
車載用装置
【課題】車両を駐車する際、前進および後進を繰り返し行っても、車両の後方を撮影した画像を表示し続けることができる車載用装置を提供する。
【解決手段】車載用装置に、制御ユニット1と、車両の後方を撮像するカメラ2と、車両の後部から所定範囲にある物体を検知するソナーセンサ3と、ディスプレイ6とを設ける。制御ユニット1は、車両のギアのポジションを判定する手段を有し、ギアがリバースにあると判定した場合、カメラ2が撮影した車両後方の画像をディスプレイ6に表示し、ギアがリバースではないと判定した場合、カメラ6が撮影した画像以外の情報をディスプレイ6に表示する。また、制御ユニット1は、ギアがリバースからリバース以外に変更したと判定した場合であっても、ソナーセンサ3が車両の後部から所定範囲に物体があることを検知している間は、カメラ2が撮影した画像をディスプレイ6に表示する。
【解決手段】車載用装置に、制御ユニット1と、車両の後方を撮像するカメラ2と、車両の後部から所定範囲にある物体を検知するソナーセンサ3と、ディスプレイ6とを設ける。制御ユニット1は、車両のギアのポジションを判定する手段を有し、ギアがリバースにあると判定した場合、カメラ2が撮影した車両後方の画像をディスプレイ6に表示し、ギアがリバースではないと判定した場合、カメラ6が撮影した画像以外の情報をディスプレイ6に表示する。また、制御ユニット1は、ギアがリバースからリバース以外に変更したと判定した場合であっても、ソナーセンサ3が車両の後部から所定範囲に物体があることを検知している間は、カメラ2が撮影した画像をディスプレイ6に表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されたカメラを利用して車両の後方確認を行う車載用装置の技術に関する。
【背景技術】
【0002】
従来から、車両を駐車する際の運転を支援するために、車両の後部にカメラを設置し、車室内にモニタを配置し、カメラにより自車の後方を撮影し、それをディスプレイに表示するシステムが知られている。例えば、特許文献1には、テレビチューナで受信した画像と、カメラが撮影した車両後方の画像とを切換えてディスプレイに表示するシステムが開示されている。特許文献1のシステムでは、車両のバックギアが操作されている間、すなわち、車両がバック運転されている間は、自動的にカメラが撮影した車両後方の画像をディスプレイに表示し、それ以外の場合には、テレビチューナが受信した画像を表示するようにしている。このようにすることにより、運転者は、カメラが撮影した車両後方の画像を確認しながらバック運転ができるようになる。
【0003】
【特許文献1】実開平6−74499号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されているような従来技術は、以下の問題を有している。具体的には、従来技術では、車両がバック運転をされていると、すなわち、車両のギアのポジションがリバースになると、カメラが撮影した画像をディスプレイに表示する。一方、車両がバック運転をやめると、すなわち、車両のギアのポジションがリバースから解除されると、元の画面(例えば、テレビチューナが受信したテレビ番組画面)に復帰するようにしている。そして、車庫入れ等の場合のように、切り返しによって前進と後進とが短時間のうちに繰り返し行われると、ディスプレイの表示も車両の後方画像および元画面(例えば、テレビチューナが受信したテレビ番組画面)が、前進および後進の切り換えに応じて目まぐるしく切り換わることになり、車両の後方画像の視認性の面で好ましくない。
【0005】
また、駐車場等には、車両の後方に壁等の障害物があることが多い。そして、車両を一旦駐車したとしても、車両後方のハッチを開けたい等の理由により、その駐車した位置からもう少し前に車両を移動させたいことがある。上記の従来技術では、ギアのポジションに連動して、ディスプレイの表示画面は、カメラが撮影した画像から元の画像に切り換わってしまう。そのため、車両を前進するつもりでギアを前に入れた場合に、ディスプレイ上に画像で後方を確認しようとすれば、再度ギアがリバースポジションになるように操作しなければならず不便である。
【0006】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、駐車場に車両を駐車する際に、前進および後進を繰り返し行っても、車両の後方を撮影した画像を表示し続けることができる車載用装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一態様は、画像を表示するディスプレイを備え、該ディスプレイに各種情報を表示する車載用装置に適用される。
【0008】
そして、前記車載用装置は、車両の後部に設置されて該車両の後方を撮像するカメラと、車両のギアのポジションを判定する判定手段と、車両の後部から所定距離の範囲にある物体を検知する検知手段と、前記判定手段が、前記ギアのポジションがリバースであると判定した場合、該カメラが撮影した車両後方の画像を取得して前記ディスプレイに表示し、前記ギアのポジションがリバースではないと判定した場合、該カメラが撮影した画像以外の他の情報を前記ディスプレイに表示する制御手段と、を備え、前記制御手段は、前記判定手段が、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であっても、前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間は、該カメラが撮影した車両後方の画像をディスプレイに表示する。
【発明の効果】
【0009】
このように本発明では、ギアポジションがリバースからリバース以外の位置に移行した場合であっても、検知手段が車両の後部から所定距離の範囲にある物体を検知している間は、カメラが撮影した車両後方の画像をディスプレイに表示するようにしている。そのため、車両の後方側に壁等の障害物がある駐車場に、車両を駐車した場合において、その駐車した位置から少し前に車両を移動させる場合、ディスプレイに車両後方の画像を表示し続けることができる。すなわち、本発明では、駐車場で車両を前に移動させる場合に、車両後方の画像を表示させるために、ギアをリバースにする必要はない。
【0010】
また、本発明によれば、車両の後方側に壁等の障害物がある駐車場に車両を駐車する際、切り返しによって前進と後進とが短時間のうちに繰り返し行われても、車両の後方画像と、その他画像とが、前進と後進との繰り返しに応じて切り換わることがない。そのため、運転者の後方画像の視認性を向上させることができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態について図面を用いて説明する。
【0012】
最初に本発明の一実施形態が適用された車載用装置の概略構成について図1を用いて説明する。なお、本実施形態では、車載用装置として、カーナビゲーション装置の機能を備えるものを例として説明する。
【0013】
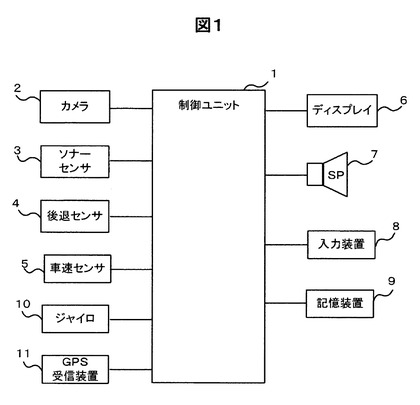
図1は、本発明の実施形態が適用された車載用装置の概略構成図である。
【0014】
図示するように、車載用装置は、装置全体の動作を制御する制御ユニット1と、車両の後部に設置され、車両後方を撮影するカメラ2と、車両後方にある障害物等の物体を検知するソナーセンサ3と、車両のギアのポジションがリバースに位置するか否かを検知する後退センサ4と、車速センサ5と、画像を表示するディスプレイ6と、音声等の音情報を出力するスピーカ7と、入力装置8と、地図データを記憶する記憶装置9と、ジャイロ10と、GPS(Global Positioning System)受信装置11と、を有する。
【0015】
制御ユニット1は、車載用装置が利用者に提供する各種情報を処理するための中心的ユニットである。例えば、制御ユニット1は、車両が車庫入れを行う場合に、カメラ2が撮影した車両後方の画像をディスプレイ6に表示する。また、制御ユニット1は、車速センサ5、ジャイロ10、およびGPS受信装置11からの情報を利用して、車両の現在位置を算出し、記憶装置9から読み出した地図上に現在位置を示した地図画像を生成して、ディスプレイ6に表示する。
【0016】
カメラ2は、カラービデオカメラであり、撮影レンズとCCD撮像素子と前処理部およびA/Dコンバータ等から構成される。カメラ2は、車両後部のルーフ中央部またはトランクリッド等の車両後部に取り付けられている。そして、カメラ2は、制御ユニットに制御されて駆動し、車両の後方を撮影した画像を制御ユニット1に送信する。
【0017】
ソナーセンサ3は、車両の後部(リアバンパー等)に取り付けられていて、車両の後部から所定距離の範囲にある物体を検知する。ソナーセンサ3は、物体を検知すると、その旨を示す信号を制御ユニット1に出力する。なお、本実施形態では、ソナーセンサ3を利用するが、これは例示に過ぎない。車両の後部から所定距離の範囲にある物体を検知することができるセンサであればよい。
【0018】
後退センサ4は、車両のギアのポジションがリバースであるか否かを判定するために利用する信号を検出する。例えば、後退センサ4は、車両のギアのシフトレバーのシフト位置を検出し、その検出したシフト位置を制御ユニット1に出力するように構成されていてもよい。また、後退センサ4は、バックアップランプに供給される電流または電圧を検出し、検出した場合には、検出した旨を示す信号を制御ユニット1に出力するように構成されていてもよい。
【0019】
車速センサ5、ジャイロ10、GPS受信装置11は、ナビゲーション装置が現在位置を算出するために使用するものである。
【0020】
車速センサ5は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。ジャイロ10は、光ファイバジャイロや振動ジャイロで構成され、車両(移動体)が回転した角度を検出する。GPS受信装置11は、GPS衛星からの信号(GPS信号)を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0021】
ディスプレイ6は、制御ユニット1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。
【0022】
スピーカ7は、制御ユニット1からの音声情報(例えば、利用者へのメッセージ)等を受け付けて、その音声情報を出力する。
【0023】
入力装置8は、車載用装置の各種機能選択、目的地設定等の利用者からの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ6上に貼られたタッチパネルなどで構成される。
【0024】
記憶装置9は、地図データを記憶するユニットである。なお、記憶装置9には、例えば、DVD装置やハードディスク装置を用いることができる。記憶装置9に記憶されている地図データは、地図を複数に分割することで得られるメッシュ領域毎に分類されている。また、地図データには、各メッシュ領域に含まれる道路を構成する各リンクのリンクデータが含まれている。
【0025】
続いて、上述した車載用装置の制御ユニット1が有する特徴的な機能について図2を用いて説明する。
【0026】
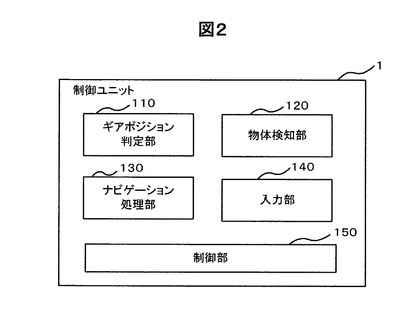
図2は、本実施形態の制御ユニット1の機能ブロック図である。
【0027】
図示するように、制御ユニット1は、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150を有する。
【0028】
ギアポジション判定部110は、後退センサ4からの信号を利用して、車両のギアがリバースのポジションにあるか否かを判定する。例えば、後退センサ4に、バックアップランプに供給される電流または電圧を検出するセンサを用いる場合には以下のように判定する。すなわち、ギアポジション判定部110は、後退センサ4からの信号を受信している間は、車両のギアがリバースのポジションにあると判定する。一方、ギアポジション判定部110は、後退センサ4からの信号を受信していない場合、車両のギアがリバースのポジションにはないと判定する。ギアポジション判定部110は、ギアがリバース以外からリバースのポジションに変更されたと判定した場合には、その旨を制御部150に通知する。
【0029】
物体検知部120は、ソナーセンサ3からの信号を利用して、車両の後方の所定領域内に壁等の障害物があるか否かを判定する。具体的には、ソナーセンサ3は、車両(車両の後部)から所定距離の範囲内にある壁等の障害物を検知すると、物体検知部120に信号を出力する。物体検知部120は、ソナーセンサ3からの信号を受信している場合、車両の後方の所定領域に壁等の障害物があると判定する。一方、物体検知部120は、ソナーセンサ3からの信号を受信していない場合には、車両の後方の所定領域に壁等の障害物がないと判定する。
【0030】
ナビゲーション処理部130は、一般的なカーナビゲーション装置の機能を提供する。ナビゲーション処理部130は、車速センサ5、ジャイロ10、およびGPS受信装置11からの信号を利用して車両の現在位置を算出する。ナビゲーション処理部130は、算出した現在地位周辺の地図データを記憶装置9から読み出して、地図上に現在位置を示した地図画像を生成して、制御部100を介して、ディスプレイ6に表示する。また、ナビゲーション処理部130は、入力装置8を介して、ユーザから受け付けた目的地までの推奨経路を探索して、ユーザに提示したり、探索した推奨経路を利用してユーザを誘導する。なお、ナビゲーション処理部130の機能は、既存の技術により実現可能である。
【0031】
制御部150は、ディスプレイ6が行う表示処理を制御する。具体的には、制御部150は、ギアポジション判定部110が、車両のギアのポジションがリバースの位置にあると判定した場合に、カメラ2を制御して、車両の後方を撮影させる。カメラ2は、撮影した車両後方の画像を制御部150に出力する。制御部150は、カメラ2からの車両後方の画像を受信し、受信した画像をディスプレイ6に表示する。また、制御部150は、ギアポジション判定部110が、車両のギアのポジションがリバースではないと判定している場合、ナビゲーション処理部130に、地図上に現在位置を示した地図画像を生成させ、その生成させた地図画像をディスプレイ6に表示する。
【0032】
さらに、本実施形態の制御部150は、車両のギアがリバースからリバース以外のポジションに変化した場合であっても、物体検知部120が、車両の後部から所定距離の範囲内に物体があると判定している間は、ディスプレイ6に表示する画像を、車両の後方の画像から地図画像に切り換えず、車両の後方の画像を表示し続ける。
【0033】
なお、上述した制御ユニット1の各機能部(ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150)は、ソフトウェアにより実現されてもいいし、各機能部を実行するために専用に設計された回路(ASIC(Application Specific Integrated Circuit)等)により実現されてもよい。
【0034】
例えば、制御ユニット1の各機能部をソフトウェアにより実現する場合、制御ユニット1には、CPU(Central Processing Unit)と、メモリと、カメラ2との間で行われるデータ送受信を制御するインタフェースと、各センサ(3、4、5、10)からのデータを受け付けるインタフェースと、ディスプレイ6、スピーカ7、入力装置8、記憶装置9、およびGPS受信装置11との間で行われるデータの送受信を制御するインタフェースとを備える情報処理装置を用いることができる。
【0035】
この場合、メモリに、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150の機能を実現するためのプログラムを記憶させておく。そして、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150の機能は、CPUがメモリに記憶されている上記のプログラムを実行することにより実現される。
【0036】
続いて、本実施形態の車載用装置が行う、車両の後方を撮影した画像をディスプレイ6に表示する処理について、図3および4を用いて説明する。
【0037】
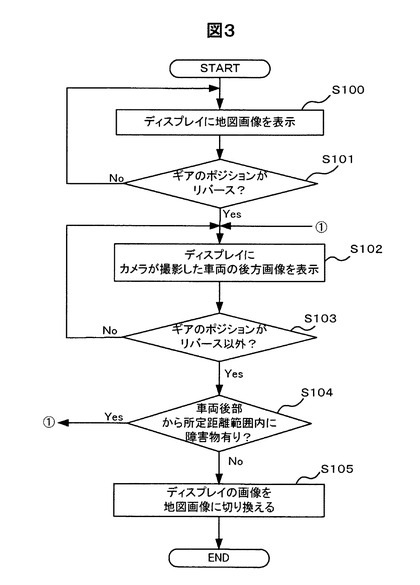
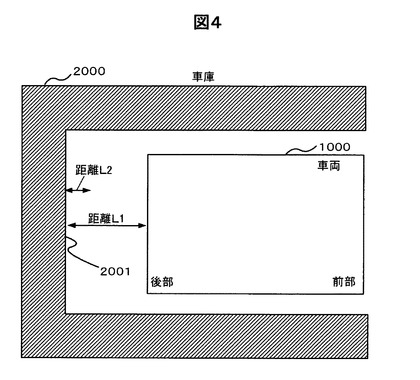
図3は、本実施形態の車載用装置が行う、車両の後方画像を表示する処理のフロー図である。図4は、車両と車庫との位置の概略を示した図である。なお、図3のフローは、車両のギアポジションがリバースではない状態で開始される例を示している。
【0038】
車両のギアがリバースポジションではない場合(例えば、車両が前進している場合)には、ギアポジション判定部110は、後退センサ4からの出力により、車両のギアがリバースポジションではないと判定する。制御部150は、ギアポジション判定部110の判定結果にしたがい、ナビゲーション処理部130に地図画像を生成させて、ディスプレイ6に地図画像を表示する(S10)。
【0039】
つぎに、制御部150は、車両のギアがリバースギアに入れられたか否かを監視し、車両のギアがリバースギアに入れられた場合には、S102の処理に進み、ギアがリバース以外のポジションにあれば、S100に戻る(S11)。
【0040】
具体的には、ギアポジション判定部110は、後退センサ4が出力する信号により、ギアのポジションがリバース以外からリバースに変更されたと判定した場合、その旨を制御部150に通知する。制御部150は、ギアポジション判定部110からの上記通知(ギアのポジションがリバース以外からリバースに変更されたことの通知)を受けると、S102に進む。制御部150は、ギアポジション判定部110からの上記通知(ギアのポジションがリバース以外からリバースに変更されたことの通知)を受けなければ、地図画像の表示を続ける(すなわち、S100に戻る)。
【0041】
S102では、制御部150は、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示する。具体的には、制御部150は、カメラ2を駆動させ、カメラ2に車両の後方を撮影させる。カメラ2は、撮影した車両後方の画像を制御部150に出力する。制御部150は、カメラ2からの車両後方の画像を受信し、受信した画像をディスプレイ6に表示する。
【0042】
つぎに、制御部150は、車両のギアがリバース以外のポジションに変更されたか否かを監視して、リバース以外のポジションに変更された場合、S104に進み、リバースポジションであればS102の処理に戻る(S103)。
【0043】
具体的には、制御部150は、ギアポジション判定部110にギアの状態を問い合わせる。ギアポジション判定部110は、上記の問い合わせに応答して、ギア状態を判定し、判定結果を制御部150に通知する。制御部150は、ギアポジション判定部110からの通知が「ギアがリバース以外のポジションにある旨」を示す場合、S104に進む。制御部150は、ギアポジション判定部110からの通知が「ギアがリバースのポジションにある旨」を示す場合、S102に戻る。
【0044】
S104では、制御部150は、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを判定し、障害物があれば、S102の処理に戻り、障害物がなければS105に進む。
【0045】
具体的には、制御部150は、物体検知部120に、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを問い合わせる。物体検知部120は、上記の問い合わせに応答して、ソナーセンサ3の出力の有無から、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを判定し、その判定結果を制御部150に通知する。制御部150は、物体検知部120からの通知が「障害物がある旨」を示す場合、S102に戻り、「障害物がない旨」を示す場合、S105の処理に進む。
【0046】
ここで、所定距離が「L1m」である場合の例を図4に示す。なお、図中の、2000は車庫を示し、1000は車両を示している。そして、車載用装置は、車両1000の後方から「L1m」以内に壁面2001がある場合、ギアポジションがリバースからリバース以外のポジションに変更された場合でも、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示する。一方、車両後方が、壁面2001から「L1m」より離れた場合には、ディスプレイ6に、ナビゲーション処理部130が生成した地図画像を表示する。
【0047】
このようにするのは以下のような場合に便利だからである。例えば、車両1000をバックさせて、図示する「L2(L2<L1)」の位置に止めたとする。その後、ユーザが、車両後方のハッチを開けたい等の理由により、その止めた位置から少し前に車両1000を移動さようとしたとする。この場合、本実施形態では、前進させるためにギアを前に入れても、車両後方が、壁面2001から「L1m」より離れるまでは、ディスプレイ6に車両後方の画像が表示されるので、後方の距離を簡単に確認できる。
【0048】
なお、本実施形態では、所定距離「L1」について特に限定しない。例えば、所定距離「L1」として、車両後方のハッチを開けても、ハッチが壁面2001に当たらない程度の長さとしてもよい。或いは、駐車する際の切り替えし運転を考慮した上で、所定距離「L1」を定めるようにしてもよい。また、ユーザ(或いは、車載用装置のディーラ)が、所定距離「L1」を車載用装置に設定できるようにしてもよい。このようにしておけば、車載用装置を車両に取り付ける車種に対応した所定距離「L1」を車載用装置に設定できる。また、ユーザの利用する駐車場に応じて所定距離「L1」を制御ユニット1に設定できる。
【0049】
図3に戻り、説明を続ける。S105では、制御部150は、ディスプレイ6の画像を、ナビゲーション処理部130が生成した地図画像に切り換えて処理を終了する。具体的には、制御部150は、ナビゲーション処理部130に地図画像を生成させて、ディスプレイ6の表示を車両の後方を撮影した画像から、生成させた地図画像に変更する。そして、制御部150は、カメラ2の駆動を停止する。
【0050】
このように、本実施形態では、ギアのポジションがリバースに入ると、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示するようにしている。そして、車両の後部から所定範囲内に障害物がない領域に車両が位置している場合において、ギアのポジションをリバースからリバース以外のポジションに変更した場合、自動的に、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしている。一方、車両の後部から所定範囲内に障害物がある領域に車両が位置している場合、ギアのポジションをリバースからリバース以外のポジションに変更してもディスプレイ6に、カメラ2が撮影した車両後方の画像を表示し続けるようにしている。
【0051】
そのため、本実施形態によれば、車両の後方に壁等の障害物がある駐車場に車両を駐車する際、前進と後進とが繰り返し行われても、車両の後方画像と、地図画像とが、前進と後進との繰り返しに応じて切り換わることがない。そのため、運転者の後方画像の視認性を向上させることができる。
【0052】
なお、本発明は、以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。
【0053】
例えば、図3に示すフローでは、ギアのポジションがリバースからリバース以外のポジションに変更されて、且つ車両の後部から所定距離の範囲内に壁等の障害物が無い場合に、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしているが特にこれに限定するものではない。
【0054】
入力装置8に、ディスプレイ6の表示切替え指示を受け付けるボタンを設けておき、そのボタンが操作されると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしてもよい(入力装置5がディスプレイ6上に設けられたタッチパネルの場合には、タッチパネル上の所定の領域をユーザが触ると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換える)。すなわち、この場合、制御ユニット1は、ギアポジションがリバースからリバース以外のポジションに変更され、且つ車両の後部から所定距離の範囲内に障害物がある場合であっても、入力装置8を介して、ユーザからの表示切替え指示を受け付けると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換える。
【0055】
また、例えば、車載用装置にタイマ機能を設けておいて、制御ユニット1は、ギアポジションがリバースからリバース以外のポジションに変更されると、タイマ機能を利用して、時間の計測を開始する。制御ユニット1は、リバースからリバース以外のポジションに変更されてから所定時間経過すると、車両の後部から所定距離の範囲内に障害物がある場合であっても、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしてもよい。
【0056】
また、例えば、ソナーセンサ3を利用しないで、ギアポジションがリバースからリバース以外のポジションに変更された場合であっても、所定時間経過するまでは、車両後方の画像を表示し続けるようにしてもよい。この場合には、ユーザからの表示切替え指示を受け付けた際、或いは、車速センサ5からの速度(前進方向の速度)が所定以上のときに、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにすればよい。
【0057】
また、上記実施形態では、地図画像と車両後方画像をと切り替える場合について説明したがこれは例示に過ぎない。例えば、車載用装置にテレビ放送を受信するテレビアンテナと、テレビアンテナに接続されたテレビチューナとを設けておいて、上記の地図画像の表示に代えて、ディスプレイ6に、テレビチューナで受信した画像情報(テレビ番組)を表示するようにしてもよい。或いは、上記の地図画像の表示に代えて、車載用装置に接続した外部機器(例えば、DVD再生装置)から取得した画像情報を表示するようにしてもよい。
【図面の簡単な説明】
【0058】
【図1】本発明の実施形態が適用された車載用装置の概略構成図である。
【図2】本発明の実施形態の制御ユニット1の機能ブロック図である。
【図3】本発明の実施形態の車載用装置が行う、車両の後方画像を表示する処理のフロー図である。
【図4】車両と車庫との位置の概略を示した図である。
【符号の説明】
【0059】
1…制御ユニット、2…カメラ、3…ソナーセンサ、4…後退センサ、5…車速センサ、6…ディスプレイ、7…スピーカ、8…入力装置、9…記憶装置、10…ジャイロ、11…GPS受信装置、110…ギアポジション判定部、120…物体検知部、130…ナビゲーション処理部、140…入力部、150…制御部
【技術分野】
【0001】
本発明は、車両に搭載されたカメラを利用して車両の後方確認を行う車載用装置の技術に関する。
【背景技術】
【0002】
従来から、車両を駐車する際の運転を支援するために、車両の後部にカメラを設置し、車室内にモニタを配置し、カメラにより自車の後方を撮影し、それをディスプレイに表示するシステムが知られている。例えば、特許文献1には、テレビチューナで受信した画像と、カメラが撮影した車両後方の画像とを切換えてディスプレイに表示するシステムが開示されている。特許文献1のシステムでは、車両のバックギアが操作されている間、すなわち、車両がバック運転されている間は、自動的にカメラが撮影した車両後方の画像をディスプレイに表示し、それ以外の場合には、テレビチューナが受信した画像を表示するようにしている。このようにすることにより、運転者は、カメラが撮影した車両後方の画像を確認しながらバック運転ができるようになる。
【0003】
【特許文献1】実開平6−74499号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されているような従来技術は、以下の問題を有している。具体的には、従来技術では、車両がバック運転をされていると、すなわち、車両のギアのポジションがリバースになると、カメラが撮影した画像をディスプレイに表示する。一方、車両がバック運転をやめると、すなわち、車両のギアのポジションがリバースから解除されると、元の画面(例えば、テレビチューナが受信したテレビ番組画面)に復帰するようにしている。そして、車庫入れ等の場合のように、切り返しによって前進と後進とが短時間のうちに繰り返し行われると、ディスプレイの表示も車両の後方画像および元画面(例えば、テレビチューナが受信したテレビ番組画面)が、前進および後進の切り換えに応じて目まぐるしく切り換わることになり、車両の後方画像の視認性の面で好ましくない。
【0005】
また、駐車場等には、車両の後方に壁等の障害物があることが多い。そして、車両を一旦駐車したとしても、車両後方のハッチを開けたい等の理由により、その駐車した位置からもう少し前に車両を移動させたいことがある。上記の従来技術では、ギアのポジションに連動して、ディスプレイの表示画面は、カメラが撮影した画像から元の画像に切り換わってしまう。そのため、車両を前進するつもりでギアを前に入れた場合に、ディスプレイ上に画像で後方を確認しようとすれば、再度ギアがリバースポジションになるように操作しなければならず不便である。
【0006】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、駐車場に車両を駐車する際に、前進および後進を繰り返し行っても、車両の後方を撮影した画像を表示し続けることができる車載用装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一態様は、画像を表示するディスプレイを備え、該ディスプレイに各種情報を表示する車載用装置に適用される。
【0008】
そして、前記車載用装置は、車両の後部に設置されて該車両の後方を撮像するカメラと、車両のギアのポジションを判定する判定手段と、車両の後部から所定距離の範囲にある物体を検知する検知手段と、前記判定手段が、前記ギアのポジションがリバースであると判定した場合、該カメラが撮影した車両後方の画像を取得して前記ディスプレイに表示し、前記ギアのポジションがリバースではないと判定した場合、該カメラが撮影した画像以外の他の情報を前記ディスプレイに表示する制御手段と、を備え、前記制御手段は、前記判定手段が、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であっても、前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間は、該カメラが撮影した車両後方の画像をディスプレイに表示する。
【発明の効果】
【0009】
このように本発明では、ギアポジションがリバースからリバース以外の位置に移行した場合であっても、検知手段が車両の後部から所定距離の範囲にある物体を検知している間は、カメラが撮影した車両後方の画像をディスプレイに表示するようにしている。そのため、車両の後方側に壁等の障害物がある駐車場に、車両を駐車した場合において、その駐車した位置から少し前に車両を移動させる場合、ディスプレイに車両後方の画像を表示し続けることができる。すなわち、本発明では、駐車場で車両を前に移動させる場合に、車両後方の画像を表示させるために、ギアをリバースにする必要はない。
【0010】
また、本発明によれば、車両の後方側に壁等の障害物がある駐車場に車両を駐車する際、切り返しによって前進と後進とが短時間のうちに繰り返し行われても、車両の後方画像と、その他画像とが、前進と後進との繰り返しに応じて切り換わることがない。そのため、運転者の後方画像の視認性を向上させることができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態について図面を用いて説明する。
【0012】
最初に本発明の一実施形態が適用された車載用装置の概略構成について図1を用いて説明する。なお、本実施形態では、車載用装置として、カーナビゲーション装置の機能を備えるものを例として説明する。
【0013】
図1は、本発明の実施形態が適用された車載用装置の概略構成図である。
【0014】
図示するように、車載用装置は、装置全体の動作を制御する制御ユニット1と、車両の後部に設置され、車両後方を撮影するカメラ2と、車両後方にある障害物等の物体を検知するソナーセンサ3と、車両のギアのポジションがリバースに位置するか否かを検知する後退センサ4と、車速センサ5と、画像を表示するディスプレイ6と、音声等の音情報を出力するスピーカ7と、入力装置8と、地図データを記憶する記憶装置9と、ジャイロ10と、GPS(Global Positioning System)受信装置11と、を有する。
【0015】
制御ユニット1は、車載用装置が利用者に提供する各種情報を処理するための中心的ユニットである。例えば、制御ユニット1は、車両が車庫入れを行う場合に、カメラ2が撮影した車両後方の画像をディスプレイ6に表示する。また、制御ユニット1は、車速センサ5、ジャイロ10、およびGPS受信装置11からの情報を利用して、車両の現在位置を算出し、記憶装置9から読み出した地図上に現在位置を示した地図画像を生成して、ディスプレイ6に表示する。
【0016】
カメラ2は、カラービデオカメラであり、撮影レンズとCCD撮像素子と前処理部およびA/Dコンバータ等から構成される。カメラ2は、車両後部のルーフ中央部またはトランクリッド等の車両後部に取り付けられている。そして、カメラ2は、制御ユニットに制御されて駆動し、車両の後方を撮影した画像を制御ユニット1に送信する。
【0017】
ソナーセンサ3は、車両の後部(リアバンパー等)に取り付けられていて、車両の後部から所定距離の範囲にある物体を検知する。ソナーセンサ3は、物体を検知すると、その旨を示す信号を制御ユニット1に出力する。なお、本実施形態では、ソナーセンサ3を利用するが、これは例示に過ぎない。車両の後部から所定距離の範囲にある物体を検知することができるセンサであればよい。
【0018】
後退センサ4は、車両のギアのポジションがリバースであるか否かを判定するために利用する信号を検出する。例えば、後退センサ4は、車両のギアのシフトレバーのシフト位置を検出し、その検出したシフト位置を制御ユニット1に出力するように構成されていてもよい。また、後退センサ4は、バックアップランプに供給される電流または電圧を検出し、検出した場合には、検出した旨を示す信号を制御ユニット1に出力するように構成されていてもよい。
【0019】
車速センサ5、ジャイロ10、GPS受信装置11は、ナビゲーション装置が現在位置を算出するために使用するものである。
【0020】
車速センサ5は、車輪の円周と計測される車輪の回転数から距離を測定し、さらに対となる車輪の回転数から移動体が曲がった角度を計測する。ジャイロ10は、光ファイバジャイロや振動ジャイロで構成され、車両(移動体)が回転した角度を検出する。GPS受信装置11は、GPS衛星からの信号(GPS信号)を受信し移動体とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで移動体の現在位置、進行方向および進行方位を測定する。
【0021】
ディスプレイ6は、制御ユニット1で生成された画像データを表示するユニットで、CRTや液晶ディスプレイ等により構成される。
【0022】
スピーカ7は、制御ユニット1からの音声情報(例えば、利用者へのメッセージ)等を受け付けて、その音声情報を出力する。
【0023】
入力装置8は、車載用装置の各種機能選択、目的地設定等の利用者からの指示を受け付けるユニットで、スクロールキー、縮尺変更キーなどのハードスイッチ、ジョイステック、ディスプレイ6上に貼られたタッチパネルなどで構成される。
【0024】
記憶装置9は、地図データを記憶するユニットである。なお、記憶装置9には、例えば、DVD装置やハードディスク装置を用いることができる。記憶装置9に記憶されている地図データは、地図を複数に分割することで得られるメッシュ領域毎に分類されている。また、地図データには、各メッシュ領域に含まれる道路を構成する各リンクのリンクデータが含まれている。
【0025】
続いて、上述した車載用装置の制御ユニット1が有する特徴的な機能について図2を用いて説明する。
【0026】
図2は、本実施形態の制御ユニット1の機能ブロック図である。
【0027】
図示するように、制御ユニット1は、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150を有する。
【0028】
ギアポジション判定部110は、後退センサ4からの信号を利用して、車両のギアがリバースのポジションにあるか否かを判定する。例えば、後退センサ4に、バックアップランプに供給される電流または電圧を検出するセンサを用いる場合には以下のように判定する。すなわち、ギアポジション判定部110は、後退センサ4からの信号を受信している間は、車両のギアがリバースのポジションにあると判定する。一方、ギアポジション判定部110は、後退センサ4からの信号を受信していない場合、車両のギアがリバースのポジションにはないと判定する。ギアポジション判定部110は、ギアがリバース以外からリバースのポジションに変更されたと判定した場合には、その旨を制御部150に通知する。
【0029】
物体検知部120は、ソナーセンサ3からの信号を利用して、車両の後方の所定領域内に壁等の障害物があるか否かを判定する。具体的には、ソナーセンサ3は、車両(車両の後部)から所定距離の範囲内にある壁等の障害物を検知すると、物体検知部120に信号を出力する。物体検知部120は、ソナーセンサ3からの信号を受信している場合、車両の後方の所定領域に壁等の障害物があると判定する。一方、物体検知部120は、ソナーセンサ3からの信号を受信していない場合には、車両の後方の所定領域に壁等の障害物がないと判定する。
【0030】
ナビゲーション処理部130は、一般的なカーナビゲーション装置の機能を提供する。ナビゲーション処理部130は、車速センサ5、ジャイロ10、およびGPS受信装置11からの信号を利用して車両の現在位置を算出する。ナビゲーション処理部130は、算出した現在地位周辺の地図データを記憶装置9から読み出して、地図上に現在位置を示した地図画像を生成して、制御部100を介して、ディスプレイ6に表示する。また、ナビゲーション処理部130は、入力装置8を介して、ユーザから受け付けた目的地までの推奨経路を探索して、ユーザに提示したり、探索した推奨経路を利用してユーザを誘導する。なお、ナビゲーション処理部130の機能は、既存の技術により実現可能である。
【0031】
制御部150は、ディスプレイ6が行う表示処理を制御する。具体的には、制御部150は、ギアポジション判定部110が、車両のギアのポジションがリバースの位置にあると判定した場合に、カメラ2を制御して、車両の後方を撮影させる。カメラ2は、撮影した車両後方の画像を制御部150に出力する。制御部150は、カメラ2からの車両後方の画像を受信し、受信した画像をディスプレイ6に表示する。また、制御部150は、ギアポジション判定部110が、車両のギアのポジションがリバースではないと判定している場合、ナビゲーション処理部130に、地図上に現在位置を示した地図画像を生成させ、その生成させた地図画像をディスプレイ6に表示する。
【0032】
さらに、本実施形態の制御部150は、車両のギアがリバースからリバース以外のポジションに変化した場合であっても、物体検知部120が、車両の後部から所定距離の範囲内に物体があると判定している間は、ディスプレイ6に表示する画像を、車両の後方の画像から地図画像に切り換えず、車両の後方の画像を表示し続ける。
【0033】
なお、上述した制御ユニット1の各機能部(ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150)は、ソフトウェアにより実現されてもいいし、各機能部を実行するために専用に設計された回路(ASIC(Application Specific Integrated Circuit)等)により実現されてもよい。
【0034】
例えば、制御ユニット1の各機能部をソフトウェアにより実現する場合、制御ユニット1には、CPU(Central Processing Unit)と、メモリと、カメラ2との間で行われるデータ送受信を制御するインタフェースと、各センサ(3、4、5、10)からのデータを受け付けるインタフェースと、ディスプレイ6、スピーカ7、入力装置8、記憶装置9、およびGPS受信装置11との間で行われるデータの送受信を制御するインタフェースとを備える情報処理装置を用いることができる。
【0035】
この場合、メモリに、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150の機能を実現するためのプログラムを記憶させておく。そして、ギアポジション判定部110、物体検知部120、ナビゲーション処理部130、入力部140、および制御部150の機能は、CPUがメモリに記憶されている上記のプログラムを実行することにより実現される。
【0036】
続いて、本実施形態の車載用装置が行う、車両の後方を撮影した画像をディスプレイ6に表示する処理について、図3および4を用いて説明する。
【0037】
図3は、本実施形態の車載用装置が行う、車両の後方画像を表示する処理のフロー図である。図4は、車両と車庫との位置の概略を示した図である。なお、図3のフローは、車両のギアポジションがリバースではない状態で開始される例を示している。
【0038】
車両のギアがリバースポジションではない場合(例えば、車両が前進している場合)には、ギアポジション判定部110は、後退センサ4からの出力により、車両のギアがリバースポジションではないと判定する。制御部150は、ギアポジション判定部110の判定結果にしたがい、ナビゲーション処理部130に地図画像を生成させて、ディスプレイ6に地図画像を表示する(S10)。
【0039】
つぎに、制御部150は、車両のギアがリバースギアに入れられたか否かを監視し、車両のギアがリバースギアに入れられた場合には、S102の処理に進み、ギアがリバース以外のポジションにあれば、S100に戻る(S11)。
【0040】
具体的には、ギアポジション判定部110は、後退センサ4が出力する信号により、ギアのポジションがリバース以外からリバースに変更されたと判定した場合、その旨を制御部150に通知する。制御部150は、ギアポジション判定部110からの上記通知(ギアのポジションがリバース以外からリバースに変更されたことの通知)を受けると、S102に進む。制御部150は、ギアポジション判定部110からの上記通知(ギアのポジションがリバース以外からリバースに変更されたことの通知)を受けなければ、地図画像の表示を続ける(すなわち、S100に戻る)。
【0041】
S102では、制御部150は、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示する。具体的には、制御部150は、カメラ2を駆動させ、カメラ2に車両の後方を撮影させる。カメラ2は、撮影した車両後方の画像を制御部150に出力する。制御部150は、カメラ2からの車両後方の画像を受信し、受信した画像をディスプレイ6に表示する。
【0042】
つぎに、制御部150は、車両のギアがリバース以外のポジションに変更されたか否かを監視して、リバース以外のポジションに変更された場合、S104に進み、リバースポジションであればS102の処理に戻る(S103)。
【0043】
具体的には、制御部150は、ギアポジション判定部110にギアの状態を問い合わせる。ギアポジション判定部110は、上記の問い合わせに応答して、ギア状態を判定し、判定結果を制御部150に通知する。制御部150は、ギアポジション判定部110からの通知が「ギアがリバース以外のポジションにある旨」を示す場合、S104に進む。制御部150は、ギアポジション判定部110からの通知が「ギアがリバースのポジションにある旨」を示す場合、S102に戻る。
【0044】
S104では、制御部150は、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを判定し、障害物があれば、S102の処理に戻り、障害物がなければS105に進む。
【0045】
具体的には、制御部150は、物体検知部120に、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを問い合わせる。物体検知部120は、上記の問い合わせに応答して、ソナーセンサ3の出力の有無から、車両の後部から所定距離の範囲内に壁等の障害物があるか否かを判定し、その判定結果を制御部150に通知する。制御部150は、物体検知部120からの通知が「障害物がある旨」を示す場合、S102に戻り、「障害物がない旨」を示す場合、S105の処理に進む。
【0046】
ここで、所定距離が「L1m」である場合の例を図4に示す。なお、図中の、2000は車庫を示し、1000は車両を示している。そして、車載用装置は、車両1000の後方から「L1m」以内に壁面2001がある場合、ギアポジションがリバースからリバース以外のポジションに変更された場合でも、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示する。一方、車両後方が、壁面2001から「L1m」より離れた場合には、ディスプレイ6に、ナビゲーション処理部130が生成した地図画像を表示する。
【0047】
このようにするのは以下のような場合に便利だからである。例えば、車両1000をバックさせて、図示する「L2(L2<L1)」の位置に止めたとする。その後、ユーザが、車両後方のハッチを開けたい等の理由により、その止めた位置から少し前に車両1000を移動さようとしたとする。この場合、本実施形態では、前進させるためにギアを前に入れても、車両後方が、壁面2001から「L1m」より離れるまでは、ディスプレイ6に車両後方の画像が表示されるので、後方の距離を簡単に確認できる。
【0048】
なお、本実施形態では、所定距離「L1」について特に限定しない。例えば、所定距離「L1」として、車両後方のハッチを開けても、ハッチが壁面2001に当たらない程度の長さとしてもよい。或いは、駐車する際の切り替えし運転を考慮した上で、所定距離「L1」を定めるようにしてもよい。また、ユーザ(或いは、車載用装置のディーラ)が、所定距離「L1」を車載用装置に設定できるようにしてもよい。このようにしておけば、車載用装置を車両に取り付ける車種に対応した所定距離「L1」を車載用装置に設定できる。また、ユーザの利用する駐車場に応じて所定距離「L1」を制御ユニット1に設定できる。
【0049】
図3に戻り、説明を続ける。S105では、制御部150は、ディスプレイ6の画像を、ナビゲーション処理部130が生成した地図画像に切り換えて処理を終了する。具体的には、制御部150は、ナビゲーション処理部130に地図画像を生成させて、ディスプレイ6の表示を車両の後方を撮影した画像から、生成させた地図画像に変更する。そして、制御部150は、カメラ2の駆動を停止する。
【0050】
このように、本実施形態では、ギアのポジションがリバースに入ると、ディスプレイ6に、カメラ2が撮影した車両後方の画像を表示するようにしている。そして、車両の後部から所定範囲内に障害物がない領域に車両が位置している場合において、ギアのポジションをリバースからリバース以外のポジションに変更した場合、自動的に、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしている。一方、車両の後部から所定範囲内に障害物がある領域に車両が位置している場合、ギアのポジションをリバースからリバース以外のポジションに変更してもディスプレイ6に、カメラ2が撮影した車両後方の画像を表示し続けるようにしている。
【0051】
そのため、本実施形態によれば、車両の後方に壁等の障害物がある駐車場に車両を駐車する際、前進と後進とが繰り返し行われても、車両の後方画像と、地図画像とが、前進と後進との繰り返しに応じて切り換わることがない。そのため、運転者の後方画像の視認性を向上させることができる。
【0052】
なお、本発明は、以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。
【0053】
例えば、図3に示すフローでは、ギアのポジションがリバースからリバース以外のポジションに変更されて、且つ車両の後部から所定距離の範囲内に壁等の障害物が無い場合に、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしているが特にこれに限定するものではない。
【0054】
入力装置8に、ディスプレイ6の表示切替え指示を受け付けるボタンを設けておき、そのボタンが操作されると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしてもよい(入力装置5がディスプレイ6上に設けられたタッチパネルの場合には、タッチパネル上の所定の領域をユーザが触ると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換える)。すなわち、この場合、制御ユニット1は、ギアポジションがリバースからリバース以外のポジションに変更され、且つ車両の後部から所定距離の範囲内に障害物がある場合であっても、入力装置8を介して、ユーザからの表示切替え指示を受け付けると、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換える。
【0055】
また、例えば、車載用装置にタイマ機能を設けておいて、制御ユニット1は、ギアポジションがリバースからリバース以外のポジションに変更されると、タイマ機能を利用して、時間の計測を開始する。制御ユニット1は、リバースからリバース以外のポジションに変更されてから所定時間経過すると、車両の後部から所定距離の範囲内に障害物がある場合であっても、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにしてもよい。
【0056】
また、例えば、ソナーセンサ3を利用しないで、ギアポジションがリバースからリバース以外のポジションに変更された場合であっても、所定時間経過するまでは、車両後方の画像を表示し続けるようにしてもよい。この場合には、ユーザからの表示切替え指示を受け付けた際、或いは、車速センサ5からの速度(前進方向の速度)が所定以上のときに、ディスプレイ6の表示画面を車両後方画像から地図画像に切り換えるようにすればよい。
【0057】
また、上記実施形態では、地図画像と車両後方画像をと切り替える場合について説明したがこれは例示に過ぎない。例えば、車載用装置にテレビ放送を受信するテレビアンテナと、テレビアンテナに接続されたテレビチューナとを設けておいて、上記の地図画像の表示に代えて、ディスプレイ6に、テレビチューナで受信した画像情報(テレビ番組)を表示するようにしてもよい。或いは、上記の地図画像の表示に代えて、車載用装置に接続した外部機器(例えば、DVD再生装置)から取得した画像情報を表示するようにしてもよい。
【図面の簡単な説明】
【0058】
【図1】本発明の実施形態が適用された車載用装置の概略構成図である。
【図2】本発明の実施形態の制御ユニット1の機能ブロック図である。
【図3】本発明の実施形態の車載用装置が行う、車両の後方画像を表示する処理のフロー図である。
【図4】車両と車庫との位置の概略を示した図である。
【符号の説明】
【0059】
1…制御ユニット、2…カメラ、3…ソナーセンサ、4…後退センサ、5…車速センサ、6…ディスプレイ、7…スピーカ、8…入力装置、9…記憶装置、10…ジャイロ、11…GPS受信装置、110…ギアポジション判定部、120…物体検知部、130…ナビゲーション処理部、140…入力部、150…制御部
【特許請求の範囲】
【請求項1】
画像を表示するディスプレイを備え、該ディスプレイに各種情報を表示する車載用装置であって、
車両の後部に設置されて該車両の後方を撮像するカメラと、
車両のギアのポジションを判定する判定手段と、
車両の後部から所定距離の範囲にある物体を検知する検知手段と、
前記判定手段が、前記ギアのポジションがリバースであると判定した場合、該カメラが撮影した車両後方の画像を取得して前記ディスプレイに表示し、前記ギアのポジションがリバースではないと判定した場合、該カメラが撮影した画像以外の他の情報を前記ディスプレイに表示する制御手段と、を備え、
前記制御手段は、前記判定手段が、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であっても、前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間は、該カメラが撮影した車両後方の画像をディスプレイに表示すること
を特徴とする車載用装置。
【請求項2】
請求項1に記載の車載用装置であって、
ユーザからの前記ディスプレイの表示切り換え指示を受け付ける入力手段を備え、
前記制御手段は、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であって、且つ前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間であっても、前記入力手段が前記表示切り換え指示を受け付けると、前記ディスプレイの表示を、該カメラが撮影した車両後方の画像から前記他の情報に切り換えること
を特徴とする車載用装置。
【請求項3】
請求項1に記載の車載用装置であって、
前記制御手段は、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であって、且つ前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間であっても、前記リバース以外のポジションに変化してから所定時間経過した場合には、前記ディスプレイの表示を該カメラが撮影した車両後方の画像から前記他の情報に切り換えること
を特徴とする車載用装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載用装置であって、
前記車両の現在位置を算出し、予め記憶している地図データ上に、前記算出した車両の現在位置を示した地図画像を生成するナビゲーション手段を有し、
前記制御手段が表示する前記他の情報とは、前記ナビゲーション手段が生成した地図画像であること
を特徴とする車載用装置。
【請求項1】
画像を表示するディスプレイを備え、該ディスプレイに各種情報を表示する車載用装置であって、
車両の後部に設置されて該車両の後方を撮像するカメラと、
車両のギアのポジションを判定する判定手段と、
車両の後部から所定距離の範囲にある物体を検知する検知手段と、
前記判定手段が、前記ギアのポジションがリバースであると判定した場合、該カメラが撮影した車両後方の画像を取得して前記ディスプレイに表示し、前記ギアのポジションがリバースではないと判定した場合、該カメラが撮影した画像以外の他の情報を前記ディスプレイに表示する制御手段と、を備え、
前記制御手段は、前記判定手段が、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であっても、前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間は、該カメラが撮影した車両後方の画像をディスプレイに表示すること
を特徴とする車載用装置。
【請求項2】
請求項1に記載の車載用装置であって、
ユーザからの前記ディスプレイの表示切り換え指示を受け付ける入力手段を備え、
前記制御手段は、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であって、且つ前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間であっても、前記入力手段が前記表示切り換え指示を受け付けると、前記ディスプレイの表示を、該カメラが撮影した車両後方の画像から前記他の情報に切り換えること
を特徴とする車載用装置。
【請求項3】
請求項1に記載の車載用装置であって、
前記制御手段は、前記ギアのポジションがリバースから該リバース以外に変更されたと判定した場合であって、且つ前記検知手段が前記車両の後部から所定距離の範囲にある物体を検知している間であっても、前記リバース以外のポジションに変化してから所定時間経過した場合には、前記ディスプレイの表示を該カメラが撮影した車両後方の画像から前記他の情報に切り換えること
を特徴とする車載用装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車載用装置であって、
前記車両の現在位置を算出し、予め記憶している地図データ上に、前記算出した車両の現在位置を示した地図画像を生成するナビゲーション手段を有し、
前記制御手段が表示する前記他の情報とは、前記ナビゲーション手段が生成した地図画像であること
を特徴とする車載用装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−24077(P2008−24077A)
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願番号】特願2006−196675(P2006−196675)
【出願日】平成18年7月19日(2006.7.19)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願日】平成18年7月19日(2006.7.19)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]