
車載用映像記録装置

【課題】LED式信号機の灯火が消灯状態で記録されることを防止し、カメラ取り付け確認を車載モニタにて行うことができる車載用映像記録装置を提供する。
【解決手段】車載用映像記録装置において、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択し、選択された映像処理方式に基づいて撮影を行い、映像情報を記録する。
【解決手段】車載用映像記録装置において、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択し、選択された映像処理方式に基づいて撮影を行い、映像情報を記録する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両等に搭載されたカメラによって走行中の車両の前方を記録する車載用映像記録装置に関する。
【背景技術】
【0002】
従来、自動車に設置したビデオカメラによる撮影情報を順次循環して(以下「エンドレス」という)記憶しておき、車両の衝突など事故発生時に記憶した撮影情報を他の記録媒体に記録し事故前後の映像を得て事故原因を検証する車載用映像記録装置、いわゆるドライブレコーダが提案されている(参考文献1)。
【0003】
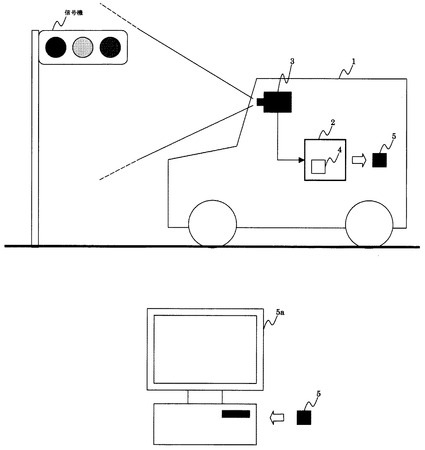
図1に示すように、車両1内にドライブレコーダ2は設置され、車両1の前方を撮影するビデオカメラ3と接続されている。ビデオカメラ3の撮影情報をドライブレコーダ2内の半導体記憶装置にエンドレスに記憶を行う。事故等の発生により車両1へ衝撃が加わると、重力加速度検出センサ4が検知し、ドライブレコーダ2において事故発生と判定され、半導体記憶装置に記憶された撮影情報を記録カード5へ記録する。これにより、事故前後の数秒間に渡る車両1の前方の映像がカード内に記録される。
【0004】
記録カード5に記録された撮影情報はパーソナルコンピュータ等の再生装置5aにより映像として再生され、事故原因の究明等に役立てることが出来る。特に、車両用交通信号灯器(以下「信号機」といい、車両用のほか歩行者用、自転車用を含む)のある交差点で事故が発生した場合には、記録された映像に事故発生時の信号機の灯火が映っていることがあり、交通状況の把握や当事者責任の判定に極めて有効となる。
【0005】
ところで、平成6年から信号機の灯火部にLED(Light-Emitting Diode;発光ダイオード)が用いられるようになった。LED式信号機は、商用電源を全波整流した電源を用いているため、印加される電圧は商用電源の2倍の周波数、すなわち東日本では100Hz、西日本では120Hzで変化している。また、LEDは点灯に一定以上の電圧印加を必要とする。このため、LED式信号機では電源電圧の約1/2以上の電圧印加で点灯するよう構成されている。したがって、LED式信号機は従来の電球式信号機が連続的に発光しているのと異なり、商用電源の2倍の周波数で明滅を繰り返して発光している。
【0006】
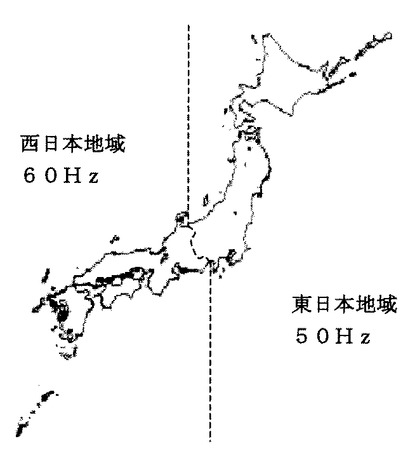
なお、商用電源周波数の東西の区分は、一般に静岡県の富士川と新潟県の糸魚川を結ぶ線が境界とされ、東側が50Hz、西側が60Hzとされる。実際には電力会社毎に供給約款で標準周波数を定めており、山梨県と新潟県(一部例外あり)は50Hz、長野県(一部例外あり)は60Hzとなっている(図2参照)。
【0007】
また、ドライブレコーダ2へ映像信号を送るビデオカメラ3は、NTSC(National Television System Committee)規格による映像信号の周波数(59.94Hz)又はPAL(Phase Alternating Line)規格による映像信号の周波数(50Hz)で映像を取り込み、取り込んだ映像に対応したビデオ信号を出力する。さらに、一般的にはTVモニタや液晶モニタ等もNTSC又はPAL規格による映像信号の周波数で、映像を表示するよう構成されている。
【0008】
このような事情において、ビデオカメラでLED式信号機を撮影した場合、信号機の明滅周期(120Hz又は100Hz)とビデオカメラの映像取り込みタイミング(59.94Hz又は50Hz)との関係から、取り込んだ映像から信号機の表示色が判別できない場合が生じている。以下その理由について説明する。
【0009】
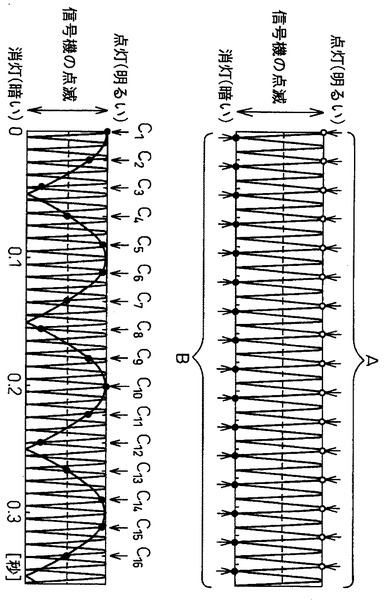
図3は、LED式信号機の明滅と映像取り込みタイミングとの関係を示す図である。
【0010】
図3(a)は、100Hzで明滅している信号機の灯火を50Hzのタイミングで撮影して取り込んだ場合を示す。図中、「A」は、灯火が最も明るいタイミングで映像を取り込んだ場合であり、「B」は、灯火が最も暗いタイミングで映像を取り込んだ場合である。すなわち、「A」の場合には、取り込んだ全ての映像において灯火の表示色を判別できるが、「B」の場合には、取り込んだ全ての映像において灯火の表示色を判別することができない。このように、灯火の明滅周波数と映像の取り込みタイミングの整数倍とが一致すると、映像を取り込んでも、「B」に示すように信号機の灯火の表示色を判別することができない場合が生じる。
【0011】
図3(b)は100Hzで明滅している灯火を45Hzのタイミングで撮影して取り込んだ場合を示す。C1〜C16は映像の取り込みのタイミングを示している。この場合、灯火の明滅周波数と映像取り込みタイミングの整数倍とが一致しないので、取り込まれた映像中の灯火は周波数fb(Hz)で明滅を繰り返す。例えば、C1、C2、C5、C6、C9、C10、C11、C14、C15では取り込まれた映像中で、信号機の灯火の表示色を判別することができる。このように、灯火の明滅周波数と映像の取り込みタイミングの整数倍とが一致しないと、映像の取り込みタイミングのいずれかで信号機の灯火の表示色を判別することができる。
【0012】
灯火の明滅周波数fs(Hz)と取り込まれた映像中の灯火の明滅周波数fb(Hz)は、以下の式(1)に示す関係となる。ただし、映像の取り込み周波数をfr(Hz)とし、式中のnはfr×nをfsに最も近い値とする整数である。
【0013】
fb=|fs−fr×n| ・・・(1)
【0014】
例えば、図3(b)に示す状態を式(1)に当てはめると、fb=(100−45×2)=10(Hz)となり、取り込まれた映像中の灯火は、0.1秒周期で明滅を繰り返す。
【0015】
図4(a)は、東日本と西日本においてNTSC規格またはPAL規格を用いてLED式信号機を撮影した場合に、再生映像における信号機の灯火の明滅周期(秒)を示した図である。東日本においてPAL規格を用いた場合は、灯火の明滅周期は0.00秒となる。すなわち、この場合のみ灯火の明滅は生じない。図4(b)は、東日本と西日本においてNTSC規格またはPAL規格を用いた場合に、灯火の明滅周期と撮影タイミングとの関係を示した図である。東日本においてPAL規格を用いた場合は、灯火の明滅は生じないため、灯火の明滅周期と撮影タイミングは一致する。すなわち、東日本でPAL規格を用いると再生映像において、灯火が全消灯して映る場合が生じ、この場合に映像中で信号機の表示を判別できないこととなる。
【0016】
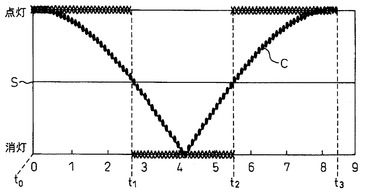
図5は、120Hzで明滅を繰り返す西日本のLED式信号機をNTSC規格の映像信号の周波数(59.94Hz)で撮影した場合を示したものである。図において、縦軸は信号機のLEDに印加される電圧を示し、横軸は時間(秒)を示す。また、電源電圧の1/2に相当する閾値電圧S以上の電圧が印加すれば、LEDが点灯して信号機の表示色は判別可能となり、閾値電圧S未満の電圧が印加した場合には、LEDが充分に点灯せず信号機の表示色は判別不能となるものとする。さらに、曲線Cは映像の取り込みタイミングでの信号機のLEDに印加される電圧状態を示したものである。
【0017】
図5の場合、式(1)より、取り込まれた映像中の灯火の明滅周波数は0.12(Hz)、明滅周期は約8.33秒となる。すなわち、曲線Cは約8.33秒周期で点灯と消灯を繰り返すこととなる。図2において、時刻t0から時刻t1までの間、時刻t2から時刻t3までの間は、閾値電圧S以上の電圧が印加されるので、LEDが点灯して信号機の表示色は判別可能となる。しかしながら、図4において時刻t1から時刻t2までの間は、閾値電圧S未満の電圧しか印加されていないので、LEDが充分に点灯せず信号機の表示色は判別不能となる。すなわち、時刻t1から時刻t2までの期間(明滅周期の約1/3の期間)の約2.78秒は継続して信号機の表示色を判別することができない。特に、同期間が信号機の黄色の点灯時間(約2秒)に重複した場合には黄色の灯火状態を判別できない。この場合、例えば車両が交差点に進入したときの映像において、信号機が黄色であったか赤色であったか判別できず、交差点状況の検証ができないこととなる。
【0018】
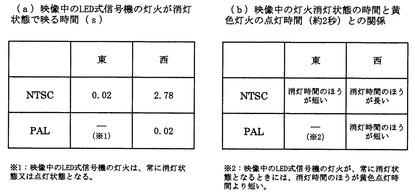
図6(a)は、映像中のLED式信号機の灯火が消灯状態で映る時間(秒)を示した図である。図中の各数値は、図4(a)で示した点滅周期を1/3とした時間が該当する。図6(b)は、映像中の灯火消灯状態の時間と黄色灯火の点灯時間(約2秒)との関係を示した図である。西日本においてNTSC規格を用いた場合は、映像中の灯火消灯状態の時間のほうが、黄色灯火の点灯時間より長い。すなわち、黄色灯火が消灯状態のみ撮影される場合が生じ、この場合に映像中で信号機の表示を判別できないこととなる。
【0019】
なお、上記の例ではLED式信号機の点灯色のうち最も点灯時間が短い黄色の灯火を判別できない例として示した。しかし、歩行者又は自転車専用信号機のように黄色灯火のないものについては、それぞれ最短の点灯時間の灯火について判別できないこととなる。すなわち、歩行者等専用信号機の場合は、青色(緑色)灯火の点滅時の灯火(約0.5秒から1秒)が該当する。
【0020】
このように、ドライブレコーダにおいてビデオカメラでLED式信号機を撮影した場合、信号機の灯火の明滅周期と映像取り込みタイミングとの関係で、取り込んだ映像において信号機の表示色が判別できない場合が生じている。この問題は、ビデオカメラでの撮影がNTSC規格(59.94Hz)に基づく場合は西日本(120Hz)で発生し、PAL規格(50Hz)に基づく場合は東日本(100Hz)で発生している。
【0021】
そこで、対応策として撮影コマ数の調整及びカメラのシャッタースピードの調整が提案されている(参考文献2)。
【0022】
撮影コマ数の調整は、ドライブレコーダの撮影コマ数を商用電源周波数の約数とならないようにするものである。例えば、毎秒30.5コマに設定することで、LED信号機の灯火が瞬きやちらつきのある映像として撮影されるが、完全消灯とはならず灯火状況が判別できる。また、シャッタースピードの調整は、LED素子の1点滅周期より長くなるようシャッタースピードを調整するものである。例えば、LEDの点滅周期が100Hzの場合は1/100秒以上、120Hzの場合は1/120秒以上に設定することで灯火状況が判別できる。ただし、シャッタースピードの調整は、昼間映像では被写体の動きにぶれが生じてしまい事故等の画像検証が困難となる場合がある。
【0023】
【特許文献1】特開昭63−16785号公報
【特許文献2】『ドライブレコーダ映像に対するLED信号機の影響』自動車研究 第28巻 第7号(2006年7月)
【発明の開示】
【発明が解決しようとする課題】
【0024】
以上のように、商用電源周波数の東西の区分は図2の通りであるため、東西どちらかの地域のみで走行する場合には、東日本でNTSC規格、西日本でPAL規格を用いて撮影を行えばよい。しかし、例えば東日本から西日本へ走行中に商用電源の周波数帯域が変わった場合には、前述のように灯火が消灯して記録される問題が生じる。
【0025】
また、カメラの撮影コマ数を調整することで、灯火状況が判別できるものの、従来の撮影規格を用いないことにより、予め車両に備え付けられたモニタにて映像を直ちに表示することが出来ない。すなわち、一般的な車載用モニタは規格化されたビデオ信号のみ表示するよう構成されているためである。この場合、カメラ取付けの際にカメラ映像の確認に別途規格化されていない専用のモニタを用意する必要が生じ、取付け作業における不都合が生じる。
【0026】
本発明は、上記問題に鑑み発明されたものであって、その目的は、LED式信号機の灯火が消灯して記録されることを防止し、撮影地域の商用電源周波数に関わらずLED式信号機の映像を含む事故映像等の記録を行うことである。また、カメラ取付けに際し、別途モニタを用意することなく車載モニタにて映像確認できる車載用映像記録装置を提供することである。
【課題を解決するための手段】
【0027】
上記目的を達成するために、本発明(1)の車載用映像記録装置は、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する方式選択手段と、前記選択された映像処理方式に基づく映像情報を記録する記録手段とを備えることを特徴とする。
【0028】
本発明(1)によれば、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択するよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0029】
また、本発明(2)の車載用映像記録装置は、前記選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うことを特徴とする。
【0030】
本発明(2)によれば、複数の規格化された映像処理方式を備え、選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の全表示色について消灯状態のみの撮影とはならずに、各表示色の点灯状態を撮影することができる。すなわち、最も点灯時間の短い黄色の点灯状態をいずれかの撮影タイミングで撮影できるので、黄色より点灯時間の長い赤色および青色(緑色)の点灯状態も撮影することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0031】
また、本発明(3)の車載用映像記録装置は、車両の位置を検出する位置検出手段と、前記検出した位置が第一または第二の商用電源地域のいずれかを検出する地域検出手段と、
前記検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択する方式選択手段と、前記選択された映像処理方式に基づく映像情報を記録する記録手段とを備えることを特徴とする。
【0032】
本発明(3)によれば、車両の位置が第一または第二の商用電源地域のいずれかを検出し、検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択するよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0033】
また、本発明(4)の車載用映像記録方法は、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する工程と、前記選択された映像処理方式に基づく映像情報を記録する工程を備えたことを特徴とする。
【0034】
本発明(4)によれば、複数の規格化された映像処理方式を備え、車両の位置に基づいて映像処理方式を選択する工程を備えるよう構成した。このため、車両の置かれた位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【発明を実施するための最良の形態】
【0035】
以下、本発明の実施の形態を図面を参照して詳細に説明する。
【0036】
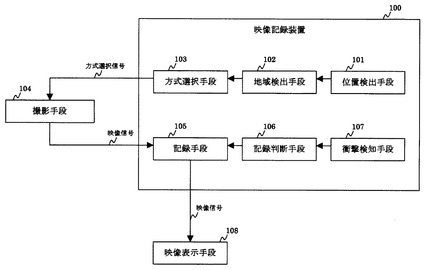
図7は本発明の映像記録装置の機能的構成を示すブロック図である。
映像記録装置100は、位置検出手段101、地域検出手段102、方式選択手段103、記録手段105、記録判断手段106及び衝撃検知手段107とを備え、車両に搭載されている。なお、映像記録装置100は撮影手段104および映像表示手段108と一体に構成してもよい。
【0037】
位置検出手段101は、車両の位置を検出し地域検出手段102へ位置情報を送信する。地域検出手段102は、位置検出手段101から車両の位置情報を受信した場合に、車両の位置と予め記憶している地域情報に基づいて、車両が置かれた地域の商用電源周波数を検出する。
【0038】
方式選択手段103は、検出された商用電源周波数に応じた撮影および映像信号の生成が行われるように映像処理の方式を選択し、方式選択信号を撮影手段104へ出力する。なお、映像処理とは撮影およびビデオ信号等の映像信号の生成をいう。方式選択手段103は、例えば、車両の置かれた地域の商用電源周波数が50Hzの場合には、映像処理方式がNTSC規格に基づく方式を選択し、かかる方式で映像処理が行われるように方式選択信号を出力する。また、車両の置かれた地域の商用電源周波数が60Hzの場合には、映像処理方式がPAL規格に基づく方式を選択し、かかる方式で映像処理が行われるように方式選択信号を出力する。
【0039】
撮影手段104は、複数の映像処理方式を備え、方式選択手段103から送信された方式選択信号に応じた映像処理方式に基づいて車両前方の撮影および映像信号の生成を行い、生成した映像信号を記録手段105へ送信する。
【0040】
記録手段105は、受信した映像信号を常時記憶しておき、記録判断手段106からの信号に基づいて記憶した映像信号を所定時間だけ別途記録する。この際、記録手段105は映像信号を画像ファイルとして記録することもできる。
【0041】
記録判断手段106は、衝撃検知手段107が検知した衝撃の大きさが車両事故等に相当する衝撃と判断した場合に記録手段105へ記録制御を実行させる信号を送信する。
【0042】
映像表示手段108は、記録手段105に記録された映像信号を受信し、映像として表示する。これにより、映像記録装置のユーザーは車両前方等の状況を映像にて検証することができる。
【0043】
以上の機能により、本発明は車両の置かれた地域に適した映像処理方式を用いて映像を記録することができる。すなわち、信号機を撮影した場合に、かかる信号機がLED式であっても、再生映像において灯火の消灯状態のみが表示されることを防止できる。また、カメラ取付けの際に車載モニタにて直ちに映像確認することができる。
【0044】
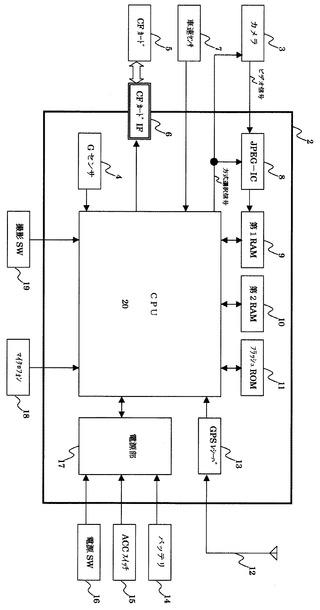
図8は、本願発明のドライブレコーダ2の電気的構成を示すブロック図である。
なお、ドライブレコーダ2は映像記録専用の装置として構成することもできるが、車載用ナビゲーション装置やビデオカメラと一体的に構成してもよい。
【0045】
カメラ3は、車両1の前方を撮影してアナログのビデオ信号を出力するよう制御され、CCDイメージセンサ(Charge Coupled Device Image Sensor)を備えて構成される。かかる撮影制御およびビデオ信号は規格化されており、本発明においてはNTSC規格またはPAL規格に準拠する。したがって、カメラ3は両方式のビデオ信号を出力できるように構成される。すなわち、NTSC規格およびPAL規格で撮影した映像情報を処理する各々のプログラムを備え、ドライブレコーダ2から送信される映像処理方式を選択する方式選択信号に基づいて、各プログラムを選択して撮影およびビデオ信号生成の制御を行う。なお、カメラ3は、本発明における撮影手段に相当する。
【0046】
Gセンサ(Gravity Accelerative Sensor)4は、車両1に加わる重力加速度を検出する。重力加速度を受けると電流を発生する半導体から構成され、車両の前後方向および左右方向の重力加速度の大きさを検出して出力する。なお、Gセンサ4は、本発明における衝撃検知手段に相当する。
【0047】
CFカード(Compact Flash Card)5は、ドライブレコーダ2から取り外し可能な記憶媒体であり、不揮発性半導体メモリであるフラッシュメモリから構成される。カメラ3により撮影された映像やマイクロフォン18により集音された音声の付加情報として車両1の位置、車両速度(以下「車速」)、Gセンサ3から得た重力加速度、時刻を記録する。本実施の形態では、例えば1秒間に10枚の静止映像がCFカード5に記録され、1回の記録条件の成立つき最大30秒間で300枚の静止映像がCFカード5に記録可能に構成されている。記録された映像等は、パーソナルコンピュータ等の再生装置にて表示することにより、ドライブレコーダ2のユーザーは車両の事故状況や運転状況を検証することができる。なお、上記のパーソナルコンピュータ等の再生装置は、本発明における映像表示手段に相当する。
【0048】
なお、記録条件は、例えばGセンサ8が検出する車両1へ加わる衝撃の大きさが所定値を越えるか否かが条件として設定される。すなわち重力加速度が1.0Gを100ミリ秒続けて超過した場合であり、車両1の衝突事故の発生と認識できる場合である。また、車速センサ9が検出する車両1の速度変化の大きさを条件として設定してもよい。すなわち、車両1の急減速または急加速を検出した場合には、事故の発生または事故の急迫と認識できるためである。
【0049】
また、本実施の形態では取り外し可能な記憶媒体としてCFカードを用いているが、必ずしもこれに限定されるものではなく、他の取り外し可能なメモリカード、ハードディスク等を利用することもできる。さらに、CFカード5の替わりに、ドライブレコーダ2にハードディスクを内蔵して用いることも可能であり、この場合にはドライブレコーダ2に送信回路を設け無線通信によりハードディスクに記録した映像データを再生装置へ送信するよう構成すればよい。
【0050】
CFカードインターフェース(以下「CFカードIF」)6は、ドライブレコーダ2に設けられたCFカードの差込口、いわゆるスロット部を構成する。上述のCFカード5はCFカードIF6に差し込まれた状態において、ドライブレコーダ2からの映像情報等が記録されることとなる。
【0051】
車速センサ7は、車両1の車輪軸に設けられたローターの回転をパルス信号として出力し、磁気センサまたは光センサにより構成されている。なお、CPU20は車速センサ7から受信するパルス信号から単位時間当たりの車輪回転数を算出することで車両1の車両速度を算出している。
【0052】
JPEG−IC(JPEG:Joint Photographic coding Experts Group、IC:Integrated Circuit)8は、NTSC規格およびPAL規格の映像処理回路を備え、CPU20から入力される映像処理方式を選択する方式選択信号に応じて、一方の映像処理回路を選択する。選択された映像処理回路を用いてカメラ3から入力されるビデオ信号をデジタル信号に変換し、JPEG形式のデータに変換する。変換したデータを後述の第1RAM9へ出力する。
【0053】
また、JPEG−IC8は、NTSC規格のビデオ信号を受信して変換処理を行う場合に、毎秒30ファイルを第1RAM9へ書込み、1ファイル毎に上書き処理を行う。これは、第1RAM9の容量を少なく設定しているためであり、またJPEG−IC8はアドレスを指定してデータを出力する機能を有さないため、第1RAM9においては1ファイル毎に上書き処理が行われるためである。なお、PAL規格で処理を行う場合には、毎秒25ファイルで同様の処理を行うこととなる。
【0054】
第1RAM(Random Access Memory)9は、JPEG−IC8によってJPEG形式に変換された映像データを一時的に記憶する。なお、第1RAM9はCPU20内のDMA(Direct Memory Access)回路と接続されており、入力された映像のうち3枚に1枚がDMAの機能により第2RAM10へ転送され、エンドレスに記憶される。つまり、NTSC規格に基づいて撮影された映像の場合、約100ミリ秒毎に1枚の映像が第2RAM10に記憶されることとなるが、車両1の走行状態等を検証するうえで支障がなく、CFカード5の容量を節約することができる。この場合、数十秒間の映像を記憶するのに、CFカード5の容量は128〜256メガバイト程度で足りる。
【0055】
第2RAM10は、JPEG−IC8によりJPEG形式に変換された映像情報、マイクロフォン18により集音された音声情報、および運行情報としてGPSレシーバ13によって受信した電波信号に基づいて測定される車両1の位置、時刻、車速センサ7により検出される速度、Gセンサ4によって検出される重力加速度をエンドレスに記憶する。
【0056】
なお、第1および第2RAMはSDRAM(Synchronous Dynamic Random Access Memory)を用いることが望ましい。SDRAMはCPUのクロックに同期して動作するよう設計されているため、入出力の待ち時間が短く、従来のSDRAM(Dynamic Random Access Memory)に比較してアクセスを高速に行うことができ、大容量の映像データを高速に処理する制御に適しているためである。
【0057】
フラッシュROM(Flash Read Only Memory)11は、ドライブレコーダ2を構成するハードウェア資源を統括的に制御するための制御プログラムを記憶する。また、地図情報を記憶し、図2に示すような東日本と西日本を区別する地域情報をも記憶している。具体的には、商用電源周波数が50Hzと60Hzに分かれる境界線を緯度・経度情報として記憶する。GPSレシーバ13で受信される緯度・経度による車両位置が境界線より西であれば西日本と判断することができる。または、緯度・経度に対応する地名を検索し、かかる地名において使用される商用電源周波数を検索できる地図情報をフラッシュROM11に記憶してもよい。
【0058】
GPS(Global Positioning System)アンテナ12は、図示しない複数のGPS衛星へ電波を発信し、反射された電波を受信するよう構成されている。受信した電波には自車両の緯度・経度からなる位置情報および時刻情報が含まれる。
【0059】
GPSレシーバ13は、GPSアンテナ12を介して、GPS衛星からの電波信号を受信し、受信した電波信号をCPU20に送信する。CPU20はGPSレシーバ13から受信した電波信号に基づいて、自車両の緯度・経度からなる位置情報および時刻情報を測定する。
【0060】
バッテリ14は、車両内に備えられ、ドライブレコーダ2の本体に電源を供給する。車両に装備可能で12Vの起電力を発生できるものであればよい。
【0061】
アクセサリスイッチ(以下「ACCスイッチ」)15は、車両1に備えられたエンジン始動用のキーシリンダと電気的に一体に構成されている。ユーザーのキー操作によりスイッチがオンとされるとオン信号をドライブレコーダ2へ送信する。ドライブレコーダ2はACCスイッチ15のオン信号を受信することにより、制御を開始する。
【0062】
電源スイッチ(以下「電源SW」)16は、ユーザーによりスイッチ操作がなされると、オン信号をドライブレコーダ2へ送信する。ACCスイッチ15をオンさせずにドライブレコーダ2を動作させたい場合に用いることができる。
【0063】
電源部17は、CPU20に接続されACCスイッチ15からのオン信号を受信することで、バッテリ14からの電源をCPU20およびドライブレコーダ2の各部へ供給する。また、電源SW16が操作されたことを検知すると、ACCスイッチ15の状態に関わらず電源の供給を開始する。さらに電源部17はACCスイッチ15または電源SW16のオフを検知することにより、終了信号をCPU20へ送信する。終了信号を受信したCPU20は、制御の終了処理として電源部17にオフ信号を送信する。これにより、電源部17が電源の供給を停止する。
【0064】
マイクロフォン18は、CPU20と電気的に接続され、車両1の車室内または車外の音声を集音してCPU20へ送信するよう構成されている。道路上の騒音を不必要に集音しないように、マイクロフォンの正面の感度が高い単一指向性マイクロフォンを用いるとよい。
【0065】
撮影スイッチ(以下「撮影SW」)19は、ユーザーにより操作されることにより、電気的に接続されたCPU20へ信号を送信する。これにより、CPU20は第2RAM10に記憶された映像情報等をCFカード5に記録させるよう制御する。すなわち、撮影SW19の操作は上述の記録条件の成立として作用する。なお、撮影SW19が操作された瞬間の映像情報のみをCFカード5に記録するようにしてもよい。
【0066】
CPU(Central Processing Unit)20は、ドライブレコーダ2の制御装置として動作し、マイクロコンピュータ等により構成される。CPU20はGPSレシーバ13から検出した車両の位置情報、時刻情報、車速センサ7から検出した車速、およびGセンサ4から検出した重力加速度からなる運行情報、さらに第1RAM9に記憶された映像情報およびマイクロフォン18の音声情報を定期的に第2RAM10にエンドレスに記憶する。そして記録条件の成立を検出すると、記録条件成立前15秒間、および成立後15秒間の合計30秒間の運行、映像および音声情報を第2RAM10からCFカード5に転送して記録する。
【0067】
また、CPU20は、GPSレシーバ13から検出した位置情報に基づき、カメラ3およびJPEG−IC8の映像処理方式がLED式信号機の明滅の影響を受けない規格化された映像処理方式となるよう制御する。すなわち、車両位置が商用電源周波数50Hzである東日本地区であればNTSC規格の映像処理方式を選択する方式選択信号をカメラ3とJPEG−IC8に出力する。一方、車両位置が商用電源周波数60Hzである西日本地区であればPAL規格の映像処理方式を選択する方式選択信号をカメラ3とJPEG−IC8に出力する。
【0068】
なお、CPU20は、本発明における位置検出手段、地域検出手段、方式選択手段、記録手段および記録判断手段に相当する。ただし、位置検出手段にGPSレシーバ13、またはGPSレシーバ13とGPSアンテナ12の組合せを相当させてもよい。この場合には、位置検出手段をドライブレコーダ2の外部に設けることも可能である。さらに、GPSアンテナ12およびGPSレシーバ13を用いることなく、ユーザーの手動操作によりCPU20へ車両位置の設定を行ってもよい。この場合には、ドライブレコーダ2の外部にスイッチを設け、ユーザーのスイッチ操作により東日本または西日本を表す信号をCPU20へ入力することにより、車両位置の設定を行うことができる。さらに、記録手段に第1RAM9または第2RAM10、または両者の組合せを相当させてもよい。この場合には、各RAMをドライブレコーダ2の外部に設けることもできる。
【0069】
ここで、東日本においてNTSC規格、西日本においてPAL規格を用いて撮影した場合における、LED式信号機の明滅の影響を受けない例について以下に説明する。東日本においてNTSC規格に基づく映像処理方式で撮影を行った場合、映像中のLED式信号機の明滅周波数fbは前述の(1)式をもとに計算すると19.88Hz(周期約0.05秒)となるため、映像中の消灯時間は明滅周期の1/3とすると約0.02秒となる。また、西日本においてPAL規格に基づく映像処理方式で撮影を行なった場合も同様に計算すると、明滅周波数fbは20.00Hz、映像中の消灯時間は約0.02秒となる。
【0070】
このように、東日本、西日本のどちらにおいても映像中の消灯時間は約0.02秒となる。このため、映像中の消灯時間は、LED式信号機の点灯時間の最も短い黄色表示の点灯時間の約2秒より充分に短い時間となる。したがって、LED式信号機の明滅の影響を受けることなく信号機の黄色点灯状態を確認することができる。しかも、NTSC規格およびPAL規格の映像処理方式を用いるため、カメラ取付けの際に別途モニタを用意することなく、従来から使用される規格化されたビデオ信号を表示する車載モニタにて映像確認を行うことができる。なお、映像中の消灯時間が撮影地域におけるLED式信号機の黄色点灯時間以下になる映像処理方式であれば他の方式を採用してもよい。
【0071】
次に、CPU20の動作について図9を参照して説明する。
電源部17はACCスイッチ15または電源SW16からのオン信号を受信するとバッテリ14からの電源をCPU20へ供給する。CPU20はこの電源の供給を受けると起動処理を開始する(ステップ100)。起動処理はフラッシュROM11内の制御プログラムを読み出して実行することにより、演算処理を行う準備がなされる。また、フラッシュROM11内の制御用のデータを読み出し、第2RAM10内に初期値として設定する。この際、東日本と西日本とを判別可能な地図情報の読み出しも行う。
【0072】
起動処理が完了するとCPU20が接続されるJPEG−IC8、Gセンサ4等のドライブレコーダ2を構成する各部へ電源を供給する(ステップ101)。
【0073】
次に、車両1の位置および時刻をGPSアンテナ12からGPSレシーバ13を介して検出する(ステップ102)。
【0074】
次に、予め読み出している東日本と西日本とを判別可能な地図情報、すなわち緯度・経度情報および車両位置に基づいて、車両の置かれた地域が東日本か西日本かを判断する(ステップ103)。なお、ステップ102およびステップ103の工程は、本発明における車両の位置を検出する工程に相当する。
【0075】
東日本であると判断される場合はステップ104に移行する。ステップ104では前回も東日本か否かを判断する。なお、「前回」とはCPU20の起動中における前回の場合であり、起動後最初の処理ルーチンでの処理においては前回データがない。この場合、ステップ104での「前回も東日本か」の判断は否となる。
【0076】
ステップ104において否と判定した場合、つまり東日本でない(西日本である)と判断される場合は、東日本におけるCPU20起動後の初回判断時であるか、または走行地点が西日本から東日本へ変化した直後であることを示すため、東日本におけるLED式信号機の映像の灯火消灯時間が短くなるよう、NTSC規格を選択する方式選択信号をカメラ3およびJPEG−IC8へ出力する(ステップ105)。カメラ3およびJPEG−IC8はCPU20からの方式選択信号を受信すると、以後NTSC方式に基づいて制御を行う。
【0077】
ステップ104において、東日本であると判断される場合は直ちにステップ108に移行する。つまり、前回東日本と判断された時点でカメラ3およびJPEG−IC8の映像処理にNTSC規格を選択しているため、今回の処理で再び同規格を選択する必要がないためである。
【0078】
一方、ステップ103において、西日本であると判断される場合はステップ106に移行する。ステップ106では前回も西日本か否かを判断する。
【0079】
ステップ106において否と判定した場合、つまり西日本でない(東日本である)と判断される場合は、西日本におけるCPU20起動後の初回判断時であるか、または走行地点が東日本から西日本へ変化した直後であることを示すため、西日本におけるLED信号機の映像の灯火消灯時間が短くなるようPAL規格を選択する方式選択信号をカメラ3およびJPEG−IC8へ出力する(ステップ107)。カメラ3およびJPEG−IC8はCPU20からの方式選択信号を受信すると、以後PAL規格で制御を行う。
【0080】
ステップ106において、西日本であると判断される場合は直ちにステップ108に移行する。つまり、前回西日本と判断された時点でカメラ3およびJPEG−IC8の映像処理にPAL規格を選択しているため、今回の処理で再び同規格を選択する必要がないためである。
【0081】
なお、ステップ103からステップ107までの工程は、本発明における映像処理方式を選択する工程に相当する。
【0082】
ステップ108では、車両の位置、時刻、車速、重力加速度からなる運行情報を第2RAMへ記憶させる。
【0083】
ステップ109では、JPEG−IC8から出力されるJPEGファイル形式による映像情報をステップ108で記憶した運行情報と対応させて第2RAM10へ記憶させる。
【0084】
ステップ110では、ステップ108で記憶した運行情報と対応させてマイクロフォン18の集音する音声情報を第2RAM10へ記憶させる。
【0085】
ステップ111では映像等の記録条件が成立したか否かが判断される。記録条件が成立する場合は、車両1が衝突に相当するような衝撃等を受けた場合に、Gセンサ4からの重力加速度に基づいてCPU20が衝突と判断した場合である。また、撮影SW19が操作された場合も含まれる。記録条件が成立したと判断するとステップ112へ移行する。なお、記録条件が成立するとCPU20は記録条件成立フラグをONとする。フラグがONとなると後のステップ114でフラグがOFFとされるまでは、ステップ111における条件判断は常に成立すると判断され、ステップ112への移行制御が行われる。
【0086】
ステップ112では第2RAM10に記憶された映像、音声情報と車両の位置、時刻、速度、重力加速度からなる運行情報をCFカード5へ記録する。なお、本フローにおいてステップ112の制御を初めて実行する場合には、第2RAM10に記憶されている記録条件の成立前15秒間の各情報をCFカード5へ記録する。2回目以降に実行する場合には、直前のステップ108、109、110で記憶された各情報をCFカード5へ記録する。なお、ステップ112の工程は、本発明の映像情報を記録する工程に相当する。ただし、ステップ109を本発明の映像情報を記録する工程に相当させてもよいし、ステップ109およびステップ112の両者を相当させてもよい。
【0087】
ステップ113では、記録条件成立から15秒が経過したか否か判断される。15秒が経過していないと判断される場合にはステップ108へ戻り、再び各情報の第2RAM10への記憶とCFカード5への記録を繰り返す。これにより、記録条件の成立前15秒間および成立後15秒間の合計30秒間に渡る各情報がCFカード5へ記録される。一方、記録条件成立から15秒経過したと判断された場合にはステップ114へ移行する。
【0088】
ステップ114では、ステップ111においてONとした記録条件成立フラグをOFFとする。これにより、新たに記録条件が成立しなければ、次回のステップ111における判断は否となり、画像情報等をCFカード5へ記録する制御は実行されない。
【0089】
なお、ステップ111で記録条件が成立していないと判断した場合は、映像等のCFカード5への記録を行わずステップ115へ移行する。
【0090】
ステップ115では電源部17からの終了信号を受信したか否かが判定される。受信したと判断される場合には、ステップ116に移行する。受信したと判断されない場合にはステップ102に戻り、車両1の位置情報を再び取得して前述の制御を繰り返し実行する。つまり、ACCスイッチ15がオンである間は、車両1が移動している場合があり、東日本から西日本へまたは西日本から東日本へ境界を越えて移動する場合がある。このため、ACCスイッチ15のオンの間は所定の間隔で位置情報を取得して、かかる境界を超えたと判断された場合に適切な映像処理方式を選択するよう方式選択信号を送信する必要がある。
【0091】
ステップ116では、CPU20の終了処理を行う。すなわち電源部17にオフ信号を出力することにより、電源部17からの電源の供給が遮断される。終了処理が実行されると本フローチャートは終了する。
【0092】
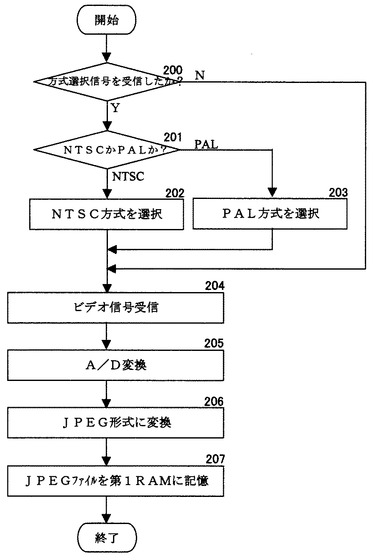
次に、JPEG−IC8の制御を図10を参照して説明する。
JPEG−IC8は電源部17より電源の供給を受けて制御を開始する。制御が開始するとCPU20から映像処理方式を選択する方式選択信号を受信したか否か判断する(ステップ200)。受信した場合はステップ201へ移行する。受信していないと判断される場合には続く制御を行わずステップ204に移行する。
【0093】
ステップ201では、CPU20から受信した方式選択信号がNTSC方式であるかPAL方式であるかを判断する。NTSC方式と判断される場合にはステップ202へ移行し、PAL方式と判断される場合にはステップ203に移行する。
【0094】
ステップ202において、JPEG−IC8は映像データの処理方式にNTSC方式を選択して設定する。
【0095】
次に、カメラ2で撮影された映像情報をビデオ信号として受信する(ステップ204)。ビデオ信号を受信すると、A/D変換を行い、(ステップ205)、ビデオ信号をJPEG形式に変換を行う(ステップ206)。
【0096】
ステップ207において、JPEG形式に変換したデータを第1RAM9に記憶させる。記憶制御が完了すると本制御を終了する。
【0097】
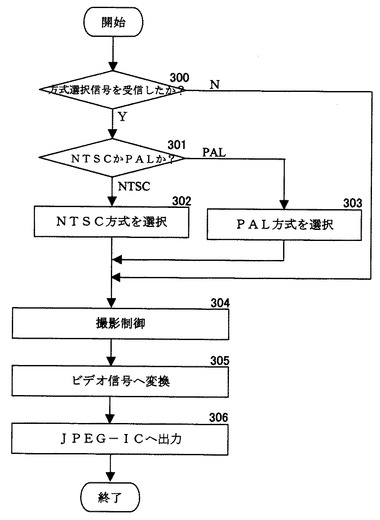
次に、カメラ3の制御を図11を参照して説明する。
カメラ3は電源部17より電源の供給を受けて制御を開始する。制御が開始するとCPU20から映像処理方式を選択する方式選択信号を受信したか否か判断する(ステップ300)。受信した場合はステップ301へ移行する。受信していないと判断される場合には続く制御を行わずステップ304に移行する。
【0098】
ステップ301では、CPU20から受信した方式選択信号がNTSC方式であるかPAL方式であるかを判断する。NTSC方式と判断される場合にはステップ302へ移行し、PAL方式と判断される場合にはステップ303に移行する。
【0099】
ステップ302において、カメラ3は撮影制御およびビデオ信号生成の方式にNTSC方式を選択して設定する。また、ステップ303に移行した場合にはPAL方式を選択して撮影制御等を行う。
【0100】
なお、カメラ3は映像処理方式を選択した場合に、すなわちステップ302またはステップ303の後に、映像処理方式を選択した旨の信号をJPEG−IC8へ送信するよう構成してもよい。この場合、JPEG−IC8は、当該信号を受信すると、カメラ3から送信されるNTSC方式又はPAL方式のビデオ信号に同期してJPEGファイルへの変換処理が行えるように自らの処理方式を選択して設定する。これにより、CPU20から直接に方式選択信号を受信する構成を省略することができる。
【0101】
ステップ304では、ステップ302または303で選択された方式で撮影制御をおこない、撮影した映像をビデオ信号に変換する(ステップ305)。そしてビデオ信号をJPEG−IC8へ出力して(ステップ306)、本制御を終了する。
【0102】
以上説明した実施の形態では、規格化された映像処理方式としてNTSC規格とPAL規格を用いたが、PAL規格に換えてSECAM(Sequentiel couleur a memoire)規格を用いても良い。SECAM規格はフランス等で主に使用される映像処理方式であり、垂直同期周波数が50HzでPAL規格と同様となる。さらに、これら規格に換えてLED式信号機の明滅の影響を受けない他の映像処理方式を採用してもよい。すなわち、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合において、再生装置に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように撮影タイミングが設定された映像処理方式であればよい。なお、いずれの灯火部の点灯時間よりも短い時間とは、一般的には点灯時間の最短となる黄色表示の点灯時間より短い時間である。
【0103】
以上説明した本発明の実施の形態に係るドライブレコーダによれば、車両の位置に適した規格化された映像処理方式を用いて映像を記録することができる。したがって、車両1の置かれた位置に設置されるLED信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することが可能となり、記録したLED式信号機の灯火の消灯時間を短くすることができる。これにより、映像による事故等の検証がより確実なものとなる。
【0104】
また、本発明の実施の形態に係るドライブレコーダによれば、従来から使用される映像処理の規格を使用するので、カメラ取付けの際に別途モニタを用意することなく、従来から使用される規格化された信号を表示する車載モニタにて映像確認をすることができる。
【図面の簡単な説明】
【0105】
【図1】ドライブレコーダ2を車両1に搭載した例を示す図
【図2】商用電源周波数の東西の区分を示す図
【図3】LED信号機の明滅と映像取り込みタイミングとの関係を示す図
【図4】映像中のLED式信号機の灯火明滅周期と撮影タイミングとの関係を示す図
【図5】映像におけるLED信号機の点灯状態の例を示す図
【図6】映像中の灯火消灯状態の時間と黄色灯火の点灯時間との関係を示す図
【図7】映像記録装置の機能的構成を示すブロック図
【図8】ドライブレコーダ2の電気的構成を示すブロック図
【図9】CPU20の動作を示すフローチャート
【図10】JPEG−IC8の動作を示すフローチャート
【図11】カメラ3の動作を示すフローチャート
【符号の説明】
【0106】
1 車両
2 ドライブレコーダ本体
3 カメラ
4 Gセンサ
7 CPU
8 JPEG−IC
10 第2RAM
11 フラッシュROM
12 GPSアンテナ
14 バッテリ
15 ACCスイッチ
19 撮影スイッチ
【技術分野】
【0001】
この発明は、車両等に搭載されたカメラによって走行中の車両の前方を記録する車載用映像記録装置に関する。
【背景技術】
【0002】
従来、自動車に設置したビデオカメラによる撮影情報を順次循環して(以下「エンドレス」という)記憶しておき、車両の衝突など事故発生時に記憶した撮影情報を他の記録媒体に記録し事故前後の映像を得て事故原因を検証する車載用映像記録装置、いわゆるドライブレコーダが提案されている(参考文献1)。
【0003】
図1に示すように、車両1内にドライブレコーダ2は設置され、車両1の前方を撮影するビデオカメラ3と接続されている。ビデオカメラ3の撮影情報をドライブレコーダ2内の半導体記憶装置にエンドレスに記憶を行う。事故等の発生により車両1へ衝撃が加わると、重力加速度検出センサ4が検知し、ドライブレコーダ2において事故発生と判定され、半導体記憶装置に記憶された撮影情報を記録カード5へ記録する。これにより、事故前後の数秒間に渡る車両1の前方の映像がカード内に記録される。
【0004】
記録カード5に記録された撮影情報はパーソナルコンピュータ等の再生装置5aにより映像として再生され、事故原因の究明等に役立てることが出来る。特に、車両用交通信号灯器(以下「信号機」といい、車両用のほか歩行者用、自転車用を含む)のある交差点で事故が発生した場合には、記録された映像に事故発生時の信号機の灯火が映っていることがあり、交通状況の把握や当事者責任の判定に極めて有効となる。
【0005】
ところで、平成6年から信号機の灯火部にLED(Light-Emitting Diode;発光ダイオード)が用いられるようになった。LED式信号機は、商用電源を全波整流した電源を用いているため、印加される電圧は商用電源の2倍の周波数、すなわち東日本では100Hz、西日本では120Hzで変化している。また、LEDは点灯に一定以上の電圧印加を必要とする。このため、LED式信号機では電源電圧の約1/2以上の電圧印加で点灯するよう構成されている。したがって、LED式信号機は従来の電球式信号機が連続的に発光しているのと異なり、商用電源の2倍の周波数で明滅を繰り返して発光している。
【0006】
なお、商用電源周波数の東西の区分は、一般に静岡県の富士川と新潟県の糸魚川を結ぶ線が境界とされ、東側が50Hz、西側が60Hzとされる。実際には電力会社毎に供給約款で標準周波数を定めており、山梨県と新潟県(一部例外あり)は50Hz、長野県(一部例外あり)は60Hzとなっている(図2参照)。
【0007】
また、ドライブレコーダ2へ映像信号を送るビデオカメラ3は、NTSC(National Television System Committee)規格による映像信号の周波数(59.94Hz)又はPAL(Phase Alternating Line)規格による映像信号の周波数(50Hz)で映像を取り込み、取り込んだ映像に対応したビデオ信号を出力する。さらに、一般的にはTVモニタや液晶モニタ等もNTSC又はPAL規格による映像信号の周波数で、映像を表示するよう構成されている。
【0008】
このような事情において、ビデオカメラでLED式信号機を撮影した場合、信号機の明滅周期(120Hz又は100Hz)とビデオカメラの映像取り込みタイミング(59.94Hz又は50Hz)との関係から、取り込んだ映像から信号機の表示色が判別できない場合が生じている。以下その理由について説明する。
【0009】
図3は、LED式信号機の明滅と映像取り込みタイミングとの関係を示す図である。
【0010】
図3(a)は、100Hzで明滅している信号機の灯火を50Hzのタイミングで撮影して取り込んだ場合を示す。図中、「A」は、灯火が最も明るいタイミングで映像を取り込んだ場合であり、「B」は、灯火が最も暗いタイミングで映像を取り込んだ場合である。すなわち、「A」の場合には、取り込んだ全ての映像において灯火の表示色を判別できるが、「B」の場合には、取り込んだ全ての映像において灯火の表示色を判別することができない。このように、灯火の明滅周波数と映像の取り込みタイミングの整数倍とが一致すると、映像を取り込んでも、「B」に示すように信号機の灯火の表示色を判別することができない場合が生じる。
【0011】
図3(b)は100Hzで明滅している灯火を45Hzのタイミングで撮影して取り込んだ場合を示す。C1〜C16は映像の取り込みのタイミングを示している。この場合、灯火の明滅周波数と映像取り込みタイミングの整数倍とが一致しないので、取り込まれた映像中の灯火は周波数fb(Hz)で明滅を繰り返す。例えば、C1、C2、C5、C6、C9、C10、C11、C14、C15では取り込まれた映像中で、信号機の灯火の表示色を判別することができる。このように、灯火の明滅周波数と映像の取り込みタイミングの整数倍とが一致しないと、映像の取り込みタイミングのいずれかで信号機の灯火の表示色を判別することができる。
【0012】
灯火の明滅周波数fs(Hz)と取り込まれた映像中の灯火の明滅周波数fb(Hz)は、以下の式(1)に示す関係となる。ただし、映像の取り込み周波数をfr(Hz)とし、式中のnはfr×nをfsに最も近い値とする整数である。
【0013】
fb=|fs−fr×n| ・・・(1)
【0014】
例えば、図3(b)に示す状態を式(1)に当てはめると、fb=(100−45×2)=10(Hz)となり、取り込まれた映像中の灯火は、0.1秒周期で明滅を繰り返す。
【0015】
図4(a)は、東日本と西日本においてNTSC規格またはPAL規格を用いてLED式信号機を撮影した場合に、再生映像における信号機の灯火の明滅周期(秒)を示した図である。東日本においてPAL規格を用いた場合は、灯火の明滅周期は0.00秒となる。すなわち、この場合のみ灯火の明滅は生じない。図4(b)は、東日本と西日本においてNTSC規格またはPAL規格を用いた場合に、灯火の明滅周期と撮影タイミングとの関係を示した図である。東日本においてPAL規格を用いた場合は、灯火の明滅は生じないため、灯火の明滅周期と撮影タイミングは一致する。すなわち、東日本でPAL規格を用いると再生映像において、灯火が全消灯して映る場合が生じ、この場合に映像中で信号機の表示を判別できないこととなる。
【0016】
図5は、120Hzで明滅を繰り返す西日本のLED式信号機をNTSC規格の映像信号の周波数(59.94Hz)で撮影した場合を示したものである。図において、縦軸は信号機のLEDに印加される電圧を示し、横軸は時間(秒)を示す。また、電源電圧の1/2に相当する閾値電圧S以上の電圧が印加すれば、LEDが点灯して信号機の表示色は判別可能となり、閾値電圧S未満の電圧が印加した場合には、LEDが充分に点灯せず信号機の表示色は判別不能となるものとする。さらに、曲線Cは映像の取り込みタイミングでの信号機のLEDに印加される電圧状態を示したものである。
【0017】
図5の場合、式(1)より、取り込まれた映像中の灯火の明滅周波数は0.12(Hz)、明滅周期は約8.33秒となる。すなわち、曲線Cは約8.33秒周期で点灯と消灯を繰り返すこととなる。図2において、時刻t0から時刻t1までの間、時刻t2から時刻t3までの間は、閾値電圧S以上の電圧が印加されるので、LEDが点灯して信号機の表示色は判別可能となる。しかしながら、図4において時刻t1から時刻t2までの間は、閾値電圧S未満の電圧しか印加されていないので、LEDが充分に点灯せず信号機の表示色は判別不能となる。すなわち、時刻t1から時刻t2までの期間(明滅周期の約1/3の期間)の約2.78秒は継続して信号機の表示色を判別することができない。特に、同期間が信号機の黄色の点灯時間(約2秒)に重複した場合には黄色の灯火状態を判別できない。この場合、例えば車両が交差点に進入したときの映像において、信号機が黄色であったか赤色であったか判別できず、交差点状況の検証ができないこととなる。
【0018】
図6(a)は、映像中のLED式信号機の灯火が消灯状態で映る時間(秒)を示した図である。図中の各数値は、図4(a)で示した点滅周期を1/3とした時間が該当する。図6(b)は、映像中の灯火消灯状態の時間と黄色灯火の点灯時間(約2秒)との関係を示した図である。西日本においてNTSC規格を用いた場合は、映像中の灯火消灯状態の時間のほうが、黄色灯火の点灯時間より長い。すなわち、黄色灯火が消灯状態のみ撮影される場合が生じ、この場合に映像中で信号機の表示を判別できないこととなる。
【0019】
なお、上記の例ではLED式信号機の点灯色のうち最も点灯時間が短い黄色の灯火を判別できない例として示した。しかし、歩行者又は自転車専用信号機のように黄色灯火のないものについては、それぞれ最短の点灯時間の灯火について判別できないこととなる。すなわち、歩行者等専用信号機の場合は、青色(緑色)灯火の点滅時の灯火(約0.5秒から1秒)が該当する。
【0020】
このように、ドライブレコーダにおいてビデオカメラでLED式信号機を撮影した場合、信号機の灯火の明滅周期と映像取り込みタイミングとの関係で、取り込んだ映像において信号機の表示色が判別できない場合が生じている。この問題は、ビデオカメラでの撮影がNTSC規格(59.94Hz)に基づく場合は西日本(120Hz)で発生し、PAL規格(50Hz)に基づく場合は東日本(100Hz)で発生している。
【0021】
そこで、対応策として撮影コマ数の調整及びカメラのシャッタースピードの調整が提案されている(参考文献2)。
【0022】
撮影コマ数の調整は、ドライブレコーダの撮影コマ数を商用電源周波数の約数とならないようにするものである。例えば、毎秒30.5コマに設定することで、LED信号機の灯火が瞬きやちらつきのある映像として撮影されるが、完全消灯とはならず灯火状況が判別できる。また、シャッタースピードの調整は、LED素子の1点滅周期より長くなるようシャッタースピードを調整するものである。例えば、LEDの点滅周期が100Hzの場合は1/100秒以上、120Hzの場合は1/120秒以上に設定することで灯火状況が判別できる。ただし、シャッタースピードの調整は、昼間映像では被写体の動きにぶれが生じてしまい事故等の画像検証が困難となる場合がある。
【0023】
【特許文献1】特開昭63−16785号公報
【特許文献2】『ドライブレコーダ映像に対するLED信号機の影響』自動車研究 第28巻 第7号(2006年7月)
【発明の開示】
【発明が解決しようとする課題】
【0024】
以上のように、商用電源周波数の東西の区分は図2の通りであるため、東西どちらかの地域のみで走行する場合には、東日本でNTSC規格、西日本でPAL規格を用いて撮影を行えばよい。しかし、例えば東日本から西日本へ走行中に商用電源の周波数帯域が変わった場合には、前述のように灯火が消灯して記録される問題が生じる。
【0025】
また、カメラの撮影コマ数を調整することで、灯火状況が判別できるものの、従来の撮影規格を用いないことにより、予め車両に備え付けられたモニタにて映像を直ちに表示することが出来ない。すなわち、一般的な車載用モニタは規格化されたビデオ信号のみ表示するよう構成されているためである。この場合、カメラ取付けの際にカメラ映像の確認に別途規格化されていない専用のモニタを用意する必要が生じ、取付け作業における不都合が生じる。
【0026】
本発明は、上記問題に鑑み発明されたものであって、その目的は、LED式信号機の灯火が消灯して記録されることを防止し、撮影地域の商用電源周波数に関わらずLED式信号機の映像を含む事故映像等の記録を行うことである。また、カメラ取付けに際し、別途モニタを用意することなく車載モニタにて映像確認できる車載用映像記録装置を提供することである。
【課題を解決するための手段】
【0027】
上記目的を達成するために、本発明(1)の車載用映像記録装置は、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する方式選択手段と、前記選択された映像処理方式に基づく映像情報を記録する記録手段とを備えることを特徴とする。
【0028】
本発明(1)によれば、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択するよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0029】
また、本発明(2)の車載用映像記録装置は、前記選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うことを特徴とする。
【0030】
本発明(2)によれば、複数の規格化された映像処理方式を備え、選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の全表示色について消灯状態のみの撮影とはならずに、各表示色の点灯状態を撮影することができる。すなわち、最も点灯時間の短い黄色の点灯状態をいずれかの撮影タイミングで撮影できるので、黄色より点灯時間の長い赤色および青色(緑色)の点灯状態も撮影することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0031】
また、本発明(3)の車載用映像記録装置は、車両の位置を検出する位置検出手段と、前記検出した位置が第一または第二の商用電源地域のいずれかを検出する地域検出手段と、
前記検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択する方式選択手段と、前記選択された映像処理方式に基づく映像情報を記録する記録手段とを備えることを特徴とする。
【0032】
本発明(3)によれば、車両の位置が第一または第二の商用電源地域のいずれかを検出し、検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択するよう構成した。このため、車両の位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の置かれた位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【0033】
また、本発明(4)の車載用映像記録方法は、車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する工程と、前記選択された映像処理方式に基づく映像情報を記録する工程を備えたことを特徴とする。
【0034】
本発明(4)によれば、複数の規格化された映像処理方式を備え、車両の位置に基づいて映像処理方式を選択する工程を備えるよう構成した。このため、車両の置かれた位置に適した映像処理方式を用いて映像を記録することができる。したがって、例えば車両の位置に設置されるLED式信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することができる。また、カメラ取付けの際に別途モニタを用意することなく車載モニタにて映像確認することができる。
【発明を実施するための最良の形態】
【0035】
以下、本発明の実施の形態を図面を参照して詳細に説明する。
【0036】
図7は本発明の映像記録装置の機能的構成を示すブロック図である。
映像記録装置100は、位置検出手段101、地域検出手段102、方式選択手段103、記録手段105、記録判断手段106及び衝撃検知手段107とを備え、車両に搭載されている。なお、映像記録装置100は撮影手段104および映像表示手段108と一体に構成してもよい。
【0037】
位置検出手段101は、車両の位置を検出し地域検出手段102へ位置情報を送信する。地域検出手段102は、位置検出手段101から車両の位置情報を受信した場合に、車両の位置と予め記憶している地域情報に基づいて、車両が置かれた地域の商用電源周波数を検出する。
【0038】
方式選択手段103は、検出された商用電源周波数に応じた撮影および映像信号の生成が行われるように映像処理の方式を選択し、方式選択信号を撮影手段104へ出力する。なお、映像処理とは撮影およびビデオ信号等の映像信号の生成をいう。方式選択手段103は、例えば、車両の置かれた地域の商用電源周波数が50Hzの場合には、映像処理方式がNTSC規格に基づく方式を選択し、かかる方式で映像処理が行われるように方式選択信号を出力する。また、車両の置かれた地域の商用電源周波数が60Hzの場合には、映像処理方式がPAL規格に基づく方式を選択し、かかる方式で映像処理が行われるように方式選択信号を出力する。
【0039】
撮影手段104は、複数の映像処理方式を備え、方式選択手段103から送信された方式選択信号に応じた映像処理方式に基づいて車両前方の撮影および映像信号の生成を行い、生成した映像信号を記録手段105へ送信する。
【0040】
記録手段105は、受信した映像信号を常時記憶しておき、記録判断手段106からの信号に基づいて記憶した映像信号を所定時間だけ別途記録する。この際、記録手段105は映像信号を画像ファイルとして記録することもできる。
【0041】
記録判断手段106は、衝撃検知手段107が検知した衝撃の大きさが車両事故等に相当する衝撃と判断した場合に記録手段105へ記録制御を実行させる信号を送信する。
【0042】
映像表示手段108は、記録手段105に記録された映像信号を受信し、映像として表示する。これにより、映像記録装置のユーザーは車両前方等の状況を映像にて検証することができる。
【0043】
以上の機能により、本発明は車両の置かれた地域に適した映像処理方式を用いて映像を記録することができる。すなわち、信号機を撮影した場合に、かかる信号機がLED式であっても、再生映像において灯火の消灯状態のみが表示されることを防止できる。また、カメラ取付けの際に車載モニタにて直ちに映像確認することができる。
【0044】
図8は、本願発明のドライブレコーダ2の電気的構成を示すブロック図である。
なお、ドライブレコーダ2は映像記録専用の装置として構成することもできるが、車載用ナビゲーション装置やビデオカメラと一体的に構成してもよい。
【0045】
カメラ3は、車両1の前方を撮影してアナログのビデオ信号を出力するよう制御され、CCDイメージセンサ(Charge Coupled Device Image Sensor)を備えて構成される。かかる撮影制御およびビデオ信号は規格化されており、本発明においてはNTSC規格またはPAL規格に準拠する。したがって、カメラ3は両方式のビデオ信号を出力できるように構成される。すなわち、NTSC規格およびPAL規格で撮影した映像情報を処理する各々のプログラムを備え、ドライブレコーダ2から送信される映像処理方式を選択する方式選択信号に基づいて、各プログラムを選択して撮影およびビデオ信号生成の制御を行う。なお、カメラ3は、本発明における撮影手段に相当する。
【0046】
Gセンサ(Gravity Accelerative Sensor)4は、車両1に加わる重力加速度を検出する。重力加速度を受けると電流を発生する半導体から構成され、車両の前後方向および左右方向の重力加速度の大きさを検出して出力する。なお、Gセンサ4は、本発明における衝撃検知手段に相当する。
【0047】
CFカード(Compact Flash Card)5は、ドライブレコーダ2から取り外し可能な記憶媒体であり、不揮発性半導体メモリであるフラッシュメモリから構成される。カメラ3により撮影された映像やマイクロフォン18により集音された音声の付加情報として車両1の位置、車両速度(以下「車速」)、Gセンサ3から得た重力加速度、時刻を記録する。本実施の形態では、例えば1秒間に10枚の静止映像がCFカード5に記録され、1回の記録条件の成立つき最大30秒間で300枚の静止映像がCFカード5に記録可能に構成されている。記録された映像等は、パーソナルコンピュータ等の再生装置にて表示することにより、ドライブレコーダ2のユーザーは車両の事故状況や運転状況を検証することができる。なお、上記のパーソナルコンピュータ等の再生装置は、本発明における映像表示手段に相当する。
【0048】
なお、記録条件は、例えばGセンサ8が検出する車両1へ加わる衝撃の大きさが所定値を越えるか否かが条件として設定される。すなわち重力加速度が1.0Gを100ミリ秒続けて超過した場合であり、車両1の衝突事故の発生と認識できる場合である。また、車速センサ9が検出する車両1の速度変化の大きさを条件として設定してもよい。すなわち、車両1の急減速または急加速を検出した場合には、事故の発生または事故の急迫と認識できるためである。
【0049】
また、本実施の形態では取り外し可能な記憶媒体としてCFカードを用いているが、必ずしもこれに限定されるものではなく、他の取り外し可能なメモリカード、ハードディスク等を利用することもできる。さらに、CFカード5の替わりに、ドライブレコーダ2にハードディスクを内蔵して用いることも可能であり、この場合にはドライブレコーダ2に送信回路を設け無線通信によりハードディスクに記録した映像データを再生装置へ送信するよう構成すればよい。
【0050】
CFカードインターフェース(以下「CFカードIF」)6は、ドライブレコーダ2に設けられたCFカードの差込口、いわゆるスロット部を構成する。上述のCFカード5はCFカードIF6に差し込まれた状態において、ドライブレコーダ2からの映像情報等が記録されることとなる。
【0051】
車速センサ7は、車両1の車輪軸に設けられたローターの回転をパルス信号として出力し、磁気センサまたは光センサにより構成されている。なお、CPU20は車速センサ7から受信するパルス信号から単位時間当たりの車輪回転数を算出することで車両1の車両速度を算出している。
【0052】
JPEG−IC(JPEG:Joint Photographic coding Experts Group、IC:Integrated Circuit)8は、NTSC規格およびPAL規格の映像処理回路を備え、CPU20から入力される映像処理方式を選択する方式選択信号に応じて、一方の映像処理回路を選択する。選択された映像処理回路を用いてカメラ3から入力されるビデオ信号をデジタル信号に変換し、JPEG形式のデータに変換する。変換したデータを後述の第1RAM9へ出力する。
【0053】
また、JPEG−IC8は、NTSC規格のビデオ信号を受信して変換処理を行う場合に、毎秒30ファイルを第1RAM9へ書込み、1ファイル毎に上書き処理を行う。これは、第1RAM9の容量を少なく設定しているためであり、またJPEG−IC8はアドレスを指定してデータを出力する機能を有さないため、第1RAM9においては1ファイル毎に上書き処理が行われるためである。なお、PAL規格で処理を行う場合には、毎秒25ファイルで同様の処理を行うこととなる。
【0054】
第1RAM(Random Access Memory)9は、JPEG−IC8によってJPEG形式に変換された映像データを一時的に記憶する。なお、第1RAM9はCPU20内のDMA(Direct Memory Access)回路と接続されており、入力された映像のうち3枚に1枚がDMAの機能により第2RAM10へ転送され、エンドレスに記憶される。つまり、NTSC規格に基づいて撮影された映像の場合、約100ミリ秒毎に1枚の映像が第2RAM10に記憶されることとなるが、車両1の走行状態等を検証するうえで支障がなく、CFカード5の容量を節約することができる。この場合、数十秒間の映像を記憶するのに、CFカード5の容量は128〜256メガバイト程度で足りる。
【0055】
第2RAM10は、JPEG−IC8によりJPEG形式に変換された映像情報、マイクロフォン18により集音された音声情報、および運行情報としてGPSレシーバ13によって受信した電波信号に基づいて測定される車両1の位置、時刻、車速センサ7により検出される速度、Gセンサ4によって検出される重力加速度をエンドレスに記憶する。
【0056】
なお、第1および第2RAMはSDRAM(Synchronous Dynamic Random Access Memory)を用いることが望ましい。SDRAMはCPUのクロックに同期して動作するよう設計されているため、入出力の待ち時間が短く、従来のSDRAM(Dynamic Random Access Memory)に比較してアクセスを高速に行うことができ、大容量の映像データを高速に処理する制御に適しているためである。
【0057】
フラッシュROM(Flash Read Only Memory)11は、ドライブレコーダ2を構成するハードウェア資源を統括的に制御するための制御プログラムを記憶する。また、地図情報を記憶し、図2に示すような東日本と西日本を区別する地域情報をも記憶している。具体的には、商用電源周波数が50Hzと60Hzに分かれる境界線を緯度・経度情報として記憶する。GPSレシーバ13で受信される緯度・経度による車両位置が境界線より西であれば西日本と判断することができる。または、緯度・経度に対応する地名を検索し、かかる地名において使用される商用電源周波数を検索できる地図情報をフラッシュROM11に記憶してもよい。
【0058】
GPS(Global Positioning System)アンテナ12は、図示しない複数のGPS衛星へ電波を発信し、反射された電波を受信するよう構成されている。受信した電波には自車両の緯度・経度からなる位置情報および時刻情報が含まれる。
【0059】
GPSレシーバ13は、GPSアンテナ12を介して、GPS衛星からの電波信号を受信し、受信した電波信号をCPU20に送信する。CPU20はGPSレシーバ13から受信した電波信号に基づいて、自車両の緯度・経度からなる位置情報および時刻情報を測定する。
【0060】
バッテリ14は、車両内に備えられ、ドライブレコーダ2の本体に電源を供給する。車両に装備可能で12Vの起電力を発生できるものであればよい。
【0061】
アクセサリスイッチ(以下「ACCスイッチ」)15は、車両1に備えられたエンジン始動用のキーシリンダと電気的に一体に構成されている。ユーザーのキー操作によりスイッチがオンとされるとオン信号をドライブレコーダ2へ送信する。ドライブレコーダ2はACCスイッチ15のオン信号を受信することにより、制御を開始する。
【0062】
電源スイッチ(以下「電源SW」)16は、ユーザーによりスイッチ操作がなされると、オン信号をドライブレコーダ2へ送信する。ACCスイッチ15をオンさせずにドライブレコーダ2を動作させたい場合に用いることができる。
【0063】
電源部17は、CPU20に接続されACCスイッチ15からのオン信号を受信することで、バッテリ14からの電源をCPU20およびドライブレコーダ2の各部へ供給する。また、電源SW16が操作されたことを検知すると、ACCスイッチ15の状態に関わらず電源の供給を開始する。さらに電源部17はACCスイッチ15または電源SW16のオフを検知することにより、終了信号をCPU20へ送信する。終了信号を受信したCPU20は、制御の終了処理として電源部17にオフ信号を送信する。これにより、電源部17が電源の供給を停止する。
【0064】
マイクロフォン18は、CPU20と電気的に接続され、車両1の車室内または車外の音声を集音してCPU20へ送信するよう構成されている。道路上の騒音を不必要に集音しないように、マイクロフォンの正面の感度が高い単一指向性マイクロフォンを用いるとよい。
【0065】
撮影スイッチ(以下「撮影SW」)19は、ユーザーにより操作されることにより、電気的に接続されたCPU20へ信号を送信する。これにより、CPU20は第2RAM10に記憶された映像情報等をCFカード5に記録させるよう制御する。すなわち、撮影SW19の操作は上述の記録条件の成立として作用する。なお、撮影SW19が操作された瞬間の映像情報のみをCFカード5に記録するようにしてもよい。
【0066】
CPU(Central Processing Unit)20は、ドライブレコーダ2の制御装置として動作し、マイクロコンピュータ等により構成される。CPU20はGPSレシーバ13から検出した車両の位置情報、時刻情報、車速センサ7から検出した車速、およびGセンサ4から検出した重力加速度からなる運行情報、さらに第1RAM9に記憶された映像情報およびマイクロフォン18の音声情報を定期的に第2RAM10にエンドレスに記憶する。そして記録条件の成立を検出すると、記録条件成立前15秒間、および成立後15秒間の合計30秒間の運行、映像および音声情報を第2RAM10からCFカード5に転送して記録する。
【0067】
また、CPU20は、GPSレシーバ13から検出した位置情報に基づき、カメラ3およびJPEG−IC8の映像処理方式がLED式信号機の明滅の影響を受けない規格化された映像処理方式となるよう制御する。すなわち、車両位置が商用電源周波数50Hzである東日本地区であればNTSC規格の映像処理方式を選択する方式選択信号をカメラ3とJPEG−IC8に出力する。一方、車両位置が商用電源周波数60Hzである西日本地区であればPAL規格の映像処理方式を選択する方式選択信号をカメラ3とJPEG−IC8に出力する。
【0068】
なお、CPU20は、本発明における位置検出手段、地域検出手段、方式選択手段、記録手段および記録判断手段に相当する。ただし、位置検出手段にGPSレシーバ13、またはGPSレシーバ13とGPSアンテナ12の組合せを相当させてもよい。この場合には、位置検出手段をドライブレコーダ2の外部に設けることも可能である。さらに、GPSアンテナ12およびGPSレシーバ13を用いることなく、ユーザーの手動操作によりCPU20へ車両位置の設定を行ってもよい。この場合には、ドライブレコーダ2の外部にスイッチを設け、ユーザーのスイッチ操作により東日本または西日本を表す信号をCPU20へ入力することにより、車両位置の設定を行うことができる。さらに、記録手段に第1RAM9または第2RAM10、または両者の組合せを相当させてもよい。この場合には、各RAMをドライブレコーダ2の外部に設けることもできる。
【0069】
ここで、東日本においてNTSC規格、西日本においてPAL規格を用いて撮影した場合における、LED式信号機の明滅の影響を受けない例について以下に説明する。東日本においてNTSC規格に基づく映像処理方式で撮影を行った場合、映像中のLED式信号機の明滅周波数fbは前述の(1)式をもとに計算すると19.88Hz(周期約0.05秒)となるため、映像中の消灯時間は明滅周期の1/3とすると約0.02秒となる。また、西日本においてPAL規格に基づく映像処理方式で撮影を行なった場合も同様に計算すると、明滅周波数fbは20.00Hz、映像中の消灯時間は約0.02秒となる。
【0070】
このように、東日本、西日本のどちらにおいても映像中の消灯時間は約0.02秒となる。このため、映像中の消灯時間は、LED式信号機の点灯時間の最も短い黄色表示の点灯時間の約2秒より充分に短い時間となる。したがって、LED式信号機の明滅の影響を受けることなく信号機の黄色点灯状態を確認することができる。しかも、NTSC規格およびPAL規格の映像処理方式を用いるため、カメラ取付けの際に別途モニタを用意することなく、従来から使用される規格化されたビデオ信号を表示する車載モニタにて映像確認を行うことができる。なお、映像中の消灯時間が撮影地域におけるLED式信号機の黄色点灯時間以下になる映像処理方式であれば他の方式を採用してもよい。
【0071】
次に、CPU20の動作について図9を参照して説明する。
電源部17はACCスイッチ15または電源SW16からのオン信号を受信するとバッテリ14からの電源をCPU20へ供給する。CPU20はこの電源の供給を受けると起動処理を開始する(ステップ100)。起動処理はフラッシュROM11内の制御プログラムを読み出して実行することにより、演算処理を行う準備がなされる。また、フラッシュROM11内の制御用のデータを読み出し、第2RAM10内に初期値として設定する。この際、東日本と西日本とを判別可能な地図情報の読み出しも行う。
【0072】
起動処理が完了するとCPU20が接続されるJPEG−IC8、Gセンサ4等のドライブレコーダ2を構成する各部へ電源を供給する(ステップ101)。
【0073】
次に、車両1の位置および時刻をGPSアンテナ12からGPSレシーバ13を介して検出する(ステップ102)。
【0074】
次に、予め読み出している東日本と西日本とを判別可能な地図情報、すなわち緯度・経度情報および車両位置に基づいて、車両の置かれた地域が東日本か西日本かを判断する(ステップ103)。なお、ステップ102およびステップ103の工程は、本発明における車両の位置を検出する工程に相当する。
【0075】
東日本であると判断される場合はステップ104に移行する。ステップ104では前回も東日本か否かを判断する。なお、「前回」とはCPU20の起動中における前回の場合であり、起動後最初の処理ルーチンでの処理においては前回データがない。この場合、ステップ104での「前回も東日本か」の判断は否となる。
【0076】
ステップ104において否と判定した場合、つまり東日本でない(西日本である)と判断される場合は、東日本におけるCPU20起動後の初回判断時であるか、または走行地点が西日本から東日本へ変化した直後であることを示すため、東日本におけるLED式信号機の映像の灯火消灯時間が短くなるよう、NTSC規格を選択する方式選択信号をカメラ3およびJPEG−IC8へ出力する(ステップ105)。カメラ3およびJPEG−IC8はCPU20からの方式選択信号を受信すると、以後NTSC方式に基づいて制御を行う。
【0077】
ステップ104において、東日本であると判断される場合は直ちにステップ108に移行する。つまり、前回東日本と判断された時点でカメラ3およびJPEG−IC8の映像処理にNTSC規格を選択しているため、今回の処理で再び同規格を選択する必要がないためである。
【0078】
一方、ステップ103において、西日本であると判断される場合はステップ106に移行する。ステップ106では前回も西日本か否かを判断する。
【0079】
ステップ106において否と判定した場合、つまり西日本でない(東日本である)と判断される場合は、西日本におけるCPU20起動後の初回判断時であるか、または走行地点が東日本から西日本へ変化した直後であることを示すため、西日本におけるLED信号機の映像の灯火消灯時間が短くなるようPAL規格を選択する方式選択信号をカメラ3およびJPEG−IC8へ出力する(ステップ107)。カメラ3およびJPEG−IC8はCPU20からの方式選択信号を受信すると、以後PAL規格で制御を行う。
【0080】
ステップ106において、西日本であると判断される場合は直ちにステップ108に移行する。つまり、前回西日本と判断された時点でカメラ3およびJPEG−IC8の映像処理にPAL規格を選択しているため、今回の処理で再び同規格を選択する必要がないためである。
【0081】
なお、ステップ103からステップ107までの工程は、本発明における映像処理方式を選択する工程に相当する。
【0082】
ステップ108では、車両の位置、時刻、車速、重力加速度からなる運行情報を第2RAMへ記憶させる。
【0083】
ステップ109では、JPEG−IC8から出力されるJPEGファイル形式による映像情報をステップ108で記憶した運行情報と対応させて第2RAM10へ記憶させる。
【0084】
ステップ110では、ステップ108で記憶した運行情報と対応させてマイクロフォン18の集音する音声情報を第2RAM10へ記憶させる。
【0085】
ステップ111では映像等の記録条件が成立したか否かが判断される。記録条件が成立する場合は、車両1が衝突に相当するような衝撃等を受けた場合に、Gセンサ4からの重力加速度に基づいてCPU20が衝突と判断した場合である。また、撮影SW19が操作された場合も含まれる。記録条件が成立したと判断するとステップ112へ移行する。なお、記録条件が成立するとCPU20は記録条件成立フラグをONとする。フラグがONとなると後のステップ114でフラグがOFFとされるまでは、ステップ111における条件判断は常に成立すると判断され、ステップ112への移行制御が行われる。
【0086】
ステップ112では第2RAM10に記憶された映像、音声情報と車両の位置、時刻、速度、重力加速度からなる運行情報をCFカード5へ記録する。なお、本フローにおいてステップ112の制御を初めて実行する場合には、第2RAM10に記憶されている記録条件の成立前15秒間の各情報をCFカード5へ記録する。2回目以降に実行する場合には、直前のステップ108、109、110で記憶された各情報をCFカード5へ記録する。なお、ステップ112の工程は、本発明の映像情報を記録する工程に相当する。ただし、ステップ109を本発明の映像情報を記録する工程に相当させてもよいし、ステップ109およびステップ112の両者を相当させてもよい。
【0087】
ステップ113では、記録条件成立から15秒が経過したか否か判断される。15秒が経過していないと判断される場合にはステップ108へ戻り、再び各情報の第2RAM10への記憶とCFカード5への記録を繰り返す。これにより、記録条件の成立前15秒間および成立後15秒間の合計30秒間に渡る各情報がCFカード5へ記録される。一方、記録条件成立から15秒経過したと判断された場合にはステップ114へ移行する。
【0088】
ステップ114では、ステップ111においてONとした記録条件成立フラグをOFFとする。これにより、新たに記録条件が成立しなければ、次回のステップ111における判断は否となり、画像情報等をCFカード5へ記録する制御は実行されない。
【0089】
なお、ステップ111で記録条件が成立していないと判断した場合は、映像等のCFカード5への記録を行わずステップ115へ移行する。
【0090】
ステップ115では電源部17からの終了信号を受信したか否かが判定される。受信したと判断される場合には、ステップ116に移行する。受信したと判断されない場合にはステップ102に戻り、車両1の位置情報を再び取得して前述の制御を繰り返し実行する。つまり、ACCスイッチ15がオンである間は、車両1が移動している場合があり、東日本から西日本へまたは西日本から東日本へ境界を越えて移動する場合がある。このため、ACCスイッチ15のオンの間は所定の間隔で位置情報を取得して、かかる境界を超えたと判断された場合に適切な映像処理方式を選択するよう方式選択信号を送信する必要がある。
【0091】
ステップ116では、CPU20の終了処理を行う。すなわち電源部17にオフ信号を出力することにより、電源部17からの電源の供給が遮断される。終了処理が実行されると本フローチャートは終了する。
【0092】
次に、JPEG−IC8の制御を図10を参照して説明する。
JPEG−IC8は電源部17より電源の供給を受けて制御を開始する。制御が開始するとCPU20から映像処理方式を選択する方式選択信号を受信したか否か判断する(ステップ200)。受信した場合はステップ201へ移行する。受信していないと判断される場合には続く制御を行わずステップ204に移行する。
【0093】
ステップ201では、CPU20から受信した方式選択信号がNTSC方式であるかPAL方式であるかを判断する。NTSC方式と判断される場合にはステップ202へ移行し、PAL方式と判断される場合にはステップ203に移行する。
【0094】
ステップ202において、JPEG−IC8は映像データの処理方式にNTSC方式を選択して設定する。
【0095】
次に、カメラ2で撮影された映像情報をビデオ信号として受信する(ステップ204)。ビデオ信号を受信すると、A/D変換を行い、(ステップ205)、ビデオ信号をJPEG形式に変換を行う(ステップ206)。
【0096】
ステップ207において、JPEG形式に変換したデータを第1RAM9に記憶させる。記憶制御が完了すると本制御を終了する。
【0097】
次に、カメラ3の制御を図11を参照して説明する。
カメラ3は電源部17より電源の供給を受けて制御を開始する。制御が開始するとCPU20から映像処理方式を選択する方式選択信号を受信したか否か判断する(ステップ300)。受信した場合はステップ301へ移行する。受信していないと判断される場合には続く制御を行わずステップ304に移行する。
【0098】
ステップ301では、CPU20から受信した方式選択信号がNTSC方式であるかPAL方式であるかを判断する。NTSC方式と判断される場合にはステップ302へ移行し、PAL方式と判断される場合にはステップ303に移行する。
【0099】
ステップ302において、カメラ3は撮影制御およびビデオ信号生成の方式にNTSC方式を選択して設定する。また、ステップ303に移行した場合にはPAL方式を選択して撮影制御等を行う。
【0100】
なお、カメラ3は映像処理方式を選択した場合に、すなわちステップ302またはステップ303の後に、映像処理方式を選択した旨の信号をJPEG−IC8へ送信するよう構成してもよい。この場合、JPEG−IC8は、当該信号を受信すると、カメラ3から送信されるNTSC方式又はPAL方式のビデオ信号に同期してJPEGファイルへの変換処理が行えるように自らの処理方式を選択して設定する。これにより、CPU20から直接に方式選択信号を受信する構成を省略することができる。
【0101】
ステップ304では、ステップ302または303で選択された方式で撮影制御をおこない、撮影した映像をビデオ信号に変換する(ステップ305)。そしてビデオ信号をJPEG−IC8へ出力して(ステップ306)、本制御を終了する。
【0102】
以上説明した実施の形態では、規格化された映像処理方式としてNTSC規格とPAL規格を用いたが、PAL規格に換えてSECAM(Sequentiel couleur a memoire)規格を用いても良い。SECAM規格はフランス等で主に使用される映像処理方式であり、垂直同期周波数が50HzでPAL規格と同様となる。さらに、これら規格に換えてLED式信号機の明滅の影響を受けない他の映像処理方式を採用してもよい。すなわち、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合において、再生装置に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように撮影タイミングが設定された映像処理方式であればよい。なお、いずれの灯火部の点灯時間よりも短い時間とは、一般的には点灯時間の最短となる黄色表示の点灯時間より短い時間である。
【0103】
以上説明した本発明の実施の形態に係るドライブレコーダによれば、車両の位置に適した規格化された映像処理方式を用いて映像を記録することができる。したがって、車両1の置かれた位置に設置されるLED信号機の灯火の消灯周期と映像記録周期を同期させずに映像を記録することが可能となり、記録したLED式信号機の灯火の消灯時間を短くすることができる。これにより、映像による事故等の検証がより確実なものとなる。
【0104】
また、本発明の実施の形態に係るドライブレコーダによれば、従来から使用される映像処理の規格を使用するので、カメラ取付けの際に別途モニタを用意することなく、従来から使用される規格化された信号を表示する車載モニタにて映像確認をすることができる。
【図面の簡単な説明】
【0105】
【図1】ドライブレコーダ2を車両1に搭載した例を示す図
【図2】商用電源周波数の東西の区分を示す図
【図3】LED信号機の明滅と映像取り込みタイミングとの関係を示す図
【図4】映像中のLED式信号機の灯火明滅周期と撮影タイミングとの関係を示す図
【図5】映像におけるLED信号機の点灯状態の例を示す図
【図6】映像中の灯火消灯状態の時間と黄色灯火の点灯時間との関係を示す図
【図7】映像記録装置の機能的構成を示すブロック図
【図8】ドライブレコーダ2の電気的構成を示すブロック図
【図9】CPU20の動作を示すフローチャート
【図10】JPEG−IC8の動作を示すフローチャート
【図11】カメラ3の動作を示すフローチャート
【符号の説明】
【0106】
1 車両
2 ドライブレコーダ本体
3 カメラ
4 Gセンサ
7 CPU
8 JPEG−IC
10 第2RAM
11 フラッシュROM
12 GPSアンテナ
14 バッテリ
15 ACCスイッチ
19 撮影スイッチ
【特許請求の範囲】
【請求項1】
車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する方式選択手段と、
前記選択された映像処理方式に基づく映像情報を記録する記録手段と
を備えることを特徴とする車載用映像記録装置。
【請求項2】
前記選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うことを特徴とする請求項1に記載の車載用映像記録装置。
【請求項3】
車両の位置を検出する位置検出手段と、
前記検出した位置が第一または第二の商用電源地域のいずれかを検出する地域検出手段と、
前記検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択する方式選択手段と、
前記選択された映像処理方式に基づく映像情報を記録する記録手段と
を備えることを特徴とする車載用映像記録装置。
【請求項4】
車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する工程と、
前記選択された映像処理方式に基づく映像情報を記録する工程と
を備えたことを特徴とする車載用映像記録方法。
【請求項1】
車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する方式選択手段と、
前記選択された映像処理方式に基づく映像情報を記録する記録手段と
を備えることを特徴とする車載用映像記録装置。
【請求項2】
前記選択された映像処理方式は、撮影周期がLED式信号機の灯火の明滅周期と同期せず、かつLED式信号機を映像表示した場合に灯火が消灯して表示される時間が、いずれの灯火部の点灯時間よりも短くなるように映像処理を行うことを特徴とする請求項1に記載の車載用映像記録装置。
【請求項3】
車両の位置を検出する位置検出手段と、
前記検出した位置が第一または第二の商用電源地域のいずれかを検出する地域検出手段と、
前記検出した地域に基づいてNTSC規格またはPAL規格に基づく映像処理方式のいずれかを選択する方式選択手段と、
前記選択された映像処理方式に基づく映像情報を記録する記録手段と
を備えることを特徴とする車載用映像記録装置。
【請求項4】
車両の位置に基づいて複数の規格化された映像処理方式のうちいずれかの方式を選択する工程と、
前記選択された映像処理方式に基づく映像情報を記録する工程と
を備えたことを特徴とする車載用映像記録方法。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−250849(P2008−250849A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−93986(P2007−93986)
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]