
車載用表示制御装置、車載用表示制御方法および車載用表示制御プログラム
【課題】走行可能範囲画像と現在位置画像とを明確に識別することが困難であった。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得し、表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させ、前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較し、比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する。
【解決手段】自車両の現在位置を示す情報を取得し、前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得し、表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させ、前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較し、比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図上に走行可能範囲を示す情報を表示する車載用表示制御装置、車載用表示制御方法および車載用表示制御プログラムに関する。
【背景技術】
【0002】
従来、充電池の電力にて走行する自車両において当該充電池の残電力量に応じた走行可能範囲を自車両の現在位置とともに表示部に表示する技術が知られている(例えば、特許文献1参照)。具体的には、充電池の残電力量に応じた車両の登坂能力と道路地図上における各道路の地形情報とを考慮して車両の走行可能距離を求め、求められた当該走行可能距離に基づいて走行可能範囲を地図上に表示している。
【特許文献1】特許第3177806号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の技術では、充電池の残電力量に応じた走行可能範囲を示す画像(以下、単に「走行可能範囲画像」という)は、自車両の現在位置を起点とした範囲を示している。この構成において表示部に表示される地図の縮尺を切り替えてより広域の地図を表示すると、走行可能範囲画像の大きさは表示部の画面上において縮尺変更前に比べて小さくなる。そのため、地図の縮尺によっては、走行可能範囲画像と自車両の現在位置を示す画像(以下、単に「現在位置画像」という)とが重なり、両者を明確に識別することが困難である。
【0004】
また、充電池の残電力量を利用して自車両で走行すると、走行に伴う残電力量の減少により走行可能範囲が狭くなることで走行可能範囲画像の大きさが小さくなり、走行可能範囲画像と現在位置画像とを明確に識別することが困難になる。
本発明は、上記課題にかんがみてなされたもので、走行可能範囲をユーザに対して明確に示すことが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、表示部に地図を表示させるとともに、自車両の現在位置を示す現在位置画像と走行可能範囲を示す走行可能範囲画像とを地図上に表示させ、走行可能範囲画像の大きさと現在位置画像の大きさとを比較する。そして、比較の結果に基づいて、自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法を選択する。
【0006】
走行可能範囲画像は走行可能範囲を示しているため充電池の残電力量または縮尺の変更によりその大きさが変動し得る。しかし、現在位置画像は自車両の現在位置を示しているため、走行可能範囲画像のように充電池の残電力量に応じてその大きさが変動しない。そのため、充電池の残電力量によっては現在位置画像と走行可能範囲画像とが重なり、両画像を明確に識別できなくなる。そこで、表示部において自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択すると、走行可能範囲をユーザに対して明確に示すことができる。
【0007】
ここで、現在位置取得手段は、自車両の現在位置を示す情報を取得することができればよく種々の構成を採用可能である。例えば、GPSからの信号に基づいて自車両の現在位置を特定する構成や、自車両の位置をセンサやカメラによって特定する構成や、地図上での自車両の軌跡、車車間通信、路車間通信等に基づいて自車両の位置を特定する構成等を採用可能である。
【0008】
走行可能範囲取得手段は、自車両に搭載された充電池の残電力量で自車両を走行させることが可能な走行可能範囲を取得することができればよく種々の構成を採用可能である。例えば、各道路区間における車速や勾配等のパラメータと自車両の重量とに基づいて各道路区間を走行するための必要電力量を算出し、当該必要電力量と充電池の残電力量とに基づいて走行可能範囲を取得してもよい。また、自車両の過去の走行履歴と消費電力量の履歴と充電池の残電力量とに基づいて走行可能範囲を取得する構成を採用してもよい。また、自車両に搭載された、車載用表示制御装置とは異なる装置から走行可能距離を取得し、当該走行可能距離に基づいて走行可能範囲を決定する構成を採用してもよい。
【0009】
表示制御手段は、表示部に地図を表示させるとともに、自車両の現在位置を示す現在位置画像と走行可能範囲を示す走行可能範囲画像とを当該地図上に表示させることができればよい。現在位置画像は、自車両の現在位置を視覚的に示すための画像であればよく、例えば矢印、記号、文字などにより表示されてもよい。なお、現在位置画像は大きさが固定された画像あるいは地図の縮尺毎に大きさが固定された画像であることが好ましい。走行可能範囲画像は、現在位置を起点とした走行可能範囲を大きさによって示す画像であることが好ましく、例えば、充電池の残電力量によって現在位置から走行可能な限界地点を地図上の道路に示すことで表示されてもよい。また、走行可能範囲画像は、自車両の現在位置を中心とする、走行可能な距離によって大きさが変化する特定の図形(例えば走行可能距離によって半径が変化する円形)によって表示されてもよい。さらに、地図上の道路に沿って延びる、走行可能距離に対応する長さの線分によって走行可能範囲を表示してもよく、種々の構成を採用可能である。
【0010】
さらに、表示制御手段は、現在位置画像と走行可能範囲画像とのいずれか一方の画像を他方の画像の上に表示させてもよい。走行可能範囲が狭い場合、現在位置画像と走行可能範囲画像とを表示部に表示させようとすると両画像に表示上の重複部分が存在することがある。そのため、当該重複部分については、いずれか一方の画像を他方の画像の上に表示させることで当該一方の画像を優先して表示させる。
【0011】
画像比較手段は、現在位置画像の大きさと走行可能範囲画像の大きさとを比較することができればよく種々の構成を採用可能である。画像の大きさは、画像の面積によって決定されてもよいし、画像の径によって決定されてもよい。また、画像の中心と当該中心から当該画像上の最も離れた点との距離によって決定されてもよい。
【0012】
また、画像比較手段は、走行可能範囲画像の大きさの現在位置画像の大きさに対する比(以下、単に「画像比」という)を取得することができるとしてもよい。画像比は、ユーザが表示部上において走行可能範囲を明確に認識できるか否かを評価できる指標であればよく、(走行可能範囲画像の大きさ)/(現在位置画像の大きさ)で表される。
【0013】
表示方法選択手段は、自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法を選択することができればよく種々の構成を採用可能である。すなわち、現在位置画像の大きさと走行可能範囲画像の大きさとの比較結果を参照し、あらかじめ設定された規則に基づいて自車両の現在位置と走行可能範囲とを示すための表示方法を変更するか否かを判別する。変更する必要があると判別された場合に自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法が選択される。
【0014】
表示方法とは、現在位置を示す画像を現在位置画像として画面上で表現し、走行可能範囲を示す走行可能範囲画像を画面上で表現するための方法である。表示方法は、表示方法選択手段によって新たな表示方法が選択されることにより変更される。変更前の表示方法においては、現在位置画像と走行可能範囲画像との関係によって表示方法を選択しないためそれぞれが独立に変動し、走行可能範囲を適確に認識できなくなることが生じ得る。そのため、変更後の表示方法は自車両の現在位置と走行可能範囲とを識別可能に示すことにより走行可能範囲をユーザに対して明確に示すことができる方法であればよい。
【0015】
さらに、表示方法選択手段は、地図の縮尺を決定する表示方法を選択してもよい。すなわち、走行可能範囲画像の大きさは地図の縮尺に応じて変化するため、画像比が所定の値以下である(現在位置画像と走行可能範囲画像とを明確に識別することが困難である)場合、画像比が所定の値より大きくなるように地図の縮尺を決定する表示方法を選択する。具体的には、画像比を所定の値より大きくするために地図の縮尺を切り替えてより狭域の地図を表示させる。
【0016】
所定の値は、現在位置画像と走行可能範囲画像とを表示部上において明確に識別することが困難になる値としてあらかじめ決められた値であればよい。例えば、走行可能範囲画像が円形で示される場合、当該走行可能範囲画像の円周部と現在位置画像の輪郭とが重なり始める際の画像比を採用してもよい。自車両の走行可能範囲を示す円周部が現在位置画像と重なると、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できないことがあるからである。なお、所定の値は、ユーザによって任意に決定されてもよい。この場合、両画像を明確に識別できなくなる画像比をユーザが実際に確認した上で決定できるため、ユーザごとの主観を反映した設定が可能である。
【0017】
さらに、表示方法選択手段は、画像比が所定の値より大きくなるように現在位置画像の大きさを決定する表示方法を選択してもよい。こうした表示方法によれば、現在位置画像と走行可能範囲画像とを適確に識別できる。なお、現在位置画像の大きさは、固定された大きさあるいは地図の縮尺に対してあらかじめ決められた大きさであることが好ましい。こうした構成において画像比が所定の値以下である場合、画像比が所定の値より大きくなるように現在位置画像の大きさが変更され、走行可能範囲が明確に示される。具体的には、画像比を所定の値より大きくするために現在位置画像の大きさを変更前の大きさより小さくする必要がある。現在位置画像の変更の際に地図の縮尺は変更されないため、走行可能範囲画像の大きさはほとんど変化しない。そのため、画像比の算出において分母に該当する現在位置画像の大きさを小さくすることで画像比を所定の値より大きくし得る。
【0018】
さらに、表示方法選択手段は、表示部に既に表示されている地図とは縮尺が異なる第2地図に現在位置画像と走行可能範囲画像とを同時に表示させるとともに当該第2地図を既に表示されている地図とともに表示させる表示方法を選択してもよい。すなわち、現在位置画像と走行可能範囲画像との比較結果を参照し、既に表示されている地図において両画像を明確に識別できないと判別される場合には第2地図上に現在位置画像と走行可能範囲画像とを識別可能に示す。このような構成を採用することでユーザは走行可能範囲を適確に認識できる。
【0019】
さらに、表示方法選択手段は、現在位置画像と走行可能範囲画像とが表示部において重複部分を有する場合に上に表示させた画像を透過させる表示方法を選択してもよい。重複部分については、上に表示されている一方の画像を透過させることにより他方の画像をユーザが視認できるようにする。このような構成によれば、ユーザは走行可能範囲を適確に認識できるため、充電池の残電力量でどこまで走行可能かを知ることができる。
【0020】
なお、本発明のように地図上に表示される自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【発明を実施するための最良の形態】
【0021】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)車載用表示制御装置の構成:
(2)車載用表示制御処理:
(3)他の実施形態:
【0022】
(1)車載用表示制御装置の構成:
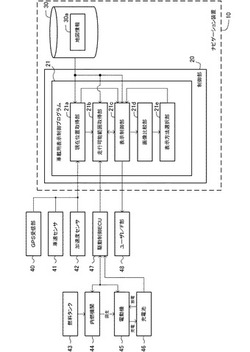
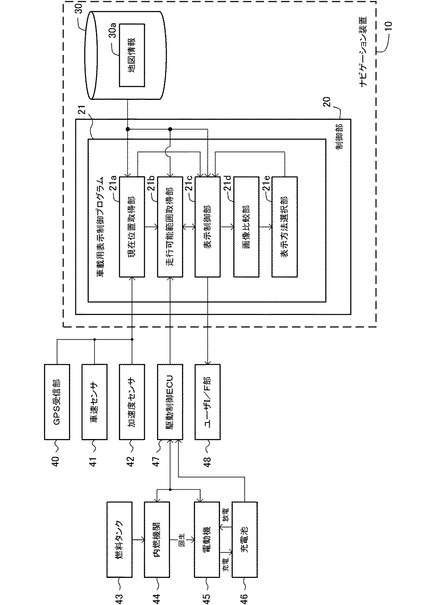
図1は、自車両に搭載された車載用表示制御装置の構成を示すブロック図である。本実施形態において車載用表示制御装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20と記憶媒体30とを備えており、記憶媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとして車載用表示制御プログラム21を実行可能であり、当該車載用表示制御プログラム21はその機能として地図上に表示される自車両の現在位置と走行可能範囲とを識別可能に示す表示方法を選択する機能を備えている。
【0023】
本実施形態における自車両(ナビゲーション装置10が搭載された車両)は、車載用表示制御プログラム21による機能を実現するためにGPS受信部40と車速センサ41と加速度センサ42と燃料タンク43と内燃機関44と電動機45と充電池46と駆動制御ECU47とユーザI/F48部とを備えており、これらの各部と制御部20とが協働することによって車載用表示制御プログラム21による機能を実現する。
【0024】
GPS受信部40は、GPS衛星からの電波を受信し、図示しないインタフェースを介して自車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して自車両の現在位置および現在時刻を取得する。車速センサ41は、自車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、自車両の速度を取得する。
【0025】
加速度センサ42は自車両に作用する加速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得する。車速センサ41や加速度センサ42は、各センサの出力信号が示す情報を取得するために利用されるとともに、GPS受信部40の出力信号から特定される自車両の現在位置を補正するためにも利用される。むろん、自車両の現在位置を取得するための構成は上述の構成に限られず、ジャイロセンサ等を利用して自車両の動作を取得する構成を採用してもよいし、車速センサ41やジャイロセンサ等の出力信号や自車両の軌跡に基づいて現在位置を補正する構成を採用してもよい。なお、自車両の動作を示す情報を取得するための構成は、ほかにも種々の構成を採用可能であり、自車両の現在位置をセンサやカメラによって特定する構成や、GPSからの信号や地図上での車両の軌跡、車車間通信、路車間通信等によって自車両の動作情報を取得する構成等を採用可能である。
【0026】
本実施形態の自車両は、駆動源として、燃料タンク43に蓄積された燃料を動力源とする内燃機関44と、充電池46を動力源とする電動機45とを備えたハイブリッド車両である。これらの内燃機関44と電動機45とは図示しない動力伝達機構に連結されており、当該動力伝達機構により回転駆動力を車両の推進力に変換することによって自車両を駆動させる。自車両は、内燃機関44と電動機45とのいずれかまたは双方によって駆動することができる。また、内燃機関44によって発生した回転駆動力の一部を回生エネルギーとして電動機45に伝達するように構成されており、この際に電動機45によって発電された電力は充電池46に蓄積される。
【0027】
内燃機関44と電動機45は、駆動制御ECU47に制御される。駆動制御ECU47は、内燃機関44と電動機45とに対して制御信号を出力可能であり、内燃機関44と電動機45とに対して制御信号を出力して内燃機関44と電動機45とのいずれかまたは双方が回転駆動力を発生させるように制御する。したがって、本実施形態においては、駆動制御ECU47が出力する制御信号によって内燃機関44の駆動や停止、電動機45による充電、充電池46の放電による電動機45の駆動が選択される。また、駆動制御ECU47は、充電池46から残電力量[%](SOC:State Of Charge)を取得して制御部20に通知する。なお、充電池46の現在の残電力量は、残電力量に対応した充電池46に関する各種のパラメータによって取得することが可能であり、SOCの他、電圧、電流、電解質のpH等によって残電力量を特定してもよい。
【0028】
ユーザI/F部48は、ユーザが指示を入力し、またはユーザに各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。また、制御部20は、ユーザI/F部48の表示部を介して自車両の現在位置や走行可能範囲をユーザに案内することができる。
【0029】
制御部20は、車載用表示制御プログラムを実行することにより、地図上に表示される自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択する処理を行う。そのため、車載用表示制御プログラム21は、現在位置取得部21aと走行可能範囲取得部21bと表示制御部21cと画像比較部21dと表示方法選択部21eとを備えており、記憶媒体30にはあらかじめ地図情報30aが記憶されている。地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ、道路の勾配を示す勾配データ、自車両の走行履歴および消費電力量の履歴等を含み、自車両の現在位置の特定や当該現在位置からの走行可能範囲を特定する際等に利用される。
【0030】
現在位置取得部21aは、自車両の現在位置を示す情報を取得する機能を制御部20に実現させるモジュールであり、制御部20は、現在位置取得部21aの処理により、GPS受信部40の出力信号が示す自車両の現在位置を示す情報を取得する。なお、制御部20は、車速センサ41が出力する出力信号を取得し、また、地図情報30aを参照して地図上での自車両の軌跡を基に自車両の現在位置を適宜補正する。現在位置を示す情報は、走行可能距離取得部21bや表示制御部21cに受け渡される。
【0031】
走行可能範囲取得部21bは、自車両に搭載された充電池の残電力量で自車両を走行させることが可能な走行可能範囲を取得する機能を制御部20に実現させるモジュールである。制御部20は、走行中に走行履歴と消費電力量の履歴とを取得して記憶媒体30に記録しており、走行可能範囲を取得するにあたり、制御部20は、当該走行履歴および消費電力量の履歴を記憶媒体30から取得する。そして、当該走行履歴および消費電力量の履歴に基づいて充電池46の電力のみを利用して自車両を走行させる場合の単位電力量あたりの走行可能距離を取得する。さらに、制御部20は、充電池46から取得した残電力量と単位電力量あたりの走行可能距離とに基づいて走行可能距離を算出する。具体的には、走行可能距離は(残電力量)×(単位電力量あたりの走行可能距離)によって求められる。本実施形態において走行可能範囲は、地図上において自車両の現在位置を中心とし走行可能距離を半径とする円形の内側の領域(円周上を含む)であり、制御部20は、現在位置取得部21aの処理により取得された現在位置と算出された走行可能距離とに基づいて走行可能範囲を特定する。
【0032】
表示制御部21cは、ユーザI/F部48の表示部に地図を表示させるとともに、現在位置画像と走行可能範囲画像とを当該地図上に表示させる機能を制御部20に実現させるモジュールである。本実施形態においては、制御部20は、現在位置取得部21aの処理により取得された自車両の現在位置を示す情報を参照し、現在位置に対応する地図上の箇所に現在位置画像が表示されるようにユーザI/F部48に信号を出力する。本実施形態において現在位置画像は、縮尺毎に決定された大きさの円形により示され、当該円内に三角形が示される。同様に、制御部20は、走行可能範囲取得部21bの処理により取得された走行可能範囲を示す情報を取得し、当該情報に基づいて走行可能範囲画像(自車両の現在位置を中心とし走行可能距離を半径とする円形の画像)が地図上に表示されるようにユーザI/F部48に信号を出力する。
【0033】
画像比較部21dは、現在位置画像の大きさと走行可能範囲画像の大きさとを比較する機能を制御部20に実現させるモジュールである。制御部20は、表示制御部21cの処理により取得された現在位置画像を示す情報と走行可能範囲画像を示す情報とを取得し、両画像の大きさを比較する。すなわち、制御部20は、円形により示される現在位置画像の半径と現在位置画像の半径とを取得し、走行可能範囲画像の半径の現在位置画像の半径に対する比{(走行可能範囲画像の半径)/(現在位置画像の半径)}である画像比を算出する。算出された画像比を示す情報は、表示方法選択部21eに受け渡される。
【0034】
表示方法選択部21eは、自車両の現在位置と走行可能範囲とを識別可能に示すための表示方法を選択する機能を制御部20に実現させるモジュールである。画像比較部21dの処理により算出された画像比を参照し、あらかじめ設定された規則に基づいて当該画像比を判別する。制御部20は、判別結果に基づいて自車両の現在位置と走行可能範囲とを示すための表示方法を変更するか否かを判別する。表示方法を変更する必要があると判別された場合、制御部20は新たな表示方法を選択し、当該表示方法を示す情報が表示制御部21cに受け渡され、ユーザI/F部48の表示部における表示方法が変更される。
【0035】
(2)車載用表示制御処理:
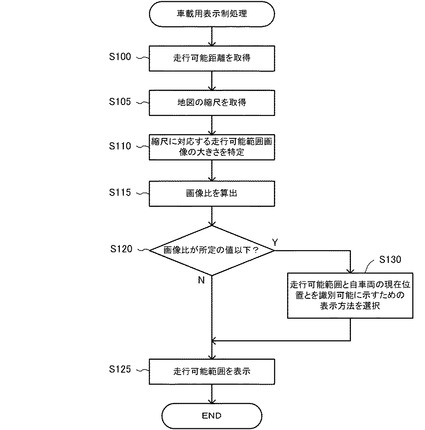
次に、以上の構成においてナビゲーション装置10が実施する車載用表示制御処理を説明する。図2は、車載用表示制御処理を示すフローチャートである。本実施形態では、ユーザI/F部48の表示部に地図とともに現在位置画像が既に表示されており、ユーザからの入力を受け付けた後に車載用表示制御処理を実行する場合について説明する。
【0036】
はじめに、制御部20は、自車両の単位電力量あたりの走行可能距離と充電池46から取得された残電力量とに基づいて走行可能距離を取得する(ステップS100)。具体的には、制御部20は、自車両の走行履歴および消費電力量の履歴を記憶媒体30から取得する。制御部20は、当該走行履歴および消費電力量の履歴に基づいて充電池46の電力のみを利用して自車両を走行させる場合の単位電力量あたりの走行可能距離を取得する。制御部20は、単位電力量あたりの走行可能距離と充電池46から取得された残電力量とに基づいて走行可能距離を取得する。すなわち、走行可能距離は(残電力量)×(単位電力量あたりの走行可能距離)によって求められる。なお、制御部20は、自車両に搭載された特定の装置から走行可能距離を直接取得してもよい。
【0037】
制御部20は、表示部に表示されている地図の縮尺を示す情報を取得する(ステップS105)。制御部20は、取得された地図の縮尺に対応する走行可能範囲画像の大きさを特定する(ステップS110)。すなわち、縮尺を示す情報とステップS100にて取得された走行可能距離とに基づいて、表示部に表示されている地図における当該走行可能距離の長さが特定される。走行可能範囲画像は走行可能距離を半径とする円形で示され、走行可能範囲画像の大きさは走行可能範囲画像の半径で示される。よって、地図上の走行可能距離の長さが特定されることで、当該地図の縮尺に対応する走行可能範囲画像の大きさが特定される。
【0038】
制御部20は、現在位置画像の大きさと走行可能範囲画像の大きさとを参照し、画像比を算出する(ステップS115)。画像比は、走行可能範囲画像の大きさの現在位置画像の大きさに対する比であり、(走行可能範囲画像の半径)/(現在位置画像の半径)で表される。なお、現在位置画像の大きさは縮尺毎に決められているため、現在位置画像の半径は、縮尺を示す情報に基づいて取得される。
【0039】
制御部20は、算出した画像比を参照し、当該画像比が所定の値以下であるか否かを判別する(ステップS120)。所定の値として、現在位置画像と走行可能範囲画像との識別が困難となる1.1〜1.2の間に設定することが好ましい。画像比が所定の値より大きいと判別された場合(ステップS120のN)、ステップS110にて特定した大きさの走行可能範囲画像を示す情報がユーザI/F部48の表示部に出力され、走行可能範囲が現在位置画像とともに表示される(ステップS125)。すなわち、画像比が所定の値以下でない場合には、ユーザが走行可能範囲画像と現在位置画像とを明確に識別できるため、ステップS110にて特定された走行可能範囲画像の大きさが変更されることなく表示部に表示される。
【0040】
一方、画像比が所定の値以下であると判別された場合(ステップS120のY)、制御部20は、走行可能範囲と自車両の現在位置とを表示部において識別可能な表示方法を選択する(ステップS130)。選択された表示方法に基づく走行可能範囲を示す情報がユーザI/F部48の表示部に出力され、走行可能範囲が現在位置に対して識別可能に表示される表示方法となる(ステップS125)。具体的には、表示部に表示される地図の縮尺は段階的に選択可能であり、制御部20は、地図上での走行可能距離の長さと現在位置画像の半径とを縮尺毎に取得する。制御部20は、取得された情報に基づいて縮尺毎に画像比を算出し、当該画像比が所定の値より大きくなる縮尺を特定する。制御部20は、当該縮尺にて現在位置画像と走行可能範囲画像とを表示部に表示させる。こうした処理によれば、走行可能範囲画像は縮尺の変更前に比べて大きく表示され、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できる。
【0041】
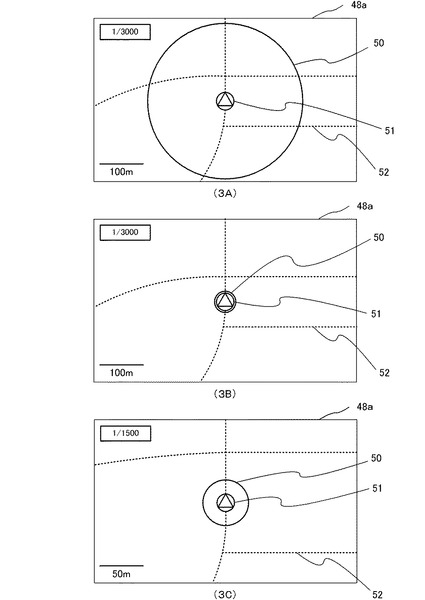
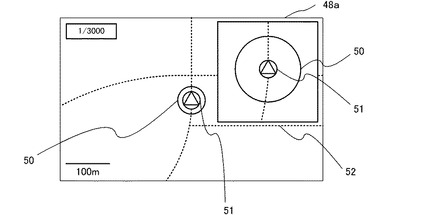
図3は、ステップS120〜S130における処理の一例を示す図である。図3A、図3Bおよび図3Cは、ユーザI/F部48の表示部に表示される画面48aを例示している。画面48a内の左上には、表示されている地図の縮尺が示されている。画面48a内の左下に示される線分は、当該縮尺における地図上での当該線分の距離を示している。図3Cの縮尺のみが図3Aおよび3Bと異なり、左下の線分が示す地図上での距離も異なる。画面48aの中心に表示され、三角形を内包する円形の画像が現在位置画像51である。現在位置画像51の周囲に表示される円形の画像が走行可能範囲画像50である。画面48aで破線により示されている画像が道路画像52である。
【0042】
図3Aは、S120にて画像比が所定の値より大きいと判別された結果、新たな表示方法が選択されることなく走行可能範囲が示された場合の画面48aを示す図である。現在位置画像51の半径に比べて走行可能範囲画像50の半径が十分に大きいため、ユーザは現在位置画像51と走行可能範囲画像50とを明確に識別できる。
【0043】
図3Bは、S120にて画像比が所定の値以下と判別される場合の画面48aを示す図である。ここでは説明のために図3Bを示しているが、画像比が所定の値以下である場合には新たな表示方法が選択されるため実際にはこのような画面がユーザI/F部48の表示部に表示されることはない。図3Bでは、現在位置画像51の半径に比べて走行可能範囲画像50の半径が十分に大きくないため、ユーザは現在位置画像51と走行可能範囲画像50とを明確に識別することが困難である。そのため、制御部20は、画像比が所定の値より大きくなるように地図の縮尺を切り替えてより狭域の地図を表示させる表示方法を選択する。その結果、表示部に表示される画面が図3Cであり、この表示方法を選択することによって現在位置と走行可能範囲とが常に識別可能に示される。すなわち、図3Cに示すようにより狭域の地図を表示させることにより走行可能範囲画像は縮尺の変更前に比べて大きく表示される。この結果、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できる。
【0044】
以上のように、画像比が所定の値以下である場合、自車両の現在位置と走行可能範囲とを識別可能に示すための表示方法が選択されることにより、ユーザは常に走行可能範囲を適確に認識できる。そのため、ユーザは、充電池の電力を用いてモータのみで走行するEVモードでの走行によって自車両がどこまで走行可能であるかを知ることができる。例えば、プラグインハイブリッド車両では、家庭等の身近な充電施設によって充電池を充電し、比較的短距離の区間をEVモードで走行することを繰り返すことでできるだけ内燃機関による燃料消費を抑制することが想定されている場合も多い。したがって、プラグインハイブリッド車両に本実施形態を適用すれば、内燃機関を燃料によって駆動することなく、充電池の残電力量のみでどこまで走行可能であるかを知ることができ、プラグインハイブリッド車両を利用する際の利便性を向上させることができる。
【0045】
(3)他の実施形態:
以上の実施形態は、本発明を実施するための一例であり、他にも種々の実施形態を採用可能である。例えば、上記実施形態ではハイブリッド自動車に適用される例を説明したが、充電池の電力にて駆動する電気自動車等に適用されてもよい。
【0046】
また、画像比が所定の値以下であるためより狭域の地図を表示させる表示方法が選択された後、充電池への充電により走行可能範囲が拡大した場合、地図の縮尺を変更前の縮尺に戻す構成を採用してもよい。具体的には、充電池への充電により走行可能距離が延びることで走行可能範囲画像の大きさが充電前より大きくなり、変更前の縮尺に戻して現在位置画像と走行可能範囲画像とを表示させたとしても画像比が所定の値より大きいことがある。すなわち、変更前の縮尺にて両画像を表示させたとしてもユーザは現在位置画像と走行可能範囲画像とを明確に識別できる場合である。このような場合、変更前の縮尺で示される表示方法が選択され、当該表示方法がユーザI/F部48の表示部に反映される。こうした構成によれば、ユーザが好みの縮尺で地図を表示部に表示していたにもかかわらず車載用表示制御処理により縮尺が変更された場合であっても、充電により画像比が所定の値より大きくなることで地図の縮尺がユーザ好みの縮尺へと自動的に切り替えられる。
【0047】
しかし、変更前の縮尺に戻すことで走行可能範囲画像全体が表示部に表示できない場合がある。例えば、充電池が十分に充電され、走行可能範囲画像が表示部の表示サイズよりも大きい場合である。このような場合、走行可能範囲画像と現在位置画像とを明確に識別することはできるが走行可能範囲画像の全体が表示部に表示されないため、ユーザは充電池の残電力量でどこまで走行可能であるかを適確に知ることができない。そのため、変更前の縮尺に戻す際、走行可能範囲画像全体が表示部に表示可能であるか否かを判別する構成を採用してもよい。表示可能である場合には変更前の縮尺に戻され、表示不可能である場合には走行可能範囲画像の全体が表示可能な縮尺に調整される。こうした構成によれば、地図の縮尺をユーザ好みの縮尺へと近づけるとともに充電池の残電力量でどこまで走行可能であるかを適確に知ることができる。
【0048】
また、画像比が所定の値以下である場合の表示方法の選択として、画像比を所定の値より大きくなるように現在位置画像の大きさを小さくさせる表示方法を採用してもよい。すなわち、現在位置画像の大きさは縮尺毎に固定されているが、画像比が所定の以下である場合には現在位置画像の大きさを変更することで走行可能範囲をユーザに明確に示す。具体的には、走行可能範囲画像の大きさを示す半径と所定の値とに基づいて画像比が所定の値より大きくなるように現在位置画像の大きさを示す半径を算出する。(走行可能範囲画像の半径)/(所定の値)を計算することにより画像比が所定の値と等しくなる現在位置画像の半径が算出され、算出された値より短くなるように現在位置画像の半径が特定される。
【0049】
さらに、画像比が所定の値より大きくなるように現在位置画像の大きさを小さくさせる表示方法が選択された後、充電池への充電により走行可能範囲が拡大した場合、現在位置画像の大きさを変更前の大きさに戻す表示方法を採用してもよい。具体的には、充電池への充電により走行可能範囲画像の大きさが充電前より大きくなり、現在位置画像の大きさを変更前に戻して表示させたとしても画像比が所定の値より大きいことがある。すなわち、変更前の大きさの現在位置画像を表示させたとしてもユーザは現在位置画像と走行可能範囲画像とを明確に識別できる場合である。このような場合、現在位置画像を変更前の大きさで表示する表示方法が選択され、ユーザI/F部48の表示部に反映される。こうした構成によれば、車載用表示制御処理により現在位置画像の大きさが変更された場合であっても現在位置画像の大きさを通常の大きさに戻すことができるため、現在位置画像の視認性が向上する。
【0050】
また、画像比が所定の値以下である場合の表示方法の選択として、ユーザI/F部48の表示部に既に表示されている地図(以下、単に「第1地図」という)とは縮尺の異なる第2地図に現在位置画像と走行可能範囲画像とを識別可能に表示させるとともに当該第2地図を第1地図とともに表示させる表示方法を採用してもよい。具体的には、第1地図の縮尺で走行可能範囲画像を表示させると画像比が所定の値以下になる場合に画像比が所定の値より大きくなるように第2地図の縮尺が決定される。決定された縮尺において現在位置画像と走行可能範囲画像とが識別可能に表示されるように第2地図のサイズが調整され、第1地図とともに表示される。すなわち、縮尺を切り替えてより狭域の地図を第2地図として表示させることで第2地図に表示される走行可能範囲画像の大きさを第1地図に表示される走行可能範囲画像の大きさより大きくする。
【0051】
こうした表示方法による画面の一例を図4に示す。ここでは、第2地図の表示とともに第1地図において走行可能範囲画像50が表示されているが、第1地図に走行可能範囲画像50が表示されないとしてもよい。図4では、画面48a内の右上に画像比が所定の値より大きくなるように縮尺が調整された第2地図が表示されている。こうした表示方法によれば、第2地図において現在位置画像と走行可能範囲画像とを明確に識別できるため、ユーザは走行可能範囲を適確に認識できる。
【0052】
また、画像比が所定の値以下である場合の表示方法の選択として、現在位置画像を透過させることで現在位置画像と走行可能範囲画像とを識別可能な表示方法を採用してもよい。画像比が所定の値以下である場合、走行可能範囲画像の大きさが現在位置画像の大きさより小さいことがある。例えば、走行可能範囲画像の半径が現在位置画像の半径よりも小さい場合である。このような場合、両画像が重複した部分については現在位置画像が走行可能範囲画像の上に表示されることで、現在位置画像が優先して表示される。よって、現在位置画像を透過させることで、自車両の現在位置と走行可能範囲とを識別可能に表示させる。こうした構成によれば、ユーザは走行可能範囲を適確に認識できる。なお、現在位置画像と走行可能範囲画像との重複部分では現在位置画像が優先して表示される設定を前提に説明したが、走行可能範囲画像が優先して表示される設定が採用されてもよい。
【0053】
さらに、画像比が所定の値以下である場合の表示方法の選択として、現在位置画像の表示態様によって走行可能範囲を示す表示方法を採用してもよい。具体的には、現在位置画像の表示態様を変更することにより現在位置画像のみで自車両の現在位置と走行可能範囲とを視覚的に表示させる。例えば、現在位置画像の色を画像比に応じて変更してもよいし、現在位置画像として採用される画像そのものを画像比に応じて変更してもよい。こうした表示方法によれば、ユーザは走行可能範囲の状況を現在位置画像の表示態様を通じて知ることができる。なお、走行可能範囲画像の大きさが現在位置画像の大きさより小さい場合、当該表示方法によれば表示部に表示されていない走行可能範囲の状況を知ることができる。
【0054】
さらに、現在位置画像の表示態様の変更後にユーザからの入力を受け付けた場合、上述したように第2地図を第1地図とともに表示させる表示方法を採用してもよい。具体的には、ユーザは現在位置画像の表示態様の変化を確認した後、ユーザI/F部48の画面上で現在位置画像に触れることによって表示方法を変更させる旨を入力する。当該入力を受けて、画像比が所定の値より大きくなるように第2地図の縮尺が決定され、第2地図が第1地図とともに表示部に表示される。こうした表示方法によれば、第2地図において走行可能範囲画像と現在位置画像とを明確に識別できるため、現在地画像の表示態様の変更により示される走行可能範囲の情報と比べてより多くの情報を得ることができる。
【0055】
図2のステップS100における走行可能距離の取得において、別の方法が用いられてもよい。すなわち、制御部20は、表示部の地図上に表示されている道路区間の勾配を地図情報30aから取得するとともに、自車両において道路区間を走行する際の車速を予測し、当該勾配の道路区間を当該車速で走行する際に必要なエネルギーを取得する。そして、充電池46によって電動機45を駆動(EVモードでの走行)して当該エネルギーを出力するために、充電池46で必要となる必要電力量を取得する。制御部20は、各道路区間の必要電力量と駆動制御ECU47が出力する残電力量とに基づいて自車両の現在位置から走行可能な距離を取得する。なお、自車両が過去に走行したことがある道路区間については、記憶媒体30に記憶されている走行履歴および消費電力量の履歴を参照し、当該道路区間を走行するための必要電力量を取得してもよい。
【0056】
車載用表示制御処理において、上述した表示方法を適宜組み合わせて用いてもよい。例えば、現在位置画像と走行可能範囲画像とのいずれか一方を透過させる表示方法において、ユーザからの入力に応じて第2地図を第1地図とともに表示させてもよい。さらに、車載用表示制御処理はユーザからの入力を受け付けた後に実行される処理として説明したが、車載用表示制御処理が一旦実行された後、所定の間隔ごとに車載用表示制御処理が自動的に繰り返される構成が採用されてもよい。こうした構成によれば、当該処理の実行のため一度入力をした後において更なる入力行為が必要とされることなく走行可能範囲を適確に認識できる。
【図面の簡単な説明】
【0057】
【図1】車載用表示制御装置を含むナビゲーション装置のブロック図である。
【図2】車載用表示制御処理のフローチャートである。
【図3】(3A)〜(3c)は表示部の画面例を示す図である。
【図4】表示部の画面例を示す図である。
【符号の説明】
【0058】
10…ナビゲーション装置、20…制御部、21…車載用表示制御プログラム、21a…現在位置取得部、21b…走行可能範囲取得部、21c…表示制御部、21d…画像比較部、21e…表示方法選択部、30…記憶媒体、30a…地図情報、40…GPS受信部、41…車速センサ、42…測距センサ、43…燃料タンク、44…内燃機関、45…電動機、46…充電池、47…駆動制御ECU、48…ユーザI/F部、50…走行可能範囲画像、51…現在位置画像、52…道路画像
【技術分野】
【0001】
本発明は、地図上に走行可能範囲を示す情報を表示する車載用表示制御装置、車載用表示制御方法および車載用表示制御プログラムに関する。
【背景技術】
【0002】
従来、充電池の電力にて走行する自車両において当該充電池の残電力量に応じた走行可能範囲を自車両の現在位置とともに表示部に表示する技術が知られている(例えば、特許文献1参照)。具体的には、充電池の残電力量に応じた車両の登坂能力と道路地図上における各道路の地形情報とを考慮して車両の走行可能距離を求め、求められた当該走行可能距離に基づいて走行可能範囲を地図上に表示している。
【特許文献1】特許第3177806号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の技術では、充電池の残電力量に応じた走行可能範囲を示す画像(以下、単に「走行可能範囲画像」という)は、自車両の現在位置を起点とした範囲を示している。この構成において表示部に表示される地図の縮尺を切り替えてより広域の地図を表示すると、走行可能範囲画像の大きさは表示部の画面上において縮尺変更前に比べて小さくなる。そのため、地図の縮尺によっては、走行可能範囲画像と自車両の現在位置を示す画像(以下、単に「現在位置画像」という)とが重なり、両者を明確に識別することが困難である。
【0004】
また、充電池の残電力量を利用して自車両で走行すると、走行に伴う残電力量の減少により走行可能範囲が狭くなることで走行可能範囲画像の大きさが小さくなり、走行可能範囲画像と現在位置画像とを明確に識別することが困難になる。
本発明は、上記課題にかんがみてなされたもので、走行可能範囲をユーザに対して明確に示すことが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、表示部に地図を表示させるとともに、自車両の現在位置を示す現在位置画像と走行可能範囲を示す走行可能範囲画像とを地図上に表示させ、走行可能範囲画像の大きさと現在位置画像の大きさとを比較する。そして、比較の結果に基づいて、自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法を選択する。
【0006】
走行可能範囲画像は走行可能範囲を示しているため充電池の残電力量または縮尺の変更によりその大きさが変動し得る。しかし、現在位置画像は自車両の現在位置を示しているため、走行可能範囲画像のように充電池の残電力量に応じてその大きさが変動しない。そのため、充電池の残電力量によっては現在位置画像と走行可能範囲画像とが重なり、両画像を明確に識別できなくなる。そこで、表示部において自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択すると、走行可能範囲をユーザに対して明確に示すことができる。
【0007】
ここで、現在位置取得手段は、自車両の現在位置を示す情報を取得することができればよく種々の構成を採用可能である。例えば、GPSからの信号に基づいて自車両の現在位置を特定する構成や、自車両の位置をセンサやカメラによって特定する構成や、地図上での自車両の軌跡、車車間通信、路車間通信等に基づいて自車両の位置を特定する構成等を採用可能である。
【0008】
走行可能範囲取得手段は、自車両に搭載された充電池の残電力量で自車両を走行させることが可能な走行可能範囲を取得することができればよく種々の構成を採用可能である。例えば、各道路区間における車速や勾配等のパラメータと自車両の重量とに基づいて各道路区間を走行するための必要電力量を算出し、当該必要電力量と充電池の残電力量とに基づいて走行可能範囲を取得してもよい。また、自車両の過去の走行履歴と消費電力量の履歴と充電池の残電力量とに基づいて走行可能範囲を取得する構成を採用してもよい。また、自車両に搭載された、車載用表示制御装置とは異なる装置から走行可能距離を取得し、当該走行可能距離に基づいて走行可能範囲を決定する構成を採用してもよい。
【0009】
表示制御手段は、表示部に地図を表示させるとともに、自車両の現在位置を示す現在位置画像と走行可能範囲を示す走行可能範囲画像とを当該地図上に表示させることができればよい。現在位置画像は、自車両の現在位置を視覚的に示すための画像であればよく、例えば矢印、記号、文字などにより表示されてもよい。なお、現在位置画像は大きさが固定された画像あるいは地図の縮尺毎に大きさが固定された画像であることが好ましい。走行可能範囲画像は、現在位置を起点とした走行可能範囲を大きさによって示す画像であることが好ましく、例えば、充電池の残電力量によって現在位置から走行可能な限界地点を地図上の道路に示すことで表示されてもよい。また、走行可能範囲画像は、自車両の現在位置を中心とする、走行可能な距離によって大きさが変化する特定の図形(例えば走行可能距離によって半径が変化する円形)によって表示されてもよい。さらに、地図上の道路に沿って延びる、走行可能距離に対応する長さの線分によって走行可能範囲を表示してもよく、種々の構成を採用可能である。
【0010】
さらに、表示制御手段は、現在位置画像と走行可能範囲画像とのいずれか一方の画像を他方の画像の上に表示させてもよい。走行可能範囲が狭い場合、現在位置画像と走行可能範囲画像とを表示部に表示させようとすると両画像に表示上の重複部分が存在することがある。そのため、当該重複部分については、いずれか一方の画像を他方の画像の上に表示させることで当該一方の画像を優先して表示させる。
【0011】
画像比較手段は、現在位置画像の大きさと走行可能範囲画像の大きさとを比較することができればよく種々の構成を採用可能である。画像の大きさは、画像の面積によって決定されてもよいし、画像の径によって決定されてもよい。また、画像の中心と当該中心から当該画像上の最も離れた点との距離によって決定されてもよい。
【0012】
また、画像比較手段は、走行可能範囲画像の大きさの現在位置画像の大きさに対する比(以下、単に「画像比」という)を取得することができるとしてもよい。画像比は、ユーザが表示部上において走行可能範囲を明確に認識できるか否かを評価できる指標であればよく、(走行可能範囲画像の大きさ)/(現在位置画像の大きさ)で表される。
【0013】
表示方法選択手段は、自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法を選択することができればよく種々の構成を採用可能である。すなわち、現在位置画像の大きさと走行可能範囲画像の大きさとの比較結果を参照し、あらかじめ設定された規則に基づいて自車両の現在位置と走行可能範囲とを示すための表示方法を変更するか否かを判別する。変更する必要があると判別された場合に自車両の現在位置と走行可能範囲とを表示部において識別可能な表示方法が選択される。
【0014】
表示方法とは、現在位置を示す画像を現在位置画像として画面上で表現し、走行可能範囲を示す走行可能範囲画像を画面上で表現するための方法である。表示方法は、表示方法選択手段によって新たな表示方法が選択されることにより変更される。変更前の表示方法においては、現在位置画像と走行可能範囲画像との関係によって表示方法を選択しないためそれぞれが独立に変動し、走行可能範囲を適確に認識できなくなることが生じ得る。そのため、変更後の表示方法は自車両の現在位置と走行可能範囲とを識別可能に示すことにより走行可能範囲をユーザに対して明確に示すことができる方法であればよい。
【0015】
さらに、表示方法選択手段は、地図の縮尺を決定する表示方法を選択してもよい。すなわち、走行可能範囲画像の大きさは地図の縮尺に応じて変化するため、画像比が所定の値以下である(現在位置画像と走行可能範囲画像とを明確に識別することが困難である)場合、画像比が所定の値より大きくなるように地図の縮尺を決定する表示方法を選択する。具体的には、画像比を所定の値より大きくするために地図の縮尺を切り替えてより狭域の地図を表示させる。
【0016】
所定の値は、現在位置画像と走行可能範囲画像とを表示部上において明確に識別することが困難になる値としてあらかじめ決められた値であればよい。例えば、走行可能範囲画像が円形で示される場合、当該走行可能範囲画像の円周部と現在位置画像の輪郭とが重なり始める際の画像比を採用してもよい。自車両の走行可能範囲を示す円周部が現在位置画像と重なると、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できないことがあるからである。なお、所定の値は、ユーザによって任意に決定されてもよい。この場合、両画像を明確に識別できなくなる画像比をユーザが実際に確認した上で決定できるため、ユーザごとの主観を反映した設定が可能である。
【0017】
さらに、表示方法選択手段は、画像比が所定の値より大きくなるように現在位置画像の大きさを決定する表示方法を選択してもよい。こうした表示方法によれば、現在位置画像と走行可能範囲画像とを適確に識別できる。なお、現在位置画像の大きさは、固定された大きさあるいは地図の縮尺に対してあらかじめ決められた大きさであることが好ましい。こうした構成において画像比が所定の値以下である場合、画像比が所定の値より大きくなるように現在位置画像の大きさが変更され、走行可能範囲が明確に示される。具体的には、画像比を所定の値より大きくするために現在位置画像の大きさを変更前の大きさより小さくする必要がある。現在位置画像の変更の際に地図の縮尺は変更されないため、走行可能範囲画像の大きさはほとんど変化しない。そのため、画像比の算出において分母に該当する現在位置画像の大きさを小さくすることで画像比を所定の値より大きくし得る。
【0018】
さらに、表示方法選択手段は、表示部に既に表示されている地図とは縮尺が異なる第2地図に現在位置画像と走行可能範囲画像とを同時に表示させるとともに当該第2地図を既に表示されている地図とともに表示させる表示方法を選択してもよい。すなわち、現在位置画像と走行可能範囲画像との比較結果を参照し、既に表示されている地図において両画像を明確に識別できないと判別される場合には第2地図上に現在位置画像と走行可能範囲画像とを識別可能に示す。このような構成を採用することでユーザは走行可能範囲を適確に認識できる。
【0019】
さらに、表示方法選択手段は、現在位置画像と走行可能範囲画像とが表示部において重複部分を有する場合に上に表示させた画像を透過させる表示方法を選択してもよい。重複部分については、上に表示されている一方の画像を透過させることにより他方の画像をユーザが視認できるようにする。このような構成によれば、ユーザは走行可能範囲を適確に認識できるため、充電池の残電力量でどこまで走行可能かを知ることができる。
【0020】
なお、本発明のように地図上に表示される自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【発明を実施するための最良の形態】
【0021】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)車載用表示制御装置の構成:
(2)車載用表示制御処理:
(3)他の実施形態:
【0022】
(1)車載用表示制御装置の構成:
図1は、自車両に搭載された車載用表示制御装置の構成を示すブロック図である。本実施形態において車載用表示制御装置は、ナビゲーション装置10によって実現される。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20と記憶媒体30とを備えており、記憶媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムの一つとして車載用表示制御プログラム21を実行可能であり、当該車載用表示制御プログラム21はその機能として地図上に表示される自車両の現在位置と走行可能範囲とを識別可能に示す表示方法を選択する機能を備えている。
【0023】
本実施形態における自車両(ナビゲーション装置10が搭載された車両)は、車載用表示制御プログラム21による機能を実現するためにGPS受信部40と車速センサ41と加速度センサ42と燃料タンク43と内燃機関44と電動機45と充電池46と駆動制御ECU47とユーザI/F48部とを備えており、これらの各部と制御部20とが協働することによって車載用表示制御プログラム21による機能を実現する。
【0024】
GPS受信部40は、GPS衛星からの電波を受信し、図示しないインタフェースを介して自車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して自車両の現在位置および現在時刻を取得する。車速センサ41は、自車両が備える車輪の回転速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得し、自車両の速度を取得する。
【0025】
加速度センサ42は自車両に作用する加速度に対応した信号を出力する。制御部20は、図示しないインタフェースを介してこの信号を取得する。車速センサ41や加速度センサ42は、各センサの出力信号が示す情報を取得するために利用されるとともに、GPS受信部40の出力信号から特定される自車両の現在位置を補正するためにも利用される。むろん、自車両の現在位置を取得するための構成は上述の構成に限られず、ジャイロセンサ等を利用して自車両の動作を取得する構成を採用してもよいし、車速センサ41やジャイロセンサ等の出力信号や自車両の軌跡に基づいて現在位置を補正する構成を採用してもよい。なお、自車両の動作を示す情報を取得するための構成は、ほかにも種々の構成を採用可能であり、自車両の現在位置をセンサやカメラによって特定する構成や、GPSからの信号や地図上での車両の軌跡、車車間通信、路車間通信等によって自車両の動作情報を取得する構成等を採用可能である。
【0026】
本実施形態の自車両は、駆動源として、燃料タンク43に蓄積された燃料を動力源とする内燃機関44と、充電池46を動力源とする電動機45とを備えたハイブリッド車両である。これらの内燃機関44と電動機45とは図示しない動力伝達機構に連結されており、当該動力伝達機構により回転駆動力を車両の推進力に変換することによって自車両を駆動させる。自車両は、内燃機関44と電動機45とのいずれかまたは双方によって駆動することができる。また、内燃機関44によって発生した回転駆動力の一部を回生エネルギーとして電動機45に伝達するように構成されており、この際に電動機45によって発電された電力は充電池46に蓄積される。
【0027】
内燃機関44と電動機45は、駆動制御ECU47に制御される。駆動制御ECU47は、内燃機関44と電動機45とに対して制御信号を出力可能であり、内燃機関44と電動機45とに対して制御信号を出力して内燃機関44と電動機45とのいずれかまたは双方が回転駆動力を発生させるように制御する。したがって、本実施形態においては、駆動制御ECU47が出力する制御信号によって内燃機関44の駆動や停止、電動機45による充電、充電池46の放電による電動機45の駆動が選択される。また、駆動制御ECU47は、充電池46から残電力量[%](SOC:State Of Charge)を取得して制御部20に通知する。なお、充電池46の現在の残電力量は、残電力量に対応した充電池46に関する各種のパラメータによって取得することが可能であり、SOCの他、電圧、電流、電解質のpH等によって残電力量を特定してもよい。
【0028】
ユーザI/F部48は、ユーザが指示を入力し、またはユーザに各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。また、制御部20は、ユーザI/F部48の表示部を介して自車両の現在位置や走行可能範囲をユーザに案内することができる。
【0029】
制御部20は、車載用表示制御プログラムを実行することにより、地図上に表示される自車両の現在位置と走行可能範囲とを識別可能な表示方法を選択する処理を行う。そのため、車載用表示制御プログラム21は、現在位置取得部21aと走行可能範囲取得部21bと表示制御部21cと画像比較部21dと表示方法選択部21eとを備えており、記憶媒体30にはあらかじめ地図情報30aが記憶されている。地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ、ノード間の道路の形状を特定するための形状補間データ、ノード同士の連結を示すリンクデータ、道路の勾配を示す勾配データ、自車両の走行履歴および消費電力量の履歴等を含み、自車両の現在位置の特定や当該現在位置からの走行可能範囲を特定する際等に利用される。
【0030】
現在位置取得部21aは、自車両の現在位置を示す情報を取得する機能を制御部20に実現させるモジュールであり、制御部20は、現在位置取得部21aの処理により、GPS受信部40の出力信号が示す自車両の現在位置を示す情報を取得する。なお、制御部20は、車速センサ41が出力する出力信号を取得し、また、地図情報30aを参照して地図上での自車両の軌跡を基に自車両の現在位置を適宜補正する。現在位置を示す情報は、走行可能距離取得部21bや表示制御部21cに受け渡される。
【0031】
走行可能範囲取得部21bは、自車両に搭載された充電池の残電力量で自車両を走行させることが可能な走行可能範囲を取得する機能を制御部20に実現させるモジュールである。制御部20は、走行中に走行履歴と消費電力量の履歴とを取得して記憶媒体30に記録しており、走行可能範囲を取得するにあたり、制御部20は、当該走行履歴および消費電力量の履歴を記憶媒体30から取得する。そして、当該走行履歴および消費電力量の履歴に基づいて充電池46の電力のみを利用して自車両を走行させる場合の単位電力量あたりの走行可能距離を取得する。さらに、制御部20は、充電池46から取得した残電力量と単位電力量あたりの走行可能距離とに基づいて走行可能距離を算出する。具体的には、走行可能距離は(残電力量)×(単位電力量あたりの走行可能距離)によって求められる。本実施形態において走行可能範囲は、地図上において自車両の現在位置を中心とし走行可能距離を半径とする円形の内側の領域(円周上を含む)であり、制御部20は、現在位置取得部21aの処理により取得された現在位置と算出された走行可能距離とに基づいて走行可能範囲を特定する。
【0032】
表示制御部21cは、ユーザI/F部48の表示部に地図を表示させるとともに、現在位置画像と走行可能範囲画像とを当該地図上に表示させる機能を制御部20に実現させるモジュールである。本実施形態においては、制御部20は、現在位置取得部21aの処理により取得された自車両の現在位置を示す情報を参照し、現在位置に対応する地図上の箇所に現在位置画像が表示されるようにユーザI/F部48に信号を出力する。本実施形態において現在位置画像は、縮尺毎に決定された大きさの円形により示され、当該円内に三角形が示される。同様に、制御部20は、走行可能範囲取得部21bの処理により取得された走行可能範囲を示す情報を取得し、当該情報に基づいて走行可能範囲画像(自車両の現在位置を中心とし走行可能距離を半径とする円形の画像)が地図上に表示されるようにユーザI/F部48に信号を出力する。
【0033】
画像比較部21dは、現在位置画像の大きさと走行可能範囲画像の大きさとを比較する機能を制御部20に実現させるモジュールである。制御部20は、表示制御部21cの処理により取得された現在位置画像を示す情報と走行可能範囲画像を示す情報とを取得し、両画像の大きさを比較する。すなわち、制御部20は、円形により示される現在位置画像の半径と現在位置画像の半径とを取得し、走行可能範囲画像の半径の現在位置画像の半径に対する比{(走行可能範囲画像の半径)/(現在位置画像の半径)}である画像比を算出する。算出された画像比を示す情報は、表示方法選択部21eに受け渡される。
【0034】
表示方法選択部21eは、自車両の現在位置と走行可能範囲とを識別可能に示すための表示方法を選択する機能を制御部20に実現させるモジュールである。画像比較部21dの処理により算出された画像比を参照し、あらかじめ設定された規則に基づいて当該画像比を判別する。制御部20は、判別結果に基づいて自車両の現在位置と走行可能範囲とを示すための表示方法を変更するか否かを判別する。表示方法を変更する必要があると判別された場合、制御部20は新たな表示方法を選択し、当該表示方法を示す情報が表示制御部21cに受け渡され、ユーザI/F部48の表示部における表示方法が変更される。
【0035】
(2)車載用表示制御処理:
次に、以上の構成においてナビゲーション装置10が実施する車載用表示制御処理を説明する。図2は、車載用表示制御処理を示すフローチャートである。本実施形態では、ユーザI/F部48の表示部に地図とともに現在位置画像が既に表示されており、ユーザからの入力を受け付けた後に車載用表示制御処理を実行する場合について説明する。
【0036】
はじめに、制御部20は、自車両の単位電力量あたりの走行可能距離と充電池46から取得された残電力量とに基づいて走行可能距離を取得する(ステップS100)。具体的には、制御部20は、自車両の走行履歴および消費電力量の履歴を記憶媒体30から取得する。制御部20は、当該走行履歴および消費電力量の履歴に基づいて充電池46の電力のみを利用して自車両を走行させる場合の単位電力量あたりの走行可能距離を取得する。制御部20は、単位電力量あたりの走行可能距離と充電池46から取得された残電力量とに基づいて走行可能距離を取得する。すなわち、走行可能距離は(残電力量)×(単位電力量あたりの走行可能距離)によって求められる。なお、制御部20は、自車両に搭載された特定の装置から走行可能距離を直接取得してもよい。
【0037】
制御部20は、表示部に表示されている地図の縮尺を示す情報を取得する(ステップS105)。制御部20は、取得された地図の縮尺に対応する走行可能範囲画像の大きさを特定する(ステップS110)。すなわち、縮尺を示す情報とステップS100にて取得された走行可能距離とに基づいて、表示部に表示されている地図における当該走行可能距離の長さが特定される。走行可能範囲画像は走行可能距離を半径とする円形で示され、走行可能範囲画像の大きさは走行可能範囲画像の半径で示される。よって、地図上の走行可能距離の長さが特定されることで、当該地図の縮尺に対応する走行可能範囲画像の大きさが特定される。
【0038】
制御部20は、現在位置画像の大きさと走行可能範囲画像の大きさとを参照し、画像比を算出する(ステップS115)。画像比は、走行可能範囲画像の大きさの現在位置画像の大きさに対する比であり、(走行可能範囲画像の半径)/(現在位置画像の半径)で表される。なお、現在位置画像の大きさは縮尺毎に決められているため、現在位置画像の半径は、縮尺を示す情報に基づいて取得される。
【0039】
制御部20は、算出した画像比を参照し、当該画像比が所定の値以下であるか否かを判別する(ステップS120)。所定の値として、現在位置画像と走行可能範囲画像との識別が困難となる1.1〜1.2の間に設定することが好ましい。画像比が所定の値より大きいと判別された場合(ステップS120のN)、ステップS110にて特定した大きさの走行可能範囲画像を示す情報がユーザI/F部48の表示部に出力され、走行可能範囲が現在位置画像とともに表示される(ステップS125)。すなわち、画像比が所定の値以下でない場合には、ユーザが走行可能範囲画像と現在位置画像とを明確に識別できるため、ステップS110にて特定された走行可能範囲画像の大きさが変更されることなく表示部に表示される。
【0040】
一方、画像比が所定の値以下であると判別された場合(ステップS120のY)、制御部20は、走行可能範囲と自車両の現在位置とを表示部において識別可能な表示方法を選択する(ステップS130)。選択された表示方法に基づく走行可能範囲を示す情報がユーザI/F部48の表示部に出力され、走行可能範囲が現在位置に対して識別可能に表示される表示方法となる(ステップS125)。具体的には、表示部に表示される地図の縮尺は段階的に選択可能であり、制御部20は、地図上での走行可能距離の長さと現在位置画像の半径とを縮尺毎に取得する。制御部20は、取得された情報に基づいて縮尺毎に画像比を算出し、当該画像比が所定の値より大きくなる縮尺を特定する。制御部20は、当該縮尺にて現在位置画像と走行可能範囲画像とを表示部に表示させる。こうした処理によれば、走行可能範囲画像は縮尺の変更前に比べて大きく表示され、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できる。
【0041】
図3は、ステップS120〜S130における処理の一例を示す図である。図3A、図3Bおよび図3Cは、ユーザI/F部48の表示部に表示される画面48aを例示している。画面48a内の左上には、表示されている地図の縮尺が示されている。画面48a内の左下に示される線分は、当該縮尺における地図上での当該線分の距離を示している。図3Cの縮尺のみが図3Aおよび3Bと異なり、左下の線分が示す地図上での距離も異なる。画面48aの中心に表示され、三角形を内包する円形の画像が現在位置画像51である。現在位置画像51の周囲に表示される円形の画像が走行可能範囲画像50である。画面48aで破線により示されている画像が道路画像52である。
【0042】
図3Aは、S120にて画像比が所定の値より大きいと判別された結果、新たな表示方法が選択されることなく走行可能範囲が示された場合の画面48aを示す図である。現在位置画像51の半径に比べて走行可能範囲画像50の半径が十分に大きいため、ユーザは現在位置画像51と走行可能範囲画像50とを明確に識別できる。
【0043】
図3Bは、S120にて画像比が所定の値以下と判別される場合の画面48aを示す図である。ここでは説明のために図3Bを示しているが、画像比が所定の値以下である場合には新たな表示方法が選択されるため実際にはこのような画面がユーザI/F部48の表示部に表示されることはない。図3Bでは、現在位置画像51の半径に比べて走行可能範囲画像50の半径が十分に大きくないため、ユーザは現在位置画像51と走行可能範囲画像50とを明確に識別することが困難である。そのため、制御部20は、画像比が所定の値より大きくなるように地図の縮尺を切り替えてより狭域の地図を表示させる表示方法を選択する。その結果、表示部に表示される画面が図3Cであり、この表示方法を選択することによって現在位置と走行可能範囲とが常に識別可能に示される。すなわち、図3Cに示すようにより狭域の地図を表示させることにより走行可能範囲画像は縮尺の変更前に比べて大きく表示される。この結果、ユーザは現在位置画像と走行可能範囲画像とを明確に識別できる。
【0044】
以上のように、画像比が所定の値以下である場合、自車両の現在位置と走行可能範囲とを識別可能に示すための表示方法が選択されることにより、ユーザは常に走行可能範囲を適確に認識できる。そのため、ユーザは、充電池の電力を用いてモータのみで走行するEVモードでの走行によって自車両がどこまで走行可能であるかを知ることができる。例えば、プラグインハイブリッド車両では、家庭等の身近な充電施設によって充電池を充電し、比較的短距離の区間をEVモードで走行することを繰り返すことでできるだけ内燃機関による燃料消費を抑制することが想定されている場合も多い。したがって、プラグインハイブリッド車両に本実施形態を適用すれば、内燃機関を燃料によって駆動することなく、充電池の残電力量のみでどこまで走行可能であるかを知ることができ、プラグインハイブリッド車両を利用する際の利便性を向上させることができる。
【0045】
(3)他の実施形態:
以上の実施形態は、本発明を実施するための一例であり、他にも種々の実施形態を採用可能である。例えば、上記実施形態ではハイブリッド自動車に適用される例を説明したが、充電池の電力にて駆動する電気自動車等に適用されてもよい。
【0046】
また、画像比が所定の値以下であるためより狭域の地図を表示させる表示方法が選択された後、充電池への充電により走行可能範囲が拡大した場合、地図の縮尺を変更前の縮尺に戻す構成を採用してもよい。具体的には、充電池への充電により走行可能距離が延びることで走行可能範囲画像の大きさが充電前より大きくなり、変更前の縮尺に戻して現在位置画像と走行可能範囲画像とを表示させたとしても画像比が所定の値より大きいことがある。すなわち、変更前の縮尺にて両画像を表示させたとしてもユーザは現在位置画像と走行可能範囲画像とを明確に識別できる場合である。このような場合、変更前の縮尺で示される表示方法が選択され、当該表示方法がユーザI/F部48の表示部に反映される。こうした構成によれば、ユーザが好みの縮尺で地図を表示部に表示していたにもかかわらず車載用表示制御処理により縮尺が変更された場合であっても、充電により画像比が所定の値より大きくなることで地図の縮尺がユーザ好みの縮尺へと自動的に切り替えられる。
【0047】
しかし、変更前の縮尺に戻すことで走行可能範囲画像全体が表示部に表示できない場合がある。例えば、充電池が十分に充電され、走行可能範囲画像が表示部の表示サイズよりも大きい場合である。このような場合、走行可能範囲画像と現在位置画像とを明確に識別することはできるが走行可能範囲画像の全体が表示部に表示されないため、ユーザは充電池の残電力量でどこまで走行可能であるかを適確に知ることができない。そのため、変更前の縮尺に戻す際、走行可能範囲画像全体が表示部に表示可能であるか否かを判別する構成を採用してもよい。表示可能である場合には変更前の縮尺に戻され、表示不可能である場合には走行可能範囲画像の全体が表示可能な縮尺に調整される。こうした構成によれば、地図の縮尺をユーザ好みの縮尺へと近づけるとともに充電池の残電力量でどこまで走行可能であるかを適確に知ることができる。
【0048】
また、画像比が所定の値以下である場合の表示方法の選択として、画像比を所定の値より大きくなるように現在位置画像の大きさを小さくさせる表示方法を採用してもよい。すなわち、現在位置画像の大きさは縮尺毎に固定されているが、画像比が所定の以下である場合には現在位置画像の大きさを変更することで走行可能範囲をユーザに明確に示す。具体的には、走行可能範囲画像の大きさを示す半径と所定の値とに基づいて画像比が所定の値より大きくなるように現在位置画像の大きさを示す半径を算出する。(走行可能範囲画像の半径)/(所定の値)を計算することにより画像比が所定の値と等しくなる現在位置画像の半径が算出され、算出された値より短くなるように現在位置画像の半径が特定される。
【0049】
さらに、画像比が所定の値より大きくなるように現在位置画像の大きさを小さくさせる表示方法が選択された後、充電池への充電により走行可能範囲が拡大した場合、現在位置画像の大きさを変更前の大きさに戻す表示方法を採用してもよい。具体的には、充電池への充電により走行可能範囲画像の大きさが充電前より大きくなり、現在位置画像の大きさを変更前に戻して表示させたとしても画像比が所定の値より大きいことがある。すなわち、変更前の大きさの現在位置画像を表示させたとしてもユーザは現在位置画像と走行可能範囲画像とを明確に識別できる場合である。このような場合、現在位置画像を変更前の大きさで表示する表示方法が選択され、ユーザI/F部48の表示部に反映される。こうした構成によれば、車載用表示制御処理により現在位置画像の大きさが変更された場合であっても現在位置画像の大きさを通常の大きさに戻すことができるため、現在位置画像の視認性が向上する。
【0050】
また、画像比が所定の値以下である場合の表示方法の選択として、ユーザI/F部48の表示部に既に表示されている地図(以下、単に「第1地図」という)とは縮尺の異なる第2地図に現在位置画像と走行可能範囲画像とを識別可能に表示させるとともに当該第2地図を第1地図とともに表示させる表示方法を採用してもよい。具体的には、第1地図の縮尺で走行可能範囲画像を表示させると画像比が所定の値以下になる場合に画像比が所定の値より大きくなるように第2地図の縮尺が決定される。決定された縮尺において現在位置画像と走行可能範囲画像とが識別可能に表示されるように第2地図のサイズが調整され、第1地図とともに表示される。すなわち、縮尺を切り替えてより狭域の地図を第2地図として表示させることで第2地図に表示される走行可能範囲画像の大きさを第1地図に表示される走行可能範囲画像の大きさより大きくする。
【0051】
こうした表示方法による画面の一例を図4に示す。ここでは、第2地図の表示とともに第1地図において走行可能範囲画像50が表示されているが、第1地図に走行可能範囲画像50が表示されないとしてもよい。図4では、画面48a内の右上に画像比が所定の値より大きくなるように縮尺が調整された第2地図が表示されている。こうした表示方法によれば、第2地図において現在位置画像と走行可能範囲画像とを明確に識別できるため、ユーザは走行可能範囲を適確に認識できる。
【0052】
また、画像比が所定の値以下である場合の表示方法の選択として、現在位置画像を透過させることで現在位置画像と走行可能範囲画像とを識別可能な表示方法を採用してもよい。画像比が所定の値以下である場合、走行可能範囲画像の大きさが現在位置画像の大きさより小さいことがある。例えば、走行可能範囲画像の半径が現在位置画像の半径よりも小さい場合である。このような場合、両画像が重複した部分については現在位置画像が走行可能範囲画像の上に表示されることで、現在位置画像が優先して表示される。よって、現在位置画像を透過させることで、自車両の現在位置と走行可能範囲とを識別可能に表示させる。こうした構成によれば、ユーザは走行可能範囲を適確に認識できる。なお、現在位置画像と走行可能範囲画像との重複部分では現在位置画像が優先して表示される設定を前提に説明したが、走行可能範囲画像が優先して表示される設定が採用されてもよい。
【0053】
さらに、画像比が所定の値以下である場合の表示方法の選択として、現在位置画像の表示態様によって走行可能範囲を示す表示方法を採用してもよい。具体的には、現在位置画像の表示態様を変更することにより現在位置画像のみで自車両の現在位置と走行可能範囲とを視覚的に表示させる。例えば、現在位置画像の色を画像比に応じて変更してもよいし、現在位置画像として採用される画像そのものを画像比に応じて変更してもよい。こうした表示方法によれば、ユーザは走行可能範囲の状況を現在位置画像の表示態様を通じて知ることができる。なお、走行可能範囲画像の大きさが現在位置画像の大きさより小さい場合、当該表示方法によれば表示部に表示されていない走行可能範囲の状況を知ることができる。
【0054】
さらに、現在位置画像の表示態様の変更後にユーザからの入力を受け付けた場合、上述したように第2地図を第1地図とともに表示させる表示方法を採用してもよい。具体的には、ユーザは現在位置画像の表示態様の変化を確認した後、ユーザI/F部48の画面上で現在位置画像に触れることによって表示方法を変更させる旨を入力する。当該入力を受けて、画像比が所定の値より大きくなるように第2地図の縮尺が決定され、第2地図が第1地図とともに表示部に表示される。こうした表示方法によれば、第2地図において走行可能範囲画像と現在位置画像とを明確に識別できるため、現在地画像の表示態様の変更により示される走行可能範囲の情報と比べてより多くの情報を得ることができる。
【0055】
図2のステップS100における走行可能距離の取得において、別の方法が用いられてもよい。すなわち、制御部20は、表示部の地図上に表示されている道路区間の勾配を地図情報30aから取得するとともに、自車両において道路区間を走行する際の車速を予測し、当該勾配の道路区間を当該車速で走行する際に必要なエネルギーを取得する。そして、充電池46によって電動機45を駆動(EVモードでの走行)して当該エネルギーを出力するために、充電池46で必要となる必要電力量を取得する。制御部20は、各道路区間の必要電力量と駆動制御ECU47が出力する残電力量とに基づいて自車両の現在位置から走行可能な距離を取得する。なお、自車両が過去に走行したことがある道路区間については、記憶媒体30に記憶されている走行履歴および消費電力量の履歴を参照し、当該道路区間を走行するための必要電力量を取得してもよい。
【0056】
車載用表示制御処理において、上述した表示方法を適宜組み合わせて用いてもよい。例えば、現在位置画像と走行可能範囲画像とのいずれか一方を透過させる表示方法において、ユーザからの入力に応じて第2地図を第1地図とともに表示させてもよい。さらに、車載用表示制御処理はユーザからの入力を受け付けた後に実行される処理として説明したが、車載用表示制御処理が一旦実行された後、所定の間隔ごとに車載用表示制御処理が自動的に繰り返される構成が採用されてもよい。こうした構成によれば、当該処理の実行のため一度入力をした後において更なる入力行為が必要とされることなく走行可能範囲を適確に認識できる。
【図面の簡単な説明】
【0057】
【図1】車載用表示制御装置を含むナビゲーション装置のブロック図である。
【図2】車載用表示制御処理のフローチャートである。
【図3】(3A)〜(3c)は表示部の画面例を示す図である。
【図4】表示部の画面例を示す図である。
【符号の説明】
【0058】
10…ナビゲーション装置、20…制御部、21…車載用表示制御プログラム、21a…現在位置取得部、21b…走行可能範囲取得部、21c…表示制御部、21d…画像比較部、21e…表示方法選択部、30…記憶媒体、30a…地図情報、40…GPS受信部、41…車速センサ、42…測距センサ、43…燃料タンク、44…内燃機関、45…電動機、46…充電池、47…駆動制御ECU、48…ユーザI/F部、50…走行可能範囲画像、51…現在位置画像、52…道路画像
【特許請求の範囲】
【請求項1】
自車両の現在位置を示す情報を取得する現在位置取得手段と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得手段と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御手段と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較手段と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択手段と、
を備える車載用表示制御装置。
【請求項2】
前記画像比較手段は、前記走行可能範囲画像の大きさの前記現在位置画像の大きさに対する比を取得し、
前記表示方法選択手段は、前記比が所定の値より大きくなるように前記地図の縮尺を決定する表示方法を選択する、
請求項1に記載の車載用表示制御装置。
【請求項3】
前記画像比較手段は、前記走行可能範囲画像の大きさの前記現在位置画像の大きさに対する比を取得し、
前記表示方法選択手段は、前記比が所定の値より大きくなるように前記現在位置画像の大きさを決定する表示方法を選択する、
請求項1に記載の車載用表示制御装置。
【請求項4】
前記表示制御手段は、前記現在位置画像と前記走行可能範囲画像とのいずれか一方の画像を他方の画像の上に表示させ、
前記表示方法選択手段は、上に表示させた画像を透過させる表示方法を選択する、
請求項1〜請求項3のいずれかに記載の車載用表示制御装置。
【請求項5】
自車両の現在位置を示す情報を取得する現在位置取得工程と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得工程と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御工程と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較工程と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択工程と、
を含む車載用表示制御方法。
【請求項6】
自車両の現在位置を示す情報を取得する現在位置取得機能と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得機能と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御機能と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較機能と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択機能と、をコンピュータに実現させる車載用表示制御プログラム。
【請求項1】
自車両の現在位置を示す情報を取得する現在位置取得手段と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得手段と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御手段と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較手段と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択手段と、
を備える車載用表示制御装置。
【請求項2】
前記画像比較手段は、前記走行可能範囲画像の大きさの前記現在位置画像の大きさに対する比を取得し、
前記表示方法選択手段は、前記比が所定の値より大きくなるように前記地図の縮尺を決定する表示方法を選択する、
請求項1に記載の車載用表示制御装置。
【請求項3】
前記画像比較手段は、前記走行可能範囲画像の大きさの前記現在位置画像の大きさに対する比を取得し、
前記表示方法選択手段は、前記比が所定の値より大きくなるように前記現在位置画像の大きさを決定する表示方法を選択する、
請求項1に記載の車載用表示制御装置。
【請求項4】
前記表示制御手段は、前記現在位置画像と前記走行可能範囲画像とのいずれか一方の画像を他方の画像の上に表示させ、
前記表示方法選択手段は、上に表示させた画像を透過させる表示方法を選択する、
請求項1〜請求項3のいずれかに記載の車載用表示制御装置。
【請求項5】
自車両の現在位置を示す情報を取得する現在位置取得工程と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得工程と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御工程と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較工程と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択工程と、
を含む車載用表示制御方法。
【請求項6】
自車両の現在位置を示す情報を取得する現在位置取得機能と、
前記自車両に搭載された充電池の残電力量で前記自車両を走行させることが可能な走行可能範囲を取得する走行可能範囲取得機能と、
表示部に地図を表示させるとともに、前記自車両の現在位置を示す現在位置画像と前記走行可能範囲を示す走行可能範囲画像とを前記地図上に表示させる表示制御機能と、
前記現在位置画像の大きさと前記走行可能範囲画像の大きさとを比較する画像比較機能と、
前記比較の結果に基づいて、前記自車両の現在位置と前記走行可能範囲とを前記表示部において識別可能な表示方法を選択する表示方法選択機能と、をコンピュータに実現させる車載用表示制御プログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−139386(P2010−139386A)
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願番号】特願2008−316165(P2008−316165)
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年6月24日(2010.6.24)
【国際特許分類】
【出願日】平成20年12月11日(2008.12.11)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]