
車載用ナビゲーション装置
【課題】自車両の利用態様に応じた好適な降車地点を提示することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】問い合わせ画面表示手段25によって表示された問い合わせ画面に対して送り用の運転を行う旨の応答操作がなされた場合には、目的地の付近の停車可能地点を探索して案内し、一方、前記問い合わせ画面に対して前記送り用の運転を行わない旨の応答操作がなされた場合には、目的地の付近の駐車可能地点を探索して案内すること。
【解決手段】問い合わせ画面表示手段25によって表示された問い合わせ画面に対して送り用の運転を行う旨の応答操作がなされた場合には、目的地の付近の停車可能地点を探索して案内し、一方、前記問い合わせ画面に対して前記送り用の運転を行わない旨の応答操作がなされた場合には、目的地の付近の駐車可能地点を探索して案内すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に係り、特に、自車両に乗車している複数人の乗員のうちの一部の乗員を目的地まで送るのに好適な車載用ナビゲーション装置に関する。
【背景技術】
【0002】
従来から、車載用ナビゲーション装置においては、目的地までの経路に沿って自車両を目的地まで誘導する際に、目的地の近隣の駐車場を探索してユーザに提示することによって、ユーザが目的地に赴く場合における利便性を向上させることが行われていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−243471号公報
【特許文献2】特開2006−38626号公報
【特許文献3】特開2008−20210号公報
【特許文献4】特開2008−96361号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自車両の利用態様の1つには、自車両に乗車している複数人の乗員のうちの一部の乗員(通常は、運転者以外の乗員すなわち同乗者)を施設等の送り先まで送ることがあるが、このような利用態様で自車両を利用する場合には、自車両を送り先の付近の地点に停車(一時的に停止)させて、送り先に向かうべき該当する乗員を自車両から降車させることが一般的であった。
【0005】
ここで、特許文献1に記載の技術は、乗員全員で目的地に向かうために乗員全員が目的地の付近において自車両から降車するような利用態様に適用する場合には非常に有効である。
【0006】
しかしながら、一部の乗員を送り先に送るような利用態様にまで特許文献1に記載の技術を適用した場合には、自車両が送り先の付近に停車することができれば十分であるにもかからわず駐車場が提示されてしまうことになる。
【0007】
したがって、従来は、必ずしも自車両の利用態様に応じた好適な降車地点を提示することができないといった問題が生じていた。
【0008】
そこで、本発明は、このような問題点に鑑みなされたものであり、自車両の利用態様に応じた好適な降車地点を提示することができ、利便性を向上させることができる車載用ナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
前述した目的を達成するため、本発明に係る車載用ナビゲーション装置は、地図データが記憶された地図データ記憶手段を備えた車載用ナビゲーション装置であって、前記自車両に乗車している複数人の乗員のうちの一部の乗員を前記目的地まで送るための運転である送り用の運転を行うか否かの問い合わせメッセージが記述された問い合わせ画面を、前記問い合わせメッセージに応答するための応答操作が可能な状態で表示部に表示する問い合わせ画面表示手段と、この問い合わせ画面表示手段によって表示された前記問い合わせ画面に対する前記応答操作が可能とされた入力操作手段と、この入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の停車可能地点を探索する停車可能地点探索手段と、前記入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の駐車可能地点を探索する駐車可能地点探索手段と、前記停車可能地点探索手段によって前記停車可能地点が探索された場合に、探索された前記停車可能地点をユーザに案内する停車可能地点案内手段と、前記駐車可能地点探索手段によって前記駐車可能地点が探索された場合に、探索された前記駐車可能地点をユーザに案内する駐車可能地点案内手段とを備えたことを特徴としている。
【0010】
そして、このような構成によれば、問い合わせ画面に対して送り用の運転を行う旨の肯定的な応答操作がなされた場合には、目的地の付近の停車可能地点を探索して案内することができ、一方、問い合わせ画面に対して送り用の運転を行わない旨の否定的な応答操作がなされた場合には、目的地の付近の駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0011】
また、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地が交差点付近の地点であるか否かの判定を行う目的地判定手段を備え、前記停車可能地点探索手段は、前記目的地判定手段によって肯定的な判定結果が得られた場合には、前記目的地の付近の交差点から所定距離以上離れた前記目的地の付近の領域内から前記停車可能地点を探索してもよい。
【0012】
そして、このような構成によれば、送り用の運転の目的地が交差点付近の地点である場合には、停車可能地点の探索領域を目的地の付近の交差点から所定距離以上離れた目的地の付近の領域に限定することによって適法な停車可能地点を効率的に探索して案内することができる。
【0013】
さらに、前記自車両に運転者および同乗者が乗車しているか否かの判定を行う乗車判定手段を備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示してもよい。
【0014】
そして、このような構成によれば、乗車判定手段の判定結果に基づいて、送り用の運転が行われる可能性がある場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱を回避することができるとともに必要時におけるユーザの操作負担を軽減することができる。
【0015】
さらにまた、自車位置を検出する自車位置検出手段と、目的地を設定する目的地設定手段とを備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記自車位置検出手段によって検出された前記自車位置から前記目的地設定手段によって設定された前記目的地までの所要走行距離が所定距離以内の場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索してもよい。
【0016】
そして、このような構成によれば、乗車判定手段の判定結果および自車位置から目的地までの所要走行距離に基づいて、送り用の運転が行われる可能性がさらに高い場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱をさらに確実に回避することができる。
【0017】
また、自車位置を検出する自車位置検出手段と、この自車位置検出手段の検出結果に基づいて、前記自車両が実際に走行した経路を走行履歴として記憶手段に記録する走行履歴記録手段と、前記自車位置検出手段の検出結果および前記走行履歴記録手段によって記録された前記走行履歴に基づいて、前記自車両が過去に走行した経路を前記自車両が現在走行しているとみなすことができるか否かの判定である走行判定を行う走行判定手段とを備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記走行判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記駐車可能地点を探索してもよい。
【0018】
そして、このような構成によれば、目的地が設定されていない場合においても、自車両の現在の走行状態および過去の走行履歴に基づいて送り用の運転が行われる可能性がある場合には問い合わせ画面を自動的に表示することができるので、利便性を向上させることができる。
【0019】
さらに、目的地を設定する目的地設定手段を備え、前記走行判定手段は、前記目的地設定手段によって目的地が設定されないまま前記自車両が走行を開始した場合に前記走行判定を行うようにしてもよい。
【0020】
そして、このような構成によれば、自車両の現在の走行状態および過去の走行履歴に基づく問い合わせ画面の自動的な表示を目的地が設定されないまま自車両が走行を開始した場合に行うことによって、送り用の運転を行う場合には目的地を設定しない場合も珍しくないことに鑑みて、送り用の運転が行われる可能性がさらに高い場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱をより確実に回避することができる。
【0021】
さらにまた、前記問い合わせ画面表示手段は、前記走行判定手段によって肯定的な判定結果が得られた場合に、前記自車両の停車を待って前記問い合わせ画面を表示してもよい。
【0022】
そして、このような構成によれば、問い合わせ画面を自車両の停車を待って表示することができるので、運転の安全性を確保することができる。
【0023】
また、目的地を設定する目的地設定手段を備え、前記問い合わせ画面表示手段は、前記目的地設定手段によって前記目的地が設定された場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索してもよい。
【0024】
そして、このような構成によれば、目的地設定手段によって目的地が設定された場合に問い合わせ画面を表示することによって、構成を簡素化することができる。
【発明の効果】
【0025】
本発明によれば、自車両の利用態様に応じた好適な降車地点を提示することができ、利便性を向上させることができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る車載用ナビゲーション装置の実施形態を示すハードウェア構成図
【図2】本発明に係る車載用ナビゲーション装置の実施形態において、ナビCPUを示す機能ブロック図
【図3】本発明に係る車載用ナビゲーション装置の実施形態において、問い合わせ画面の一例を示す模式図
【図4】本発明に係る車載用ナビゲーション装置の実施形態において、該当停車可能地点の案内例を示す模式図
【図5】本発明に係る車載用ナビゲーション装置の実施形態において、該当駐車可能地点の案内例を示す模式図
【図6】本発明に係る車載用ナビゲーション装置の実施形態を示すフローチャート
【発明を実施するための形態】
【0027】
以下、本発明に係る車載用ナビゲーション装置の実施形態について、図1乃至図6を参照して説明する。
【0028】
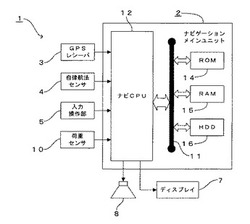
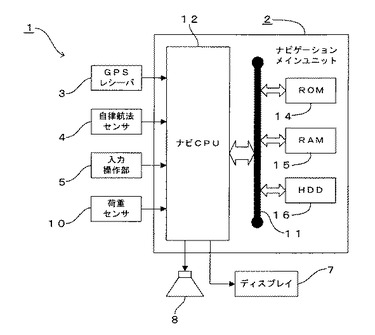
図1に示すように、本実施形態における車載用ナビゲーション装置1は、大別して、ナビゲーションメインユニット2と、このナビゲーションメインユニット2にそれぞれ接続されたGPSレシーバ3、自律航法センサ4、入力操作部5、ディスプレイ7、スピーカ8およびシート荷重センサ10とによって構成されている。
【0029】
GPSレシーバ3は、図示しないGPS衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信したGPS情報をナビゲーションメインユニット2側に出力するようになっている。
【0030】
自律航法センサ4は、自車両の加速度、車速および自車方位等を検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。この自律航法センサ4は、ジャイロセンサや車速センサ(車速パルス)等からなるものであってもよい。
【0031】
入力操作部5は、車載用ナビゲーション装置1に対する種々の入力操作に用いられるようになっている。この入力操作部5は、リモコン、ディスプレイ7のタッチパネル、リニアエンコーダまたはロータリエンコーダ等であってもよい。
【0032】
シート荷重センサ10は、自車両の運転席および運転席以外の座席(助手席や後部座席)にそれぞれ配設されており、各シート荷重センサ10は、対応する座席に乗員が着席したことを検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。このシート荷重センサ10には、圧電センサその他の荷重を検出する公知のセンサを用いることができる。
【0033】
次に、ナビゲーションメインユニット2について詳述すると、図1に示すように、ナビゲーションメインユニット2は、システムバス11にそれぞれ接続されたナビCPU12、ROM14、RAM15およびハードディスクドライブ(HDD)16によって構成されている。
【0034】
ここで、ナビCPU12は、地図表示機能、自車位置算出機能、経路探索機能および経路誘導機能等の車載用ナビゲーション装置1の各種の機能を実行するようになっている。
【0035】
また、ROM14には、ナビCPU12の実行プログラムが記憶されており、ナビCPU12は、この実行プログラムを実行することによって車載用ナビゲーション装置1の機能を実行するようになっている。
【0036】
さらに、RAM15は、ナビCPU12による処理結果等のデータの一時的な保存等に用いられるようになっている。
【0037】
さらにまた、ハードディスクドライブ16は、地図データ記憶手段として機能するようになっており、このハードディスクドライブ16には、地図データが記憶されている。地図データは、例えば、道路データ(形状補間点、セグメント、リンク、ノード、リンク列、道路名称、通行条件および交通看板等を構成要素とするデータ)、背景データ(点、ポリライン、ポリゴンおよびテキスト等を構成要素とするデータ)、道路ネットワークデータ(ノード、リンクおよび通行条件等を構成要素とするデータ)および検索データ(エリア名称、住所、郵便番号およびPOI(Points Of Interest)等を構成要素とするデータ)によって構成されている。このように構成された地図データは、ナビCPU12の各種の機能の実行に適宜用いられるようになっている。
【0038】
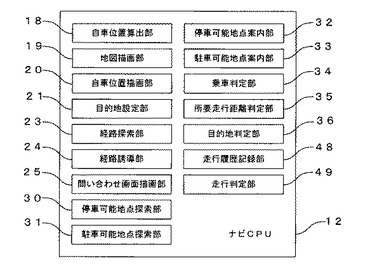
次に、ナビCPU12について詳述すると、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、自車位置検出手段としての自車位置算出部18を有しており、この自車位置算出部18には、GPSレシーバ3から出力されたGPS情報および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部18は、GPSレシーバ3側から入力されたGPS情報に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部18は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの変化分である相対位置として算出(検出)する自律航法を行うようになっている。さらに、自車位置算出部18は、ハードディスクドライブ16に記憶されている地図データを用いることによって、衛星航法または自律航法によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部18は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0039】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての地図描画部19を有しており、この地図描画部19は、自車位置算出部18の算出結果およびハードディスクドライブ16に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置の周辺の所定の領域を示す地図をディスプレイ7に表示するようになっている。
【0040】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての自車位置描画部20を有しており、この自車位置描画部20は、地図描画部19によって表示される地図上に、自車位置算出部18によって算出された自車位置を示す自車位置マークを重畳表示するようになっている。
【0041】
さらにまた、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、目的地設定手段としての目的地設定部21を有している。この目的地設定部21は、目的地設定用の操作画面をディスプレイ7に表示した上で、この表示された目的地設定用の操作画面に対する入力操作部5を用いたユーザの入力操作に応じた目的地を設定するようになっている。
【0042】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての経路探索部23を有している。この経路探索部23は、ハードディスクドライブ16に記憶されている地図データ(主として、道路ネットワークデータ)に基づいて、自車位置算出部18によって算出された自車位置から目的地設定部21によって設定された目的地までの経路を探索するルート計算を行うようになっている。
【0043】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての経路誘導部24を有しており、この経路誘導部24は、経路探索部23によって探索された経路に沿って自車両を目的地へと誘導する経路誘導(ルート案内)を行うようになっている。この経路誘導は、例えば、ディスプレイ7に交差点拡大図を表示することや、地図描画部19によってディスプレイ7に表示された地図上に、経路探索部23によって探索された経路の画像を重畳表示すること、あるいは、スピーカ8を介して交差点右左折案内用の音声を出力すること等によって行われるようになっている。
【0044】
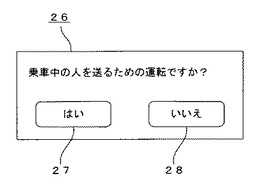
そして、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、問い合わせ画面表示手段としての問い合わせ画面描画部25を有している。この問い合わせ画面描画部25は、自車両に乗車している複数人の乗員のうちの一部の乗員を目的地まで送るための運転である送り用の運転を行うか否かをユーザに問い合わせるための問い合わせメッセージが記述された問い合わせ画面を、問い合わせメッセージに応答するための応答操作が可能な状態でディスプレイ7に表示するようになっている。
【0045】
例えば、問い合わせ画面描画部25は、図3に示すような問い合わせ画面26を表示してもよい。この図3の問い合わせ画面26には、問い合わせメッセージとして「乗車中の人を送るための運転ですか?」という文字が記述されているとともに、この問い合わせメッセージに対する肯定的な応答操作を行うための第1の操作ボタン27と、問い合わせメッセージに対する否定的な応答操作を行うための第2の操作ボタン28とが入力操作手段としての入力操作部5によって操作可能に表示されている。なお、問い合わせメッセージとしては、図3に示したものの他にも、例えば、「同乗者を送ろうとしていますか?」や「送りですか?」等の種々の態様を考えることができる。
【0046】
図2に戻って、ナビCPU12は、その機能ブロックの1つとして、停車可能地点探索手段としての停車可能地点探索部30を有している。この停車可能地点探索部30は、入力操作部5によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地の付近の停車可能な地点(以下、該当停車可能地点と称する)を探索するようになっている。このとき、停車可能地点探索部30は、目的地を中心とした半径が所定距離(例えば、100m)の円形領域を前記該当停車可能地点の探索領域としてこの探索領域内から前記該当停車可能地点を探索するようにしてもよい。なお、前記該当停車可能地点としては、目的地の付近の道路上の地点を挙げることができる。また、前記該当停車可能地点の探索にあたっては、地図データ中の目的地付近の道路の交通規制(車両通行止めや駐停車禁止等)に関する情報も用いられることになる。
【0047】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、駐車可能地点探索手段としての駐車可能地点探索部31を有している。この駐車可能地点探索部31は、入力操作部5によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地の付近の駐車可能な地点(以下、該当駐車可能地点と称する)を探索するようになっている。このとき、駐車可能地点探索部31は、目的地を中心とした半径が所定距離(例えば、100m)の円形領域を前記該当駐車可能地点の探索領域としてこの探索領域内から前記該当駐車可能地点を探索するようにしてもよい。なお、前記該当駐車可能地点としては、目的地の付近のコインパーキング等を挙げることができる。
【0048】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、停車可能地点案内手段としての停車可能地点案内部32を有している。この停車可能地点案内部32は、停車可能地点探索部30によって前記該当停車可能地点が探索された場合に、探索された前記該当停車可能地点をユーザに案内するようになっている。
【0049】
さらにまた、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、駐車可能地点案内手段としての駐車可能地点案内部33を有している。この駐車可能地点案内部33は、駐車可能地点探索部31によって前記該当駐車可能地点が探索された場合に、探索された前記該当駐車可能地点をユーザに案内するようになっている。
【0050】
このような構成によれば、前記問い合わせ画面に対して前記肯定的な応答操作がなされた場合には、前記該当停車可能地点を探索して案内することができ、一方、前記問い合わせ画面に対して前記否定的な応答操作がなされた場合には、前記該当駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0051】
上記構成に加えて、さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、乗員判定手段としての乗車判定部34を有している。この乗車判定部34は、シート荷重センサ10の検出結果に基づいて、自車両に運転者および同乗者がともに乗車しているか否かの判定(以下、乗車判定と称する)を行うようになっている。
【0052】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての所要走行距離判定部35を有している。この所要走行距離判定部35は、ハードディスクドライブ16に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置から目的地設定部21によって設定された目的地までの所要走行距離を算出し、算出された前記所要走行距離が所定距離以内であるか否かの判定(以下、距離判定と称する)を行うようになっている。
【0053】
そして、本実施形態において、問い合わせ画面描画部25は、乗車判定部34の前記乗車判定において肯定的な判定結果が得られ、かつ、所要走行距離判定部35の前記距離判定において肯定的な判定結果が得られた場合に、前記問い合わせ画面を自動的に表示するようになっている。
【0054】
このような構成によれば、前記送り用の運転が行われる可能性が高い場合に限って前記問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱を回避することができるとともに必要時におけるユーザの操作負担を軽減することができる。
【0055】
上記構成に加えて、さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、目的地判定手段としての目的地判定部36を有している。この目的地判定部36は、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地設定部21によって設定された目的地が交差点付近の地点であるか否かの判定(以下、目的地判定と称する)を行うようになっている。ここで、目的地判定部36は、目的地設定部21によって設定された目的地を中心とした半径が所定距離(例えば、50m)の領域以内に交差点が存在する場合に、肯定的な判定結果を出力するようにしてもよい。なお、目的地の付近の交差点は、1箇所に限らず複数箇所存在する場合もある。
【0056】
そして、本実施形態において、停車可能地点探索部30は、目的地判定部36の前記目的地判定において肯定的な判定結果が得られた場合には、目的地の付近の交差点から所定距離(例えば、30m)以上離れた目的地の付近の領域内から前記該当停車可能地点を探索するようになっている。このとき、停車可能地点探索部30は、前述した該当停車可能地点の探索領域から目的地の付近の交差点を中心とした半径が所定距離(例えば、30m)の円形領域を除外した領域内から前記該当停車可能地点を探索するようにしてもよい。
【0057】
このような構成によれば、目的地に向かうべき一部の乗員を適法に降車させることができる前記該当停車可能地点を効率的に探索して案内することができる。
【0058】
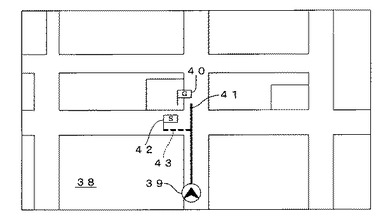
なお、停車可能地点案内部32による前記該当停車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける前記該当停車可能地点に対応する位置に、前記該当停車可能地点を示すマークを重畳表示することや、当該マークの位置において停車すべき旨の音声案内によって行うようにしてもよい。また、このような前記該当停車可能地点の案内は、目的地付近における経路誘導部24の経路誘導に並行して行うようにしてもよい。さらに、このように、前記該当停車可能地点の案内を経路誘導部24の経路誘導に並行して行う場合であって、前記該当停車可能地点が目的地までの経路上から逸脱する場合には、停車可能地点案内部32は、その逸脱点と前記該当停車可能地点とを結ぶ経路を示す画像を地図上に重畳表示するようにしてもよい。
【0059】
ここで、図4は、このような停車可能地点案内部32による前記該当停車可能地点の案内の一例を示したものである。図4においては、地図描画部19によって表示された自車位置の周辺の地図38上に、自車位置描画部20によって自車位置マーク39が重畳表示されているとともに、経路誘導部24によって目的地を示す目的地マーク40および自車位置から目的地までの経路を示す画像41が重畳表示されている。そして、この図4の地図38上には、停車可能地点案内部32により、停車可能地点探索部30によって探索された前記該当停車可能地点を示すマーク42と、自車位置から前記該当停車可能地点までの経路のうちの自車位置から目的地までの経路上から逸脱(図4においては分岐)された経路を示す画像43とが重畳表示されており、これにより、前記該当停車可能地点の案内が経路誘導に並行して行われている。
【0060】
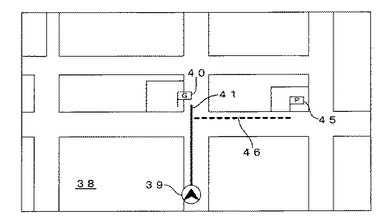
同様に、駐車可能地点案内部33による前記該当駐車可能地点の案内も、地図描画部19によって表示される自車位置の周辺の地図上おける前記該当駐車可能地点に対応する位置に、前記該当駐車可能地点を示すマークを重畳表示することや、当該マークの位置において駐車すべき旨の音声案内によって行うようにしてもよい。また、このような前記該当駐車可能地点の案内は、目的地付近における経路誘導部24の経路誘導に並行して行うようにしてもよい。さらに、このように、前記該当駐車可能地点の案内を経路誘導部24の経路誘導に並行して行う場合であって、前記該当駐車可能地点が目的地までの経路上から逸脱する場合には、駐車可能地点案内部33は、その逸脱点と前記該当駐車可能地点とを結ぶ経路を示す画像を地図上に重畳表示するようにしてもよい。
【0061】
ここで、図5は、このような駐車可能地点案内部33による前記該当駐車可能地点の案内の一例を示したものである。図5においては、図4と同様に、自車位置の周辺の地図38上に、自車位置マーク39、目的地マーク40および自車位置から目的地までの経路を示す画像41が重畳表示されている。そして、この図5の地図38上には、駐車可能地点案内部33により、駐車可能地点探索部31によって探索された前記該当駐車可能地点を示すマーク45と、自車位置から前記該当駐車可能地点までの経路における自車位置から目的地までの経路から逸脱(分岐)された経路を示す画像46とが重畳表示されており、これにより、前記該当駐車可能地点の案内が経路誘導に並行して行われている。
【0062】
図2に戻って、さらに、本実施形態において、ナビCPU12は、その機能ブロックの1つとして、走行履歴記録手段としての走行履歴記録部48を有している。この走行履歴記録部48は、自車両の走行中における自車位置算出部18の算出結果(自車位置の変化)に基づいて自車両の走行軌跡を逐次算出していくことによって、自車両が実際に走行した経路を、走行開始地点から走行終了地点までの走行軌跡の合算値として算出するようになっている。そして、走行履歴記録部48は、このようにして算出された自車両が実際に走行した経路を走行履歴としてハードディスクドライブ16に記録するようになっている。
【0063】
また、ナビCPU12は、その機能ブロックの1つとして、走行判定手段としての走行判定部49を有している。この走行判定部49は、現在の自車位置算出部18の算出結果および走行履歴記録部48によって記録された前記走行履歴に基づいて、自車両が過去に走行した経路を自車両が現在走行しているか否かの判定である走行判定を行うようになっている。この走行判定においては、現在の自車位置の変化から求められる現在の走行軌跡と走行履歴中の走行軌跡とを比較して、現在の走行軌跡が走行履歴中の任意の走行軌跡における走行開始地点側の所定距離分の部位と一致する場合には、肯定的な判定結果を出力するようにしてもよい。
【0064】
なお、本実施形態において、走行判定部49は、目的地設定部21による目的地の設定が行われないまま自車両が走行を開始した場合に、前記走行判定を行うようになっている。
【0065】
そして、本実施形態において、問い合わせ画面描画部25は、乗車判定部34の前記乗車判定において肯定的な判定結果が得られ、かつ、走行判定部49の前記走行判定において肯定的な判定結果が得られた場合にも、前記問い合わせ画面を自動的に表示するようになっている。
【0066】
さらに、このようにして走行判定部49の前記走行判定を経て表示された前記問い合わせ画面に対して、入力操作部5によって前記肯定的な応答操作がなされた場合には、停車可能地点探索部30は、ハードディスクドライブ16に記憶されている地図データに基づいて前記該当停車可能地点(以下、走行履歴に基づく該当停車可能地点と称する)を探索するようになっている。ただし、この走行履歴に基づく該当停車可能地点は、走行判定部49によって自車両が現在走行していると判定された自車両が過去に走行した経路の終点(走行終了地点)を目的地(以下、走行履歴に基づく目的地と称する)とみなして探索される当該走行履歴に基づく目的地の付近の該当停車可能地点である。なお、前述した目的地判定部36は、この走行履歴に基づく目的地を対象とした前記目的地判定も行うようになっている。そして、停車可能地点探索部30は、この走行履歴に基づく目的地を対象とした前記目的地判定において肯定的な判定結果が得られた場合には、前記走行履歴に基づく目的地の付近の交差点から所定距離以上離れた当該目的地の付近の領域内から前記走行履歴に基づく該当停車可能地点を探索するようになっている。
【0067】
一方、前記走行判定部49の前記走行判定を経て表示された前記問い合わせ画面に対して、入力操作部5によって前記否定的な応答操作がなされた場合には、駐車可能地点探索部31は、ハードディスクドライブ16に記憶されている地図データに基づいて前記該当駐車可能地点(以下、走行履歴に基づく該当駐車可能地点と称する)を探索するようになっている。ただし、この走行履歴に基づく該当駐車可能地点は、前記走行履歴に基づく目的地の付近の該当駐車可能地点である。
【0068】
そして、本実施形態において、停車可能地点案内部32は、停車可能地点探索部30によって前記走行履歴に基づく該当停車可能地点が探索された場合に、探索された前記走行履歴に基づく該当停車可能地点をユーザに案内するようになっている。この走行履歴に基づく該当停車可能地点の案内は、自車位置算出部18によって算出された自車位置が停車可能地点探索部30によって探索された前記走行履歴に基づく該当停車可能地点の位置まで所定距離となった時点で開始するようにしてもよい。また、この走行履歴に基づく該当停車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける当該地点に対応する位置に、当該地点を示すマークを重畳表示することや、当該地図上に、自車位置と当該地点とを結ぶ経路を示す画像を重畳表示することによって行うようにしてもよい。
【0069】
さらに、本実施形態において、駐車可能地点案内部33は、駐車可能地点探索部31によって前記走行履歴に基づく該当駐車可能地点が探索された場合に、探索された前記走行履歴に基づく該当駐車可能地点をユーザに案内するようになっている。この走行履歴に基づく該当駐車可能地点の案内は、自車位置算出部18によって算出された自車位置が駐車可能地点探索部31によって探索された前記走行履歴に基づく該当駐車可能地点の位置まで所定距離となった時点で開始するようにしてもよい。また、この走行履歴に基づく該当駐車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける当該地点に対応する位置に、当該地点を示すマークを重畳表示することや、当該地図上に、自車位置と当該地点とを結ぶ経路を示す画像を重畳表示することによって行うようにしてもよい。
【0070】
このような構成によれば、目的地が設定されていない場合においても、自車両の現在の走行状態および過去の走行履歴に基づいて前記送り用の運転が行われる可能性がある場合には問い合わせ画面を自動的に表示することができるので、利便性をさらに向上させることができる。
【0071】
上記構成に加えて、さらに、本実施形態において、問い合わせ画面描画部25は、走行判定部49の前記走行判定を経て前記問い合わせ画面を表示する場合には、当該問い合わせ画面を、走行判定部49によって肯定的な判定結果が得られた場合に、自車両の停車を待って表示するようになっている。この停車のタイミングとしては、走行判定部49によって肯定的な判定結果が得られた後の赤信号における停車時等を挙げることができる。
【0072】
このような構成によれば、走行判定部49の前記走行判定を経て前記問い合わせ画面を表示する場合に、この問い合わせ画面を自車両が停車した際に表示することができるので、運転の安全性を確保することができる。
【0073】
なお、前記該当停車可能地点(前記走行履歴に基づく該当駐車可能地点を含む、以下、本段落において同様)は、目的地の付近の路上の地点であることが多く、このような地点は多数存在することがある。したがって、停車可能地点探索部30によって前記該当停車可能地点が複数件探索される場合には、停車可能地点案内部32は、探索された前記該当停車可能地点のうちの目的地に最も近い地点を案内するようにしてもよい。同様に、駐車可能地点探索部31によって複数件の前記該当駐車可能地点が探索された場合には、駐車可能地点案内部33は、探索された複数件の前記該当駐車可能地点のうちの目的地に最も地点を案内するようにしてもよい。
【0074】
次に、本実施形態の作用の一例について説明する。
【0075】
なお、便宜上、ハードディスクドライブ16には、走行履歴記録部48によって、自車両が過去に実際に走行した経路の情報が走行履歴として蓄積されているものとする。
【0076】
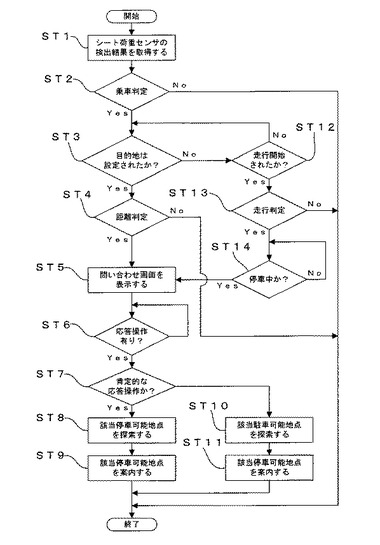
本実施形態においては、まず、図6のステップ1(ST1)において、乗車判定部34により、シート荷重センサ10の検出結果を取得してステップ2(ST2)に進む。
【0077】
次いで、ステップ2(ST2)において、乗車判定部34により、ステップ1(ST1)において取得した検出結果に基づいて前記乗車判定を行う。そして、この乗車判定において肯定的な判定結果が得られた場合にはステップ3(ST3)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0078】
次いで、ステップ3(ST3)において、問い合わせ画面描画部25により、目的地設定部21によって目的地が設定されたか否かを判定し、設定された場合にはステップ4(ST4)に進み、設定されていない場合にはステップ12(ST12)に進む。
【0079】
ここで、ステップ4(ST4)からステップ9(ST9)までの処理について先に説明すると、ステップ4(ST4)においては、問い合わせ画面描画部25によって前記距離判定を行い、この距離判定において肯定的な判定結果が得られた場合にはステップ5(ST5)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0080】
次いで、ステップ5(ST5)において、問い合わせ画面描画部25によってディスプレイ7に前記問い合わせ画面を表示する。
【0081】
次いで、ステップ6(ST6)において、停車可能地点探索部30および駐車可能地点探索部31により、ステップ5(ST5)において表示された前記問い合わせ画面に対する前記応答操作がなされたか否かを判定し、前記応答操作がなされた場合にはステップ7(ST7)に進み、前記応答操作がなされていない場合にはステップ6(ST6)に戻る。
【0082】
次いで、ステップ7(ST7)において、停車可能地点探索部30および駐車可能地点探索部31により、ステップ6(ST6)における前記応答操作が肯定的なものであるか否かを判定し、肯定的なものである場合にはステップ8(ST8)に進み、否定的なものである場合にはステップ10(ST10)に進む。
【0083】
次いで、ステップ8(ST8)において、停車可能地点探索部30によって前記該当停車可能地点を探索する。このとき、目的地判定部36によって前記目的地判定を行い、この目的地判定において肯定的な判定結果が得られた場合には、停車可能地点探索部30は、目的地の付近の交差点から所定距離だけ離れた目的地の付近の領域内から前記該当停車可能地点を探索する。
【0084】
次いで、ステップ9(ST9)において、停車可能地点案内部32により、ステップ8(ST8)において探索された前記該当停車可能地点を案内して処理を終了する。
【0085】
次に、ステップ10(ST10)およびステップ11(ST11)の処理について説明すると、まず、ステップ10においては、駐車可能地点探索部31によって前記該当駐車可能地点を探索してステップ11(ST11)に進む。
【0086】
次いで、ステップ11(ST11)において、駐車可能地点案内部33により、ステップ10(ST10)において探索された前記該当駐車可能地点を案内して処理を終了する。
【0087】
次に、ステップ12(ST12)からステップ14(ST14)までの処理について説明すると、まず、ステップ12(ST12)においては、問い合わせ画面描画部25により、自車両が走行を開始したか否かを判定し、走行を開始した場合にはステップ13(ST13)に進み、走行を開始していない場合にはステップ3(ST3)に戻る。
【0088】
次いで、ステップ13(ST13)において、走行判定部49による前記走行履歴に基づいた前記走行判定を行い、この走行判定において肯定的な判定結果が得られた場合にはステップ14(ST14)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0089】
次いで、ステップ14(ST14)において、問い合わせ画面描画部25により、車速パルス等に基づいて、自車両が停車中であるか否かを判定し、停車中である場合にはステップ5(ST5)に進み、停車中でない場合にはステップ14(ST14)を繰り返す。なお、ステップ14(ST14)からステップ5(ST5)〜ステップ7(ST7)を経てステップ8(ST8)に進む場合には、停車可能地点探索部30によって前記走行履歴に基づく該当停車可能地点が探索されることになる。また、ステップ14(ST14)からステップ5(ST5)〜ステップ7(ST7)を経てステップ10(ST10)に進む場合には、駐車可能地点探索部31によって前記走行履歴に基づく該当駐車可能地点が探索されることになる。
【0090】
以上述べたように、本発明によれば、前記問い合わせ画面に対して前記送り用の運転を行う旨の応答操作がなされた場合には、前記該当停車可能地点を探索して案内することができ、一方、前記問い合わせ画面に対して前記送り用の運転を行わない旨の応答操作がなされた場合には、前記該当駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0091】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じてい種々の変更が可能である。
【0092】
例えば、問い合わせ画面描画部25は、目的地設定部21によって目的地が設定されたことだけを契機として前記問い合わせ画面を表示するようにしてもよい。
【0093】
また、乗車判定部34は、自車両の開閉されたドアの個数や音声認識あるいは車内を撮影するカメラの撮影画像に基づく画像認識等によって前記乗車判定を行ってもよい。
【0094】
さらに、問い合わせ画面には、問い合わせメッセージとともに、あるいは、問い合わせメッセージの一部として、目的地(前記走行履歴に基づく目的地を含む)の名称を表示するようにしてもよい。問い合わせメッセージの一部として目的地を表示する場合には、例えば、「乗車中の人を○○(目的地名)まで送るための運転ですか?」といった内容の問い合わせメッセージを表示してもよい。
【符号の説明】
【0095】
1 車載用ナビゲーション装置
5 入力操作部
7 ディスプレイ
18 自車位置算出部
21 目的地設定部
25 問い合わせ画面描画部
30 停車可能地点探索部
31 駐車可能地点探索部
32 停車可能地点案内部
33 駐車可能地点案内部
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に係り、特に、自車両に乗車している複数人の乗員のうちの一部の乗員を目的地まで送るのに好適な車載用ナビゲーション装置に関する。
【背景技術】
【0002】
従来から、車載用ナビゲーション装置においては、目的地までの経路に沿って自車両を目的地まで誘導する際に、目的地の近隣の駐車場を探索してユーザに提示することによって、ユーザが目的地に赴く場合における利便性を向上させることが行われていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−243471号公報
【特許文献2】特開2006−38626号公報
【特許文献3】特開2008−20210号公報
【特許文献4】特開2008−96361号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自車両の利用態様の1つには、自車両に乗車している複数人の乗員のうちの一部の乗員(通常は、運転者以外の乗員すなわち同乗者)を施設等の送り先まで送ることがあるが、このような利用態様で自車両を利用する場合には、自車両を送り先の付近の地点に停車(一時的に停止)させて、送り先に向かうべき該当する乗員を自車両から降車させることが一般的であった。
【0005】
ここで、特許文献1に記載の技術は、乗員全員で目的地に向かうために乗員全員が目的地の付近において自車両から降車するような利用態様に適用する場合には非常に有効である。
【0006】
しかしながら、一部の乗員を送り先に送るような利用態様にまで特許文献1に記載の技術を適用した場合には、自車両が送り先の付近に停車することができれば十分であるにもかからわず駐車場が提示されてしまうことになる。
【0007】
したがって、従来は、必ずしも自車両の利用態様に応じた好適な降車地点を提示することができないといった問題が生じていた。
【0008】
そこで、本発明は、このような問題点に鑑みなされたものであり、自車両の利用態様に応じた好適な降車地点を提示することができ、利便性を向上させることができる車載用ナビゲーション装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
前述した目的を達成するため、本発明に係る車載用ナビゲーション装置は、地図データが記憶された地図データ記憶手段を備えた車載用ナビゲーション装置であって、前記自車両に乗車している複数人の乗員のうちの一部の乗員を前記目的地まで送るための運転である送り用の運転を行うか否かの問い合わせメッセージが記述された問い合わせ画面を、前記問い合わせメッセージに応答するための応答操作が可能な状態で表示部に表示する問い合わせ画面表示手段と、この問い合わせ画面表示手段によって表示された前記問い合わせ画面に対する前記応答操作が可能とされた入力操作手段と、この入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の停車可能地点を探索する停車可能地点探索手段と、前記入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の駐車可能地点を探索する駐車可能地点探索手段と、前記停車可能地点探索手段によって前記停車可能地点が探索された場合に、探索された前記停車可能地点をユーザに案内する停車可能地点案内手段と、前記駐車可能地点探索手段によって前記駐車可能地点が探索された場合に、探索された前記駐車可能地点をユーザに案内する駐車可能地点案内手段とを備えたことを特徴としている。
【0010】
そして、このような構成によれば、問い合わせ画面に対して送り用の運転を行う旨の肯定的な応答操作がなされた場合には、目的地の付近の停車可能地点を探索して案内することができ、一方、問い合わせ画面に対して送り用の運転を行わない旨の否定的な応答操作がなされた場合には、目的地の付近の駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0011】
また、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地が交差点付近の地点であるか否かの判定を行う目的地判定手段を備え、前記停車可能地点探索手段は、前記目的地判定手段によって肯定的な判定結果が得られた場合には、前記目的地の付近の交差点から所定距離以上離れた前記目的地の付近の領域内から前記停車可能地点を探索してもよい。
【0012】
そして、このような構成によれば、送り用の運転の目的地が交差点付近の地点である場合には、停車可能地点の探索領域を目的地の付近の交差点から所定距離以上離れた目的地の付近の領域に限定することによって適法な停車可能地点を効率的に探索して案内することができる。
【0013】
さらに、前記自車両に運転者および同乗者が乗車しているか否かの判定を行う乗車判定手段を備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示してもよい。
【0014】
そして、このような構成によれば、乗車判定手段の判定結果に基づいて、送り用の運転が行われる可能性がある場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱を回避することができるとともに必要時におけるユーザの操作負担を軽減することができる。
【0015】
さらにまた、自車位置を検出する自車位置検出手段と、目的地を設定する目的地設定手段とを備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記自車位置検出手段によって検出された前記自車位置から前記目的地設定手段によって設定された前記目的地までの所要走行距離が所定距離以内の場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索してもよい。
【0016】
そして、このような構成によれば、乗車判定手段の判定結果および自車位置から目的地までの所要走行距離に基づいて、送り用の運転が行われる可能性がさらに高い場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱をさらに確実に回避することができる。
【0017】
また、自車位置を検出する自車位置検出手段と、この自車位置検出手段の検出結果に基づいて、前記自車両が実際に走行した経路を走行履歴として記憶手段に記録する走行履歴記録手段と、前記自車位置検出手段の検出結果および前記走行履歴記録手段によって記録された前記走行履歴に基づいて、前記自車両が過去に走行した経路を前記自車両が現在走行しているとみなすことができるか否かの判定である走行判定を行う走行判定手段とを備え、前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記走行判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記駐車可能地点を探索してもよい。
【0018】
そして、このような構成によれば、目的地が設定されていない場合においても、自車両の現在の走行状態および過去の走行履歴に基づいて送り用の運転が行われる可能性がある場合には問い合わせ画面を自動的に表示することができるので、利便性を向上させることができる。
【0019】
さらに、目的地を設定する目的地設定手段を備え、前記走行判定手段は、前記目的地設定手段によって目的地が設定されないまま前記自車両が走行を開始した場合に前記走行判定を行うようにしてもよい。
【0020】
そして、このような構成によれば、自車両の現在の走行状態および過去の走行履歴に基づく問い合わせ画面の自動的な表示を目的地が設定されないまま自車両が走行を開始した場合に行うことによって、送り用の運転を行う場合には目的地を設定しない場合も珍しくないことに鑑みて、送り用の運転が行われる可能性がさらに高い場合に限って問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱をより確実に回避することができる。
【0021】
さらにまた、前記問い合わせ画面表示手段は、前記走行判定手段によって肯定的な判定結果が得られた場合に、前記自車両の停車を待って前記問い合わせ画面を表示してもよい。
【0022】
そして、このような構成によれば、問い合わせ画面を自車両の停車を待って表示することができるので、運転の安全性を確保することができる。
【0023】
また、目的地を設定する目的地設定手段を備え、前記問い合わせ画面表示手段は、前記目的地設定手段によって前記目的地が設定された場合に前記問い合わせ画面を表示し、前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索してもよい。
【0024】
そして、このような構成によれば、目的地設定手段によって目的地が設定された場合に問い合わせ画面を表示することによって、構成を簡素化することができる。
【発明の効果】
【0025】
本発明によれば、自車両の利用態様に応じた好適な降車地点を提示することができ、利便性を向上させることができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係る車載用ナビゲーション装置の実施形態を示すハードウェア構成図
【図2】本発明に係る車載用ナビゲーション装置の実施形態において、ナビCPUを示す機能ブロック図
【図3】本発明に係る車載用ナビゲーション装置の実施形態において、問い合わせ画面の一例を示す模式図
【図4】本発明に係る車載用ナビゲーション装置の実施形態において、該当停車可能地点の案内例を示す模式図
【図5】本発明に係る車載用ナビゲーション装置の実施形態において、該当駐車可能地点の案内例を示す模式図
【図6】本発明に係る車載用ナビゲーション装置の実施形態を示すフローチャート
【発明を実施するための形態】
【0027】
以下、本発明に係る車載用ナビゲーション装置の実施形態について、図1乃至図6を参照して説明する。
【0028】
図1に示すように、本実施形態における車載用ナビゲーション装置1は、大別して、ナビゲーションメインユニット2と、このナビゲーションメインユニット2にそれぞれ接続されたGPSレシーバ3、自律航法センサ4、入力操作部5、ディスプレイ7、スピーカ8およびシート荷重センサ10とによって構成されている。
【0029】
GPSレシーバ3は、図示しないGPS衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信したGPS情報をナビゲーションメインユニット2側に出力するようになっている。
【0030】
自律航法センサ4は、自車両の加速度、車速および自車方位等を検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。この自律航法センサ4は、ジャイロセンサや車速センサ(車速パルス)等からなるものであってもよい。
【0031】
入力操作部5は、車載用ナビゲーション装置1に対する種々の入力操作に用いられるようになっている。この入力操作部5は、リモコン、ディスプレイ7のタッチパネル、リニアエンコーダまたはロータリエンコーダ等であってもよい。
【0032】
シート荷重センサ10は、自車両の運転席および運転席以外の座席(助手席や後部座席)にそれぞれ配設されており、各シート荷重センサ10は、対応する座席に乗員が着席したことを検出し、検出結果をナビゲーションメインユニット2側に出力するようになっている。このシート荷重センサ10には、圧電センサその他の荷重を検出する公知のセンサを用いることができる。
【0033】
次に、ナビゲーションメインユニット2について詳述すると、図1に示すように、ナビゲーションメインユニット2は、システムバス11にそれぞれ接続されたナビCPU12、ROM14、RAM15およびハードディスクドライブ(HDD)16によって構成されている。
【0034】
ここで、ナビCPU12は、地図表示機能、自車位置算出機能、経路探索機能および経路誘導機能等の車載用ナビゲーション装置1の各種の機能を実行するようになっている。
【0035】
また、ROM14には、ナビCPU12の実行プログラムが記憶されており、ナビCPU12は、この実行プログラムを実行することによって車載用ナビゲーション装置1の機能を実行するようになっている。
【0036】
さらに、RAM15は、ナビCPU12による処理結果等のデータの一時的な保存等に用いられるようになっている。
【0037】
さらにまた、ハードディスクドライブ16は、地図データ記憶手段として機能するようになっており、このハードディスクドライブ16には、地図データが記憶されている。地図データは、例えば、道路データ(形状補間点、セグメント、リンク、ノード、リンク列、道路名称、通行条件および交通看板等を構成要素とするデータ)、背景データ(点、ポリライン、ポリゴンおよびテキスト等を構成要素とするデータ)、道路ネットワークデータ(ノード、リンクおよび通行条件等を構成要素とするデータ)および検索データ(エリア名称、住所、郵便番号およびPOI(Points Of Interest)等を構成要素とするデータ)によって構成されている。このように構成された地図データは、ナビCPU12の各種の機能の実行に適宜用いられるようになっている。
【0038】
次に、ナビCPU12について詳述すると、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、自車位置検出手段としての自車位置算出部18を有しており、この自車位置算出部18には、GPSレシーバ3から出力されたGPS情報および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部18は、GPSレシーバ3側から入力されたGPS情報に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部18は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの変化分である相対位置として算出(検出)する自律航法を行うようになっている。さらに、自車位置算出部18は、ハードディスクドライブ16に記憶されている地図データを用いることによって、衛星航法または自律航法によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部18は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0039】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての地図描画部19を有しており、この地図描画部19は、自車位置算出部18の算出結果およびハードディスクドライブ16に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置の周辺の所定の領域を示す地図をディスプレイ7に表示するようになっている。
【0040】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての自車位置描画部20を有しており、この自車位置描画部20は、地図描画部19によって表示される地図上に、自車位置算出部18によって算出された自車位置を示す自車位置マークを重畳表示するようになっている。
【0041】
さらにまた、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、目的地設定手段としての目的地設定部21を有している。この目的地設定部21は、目的地設定用の操作画面をディスプレイ7に表示した上で、この表示された目的地設定用の操作画面に対する入力操作部5を用いたユーザの入力操作に応じた目的地を設定するようになっている。
【0042】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての経路探索部23を有している。この経路探索部23は、ハードディスクドライブ16に記憶されている地図データ(主として、道路ネットワークデータ)に基づいて、自車位置算出部18によって算出された自車位置から目的地設定部21によって設定された目的地までの経路を探索するルート計算を行うようになっている。
【0043】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての経路誘導部24を有しており、この経路誘導部24は、経路探索部23によって探索された経路に沿って自車両を目的地へと誘導する経路誘導(ルート案内)を行うようになっている。この経路誘導は、例えば、ディスプレイ7に交差点拡大図を表示することや、地図描画部19によってディスプレイ7に表示された地図上に、経路探索部23によって探索された経路の画像を重畳表示すること、あるいは、スピーカ8を介して交差点右左折案内用の音声を出力すること等によって行われるようになっている。
【0044】
そして、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、問い合わせ画面表示手段としての問い合わせ画面描画部25を有している。この問い合わせ画面描画部25は、自車両に乗車している複数人の乗員のうちの一部の乗員を目的地まで送るための運転である送り用の運転を行うか否かをユーザに問い合わせるための問い合わせメッセージが記述された問い合わせ画面を、問い合わせメッセージに応答するための応答操作が可能な状態でディスプレイ7に表示するようになっている。
【0045】
例えば、問い合わせ画面描画部25は、図3に示すような問い合わせ画面26を表示してもよい。この図3の問い合わせ画面26には、問い合わせメッセージとして「乗車中の人を送るための運転ですか?」という文字が記述されているとともに、この問い合わせメッセージに対する肯定的な応答操作を行うための第1の操作ボタン27と、問い合わせメッセージに対する否定的な応答操作を行うための第2の操作ボタン28とが入力操作手段としての入力操作部5によって操作可能に表示されている。なお、問い合わせメッセージとしては、図3に示したものの他にも、例えば、「同乗者を送ろうとしていますか?」や「送りですか?」等の種々の態様を考えることができる。
【0046】
図2に戻って、ナビCPU12は、その機能ブロックの1つとして、停車可能地点探索手段としての停車可能地点探索部30を有している。この停車可能地点探索部30は、入力操作部5によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地の付近の停車可能な地点(以下、該当停車可能地点と称する)を探索するようになっている。このとき、停車可能地点探索部30は、目的地を中心とした半径が所定距離(例えば、100m)の円形領域を前記該当停車可能地点の探索領域としてこの探索領域内から前記該当停車可能地点を探索するようにしてもよい。なお、前記該当停車可能地点としては、目的地の付近の道路上の地点を挙げることができる。また、前記該当停車可能地点の探索にあたっては、地図データ中の目的地付近の道路の交通規制(車両通行止めや駐停車禁止等)に関する情報も用いられることになる。
【0047】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、駐車可能地点探索手段としての駐車可能地点探索部31を有している。この駐車可能地点探索部31は、入力操作部5によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地の付近の駐車可能な地点(以下、該当駐車可能地点と称する)を探索するようになっている。このとき、駐車可能地点探索部31は、目的地を中心とした半径が所定距離(例えば、100m)の円形領域を前記該当駐車可能地点の探索領域としてこの探索領域内から前記該当駐車可能地点を探索するようにしてもよい。なお、前記該当駐車可能地点としては、目的地の付近のコインパーキング等を挙げることができる。
【0048】
さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、停車可能地点案内手段としての停車可能地点案内部32を有している。この停車可能地点案内部32は、停車可能地点探索部30によって前記該当停車可能地点が探索された場合に、探索された前記該当停車可能地点をユーザに案内するようになっている。
【0049】
さらにまた、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、駐車可能地点案内手段としての駐車可能地点案内部33を有している。この駐車可能地点案内部33は、駐車可能地点探索部31によって前記該当駐車可能地点が探索された場合に、探索された前記該当駐車可能地点をユーザに案内するようになっている。
【0050】
このような構成によれば、前記問い合わせ画面に対して前記肯定的な応答操作がなされた場合には、前記該当停車可能地点を探索して案内することができ、一方、前記問い合わせ画面に対して前記否定的な応答操作がなされた場合には、前記該当駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0051】
上記構成に加えて、さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、乗員判定手段としての乗車判定部34を有している。この乗車判定部34は、シート荷重センサ10の検出結果に基づいて、自車両に運転者および同乗者がともに乗車しているか否かの判定(以下、乗車判定と称する)を行うようになっている。
【0052】
また、図2に示すように、ナビCPU12は、その機能ブロックの1つとしての所要走行距離判定部35を有している。この所要走行距離判定部35は、ハードディスクドライブ16に記憶されている地図データに基づいて、自車位置算出部18によって算出された自車位置から目的地設定部21によって設定された目的地までの所要走行距離を算出し、算出された前記所要走行距離が所定距離以内であるか否かの判定(以下、距離判定と称する)を行うようになっている。
【0053】
そして、本実施形態において、問い合わせ画面描画部25は、乗車判定部34の前記乗車判定において肯定的な判定結果が得られ、かつ、所要走行距離判定部35の前記距離判定において肯定的な判定結果が得られた場合に、前記問い合わせ画面を自動的に表示するようになっている。
【0054】
このような構成によれば、前記送り用の運転が行われる可能性が高い場合に限って前記問い合わせ画面を自動的に表示することができるので、不要な問い合わせ画面の表示によるユーザの混乱を回避することができるとともに必要時におけるユーザの操作負担を軽減することができる。
【0055】
上記構成に加えて、さらに、図2に示すように、ナビCPU12は、その機能ブロックの1つとして、目的地判定手段としての目的地判定部36を有している。この目的地判定部36は、ハードディスクドライブ16に記憶されている地図データに基づいて、目的地設定部21によって設定された目的地が交差点付近の地点であるか否かの判定(以下、目的地判定と称する)を行うようになっている。ここで、目的地判定部36は、目的地設定部21によって設定された目的地を中心とした半径が所定距離(例えば、50m)の領域以内に交差点が存在する場合に、肯定的な判定結果を出力するようにしてもよい。なお、目的地の付近の交差点は、1箇所に限らず複数箇所存在する場合もある。
【0056】
そして、本実施形態において、停車可能地点探索部30は、目的地判定部36の前記目的地判定において肯定的な判定結果が得られた場合には、目的地の付近の交差点から所定距離(例えば、30m)以上離れた目的地の付近の領域内から前記該当停車可能地点を探索するようになっている。このとき、停車可能地点探索部30は、前述した該当停車可能地点の探索領域から目的地の付近の交差点を中心とした半径が所定距離(例えば、30m)の円形領域を除外した領域内から前記該当停車可能地点を探索するようにしてもよい。
【0057】
このような構成によれば、目的地に向かうべき一部の乗員を適法に降車させることができる前記該当停車可能地点を効率的に探索して案内することができる。
【0058】
なお、停車可能地点案内部32による前記該当停車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける前記該当停車可能地点に対応する位置に、前記該当停車可能地点を示すマークを重畳表示することや、当該マークの位置において停車すべき旨の音声案内によって行うようにしてもよい。また、このような前記該当停車可能地点の案内は、目的地付近における経路誘導部24の経路誘導に並行して行うようにしてもよい。さらに、このように、前記該当停車可能地点の案内を経路誘導部24の経路誘導に並行して行う場合であって、前記該当停車可能地点が目的地までの経路上から逸脱する場合には、停車可能地点案内部32は、その逸脱点と前記該当停車可能地点とを結ぶ経路を示す画像を地図上に重畳表示するようにしてもよい。
【0059】
ここで、図4は、このような停車可能地点案内部32による前記該当停車可能地点の案内の一例を示したものである。図4においては、地図描画部19によって表示された自車位置の周辺の地図38上に、自車位置描画部20によって自車位置マーク39が重畳表示されているとともに、経路誘導部24によって目的地を示す目的地マーク40および自車位置から目的地までの経路を示す画像41が重畳表示されている。そして、この図4の地図38上には、停車可能地点案内部32により、停車可能地点探索部30によって探索された前記該当停車可能地点を示すマーク42と、自車位置から前記該当停車可能地点までの経路のうちの自車位置から目的地までの経路上から逸脱(図4においては分岐)された経路を示す画像43とが重畳表示されており、これにより、前記該当停車可能地点の案内が経路誘導に並行して行われている。
【0060】
同様に、駐車可能地点案内部33による前記該当駐車可能地点の案内も、地図描画部19によって表示される自車位置の周辺の地図上おける前記該当駐車可能地点に対応する位置に、前記該当駐車可能地点を示すマークを重畳表示することや、当該マークの位置において駐車すべき旨の音声案内によって行うようにしてもよい。また、このような前記該当駐車可能地点の案内は、目的地付近における経路誘導部24の経路誘導に並行して行うようにしてもよい。さらに、このように、前記該当駐車可能地点の案内を経路誘導部24の経路誘導に並行して行う場合であって、前記該当駐車可能地点が目的地までの経路上から逸脱する場合には、駐車可能地点案内部33は、その逸脱点と前記該当駐車可能地点とを結ぶ経路を示す画像を地図上に重畳表示するようにしてもよい。
【0061】
ここで、図5は、このような駐車可能地点案内部33による前記該当駐車可能地点の案内の一例を示したものである。図5においては、図4と同様に、自車位置の周辺の地図38上に、自車位置マーク39、目的地マーク40および自車位置から目的地までの経路を示す画像41が重畳表示されている。そして、この図5の地図38上には、駐車可能地点案内部33により、駐車可能地点探索部31によって探索された前記該当駐車可能地点を示すマーク45と、自車位置から前記該当駐車可能地点までの経路における自車位置から目的地までの経路から逸脱(分岐)された経路を示す画像46とが重畳表示されており、これにより、前記該当駐車可能地点の案内が経路誘導に並行して行われている。
【0062】
図2に戻って、さらに、本実施形態において、ナビCPU12は、その機能ブロックの1つとして、走行履歴記録手段としての走行履歴記録部48を有している。この走行履歴記録部48は、自車両の走行中における自車位置算出部18の算出結果(自車位置の変化)に基づいて自車両の走行軌跡を逐次算出していくことによって、自車両が実際に走行した経路を、走行開始地点から走行終了地点までの走行軌跡の合算値として算出するようになっている。そして、走行履歴記録部48は、このようにして算出された自車両が実際に走行した経路を走行履歴としてハードディスクドライブ16に記録するようになっている。
【0063】
また、ナビCPU12は、その機能ブロックの1つとして、走行判定手段としての走行判定部49を有している。この走行判定部49は、現在の自車位置算出部18の算出結果および走行履歴記録部48によって記録された前記走行履歴に基づいて、自車両が過去に走行した経路を自車両が現在走行しているか否かの判定である走行判定を行うようになっている。この走行判定においては、現在の自車位置の変化から求められる現在の走行軌跡と走行履歴中の走行軌跡とを比較して、現在の走行軌跡が走行履歴中の任意の走行軌跡における走行開始地点側の所定距離分の部位と一致する場合には、肯定的な判定結果を出力するようにしてもよい。
【0064】
なお、本実施形態において、走行判定部49は、目的地設定部21による目的地の設定が行われないまま自車両が走行を開始した場合に、前記走行判定を行うようになっている。
【0065】
そして、本実施形態において、問い合わせ画面描画部25は、乗車判定部34の前記乗車判定において肯定的な判定結果が得られ、かつ、走行判定部49の前記走行判定において肯定的な判定結果が得られた場合にも、前記問い合わせ画面を自動的に表示するようになっている。
【0066】
さらに、このようにして走行判定部49の前記走行判定を経て表示された前記問い合わせ画面に対して、入力操作部5によって前記肯定的な応答操作がなされた場合には、停車可能地点探索部30は、ハードディスクドライブ16に記憶されている地図データに基づいて前記該当停車可能地点(以下、走行履歴に基づく該当停車可能地点と称する)を探索するようになっている。ただし、この走行履歴に基づく該当停車可能地点は、走行判定部49によって自車両が現在走行していると判定された自車両が過去に走行した経路の終点(走行終了地点)を目的地(以下、走行履歴に基づく目的地と称する)とみなして探索される当該走行履歴に基づく目的地の付近の該当停車可能地点である。なお、前述した目的地判定部36は、この走行履歴に基づく目的地を対象とした前記目的地判定も行うようになっている。そして、停車可能地点探索部30は、この走行履歴に基づく目的地を対象とした前記目的地判定において肯定的な判定結果が得られた場合には、前記走行履歴に基づく目的地の付近の交差点から所定距離以上離れた当該目的地の付近の領域内から前記走行履歴に基づく該当停車可能地点を探索するようになっている。
【0067】
一方、前記走行判定部49の前記走行判定を経て表示された前記問い合わせ画面に対して、入力操作部5によって前記否定的な応答操作がなされた場合には、駐車可能地点探索部31は、ハードディスクドライブ16に記憶されている地図データに基づいて前記該当駐車可能地点(以下、走行履歴に基づく該当駐車可能地点と称する)を探索するようになっている。ただし、この走行履歴に基づく該当駐車可能地点は、前記走行履歴に基づく目的地の付近の該当駐車可能地点である。
【0068】
そして、本実施形態において、停車可能地点案内部32は、停車可能地点探索部30によって前記走行履歴に基づく該当停車可能地点が探索された場合に、探索された前記走行履歴に基づく該当停車可能地点をユーザに案内するようになっている。この走行履歴に基づく該当停車可能地点の案内は、自車位置算出部18によって算出された自車位置が停車可能地点探索部30によって探索された前記走行履歴に基づく該当停車可能地点の位置まで所定距離となった時点で開始するようにしてもよい。また、この走行履歴に基づく該当停車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける当該地点に対応する位置に、当該地点を示すマークを重畳表示することや、当該地図上に、自車位置と当該地点とを結ぶ経路を示す画像を重畳表示することによって行うようにしてもよい。
【0069】
さらに、本実施形態において、駐車可能地点案内部33は、駐車可能地点探索部31によって前記走行履歴に基づく該当駐車可能地点が探索された場合に、探索された前記走行履歴に基づく該当駐車可能地点をユーザに案内するようになっている。この走行履歴に基づく該当駐車可能地点の案内は、自車位置算出部18によって算出された自車位置が駐車可能地点探索部31によって探索された前記走行履歴に基づく該当駐車可能地点の位置まで所定距離となった時点で開始するようにしてもよい。また、この走行履歴に基づく該当駐車可能地点の案内は、地図描画部19によって表示される自車位置の周辺の地図上おける当該地点に対応する位置に、当該地点を示すマークを重畳表示することや、当該地図上に、自車位置と当該地点とを結ぶ経路を示す画像を重畳表示することによって行うようにしてもよい。
【0070】
このような構成によれば、目的地が設定されていない場合においても、自車両の現在の走行状態および過去の走行履歴に基づいて前記送り用の運転が行われる可能性がある場合には問い合わせ画面を自動的に表示することができるので、利便性をさらに向上させることができる。
【0071】
上記構成に加えて、さらに、本実施形態において、問い合わせ画面描画部25は、走行判定部49の前記走行判定を経て前記問い合わせ画面を表示する場合には、当該問い合わせ画面を、走行判定部49によって肯定的な判定結果が得られた場合に、自車両の停車を待って表示するようになっている。この停車のタイミングとしては、走行判定部49によって肯定的な判定結果が得られた後の赤信号における停車時等を挙げることができる。
【0072】
このような構成によれば、走行判定部49の前記走行判定を経て前記問い合わせ画面を表示する場合に、この問い合わせ画面を自車両が停車した際に表示することができるので、運転の安全性を確保することができる。
【0073】
なお、前記該当停車可能地点(前記走行履歴に基づく該当駐車可能地点を含む、以下、本段落において同様)は、目的地の付近の路上の地点であることが多く、このような地点は多数存在することがある。したがって、停車可能地点探索部30によって前記該当停車可能地点が複数件探索される場合には、停車可能地点案内部32は、探索された前記該当停車可能地点のうちの目的地に最も近い地点を案内するようにしてもよい。同様に、駐車可能地点探索部31によって複数件の前記該当駐車可能地点が探索された場合には、駐車可能地点案内部33は、探索された複数件の前記該当駐車可能地点のうちの目的地に最も地点を案内するようにしてもよい。
【0074】
次に、本実施形態の作用の一例について説明する。
【0075】
なお、便宜上、ハードディスクドライブ16には、走行履歴記録部48によって、自車両が過去に実際に走行した経路の情報が走行履歴として蓄積されているものとする。
【0076】
本実施形態においては、まず、図6のステップ1(ST1)において、乗車判定部34により、シート荷重センサ10の検出結果を取得してステップ2(ST2)に進む。
【0077】
次いで、ステップ2(ST2)において、乗車判定部34により、ステップ1(ST1)において取得した検出結果に基づいて前記乗車判定を行う。そして、この乗車判定において肯定的な判定結果が得られた場合にはステップ3(ST3)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0078】
次いで、ステップ3(ST3)において、問い合わせ画面描画部25により、目的地設定部21によって目的地が設定されたか否かを判定し、設定された場合にはステップ4(ST4)に進み、設定されていない場合にはステップ12(ST12)に進む。
【0079】
ここで、ステップ4(ST4)からステップ9(ST9)までの処理について先に説明すると、ステップ4(ST4)においては、問い合わせ画面描画部25によって前記距離判定を行い、この距離判定において肯定的な判定結果が得られた場合にはステップ5(ST5)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0080】
次いで、ステップ5(ST5)において、問い合わせ画面描画部25によってディスプレイ7に前記問い合わせ画面を表示する。
【0081】
次いで、ステップ6(ST6)において、停車可能地点探索部30および駐車可能地点探索部31により、ステップ5(ST5)において表示された前記問い合わせ画面に対する前記応答操作がなされたか否かを判定し、前記応答操作がなされた場合にはステップ7(ST7)に進み、前記応答操作がなされていない場合にはステップ6(ST6)に戻る。
【0082】
次いで、ステップ7(ST7)において、停車可能地点探索部30および駐車可能地点探索部31により、ステップ6(ST6)における前記応答操作が肯定的なものであるか否かを判定し、肯定的なものである場合にはステップ8(ST8)に進み、否定的なものである場合にはステップ10(ST10)に進む。
【0083】
次いで、ステップ8(ST8)において、停車可能地点探索部30によって前記該当停車可能地点を探索する。このとき、目的地判定部36によって前記目的地判定を行い、この目的地判定において肯定的な判定結果が得られた場合には、停車可能地点探索部30は、目的地の付近の交差点から所定距離だけ離れた目的地の付近の領域内から前記該当停車可能地点を探索する。
【0084】
次いで、ステップ9(ST9)において、停車可能地点案内部32により、ステップ8(ST8)において探索された前記該当停車可能地点を案内して処理を終了する。
【0085】
次に、ステップ10(ST10)およびステップ11(ST11)の処理について説明すると、まず、ステップ10においては、駐車可能地点探索部31によって前記該当駐車可能地点を探索してステップ11(ST11)に進む。
【0086】
次いで、ステップ11(ST11)において、駐車可能地点案内部33により、ステップ10(ST10)において探索された前記該当駐車可能地点を案内して処理を終了する。
【0087】
次に、ステップ12(ST12)からステップ14(ST14)までの処理について説明すると、まず、ステップ12(ST12)においては、問い合わせ画面描画部25により、自車両が走行を開始したか否かを判定し、走行を開始した場合にはステップ13(ST13)に進み、走行を開始していない場合にはステップ3(ST3)に戻る。
【0088】
次いで、ステップ13(ST13)において、走行判定部49による前記走行履歴に基づいた前記走行判定を行い、この走行判定において肯定的な判定結果が得られた場合にはステップ14(ST14)に進み、否定的な判定結果が得られた場合には処理を終了する。
【0089】
次いで、ステップ14(ST14)において、問い合わせ画面描画部25により、車速パルス等に基づいて、自車両が停車中であるか否かを判定し、停車中である場合にはステップ5(ST5)に進み、停車中でない場合にはステップ14(ST14)を繰り返す。なお、ステップ14(ST14)からステップ5(ST5)〜ステップ7(ST7)を経てステップ8(ST8)に進む場合には、停車可能地点探索部30によって前記走行履歴に基づく該当停車可能地点が探索されることになる。また、ステップ14(ST14)からステップ5(ST5)〜ステップ7(ST7)を経てステップ10(ST10)に進む場合には、駐車可能地点探索部31によって前記走行履歴に基づく該当駐車可能地点が探索されることになる。
【0090】
以上述べたように、本発明によれば、前記問い合わせ画面に対して前記送り用の運転を行う旨の応答操作がなされた場合には、前記該当停車可能地点を探索して案内することができ、一方、前記問い合わせ画面に対して前記送り用の運転を行わない旨の応答操作がなされた場合には、前記該当駐車可能地点を探索して案内することができるので、自車両の利用態様に応じた好適な降車地点を提示することができる。
【0091】
なお、本発明は、前述した実施の形態に限定されるものではなく、必要に応じてい種々の変更が可能である。
【0092】
例えば、問い合わせ画面描画部25は、目的地設定部21によって目的地が設定されたことだけを契機として前記問い合わせ画面を表示するようにしてもよい。
【0093】
また、乗車判定部34は、自車両の開閉されたドアの個数や音声認識あるいは車内を撮影するカメラの撮影画像に基づく画像認識等によって前記乗車判定を行ってもよい。
【0094】
さらに、問い合わせ画面には、問い合わせメッセージとともに、あるいは、問い合わせメッセージの一部として、目的地(前記走行履歴に基づく目的地を含む)の名称を表示するようにしてもよい。問い合わせメッセージの一部として目的地を表示する場合には、例えば、「乗車中の人を○○(目的地名)まで送るための運転ですか?」といった内容の問い合わせメッセージを表示してもよい。
【符号の説明】
【0095】
1 車載用ナビゲーション装置
5 入力操作部
7 ディスプレイ
18 自車位置算出部
21 目的地設定部
25 問い合わせ画面描画部
30 停車可能地点探索部
31 駐車可能地点探索部
32 停車可能地点案内部
33 駐車可能地点案内部
【特許請求の範囲】
【請求項1】
地図データが記憶された地図データ記憶手段を備えた車載用ナビゲーション装置であって、
前記自車両に乗車している複数人の乗員のうちの一部の乗員を前記目的地まで送るための運転である送り用の運転を行うか否かの問い合わせメッセージが記述された問い合わせ画面を、前記問い合わせメッセージに応答するための応答操作が可能な状態で表示部に表示する問い合わせ画面表示手段と、
この問い合わせ画面表示手段によって表示された前記問い合わせ画面に対する前記応答操作が可能とされた入力操作手段と、
この入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の停車可能地点を探索する停車可能地点探索手段と、
前記入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の駐車可能地点を探索する駐車可能地点探索手段と、
前記停車可能地点探索手段によって前記停車可能地点が探索された場合に、探索された前記停車可能地点をユーザに案内する停車可能地点案内手段と、
前記駐車可能地点探索手段によって前記駐車可能地点が探索された場合に、探索された前記駐車可能地点をユーザに案内する駐車可能地点案内手段と
を備えたことを特徴とする車載用ナビゲーション装置。
【請求項2】
前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地が交差点付近の地点であるか否かの判定を行う目的地判定手段を備え、
前記停車可能地点探索手段は、前記目的地判定手段によって肯定的な判定結果が得られた場合には、前記目的地の付近の交差点から所定距離以上離れた前記目的地の付近の領域内から前記停車可能地点を探索すること
を特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記自車両に運転者および同乗者が乗車しているか否かの判定を行う乗車判定手段を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示すること
を特徴とする請求項1または請求項2に記載の車載用ナビゲーション装置。
【請求項4】
自車位置を検出する自車位置検出手段と、
目的地を設定する目的地設定手段と
を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記自車位置検出手段によって検出された前記自車位置から前記目的地設定手段によって設定された前記目的地までの所要走行距離が所定距離以内の場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項3に記載の車載用ナビゲーション装置。
【請求項5】
自車位置を検出する自車位置検出手段と、
この自車位置検出手段の検出結果に基づいて、前記自車両が実際に走行した経路を走行履歴として記憶手段に記録する走行履歴記録手段と、
前記自車位置検出手段の検出結果および前記走行履歴記録手段によって記録された前記走行履歴に基づいて、前記自車両が過去に走行した経路を前記自車両が現在走行しているとみなすことができるか否かの判定である走行判定を行う走行判定手段と
を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記走行判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項3に記載の車載用ナビゲーション装置。
【請求項6】
目的地を設定する目的地設定手段を備え、
前記走行判定手段は、前記目的地設定手段によって目的地が設定されないまま前記自車両が走行を開始した場合に前記走行判定を行うこと
を特徴とする請求項5に記載の車載用ナビゲーション装置。
【請求項7】
前記問い合わせ画面表示手段は、前記走行判定手段によって肯定的な判定結果が得られた場合に、前記自車両の停車を待って前記問い合わせ画面を表示すること
を特徴とする請求項5または請求項6に記載の車載用ナビゲーション装置。
【請求項8】
目的地を設定する目的地設定手段を備え、
前記問い合わせ画面表示手段は、前記目的地設定手段によって前記目的地が設定された場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項1または請求項2に記載の車載用ナビゲーション装置。
【請求項1】
地図データが記憶された地図データ記憶手段を備えた車載用ナビゲーション装置であって、
前記自車両に乗車している複数人の乗員のうちの一部の乗員を前記目的地まで送るための運転である送り用の運転を行うか否かの問い合わせメッセージが記述された問い合わせ画面を、前記問い合わせメッセージに応答するための応答操作が可能な状態で表示部に表示する問い合わせ画面表示手段と、
この問い合わせ画面表示手段によって表示された前記問い合わせ画面に対する前記応答操作が可能とされた入力操作手段と、
この入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行う旨の肯定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の停車可能地点を探索する停車可能地点探索手段と、
前記入力操作手段によって前記問い合わせ画面に対して前記送り用の運転を行わない旨の否定的な応答操作がなされた場合に、前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地の付近の駐車可能地点を探索する駐車可能地点探索手段と、
前記停車可能地点探索手段によって前記停車可能地点が探索された場合に、探索された前記停車可能地点をユーザに案内する停車可能地点案内手段と、
前記駐車可能地点探索手段によって前記駐車可能地点が探索された場合に、探索された前記駐車可能地点をユーザに案内する駐車可能地点案内手段と
を備えたことを特徴とする車載用ナビゲーション装置。
【請求項2】
前記地図データ記憶手段に記憶された前記地図データに基づいて、前記目的地が交差点付近の地点であるか否かの判定を行う目的地判定手段を備え、
前記停車可能地点探索手段は、前記目的地判定手段によって肯定的な判定結果が得られた場合には、前記目的地の付近の交差点から所定距離以上離れた前記目的地の付近の領域内から前記停車可能地点を探索すること
を特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記自車両に運転者および同乗者が乗車しているか否かの判定を行う乗車判定手段を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示すること
を特徴とする請求項1または請求項2に記載の車載用ナビゲーション装置。
【請求項4】
自車位置を検出する自車位置検出手段と、
目的地を設定する目的地設定手段と
を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記自車位置検出手段によって検出された前記自車位置から前記目的地設定手段によって設定された前記目的地までの所要走行距離が所定距離以内の場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項3に記載の車載用ナビゲーション装置。
【請求項5】
自車位置を検出する自車位置検出手段と、
この自車位置検出手段の検出結果に基づいて、前記自車両が実際に走行した経路を走行履歴として記憶手段に記録する走行履歴記録手段と、
前記自車位置検出手段の検出結果および前記走行履歴記録手段によって記録された前記走行履歴に基づいて、前記自車両が過去に走行した経路を前記自車両が現在走行しているとみなすことができるか否かの判定である走行判定を行う走行判定手段と
を備え、
前記問い合わせ画面表示手段は、前記乗車判定手段によって肯定的な判定結果が得られ、かつ、前記走行判定手段によって肯定的な判定結果が得られた場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記自車両が現在走行しているとみなされる前記自車両が過去に走行した経路の終点を目的地とみなして当該目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項3に記載の車載用ナビゲーション装置。
【請求項6】
目的地を設定する目的地設定手段を備え、
前記走行判定手段は、前記目的地設定手段によって目的地が設定されないまま前記自車両が走行を開始した場合に前記走行判定を行うこと
を特徴とする請求項5に記載の車載用ナビゲーション装置。
【請求項7】
前記問い合わせ画面表示手段は、前記走行判定手段によって肯定的な判定結果が得られた場合に、前記自車両の停車を待って前記問い合わせ画面を表示すること
を特徴とする請求項5または請求項6に記載の車載用ナビゲーション装置。
【請求項8】
目的地を設定する目的地設定手段を備え、
前記問い合わせ画面表示手段は、前記目的地設定手段によって前記目的地が設定された場合に前記問い合わせ画面を表示し、
前記停車可能地点探索手段は、当該問い合わせ画面に対する前記肯定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記停車可能地点を探索し、
前記駐車可能地点探索手段は、当該問い合わせ画面に対する前記否定的な応答操作がなされた場合に、前記目的地設定手段によって設定された前記目的地の付近の前記駐車可能地点を探索すること
を特徴とする請求項1または請求項2に記載の車載用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−281628(P2010−281628A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−133926(P2009−133926)
【出願日】平成21年6月3日(2009.6.3)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月3日(2009.6.3)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]