
車載用運転支援装置
【課題】運転者による車両の運転を支援するナビゲーション装置で、高架道路と高架道路でない道路が並走している場合にも車両が走行中の道路を正しく特定すること。
【解決手段】車両が高架道路の継ぎ目を通過する際に検出される衝撃のデータを衝撃データベース130に記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出されると、道路種別判断部150が加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの間の相関値を算出し、算出した相関値に基づいて道路種別を判断するよう構成する。
【解決手段】車両が高架道路の継ぎ目を通過する際に検出される衝撃のデータを衝撃データベース130に記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出されると、道路種別判断部150が加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの間の相関値を算出し、算出した相関値に基づいて道路種別を判断するよう構成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、運転者による車両の運転を支援する車載用運転支援装置に関し、特に、高速道路に限定されない高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができる車載用運転支援装置に関するものである。
【背景技術】
【0002】
車載用ナビゲーション装置(車載用運転支援装置)は、地図データを記録したDVDやHDDの地図データ記憶装置、表示装置、ジャイロ、GPS受信機や車速センサ等の車両の現在位置や現在方位を検出する車両移動検出装置等を有している。
【0003】
そして、車両の現在位置を含む地図データを地図データ記憶装置から読み出し、読み出した地図データに基づいて車両位置の地図画像を表示装置に描画するとともに、車両位置マーク(ロケーション)を地図画像に重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示したり、地図画像を画面に固定して車両位置マークを移動させたりして、車両が現在どこを走行しているのかを運転者が一目で判るようにしている。
【0004】
また、通常、車載用ナビゲーション装置には、ユーザーが所望の目的地に向けて道路を間違うことなく容易に走行できるようにした経路誘導機能が搭載されている。この経路誘導機能によれば、地図データを用いて出発地から目的地までを結ぶ最もコストが低い経路を横型探索法やダイクストラ法等を用いたシミュレーション計算により自動探索し、探索した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の道路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離内に近づいたときに、地図画像上の進路変更交差点に進路を示す矢印を描画して画面表示したりすることで、ユーザーを目的地まで案内することができる。
【0005】
なお、ここでのコストとは、距離を基に、道路幅員、道路種別(一般道か高速道かなど)、右折、左折等に応じた定数を乗じた値や、車両の走行予測時間などであり、誘導経路としての適正の程度を数値化したものである。すなわち、距離が同一の2つの経路があったとしても、ユーザーが例えば有料道路を使用するか否か、距離を優先するか時間を優先するかなどを指定するとコストは異なったものとなる。
【0006】
また、DVD等の地図データ記憶装置に記憶されている地図は、1/12500、1/25000、1/50000、1/100000等の縮尺レベルに応じて適当な大きさの経度幅および緯度幅に区切られており、道路等は経度および緯度で表現された頂点(ノード)の座標集合として記憶されている。道路は2以上のノードの連結からなり、2つのノードを連結した部分はリンクといわれる。
【0007】
また、地図データは、(1)道路リスト、ノードテーブル、交差点構成ノードリスト等からなる道路レイヤ、(2)地図画面上に道路、建築物、公園、河川等を表示するための背景レイヤ、(3)市町村名などの行政区画名、道路名、交差点名、建築物の名前等の文字や地図記号等を表示するための文字・記号レイヤ等から構成される。
【0008】
車載用ナビゲーション装置では、GPS、自立航法、マップマッチング等の技術を併用して車両の位置の検出精度を高めている。しかしながら、高架道路と高架されていない道路とが並行している場合は、高架されていない道路を走行中であるにもかかわらず車載用ナビゲーション装置が高架道路を走行中と判断したり、逆に高架道路を走行中であるにもかかわらず車載用ナビゲーション装置が高架されていない道路を走行中と判断してしまうことがある。
【0009】
すなわち、高架道路と高架されていない道路とが並行している場合は、実際に走行しているルート(現在の車両位置)と車載用ナビゲーション装置が認識しているルート(現在の車両位置)とが異なることにより、車載用ナビゲーション装置が誤った案内情報を提供してしまうことがある。
【0010】
そこで、カメラを車両に搭載し、画像認識によって高速道路あるいは一般道路固有の対象物の出現率や路面路側の白線の長さを求めて高速道路か一般道路かを判定する技術が開発されている(例えば、特許文献1および2参照。)。また、高速道路と一般道路が並走する場合に、インターチェンジが存在し、かつ車速が所定の速度を超えるか否かに基づいて高速道路か一般道路かを判断する技術も開発されている(例えば、特許文献3参照。)。
【0011】
【特許文献1】特開2003−279363号公報
【特許文献2】特開2005−114535号公報
【特許文献3】特許第3498421号明細書
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、かかる従来技術には、高速道路でない高架道路と高架道路でない道路とが並走している場合に、高速道路でない高架道路は高速道路の特徴を備えていないため、高速道路でない高架道路と高架道路でない道路とを区別することができないという問題がある。
【0013】
この発明は、上述した従来技術による問題点を解消するためになされたものであり、高速道路に限定されない高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができる車載用運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するため、請求項1の発明に係る車載用運転支援装置は、運転者による車両の運転を支援する車載用運転支援装置であって、車両に加わる衝撃を検出する衝撃検出手段により検出された衝撃に基づいて、車両が走行中の道路の種別を判断する道路種別判断手段を備えたことを特徴とする。
【0015】
この請求項1の発明によれば、車両に加わる衝撃に基づいて、車両が走行中の道路の種別を判断するよう構成したので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができる。
【0016】
また、請求項2の発明に係る車載用運転支援装置は、請求項1の発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断することを特徴とする。
【0017】
この請求項2の発明によれば、検出した衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断するよう構成したので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができる。
【0018】
また、請求項3の発明に係る車載用運転支援装置は、請求項2の発明において、前記道路種別判断手段は、高架道路の継ぎ目が存在する位置を示す情報と前記衝撃検出手段により検出された衝撃の位置の情報とに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0019】
この請求項3の発明によれば、高架道路の継ぎ目が存在する位置を示す情報と検出した衝撃の位置の情報とに基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0020】
また、請求項4の発明に係る車載用運転支援装置は、請求項2の発明において、前記特有の衝撃を表すデータを記憶する衝撃データ記憶手段と、前記特有の衝撃が発生したことが確実な場合に該発生した特有の衝撃のデータを前記衝撃データ記憶手段に登録する衝撃データ登録手段とをさらに備え、前記道路種別判断手段は、前記衝撃データ登録手段により衝撃データ記憶手段に登録された特有の衝撃のデータと前記衝撃検出手段により検出された衝撃のデータとに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0021】
この請求項4の発明によれば、高架道路の継ぎ目特有の衝撃が発生したことが確実な場合に発生した特有の衝撃のデータを登録し、登録した特有の衝撃のデータと検出した衝撃のデータとに基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0022】
また、請求項5の発明に係る車載用運転支援装置は、請求項2の発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の距離間隔に基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0023】
この請求項5の発明によれば、検出した衝撃の距離間隔に基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0024】
また、請求項6の発明に係る車載用運転支援装置は、請求項1〜5のいずれか一つの発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の強さが所定の値以上になった場合に起動されることを特徴とする。
【0025】
この請求項6の発明によれば、検出した衝撃の強さが所定の値以上になった場合に道路種別判断機能を起動するよう構成したので、無駄に道路種別判断が行われることを防ぐことができる。
【0026】
また、請求項7の発明に係る車載用運転支援装置は、請求項1〜5のいずれか一つの発明において、前記道路種別判断手段は、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されることを特徴とする。
【0027】
この請求項7の発明によれば、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されるよう構成したので、地図データだけでは道路の特定が困難であるときだけに道路種別判断機能を動作させることができる。
【0028】
また、請求項8の発明に係る車載用運転支援装置は、請求項1〜7のいずれか一つの発明において、前記道路種別判断手段は、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に該不揮発性メモリに道路の種別の判断結果が記憶されている場合には、該記憶されている判断結果を利用することを特徴とする。
【0029】
この請求項8の発明によれば、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に不揮発性メモリに道路の種別の判断結果が記憶されている場合には、記憶されている判断結果を利用するよう構成したので、過去の判断結果を有効に利用することができる。
【発明の効果】
【0030】
請求項1および2の発明によれば、車両が高架道路を走行中か高架道路でない道路を走行中かを特定するので、高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができるという効果を奏する。
【0031】
また、請求項3〜5の発明によれば、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断するので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができるという効果を奏する。
【0032】
また、請求項6の発明によれば、無駄に道路種別判断が行われることを防ぐので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【0033】
また、請求項7の発明によれば、地図データだけでは道路の特定が困難であるときだけに道路種別判断機能を動作させるので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【0034】
また、請求項8の発明によれば、過去の判断結果を有効に利用するので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【発明を実施するための最良の形態】
【0035】
以下に添付図面を参照して、この発明に係る車載用運転支援装置の好適な実施例を詳細に説明する。
【実施例】
【0036】
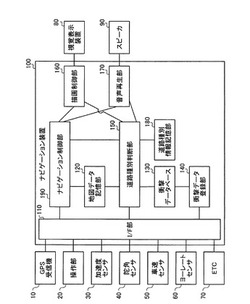
まず、本実施例に係るナビゲーション装置の構成について説明する。図1は、本実施例に係るナビゲーション装置の構成を示す機能ブロック図である。同図に示すように、このナビゲーション装置100は、I/F部110と、地図データ記憶部120と、衝撃データベース130と、衝撃データ登録部140と、道路種別判断部150と、描画制御部160と、音声再生部170と、道路種別情報記憶部180と、ナビゲーション制御部190とを有する。
【0037】
I/F部110は、車両に搭載されたセンサや他の装置などとのインタフェースであり、具体的には、GPS(Global Positioning System)受信機10、操作部20、加速度センサ30、陀角センサ40、車速センサ50、ヨーレートセンサ60およびETC70とナビゲーション装置100とを接続する。
【0038】
ここで、GPS受信機10は、GPS衛星からの電波を受信して車両の位置を検出する装置であり、操作部20は、ユーザーがナビゲーション装置100を使用する場合に行うユーザーの操作を受け付ける部分である。加速度センサ30は、車両の加速度を検出するセンサであり、陀角センサ40は、ハンドルの陀角を検出するセンサである。車速センサ50は、車両の速度を検出するセンサであり、ヨーレートセンサ60は、車両の回転角を検出するセンサであり、ETC70は、ETCシステム(Electric Toll Collection system)で使用する車載器である。
【0039】
地図データ記憶部120は、地図データを記憶する記憶部である。衝撃データベース130は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃データを所定時間(継ぎ目の通過に要する時間)分だけ記憶する記憶部である。
【0040】
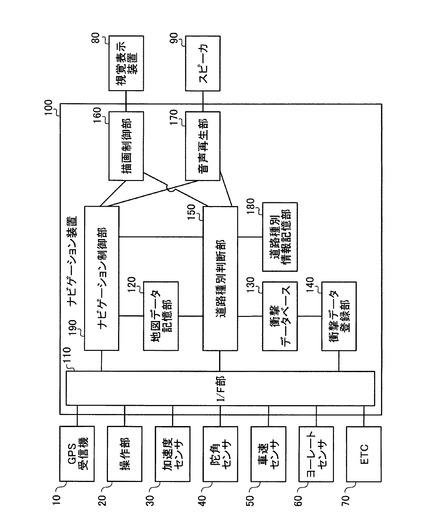
図2は、加速度センサ30の搭載位置を示す図である。同図に示すように、本実施例では、加速度センサ30を各車輪の衝撃を検出する位置に取り付けることとする。なお、加速度センサ30としては、エアバッグECUの加速度センサを利用することもできる。
【0041】
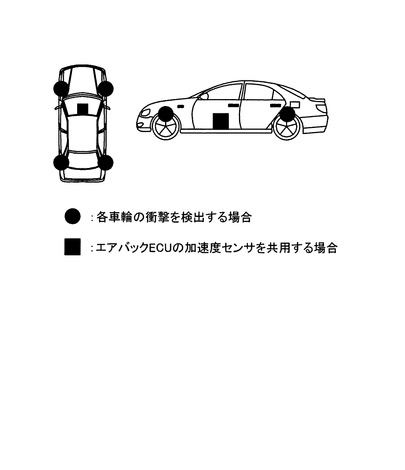
図3は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃波形の一例を示す図である。同図に示すように、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃波形は、前後輪で時間的にずれて検出され、また継ぎ目ごとに衝撃波形が連続して検出されるという特徴がある。本実施例に係るナビゲーション装置100は、このような衝撃波形の特徴や波形自体の特徴などを利用して、走行中の道路が高架道路であるか否かを特定する。
【0042】
なお、衝撃データベース130は、車両が高架道路の継ぎ目を通過するのに要する所定時間分の衝撃データを記憶するが、この所定時間は車速によって異なる。したがって、この衝撃データベース130は、複数の車速にそれぞれ対応する衝撃データを記憶する。
【0043】
衝撃データ登録部140は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出された衝撃のデータ(加速度の時間変化データ)を衝撃データベース130に登録する処理部である。この衝撃データ登録部140は、ETC70からの情報で高架道路を走行していることが判明している場合や、高架道路でない道路と並走していない高架道路を走行中の場合など高架道路を走行していることが確実な場合に、加速度センサ30によって検出された衝撃データを車速とともに衝撃データベース130に登録する。
【0044】
道路種別判断部150は、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に車速ごとに登録された衝撃データとの間に相関関係があるか否かに基づいて道路種別を判断し、判断結果を道路種別情報記憶部180に格納する処理部である。
【0045】
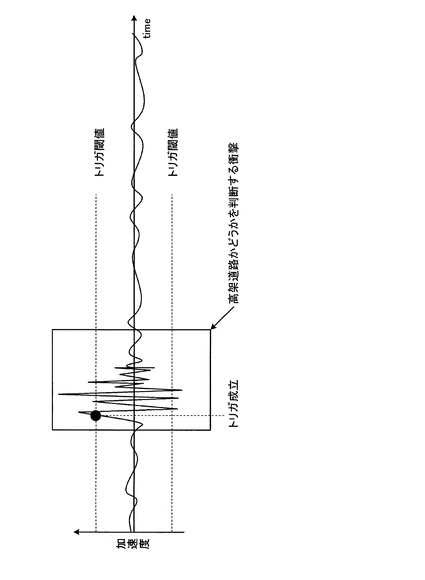
この道路種別判断部150は、加速度センサ30によって検出された衝撃が所定のトリガ閾値以上になると起動される。図4は、道路種別判断部150が起動されるトリガ閾値を示す図である。同図に示すように、道路種別判断部150は、衝撃データの値(加速度)の絶対値が所定の閾値以上になると起動される。
【0046】
ただし、この道路種別判断部150は、地図データから現在走行中の車両位置では高架道路と高架道路でない道路とが並走していないと判断される場合には、起動されない。すなわち、この道路種別判断部150は、現在走行中の車両が高架道路と高架道路でない道路とが並走している場所に位置し、加速度センサ30によって検出された衝撃が所定のトリガ閾値以上になると起動される。
【0047】
なお、操作部20に道路種別判断機能を動作させるか否かを指定するスイッチを設け、ユーザーが道路種別判断機能を動作させることを指定した場合にだけ道路種別判断部150を起動するようにすることもできる。
【0048】
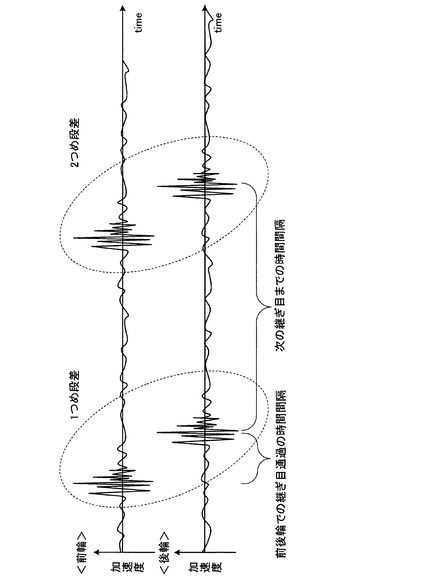
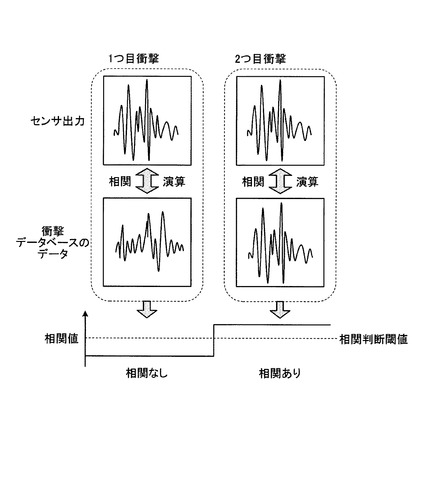
図5は、加速度センサ30のセンサ出力と衝撃データベース130に登録された衝撃データとの間の相関関係の有無を説明するための説明図である。同図において、1つ目の衝撃は相関がない場合を示し、2つ目の衝撃は相関がある場合を示す。すなわち、道路種別判断部150は、センサ出力と衝撃データベース130のデータとの間で相関演算を行って相関値を算出し、算出した相関値が所定の相関判断閾値より大きくない場合には相関なしと判断し、所定の相関判断閾値より大きい場合には相関ありと判断する。
【0049】
この道路種別判断部150が、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に登録された衝撃データとの間に相関関係があるか否かに基づいて道路種別を判断することによって、ナビゲーション装置100は、高架道路と高架道路でない道路とが並走している場合にも、車両が走行している道路を特定することができる。
【0050】
なお、ここでは、センサ出力と衝撃データベース130の衝撃データとの間の一つの相関値が所定の閾値より大きいか否かに基づいて相関の有無を判断することとしたが、複数の相関値を算出して合計し、合計値に対する閾値を設けて相関の有無を判断することもできる。複数の相関値の合計を相関の有無の判断に用いることによって、一つの相関値では閾値を設定することが困難である場合にも、複数の相関値の合計に対しては閾値の設定が容易になり、より正確な判断を行うことができる。
【0051】
また、ここでは、道路種別判断部150は、高架道路の継ぎ目で発生する衝撃を検出すると高架道路であると判断することとしたが、車速センサ50が検出した車速と高架道路の継ぎ目が検出される時間間隔とに基づいて継ぎ目が検出される距離間隔を算出し、算出した距離間隔に基づいて高架道路であるか否かを判断することもできる。
【0052】
また、道路種別判断部150は、陀角センサ40が検出したハンドルの陀角、ヨーレートセンサ60が検出した車両の回転角度および地図データからの道路の曲率に基づいて継ぎ目に対する車両の進行角度を検出し、検出した進行角度に対応する衝撃データを衝撃データベース130から取り出して加速度センサ30が検出した衝撃データと比較したり、検出した進行角度に基づいて継ぎ目が検出される距離間隔を補正したりすることもできる。
【0053】
また、道路種別判断部150は、タイヤ外径に基づいて衝撃データベース130の衝撃データを補正してから、加速度センサ30が検出した衝撃データと比較するようにすることもできる。
【0054】
また、道路種別判断部150は、車両位置と地図データから高架道路の複数の継ぎ目を検出することが可能であると判断した場合には、複数の継ぎ目を検出することによって、高架道路の継ぎ目が検出される時間間隔を算出するようにすることもできる。
【0055】
また、道路種別判断部150は、加速度センサ30の状態を監視し、加速度センサ30の故障を検出した場合には、道路種別の判断を行わないようにすることもできる。
【0056】
描画制御部160は、ナビゲーション制御部190の指示に基づいて地図情報や経路情報などを視覚表示装置80に表示する処理部である。また、この描画制御部160は、道路種別判断部150による道路種別判断結果や、道路種別判断部150が起動されたことを示す情報を視覚表示装置80に表示する。
【0057】
音声再生部170は、ナビゲーション制御部190の指示に基づいて運転支援情報などをスピーカ90を用いて音声出力する処理部である。また、この音声再生部170は、道路種別判断部150による道路種別判断結果や、道路種別判断部150が起動されたことを示す情報をスピーカ90を用いて音声出力する。
【0058】
なお、現在車両が走行している道路種別をユーザーが設定できる道路種別設定スイッチを操作部20に設け、道路種別判断部150による道路種別判断結果が誤っていた場合に、ユーザーが道路種別判断結果を訂正できるようにすることもできる。
【0059】
道路種別情報記憶部180は、道路種別判断部150による道路種別判断結果を記憶する記憶部である。この道路種別情報記憶部180は、不揮発性メモリによって実現され、車両の電源がオフになった場合にも道路種別判断結果を記憶することができる。
【0060】
道路種別判断部150は、この道路種別情報記憶部180に道路種別判断結果が記憶されている場合には、記憶されている道路種別判断結果をそのまま用いることができる。なお、この道路種別情報記憶部180に記憶される道路種別判断結果は、操作部20がユーザーから消去操作を受け付けると消去される。
【0061】
ナビゲーション制御部190は、ナビゲーション装置100全体の制御を行う処理部であり、具体的には、図示しない他の機能部を含めて機能部間の制御の移動や機能部と記憶部の間のデータの受け渡しなどを行うことによって、ナビゲーション装置100を一つの装置として機能させる。
【0062】
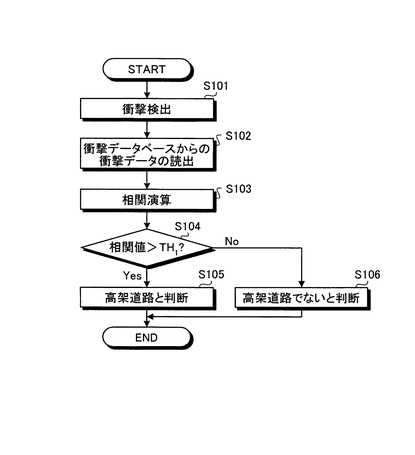
次に、道路種別判断部150の処理手順について説明する。図6は、道路種別判断部150の処理手順を示すフローチャートである。同図に示すように、道路種別判断部150は、加速度センサ30により所定の閾値以上の衝撃が検出される(ステップS101)と、衝撃データベース130から衝撃データを読み出し(ステップS102)、加速度センサ30により検出された衝撃のデータとの相関演算を行う(ステップS103)。
【0063】
そして、相関値が所定の閾値TH1より大きいか否かを判定し(ステップS104)、所定の閾値TH1より大きい場合には、道路種別を高架道路であると判断し(ステップS105)、所定の閾値TH1より大きくない場合には、道路種別を高架道路でないと判断する(ステップS106)。
【0064】
このように、道路種別判断部150が、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの相関値を算出し、算出した相関値に基づいて車両が走行中の道路種別を判断することによって、高架道路と高架道路でない道路が並走している場合にも走行中の道路を特定することができる。
【0065】
なお、ここでは、道路種別判断部150は、衝撃データベース130に登録された衝撃データと加速度センサ30により検出された衝撃のデータとの相関関係に基づいて道路種別を判断することとしたが、高架道路の継ぎ目が存在する場所を継ぎ目位置データベースとして記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出された場所と継ぎ目位置データベースが記憶する場所が一致するか否かに基づいて道路種別を判断することもできる。
【0066】
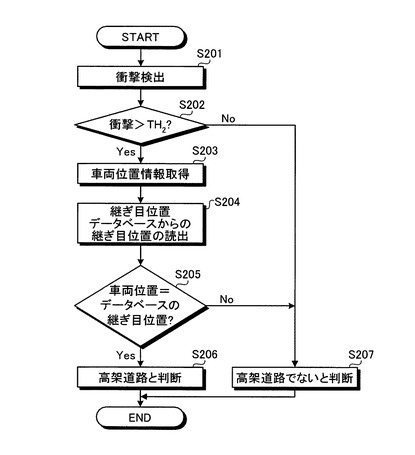
そこで、道路種別判断部150が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順について説明する。図7は、道路種別判断部150が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順を示すフローチャートである。
【0067】
同図に示すように、道路種別判断部150は、加速度センサ30により衝撃が検出される(ステップS201)と、その衝撃が所定の閾値TH2より大きいか否かを判定し(ステップS202)、所定の閾値TH2より大きい場合には、GPS受信機10から車両の位置情報を取得する(ステップS203)。
【0068】
そして、継ぎ目位置データベースから継ぎ目位置を読み出し(ステップS204)、現在の車両位置と一致する継ぎ目位置が継ぎ目位置データベースにあるか否かを判定する(ステップS205)。
【0069】
その結果、一致する継ぎ目位置が継ぎ目位置データベースにある場合には、道路種別を高架道路であると判断し(ステップS206)、一致する継ぎ目位置が継ぎ目位置データベースにない場合には、道路種別を高架道路でないと判断する(ステップS207)。
【0070】
このように、道路種別判断部150は、高架道路の継ぎ目位置を記憶する継ぎ目位置データベースを用いて道路種別を判断することによっても、高架道路と高架道路でない道路が並走している場合に走行中の道路を特定することができる。
【0071】
上述してきたように、本実施例では、車両が高架道路の継ぎ目を通過する際に検出される衝撃のデータを衝撃データベース130に記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出されると、道路種別判断部150が加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの間の相関値を算出し、算出した相関値に基づいて道路種別を判断することとしたので、ナビゲーション装置100は、高架道路と高架道路でない道路が並走している場合に走行中の道路を特定することができる。
【0072】
なお、本実施例では、一つの加速度センサ30から得られる衝撃データを用いて高架道路の継ぎ目を検出する場合について説明したが、前後輪に設置された四つの加速度センサ30を用いることによって、より精度良く高架道路の継ぎ目を検出するようにすることもできる。例えば、高架道路の継ぎ目の場合には、前後輪によって衝撃が検出されるタイミングが異なるのに対して、落下物と衝突した場合などは前後輪によって衝撃が検出されるタイミングが同時となることなどを利用して、より精度良く高架道路の継ぎ目を検出することができる。
【0073】
また、高架道路の継ぎ目を検出する場合に、衝撃データベース130を用いる方法、継ぎ目データベースを用いる方法、継ぎ目間の距離間隔を用いる方法など複数の方法を組み合わせることもできる。
【0074】
また、衝撃データベース130や継ぎ目データベースを用いることなく、加速度センサ30によって所定の閾値以上の衝撃が検出された場合に、道路種別判断部150が道路種別を高架道路と判断するようにすることもできる。
【産業上の利用可能性】
【0075】
以上のように、本発明に係る車載用運転支援装置は、車両の運転者を支援する車載装置として有用であり、特に、高架道路と高架道路でない道路が並走している場所を運転する場合に適している。
【図面の簡単な説明】
【0076】
【図1】本実施例に係るナビゲーション装置の構成を示す機能ブロック図である。
【図2】加速度センサの搭載位置を示す図である。
【図3】高架道路の継ぎ目を車両が通過したときに加速度センサによって検出される衝撃波形の一例を示す図である。
【図4】道路種別判断部が起動されるトリガ閾値を示す図である。
【図5】加速度センサのセンサ出力と衝撃データベースに登録された衝撃データとの間の相関関係の有無を説明するための説明図である。
【図6】道路種別判断部の処理手順を示すフローチャートである。
【図7】道路種別判断部が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順を示すフローチャートである。
【符号の説明】
【0077】
10 GPS受信機
20 操作部
30 加速度センサ
40 陀角センサ
50 車速センサ
60 ヨーレートセンサ
70 ETC
80 視覚表示装置
90 スピーカ
100 ナビゲーション装置
110 I/F部
120 地図データ記憶部
130 衝撃データベース
140 衝撃データ登録部
150 道路種別判断部
160 描画制御部
170 音声再生部
180 道路種別情報記憶部
190 ナビゲーション制御部
【技術分野】
【0001】
この発明は、運転者による車両の運転を支援する車載用運転支援装置に関し、特に、高速道路に限定されない高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができる車載用運転支援装置に関するものである。
【背景技術】
【0002】
車載用ナビゲーション装置(車載用運転支援装置)は、地図データを記録したDVDやHDDの地図データ記憶装置、表示装置、ジャイロ、GPS受信機や車速センサ等の車両の現在位置や現在方位を検出する車両移動検出装置等を有している。
【0003】
そして、車両の現在位置を含む地図データを地図データ記憶装置から読み出し、読み出した地図データに基づいて車両位置の地図画像を表示装置に描画するとともに、車両位置マーク(ロケーション)を地図画像に重ね合わせて表示し、車両の移動に応じて地図画像をスクロール表示したり、地図画像を画面に固定して車両位置マークを移動させたりして、車両が現在どこを走行しているのかを運転者が一目で判るようにしている。
【0004】
また、通常、車載用ナビゲーション装置には、ユーザーが所望の目的地に向けて道路を間違うことなく容易に走行できるようにした経路誘導機能が搭載されている。この経路誘導機能によれば、地図データを用いて出発地から目的地までを結ぶ最もコストが低い経路を横型探索法やダイクストラ法等を用いたシミュレーション計算により自動探索し、探索した経路を誘導経路として記憶しておき、走行中、地図画像上に誘導経路を他の道路とは色を変えて太く描画して画面表示したり、車両が誘導経路上の進路を変更すべき交差点に一定距離内に近づいたときに、地図画像上の進路変更交差点に進路を示す矢印を描画して画面表示したりすることで、ユーザーを目的地まで案内することができる。
【0005】
なお、ここでのコストとは、距離を基に、道路幅員、道路種別(一般道か高速道かなど)、右折、左折等に応じた定数を乗じた値や、車両の走行予測時間などであり、誘導経路としての適正の程度を数値化したものである。すなわち、距離が同一の2つの経路があったとしても、ユーザーが例えば有料道路を使用するか否か、距離を優先するか時間を優先するかなどを指定するとコストは異なったものとなる。
【0006】
また、DVD等の地図データ記憶装置に記憶されている地図は、1/12500、1/25000、1/50000、1/100000等の縮尺レベルに応じて適当な大きさの経度幅および緯度幅に区切られており、道路等は経度および緯度で表現された頂点(ノード)の座標集合として記憶されている。道路は2以上のノードの連結からなり、2つのノードを連結した部分はリンクといわれる。
【0007】
また、地図データは、(1)道路リスト、ノードテーブル、交差点構成ノードリスト等からなる道路レイヤ、(2)地図画面上に道路、建築物、公園、河川等を表示するための背景レイヤ、(3)市町村名などの行政区画名、道路名、交差点名、建築物の名前等の文字や地図記号等を表示するための文字・記号レイヤ等から構成される。
【0008】
車載用ナビゲーション装置では、GPS、自立航法、マップマッチング等の技術を併用して車両の位置の検出精度を高めている。しかしながら、高架道路と高架されていない道路とが並行している場合は、高架されていない道路を走行中であるにもかかわらず車載用ナビゲーション装置が高架道路を走行中と判断したり、逆に高架道路を走行中であるにもかかわらず車載用ナビゲーション装置が高架されていない道路を走行中と判断してしまうことがある。
【0009】
すなわち、高架道路と高架されていない道路とが並行している場合は、実際に走行しているルート(現在の車両位置)と車載用ナビゲーション装置が認識しているルート(現在の車両位置)とが異なることにより、車載用ナビゲーション装置が誤った案内情報を提供してしまうことがある。
【0010】
そこで、カメラを車両に搭載し、画像認識によって高速道路あるいは一般道路固有の対象物の出現率や路面路側の白線の長さを求めて高速道路か一般道路かを判定する技術が開発されている(例えば、特許文献1および2参照。)。また、高速道路と一般道路が並走する場合に、インターチェンジが存在し、かつ車速が所定の速度を超えるか否かに基づいて高速道路か一般道路かを判断する技術も開発されている(例えば、特許文献3参照。)。
【0011】
【特許文献1】特開2003−279363号公報
【特許文献2】特開2005−114535号公報
【特許文献3】特許第3498421号明細書
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、かかる従来技術には、高速道路でない高架道路と高架道路でない道路とが並走している場合に、高速道路でない高架道路は高速道路の特徴を備えていないため、高速道路でない高架道路と高架道路でない道路とを区別することができないという問題がある。
【0013】
この発明は、上述した従来技術による問題点を解消するためになされたものであり、高速道路に限定されない高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができる車載用運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
上述した課題を解決し、目的を達成するため、請求項1の発明に係る車載用運転支援装置は、運転者による車両の運転を支援する車載用運転支援装置であって、車両に加わる衝撃を検出する衝撃検出手段により検出された衝撃に基づいて、車両が走行中の道路の種別を判断する道路種別判断手段を備えたことを特徴とする。
【0015】
この請求項1の発明によれば、車両に加わる衝撃に基づいて、車両が走行中の道路の種別を判断するよう構成したので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができる。
【0016】
また、請求項2の発明に係る車載用運転支援装置は、請求項1の発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断することを特徴とする。
【0017】
この請求項2の発明によれば、検出した衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断するよう構成したので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができる。
【0018】
また、請求項3の発明に係る車載用運転支援装置は、請求項2の発明において、前記道路種別判断手段は、高架道路の継ぎ目が存在する位置を示す情報と前記衝撃検出手段により検出された衝撃の位置の情報とに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0019】
この請求項3の発明によれば、高架道路の継ぎ目が存在する位置を示す情報と検出した衝撃の位置の情報とに基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0020】
また、請求項4の発明に係る車載用運転支援装置は、請求項2の発明において、前記特有の衝撃を表すデータを記憶する衝撃データ記憶手段と、前記特有の衝撃が発生したことが確実な場合に該発生した特有の衝撃のデータを前記衝撃データ記憶手段に登録する衝撃データ登録手段とをさらに備え、前記道路種別判断手段は、前記衝撃データ登録手段により衝撃データ記憶手段に登録された特有の衝撃のデータと前記衝撃検出手段により検出された衝撃のデータとに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0021】
この請求項4の発明によれば、高架道路の継ぎ目特有の衝撃が発生したことが確実な場合に発生した特有の衝撃のデータを登録し、登録した特有の衝撃のデータと検出した衝撃のデータとに基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0022】
また、請求項5の発明に係る車載用運転支援装置は、請求項2の発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の距離間隔に基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする。
【0023】
この請求項5の発明によれば、検出した衝撃の距離間隔に基づいて、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを判断するよう構成したので、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断することができる。
【0024】
また、請求項6の発明に係る車載用運転支援装置は、請求項1〜5のいずれか一つの発明において、前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の強さが所定の値以上になった場合に起動されることを特徴とする。
【0025】
この請求項6の発明によれば、検出した衝撃の強さが所定の値以上になった場合に道路種別判断機能を起動するよう構成したので、無駄に道路種別判断が行われることを防ぐことができる。
【0026】
また、請求項7の発明に係る車載用運転支援装置は、請求項1〜5のいずれか一つの発明において、前記道路種別判断手段は、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されることを特徴とする。
【0027】
この請求項7の発明によれば、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されるよう構成したので、地図データだけでは道路の特定が困難であるときだけに道路種別判断機能を動作させることができる。
【0028】
また、請求項8の発明に係る車載用運転支援装置は、請求項1〜7のいずれか一つの発明において、前記道路種別判断手段は、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に該不揮発性メモリに道路の種別の判断結果が記憶されている場合には、該記憶されている判断結果を利用することを特徴とする。
【0029】
この請求項8の発明によれば、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に不揮発性メモリに道路の種別の判断結果が記憶されている場合には、記憶されている判断結果を利用するよう構成したので、過去の判断結果を有効に利用することができる。
【発明の効果】
【0030】
請求項1および2の発明によれば、車両が高架道路を走行中か高架道路でない道路を走行中かを特定するので、高架道路と高架道路でない道路とが並走している場合にも正確に走行中の道路を特定することができるという効果を奏する。
【0031】
また、請求項3〜5の発明によれば、検出した衝撃が高架道路の継ぎ目特有の衝撃であるか否かを適切に判断するので、車両が高架道路を走行中か高架道路でない道路を走行中かを特定することができるという効果を奏する。
【0032】
また、請求項6の発明によれば、無駄に道路種別判断が行われることを防ぐので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【0033】
また、請求項7の発明によれば、地図データだけでは道路の特定が困難であるときだけに道路種別判断機能を動作させるので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【0034】
また、請求項8の発明によれば、過去の判断結果を有効に利用するので、車載用運転支援装置が無駄に動作することを防ぐことができるという効果を奏する。
【発明を実施するための最良の形態】
【0035】
以下に添付図面を参照して、この発明に係る車載用運転支援装置の好適な実施例を詳細に説明する。
【実施例】
【0036】
まず、本実施例に係るナビゲーション装置の構成について説明する。図1は、本実施例に係るナビゲーション装置の構成を示す機能ブロック図である。同図に示すように、このナビゲーション装置100は、I/F部110と、地図データ記憶部120と、衝撃データベース130と、衝撃データ登録部140と、道路種別判断部150と、描画制御部160と、音声再生部170と、道路種別情報記憶部180と、ナビゲーション制御部190とを有する。
【0037】
I/F部110は、車両に搭載されたセンサや他の装置などとのインタフェースであり、具体的には、GPS(Global Positioning System)受信機10、操作部20、加速度センサ30、陀角センサ40、車速センサ50、ヨーレートセンサ60およびETC70とナビゲーション装置100とを接続する。
【0038】
ここで、GPS受信機10は、GPS衛星からの電波を受信して車両の位置を検出する装置であり、操作部20は、ユーザーがナビゲーション装置100を使用する場合に行うユーザーの操作を受け付ける部分である。加速度センサ30は、車両の加速度を検出するセンサであり、陀角センサ40は、ハンドルの陀角を検出するセンサである。車速センサ50は、車両の速度を検出するセンサであり、ヨーレートセンサ60は、車両の回転角を検出するセンサであり、ETC70は、ETCシステム(Electric Toll Collection system)で使用する車載器である。
【0039】
地図データ記憶部120は、地図データを記憶する記憶部である。衝撃データベース130は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃データを所定時間(継ぎ目の通過に要する時間)分だけ記憶する記憶部である。
【0040】
図2は、加速度センサ30の搭載位置を示す図である。同図に示すように、本実施例では、加速度センサ30を各車輪の衝撃を検出する位置に取り付けることとする。なお、加速度センサ30としては、エアバッグECUの加速度センサを利用することもできる。
【0041】
図3は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃波形の一例を示す図である。同図に示すように、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出される衝撃波形は、前後輪で時間的にずれて検出され、また継ぎ目ごとに衝撃波形が連続して検出されるという特徴がある。本実施例に係るナビゲーション装置100は、このような衝撃波形の特徴や波形自体の特徴などを利用して、走行中の道路が高架道路であるか否かを特定する。
【0042】
なお、衝撃データベース130は、車両が高架道路の継ぎ目を通過するのに要する所定時間分の衝撃データを記憶するが、この所定時間は車速によって異なる。したがって、この衝撃データベース130は、複数の車速にそれぞれ対応する衝撃データを記憶する。
【0043】
衝撃データ登録部140は、高架道路の継ぎ目を車両が通過したときに加速度センサ30によって検出された衝撃のデータ(加速度の時間変化データ)を衝撃データベース130に登録する処理部である。この衝撃データ登録部140は、ETC70からの情報で高架道路を走行していることが判明している場合や、高架道路でない道路と並走していない高架道路を走行中の場合など高架道路を走行していることが確実な場合に、加速度センサ30によって検出された衝撃データを車速とともに衝撃データベース130に登録する。
【0044】
道路種別判断部150は、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に車速ごとに登録された衝撃データとの間に相関関係があるか否かに基づいて道路種別を判断し、判断結果を道路種別情報記憶部180に格納する処理部である。
【0045】
この道路種別判断部150は、加速度センサ30によって検出された衝撃が所定のトリガ閾値以上になると起動される。図4は、道路種別判断部150が起動されるトリガ閾値を示す図である。同図に示すように、道路種別判断部150は、衝撃データの値(加速度)の絶対値が所定の閾値以上になると起動される。
【0046】
ただし、この道路種別判断部150は、地図データから現在走行中の車両位置では高架道路と高架道路でない道路とが並走していないと判断される場合には、起動されない。すなわち、この道路種別判断部150は、現在走行中の車両が高架道路と高架道路でない道路とが並走している場所に位置し、加速度センサ30によって検出された衝撃が所定のトリガ閾値以上になると起動される。
【0047】
なお、操作部20に道路種別判断機能を動作させるか否かを指定するスイッチを設け、ユーザーが道路種別判断機能を動作させることを指定した場合にだけ道路種別判断部150を起動するようにすることもできる。
【0048】
図5は、加速度センサ30のセンサ出力と衝撃データベース130に登録された衝撃データとの間の相関関係の有無を説明するための説明図である。同図において、1つ目の衝撃は相関がない場合を示し、2つ目の衝撃は相関がある場合を示す。すなわち、道路種別判断部150は、センサ出力と衝撃データベース130のデータとの間で相関演算を行って相関値を算出し、算出した相関値が所定の相関判断閾値より大きくない場合には相関なしと判断し、所定の相関判断閾値より大きい場合には相関ありと判断する。
【0049】
この道路種別判断部150が、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に登録された衝撃データとの間に相関関係があるか否かに基づいて道路種別を判断することによって、ナビゲーション装置100は、高架道路と高架道路でない道路とが並走している場合にも、車両が走行している道路を特定することができる。
【0050】
なお、ここでは、センサ出力と衝撃データベース130の衝撃データとの間の一つの相関値が所定の閾値より大きいか否かに基づいて相関の有無を判断することとしたが、複数の相関値を算出して合計し、合計値に対する閾値を設けて相関の有無を判断することもできる。複数の相関値の合計を相関の有無の判断に用いることによって、一つの相関値では閾値を設定することが困難である場合にも、複数の相関値の合計に対しては閾値の設定が容易になり、より正確な判断を行うことができる。
【0051】
また、ここでは、道路種別判断部150は、高架道路の継ぎ目で発生する衝撃を検出すると高架道路であると判断することとしたが、車速センサ50が検出した車速と高架道路の継ぎ目が検出される時間間隔とに基づいて継ぎ目が検出される距離間隔を算出し、算出した距離間隔に基づいて高架道路であるか否かを判断することもできる。
【0052】
また、道路種別判断部150は、陀角センサ40が検出したハンドルの陀角、ヨーレートセンサ60が検出した車両の回転角度および地図データからの道路の曲率に基づいて継ぎ目に対する車両の進行角度を検出し、検出した進行角度に対応する衝撃データを衝撃データベース130から取り出して加速度センサ30が検出した衝撃データと比較したり、検出した進行角度に基づいて継ぎ目が検出される距離間隔を補正したりすることもできる。
【0053】
また、道路種別判断部150は、タイヤ外径に基づいて衝撃データベース130の衝撃データを補正してから、加速度センサ30が検出した衝撃データと比較するようにすることもできる。
【0054】
また、道路種別判断部150は、車両位置と地図データから高架道路の複数の継ぎ目を検出することが可能であると判断した場合には、複数の継ぎ目を検出することによって、高架道路の継ぎ目が検出される時間間隔を算出するようにすることもできる。
【0055】
また、道路種別判断部150は、加速度センサ30の状態を監視し、加速度センサ30の故障を検出した場合には、道路種別の判断を行わないようにすることもできる。
【0056】
描画制御部160は、ナビゲーション制御部190の指示に基づいて地図情報や経路情報などを視覚表示装置80に表示する処理部である。また、この描画制御部160は、道路種別判断部150による道路種別判断結果や、道路種別判断部150が起動されたことを示す情報を視覚表示装置80に表示する。
【0057】
音声再生部170は、ナビゲーション制御部190の指示に基づいて運転支援情報などをスピーカ90を用いて音声出力する処理部である。また、この音声再生部170は、道路種別判断部150による道路種別判断結果や、道路種別判断部150が起動されたことを示す情報をスピーカ90を用いて音声出力する。
【0058】
なお、現在車両が走行している道路種別をユーザーが設定できる道路種別設定スイッチを操作部20に設け、道路種別判断部150による道路種別判断結果が誤っていた場合に、ユーザーが道路種別判断結果を訂正できるようにすることもできる。
【0059】
道路種別情報記憶部180は、道路種別判断部150による道路種別判断結果を記憶する記憶部である。この道路種別情報記憶部180は、不揮発性メモリによって実現され、車両の電源がオフになった場合にも道路種別判断結果を記憶することができる。
【0060】
道路種別判断部150は、この道路種別情報記憶部180に道路種別判断結果が記憶されている場合には、記憶されている道路種別判断結果をそのまま用いることができる。なお、この道路種別情報記憶部180に記憶される道路種別判断結果は、操作部20がユーザーから消去操作を受け付けると消去される。
【0061】
ナビゲーション制御部190は、ナビゲーション装置100全体の制御を行う処理部であり、具体的には、図示しない他の機能部を含めて機能部間の制御の移動や機能部と記憶部の間のデータの受け渡しなどを行うことによって、ナビゲーション装置100を一つの装置として機能させる。
【0062】
次に、道路種別判断部150の処理手順について説明する。図6は、道路種別判断部150の処理手順を示すフローチャートである。同図に示すように、道路種別判断部150は、加速度センサ30により所定の閾値以上の衝撃が検出される(ステップS101)と、衝撃データベース130から衝撃データを読み出し(ステップS102)、加速度センサ30により検出された衝撃のデータとの相関演算を行う(ステップS103)。
【0063】
そして、相関値が所定の閾値TH1より大きいか否かを判定し(ステップS104)、所定の閾値TH1より大きい場合には、道路種別を高架道路であると判断し(ステップS105)、所定の閾値TH1より大きくない場合には、道路種別を高架道路でないと判断する(ステップS106)。
【0064】
このように、道路種別判断部150が、加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの相関値を算出し、算出した相関値に基づいて車両が走行中の道路種別を判断することによって、高架道路と高架道路でない道路が並走している場合にも走行中の道路を特定することができる。
【0065】
なお、ここでは、道路種別判断部150は、衝撃データベース130に登録された衝撃データと加速度センサ30により検出された衝撃のデータとの相関関係に基づいて道路種別を判断することとしたが、高架道路の継ぎ目が存在する場所を継ぎ目位置データベースとして記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出された場所と継ぎ目位置データベースが記憶する場所が一致するか否かに基づいて道路種別を判断することもできる。
【0066】
そこで、道路種別判断部150が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順について説明する。図7は、道路種別判断部150が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順を示すフローチャートである。
【0067】
同図に示すように、道路種別判断部150は、加速度センサ30により衝撃が検出される(ステップS201)と、その衝撃が所定の閾値TH2より大きいか否かを判定し(ステップS202)、所定の閾値TH2より大きい場合には、GPS受信機10から車両の位置情報を取得する(ステップS203)。
【0068】
そして、継ぎ目位置データベースから継ぎ目位置を読み出し(ステップS204)、現在の車両位置と一致する継ぎ目位置が継ぎ目位置データベースにあるか否かを判定する(ステップS205)。
【0069】
その結果、一致する継ぎ目位置が継ぎ目位置データベースにある場合には、道路種別を高架道路であると判断し(ステップS206)、一致する継ぎ目位置が継ぎ目位置データベースにない場合には、道路種別を高架道路でないと判断する(ステップS207)。
【0070】
このように、道路種別判断部150は、高架道路の継ぎ目位置を記憶する継ぎ目位置データベースを用いて道路種別を判断することによっても、高架道路と高架道路でない道路が並走している場合に走行中の道路を特定することができる。
【0071】
上述してきたように、本実施例では、車両が高架道路の継ぎ目を通過する際に検出される衝撃のデータを衝撃データベース130に記憶し、加速度センサ30によって所定の閾値以上の衝撃が検出されると、道路種別判断部150が加速度センサ30によって検出された衝撃のデータと衝撃データベース130に記憶された衝撃データとの間の相関値を算出し、算出した相関値に基づいて道路種別を判断することとしたので、ナビゲーション装置100は、高架道路と高架道路でない道路が並走している場合に走行中の道路を特定することができる。
【0072】
なお、本実施例では、一つの加速度センサ30から得られる衝撃データを用いて高架道路の継ぎ目を検出する場合について説明したが、前後輪に設置された四つの加速度センサ30を用いることによって、より精度良く高架道路の継ぎ目を検出するようにすることもできる。例えば、高架道路の継ぎ目の場合には、前後輪によって衝撃が検出されるタイミングが異なるのに対して、落下物と衝突した場合などは前後輪によって衝撃が検出されるタイミングが同時となることなどを利用して、より精度良く高架道路の継ぎ目を検出することができる。
【0073】
また、高架道路の継ぎ目を検出する場合に、衝撃データベース130を用いる方法、継ぎ目データベースを用いる方法、継ぎ目間の距離間隔を用いる方法など複数の方法を組み合わせることもできる。
【0074】
また、衝撃データベース130や継ぎ目データベースを用いることなく、加速度センサ30によって所定の閾値以上の衝撃が検出された場合に、道路種別判断部150が道路種別を高架道路と判断するようにすることもできる。
【産業上の利用可能性】
【0075】
以上のように、本発明に係る車載用運転支援装置は、車両の運転者を支援する車載装置として有用であり、特に、高架道路と高架道路でない道路が並走している場所を運転する場合に適している。
【図面の簡単な説明】
【0076】
【図1】本実施例に係るナビゲーション装置の構成を示す機能ブロック図である。
【図2】加速度センサの搭載位置を示す図である。
【図3】高架道路の継ぎ目を車両が通過したときに加速度センサによって検出される衝撃波形の一例を示す図である。
【図4】道路種別判断部が起動されるトリガ閾値を示す図である。
【図5】加速度センサのセンサ出力と衝撃データベースに登録された衝撃データとの間の相関関係の有無を説明するための説明図である。
【図6】道路種別判断部の処理手順を示すフローチャートである。
【図7】道路種別判断部が継ぎ目位置データベースを利用して道路種別を判断する場合の処理手順を示すフローチャートである。
【符号の説明】
【0077】
10 GPS受信機
20 操作部
30 加速度センサ
40 陀角センサ
50 車速センサ
60 ヨーレートセンサ
70 ETC
80 視覚表示装置
90 スピーカ
100 ナビゲーション装置
110 I/F部
120 地図データ記憶部
130 衝撃データベース
140 衝撃データ登録部
150 道路種別判断部
160 描画制御部
170 音声再生部
180 道路種別情報記憶部
190 ナビゲーション制御部
【特許請求の範囲】
【請求項1】
運転者による車両の運転を支援する車載用運転支援装置であって、
車両に加わる衝撃を検出する衝撃検出手段により検出された衝撃に基づいて、車両が走行中の道路の種別を判断する道路種別判断手段
を備えたことを特徴とする車載用運転支援装置。
【請求項2】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断することを特徴とする請求項1に記載の車載用運転支援装置。
【請求項3】
前記道路種別判断手段は、高架道路の継ぎ目が存在する位置を示す情報と前記衝撃検出手段により検出された衝撃の位置の情報とに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項4】
前記特有の衝撃を表すデータを記憶する衝撃データ記憶手段と、
前記特有の衝撃が発生したことが確実な場合に該発生した特有の衝撃のデータを前記衝撃データ記憶手段に登録する衝撃データ登録手段とをさらに備え、
前記道路種別判断手段は、前記衝撃データ登録手段により衝撃データ記憶手段に登録された特有の衝撃のデータと前記衝撃検出手段により検出された衝撃のデータとに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項5】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の距離間隔に基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項6】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の強さが所定の値以上になった場合に起動されることを特徴とする請求項1〜5のいずれか一つに記載の車載用運転支援装置。
【請求項7】
前記道路種別判断手段は、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されることを特徴とする請求項1〜5のいずれか一つに記載の車載用運転支援装置。
【請求項8】
前記道路種別判断手段は、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に該不揮発性メモリに道路の種別の判断結果が記憶されている場合には、該記憶されている判断結果を利用することを特徴とする請求項1〜7のいずれか一つに記載の車載用運転支援装置。
【請求項1】
運転者による車両の運転を支援する車載用運転支援装置であって、
車両に加わる衝撃を検出する衝撃検出手段により検出された衝撃に基づいて、車両が走行中の道路の種別を判断する道路種別判断手段
を備えたことを特徴とする車載用運転支援装置。
【請求項2】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃が高架道路の継ぎ目を車両が通過するときに発生する特有の衝撃であるか否かに基づいて、車両が走行中の道路の種別を判断することを特徴とする請求項1に記載の車載用運転支援装置。
【請求項3】
前記道路種別判断手段は、高架道路の継ぎ目が存在する位置を示す情報と前記衝撃検出手段により検出された衝撃の位置の情報とに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項4】
前記特有の衝撃を表すデータを記憶する衝撃データ記憶手段と、
前記特有の衝撃が発生したことが確実な場合に該発生した特有の衝撃のデータを前記衝撃データ記憶手段に登録する衝撃データ登録手段とをさらに備え、
前記道路種別判断手段は、前記衝撃データ登録手段により衝撃データ記憶手段に登録された特有の衝撃のデータと前記衝撃検出手段により検出された衝撃のデータとに基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項5】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の距離間隔に基づいて、該検出された衝撃が前記特有の衝撃であるか否かを判断することを特徴とする請求項2に記載の車載用運転支援装置。
【請求項6】
前記道路種別判断手段は、前記衝撃検出手段により検出された衝撃の強さが所定の値以上になった場合に起動されることを特徴とする請求項1〜5のいずれか一つに記載の車載用運転支援装置。
【請求項7】
前記道路種別判断手段は、現在走行中の車両位置において高架道路と高架道路でない道路とが並走している場合に起動されることを特徴とする請求項1〜5のいずれか一つに記載の車載用運転支援装置。
【請求項8】
前記道路種別判断手段は、道路の種別の判断結果を不揮発性メモリに記憶し、イグニッションオン時に該不揮発性メモリに道路の種別の判断結果が記憶されている場合には、該記憶されている判断結果を利用することを特徴とする請求項1〜7のいずれか一つに記載の車載用運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−232516(P2007−232516A)
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願番号】特願2006−53337(P2006−53337)
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成19年9月13日(2007.9.13)
【国際特許分類】
【出願日】平成18年2月28日(2006.2.28)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]