「下側の道路を走行中」の検知例を図9及び図10に示す。図9の例では、図6〜図8の場合と同様に、自車30(スキャン式信号送信機17)から上方向、斜め上方向及び左右方向の5方向に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図9(a))。この場合、上方向/斜め上方向に向けて発信した信号ビーム(発信信号SG2〜SG4)に対する反射信号RS2〜RS4を継続して平均的な信号強度で受信しているので(図9(c))、上方向/斜め上方向に連続的な反射物体(上側の道路31)が有ると判断し、自車30は平行道路のうち下側の道路32を走行中であると判定することができる。なお、左右方向に向けて発信した信号ビーム(発信信号SG1、SG5)に対しては実質的な反射信号RS1、RS5は検出されない(図9(b))。
【0038】
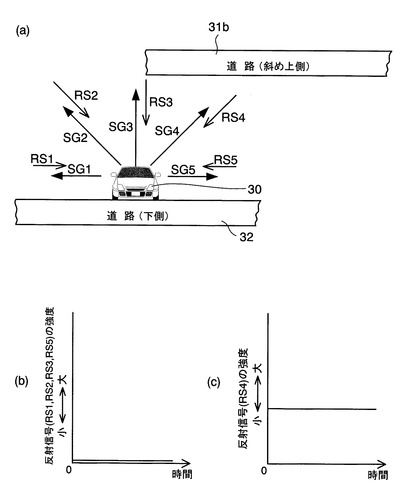
また、図10の例では、図9の場合と同様に5方向に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図10(a))。この場合、左側斜め上方向に向けて発信した信号ビーム(発信信号SG4)に対する反射信号RS4を継続して平均的な信号強度で受信し(図10(c))、それ以外の方向に向けて発信した信号ビームに対しては実質的な反射信号RS1〜RS3、RS5は検出されないので(図10(b))、左側斜め上方向に連続的な反射物体(斜め上側の道路31b)が有ると判断し、自車30は平行道路のうち下側の道路32を走行中であると判定することができる。
【0039】
再び図3を参照すると、ステップS5では(上方向/斜め上方向に連続的な反射物体が有り、かつ、左右方向に連続的な反射物体が有る場合)、制御部16において、反射信号受信機18から出力された相対速度信号RVから算出した自車の相対速度(ΔVとする)の絶対値と、自立航法センサ15から出力された信号から算出した自車の走行速度(Vaとする)の絶対値を比較し、|ΔV|≒|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合(つまり、当該反射物体が動いていない場合)にはステップS8に進み、判定結果がNOの場合にはステップS9(図4)に進む。
【0040】
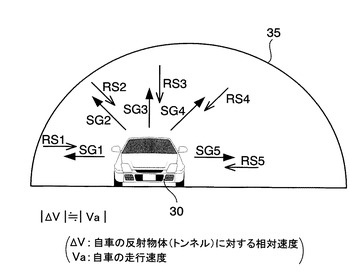
ステップS8では(上方向/斜め上方向及び左右方向に連続的な反射物体が有るが、それが動いていない場合)、制御部16において、自車は「トンネル内を走行中」と判定する。この場合の検知例を図11に示す。そして、ステップS9(図4)に進む。
【0041】
なお、図示の処理フローでは、自車の相対速度の絶対値|ΔV|と自車の走行速度の絶対値|Va|の比較(ステップS5)に基づいて「トンネル内を走行中」かどうかの判定を行っているが(ステップS8)、この判定を行うにあたり速度の比較処理は必ずしも行う必要はない。要は、自車30からの発信信号SG1〜SG5(図11)に対して当該物体35から反射信号RS1〜RS5をそれぞれ所定の時間に亘って継続的に平均的な信号強度で受信したかどうかを検出すれば十分であり、そのように検出した場合に当該物体はトンネル35である(つまり、トンネル内を走行中)と判断することができる。
【0042】
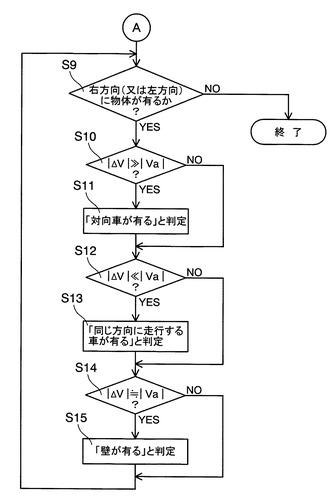
次のステップS9では(図4)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、右方向(又は左方向)に物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS10に進み、判定結果がNOの場合には本処理フローは「終了」となる。
【0043】
次のステップS10では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS5で行った処理と同様にして自車の相対速度の絶対値|ΔV|と自車の走行速度の絶対値|Va|を比較し、|ΔV|≫|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS11に進み、判定結果がNOの場合にはステップS12に進む。
【0044】
ステップS11では(相対速度の絶対値が自車速度の絶対値よりも大きい場合)、制御部16において、当該反射物体は自車と反対方向に移動している(すなわち、自車から見て右方向(又は左方向)に「対向車が有る」)と判定する。
【0045】
次のステップS12では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS10で行った処理と同様にして相対速度の絶対値|ΔV|と自車速度の絶対値|Va|を比較し、|ΔV|≪|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS13に進み、判定結果がNOの場合にはステップS14に進む。
【0046】
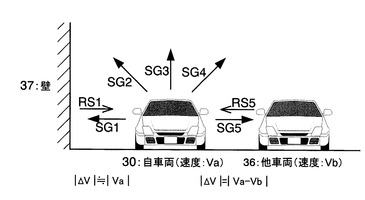
ステップS13では(相対速度の絶対値が自車速度の絶対値よりも小さい場合)、制御部16において、当該反射物体は自車と同じ方向に移動している(すなわち、自車から見て右方向(又は左方向)に「同じ方向に走行する車が有る」)と判定する。この場合の検知例を図12に示す。図示の例では、自車両30の左方向に「同じ方向に走行する他車両36が有る」ことを検知している。
【0047】
次のステップS14では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS10で行った処理と同様にして相対速度の絶対値|ΔV|と自車速度の絶対値|Va|を比較し、|ΔV|≒|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合(つまり、当該反射物体が動いていない場合)にはステップS15に進み、判定結果がNOの場合にはステップS9に戻って上記の処理を繰り返す。
【0048】
ステップS15では(相対速度の絶対値と自車速度の絶対値がほぼ等しい場合)、制御部16において、当該反射物体は静止している(すなわち、自車から見て右方向(又は左方向)に「壁が有る」)と判定する。この場合の検知例を図12に示す。図示の例では、自車両30の右方向に「壁37が有る」ことを検知している。この後、ステップS9に戻って上記の処理を繰り返す。
【0049】
以上説明したように、本実施形態に係る車載用ナビゲーション装置10によれば、制御部16により、ナビゲーション機能に基づいて経路案内中に自車が走行している標高を推定(算出)するにあたり、GPS受信機14の出力から検出された自車の現在位置と地図DB11のみを参照するのではなく、スキャン式信号送信機17と反射信号受信機18の協働作用に基づいて検出された反射物体までの距離を指示する信号(反射距離信号RD)の強度の変化も併せて参照するようにしている。
【0050】
これにより、自車が平行道路を走行している場合でも(図6〜図11)、自車の標高をより正確に算出することができるので、自車の走行状態(いずれの道路を走行しているのか、又はどのような状況下で走行しているのか)を高精度で検知することが可能となる。このことは、その検知結果に基づいて行われる経路案内の正確さの向上、ひいてはナビゲーション機能の信頼性の向上に大いに寄与する。
【0051】
また、スキャン式信号送信機17と反射信号受信機18の協働作用に基づいて検出された反射物体に対する自車の相対速度を指示する信号(相対速度信号RV)の強度の変化も併せて参照するようにしているので、自車の左右方向に存在する反射物体(図12の他車両36、壁37など)の判別も行うことができる。
【0052】
上述した実施形態では、反射物体までの距離と反射物体に対する自車の相対速度を検出するためにスキャン式信号送信機17を用いた場合を例にとって説明したが、本発明の要旨からも明らかなように、信号ビームを発信する形態はスキャン式に限定されないことはもちろんである。図6〜図12に例示する応用例からも分かるように、自車の向きに対し横方向を含む面内で少なくとも上方向と斜め上方向と左右方向の計5方向に向けて信号ビームを発信できれば十分であり、スキャン式信号送信機17の代わりに、各方向に向けて信号ビームを個々に発信できるように5箇所に分けて信号発信器を設けてもよい。また、設置個数は5個に限定されず、6個以上設けてもよいことはもちろんである。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態に係る車載用ナビゲーション装置の構成を概略的に示すブロック図である。
【図2】図1における制御部の本発明に関連する処理を行うための機能を概略的に示すブロック図である。
【図3】図1の車載用ナビゲーション装置において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理の一例を示すフロー図(その1)である。
【図4】図1の車載用ナビゲーション装置において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理の一例を示すフロー図(その2)である。
【図5】図3の処理フローにおいてステップS2で行う処理を補足説明するための図である。
【図6】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その1)である。
【図7】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その2)である。
【図8】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その3)である。
【図9】図3の処理フローにおいてステップS7で行う処理を補足説明するための図(その1)である。
【図10】図3の処理フローにおいてステップS7で行う処理を補足説明するための図(その2)である。
【図11】図3の処理フローにおいてステップS8で行う処理を補足説明するための図である。
【図12】図4の処理フローにおいてステップS13、S15で行う処理を補足説明するための図である。
【符号の説明】
【0054】
10…車載用ナビゲーション装置、
11…地図DB(メモリ手段)、
14…GPS受信機(位置検出手段)、
15…自立航法センサ(車速検出手段)、
16…制御部(制御手段)、
16a〜16c…制御部の各処理部、
17…スキャン式信号送信機(信号発信手段)、
18…反射信号受信機(対象物検出手段)、
30…自車、
31,31a,31b,32…道路(対象物/反射物体)、
35…トンネル(対象物/反射物体)、
36…他車両(対象物/反射物体)、
37…壁(対象物/反射物体)、
DR…角度情報(クロック)、
SG,SG1〜SG5…発信信号、
RS,RS1〜RS5…反射信号、
RD…反射距離信号、
RV…相対速度信号。
【技術分野】
【0001】
本発明は車載用ナビゲーション装置に関し、特に、2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所を自車が走行しているときの走行状態を検知するのに有用な技術に関する。
【0002】
なお、以下の記述において用いる「走行状態」という用語は、自車の現在位置や方位、車両速度など「車両自体の状態」を指すのはもちろんのこと、自車がいずれの道路を走行しているのか、又はどのような状況下で走行しているのかなど「車両周辺の状態」をも指すものとする。
【背景技術】
【0003】
従来知られている典型的な車載用ナビゲーション装置には、ナビゲーションに係る一切の処理を制御するCPU、地図データを格納したDVD−ROMやHDD等の記憶装置、画面を通して案内情報を提供するディスプレイ装置、自車の現在位置を検出するためのGPS (Global Positioning System ) 受信機、自車の進行方位や走行速度等を検出するための3D(三次元)ジャイロや車速センサ等、さらには交通情報を受信するためのVICS (Vehicle Information and Communication System) 受信機等が設けられている。そして、CPUにより、自車の現在位置を含む地図データを記憶装置から読み出し、この地図データに基づいて自車位置の周囲の地図画像をディスプレイ画面に描画すると共に、自車の現在位置を指示する自車位置マークをディスプレイ画面に重ね合わせて表示し、自車の移動に応じて地図画像をスクロール表示したり、あるいは地図画像を画面に固定して自車位置マークを移動させたりして、自車が現在何処を走行しているのかを一目で判るようにしている。
【0004】
また、車載用ナビゲーション装置には、通常、ユーザが目的地に向けて道路を間違うことなく容易に走行できるように案内する機能(経路誘導機能)が搭載されている。この経路誘導機能によれば、CPUにより、地図データを用いて出発地(典型的には自車の現在位置)から目的地までを結ぶ最適な経路を、横型探索法やダイクストラ法等のシミュレーション計算を行って探索し、その探索した経路を誘導経路として記憶しておき、走行中、地図画像上にその誘導経路を他の道路とは識別可能に(例えば、色を変えたり、線幅を太くして)表示したり、また自車が誘導経路上で進路を変更すべき交差点に所定距離内に近づいたとき、地図画像上にその交差点の拡大図を表示したりすることで、目的地に向けた最適な経路をユーザが把握できるようになっている。
【0005】
かかる従来技術に関連する技術としては、例えば、特許文献1に記載されるように、トンネルや料金所のような天井のある道路施設への自車両の進入を正確に検出できるようにしたものがある。
【特許文献1】特開平7−306053号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述したように従来の車載用ナビゲーション装置では、自車の現在位置と地図データを参照して経路誘導機能により目的地に向けた経路案内を行うようにしている。この経路案内に際し、現状の技術では、3D(三次元)ジャイロ、GPSなどを使用して自車が走行している標高を推定しているが、GPS衛星から送られてくる電波が高層ビルなどによって遮られたり、トンネル内を走行中のときはGPS電波の受信が困難となるため、検知誤差が生じる場合がある。
【0007】
特に、都市部の高速道路等のように2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所(以下、便宜上「平行道路」という)を走行しているときに検知誤差が生じ易く、その場合に、自車がいずれの道路を走行しているのかの判別がつかないときがある。つまり、自車が走行している標高を算出するにあたり間違った判別をすることがある。例えば、2層の平行道路において実際は上側の道路を走行しているのに、ナビゲーション装置では検知誤差のために「下側の道路を走行している」と誤判断してしまうことがある。また、2層の平行道路のうち一方の道路にトンネルが有る場合に、実際はそのトンネル内を走行しているのに、ナビゲーション装置では検知誤差のために「他方のトンネルの無い方の道路を走行している」と誤判断してしまうこともあり得る。
【0008】
このように検知誤差が生じると自車の走行状態の検知精度が損なわれるため、この検知された結果に基づいて行われる経路案内が不正確なものとなり、ひいてはナビゲーション機能の信頼性が損なわれるといった課題があった。
【0009】
本発明は、かかる従来技術における課題に鑑み創作されたもので、平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記の従来技術の課題を解決するため、本発明の基本形態によれば、地図データを格納したメモリ手段と、自車の現在位置を検出する位置検出手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信する信号発信手段と、発信された信号に対する対象物からの反射信号を受信した場合に該反射信号から当該対象物までの距離を検出する対象物検出手段と、前記メモリ手段、位置検出手段、信号発信手段及び対象物検出手段に動作可能に接続された制御手段とを具備し、前記制御手段は、検出された自車の現在位置と前記地図データを参照し、検出された当該対象物までの距離を指示する信号の強度の変化に応じて自車の走行状態を検知することを特徴とする車載用ナビゲーション装置が提供される。
【0011】
本発明に係る車載用ナビゲーション装置によれば、経路案内中に自車が走行している標高を推定(算出)するにあたり、GPS等の位置検出手段により検出された自車の現在位置と地図データのみを参照するのではなく、信号発信手段と対象物検出手段の協働作用に基づいて検出された当該対象物(反射物体)までの距離を指示する信号の強度の変化も併せて参照するようにしている。これにより、例えば、上述したような平行道路(2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所)を走行している場合でも、自車の標高をより正確に算出することができるので、自車がいずれの道路を走行しているのか(走行状態)を高精度で検知することが可能となる。このことは、その検知結果に基づいて行われる経路案内の正確さの向上、ひいてはナビゲーション機能の信頼性の向上に大いに寄与するものである。
【0012】
本発明に係る車載用ナビゲーション装置の他の構成上の特徴及びその詳細な動作(処理内容)については、後述する発明の実施の形態を参照しながら説明する。
【発明を実施するための最良の形態】
【0013】
図1は本発明の一実施形態に係る車載用ナビゲーション装置の構成を概略的に示したものである。
【0014】
本実施形態に係る車載用ナビゲーション装置10は、基本的には、現状の技術で使用されている車載用ナビゲーション装置の構成と同等の構成を有しており、後述するように特定の走行環境下(2本以上の道路がほぼ平行に上下又は斜め上下に配置されている場所を走行している状態)で自車の走行状態(車両周辺の状態」をどのようにして検知するかの処理の態様において特徴を有している。この車載用ナビゲーション装置10は、図示のように地図データベース(DB)11、操作部12、通信部13、GPS受信機14、自立航法センサ15、制御部16、スキャン式信号送信機17、反射信号受信機18、誘導経路記憶部19、表示部20及び音声案内部21を備えている。
【0015】
地図DB11には、各縮尺レベル(1/12500、1/25000、1/50000等)に応じて適当な大きさの経度幅及び緯度幅に区切られた地図データが格納され、この地図データには、表示用の道路データ、経路探索用の道路データ、各種施設(ガソリンスタンド、コンビニエンスストア、ファミリーレストラン等)の位置や名称等に関するデータなどが含まれており、各データは、経緯度で表現された点(ノード)の座標集合で表されている。操作部12は、ユーザが指示もしくは設定(選択)した情報を入力するためのものであり、例えば、リモコン送信機の形態を有している。特に図示はしないが、このリモコン送信機には、LCDモニタ等の画面上の各種メニュー、各種項目等を選択したり、選択したメニュー等を実行させるための各種操作ボタン、ジョイスティックなどが適宜設けられている。
【0016】
通信部13は、各種情報を配信する情報センタや他の車両に搭載された車載装置等との間で通信を行うためのものであり、例えば、車載電話や携帯電話等からなる。GPS受信機14は、GPS衛星から送られてくる電波(GPS信号)に基づいて自車の現在位置の経度及び緯度を検出するためのものである。自立航法センサ15は、自車の進行方位や車速等を検出するためのものであり、3D(三次元)ジャイロ等の角度センサ、回転数に基づいた一定の走行距離毎にパルスを発生する距離センサなどから構成されている。
【0017】
制御部16はマイクロコンピュータ等により構成され、基本的には、ナビゲーション用の制御プログラムに従い、GPS受信機14から出力される信号に基づいて自車の現在位置を検出したり、自立航法センサ15から出力される信号に基づいて自車の方位や走行速度を検出したり、地図DB11から読み出した地図データを用いて設定された探索条件で出発地(自車の現在位置)から目的地までの誘導経路を探索するなど、ナビゲーションに係る種々の処理を行うものである。さらに制御部16は、後述するように本装置10において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理を制御する機能を有している。
【0018】
スキャン式信号送信機17は、制御部16からの制御に基づいて自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号ビーム(発信信号SG)を走査発信するものであり、特に図示はしないが、車両の上側(屋根)の前方近傍において適当な箇所に設けられている。スキャン式信号送信機17から所定の方向に向けて発信された信号SGは、当該方向に何らかの物体(対象物)が有れば当該物体で反射され、反射信号RSとして戻ってくる。また、スキャン式信号送信機17では、ビーム発信する各方向毎に当該方向を指示する角度情報(クロック)DRが生成され、制御部16と反射信号受信機18にそれぞれ供給されている。反射信号受信機18では、この角度情報(クロック)DRに基づき、スキャン式信号送信機17から走査発信された信号SGに同期して各方向毎に当該物体からの反射信号RSを受信する。さらに反射信号受信機18は、その反射信号RSから当該物体までの距離(反射距離信号RD)と、当該物体に対する自車の相対速度(相対速度信号RV)を検出するセンサとして機能する。
【0019】
スキャン式信号送信機17の形態としては、ミリ波レーダ、レーザ、超音波発信器、赤外線送信器などを使用することができる。但し、反射物体までの距離や相対速度を正確に測るためには(また、他車からの発信や何らかの反射信号を受信することに起因する誤判定を少なくするためにも)、発信される信号ビームの広がりは極力小さい(つまり、指向性が鋭い)方が望ましい。また、発信信号に所定の変調処理を施す(例えば、自己を識別する情報(ID)を信号に付加して発信する)ことにより、誤判定をより一層少なくすることが期待できる。この点から、スキャン式信号送信機17の信号発信源としてレーザを使用するのが望ましい。レーザは、ビーム幅が非常に狭いため指向性が鋭く、しかも、発信時に信号を符号化(エンコーディング)することによって受信時に自己の発信信号かどうかを容易に検知できるからである。
【0020】
誘導経路記憶部19は、制御部16によって探索された誘導経路の出発地から目的地までの全てのノード(経緯度で表現された点の座標)に関するデータを格納しておくためのものである。表示部20はLCDモニタ等からなり、制御部16からの制御に基づいて、ナビゲーションに係る案内情報(自車の現在位置の周囲の地図、出発地から目的地までの誘導経路、自車の現在位置を示すマーク等)を画面上に表示するものである。音声案内部21はスピーカ等からなり、制御部16からの制御に基づいて、上記のナビゲーションに係る案内情報を音声出力するものである。
【0021】
図2は、制御部16が行う処理のうち本発明に関連する処理(自車の走行状態の検知)を行うための機能ブロックを概略的に示したものである。
【0022】
制御部16は、図示のように、方向(角度)別信号分離を行う処理部16aと、時間的数値平均化を行う処理部16bと、反射物体判別を行う処理部16cとを有している。方向(角度)別信号分離処理部16aは、スキャン式信号送信機17から供給される角度情報(クロック)DRに基づいて、反射信号受信機18から出力される反射距離信号RD及び相対速度信号RVをそれぞれ各方向(角度)別に反射距離信号r1〜rN及び相対速度信号v1〜vNに分離する。時間的数値平均化処理部16bは、方向(角度)別信号分離処理部16aから出力される反射距離信号r1〜rN及び相対速度信号v1〜vNを所定の時間:t秒(例えば、10秒程度)に亘って受信し、その間の各信号の強度の平均値を算出する。反射物体判別処理部16cは、制御部16の外部から供給されるデータ(地図データ、自車位置、自車の走行速度)と、時間的数値平均化処理部16bを通して時間的に平均化された反射距離信号r1〜rN及び相対速度信号v1〜vNから、当該反射物体が何であるかを判別する。この判別された結果は「走行状態検知結果」として外部に出力され、マップマッチング等のナビゲーション機能に利用される。なお、ここでいう「走行状態検知結果」とは、後述するように自車がいずれの道路を走行しているのか、又はどのような状況下で走行しているのかなどを指示する情報をいう。
【0023】
以上の車載用ナビゲーション装置10において、地図DB11は「メモリ手段」に、GPS受信機14は「位置検出手段」に、自立航法センサ15は「車速検出手段」に、制御部16は「制御手段」に、スキャン式信号送信機17は「信号発信手段」に、反射信号受信機18は「対象物検出手段」に、それぞれ対応している。
【0024】
以下、本実施形態の車載用ナビゲーション装置10において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理について、その一例を示す図3及び図4の処理フローと共に、これを補足説明するための図5〜図12を参照しながら説明する。
【0025】
先ず、本装置の初期状態として、経路誘導機能により設定された目的地に向けて自車が道路上を走行しており、スキャン式信号送信機17からは自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号ビーム(発信信号SG)を走査発信しており、反射信号受信機18では、その走査発信された信号に同期して当該物体から反射信号RSを受信し、その反射信号RSから当該物体までの距離(反射距離信号RD)と、当該物体に対する自車の相対速度(相対速度信号RV)を検出しているものとする。
【0026】
このような状態で、先ず最初のステップS1では、制御部16において、GPS受信機14の出力から検出した自車の現在位置と地図DB11を参照して、自車位置付近に平行道路が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS2に進み、判定結果がNOの場合にはステップS9(図4)に進む。ここでいう「平行道路」とは、2本以上の道路がほぼ平行に上下又は斜め上下に配置されている状態にある各々の道路をいう。
【0027】
次のステップS2では、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、上方向又は斜め上方向に、発信信号SGに対して連続的に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS3に進み、判定結果がNOの場合にはステップS4に進む。
【0028】
ここでいう「連続的に反射する物体」とは、道路やトンネル等のように走行方向と同じ方向に長い構造物(物体)を指している。つまり、発信信号SGに対して当該物体から反射信号RSを所定の時間(例えば、10秒程度)に亘って平均的な信号強度で受信した場合には、その物体が道路やトンネル等であると判断することができる。言い換えると、反射する物体が有っても「連続的に」存在していなければ、その物体が道路やトンネル等である可能性は殆ど無いことを意味する。
【0029】
この「連続的に反射する物体」の検知例を図5に示す。図示の例では、自車30から上方向/斜め上方向に向けて発信した信号ビームSGが当該物体(上側の道路31)で反射され、反射信号RSとして戻ってくる様子を示している(同図(a))。そして、この反射信号RSの強度が継続して平均的なレベルで受信されていることを検出することで(同図(b))、上方向/斜め上方向に連続的な反射物体(道路31)が有ると判定することができる。つまり、自車は平行道路のうち下側の道路32を走行中であると判断することができる。
【0030】
再び図3を参照すると、ステップS4では(上方向/斜め上方向に連続的な反射物体が無い場合)、制御部16において、自車は上記の平行道路のうち「最上の道路を走行中」と判定する。そして、ステップS9(図4)に進む。
【0031】
この「最上の道路を走行中」の検知例を図6〜図8に示す。図6の例では、説明の簡単化のため、自車30(スキャン式信号送信機17)から上方向、斜め上方向及び左右方向の5方向に固定的に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図6(a))。この場合、発信した信号ビームSG1〜SG5に対して実質的な反射信号は検出されないため(図6(b))、自車30から見て上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。
【0032】
また、図7の例では、図6の場合と同様に最上の道路31aを走行中で、その上にオーバーパス(陸橋)33が配置されている場合の様子を示している(図7(a))。この場合、自車30がオーバーパス33の直下を通過した時に、上方向/斜め上方向に向けて発信した信号ビーム(発信信号SG2〜SG4)に対する反射信号RS2〜RS4を一時的に検出するが(図7(c)の「オーバーパス」検出部分)、当該反射信号の強度は継続して平均的なレベルで受信されていないので、上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。なお、左右方向に向けて発信した信号ビーム(発信信号SG1、SG5)に対しては実質的な反射信号RS1、RS5は検出されない(図7(b))。
【0033】
同様に、図8の例では、図6の場合と同様に最上の道路31aを走行中で、その上に道路照明灯34が配置されている場合の様子を示している(図8(a))。この場合も、自車30が照明灯34の横を通過した時に、上方向、左側斜め上方向及び左方向に向けて発信した信号ビーム(発信信号SG3〜SG5)に対する反射信号RS3〜RS5を一時的に検出するが(図8(c)の「照明灯」検出部分)、当該反射信号の強度は継続して平均的なレベルで受信されていないので、上方向/斜め上方向には連続的な反射物体が無いと判断し、自車30は平行道路のうち最上の道路31aを走行中であると判定することができる。なお、右方向及び右側斜め上方向に向けて発信した信号ビーム(発信信号SG1、SG2)に対しては実質的な反射信号RS1、RS2は検出されない(図8(b))。
【0034】
再び図3を参照すると、ステップS3では(上方向/斜め上方向に連続的な反射物体が有る場合)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、さらに左右方向に、発信信号SGに対して連続的に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS5に進み、判定結果がNOの場合にはステップS6に進む。ここでいう「連続的に反射する物体」も上記と同様である。
【0035】
ステップS6では(上方向/斜め上方向に連続的な反射物体が有るが、左右方向には連続的な反射物体が無い場合)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、左右方向に反射する物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS9(図4)に進み、判定結果がNOの場合にはステップS7に進む。ここでいう「反射する物体」とは、上記の「連続的に反射する物体」以外の構造物(物体)を指している。
【0036】
ステップS7では(上方向/斜め上方向に連続的な反射物体が有るが、左右方向には連続/不連続を問わず反射物体が無い場合)、制御部16において、「上方向/斜め上方向に道路が有る」、すなわち、自車は上記の平行道路のうち「下側の道路を走行中」と判定する。そして、ステップS9(図4)に進む。
【0037】
この「下側の道路を走行中」の検知例を図9及び図10に示す。図9の例では、図6〜図8の場合と同様に、自車30(スキャン式信号送信機17)から上方向、斜め上方向及び左右方向の5方向に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図9(a))。この場合、上方向/斜め上方向に向けて発信した信号ビーム(発信信号SG2〜SG4)に対する反射信号RS2〜RS4を継続して平均的な信号強度で受信しているので(図9(c))、上方向/斜め上方向に連続的な反射物体(上側の道路31)が有ると判断し、自車30は平行道路のうち下側の道路32を走行中であると判定することができる。なお、左右方向に向けて発信した信号ビーム(発信信号SG1、SG5)に対しては実質的な反射信号RS1、RS5は検出されない(図9(b))。
【0038】
また、図10の例では、図9の場合と同様に5方向に信号ビーム(発信信号SG1〜SG5)を発信している様子を示している(図10(a))。この場合、左側斜め上方向に向けて発信した信号ビーム(発信信号SG4)に対する反射信号RS4を継続して平均的な信号強度で受信し(図10(c))、それ以外の方向に向けて発信した信号ビームに対しては実質的な反射信号RS1〜RS3、RS5は検出されないので(図10(b))、左側斜め上方向に連続的な反射物体(斜め上側の道路31b)が有ると判断し、自車30は平行道路のうち下側の道路32を走行中であると判定することができる。
【0039】
再び図3を参照すると、ステップS5では(上方向/斜め上方向に連続的な反射物体が有り、かつ、左右方向に連続的な反射物体が有る場合)、制御部16において、反射信号受信機18から出力された相対速度信号RVから算出した自車の相対速度(ΔVとする)の絶対値と、自立航法センサ15から出力された信号から算出した自車の走行速度(Vaとする)の絶対値を比較し、|ΔV|≒|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合(つまり、当該反射物体が動いていない場合)にはステップS8に進み、判定結果がNOの場合にはステップS9(図4)に進む。
【0040】
ステップS8では(上方向/斜め上方向及び左右方向に連続的な反射物体が有るが、それが動いていない場合)、制御部16において、自車は「トンネル内を走行中」と判定する。この場合の検知例を図11に示す。そして、ステップS9(図4)に進む。
【0041】
なお、図示の処理フローでは、自車の相対速度の絶対値|ΔV|と自車の走行速度の絶対値|Va|の比較(ステップS5)に基づいて「トンネル内を走行中」かどうかの判定を行っているが(ステップS8)、この判定を行うにあたり速度の比較処理は必ずしも行う必要はない。要は、自車30からの発信信号SG1〜SG5(図11)に対して当該物体35から反射信号RS1〜RS5をそれぞれ所定の時間に亘って継続的に平均的な信号強度で受信したかどうかを検出すれば十分であり、そのように検出した場合に当該物体はトンネル35である(つまり、トンネル内を走行中)と判断することができる。
【0042】
次のステップS9では(図4)、制御部16において、反射信号受信機18から出力された反射距離信号RDに基づき、右方向(又は左方向)に物体が有る(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS10に進み、判定結果がNOの場合には本処理フローは「終了」となる。
【0043】
次のステップS10では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS5で行った処理と同様にして自車の相対速度の絶対値|ΔV|と自車の走行速度の絶対値|Va|を比較し、|ΔV|≫|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS11に進み、判定結果がNOの場合にはステップS12に進む。
【0044】
ステップS11では(相対速度の絶対値が自車速度の絶対値よりも大きい場合)、制御部16において、当該反射物体は自車と反対方向に移動している(すなわち、自車から見て右方向(又は左方向)に「対向車が有る」)と判定する。
【0045】
次のステップS12では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS10で行った処理と同様にして相対速度の絶対値|ΔV|と自車速度の絶対値|Va|を比較し、|ΔV|≪|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合にはステップS13に進み、判定結果がNOの場合にはステップS14に進む。
【0046】
ステップS13では(相対速度の絶対値が自車速度の絶対値よりも小さい場合)、制御部16において、当該反射物体は自車と同じ方向に移動している(すなわち、自車から見て右方向(又は左方向)に「同じ方向に走行する車が有る」)と判定する。この場合の検知例を図12に示す。図示の例では、自車両30の左方向に「同じ方向に走行する他車両36が有る」ことを検知している。
【0047】
次のステップS14では(右方向(又は左方向)に反射物体が有る場合)、制御部16において、ステップS10で行った処理と同様にして相対速度の絶対値|ΔV|と自車速度の絶対値|Va|を比較し、|ΔV|≒|Va|である(YES)か否(NO)かを判定する。判定結果がYESの場合(つまり、当該反射物体が動いていない場合)にはステップS15に進み、判定結果がNOの場合にはステップS9に戻って上記の処理を繰り返す。
【0048】
ステップS15では(相対速度の絶対値と自車速度の絶対値がほぼ等しい場合)、制御部16において、当該反射物体は静止している(すなわち、自車から見て右方向(又は左方向)に「壁が有る」)と判定する。この場合の検知例を図12に示す。図示の例では、自車両30の右方向に「壁37が有る」ことを検知している。この後、ステップS9に戻って上記の処理を繰り返す。
【0049】
以上説明したように、本実施形態に係る車載用ナビゲーション装置10によれば、制御部16により、ナビゲーション機能に基づいて経路案内中に自車が走行している標高を推定(算出)するにあたり、GPS受信機14の出力から検出された自車の現在位置と地図DB11のみを参照するのではなく、スキャン式信号送信機17と反射信号受信機18の協働作用に基づいて検出された反射物体までの距離を指示する信号(反射距離信号RD)の強度の変化も併せて参照するようにしている。
【0050】
これにより、自車が平行道路を走行している場合でも(図6〜図11)、自車の標高をより正確に算出することができるので、自車の走行状態(いずれの道路を走行しているのか、又はどのような状況下で走行しているのか)を高精度で検知することが可能となる。このことは、その検知結果に基づいて行われる経路案内の正確さの向上、ひいてはナビゲーション機能の信頼性の向上に大いに寄与する。
【0051】
また、スキャン式信号送信機17と反射信号受信機18の協働作用に基づいて検出された反射物体に対する自車の相対速度を指示する信号(相対速度信号RV)の強度の変化も併せて参照するようにしているので、自車の左右方向に存在する反射物体(図12の他車両36、壁37など)の判別も行うことができる。
【0052】
上述した実施形態では、反射物体までの距離と反射物体に対する自車の相対速度を検出するためにスキャン式信号送信機17を用いた場合を例にとって説明したが、本発明の要旨からも明らかなように、信号ビームを発信する形態はスキャン式に限定されないことはもちろんである。図6〜図12に例示する応用例からも分かるように、自車の向きに対し横方向を含む面内で少なくとも上方向と斜め上方向と左右方向の計5方向に向けて信号ビームを発信できれば十分であり、スキャン式信号送信機17の代わりに、各方向に向けて信号ビームを個々に発信できるように5箇所に分けて信号発信器を設けてもよい。また、設置個数は5個に限定されず、6個以上設けてもよいことはもちろんである。
【図面の簡単な説明】
【0053】
【図1】本発明の一実施形態に係る車載用ナビゲーション装置の構成を概略的に示すブロック図である。
【図2】図1における制御部の本発明に関連する処理を行うための機能を概略的に示すブロック図である。
【図3】図1の車載用ナビゲーション装置において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理の一例を示すフロー図(その1)である。
【図4】図1の車載用ナビゲーション装置において行う自車の走行状態(車両自体/車両周辺の状態)の検知に係る処理の一例を示すフロー図(その2)である。
【図5】図3の処理フローにおいてステップS2で行う処理を補足説明するための図である。
【図6】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その1)である。
【図7】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その2)である。
【図8】図3の処理フローにおいてステップS4で行う処理を補足説明するための図(その3)である。
【図9】図3の処理フローにおいてステップS7で行う処理を補足説明するための図(その1)である。
【図10】図3の処理フローにおいてステップS7で行う処理を補足説明するための図(その2)である。
【図11】図3の処理フローにおいてステップS8で行う処理を補足説明するための図である。
【図12】図4の処理フローにおいてステップS13、S15で行う処理を補足説明するための図である。
【符号の説明】
【0054】
10…車載用ナビゲーション装置、
11…地図DB(メモリ手段)、
14…GPS受信機(位置検出手段)、
15…自立航法センサ(車速検出手段)、
16…制御部(制御手段)、
16a〜16c…制御部の各処理部、
17…スキャン式信号送信機(信号発信手段)、
18…反射信号受信機(対象物検出手段)、
30…自車、
31,31a,31b,32…道路(対象物/反射物体)、
35…トンネル(対象物/反射物体)、
36…他車両(対象物/反射物体)、
37…壁(対象物/反射物体)、
DR…角度情報(クロック)、
SG,SG1〜SG5…発信信号、
RS,RS1〜RS5…反射信号、
RD…反射距離信号、
RV…相対速度信号。
【特許請求の範囲】
【請求項1】
地図データを格納したメモリ手段と、
自車の現在位置を検出する位置検出手段と、
自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信する信号発信手段と、
発信された信号に対する対象物からの反射信号を受信した場合に該反射信号から当該対象物までの距離を検出する対象物検出手段と、
前記メモリ手段、位置検出手段、信号発信手段及び対象物検出手段に動作可能に接続された制御手段とを具備し、
前記制御手段は、検出された自車の現在位置と前記地図データを参照し、検出された当該対象物までの距離を指示する信号の強度の変化に応じて自車の走行状態を検知することを特徴とする車載用ナビゲーション装置。
【請求項2】
前記信号発信手段は、自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号を走査発信するスキャン式信号送信機であり、前記対象物検出手段は、該スキャン式信号送信機から走査発信された信号に同期して当該対象物からの反射信号を受信することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記制御手段は、自車位置付近に平行道路が存在する場合において前記対象物検出手段が実質的な反射信号を受信しなかったときに、前記平行道路のうち最上の道路を走行中と判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項4】
前記信号発信手段は、自車の向きに対し横方向を含む面内で更に左右方向に向けて信号を発信し、
前記制御手段は、自車位置付近に平行道路が存在する場合において前記対象物検出手段が上方向又は斜め上方向から連続的に反射信号を受信し、かつ、左右方向から反射信号を受信しなかったときに、前記平行道路のうち下側の道路を走行中と判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項5】
前記制御手段は、前記対象物検出手段が上方向又は斜め上方向から連続的に反射信号を受信し、かつ、左右方向からも連続的に反射信号を受信したときに、トンネル内を走行中と判定することを特徴とする請求項4に記載の車載用ナビゲーション装置。
【請求項6】
自車の走行速度を検出する車速検出手段を更に具備し、
前記対象物検出手段は、受信した反射信号から更に当該対象物に対する自車の相対速度を検出し、
前記制御手段は、前記対象物検出手段が右方向又は左方向から反射信号を受信したときに、検出された自車の相対速度の絶対値が検出された自車の走行速度の絶対値よりも大きい場合に、当該対象物は自車と反対方向に移動していると判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項7】
前記制御手段は、前記検出された自車の相対速度の絶対値が前記検出された自車の走行速度の絶対値よりも小さい場合に、当該対象物は自車と同じ方向に移動していると判定することを特徴とする請求項6に記載の車載用ナビゲーション装置。
【請求項8】
前記制御手段は、前記検出された自車の相対速度の絶対値が前記検出された自車の走行速度の絶対値とほぼ等しい場合に、当該対象物は静止していると判定することを特徴とする請求項6に記載の車載用ナビゲーション装置。
【請求項1】
地図データを格納したメモリ手段と、
自車の現在位置を検出する位置検出手段と、
自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信する信号発信手段と、
発信された信号に対する対象物からの反射信号を受信した場合に該反射信号から当該対象物までの距離を検出する対象物検出手段と、
前記メモリ手段、位置検出手段、信号発信手段及び対象物検出手段に動作可能に接続された制御手段とを具備し、
前記制御手段は、検出された自車の現在位置と前記地図データを参照し、検出された当該対象物までの距離を指示する信号の強度の変化に応じて自車の走行状態を検知することを特徴とする車載用ナビゲーション装置。
【請求項2】
前記信号発信手段は、自車の向きに対し横方向を含む面内で左右方向から上方向の全方向に向けて信号を走査発信するスキャン式信号送信機であり、前記対象物検出手段は、該スキャン式信号送信機から走査発信された信号に同期して当該対象物からの反射信号を受信することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記制御手段は、自車位置付近に平行道路が存在する場合において前記対象物検出手段が実質的な反射信号を受信しなかったときに、前記平行道路のうち最上の道路を走行中と判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項4】
前記信号発信手段は、自車の向きに対し横方向を含む面内で更に左右方向に向けて信号を発信し、
前記制御手段は、自車位置付近に平行道路が存在する場合において前記対象物検出手段が上方向又は斜め上方向から連続的に反射信号を受信し、かつ、左右方向から反射信号を受信しなかったときに、前記平行道路のうち下側の道路を走行中と判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項5】
前記制御手段は、前記対象物検出手段が上方向又は斜め上方向から連続的に反射信号を受信し、かつ、左右方向からも連続的に反射信号を受信したときに、トンネル内を走行中と判定することを特徴とする請求項4に記載の車載用ナビゲーション装置。
【請求項6】
自車の走行速度を検出する車速検出手段を更に具備し、
前記対象物検出手段は、受信した反射信号から更に当該対象物に対する自車の相対速度を検出し、
前記制御手段は、前記対象物検出手段が右方向又は左方向から反射信号を受信したときに、検出された自車の相対速度の絶対値が検出された自車の走行速度の絶対値よりも大きい場合に、当該対象物は自車と反対方向に移動していると判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項7】
前記制御手段は、前記検出された自車の相対速度の絶対値が前記検出された自車の走行速度の絶対値よりも小さい場合に、当該対象物は自車と同じ方向に移動していると判定することを特徴とする請求項6に記載の車載用ナビゲーション装置。
【請求項8】
前記制御手段は、前記検出された自車の相対速度の絶対値が前記検出された自車の走行速度の絶対値とほぼ等しい場合に、当該対象物は静止していると判定することを特徴とする請求項6に記載の車載用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−93481(P2007−93481A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−285379(P2005−285379)
【出願日】平成17年9月29日(2005.9.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月29日(2005.9.29)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]