
車載用ナビゲーション装置
【課題】運転中における残量不足による帰還の警告をやめるとともに、また確実な燃料補充の機会を与えることが可能な車載用ナビゲーション装置を提供することを目的とする。
【解決手段】
目的地設定手段と、車両を走行させるための燃料の残量を検出する残量検出手段と、充電可能な出発地と目的地との間の往復走行が燃料の残量により可能か否かを判定する判定手段と、を備えることで、車両の運転を行う前に往復走行が可能な否かわかるので、不可能であれば出発地で確実に燃料補充を行うことが可能となる。
【解決手段】
目的地設定手段と、車両を走行させるための燃料の残量を検出する残量検出手段と、充電可能な出発地と目的地との間の往復走行が燃料の残量により可能か否かを判定する判定手段と、を備えることで、車両の運転を行う前に往復走行が可能な否かわかるので、不可能であれば出発地で確実に燃料補充を行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関するものであり、特に、電気自動車などにおいて燃料の残量により充電可能な出発地から目的地までの往復走行が可能か否かを判定する車載用ナビゲーション装置に関するものである。
【背景技術】
【0002】
現在も主流であるガソリン自動車に変るものとして、電気モータを動力源とする電気自動車が登場してきている。この電気自動車は電気モータを動作させるのに電気が必要となるため、当然であるがバッテリの残量がなくなってしまうと走行できなくなってしまう。
そこで、特許文献1(特開2004−266898号公報)には、車両の現在位置と車両の帰還地(自宅)とを把握しながら、現在のバッテリの残量で帰還地まで到達するのが難しくなる前に、ドライバへ警告を行うものが記載されている。
なお、バッテリの残量を精度よく検出して表示する技術として、特許文献2(特開閉4−368401号公報)に開示されたバッテリの残存容量表示装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−266898号公報
【特許文献2】特開平4−368401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているものは、車両の現在地と帰還地とを常に把握しながらバッテリの残量に応じて警告を行うものである。つまり実際に車両が走行している際に帰還が難しくなると警告を行うものである。
しかし、目的地を決めないでドライブするような場合であれば特許文献1のようなものでもよいが、通常ドライバは目的地を決めてから運転することが多い。このような場合に目的地付近まで来ていながら、バッテリの残量不足のために警告が行われてもドライバとしては目的地まで行くべきか、帰還するべきか判断に迷ってしまい、かえって運転中に動揺してしまう虞がある。また出発後、しばらく経って帰還の警告が行われたのでは、それまでの走行が無駄になってしまう。
さらに、特許文献1には帰還地として充電可能なスタンドを設定しておき、バッテリの不残量が不足するとこのスタンドの場所へ案内することも記載されている。
しかし、電気自動車が登場してきているとはいえ、まだまだ普及しているわけではないので、充電可能なスタンドの数もガソリンスタンドの数に比べまだまだ限られている。とくに大都市以外の地域になればなるほど充電可能なスタンドの数は限られてくる。また充電可能なスタンドであっても、定休日や臨時休業ということもあり得るし、スタンドでは充電できる装置の数が限られているので使用中ということもあり得るので、必ずしも確実に充電が行えるわけではない。したがって、電気自動車においては特許文献1のような帰還地(出発地)と現在地と帰還地(スタンド)の3つの拠点を把握して、バッテリの残量にもとづく帰還の警告を行うことは現実的ではない。
そこで、本発明は車両による走行を行う前に、充電可能な出発地と目的地との間を往復して走行できるかどうかの判断を行うことで、運転中の警告を行うことを防ぎ、また往復できないのであれば出発地で燃料の補充を行わせることで確実な燃料補充の機会を与えることが可能な車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記課題を解決するために、本願の請求項1にかかる発明は、車両を走行させるための燃料の残量を検出する残量検出手段と、目的地を設定する目的地設定手段と、車両を走行させるための燃料の残量を検出する残量検出手段と、充電可能な出発地から前記目的地との間の往復走行が燃料の残量により可能か否かを判定する判定手段と、を備えることを特徴とする車載用ナビゲーション装置である。
また、本願の請求項2にかかる発明は、請求項1に記載の車載用ナビゲーション装置において、前記目的地の代替施設を記憶する代替施設記憶手段と、設定された前記目的地との間で往復走行が不可能な場合に、前記代替施設記憶手段から代替施設を検索する代替施設検索手段と、を備え、前記判定手段は、前記出発地と前記代替施設検索手段により検索された代替施設との間の往復走行が検出された前記燃料の残量により可能か否かについても判定することを特徴とする。
また、本願の請求項3にかかる発明は、請求項2に記載の車載用ナビゲーション装置において、前記出発地と前記代替施設との間の経路を探索する経路探索手段を備え、前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項4にかかる発明は、請求項2に記載の車載用ナビゲーション装置において、前記判定手段は、前記出発地と前記代替施設との間の直線経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項5にかかる発明は、請求項1から4のいずれか一項に記載の車載用ナビゲーション装置において、前記出発地と前記目的地との間の経路を探索する経路探索手段を備え、前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項6にかかる発明は、請求項1から4のいずれか一項に記載の車載用ナビゲーション装置において、前記判定手段は、前記出発地と前記目的地との間の直線経路にもとづいて判定を行うことを特徴とする
また、本願の請求項7にかかる発明は、請求項2から4のいずれか一項に記載の車載用ナビゲーション装置において、前記代替施設検索手段によって代替施設が見つからなかった場合に、燃料が満杯であるか否かの判定を行うことを特徴とする。
また、本願の請求項8にかかる発明は、請求項1から7のいずれか一項に記載の車載用ナビゲーション装置において、前記車載用ナビゲーション装置は、車両の現在地を検出する現在地特定手段と、充電可能な位置情報と、を備えており、前記現在地特定手段により検出された車両の現在地が、前記充電可能な位置情報と一致するか否かにより、前記充電可能な出発地が特定されることを特徴とする。
また、本願の請求項1から8のいずれか一項に記載の車載用ナビゲーション装置において、前記車両を走行させるための燃料は、電気自動車を走行させるためのバッテリに充電された電力であることを特徴とする。
【発明の効果】
【0006】
請求項1にかかる発明においては、車両を走行させるための燃料の残量を検出する残量検出手段と、目的地を設定する目的地設定手段と、充電可能な出発地から前記目的地との間の往復走行が検出された前記燃料の残量により可能か否かを判定する判定手段と、を備える車載用ナビゲーション装置として構成されている。
このような構成にすることにより、現在の燃料の残量によって出発地と目的地との間の往復を行えるかどうかが車両を走行する前にわかるので、車両の走行途中で帰還警告を受けることがないので、ドライバは安心して運転を行うことができる。また、出発地と目的地との間で往復できないことを、出発地で知ることができるので、出発地で燃料の補充が行える車両であれば確実にその場で燃料の補充を行うことができる。
請求項2にかかる発明においては、請求項1にかかる発明において、出発地と目的地との間で往復できない場合には、往復可能な代替施設がないか判定してくれるので、利便性を向上することができる。
請求項3にかかる発明においては、請求項2にかかる発明において、代替施設との間の経路を検索した上で、出発地と代替施設との間で往復が可能か否かを判定するので、より正確な判断を行うことが可能となる。
請求項4にかかる発明においては、請求項2にかかる発明において、出発地と代替施設との間の直線経路にもとづいて往復が可能か否かを判定するので、複雑な経路探索が必要ないので判定の処理を早くすることが可能となる。
請求項5にかかる発明においては、請求項1から4のいずれかにかかる発明において、目的地との間の経路を検索した上で、出発地と目的地との間で往復が可能か否かを判定するので、より正確な判断を行うことが可能となる。
請求項6にかかる発明においては、請求項1から4のいずれかにかかる発明において、出発地と目的地との間の直線経路にもとづいて往復が可能か否かを判定するので、複雑な経路探索が必要ないことで判定の処理を早くすることが可能となる。
請求項7にかかる発明においては、請求項2から4のいずれかにかかる発明において、燃料が満杯であるか否かの判定を行うので、燃料が満杯であれば長距離の走行が考えられるので、燃料切れが発生することを事前に伝えることができる。
請求項8にかかる発明においては、請求項1から7のいずれかにかかる発明において、車両の現在地が、充電可能な位置であるか否か特定されるので、ユーザにおいて充電可能な出発地をとくに意識する必要がない。
請求項9にかかる発明においては、請求項1から8のいずれかにかかる発明において、
燃料が電気自動車のバッテリの電力なので、充電スタンドの数がまだまだ限られている反面、通常充電設備が出発地には備えられているので、バッテリの電力を燃料に走行する電気自動車により適している。
【図面の簡単な説明】
【0007】
【図1】本発明の実施形態にかかる車載用ナビゲーション装置の要部構成を示すブロック図である。
【図2】本発明の実施形態における代替施設情報の一例について示す図である。
【図3】本発明の実施形態にかかる車載用ナビゲーション装置の動作フローチャートである。
【図4】本発明の実施形態にかかる車載用ナビゲーション装置の動作の概念を示す概念図である。
【図5】本発明の実施形態にかかる車載用ナビゲーション装置の動作の概念を示す別の概念図である。
【図6】本発明の他の実施形態における車載用ナビゲーション装置の動作の概念を示す概念図である。
【発明を実施するための形態】
【0008】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施例は、本発明の技術的思想を具体化するための車載用ナビゲーション装置を例示するものであって、本発明をこの車載用ナビゲーション装置に特定することを意図するものではなく、本発明の技術的範囲は、特許請求の範囲の記載によって定められるものである。
【実施例】
【0009】
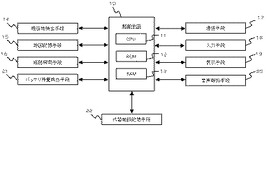
図1は、本実施例である電気自動車に搭載される車載用ナビゲーション装置の要部構成を示すブロック図である。なおこの車載用ナビゲーション装置は、電気自動車の社内に固定して取り付けられたものでもよく、また電気自動車に対して取り外し可能に取り付けられるものでも構わない。
制御手段10は、CPU11、ROM12、RAM13からなるプロセッサで構成されている。そしてROM12、RAM13に記録された制御プログラム等に従って、車載用ナビゲーション装置の各部の動作が制御される。この制御プログラムには、車載用ナビゲーション装置の主な機能である経路案内を行うプログラムや、よく走行する経路を学習して経路探索に反映させる機能などのプログラムが格納されている。そして後述する本発明における、往復走行判定のプログラムも格納されることになる。なお、後述するように、制御手段10は、電気自動車が出発地から目的地まで行って帰ってくることができるか否かを判定する判定手段として機能するとともに、目的地までの往復が不可能な場合に目的地の代わりとなる代替施設がないか否かを検索する代替施設検索手段としても機能する。
現在地検出手段14は、地球の上空を周回している複数のGPS衛星から時刻情報を含む電波を受信するGPS受信機等で構成され、受信した電波に基づき現在地を検出する。また、現在地検出手段14としては、距離センサ、方位センサ、舵角センサ等からなる自立航法装置を用いることもできる。
なお、自宅に電気自動車を停車させ、つぎに電気自動車を運転する際には、その場所が出発地点となる。そしてこの車載用ナビゲーション装置が起動されると、電気自動車を停車させていた自宅の位置が現在地検出手段14によって検出されることになる。したがって現在地検出手段14は、出発地を特定することになるので後述する出発地特定手段も兼ねている。
地図記憶手段15は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータとを含む道路情報を記憶している。道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が記憶されている。
また、道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、リンク長(リンクコスト)、所要時間、制限速度、車線数、車道幅等の道路属性が含まれる。道路リンクデータには、さらに道路属性として橋、トンネル、踏切、料金所等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
さらに、地図記憶手段15には、海岸線、湖沼、河川形状等の水系データ、行政境界データ、ガソリンスタンドや飲食店の位置、施設形状、施設名称を含む施設情報が記憶されている。
経路探索手段16は、地図記憶手段15に記憶されている道路情報を参照し、現在地から目的地に至る電気自動車の最適経路を探索する。最適経路の探索は、例えば、現在地から目的地に対応する道路ノードまでに至るリンクとノードをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長又は総所要時間が最短となる経路を最適経路とし、当該経路に属する道路ノードやリンクを最適経路データとして提供するものである。
通信手段17は、例えば、インフラとして所定の地点に配備されているVICS(登録商標)等の情報提供システムを介して通信を行い、渋滞情報を含む交通情報を定期的に取得するものである。
入力手段18は、車載用ナビゲーション装置における操作入力や目的地の入力を行う各種キー、スイッチ等から構成される。
表示手段19は、地図画像や経路の画像、自車両の位置、案内する目的地や各種施設の位置等を表示するものであり、液晶ディスプレイ等の表示装置で構成される。なお、この表示手段19である表示装置にタッチセンサからなる入力装置を一体化し、入力手段18として機能させることもできる。この場合、ディスプレイ上に表示されたアイコンをユーザが触れることで入力が行われる。
音声報知手段20は、探索された経路に関する情報や外部から取得した交通情報等を音声で案内するものである。
バッテリ残量検出手段21は、電気自動車の走行に必要な電力を供給するバッテリの残量を検出するものである。なお、バッテリの残量は、駆動源に供給される電流値を検出して算出することができ、例えば、特許文献2(特開平4−368401)に開示された周知の方法が利用可能である。なお、本実施例におけるバッテリ残量とは、本発明における燃料の残量の一例である。
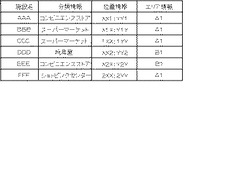
代替施設記憶手段22は、施設毎の情報を記憶しておくものである。具体的には、施設情報、分類情報、位置情報、エリア情報が記憶されている。
施設情報は、建物の実際の名称等で構成されている。分類情報は、施設の種類、例えばコンビニエンスストアであったり、玩具屋であったり、公園であったりと、その施設の属する総称を付与することで構成されている。位置情報は、その施設のある緯度と経度の情報など、その施設が設けられている場所が特定できる情報で構成されている。エリア情報は、その施設が設けられているエリアに関する情報である。このエリアは例えば県単位であったり、市単位であったりと、施設がどのエリアに属しているかを知るための情報である。なおこの代替施設記憶手段22を書き換え可能にしておくことで、最新の情報を入手できるようにしておくとよい。
これらの一例を示したものを図2に示す。例えば図2における施設AAAは、分類がコンビニエンスストアであり、緯度と経度からなる位置情報(XX1:YY1)を有し、またエリア情報からA1エリアに属していることがわかる。そしてA1エリアには、同分類のコンビニエンスストアが存在していないので、施設AAAに代替する目的地がこのエリアに存在していないことがわかる。施設BBBの場合は、A1エリアに同分類のスーパーマーケットである施設CCCが存在しているので、施設BBBに代替する目的地が存在していることがわかる。なお、この代替施設記憶手段22は、地図記憶手段15の中に設けられていても構わない。
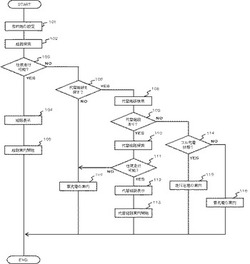
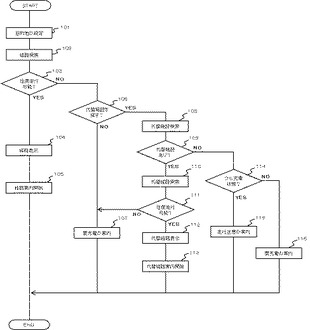
次に、図3のフローチャートを用いて、本実施例における車載用ナビゲーション装置の動作を説明する。まずユーザが電気自動車に乗車し、このナビゲーション装置を起動させ、入力手段18を介して本実施例である往復走行判定のモードを選択することにより、図3のフローチャートの処理が開始される。なおこの往復走行判定とは、電気自動車のバッテリの残量で、出発地を出て設定した目的地まで行った後、目的地からまた出発地まで戻ってくることができるか否かを判定する処理のことである。また本実施例の車載用ナビゲーション装置は、出発地が充電可能な場所でなければ往復走行判定を行う意味がないので、出発地が充電不可能な場所であれば、往復走行判定のモードが選択されないことになる。
まず、目的地設定手段により目的地の設定を行う(ステップ101)。目的地設定手段は、地図記憶手段15、制御手段10、入力手段18、表示手段19で構成されている。具体的には、ユーザが望む目的地を表示手段19により表示された地図上で入力手段18により指定したり、入力手段18を介して目的地の施設名或いは電話番号等を直接入力したりすることにより目的地の設定を行う。
つぎに、設定された目的地と、充電可能な出発地と、地図記憶手段15に記憶されている道路ノードデータ及び道路リンクデータを含む道路情報とに基づき、経路探索手段16が目的地までの最適な経路を探索する(ステップ102)。本実施例においては、充電可能な出発地をユーザの自宅ということで説明を行う。
つぎに、ステップ102で探索した最適経路にもとづき、自宅から設定された目的地まで行って、目的地から自宅まで帰ってくる、つまり電気自動車による自宅と目的地との間での往復走行が可能か否かを、制御手段10は判定する(ステップ103)。具体的には、経路探索手段16により探索された最適経路の走行所要時間と、電気自動車の走行状態における単位時間当たりの電力使用量から、往復するのに必要なバッテリの必要容量を算出し、このバッテリの必要容量と、バッテリ残量検出手段21により検出されたバッテリの残量と、を比較することによって往復走行が可能か否かを判定する。
制御手段10が自宅から目的地までの往復走行が可能であると判定すると(ステップ103、YES)、制御手段10はステップ102で探索した最適経路を表示手段19に表示し(ステップ104)、車載用ナビゲーション装置が本来備えている経路案内の処理を開始して(ステップ105)、目的地までの経路案内を開始することでこのフローを終了する。
制御手段10が自宅から目的地までの往復走行が不可能であると判定すると(ステップ103、NO)、つぎに代替施設を探すか否かの判定を行う(ステップ106)。具体的には、現在のバッテリの残量では自宅から目的地までの往復走行が不可能である旨を、表示手段19を介してユーザに伝え、制御手段10はユーザに代替施設を検索するか否かの選択を迫る。そしてユーザが入力手段18を介して入力する代替施設を検索するか否かの選択によって、その後の処理が変ってくる。
このように、ユーザに代替施設を探すか否かを選択可能にしておけば、例えばコンビニエンスストアであれば通常は代替可能と考えられるが、時にはユーザにとってどうしても設定した目的地のコンビニエンスストアでなければならないこともあり得るので、このような場合に非常に便利である。
ユーザが代替施設の検索を希望しないことにより、代替施設を探さないということになると(ステップ106、NO)、表示手段19等を用いて、電気自動車の充電が必要である旨をユーザに案内し(ステップ107)、制御手段10はこのフローを終了する。なお、ユーザへの案内は、音声報知手段20により行ってもよい。またステップ106の代替施設を探すか否かの判定を行わないで、ステップ103で自宅から目的地までの往復走行が不可能とわかったら、ステップ106の処理を行わず、ステップ107により電気自動車の充電が必要である旨をユーザに伝える構成としてもよい。
ユーザが代替施設の検索を希望することにより、代替施設を探すということになると(ステップ108、YES)、制御手段10は、当初設定された目的地から代替可能な施設の検索を開始し(ステップ108)、代替施設があるか否かの判定を行う(ステップ109)。
具体的には、まず当初設定された目的地に関するエリア情報を代替施設記憶手段22から得て、設定された目的地の属するエリアを調べる。つぎに設定された目的地と同じエリア内に、設定された目的地の分類情報と同じ分類情報をもった施設があるかないかを調べる。同じ施設があれば「代替施設あり」として次の処理を進め、同じ施設がなければ「代替施設なし」として次の処理を進める。
そして、ステップ109で「代替施設あり」と判定されると、つぎにその代替施設までの経路探索(代替経路探索)を経路探索手段16が行う。この代替経路探索は、ステップ102と同様の方法で行えばよい。なお、代替施設が複数あればそれぞれの代替施設について代替経路検索を行うことになる。
つぎに、ステップ110で探索した代替施設までの最適経路にもとづき、自宅から代替施設まで行って、代替施設から自宅まで帰ってくることが可能か否かを、制御手段10は判定する(ステップ111)。具体的な判定の方法はステップ103と同様の方法により判定を行えばよい。なおステップ110で複数の代替施設について最適経路を探索しているのであれば、いずれの経路についても判定を行い、往復走行が可能な代替施設が一つでも存在していれば、往復走行可能と判定する。
そして自宅と代替施設との間での往復走行が不可能であれば、ステップ107に進み、電気自動車の充電が必要である旨をユーザに案内し、制御手段10はこのフローを終了する。
自宅と代替施設との間での往復走行が可能であれば、ステップ112に進み、ステップ110で探索した代替施設までの最適経路を表示手段19に表示し(ステップ112)、車載用ナビゲーション装置が備える経路案内の処理を開始して(ステップ113)、代替施設までの経路案内を開始することで、制御手段10このフローを終了する。なお、複数の代替施設について往復走行が可能であれば、どの代替施設を選択するのかユーザに選択させる構成としてもよい。
そして、ステップ109で「代替施設なし」と判定されると、制御手段10は電気自動車のバッテリが完全充電状態か否かについて判定を行う(ステップ114)。具体的にはバッテリ残量検出手段21により検出された残量にもとづいて制御手段10は判定を行う。残量が完全な状態であれば完全充電状態ということになり、バッテリへのこれ以上の充電は行えない状態となる。反対に完全充電状態でなければバッテリへの充電がまだ可能ということになる。
電気自動車のバッテリが完全充電状態であれば、走行注意の案内を表示手段19或いは音声報知手段20により行って(ステップ115)、制御手段10はこのフローを終了する。すなわち、バッテリが完全充電状態であっても、自宅と目的地との間の往復が不可能で、代替施設もない場合、ユーザはかなり遠くの目的地を設定しているものと思われる。したがってユーザが設定している目的地は、バッテリが完全充電状態であっても、往復できない旨をユーザに伝えておくことで、ユーザが目的地を変更したり、充電スタンドを経由した運転を行う必要があることを促すことができる。
電気自動車のバッテリが完全充電状態でなければ、充電する必要があることを案内して(ステップ116)、この処理を終了する。なお。ステップ114の電気自動車のバッテリが完全充電状態であるか否かの判定は、必ず行う必要があるものではなく、ステップ109で代替施設がなければ、ステップ116のように充電する必要があることを案内する構成としてもよい。
このように本発明の車載用ナビゲーション装置によれば、充電可能な出発地点を基準として、出発地と目的地との間の往復走行を行うことができるか否かを判定する。こうすることによって、電気自動車を走行させる前に、電気自動車による往復走行ができるかどうかがわかる。そして、このことは運転前にわかるので、運転中に出発地へ帰還できなくなるとの警告が行われることはなく、ドライバは安心して運転することが可能となる。また往復走行ができないのであれば、事前に出発地で確実に充電を行う機会が得られるので、充電ができないというようなことも生じない。
なお、本実施例において、充電可能な出発地を、現在地検出手段14を用いて特定する構成としてもよい。具体的には、予め自宅や、充電施設を備えた駐車場など、充電可能な施設の位置情報等をナビゲーション装置に備えておき、現在地検出手段14で検出された現在地と、登録されている施設の位置が一致するか否かにより、出発地を特定する構成としてもよい。このような構成であれば、ユーザが出発地を特に意識することなく、往復走行判定のモードを利用することができる。特に、ユーザの自宅以外の場所が出発地になる場合に、充電装置があるか否かをユーザが把握しておく必要がないので便利である。また複数の充電可能な出発地を予めナビゲーション装置に備えておき、入力手段を介して充電可能な出発地のリストから出発地を選択できるようにして、充電可能な出発地を特定する構成にしてもよい。
また、例えば出発地は車両を停車している自宅の駐車場であるが、この駐車場には充電装置がなく、充電を行うには自宅の別の場所へ車両を少し移動させなければならない、というような場合であっても、ここで述べている「充電可能な出発地」に自宅の駐車場が含まれるのは当然である。
次に、図3のフローチャートを用いて説明した本実施例における車載用ナビゲーション装置の動作について、図4と図5の概念図を用いて説明を行う。
図4では、道路が表示された地図上に自宅である出発地31、目的地32、施設33を示している。まず車載用ナビゲーション装置を自宅である出発地31で起動し、往復走行判定モードを選択する。そして目的地32を設定する。目的地32を設定すると、車載用ナビゲーション装置ではステップ102にもとづき出発地31から目的地32までの最適経路(図4では一点鎖線で示す)が探索される。
目的地32は出発地31から離れており、電気自動車のバッテリ残量では往復走行は不可能なものとして説明を続ける。目的地32まで行って出発地31へ帰還することが不可能なので、ユーザが代替施設の検索を希望したものとして、つぎにステップ108にもとづき代替施設の検索がなされる。そして電気自動車のバッテリ残量で往復走行が可能な代替施設として施設33が見つかると、ステップ112にもとづき施設33までの代替経路が表示される(図4では二点鎖線で示す)。
このように、車載用ナビゲーション装置は、出発地31と目的地32との間で往復走行が不可能であれば、代替施設である施設33を探しだして施設33を案内するので、バッテリの残量で往復できる施設を簡単に知ることができる。
図5では、道路が表示された地図上に自宅である出発地31、目的地32´を示している。図4と同様に目的地32´を設定し、出発地31から目的地32までの最適経路が探索される。目的地32´も出発地31から離れており、電気自動車のバッテリ残量では往復走行不可能なものとして説明を続ける。目的地32´まで行って出発地31へ帰還することが不可能なので、ユーザは代替施設の検索を希望したものとして、代替施設の検索がなされる。しかしながら、図5においては、図4と異なり代替施設が見つからなかったので、ステップ116にもとづき充電を行うよう案内がなされる。
このように、車載用ナビゲーション装置は、出発地31と目的地32´との間で往復走行が不可能であり、代替施設も見つからなければ、充電を行うよう案内がなされる。したがって、出発地31から移動していないので、出発地31である自宅において確実に充電を行うことができる。自宅であれば確実に充電を行うことができるので、このような車載用ナビゲーション装置は充電スタンドがまだまだ整備されていない地域において特に有効である。
なお、図3に示すフローチャートでは、ステップ102においてステップ101で設定された目的地について経路探索を行い最適経路の探索を行い、ステップ103においてこの最適経路とバッテリ残量との間で往復走行が可能か否かを判定している。しかしながら、必ずしても最適経路の探索をする必要はなく、例えば出発地の位置情報と、目的地の位置情報とにもとづき直線距離を算出し、直線経路によって往復走行が可能か否かを判定してもよい。このように直線経路にもとづく往復走行であれば、最適経路の検索を行う必要がないため処理の高速化に資する。
また、ステップ111においても代替施設までの最適経路とバッテリ残量との間で往復走行が可能か否かの判定を行っているが、この場合にも出発地の位置情報と、代替施設の位置情報とにもとづき直線距離を算出し、直線経路によって判定を行ってもよい。また、設定された目的地については最適経路により往復走行が可能か否かの判定を行い、代替施設については直線経路により往復走行が可能か否かの判定を行ってもよい。このような構成であれば、最適経路の検索処理を減らすことが可能となりより処理の高速化を図ることができる。
また、上述した実施形態では、目的地の設定を一つしか設定していないが、目的地の設定は複数であっても構わない。例えば、目的地を二つ設定した場合、出発地から第1の目的地を経由して、第2に目的地に行って、第2の目的地から出発地に帰還する経路となるが、このような経路で走行が可能な否かを判定すればよい。
また、ステップ102で経路探索を行っているが、実施例のように出発地から目的地までの片道の経路に基づいて往復走行が可能か否かを判定してもよい(つまり目的地から出発地までの帰路も同じ経路を利用するものとして判定する)、このような判定を行う場合、片道のみの経路探索であれば、処理の高速化を図ることも可能である。一方、経路によっては一方通行などにより、実際の経路が往路と復路で異なることがある。そのため、他の実施形態として、出発地から目的地までの経路探索を行い、帰路である目的地から出発地までの経路探索を行って往復走行が可能か否か判定してもよい(つまり往路、復路それぞれ経路探索を行って判定する)。このように往路と復路の経路をそれぞれ探索しておけば、往復走行が可能か否かのより正確な判定を行うことが可能となる。またステップ110における出発地と代替施設との間の経路についても同様である。
また、代替施設の検索に関しては、バッテリ残量にもとづき往復走行可能なエリアを算出し、そのエリアに含まれる代替施設が複数あれば、それらをすべて表示し、ユーザが複数の代替施設の中から選択できるようにしてもよい。具体例を図6に示している。まずバッテリ残量にもとづき往復走行可能なエリアを算出すると、そのエリアについて出発地31を中心とする円で表示する(図6では点線で示す)。そして代替施設の位置情報から、このエリアに含まれるとともに、目的地32と同じ分類情報からなる施設34、35、36をすべて表示する。そしてこの中から入力手段18を介してユーザが好きな代替施設を選択し、選択された代替施設に関する代替経路の検索を行う構成としてもよい。このようにしておけば、当初の目的地まで行けなくとも、代替施設に関してユーザの好みを十分に反映させることが可能となる。
また、上述した実施形態では、本発明の車載用ナビゲーション装置を電気自動車に適用するものとして説明した。これはガソリン自動車であればガソリンスタンドが多数設けられているため、出発した後でも目的地へ向かう途中でガソリンの給油を行うことは十分可能であるが、一方で電気自動車の場合は、充電スタンドの数がまだまだ少なく走行途中での充電は難しい反面、自宅など出発であれば通常充電設備が整っているため、確実に充電を行うことができるためである。したがって、本発明の車載用ナビゲーション装置は、待機先で燃料の補充を行う車両についても適用が可能である。例えば天然ガス自動車を用いるタクシー会社等であれば、社内に天然ガスの供給スタンド通常備えているが、天然ガスの補充先は限られている。このような場合、本発明の車載用ナビゲーション装置を天然ガス自動車に用いることも可能である。
【符号の説明】
【0010】
10 制御手段
14 現在地検出手段
15 地図記憶手段
16 経路探索手段
17 通信手段
18 入力手段
19 表示手段
20 音声報知手段
21 バッテリ残量検出手段
22 代替施設記憶手段
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関するものであり、特に、電気自動車などにおいて燃料の残量により充電可能な出発地から目的地までの往復走行が可能か否かを判定する車載用ナビゲーション装置に関するものである。
【背景技術】
【0002】
現在も主流であるガソリン自動車に変るものとして、電気モータを動力源とする電気自動車が登場してきている。この電気自動車は電気モータを動作させるのに電気が必要となるため、当然であるがバッテリの残量がなくなってしまうと走行できなくなってしまう。
そこで、特許文献1(特開2004−266898号公報)には、車両の現在位置と車両の帰還地(自宅)とを把握しながら、現在のバッテリの残量で帰還地まで到達するのが難しくなる前に、ドライバへ警告を行うものが記載されている。
なお、バッテリの残量を精度よく検出して表示する技術として、特許文献2(特開閉4−368401号公報)に開示されたバッテリの残存容量表示装置が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−266898号公報
【特許文献2】特開平4−368401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているものは、車両の現在地と帰還地とを常に把握しながらバッテリの残量に応じて警告を行うものである。つまり実際に車両が走行している際に帰還が難しくなると警告を行うものである。
しかし、目的地を決めないでドライブするような場合であれば特許文献1のようなものでもよいが、通常ドライバは目的地を決めてから運転することが多い。このような場合に目的地付近まで来ていながら、バッテリの残量不足のために警告が行われてもドライバとしては目的地まで行くべきか、帰還するべきか判断に迷ってしまい、かえって運転中に動揺してしまう虞がある。また出発後、しばらく経って帰還の警告が行われたのでは、それまでの走行が無駄になってしまう。
さらに、特許文献1には帰還地として充電可能なスタンドを設定しておき、バッテリの不残量が不足するとこのスタンドの場所へ案内することも記載されている。
しかし、電気自動車が登場してきているとはいえ、まだまだ普及しているわけではないので、充電可能なスタンドの数もガソリンスタンドの数に比べまだまだ限られている。とくに大都市以外の地域になればなるほど充電可能なスタンドの数は限られてくる。また充電可能なスタンドであっても、定休日や臨時休業ということもあり得るし、スタンドでは充電できる装置の数が限られているので使用中ということもあり得るので、必ずしも確実に充電が行えるわけではない。したがって、電気自動車においては特許文献1のような帰還地(出発地)と現在地と帰還地(スタンド)の3つの拠点を把握して、バッテリの残量にもとづく帰還の警告を行うことは現実的ではない。
そこで、本発明は車両による走行を行う前に、充電可能な出発地と目的地との間を往復して走行できるかどうかの判断を行うことで、運転中の警告を行うことを防ぎ、また往復できないのであれば出発地で燃料の補充を行わせることで確実な燃料補充の機会を与えることが可能な車載用ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記課題を解決するために、本願の請求項1にかかる発明は、車両を走行させるための燃料の残量を検出する残量検出手段と、目的地を設定する目的地設定手段と、車両を走行させるための燃料の残量を検出する残量検出手段と、充電可能な出発地から前記目的地との間の往復走行が燃料の残量により可能か否かを判定する判定手段と、を備えることを特徴とする車載用ナビゲーション装置である。
また、本願の請求項2にかかる発明は、請求項1に記載の車載用ナビゲーション装置において、前記目的地の代替施設を記憶する代替施設記憶手段と、設定された前記目的地との間で往復走行が不可能な場合に、前記代替施設記憶手段から代替施設を検索する代替施設検索手段と、を備え、前記判定手段は、前記出発地と前記代替施設検索手段により検索された代替施設との間の往復走行が検出された前記燃料の残量により可能か否かについても判定することを特徴とする。
また、本願の請求項3にかかる発明は、請求項2に記載の車載用ナビゲーション装置において、前記出発地と前記代替施設との間の経路を探索する経路探索手段を備え、前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項4にかかる発明は、請求項2に記載の車載用ナビゲーション装置において、前記判定手段は、前記出発地と前記代替施設との間の直線経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項5にかかる発明は、請求項1から4のいずれか一項に記載の車載用ナビゲーション装置において、前記出発地と前記目的地との間の経路を探索する経路探索手段を備え、前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする。
また、本願の請求項6にかかる発明は、請求項1から4のいずれか一項に記載の車載用ナビゲーション装置において、前記判定手段は、前記出発地と前記目的地との間の直線経路にもとづいて判定を行うことを特徴とする
また、本願の請求項7にかかる発明は、請求項2から4のいずれか一項に記載の車載用ナビゲーション装置において、前記代替施設検索手段によって代替施設が見つからなかった場合に、燃料が満杯であるか否かの判定を行うことを特徴とする。
また、本願の請求項8にかかる発明は、請求項1から7のいずれか一項に記載の車載用ナビゲーション装置において、前記車載用ナビゲーション装置は、車両の現在地を検出する現在地特定手段と、充電可能な位置情報と、を備えており、前記現在地特定手段により検出された車両の現在地が、前記充電可能な位置情報と一致するか否かにより、前記充電可能な出発地が特定されることを特徴とする。
また、本願の請求項1から8のいずれか一項に記載の車載用ナビゲーション装置において、前記車両を走行させるための燃料は、電気自動車を走行させるためのバッテリに充電された電力であることを特徴とする。
【発明の効果】
【0006】
請求項1にかかる発明においては、車両を走行させるための燃料の残量を検出する残量検出手段と、目的地を設定する目的地設定手段と、充電可能な出発地から前記目的地との間の往復走行が検出された前記燃料の残量により可能か否かを判定する判定手段と、を備える車載用ナビゲーション装置として構成されている。
このような構成にすることにより、現在の燃料の残量によって出発地と目的地との間の往復を行えるかどうかが車両を走行する前にわかるので、車両の走行途中で帰還警告を受けることがないので、ドライバは安心して運転を行うことができる。また、出発地と目的地との間で往復できないことを、出発地で知ることができるので、出発地で燃料の補充が行える車両であれば確実にその場で燃料の補充を行うことができる。
請求項2にかかる発明においては、請求項1にかかる発明において、出発地と目的地との間で往復できない場合には、往復可能な代替施設がないか判定してくれるので、利便性を向上することができる。
請求項3にかかる発明においては、請求項2にかかる発明において、代替施設との間の経路を検索した上で、出発地と代替施設との間で往復が可能か否かを判定するので、より正確な判断を行うことが可能となる。
請求項4にかかる発明においては、請求項2にかかる発明において、出発地と代替施設との間の直線経路にもとづいて往復が可能か否かを判定するので、複雑な経路探索が必要ないので判定の処理を早くすることが可能となる。
請求項5にかかる発明においては、請求項1から4のいずれかにかかる発明において、目的地との間の経路を検索した上で、出発地と目的地との間で往復が可能か否かを判定するので、より正確な判断を行うことが可能となる。
請求項6にかかる発明においては、請求項1から4のいずれかにかかる発明において、出発地と目的地との間の直線経路にもとづいて往復が可能か否かを判定するので、複雑な経路探索が必要ないことで判定の処理を早くすることが可能となる。
請求項7にかかる発明においては、請求項2から4のいずれかにかかる発明において、燃料が満杯であるか否かの判定を行うので、燃料が満杯であれば長距離の走行が考えられるので、燃料切れが発生することを事前に伝えることができる。
請求項8にかかる発明においては、請求項1から7のいずれかにかかる発明において、車両の現在地が、充電可能な位置であるか否か特定されるので、ユーザにおいて充電可能な出発地をとくに意識する必要がない。
請求項9にかかる発明においては、請求項1から8のいずれかにかかる発明において、
燃料が電気自動車のバッテリの電力なので、充電スタンドの数がまだまだ限られている反面、通常充電設備が出発地には備えられているので、バッテリの電力を燃料に走行する電気自動車により適している。
【図面の簡単な説明】
【0007】
【図1】本発明の実施形態にかかる車載用ナビゲーション装置の要部構成を示すブロック図である。
【図2】本発明の実施形態における代替施設情報の一例について示す図である。
【図3】本発明の実施形態にかかる車載用ナビゲーション装置の動作フローチャートである。
【図4】本発明の実施形態にかかる車載用ナビゲーション装置の動作の概念を示す概念図である。
【図5】本発明の実施形態にかかる車載用ナビゲーション装置の動作の概念を示す別の概念図である。
【図6】本発明の他の実施形態における車載用ナビゲーション装置の動作の概念を示す概念図である。
【発明を実施するための形態】
【0008】
以下、本発明の具体例を実施例及び図面を用いて詳細に説明する。但し、以下に示す実施例は、本発明の技術的思想を具体化するための車載用ナビゲーション装置を例示するものであって、本発明をこの車載用ナビゲーション装置に特定することを意図するものではなく、本発明の技術的範囲は、特許請求の範囲の記載によって定められるものである。
【実施例】
【0009】
図1は、本実施例である電気自動車に搭載される車載用ナビゲーション装置の要部構成を示すブロック図である。なおこの車載用ナビゲーション装置は、電気自動車の社内に固定して取り付けられたものでもよく、また電気自動車に対して取り外し可能に取り付けられるものでも構わない。
制御手段10は、CPU11、ROM12、RAM13からなるプロセッサで構成されている。そしてROM12、RAM13に記録された制御プログラム等に従って、車載用ナビゲーション装置の各部の動作が制御される。この制御プログラムには、車載用ナビゲーション装置の主な機能である経路案内を行うプログラムや、よく走行する経路を学習して経路探索に反映させる機能などのプログラムが格納されている。そして後述する本発明における、往復走行判定のプログラムも格納されることになる。なお、後述するように、制御手段10は、電気自動車が出発地から目的地まで行って帰ってくることができるか否かを判定する判定手段として機能するとともに、目的地までの往復が不可能な場合に目的地の代わりとなる代替施設がないか否かを検索する代替施設検索手段としても機能する。
現在地検出手段14は、地球の上空を周回している複数のGPS衛星から時刻情報を含む電波を受信するGPS受信機等で構成され、受信した電波に基づき現在地を検出する。また、現在地検出手段14としては、距離センサ、方位センサ、舵角センサ等からなる自立航法装置を用いることもできる。
なお、自宅に電気自動車を停車させ、つぎに電気自動車を運転する際には、その場所が出発地点となる。そしてこの車載用ナビゲーション装置が起動されると、電気自動車を停車させていた自宅の位置が現在地検出手段14によって検出されることになる。したがって現在地検出手段14は、出発地を特定することになるので後述する出発地特定手段も兼ねている。
地図記憶手段15は、道路の分岐地点等の結節点をノードとする道路ノードデータと、それぞれのノード間を結ぶ経路をリンクとした道路リンクデータとを含む道路情報を記憶している。道路ノードデータには、道路ノード番号、位置座標、接続リンク本数、分岐地点名称等が記憶されている。
また、道路リンクデータには、始点及び終点となる道路ノード番号、道路種別、リンク長(リンクコスト)、所要時間、制限速度、車線数、車道幅等の道路属性が含まれる。道路リンクデータには、さらに道路属性として橋、トンネル、踏切、料金所等のデータが付与される。道路種別とは、高速道路や有料道路の別、国道や都道府県道等の別を含む情報である。
さらに、地図記憶手段15には、海岸線、湖沼、河川形状等の水系データ、行政境界データ、ガソリンスタンドや飲食店の位置、施設形状、施設名称を含む施設情報が記憶されている。
経路探索手段16は、地図記憶手段15に記憶されている道路情報を参照し、現在地から目的地に至る電気自動車の最適経路を探索する。最適経路の探索は、例えば、現在地から目的地に対応する道路ノードまでに至るリンクとノードをダイクストラ法等の各種の手法によって探索し、リンク長(リンクコスト)や所要時間等を累積し、総リンク長又は総所要時間が最短となる経路を最適経路とし、当該経路に属する道路ノードやリンクを最適経路データとして提供するものである。
通信手段17は、例えば、インフラとして所定の地点に配備されているVICS(登録商標)等の情報提供システムを介して通信を行い、渋滞情報を含む交通情報を定期的に取得するものである。
入力手段18は、車載用ナビゲーション装置における操作入力や目的地の入力を行う各種キー、スイッチ等から構成される。
表示手段19は、地図画像や経路の画像、自車両の位置、案内する目的地や各種施設の位置等を表示するものであり、液晶ディスプレイ等の表示装置で構成される。なお、この表示手段19である表示装置にタッチセンサからなる入力装置を一体化し、入力手段18として機能させることもできる。この場合、ディスプレイ上に表示されたアイコンをユーザが触れることで入力が行われる。
音声報知手段20は、探索された経路に関する情報や外部から取得した交通情報等を音声で案内するものである。
バッテリ残量検出手段21は、電気自動車の走行に必要な電力を供給するバッテリの残量を検出するものである。なお、バッテリの残量は、駆動源に供給される電流値を検出して算出することができ、例えば、特許文献2(特開平4−368401)に開示された周知の方法が利用可能である。なお、本実施例におけるバッテリ残量とは、本発明における燃料の残量の一例である。
代替施設記憶手段22は、施設毎の情報を記憶しておくものである。具体的には、施設情報、分類情報、位置情報、エリア情報が記憶されている。
施設情報は、建物の実際の名称等で構成されている。分類情報は、施設の種類、例えばコンビニエンスストアであったり、玩具屋であったり、公園であったりと、その施設の属する総称を付与することで構成されている。位置情報は、その施設のある緯度と経度の情報など、その施設が設けられている場所が特定できる情報で構成されている。エリア情報は、その施設が設けられているエリアに関する情報である。このエリアは例えば県単位であったり、市単位であったりと、施設がどのエリアに属しているかを知るための情報である。なおこの代替施設記憶手段22を書き換え可能にしておくことで、最新の情報を入手できるようにしておくとよい。
これらの一例を示したものを図2に示す。例えば図2における施設AAAは、分類がコンビニエンスストアであり、緯度と経度からなる位置情報(XX1:YY1)を有し、またエリア情報からA1エリアに属していることがわかる。そしてA1エリアには、同分類のコンビニエンスストアが存在していないので、施設AAAに代替する目的地がこのエリアに存在していないことがわかる。施設BBBの場合は、A1エリアに同分類のスーパーマーケットである施設CCCが存在しているので、施設BBBに代替する目的地が存在していることがわかる。なお、この代替施設記憶手段22は、地図記憶手段15の中に設けられていても構わない。
次に、図3のフローチャートを用いて、本実施例における車載用ナビゲーション装置の動作を説明する。まずユーザが電気自動車に乗車し、このナビゲーション装置を起動させ、入力手段18を介して本実施例である往復走行判定のモードを選択することにより、図3のフローチャートの処理が開始される。なおこの往復走行判定とは、電気自動車のバッテリの残量で、出発地を出て設定した目的地まで行った後、目的地からまた出発地まで戻ってくることができるか否かを判定する処理のことである。また本実施例の車載用ナビゲーション装置は、出発地が充電可能な場所でなければ往復走行判定を行う意味がないので、出発地が充電不可能な場所であれば、往復走行判定のモードが選択されないことになる。
まず、目的地設定手段により目的地の設定を行う(ステップ101)。目的地設定手段は、地図記憶手段15、制御手段10、入力手段18、表示手段19で構成されている。具体的には、ユーザが望む目的地を表示手段19により表示された地図上で入力手段18により指定したり、入力手段18を介して目的地の施設名或いは電話番号等を直接入力したりすることにより目的地の設定を行う。
つぎに、設定された目的地と、充電可能な出発地と、地図記憶手段15に記憶されている道路ノードデータ及び道路リンクデータを含む道路情報とに基づき、経路探索手段16が目的地までの最適な経路を探索する(ステップ102)。本実施例においては、充電可能な出発地をユーザの自宅ということで説明を行う。
つぎに、ステップ102で探索した最適経路にもとづき、自宅から設定された目的地まで行って、目的地から自宅まで帰ってくる、つまり電気自動車による自宅と目的地との間での往復走行が可能か否かを、制御手段10は判定する(ステップ103)。具体的には、経路探索手段16により探索された最適経路の走行所要時間と、電気自動車の走行状態における単位時間当たりの電力使用量から、往復するのに必要なバッテリの必要容量を算出し、このバッテリの必要容量と、バッテリ残量検出手段21により検出されたバッテリの残量と、を比較することによって往復走行が可能か否かを判定する。
制御手段10が自宅から目的地までの往復走行が可能であると判定すると(ステップ103、YES)、制御手段10はステップ102で探索した最適経路を表示手段19に表示し(ステップ104)、車載用ナビゲーション装置が本来備えている経路案内の処理を開始して(ステップ105)、目的地までの経路案内を開始することでこのフローを終了する。
制御手段10が自宅から目的地までの往復走行が不可能であると判定すると(ステップ103、NO)、つぎに代替施設を探すか否かの判定を行う(ステップ106)。具体的には、現在のバッテリの残量では自宅から目的地までの往復走行が不可能である旨を、表示手段19を介してユーザに伝え、制御手段10はユーザに代替施設を検索するか否かの選択を迫る。そしてユーザが入力手段18を介して入力する代替施設を検索するか否かの選択によって、その後の処理が変ってくる。
このように、ユーザに代替施設を探すか否かを選択可能にしておけば、例えばコンビニエンスストアであれば通常は代替可能と考えられるが、時にはユーザにとってどうしても設定した目的地のコンビニエンスストアでなければならないこともあり得るので、このような場合に非常に便利である。
ユーザが代替施設の検索を希望しないことにより、代替施設を探さないということになると(ステップ106、NO)、表示手段19等を用いて、電気自動車の充電が必要である旨をユーザに案内し(ステップ107)、制御手段10はこのフローを終了する。なお、ユーザへの案内は、音声報知手段20により行ってもよい。またステップ106の代替施設を探すか否かの判定を行わないで、ステップ103で自宅から目的地までの往復走行が不可能とわかったら、ステップ106の処理を行わず、ステップ107により電気自動車の充電が必要である旨をユーザに伝える構成としてもよい。
ユーザが代替施設の検索を希望することにより、代替施設を探すということになると(ステップ108、YES)、制御手段10は、当初設定された目的地から代替可能な施設の検索を開始し(ステップ108)、代替施設があるか否かの判定を行う(ステップ109)。
具体的には、まず当初設定された目的地に関するエリア情報を代替施設記憶手段22から得て、設定された目的地の属するエリアを調べる。つぎに設定された目的地と同じエリア内に、設定された目的地の分類情報と同じ分類情報をもった施設があるかないかを調べる。同じ施設があれば「代替施設あり」として次の処理を進め、同じ施設がなければ「代替施設なし」として次の処理を進める。
そして、ステップ109で「代替施設あり」と判定されると、つぎにその代替施設までの経路探索(代替経路探索)を経路探索手段16が行う。この代替経路探索は、ステップ102と同様の方法で行えばよい。なお、代替施設が複数あればそれぞれの代替施設について代替経路検索を行うことになる。
つぎに、ステップ110で探索した代替施設までの最適経路にもとづき、自宅から代替施設まで行って、代替施設から自宅まで帰ってくることが可能か否かを、制御手段10は判定する(ステップ111)。具体的な判定の方法はステップ103と同様の方法により判定を行えばよい。なおステップ110で複数の代替施設について最適経路を探索しているのであれば、いずれの経路についても判定を行い、往復走行が可能な代替施設が一つでも存在していれば、往復走行可能と判定する。
そして自宅と代替施設との間での往復走行が不可能であれば、ステップ107に進み、電気自動車の充電が必要である旨をユーザに案内し、制御手段10はこのフローを終了する。
自宅と代替施設との間での往復走行が可能であれば、ステップ112に進み、ステップ110で探索した代替施設までの最適経路を表示手段19に表示し(ステップ112)、車載用ナビゲーション装置が備える経路案内の処理を開始して(ステップ113)、代替施設までの経路案内を開始することで、制御手段10このフローを終了する。なお、複数の代替施設について往復走行が可能であれば、どの代替施設を選択するのかユーザに選択させる構成としてもよい。
そして、ステップ109で「代替施設なし」と判定されると、制御手段10は電気自動車のバッテリが完全充電状態か否かについて判定を行う(ステップ114)。具体的にはバッテリ残量検出手段21により検出された残量にもとづいて制御手段10は判定を行う。残量が完全な状態であれば完全充電状態ということになり、バッテリへのこれ以上の充電は行えない状態となる。反対に完全充電状態でなければバッテリへの充電がまだ可能ということになる。
電気自動車のバッテリが完全充電状態であれば、走行注意の案内を表示手段19或いは音声報知手段20により行って(ステップ115)、制御手段10はこのフローを終了する。すなわち、バッテリが完全充電状態であっても、自宅と目的地との間の往復が不可能で、代替施設もない場合、ユーザはかなり遠くの目的地を設定しているものと思われる。したがってユーザが設定している目的地は、バッテリが完全充電状態であっても、往復できない旨をユーザに伝えておくことで、ユーザが目的地を変更したり、充電スタンドを経由した運転を行う必要があることを促すことができる。
電気自動車のバッテリが完全充電状態でなければ、充電する必要があることを案内して(ステップ116)、この処理を終了する。なお。ステップ114の電気自動車のバッテリが完全充電状態であるか否かの判定は、必ず行う必要があるものではなく、ステップ109で代替施設がなければ、ステップ116のように充電する必要があることを案内する構成としてもよい。
このように本発明の車載用ナビゲーション装置によれば、充電可能な出発地点を基準として、出発地と目的地との間の往復走行を行うことができるか否かを判定する。こうすることによって、電気自動車を走行させる前に、電気自動車による往復走行ができるかどうかがわかる。そして、このことは運転前にわかるので、運転中に出発地へ帰還できなくなるとの警告が行われることはなく、ドライバは安心して運転することが可能となる。また往復走行ができないのであれば、事前に出発地で確実に充電を行う機会が得られるので、充電ができないというようなことも生じない。
なお、本実施例において、充電可能な出発地を、現在地検出手段14を用いて特定する構成としてもよい。具体的には、予め自宅や、充電施設を備えた駐車場など、充電可能な施設の位置情報等をナビゲーション装置に備えておき、現在地検出手段14で検出された現在地と、登録されている施設の位置が一致するか否かにより、出発地を特定する構成としてもよい。このような構成であれば、ユーザが出発地を特に意識することなく、往復走行判定のモードを利用することができる。特に、ユーザの自宅以外の場所が出発地になる場合に、充電装置があるか否かをユーザが把握しておく必要がないので便利である。また複数の充電可能な出発地を予めナビゲーション装置に備えておき、入力手段を介して充電可能な出発地のリストから出発地を選択できるようにして、充電可能な出発地を特定する構成にしてもよい。
また、例えば出発地は車両を停車している自宅の駐車場であるが、この駐車場には充電装置がなく、充電を行うには自宅の別の場所へ車両を少し移動させなければならない、というような場合であっても、ここで述べている「充電可能な出発地」に自宅の駐車場が含まれるのは当然である。
次に、図3のフローチャートを用いて説明した本実施例における車載用ナビゲーション装置の動作について、図4と図5の概念図を用いて説明を行う。
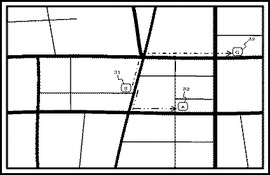
図4では、道路が表示された地図上に自宅である出発地31、目的地32、施設33を示している。まず車載用ナビゲーション装置を自宅である出発地31で起動し、往復走行判定モードを選択する。そして目的地32を設定する。目的地32を設定すると、車載用ナビゲーション装置ではステップ102にもとづき出発地31から目的地32までの最適経路(図4では一点鎖線で示す)が探索される。
目的地32は出発地31から離れており、電気自動車のバッテリ残量では往復走行は不可能なものとして説明を続ける。目的地32まで行って出発地31へ帰還することが不可能なので、ユーザが代替施設の検索を希望したものとして、つぎにステップ108にもとづき代替施設の検索がなされる。そして電気自動車のバッテリ残量で往復走行が可能な代替施設として施設33が見つかると、ステップ112にもとづき施設33までの代替経路が表示される(図4では二点鎖線で示す)。
このように、車載用ナビゲーション装置は、出発地31と目的地32との間で往復走行が不可能であれば、代替施設である施設33を探しだして施設33を案内するので、バッテリの残量で往復できる施設を簡単に知ることができる。
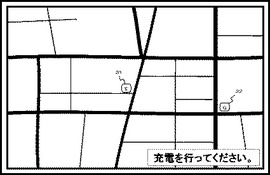
図5では、道路が表示された地図上に自宅である出発地31、目的地32´を示している。図4と同様に目的地32´を設定し、出発地31から目的地32までの最適経路が探索される。目的地32´も出発地31から離れており、電気自動車のバッテリ残量では往復走行不可能なものとして説明を続ける。目的地32´まで行って出発地31へ帰還することが不可能なので、ユーザは代替施設の検索を希望したものとして、代替施設の検索がなされる。しかしながら、図5においては、図4と異なり代替施設が見つからなかったので、ステップ116にもとづき充電を行うよう案内がなされる。
このように、車載用ナビゲーション装置は、出発地31と目的地32´との間で往復走行が不可能であり、代替施設も見つからなければ、充電を行うよう案内がなされる。したがって、出発地31から移動していないので、出発地31である自宅において確実に充電を行うことができる。自宅であれば確実に充電を行うことができるので、このような車載用ナビゲーション装置は充電スタンドがまだまだ整備されていない地域において特に有効である。
なお、図3に示すフローチャートでは、ステップ102においてステップ101で設定された目的地について経路探索を行い最適経路の探索を行い、ステップ103においてこの最適経路とバッテリ残量との間で往復走行が可能か否かを判定している。しかしながら、必ずしても最適経路の探索をする必要はなく、例えば出発地の位置情報と、目的地の位置情報とにもとづき直線距離を算出し、直線経路によって往復走行が可能か否かを判定してもよい。このように直線経路にもとづく往復走行であれば、最適経路の検索を行う必要がないため処理の高速化に資する。
また、ステップ111においても代替施設までの最適経路とバッテリ残量との間で往復走行が可能か否かの判定を行っているが、この場合にも出発地の位置情報と、代替施設の位置情報とにもとづき直線距離を算出し、直線経路によって判定を行ってもよい。また、設定された目的地については最適経路により往復走行が可能か否かの判定を行い、代替施設については直線経路により往復走行が可能か否かの判定を行ってもよい。このような構成であれば、最適経路の検索処理を減らすことが可能となりより処理の高速化を図ることができる。
また、上述した実施形態では、目的地の設定を一つしか設定していないが、目的地の設定は複数であっても構わない。例えば、目的地を二つ設定した場合、出発地から第1の目的地を経由して、第2に目的地に行って、第2の目的地から出発地に帰還する経路となるが、このような経路で走行が可能な否かを判定すればよい。
また、ステップ102で経路探索を行っているが、実施例のように出発地から目的地までの片道の経路に基づいて往復走行が可能か否かを判定してもよい(つまり目的地から出発地までの帰路も同じ経路を利用するものとして判定する)、このような判定を行う場合、片道のみの経路探索であれば、処理の高速化を図ることも可能である。一方、経路によっては一方通行などにより、実際の経路が往路と復路で異なることがある。そのため、他の実施形態として、出発地から目的地までの経路探索を行い、帰路である目的地から出発地までの経路探索を行って往復走行が可能か否か判定してもよい(つまり往路、復路それぞれ経路探索を行って判定する)。このように往路と復路の経路をそれぞれ探索しておけば、往復走行が可能か否かのより正確な判定を行うことが可能となる。またステップ110における出発地と代替施設との間の経路についても同様である。
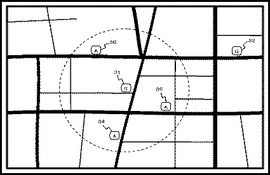
また、代替施設の検索に関しては、バッテリ残量にもとづき往復走行可能なエリアを算出し、そのエリアに含まれる代替施設が複数あれば、それらをすべて表示し、ユーザが複数の代替施設の中から選択できるようにしてもよい。具体例を図6に示している。まずバッテリ残量にもとづき往復走行可能なエリアを算出すると、そのエリアについて出発地31を中心とする円で表示する(図6では点線で示す)。そして代替施設の位置情報から、このエリアに含まれるとともに、目的地32と同じ分類情報からなる施設34、35、36をすべて表示する。そしてこの中から入力手段18を介してユーザが好きな代替施設を選択し、選択された代替施設に関する代替経路の検索を行う構成としてもよい。このようにしておけば、当初の目的地まで行けなくとも、代替施設に関してユーザの好みを十分に反映させることが可能となる。
また、上述した実施形態では、本発明の車載用ナビゲーション装置を電気自動車に適用するものとして説明した。これはガソリン自動車であればガソリンスタンドが多数設けられているため、出発した後でも目的地へ向かう途中でガソリンの給油を行うことは十分可能であるが、一方で電気自動車の場合は、充電スタンドの数がまだまだ少なく走行途中での充電は難しい反面、自宅など出発であれば通常充電設備が整っているため、確実に充電を行うことができるためである。したがって、本発明の車載用ナビゲーション装置は、待機先で燃料の補充を行う車両についても適用が可能である。例えば天然ガス自動車を用いるタクシー会社等であれば、社内に天然ガスの供給スタンド通常備えているが、天然ガスの補充先は限られている。このような場合、本発明の車載用ナビゲーション装置を天然ガス自動車に用いることも可能である。
【符号の説明】
【0010】
10 制御手段
14 現在地検出手段
15 地図記憶手段
16 経路探索手段
17 通信手段
18 入力手段
19 表示手段
20 音声報知手段
21 バッテリ残量検出手段
22 代替施設記憶手段
【特許請求の範囲】
【請求項1】
車両を走行させるための燃料の残量を検出する残量検出手段と、
目的地を設定する目的地設定手段と、
充電可能な出発地から前記目的地との間の往復走行が検出された前記燃料の残量により可能か否かを判定する判定手段と、を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
前記目的地の代替施設を記憶する代替施設記憶手段と、
設定された前記目的地との間で往復走行が不可能な場合に、前記代替施設記憶手段から代替施設を検索する代替施設検索手段と、を備え、
前記判定手段は、前記出発地と前記代替施設検索手段により検索された代替施設との間の往復走行が検出された前記燃料の残量により可能か否かを判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記出発地と前記代替施設との間の経路を探索する経路探索手段を備え、
前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項4】
前記判定手段は、前記出発地と前記代替施設との間の直線経路にもとづいて判定を行うことを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項5】
前記出発地と前記目的地との間の経路を探索する経路探索手段を備え、
前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする請求項1から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項6】
前記判定手段は、前記出発地と前記目的地との間の直線経路にもとづいて判定を行うことを特徴とする請求項1から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項7】
前記代替施設検索手段によって代替施設が見つからなかった場合に、燃料が満杯であるか否かの判定を行うことを特徴とする請求項2から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項8】
前記車載用ナビゲーション装置は、
車両の現在地を検出する現在地特定手段と、
充電可能な位置情報と、を備えており、
前記現在地特定手段により検出された車両の現在地が、前記充電可能な位置情報と一致するか否かにより、前記充電可能な出発地が特定されることを特徴とする請求項1から7のいずれか一項に記載の車載用ナビゲーション装置。
【請求項9】
前記車両を走行させるための燃料は、電気自動車を走行させるためのバッテリに充電された電力であることを特徴とする請求項1から8のいずれか一項に記載の車載用ナビゲーション装置。
【請求項1】
車両を走行させるための燃料の残量を検出する残量検出手段と、
目的地を設定する目的地設定手段と、
充電可能な出発地から前記目的地との間の往復走行が検出された前記燃料の残量により可能か否かを判定する判定手段と、を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
前記目的地の代替施設を記憶する代替施設記憶手段と、
設定された前記目的地との間で往復走行が不可能な場合に、前記代替施設記憶手段から代替施設を検索する代替施設検索手段と、を備え、
前記判定手段は、前記出発地と前記代替施設検索手段により検索された代替施設との間の往復走行が検出された前記燃料の残量により可能か否かを判定することを特徴とする請求項1に記載の車載用ナビゲーション装置。
【請求項3】
前記出発地と前記代替施設との間の経路を探索する経路探索手段を備え、
前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項4】
前記判定手段は、前記出発地と前記代替施設との間の直線経路にもとづいて判定を行うことを特徴とする請求項2に記載の車載用ナビゲーション装置。
【請求項5】
前記出発地と前記目的地との間の経路を探索する経路探索手段を備え、
前記判定手段は、前記経路探索手段により探索された経路にもとづいて判定を行うことを特徴とする請求項1から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項6】
前記判定手段は、前記出発地と前記目的地との間の直線経路にもとづいて判定を行うことを特徴とする請求項1から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項7】
前記代替施設検索手段によって代替施設が見つからなかった場合に、燃料が満杯であるか否かの判定を行うことを特徴とする請求項2から4のいずれか一項に記載の車載用ナビゲーション装置。
【請求項8】
前記車載用ナビゲーション装置は、
車両の現在地を検出する現在地特定手段と、
充電可能な位置情報と、を備えており、
前記現在地特定手段により検出された車両の現在地が、前記充電可能な位置情報と一致するか否かにより、前記充電可能な出発地が特定されることを特徴とする請求項1から7のいずれか一項に記載の車載用ナビゲーション装置。
【請求項9】
前記車両を走行させるための燃料は、電気自動車を走行させるためのバッテリに充電された電力であることを特徴とする請求項1から8のいずれか一項に記載の車載用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−29456(P2013−29456A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−166814(P2011−166814)
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]