
車載用電子機器及びプログラム
【課題】従来よりも適切な注意喚起をすることができる車載用電子機器等を提供する。
【解決手段】車外撮影カメラで撮影した前方映像データ中に標識があるかを判定し(S110)、標識があると判定した場合(S110:Y)、S130で道路標識の種類に基づく重要度を加味して道路標識の種類に基づく報知を抑制する(S200)か、抑制しないか(S180、S190)を決定する。したがって、重要度の低い標識についての報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【解決手段】車外撮影カメラで撮影した前方映像データ中に標識があるかを判定し(S110)、標識があると判定した場合(S110:Y)、S130で道路標識の種類に基づく重要度を加味して道路標識の種類に基づく報知を抑制する(S200)か、抑制しないか(S180、S190)を決定する。したがって、重要度の低い標識についての報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路標識を認識して道路標識に基づく報知を行なう車載用電子機器等に関するものである。
【背景技術】
【0002】
道路には、様々な道路標識があるが、ドライバーは、ついうっかりして道路標識を見落とす場合がある。
【0003】
そこで、カメラによって撮影した画像に基づいて道路標識を特定して、特定した標識の情報を出力する警報装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−185703号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、単に道路標識を認識して特定し、その特定した道路標識の情報を出力するだけでは、道路標識は多数存在することから、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題があった。
【0006】
特に一時停止や進入禁止・指定方向外通行禁止・踏切表示等の道路標識を見落とすと、重大な事故になる危険性があるという課題がある。
【0007】
また、これからの高齢化社会では高齢者に対しても、適切な注意喚起を行なうことが必要とされる。
【0008】
そこで、本発明は、係る問題を解決するためになされたもので、従来よりも適切な注意喚起をすることができる車載用電子機器等を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)上述した目的を達成するために、本発明に係る車載用電子機器は、車両の走行中に道路に設置された道路標識を撮影可能な車載カメラと、前記車載カメラによって撮影された道路標識の種類を判別し、判別した道路標識の種類に基づいて報知手段に対する報知制御を行う制御手段とを備える車載用電子機器であって、前記制御手段は、前記道路標識の種類に基づく重要度を加味して前記道路標識の種類に基づく報知を抑制するか否かを決定する。
【0010】
したがって、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【0011】
例えば、重要度の高い道路標識の種類に基づく報知は抑制せずに行い、重要度の高い道路標識の種類に基づく報知以外は抑制するようにするとよい。
【0012】
報知は、例えば、音や光で行なうとよく、例えば、道路標識の種類毎に設けた警告音を出力したり、道路標識の種類を含む注意喚起の文章を音声で出力したり、道路標識の種類毎に設けた点灯パターンでLED等を点灯させたり、液晶ディスプレイ等に道路標識のマークやその説明文等を表示させたりして行うようにするとよい。
【0013】
報知を抑制するとは、例えば、報知を行なわないようにしてもよいし、その報知態様を、報知を抑制しない場合に比べて認識しにくい態様としてもよい。例えば、報知を音で行なう場合には音量を小さくしたり、報知を光で行なう場合には光量を小さくしたりするとよい。報知をディスプレイで行なう場合には、表示面積を小さくしたり、表示色を目立たない色にしたりするなど、表示態様を目立たない態様にするとよい。
【0014】
(2)前記道路標識の種類に基づく重要度が相対的に高い道路標識として、当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識とし、当該道路標識以外の道路標識による報知は前記抑制の対象とするとよい。
【0015】
このようにすれば、衝突の危険性を予め回避することができるとともに、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決できる。
【0016】
当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識としては、例えば、止まれ、徐行、進入禁止、踏切り有り、一方通行、指定方向外進行禁止、信号機のうち少なくともいずれか1つとするとよい。
【0017】
(3)前記車両に関する情報を取得する情報取得手段を備え、前記制御手段は、前記情報取得手段によって取得された車両に関する情報を加味して前記道路標識の種類に基づく報知を抑制するとよい。
【0018】
このようにすれば、取得された車両に関する情報を加味して報知手段からの報知が抑制されるので、判別した道路標識の種類に基づく報知が常になされることで適切な注意喚起ができないという問題を解決することができる。
【0019】
(4)前記情報取得手段は、前記車両に関する情報として車両前方の信号の有無を取得し、前記制御手段は、判別した道路標識の種類が車両の停止義務を示す道路標識であってかつ前記情報取得手段から取得した情報として前記車両前方の信号が無い状態である場合に前記報知を抑制しない構成とするとよい。
【0020】
このようにすれば、特に危険な信号の無い交差点での停止義務を示す道路標識(たとえば”止まれ”の標識)に関する報知は抑制されずに行われる。したがって、重大な事故になる危険性がある信号がないが停止義務のある交差点の手前で、注意喚起をすることができる。
【0021】
この場合、情報取得手段は、例えば、前記車載カメラまたは前記車載カメラとは別の車載カメラによって撮影した映像中に信号があるか否かを判定して前記車両前方の信号の有無を取得する構成としてもよいし、予め信号のある位置を記憶手段に記憶しておき前記車両の現在位置を取得して現在位置の前方に相当する位置に記憶手段に記憶された信号のある位置が存在するか否かに基づいて前記車両前方の信号の有無を取得する構成としてもよいし、信号の手前にある車両検知用ビーコンからの信号を受信したか否かに基づいて前記車両前方の信号の有無を取得する構成としてもよい。
【0022】
(5)前記報知の抑制として、報知を行なわないものを備え、前記制御手段は、前記報知を行なわない種類の道路標識については、前記道路標識の種類の判別処理を行わない構成とするとよい。
このようにすれば、判別処理は、報知を行なう種類の道路標識に関するものに限られるため、判別時間を短縮することができる。
【0023】
(6)前記車両の現在位置を取得する現在位置取得手段を備え、前記制御手段は前記報知を行なった位置を前記現在位置取得手段によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合には、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうようにするとよい。
【0024】
このようにすれば、次に通る場合、夜間や、霧等の様に道路標識を判別し難い条件下でも報知可能になる。
【0025】
(7)(6)の構成を前提に、前記報知した道路標識の種類と関連付けて、前記報知を行った位置における車両の進行方向に関する情報を記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合であって、記憶された前記報知を行った位置における車両の進行方向に関する情報と現在の車両の進行方向に関する情報とが一致する場合にのみ、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうようにするとよい。
【0026】
このようにすれば、現在進行中の方向とは反対の方向の車両に向けて設置した道路標識が誤って報知されることがなくなる。特に、車線数が少ない道路を走行する場合や、現在位置取得手段の現在位置の精度が低く走行車線と反対車線との位置の区別がつかない場合に有効である。
【0027】
なお、車両の進行方向に関する情報は例えば現在位置取得手段によって取得した現在位置の履歴から求めたり、あるいは、地磁気センサの値から求めたりする方向取得手段を備えるとよい。車両の進行方向に関する情報は例えば進行方向そのものの情報としてもよいし、標識が向いている方向の情報としてもよい。
【0028】
(8)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知を行なうとよい。
【0029】
このようにすれば、判定結果に基づく報知が行なわれるので、例えば、ドライバーが道路標識を見落とし、道路標識の種類に基づく報知に気づかなかった場合であっても、この報知によって気づく可能性が生じる。したがって、適切な注意喚起を行なうことができる。
【0030】
当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知としては、例えば、車両状態に基づいて当該報知した道路標識の示す状態を遵守した場合には、判定結果に基づく報知を抑制し、車両状態に基づいて当該報知した道路標識の示す状態を遵守していない場合には、判定結果に基づく報知を抑制しないようにするとよい。車両状態とは、例えば、車両の走行速度や、加速/減速/停止の有無や、位置情報(移動軌跡)などがある。道路標識が「一時停止」の場合、走行速度の履歴情報から速度が0km/hとなっている停止時間を求め(位置情報の履歴から同一位置にとどまっている時間を求めても良い)、一定時間以上停止しているか否かを判断し、停止時間が短かったり、停止していなかったりした場合には報知を抑制しない。また、道路標識が「徐行」の場合、走行速度が一定の速度以下であるか否かを判定し、判定結果に基づいて報知の制御をすることができる。さらにまた道路標識が、右左折禁止や一方通行、進入禁止などの走行方向(進路)を制限するものの場合、移動軌跡からその道路標識通りに走行したか否かを判定し、判定結果に基づいて報知の制御をすることもできる。さらに、一時停止の場合、車両の前端が一時停止線の手前に位置するように停止する必要がある。そこで、上記の各発明で搭載した車載カメラ或いはさらに別のカメラにより、道路前方の一時停止線を撮像し、車両の前端が一時停止線の手前で止まっている(前方の飛び出ていない)か否かを判断し、手前で止まりかつ一定時間以上停止している場合に、一時停止という道路標識の示す状態を遵守したと判定するようにすると良い。これらの道路標識の示す状態を遵守したか否かの判定は、以下の(8)等の発明でも同様である。
【0031】
(9)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づいて前記車両状態または前記車載カメラの映像の少なくともいずれか一方を記録するとよい。
【0032】
これにより、標識を守ったか否かを証明しやすい。例えば、ドライバーやドライバーの管理者が、記録された車両状態または映像の少なくともいずれか一方を再生する情報処理装置によって車両状態や映像を再生することで、標識の見落としがあったかを確認することもできる。
【0033】
また、このようにすれば、保険会社が、この記録に基づいて、当該ドライバーが任意保険の割引対象になるか否かなどを判定することもできる。(9)(10)のようにしても同様の効果が得られる。
【0034】
(10)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車両状態を記録するとよい。
【0035】
(11)前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車載カメラの映像を記録するとよい。
【0036】
(12)(9)〜(11)のいずれかの構成を前提として、前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記記録中に前記情報取得手段から所定の車両状態が取得された場合には、前記記録を延長するようにするとよい。
【0037】
このようにすれば、所定の車両状態が取得された場合には、記録が延長されるので、標識を守ったか否かを証明しやすい。例えば、標識を認識し報知した前後10秒を記録させ、その間に所定の車両状態として衝撃や急ブレーキを感知した場合は、更にその後10秒を記録させるなどするとよい。このようにすれば、例えば、標識を認識して急ブレーキをかけたことを証明することができる。
【0038】
このように、所定の車両状態として、標識を遵守していない状態から標識を遵守した状態への変化を示す車両状態を取得するようにするとよい。
【0039】
また、逆に、制御手段は、道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守している否かを前記車両状態に基づいて判定し、遵守していない場合には、前記記録を延長するようにしてもよい。
【発明の効果】
【0040】
本発明によれば、従来よりも適切な注意喚起をすることができる車載用電子機器等を提供することができる。
【図面の簡単な説明】
【0041】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】道路標識の画像データの例を示す図である。
【図6】道路標識警報機能を実現するための処理の流れを示すフローチャートである。
【図7】道路標識警報処理における警報画面の表示例を示す図である。
【図8】道路標識警報処理における警報画面の別の表示例を示す図である。
【発明を実施するための形態】
【0042】
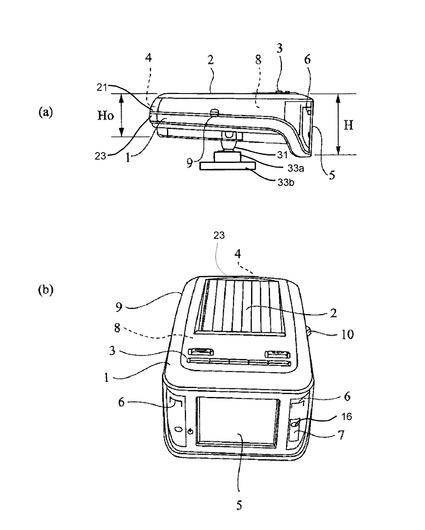
図1,図2は、本発明の車載用電子機器として好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))に車両の前方へ赤外線を照射するための赤外線プロジェクタ21と車両の前方を撮影するための車外撮影カメラ23とを備え、前面側の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の内部の上面側には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。また、ケース本体1内には、スピーカ20と加速度センサ25も内蔵している。加速度センサ25は、前後方向の加速度を検出するように設置している。
【0043】
本実施形態では、表示部5は2.4インチの小型液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0044】
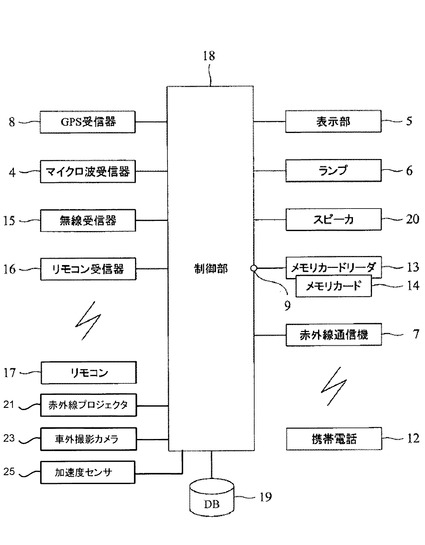
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)や注意を要する車両の道路標識に関する情報などの更新情報がある場合、その更新情報を制御部18が装置に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0045】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報と注意を要する車両の道路標識に関する情報を登録しており、その後に追加された目標物についてのデータ等が上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0046】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、再生ボタン、待受切替ボタン、設定ボタン、選択ボタン、キャンセルボタン、決定ボタンと、上下左右の十字ボタンを備えている。
【0047】
また、制御部18は、メインCPU、サブCPU,ROM,RAM,不揮発性メモリ、I/O等を備えるマイコンであり、図2に示すように上述した各部と接続され、上記の各部から入力される情報に基づき所定の処理を実行し、上記の各部を制御して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。本実施形態においては、特段の記載がない処理はメインCPUで行う。
【0048】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0049】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、映像表示機能、記録機能、映像再生機能、待ち受け画面表示機能、レーダースコープ表示機能、GPS警報機能、レーダー波警報機能、無線警報機能、道路標識警報機能などがある。
【0050】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴としてメモリカード14に記憶する機能である。この位置履歴は例えばNMEA形式で記録する機能である。
【0051】
映像表示機能は、制御部18が車外撮影カメラ23から受け取った映像データを表示部5に表示させる機能である。記録機能は、制御部18が車外撮影カメラ23から受け取った映像データと、加速度センサ25から得た加速度及びGPS受信器8から得た現在位置、現在時刻、速度(車速)からなる車両状態データとを、随時関連付けてメモリカード14に設けた「常時記録フォルダ」内に記録する機能である。記録機能は、制御部18備えるサブCPUによって電源が供給されている間は常に実行されている。映像再生機能は、制御部18がメモリカード14に記録された映像データを、表示部5に展開して表示する機能である。
【0052】
車外撮影カメラ23は、可視光線及び赤外線の帯域での撮影が可能なCCDカメラであり、制御部18のマイコンに備えるUSBポートに内部接続されている。車外撮影カメラ23は、CCDカメラで撮影した映像をA/D変換して映像データとして制御部18へ送る機能を備える。この機能は、いわゆるUSBカメラと同様の構成である。制御部18は、道路標識上の読み取りに必要な照度が不足するか否かをCCDカメラで撮影した映像の映像データの明さから判定し、照度が不足する場合には、赤外線プロジェクタ21をオンにし、車両の前方へ赤外線を照射する。
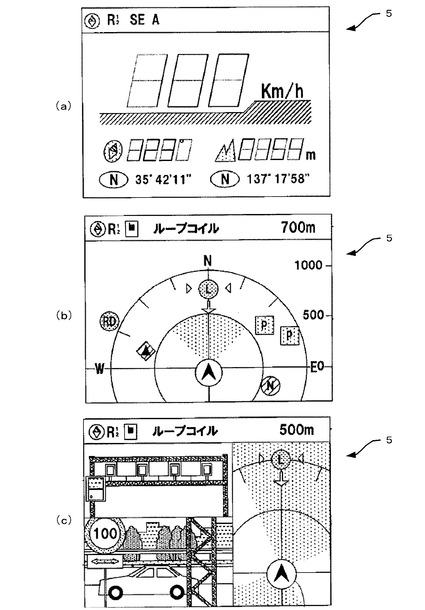
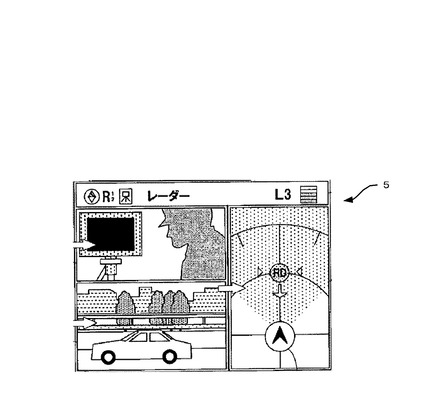
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0053】
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報から検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0054】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、映像表示機能に切り替える。また、映像表示機能の実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0055】
制御部18は、映像表示機能、待ち受け画面表示機能またはレーダースコープ表示機能(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行する。また道路標識警報機能を実現するプログラムが、タイマー割り込みによって0.2秒に1回実行される。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能、道路標識警報機能の順に設定している。
【0056】
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5にその旨を表示し、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0057】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0058】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0059】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0060】
本実施形態のレーダー探知機は、これらの機能に加え、道路標識警報機能を備える。道路標識警報機能は、比較対象の道路標識に関する情報をデータベース19に記憶しておき、車外撮影カメラ23によって撮影された映像データの中から、道路標識を抽出し、抽出した道路標識と、データベース19に記憶された比較対象の道路標識に関する情報とを比較して、その比較結果に基づき警報を行うか否かを決定し、警報を行う場合には、警報方法を決定し、その決定した警報方法による報知制御を行なうことで実現される。この警報は、ドライバーに対して注意を喚起する態様で行うよう制御する。警報の報知制御は、制御部18が、データベース19に記憶された表示用警報文字列とともに画像データを読み出して表示部5に警報画面を表示させたり、データベース19に記憶された警報音声データを読み出してスピーカ20から警報音声を出力したり、警報ランプ6を点燈させることで行う。
【0061】
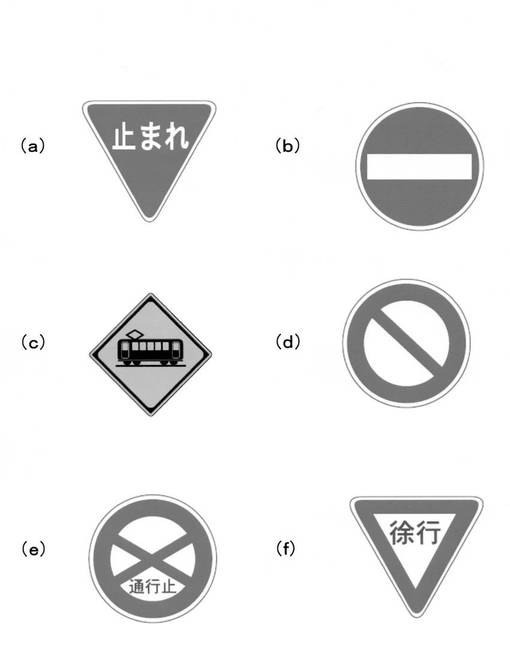
データベース19は、道路標識の情報として、図5に示す(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、(e)通行止め、(f)徐行といった標識の種類とその標識のパターンとその標識に対応する警報内容の情報とその標識の重要度とを対応付けて記憶している。標識のパターンは図5に示す画像データとして記憶しており、標識に対応する警報内容の情報としては図5に示す画像データと表示用警報文字列データと警報音声データとを対応付けて記憶している。また標識の重要度は「低」と「高」の2種類のいずれかを示すデータである。例えば、図5(a)の一時停止については、標識の種類として「一時停止」、図5(a)の画像データ、表示用警報文字列データとして「止まれ!」の文字列、警報音声データとして「ピーピー、一時停止の標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(b)の車両進入禁止については、標識の種類として「車両進入禁止」、図5(b)の画像データ、表示用警報文字列データとして「進入禁止!」の文字列、警報音声データとして「ピーピー、進入禁止の標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(c)の踏切ありについては、標識の種類として「踏切あり」、図5(c)の画像データ、表示用警報文字列データとして「踏切あり!」の文字列、警報音声データとして「ピーピー、踏切ありの標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(d)の車両通行止めについては、標識の種類として「車両通行止め」、図5(d)の画像データ、表示用警報文字列データとして「車両通行止めです!」の文字列、警報音声データとして「ピーピー、車両通行止めの標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(e)の通行止めについては、標識の種類として「通行止め」、図5(e)の画像データ、表示用警報文字列データとして「通行止めです」の文字列、警報音声データとして「通行止めの標識があります」という警報音声データ、標識の重要度として「低」を対応付けて記憶している。図5(f)の徐行については、標識の種類として「徐行」、図5(f)の画像データ、表示用警報文字列データとして「徐行」の文字列、警報音声データとして「徐行の標識があります」という警報音声データ、標識の重要度として「低」を対応付けて記憶している。道路標識の種類に基づく重要度が相対的に高い道路標識としてその道路標識に従わない場合、車両が他の物に衝突する可能性がある道路標識として本実施形態では(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、を重要度「高」とし、これらの道路標識以外の道路標識として本実施形態では(e)通行止め、(f)徐行を重要度「低」としている。
【0062】
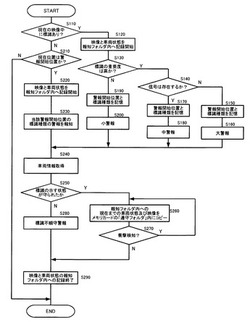
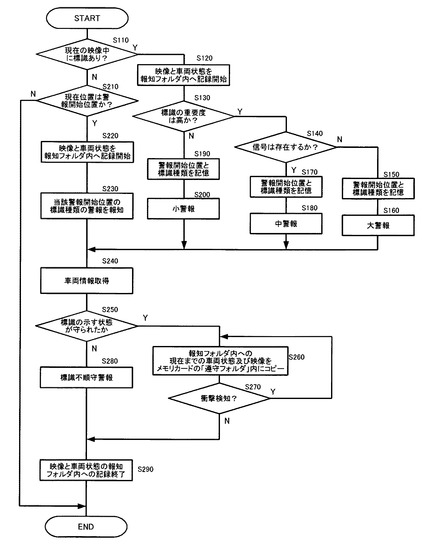
図6は、道路標識警報機能を実現するために制御部18によって実行されるプログラムによる処理の流れを示すフローチャートである。この処理は前述のとおりタイマー割り込みによって0.2秒に1回実行される(多重実行はしない)。
【0063】
まずステップ(以下Sと省略する)S110では、現在車外撮影カメラ23によって撮影された映像データの中にデータベース19に記憶された図5のいずれかの標識の画像データに対応する標識があるか図5(a)から(f)の順にパターンマッチングによって判定する。現在の映像データの中にデータベース19に記憶された標識の画像データに対応する標識がある場合、その標識を認識した標識としてRAMに記憶してS120へ移行し、対応する標識がない場合S210へ移行する。
【0064】
S120では、車外撮影カメラ23によって撮影された映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を開始する。この記録処理は「常時記録フォルダ」への記録と並行して(マルチタスクで)サブCPUによって行う。
【0065】
続くS130では、RAMに記憶されたS110で認識した標識の重要度が「高」か否かをデータベース19に記憶された当該標識の重要度から判定する。この重要度が「高」の場合(S130:Y)にはS140へ移行し、この重要度が「低」の場合(S130:N)にはS190へ移行する。
【0066】
S140では、現在車外撮影カメラ23によって撮影された映像データの中に信号機に相当するパターンがあるか否かをパターンマッチングによって判定する。映像データの中に信号機に相当するパターンがない場合(S140:N)、S150へ移行する。一方、映像データの中に信号機に相当するパターンがある場合(S140:Y)、S170へ移行する。
【0067】
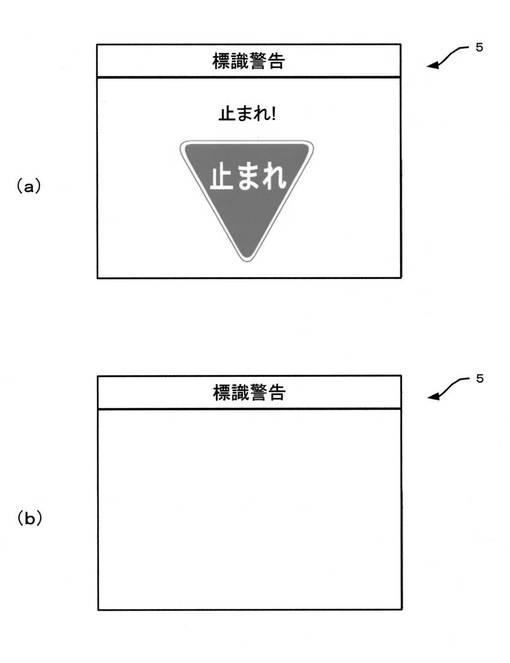
S150では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS160では、大警報を行って、S240へ移行する。大警報は、図7(a)に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共にその上にその標識の種類に対応する表示用警報文字列データの文字列を表示する表示状態と、図7(b)に示すように表示部5に画像データと文字列を表示しない非表示状態とを0.5秒おきに交互に繰り返す点滅表示を行い、スピーカ20からその標識の種類に対応する警報音声データを読みだして音声を出力し、警報ランプ6を点滅させることで行う。
【0068】
一方、S170では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS180では、中警報を行って、S240へ移行する。中警報は、図7(a)に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共に、その上にその標識の種類に対応する表示用警報文字列データの文字列を表示し、スピーカ20からその標識の種類に対応する警報音声データを読みだして音声を出力し、警報ランプ6を点灯させることで行う。こうして、中警報は、大警報で行う点滅は行わず、大警報に比べ報知は抑制しておこなう。
【0069】
一方、S190では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS200では、小警報を行って、S240へ移行する。小警報は、図8に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共に、その上にその標識の種類に対応する表示用警報文字列データの文字列を表示する。スピーカ20からの音声の出力は行わず、警報ランプ6の点灯も行わない。こうして、小警報は、中警報や大警報に比べ報知は抑制しておこなう。
【0070】
S210では、現在位置が制御部18の不揮発性メモリに記憶された警報開始位置にあたるか否かを判定する。警報開始位置にあたる場合には(S210:Y)、S220へ移行し、警報開始位置にあたらない場合には(S210;N)、この道路標識警報機能の処理を終了する。
【0071】
S220では、車外撮影カメラ23によって撮影された映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を開始する。この記録処理は「常時記録フォルダ」への記録と並行して(マルチタスクで)サブCPUによって行う。
【0072】
続くS230では、現在位置の対応する警報開始位置に対応付けて不揮発性メモリに記憶された標識の種類を読み出し、その標識の種類の警報を報知し、報知した標識の種類をRAMに記憶して、S240へ移行する。この報知は中警報の態様で行う。以前は認識できていたのに今回は認識できなかったという現状において見落としやすい標識であるため、認識できていた場合に小警報として警報していた標識については中警報の態様で行うことで注意を促すためである。
【0073】
S240では、車両情報として、メモリカード14内に設けた「報知フォルダ」内への記録している速度の履歴を取得する。
【0074】
S250では、RAMに記憶された標識の種類の示す状態が守られたか否かをS240で取得した加速度と速度の履歴から判定する。守られた場合には(S250:Y)、S260へ移行し、守られなかった場合には(S250:N)、S280へ移行する。本実施形態では、標識の種類が(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、(e)通行止めの場合には、履歴中に速度が5km/h以下になった箇所があれば守られたと判断し、標識の種類が(f)徐行の場合には速度が20km/h以下になった箇所があれば守られたと判断する。
【0075】
S260では、メモリカードの「報知フォルダ内」記録されたS120の記録開始から現在までの車両状態データ及び映像データを、メモリカードの「遵守フォルダ」内にコピーする。
【0076】
S270では、加速度センサ25から取得した加速度の現在の値が、衝撃発生に相当する加速度を示す値か否かを判定する。衝撃発生に相当する加速度を示す値である場合には(S270:Y)、S260へ移行して再び現在までの車両状態データと映像データとをメモリカードの「遵守フォルダ」内にコピーしなおす。一方、衝撃発生に相当する加速度を示す値でない場合には、S290へ移行する。
【0077】
S280では、標識不順守警報を行う。本実施形態では、標識不順守警報は、大警報の警報態様でその標識の種類の警報を行っている。
【0078】
S290では、S120で開始した映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を終了して、この道路標識警報機能の処理を終了する。
【0079】
このように、本実施形態では、S130で道路標識の種類に基づく重要度を加味して道路標識の種類に基づく報知を抑制する(S200)か否か(S180、S190)を決定する。したがって、重要度が「低」の標識についての報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【0080】
なお、本実施形態では、報知の抑制として、警報ランプ6の点滅を点灯あるいは不点灯として抑制したり、表示部5への画像の表示態様を大警報の点滅表示に比べ、中警報・小警報では抑制して単に表示したままとしたり、スピーカ20からの音声の出力を大警報・中警報では行い、小警報では抑制して行わないようにしたが、これ以外の抑制態様としてももちろんよい。例えば、スピーカ20からの音声の出力音量を大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにして行うようにしてもよい。警報ランプ6の点灯光量や表示部5の表示の明るさも、同様に大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにしてもよい。また、表示部5への標識の画像データの表示面積を大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにしてもよい。
【0081】
なお本実施形態では、道路標識に従わない場合、車両が他の物に衝突する可能性がある道路標識として(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止めとしたが、(e)通行止め、(f)徐行を含めるようにしてもよい。そして、さらに別の指示標識(主として青色の標識)や、踏切あり以外の警戒標識(主として黄色の標識)を認識対象とした上で、それ以外の標識として重要度を低としてもよい。特に、重要度「高」とするとよい標識は、止まれ、徐行、進入禁止、踏切り有り、一方通行、指定方向外進行禁止、信号機などである。
【0082】
また、本実施形態では、車両に関する情報として車両前方の信号の有無を取得(S140)し、制御部18は、判別した道路標識の種類が車両の停止義務を示す道路標識であって(S130:Y)かつ取得した情報として車両前方の信号が無い状態である場合に(S140:N)、報知を抑制しない構成(S160)としている。これにより、特に危険な信号の無い交差点での停止義務を示す道路標識(たとえば”止まれ”の標識)に関する報知は抑制されずに行われる。したがって、重大な事故になる危険性がある信号がないが停止義務のある交差点の手前で、注意喚起をすることができる。
【0083】
なお、本実施形態では、車外撮影カメラ23によって撮影した映像中に信号機があるか否かを判定して車両前方の信号の有無を取得する構成としたが、例えば、データベース19に予め信号機のある位置を記憶しておき車両の現在位置を取得して現在位置の前方に相当する位置に記憶された信号機のある位置が存在するか否かに基づいて車両前方の信号機の有無を取得する構成としてもよい。また信号機の手前にある車両検知用ビーコンからの信号を受信したか否かに基づいて車両前方の信号機の有無を取得する構成としてもよい。
【0084】
本実施形態では、報知の抑制として、図5に示す標識以外の標識は報知を行なわない標識としており、報知を行なわない種類の道路標識については、道路標識の種類の判別処理を行わない構成としている(S110)。そのため、判別処理は、報知を行なう種類の道路標識に関するものに限られるため、判別時間を短縮することができる。
【0085】
本実施形態では、車両の現在位置を取得するGPS受信器8を備え、制御部18は警報報知を行なった位置をGPS受信器8によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき(S150、S170、S190)、GPS受信器8によって取得された現在位置がこの記憶した位置に接近した場合(S210:Y)には、車外撮影カメラ23によって撮影された道路標識の種類の判別がなされない場合(S110:N)であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なう(S230)。したがって、一度標識が認識されて警報がなされた場所を次に通る場合に、夜間や、霧等の様に道路標識を判別し難い条件下でも警報を報知することができる。
【0086】
なお、例えば片側交互通行の道路など車線数が少ない道路を走行する場合や、GPS受信器8の現在位置の取得精度が低く現在走行中の車線と反対車線との位置の区別がつかず、S230で反対車線の道路標識の報知がなされる可能性がある。そこでさらにS150、S170、S190で現在位置を警報開始位置として記憶する際に併せて現在の進行方向を直近のGPSログから取得した位置履歴に基づいて特定して警報時方向として記憶しておき、S210では、GPS受信器8によって取得された現在位置がこの記憶した位置に接近し、かつ、現在の進行方向が、記憶された警報時方向と一致する場合にのみS220へ移行し、それ以外の場合にはこの道路標識警報機能の処理を終了するようにしてもよい。このようにすれば、現在進行中の方向とは反対の方向の車両に向けて設置した道路標識が誤って報知されることがなくなる。なお、警報時方向は、地磁気センサを制御部18に接続してその地磁気センサの値から求めるようにしてもよい。また、警報時方向は例えば進行方向ではなく、標識が向いている方向を用いてもよい。
【0087】
また、本実施形態では、車両に関する情報として、車両状態データを取得し、制御部18は、道路標識の種類に基づく報知(S160、S180、S200、S230)後に、当該報知した道路標識の示す状態を遵守したか否かを車両状態に基づいて判定し(S250)、当該判定結果に基づく報知を行なっている(S280)。すなわち、当該報知した道路標識の示す状態を遵守した場合には(S250:Y)、判定結果に基づく報知を行わず(S280の不実行により)抑制し、当該報知した道路標識の示す状態を遵守していない場合には(S250:N)、判定結果に基づく報知を抑制しないようにしている(S280での標識不順守警報)。こうすることでドライバーが道路標識を見落とし、道路標識の種類に基づく報知に気づかなかった場合であっても、この報知によって気づく可能性が生じる。したがって、適切な注意喚起を行なうことができる。
【0088】
また、本実施形態では、制御部18は、道路標識の種類に基づく報知後(S160、S180、S200、S230)に、当該報知した道路標識の示す状態を遵守したか否かを車両状態に基づいて判定し(S250)、当該判定結果に基づいて車両状態データ及び映像データを「遵守フォルダ内」に記録している(S260)。これにより、標識を守ったか否かを証明しやすい。例えば、ドライバーやドライバーの管理者が、記録された車両状態または映像の少なくともいずれか一方を再生する情報処理装置によって車両状態や映像を再生することで、標識の見落としがあったかを確認することもできる。また、これにより、保険会社が、この記録に基づいて、当該ドライバーが任意保険の割引対象になるか否かなどを判定することもできる。しかも、これとは別に、道路標識の種類に基づく報知の前後にわたって車両状態データと映像データを「報知フォルダ」内に記録している。
【0089】
さらには、本実施形態では、制御部18は、記録中に所定の車両状態として衝撃を検知した場合には(S270:Y)、記録を延長する(S270:YによるS260での再コピー)ようにしている。こうすることで、衝撃が検知された場合には、記録が延長されるので、標識を守ったか否かを証明しやすい。すなわち、本実施形態の場合、標識の示す状態が遵守されていたにもかかわらず、衝撃が発生した場合の記録がなされることから、ドライバーに落ち度がないことの証明として遵守フォルダ内の車両状態データや映像データを用いることができる。なお、本実施形態とは逆に、制御部18は、道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守している否かを車両状態に基づいて判定し、遵守していない場合には、記録を延長するようにしてもよい。
【0090】
本実施形態では、車外撮影カメラ23を内蔵することとしたが、例えば、車両に予め備える前方モニタ用カメラ等の周辺撮影用カメラから映像信号や映像データを取得するようにしてもよい。例えば、有線あるいは無線の車内ネットワークと接続し、車内ネットワークを介して周辺撮影用カメラの映像を取得するようにしてもよい。このようにすれば、レーダー探知器のように後付けの機器にカメラ等を設ける必要がなくなり、低コストで接近警報を実現することができるとともに、周辺撮影用カメラの本来の用途以外の本接近警報の用途にも兼用することができる。
【0091】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【符号の説明】
【0092】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 赤外線プロジェクタ
23 車外撮影カメラ
25 加速度センサ
【技術分野】
【0001】
本発明は、道路標識を認識して道路標識に基づく報知を行なう車載用電子機器等に関するものである。
【背景技術】
【0002】
道路には、様々な道路標識があるが、ドライバーは、ついうっかりして道路標識を見落とす場合がある。
【0003】
そこで、カメラによって撮影した画像に基づいて道路標識を特定して、特定した標識の情報を出力する警報装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−185703号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、単に道路標識を認識して特定し、その特定した道路標識の情報を出力するだけでは、道路標識は多数存在することから、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題があった。
【0006】
特に一時停止や進入禁止・指定方向外通行禁止・踏切表示等の道路標識を見落とすと、重大な事故になる危険性があるという課題がある。
【0007】
また、これからの高齢化社会では高齢者に対しても、適切な注意喚起を行なうことが必要とされる。
【0008】
そこで、本発明は、係る問題を解決するためになされたもので、従来よりも適切な注意喚起をすることができる車載用電子機器等を提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)上述した目的を達成するために、本発明に係る車載用電子機器は、車両の走行中に道路に設置された道路標識を撮影可能な車載カメラと、前記車載カメラによって撮影された道路標識の種類を判別し、判別した道路標識の種類に基づいて報知手段に対する報知制御を行う制御手段とを備える車載用電子機器であって、前記制御手段は、前記道路標識の種類に基づく重要度を加味して前記道路標識の種類に基づく報知を抑制するか否かを決定する。
【0010】
したがって、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【0011】
例えば、重要度の高い道路標識の種類に基づく報知は抑制せずに行い、重要度の高い道路標識の種類に基づく報知以外は抑制するようにするとよい。
【0012】
報知は、例えば、音や光で行なうとよく、例えば、道路標識の種類毎に設けた警告音を出力したり、道路標識の種類を含む注意喚起の文章を音声で出力したり、道路標識の種類毎に設けた点灯パターンでLED等を点灯させたり、液晶ディスプレイ等に道路標識のマークやその説明文等を表示させたりして行うようにするとよい。
【0013】
報知を抑制するとは、例えば、報知を行なわないようにしてもよいし、その報知態様を、報知を抑制しない場合に比べて認識しにくい態様としてもよい。例えば、報知を音で行なう場合には音量を小さくしたり、報知を光で行なう場合には光量を小さくしたりするとよい。報知をディスプレイで行なう場合には、表示面積を小さくしたり、表示色を目立たない色にしたりするなど、表示態様を目立たない態様にするとよい。
【0014】
(2)前記道路標識の種類に基づく重要度が相対的に高い道路標識として、当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識とし、当該道路標識以外の道路標識による報知は前記抑制の対象とするとよい。
【0015】
このようにすれば、衝突の危険性を予め回避することができるとともに、報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決できる。
【0016】
当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識としては、例えば、止まれ、徐行、進入禁止、踏切り有り、一方通行、指定方向外進行禁止、信号機のうち少なくともいずれか1つとするとよい。
【0017】
(3)前記車両に関する情報を取得する情報取得手段を備え、前記制御手段は、前記情報取得手段によって取得された車両に関する情報を加味して前記道路標識の種類に基づく報知を抑制するとよい。
【0018】
このようにすれば、取得された車両に関する情報を加味して報知手段からの報知が抑制されるので、判別した道路標識の種類に基づく報知が常になされることで適切な注意喚起ができないという問題を解決することができる。
【0019】
(4)前記情報取得手段は、前記車両に関する情報として車両前方の信号の有無を取得し、前記制御手段は、判別した道路標識の種類が車両の停止義務を示す道路標識であってかつ前記情報取得手段から取得した情報として前記車両前方の信号が無い状態である場合に前記報知を抑制しない構成とするとよい。
【0020】
このようにすれば、特に危険な信号の無い交差点での停止義務を示す道路標識(たとえば”止まれ”の標識)に関する報知は抑制されずに行われる。したがって、重大な事故になる危険性がある信号がないが停止義務のある交差点の手前で、注意喚起をすることができる。
【0021】
この場合、情報取得手段は、例えば、前記車載カメラまたは前記車載カメラとは別の車載カメラによって撮影した映像中に信号があるか否かを判定して前記車両前方の信号の有無を取得する構成としてもよいし、予め信号のある位置を記憶手段に記憶しておき前記車両の現在位置を取得して現在位置の前方に相当する位置に記憶手段に記憶された信号のある位置が存在するか否かに基づいて前記車両前方の信号の有無を取得する構成としてもよいし、信号の手前にある車両検知用ビーコンからの信号を受信したか否かに基づいて前記車両前方の信号の有無を取得する構成としてもよい。
【0022】
(5)前記報知の抑制として、報知を行なわないものを備え、前記制御手段は、前記報知を行なわない種類の道路標識については、前記道路標識の種類の判別処理を行わない構成とするとよい。
このようにすれば、判別処理は、報知を行なう種類の道路標識に関するものに限られるため、判別時間を短縮することができる。
【0023】
(6)前記車両の現在位置を取得する現在位置取得手段を備え、前記制御手段は前記報知を行なった位置を前記現在位置取得手段によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合には、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうようにするとよい。
【0024】
このようにすれば、次に通る場合、夜間や、霧等の様に道路標識を判別し難い条件下でも報知可能になる。
【0025】
(7)(6)の構成を前提に、前記報知した道路標識の種類と関連付けて、前記報知を行った位置における車両の進行方向に関する情報を記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合であって、記憶された前記報知を行った位置における車両の進行方向に関する情報と現在の車両の進行方向に関する情報とが一致する場合にのみ、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうようにするとよい。
【0026】
このようにすれば、現在進行中の方向とは反対の方向の車両に向けて設置した道路標識が誤って報知されることがなくなる。特に、車線数が少ない道路を走行する場合や、現在位置取得手段の現在位置の精度が低く走行車線と反対車線との位置の区別がつかない場合に有効である。
【0027】
なお、車両の進行方向に関する情報は例えば現在位置取得手段によって取得した現在位置の履歴から求めたり、あるいは、地磁気センサの値から求めたりする方向取得手段を備えるとよい。車両の進行方向に関する情報は例えば進行方向そのものの情報としてもよいし、標識が向いている方向の情報としてもよい。
【0028】
(8)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知を行なうとよい。
【0029】
このようにすれば、判定結果に基づく報知が行なわれるので、例えば、ドライバーが道路標識を見落とし、道路標識の種類に基づく報知に気づかなかった場合であっても、この報知によって気づく可能性が生じる。したがって、適切な注意喚起を行なうことができる。
【0030】
当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知としては、例えば、車両状態に基づいて当該報知した道路標識の示す状態を遵守した場合には、判定結果に基づく報知を抑制し、車両状態に基づいて当該報知した道路標識の示す状態を遵守していない場合には、判定結果に基づく報知を抑制しないようにするとよい。車両状態とは、例えば、車両の走行速度や、加速/減速/停止の有無や、位置情報(移動軌跡)などがある。道路標識が「一時停止」の場合、走行速度の履歴情報から速度が0km/hとなっている停止時間を求め(位置情報の履歴から同一位置にとどまっている時間を求めても良い)、一定時間以上停止しているか否かを判断し、停止時間が短かったり、停止していなかったりした場合には報知を抑制しない。また、道路標識が「徐行」の場合、走行速度が一定の速度以下であるか否かを判定し、判定結果に基づいて報知の制御をすることができる。さらにまた道路標識が、右左折禁止や一方通行、進入禁止などの走行方向(進路)を制限するものの場合、移動軌跡からその道路標識通りに走行したか否かを判定し、判定結果に基づいて報知の制御をすることもできる。さらに、一時停止の場合、車両の前端が一時停止線の手前に位置するように停止する必要がある。そこで、上記の各発明で搭載した車載カメラ或いはさらに別のカメラにより、道路前方の一時停止線を撮像し、車両の前端が一時停止線の手前で止まっている(前方の飛び出ていない)か否かを判断し、手前で止まりかつ一定時間以上停止している場合に、一時停止という道路標識の示す状態を遵守したと判定するようにすると良い。これらの道路標識の示す状態を遵守したか否かの判定は、以下の(8)等の発明でも同様である。
【0031】
(9)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づいて前記車両状態または前記車載カメラの映像の少なくともいずれか一方を記録するとよい。
【0032】
これにより、標識を守ったか否かを証明しやすい。例えば、ドライバーやドライバーの管理者が、記録された車両状態または映像の少なくともいずれか一方を再生する情報処理装置によって車両状態や映像を再生することで、標識の見落としがあったかを確認することもできる。
【0033】
また、このようにすれば、保険会社が、この記録に基づいて、当該ドライバーが任意保険の割引対象になるか否かなどを判定することもできる。(9)(10)のようにしても同様の効果が得られる。
【0034】
(10)前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車両状態を記録するとよい。
【0035】
(11)前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車載カメラの映像を記録するとよい。
【0036】
(12)(9)〜(11)のいずれかの構成を前提として、前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、前記制御手段は、前記記録中に前記情報取得手段から所定の車両状態が取得された場合には、前記記録を延長するようにするとよい。
【0037】
このようにすれば、所定の車両状態が取得された場合には、記録が延長されるので、標識を守ったか否かを証明しやすい。例えば、標識を認識し報知した前後10秒を記録させ、その間に所定の車両状態として衝撃や急ブレーキを感知した場合は、更にその後10秒を記録させるなどするとよい。このようにすれば、例えば、標識を認識して急ブレーキをかけたことを証明することができる。
【0038】
このように、所定の車両状態として、標識を遵守していない状態から標識を遵守した状態への変化を示す車両状態を取得するようにするとよい。
【0039】
また、逆に、制御手段は、道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守している否かを前記車両状態に基づいて判定し、遵守していない場合には、前記記録を延長するようにしてもよい。
【発明の効果】
【0040】
本発明によれば、従来よりも適切な注意喚起をすることができる車載用電子機器等を提供することができる。
【図面の簡単な説明】
【0041】
【図1】本発明の好適な一実施形態であるレーダー探知機の構成を示す図である。
【図2】レーダー探知機のブロック図である。
【図3】待ち受け画面・レーダースコープ・GPS警報の表示例を示す図である。
【図4】レーダー波警報機能における警報画面の表示例を示す図である。
【図5】道路標識の画像データの例を示す図である。
【図6】道路標識警報機能を実現するための処理の流れを示すフローチャートである。
【図7】道路標識警報処理における警報画面の表示例を示す図である。
【図8】道路標識警報処理における警報画面の別の表示例を示す図である。
【発明を実施するための形態】
【0042】
図1,図2は、本発明の車載用電子機器として好適な一実施形態であるレーダー探知機の構成を示している。本レーダー探知機は通常ダッシュボード上に取り付けられる。本レーダー探知機は、図1に示すように、ケース本体1の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体1の前面側(車両前方へ配置される側(フロントガラス側))に車両の前方へ赤外線を照射するための赤外線プロジェクタ21と車両の前方を撮影するための車外撮影カメラ23とを備え、前面側の内部に速度測定装置の発する周波数帯のマイクロ波を検知するマイクロ波受信器4を配置する。一方、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))には、表示部5と警報ランプ6と赤外線通信機7とリモコン受信器16を配置している。また、ケース本体1の内部の上面側には、GPS受信器8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びに図示省略するDCジャックを配置する。また、ケース本体1内には、スピーカ20と加速度センサ25も内蔵している。加速度センサ25は、前後方向の加速度を検出するように設置している。
【0043】
本実施形態では、表示部5は2.4インチの小型液晶ディスプレイであり、ケース本体1の後面側(車両後方へ配置される側(ユーザ側(ドライバー側))を表示面としている。表示部5を実装するケース本体1の後方側の高さHは、その他の部位の高さH0よりも大きくしている。
【0044】
図2に示すように、赤外線通信機7は携帯電話機12等の赤外線通信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込んだり、データベース19や制御部18のメモリの内容をメモリカード14に書き込んだりすることができる。より具体的には、メモリカード14に格納されたデータに、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)や注意を要する車両の道路標識に関する情報などの更新情報がある場合、その更新情報を制御部18が装置に内蔵されるデータベース19に格納(ダウンロード)し、データベース19のデータを更新する。なお、メモリカードリーダ13の機能は、本体ケース1内に内蔵するように構成してもよい。
【0045】
データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)である。データベース19には、出荷時に一定の目標物に関する情報と注意を要する車両の道路標識に関する情報を登録しており、その後に追加された目標物についてのデータ等が上記のようにしてデータ更新することができる。また、データ更新は、赤外線通信機7を介して行なうこともできる。
【0046】
DCジャックは、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。無線受信器15は、飛来する所定周波数の無線を受信する。リモコン受信器16は、赤外線によりリモコン(携帯機:子機)17とデータ通信をし、装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。リモコン17には、再生ボタン、待受切替ボタン、設定ボタン、選択ボタン、キャンセルボタン、決定ボタンと、上下左右の十字ボタンを備えている。
【0047】
また、制御部18は、メインCPU、サブCPU,ROM,RAM,不揮発性メモリ、I/O等を備えるマイコンであり、図2に示すように上述した各部と接続され、上記の各部から入力される情報に基づき所定の処理を実行し、上記の各部を制御して所定の警報・メッセージや情報を出力する。なお、これらの基本構成は、基本的に従来のものと同様のものを用いることができる。本実施形態においては、特段の記載がない処理はメインCPUで行う。
【0048】
本実施形態のレーダー探知機における機能は、制御部18に有するコンピュータが実行するプログラムとして制御部18のEEPROM上に格納され、これを制御部18に有するコンピュータが実行することで実現される。
【0049】
制御部18の有するプログラムによってコンピュータが実現する機能としては、GPSログ機能、映像表示機能、記録機能、映像再生機能、待ち受け画面表示機能、レーダースコープ表示機能、GPS警報機能、レーダー波警報機能、無線警報機能、道路標識警報機能などがある。
【0050】
GPSログ機能は、制御部18が1秒ごとにGPS受信器8によって検出された現在位置をその検出した時刻および速度(車速)と関連づけて位置履歴としてメモリカード14に記憶する機能である。この位置履歴は例えばNMEA形式で記録する機能である。
【0051】
映像表示機能は、制御部18が車外撮影カメラ23から受け取った映像データを表示部5に表示させる機能である。記録機能は、制御部18が車外撮影カメラ23から受け取った映像データと、加速度センサ25から得た加速度及びGPS受信器8から得た現在位置、現在時刻、速度(車速)からなる車両状態データとを、随時関連付けてメモリカード14に設けた「常時記録フォルダ」内に記録する機能である。記録機能は、制御部18備えるサブCPUによって電源が供給されている間は常に実行されている。映像再生機能は、制御部18がメモリカード14に記録された映像データを、表示部5に展開して表示する機能である。
【0052】
車外撮影カメラ23は、可視光線及び赤外線の帯域での撮影が可能なCCDカメラであり、制御部18のマイコンに備えるUSBポートに内部接続されている。車外撮影カメラ23は、CCDカメラで撮影した映像をA/D変換して映像データとして制御部18へ送る機能を備える。この機能は、いわゆるUSBカメラと同様の構成である。制御部18は、道路標識上の読み取りに必要な照度が不足するか否かをCCDカメラで撮影した映像の映像データの明さから判定し、照度が不足する場合には、赤外線プロジェクタ21をオンにし、車両の前方へ赤外線を照射する。
待ち受け画面表示機能は、図3(a)に示すように、GPS受信器8によって検出した自車両の速度、緯度、経度、高度を表示部5に表示する機能である。
【0053】
レーダースコープ表示機能は、図3(b)に示すように、GPS受信器8によって検出した現在位置から所定の範囲内(例えば約1kmの範囲内)にある目標物をデータベース19に記憶された位置情報から検索し、自車位置と目標物の位置との相対的な位置関係を表示部5に表示させる機能である。図3(b)中の左側の「W」が西、右側の「E」が東、上側の「N」が北の方角を示し、「W」と「E」を結ぶ左右方向の線と「N」から下へ伸びる上下方向の線との交点にあるアイコンが自車位置を示している。また「L」「RD」「P」「N」等の文字を有するアイコンが目標物の種類と位置を示す。
【0054】
図3(a)に示すような待ち受け画面表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、図3(b)に示すようなレーダースコープ表示機能に切り替える。また、レーダースコープ表示機能実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、映像表示機能に切り替える。また、映像表示機能の実行中にリモコン17に設けた待受切替ボタンの押下が検出された場合、待ち受け画面表示機能に切り替える処理を行う。
【0055】
制御部18は、映像表示機能、待ち受け画面表示機能またはレーダースコープ表示機能(以下これらの機能を総称して待受機能と称する)の実行中に、発生したイベントに応じて、GPS警報機能、レーダー波警報機能、無線警報機能等の各機能を実現する処理を実行する。また道路標識警報機能を実現するプログラムが、タイマー割り込みによって0.2秒に1回実行される。各機能の優先度は、高いほうから、レーダー波警報機能、無線警報機能、GPS警報機能、道路標識警報機能の順に設定している。
【0056】
GPS警報機能は、制御部18に有するタイマーからのイベントにより所定時間間隔(1秒間隔)で実行される処理であり、データベース19に記憶された目標物の緯度経度とGPS受信器8によって検出した現在位置の緯度経度から両者の距離を求め、求めた距離が所定の接近距離(例えば500m以内)になった場合に、表示部5にその旨を表示し、スピーカ20からその旨を示す接近警告の音声を出力する処理である。
【0057】
こうした目標物としては、居眠り運転事故地点、レーダー、制限速度切替りポイント、取締エリア、検問エリア、駐禁監視エリア、Nシステム、交通監視システム、交差点監視ポイント、信号無視抑止システム、警察署、事故多発エリア、車上狙い多発エリア、急/連続カーブ(高速道)、分岐/合流ポイント(高速道)、ETCレーン事前案内(高速道)、サービスエリア(高速道)、パーキングエリア(高速道)、ハイウェイオアシス(高速道)、スマートインターチェンジ(高速道)、PA/SA内 ガソリンスタンド(高速道)、トンネル(高速道)、ハイウェイラジオ受信エリア(高速道)、県境告知、道の駅、ビューポイントパーキング等があり、これらの目標物の種別情報とその位置を示す緯度経度情報と表示部5に表示する模式図または写真のデータと音声データとを対応付けてデータベース19に記憶している。
【0058】
レーダー波警報機能は、マイクロ波受信器4によって速度測定装置(移動式レーダー等(以下、単に「レーダー」と称する))から発せられる周波数帯のマイクロ波に対応する信号が検出された場合に、表示部5に対して警報画面を表示するとともに、スピーカ20から警報音を出力する警報機能である。例えば、レーダーの発するマイクロ波の周波数帯のマイクロ波がマイクロ波受信器4によって検出された場合に、図4に示すように、データベース19に記憶されたレーダーの模式図または写真を表示部5に警報画面として表示するとともに、データベース19に記憶された音声データを読み出して「レーダーです。スピード注意」という音声をスピーカ20から出力する。音声出力中は、警報ランプ6を点燈させる。
【0059】
無線警報機能は、無線受信器15によって、緊急車両等の発する無線電波を受信した場合に、その走行等の妨げとならないよう、警報を発する機能である。無線警報機能においては、取締無線、カーロケ無線、デジタル無線、特小無線、署活系無線、警察電話、警察活動無線、レッカー無線、ヘリテレ無線、消防ヘリテレ無線、消防無線、救急無線、高速道路無線、警備無線等の周波数をスキャンし、スキャンした周波数で、無線を受信した場合には、データベース19に無線種別ごとに記憶されたその周波数に対応する無線を受信した旨の模式図を警報画面として表示部5に表示するとともに、データベース19に無線種別ごとに記憶された音声データを読み出して、スピーカ20からその無線の種別を示す警報音声を出力する。たとえば、取締無線を受信した場合には「取締無線です。スピード注意」のように音声を出力する。音声出力中は、警報ランプ6を点燈させる。
【0060】
本実施形態のレーダー探知機は、これらの機能に加え、道路標識警報機能を備える。道路標識警報機能は、比較対象の道路標識に関する情報をデータベース19に記憶しておき、車外撮影カメラ23によって撮影された映像データの中から、道路標識を抽出し、抽出した道路標識と、データベース19に記憶された比較対象の道路標識に関する情報とを比較して、その比較結果に基づき警報を行うか否かを決定し、警報を行う場合には、警報方法を決定し、その決定した警報方法による報知制御を行なうことで実現される。この警報は、ドライバーに対して注意を喚起する態様で行うよう制御する。警報の報知制御は、制御部18が、データベース19に記憶された表示用警報文字列とともに画像データを読み出して表示部5に警報画面を表示させたり、データベース19に記憶された警報音声データを読み出してスピーカ20から警報音声を出力したり、警報ランプ6を点燈させることで行う。
【0061】
データベース19は、道路標識の情報として、図5に示す(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、(e)通行止め、(f)徐行といった標識の種類とその標識のパターンとその標識に対応する警報内容の情報とその標識の重要度とを対応付けて記憶している。標識のパターンは図5に示す画像データとして記憶しており、標識に対応する警報内容の情報としては図5に示す画像データと表示用警報文字列データと警報音声データとを対応付けて記憶している。また標識の重要度は「低」と「高」の2種類のいずれかを示すデータである。例えば、図5(a)の一時停止については、標識の種類として「一時停止」、図5(a)の画像データ、表示用警報文字列データとして「止まれ!」の文字列、警報音声データとして「ピーピー、一時停止の標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(b)の車両進入禁止については、標識の種類として「車両進入禁止」、図5(b)の画像データ、表示用警報文字列データとして「進入禁止!」の文字列、警報音声データとして「ピーピー、進入禁止の標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(c)の踏切ありについては、標識の種類として「踏切あり」、図5(c)の画像データ、表示用警報文字列データとして「踏切あり!」の文字列、警報音声データとして「ピーピー、踏切ありの標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(d)の車両通行止めについては、標識の種類として「車両通行止め」、図5(d)の画像データ、表示用警報文字列データとして「車両通行止めです!」の文字列、警報音声データとして「ピーピー、車両通行止めの標識があります」という警報音声データ、標識の重要度として「高」を対応付けて記憶している。図5(e)の通行止めについては、標識の種類として「通行止め」、図5(e)の画像データ、表示用警報文字列データとして「通行止めです」の文字列、警報音声データとして「通行止めの標識があります」という警報音声データ、標識の重要度として「低」を対応付けて記憶している。図5(f)の徐行については、標識の種類として「徐行」、図5(f)の画像データ、表示用警報文字列データとして「徐行」の文字列、警報音声データとして「徐行の標識があります」という警報音声データ、標識の重要度として「低」を対応付けて記憶している。道路標識の種類に基づく重要度が相対的に高い道路標識としてその道路標識に従わない場合、車両が他の物に衝突する可能性がある道路標識として本実施形態では(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、を重要度「高」とし、これらの道路標識以外の道路標識として本実施形態では(e)通行止め、(f)徐行を重要度「低」としている。
【0062】
図6は、道路標識警報機能を実現するために制御部18によって実行されるプログラムによる処理の流れを示すフローチャートである。この処理は前述のとおりタイマー割り込みによって0.2秒に1回実行される(多重実行はしない)。
【0063】
まずステップ(以下Sと省略する)S110では、現在車外撮影カメラ23によって撮影された映像データの中にデータベース19に記憶された図5のいずれかの標識の画像データに対応する標識があるか図5(a)から(f)の順にパターンマッチングによって判定する。現在の映像データの中にデータベース19に記憶された標識の画像データに対応する標識がある場合、その標識を認識した標識としてRAMに記憶してS120へ移行し、対応する標識がない場合S210へ移行する。
【0064】
S120では、車外撮影カメラ23によって撮影された映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を開始する。この記録処理は「常時記録フォルダ」への記録と並行して(マルチタスクで)サブCPUによって行う。
【0065】
続くS130では、RAMに記憶されたS110で認識した標識の重要度が「高」か否かをデータベース19に記憶された当該標識の重要度から判定する。この重要度が「高」の場合(S130:Y)にはS140へ移行し、この重要度が「低」の場合(S130:N)にはS190へ移行する。
【0066】
S140では、現在車外撮影カメラ23によって撮影された映像データの中に信号機に相当するパターンがあるか否かをパターンマッチングによって判定する。映像データの中に信号機に相当するパターンがない場合(S140:N)、S150へ移行する。一方、映像データの中に信号機に相当するパターンがある場合(S140:Y)、S170へ移行する。
【0067】
S150では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS160では、大警報を行って、S240へ移行する。大警報は、図7(a)に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共にその上にその標識の種類に対応する表示用警報文字列データの文字列を表示する表示状態と、図7(b)に示すように表示部5に画像データと文字列を表示しない非表示状態とを0.5秒おきに交互に繰り返す点滅表示を行い、スピーカ20からその標識の種類に対応する警報音声データを読みだして音声を出力し、警報ランプ6を点滅させることで行う。
【0068】
一方、S170では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS180では、中警報を行って、S240へ移行する。中警報は、図7(a)に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共に、その上にその標識の種類に対応する表示用警報文字列データの文字列を表示し、スピーカ20からその標識の種類に対応する警報音声データを読みだして音声を出力し、警報ランプ6を点灯させることで行う。こうして、中警報は、大警報で行う点滅は行わず、大警報に比べ報知は抑制しておこなう。
【0069】
一方、S190では、現在位置を警報開始位置としこの警報開始位置とRAMに記憶されたS110で認識した標識の種類とを対応付けて、制御部18の不揮発性メモリに記憶する。続くS200では、小警報を行って、S240へ移行する。小警報は、図8に示すように表示部5に、RAMに記憶されたS110で認識した標識の種類の画像データをデータベース19から取得して表示すると共に、その上にその標識の種類に対応する表示用警報文字列データの文字列を表示する。スピーカ20からの音声の出力は行わず、警報ランプ6の点灯も行わない。こうして、小警報は、中警報や大警報に比べ報知は抑制しておこなう。
【0070】
S210では、現在位置が制御部18の不揮発性メモリに記憶された警報開始位置にあたるか否かを判定する。警報開始位置にあたる場合には(S210:Y)、S220へ移行し、警報開始位置にあたらない場合には(S210;N)、この道路標識警報機能の処理を終了する。
【0071】
S220では、車外撮影カメラ23によって撮影された映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を開始する。この記録処理は「常時記録フォルダ」への記録と並行して(マルチタスクで)サブCPUによって行う。
【0072】
続くS230では、現在位置の対応する警報開始位置に対応付けて不揮発性メモリに記憶された標識の種類を読み出し、その標識の種類の警報を報知し、報知した標識の種類をRAMに記憶して、S240へ移行する。この報知は中警報の態様で行う。以前は認識できていたのに今回は認識できなかったという現状において見落としやすい標識であるため、認識できていた場合に小警報として警報していた標識については中警報の態様で行うことで注意を促すためである。
【0073】
S240では、車両情報として、メモリカード14内に設けた「報知フォルダ」内への記録している速度の履歴を取得する。
【0074】
S250では、RAMに記憶された標識の種類の示す状態が守られたか否かをS240で取得した加速度と速度の履歴から判定する。守られた場合には(S250:Y)、S260へ移行し、守られなかった場合には(S250:N)、S280へ移行する。本実施形態では、標識の種類が(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止め、(e)通行止めの場合には、履歴中に速度が5km/h以下になった箇所があれば守られたと判断し、標識の種類が(f)徐行の場合には速度が20km/h以下になった箇所があれば守られたと判断する。
【0075】
S260では、メモリカードの「報知フォルダ内」記録されたS120の記録開始から現在までの車両状態データ及び映像データを、メモリカードの「遵守フォルダ」内にコピーする。
【0076】
S270では、加速度センサ25から取得した加速度の現在の値が、衝撃発生に相当する加速度を示す値か否かを判定する。衝撃発生に相当する加速度を示す値である場合には(S270:Y)、S260へ移行して再び現在までの車両状態データと映像データとをメモリカードの「遵守フォルダ」内にコピーしなおす。一方、衝撃発生に相当する加速度を示す値でない場合には、S290へ移行する。
【0077】
S280では、標識不順守警報を行う。本実施形態では、標識不順守警報は、大警報の警報態様でその標識の種類の警報を行っている。
【0078】
S290では、S120で開始した映像データと車両状態データのメモリカード14内に設けた「報知フォルダ」内への記録を終了して、この道路標識警報機能の処理を終了する。
【0079】
このように、本実施形態では、S130で道路標識の種類に基づく重要度を加味して道路標識の種類に基づく報知を抑制する(S200)か否か(S180、S190)を決定する。したがって、重要度が「低」の標識についての報知が頻繁になされ鬱陶しく感じたり、頻繁な報知に慣れてしまって重要な標識の報知をやりすごしてしまったりして、結局、適切な注意喚起ができないという問題を解決でき、従来に比べ適切な注意喚起をすることができる。
【0080】
なお、本実施形態では、報知の抑制として、警報ランプ6の点滅を点灯あるいは不点灯として抑制したり、表示部5への画像の表示態様を大警報の点滅表示に比べ、中警報・小警報では抑制して単に表示したままとしたり、スピーカ20からの音声の出力を大警報・中警報では行い、小警報では抑制して行わないようにしたが、これ以外の抑制態様としてももちろんよい。例えば、スピーカ20からの音声の出力音量を大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにして行うようにしてもよい。警報ランプ6の点灯光量や表示部5の表示の明るさも、同様に大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにしてもよい。また、表示部5への標識の画像データの表示面積を大警報で最も大きくし、中警報では大警報よりも小さくし、小警報では中警報よりも小さくするようにしてもよい。
【0081】
なお本実施形態では、道路標識に従わない場合、車両が他の物に衝突する可能性がある道路標識として(a)一時停止、(b)車両進入禁止、(c)踏切あり、(d)車両通行止めとしたが、(e)通行止め、(f)徐行を含めるようにしてもよい。そして、さらに別の指示標識(主として青色の標識)や、踏切あり以外の警戒標識(主として黄色の標識)を認識対象とした上で、それ以外の標識として重要度を低としてもよい。特に、重要度「高」とするとよい標識は、止まれ、徐行、進入禁止、踏切り有り、一方通行、指定方向外進行禁止、信号機などである。
【0082】
また、本実施形態では、車両に関する情報として車両前方の信号の有無を取得(S140)し、制御部18は、判別した道路標識の種類が車両の停止義務を示す道路標識であって(S130:Y)かつ取得した情報として車両前方の信号が無い状態である場合に(S140:N)、報知を抑制しない構成(S160)としている。これにより、特に危険な信号の無い交差点での停止義務を示す道路標識(たとえば”止まれ”の標識)に関する報知は抑制されずに行われる。したがって、重大な事故になる危険性がある信号がないが停止義務のある交差点の手前で、注意喚起をすることができる。
【0083】
なお、本実施形態では、車外撮影カメラ23によって撮影した映像中に信号機があるか否かを判定して車両前方の信号の有無を取得する構成としたが、例えば、データベース19に予め信号機のある位置を記憶しておき車両の現在位置を取得して現在位置の前方に相当する位置に記憶された信号機のある位置が存在するか否かに基づいて車両前方の信号機の有無を取得する構成としてもよい。また信号機の手前にある車両検知用ビーコンからの信号を受信したか否かに基づいて車両前方の信号機の有無を取得する構成としてもよい。
【0084】
本実施形態では、報知の抑制として、図5に示す標識以外の標識は報知を行なわない標識としており、報知を行なわない種類の道路標識については、道路標識の種類の判別処理を行わない構成としている(S110)。そのため、判別処理は、報知を行なう種類の道路標識に関するものに限られるため、判別時間を短縮することができる。
【0085】
本実施形態では、車両の現在位置を取得するGPS受信器8を備え、制御部18は警報報知を行なった位置をGPS受信器8によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき(S150、S170、S190)、GPS受信器8によって取得された現在位置がこの記憶した位置に接近した場合(S210:Y)には、車外撮影カメラ23によって撮影された道路標識の種類の判別がなされない場合(S110:N)であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なう(S230)。したがって、一度標識が認識されて警報がなされた場所を次に通る場合に、夜間や、霧等の様に道路標識を判別し難い条件下でも警報を報知することができる。
【0086】
なお、例えば片側交互通行の道路など車線数が少ない道路を走行する場合や、GPS受信器8の現在位置の取得精度が低く現在走行中の車線と反対車線との位置の区別がつかず、S230で反対車線の道路標識の報知がなされる可能性がある。そこでさらにS150、S170、S190で現在位置を警報開始位置として記憶する際に併せて現在の進行方向を直近のGPSログから取得した位置履歴に基づいて特定して警報時方向として記憶しておき、S210では、GPS受信器8によって取得された現在位置がこの記憶した位置に接近し、かつ、現在の進行方向が、記憶された警報時方向と一致する場合にのみS220へ移行し、それ以外の場合にはこの道路標識警報機能の処理を終了するようにしてもよい。このようにすれば、現在進行中の方向とは反対の方向の車両に向けて設置した道路標識が誤って報知されることがなくなる。なお、警報時方向は、地磁気センサを制御部18に接続してその地磁気センサの値から求めるようにしてもよい。また、警報時方向は例えば進行方向ではなく、標識が向いている方向を用いてもよい。
【0087】
また、本実施形態では、車両に関する情報として、車両状態データを取得し、制御部18は、道路標識の種類に基づく報知(S160、S180、S200、S230)後に、当該報知した道路標識の示す状態を遵守したか否かを車両状態に基づいて判定し(S250)、当該判定結果に基づく報知を行なっている(S280)。すなわち、当該報知した道路標識の示す状態を遵守した場合には(S250:Y)、判定結果に基づく報知を行わず(S280の不実行により)抑制し、当該報知した道路標識の示す状態を遵守していない場合には(S250:N)、判定結果に基づく報知を抑制しないようにしている(S280での標識不順守警報)。こうすることでドライバーが道路標識を見落とし、道路標識の種類に基づく報知に気づかなかった場合であっても、この報知によって気づく可能性が生じる。したがって、適切な注意喚起を行なうことができる。
【0088】
また、本実施形態では、制御部18は、道路標識の種類に基づく報知後(S160、S180、S200、S230)に、当該報知した道路標識の示す状態を遵守したか否かを車両状態に基づいて判定し(S250)、当該判定結果に基づいて車両状態データ及び映像データを「遵守フォルダ内」に記録している(S260)。これにより、標識を守ったか否かを証明しやすい。例えば、ドライバーやドライバーの管理者が、記録された車両状態または映像の少なくともいずれか一方を再生する情報処理装置によって車両状態や映像を再生することで、標識の見落としがあったかを確認することもできる。また、これにより、保険会社が、この記録に基づいて、当該ドライバーが任意保険の割引対象になるか否かなどを判定することもできる。しかも、これとは別に、道路標識の種類に基づく報知の前後にわたって車両状態データと映像データを「報知フォルダ」内に記録している。
【0089】
さらには、本実施形態では、制御部18は、記録中に所定の車両状態として衝撃を検知した場合には(S270:Y)、記録を延長する(S270:YによるS260での再コピー)ようにしている。こうすることで、衝撃が検知された場合には、記録が延長されるので、標識を守ったか否かを証明しやすい。すなわち、本実施形態の場合、標識の示す状態が遵守されていたにもかかわらず、衝撃が発生した場合の記録がなされることから、ドライバーに落ち度がないことの証明として遵守フォルダ内の車両状態データや映像データを用いることができる。なお、本実施形態とは逆に、制御部18は、道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守している否かを車両状態に基づいて判定し、遵守していない場合には、記録を延長するようにしてもよい。
【0090】
本実施形態では、車外撮影カメラ23を内蔵することとしたが、例えば、車両に予め備える前方モニタ用カメラ等の周辺撮影用カメラから映像信号や映像データを取得するようにしてもよい。例えば、有線あるいは無線の車内ネットワークと接続し、車内ネットワークを介して周辺撮影用カメラの映像を取得するようにしてもよい。このようにすれば、レーダー探知器のように後付けの機器にカメラ等を設ける必要がなくなり、低コストで接近警報を実現することができるとともに、周辺撮影用カメラの本来の用途以外の本接近警報の用途にも兼用することができる。
【0091】
また、本実施形態では、レーダー探知機の例で説明したが、車載用の各種の電子機器の機能として実施することができる。たとえば、ナビゲーション装置や、ドライブレコーダ、カーオーディオの機能として組み込んでもよい。また本実施例で記載した数値の値は、実験等を行って適宜、効果を奏する値に変更してもよい。また、制御部18には、各機能や警報の優先順位をリモコン17等からのユーザからの指示に基づいて設定する機能を設け、この設定された優先順位で制御部18が処理を行うように構成してもよい。
【符号の説明】
【0092】
1 ケース本体
2 ソーラーパネル
4 マイクロ波受信器
5 表示部
6 ランプ
7 赤外線通信機
8 GPS受信器
9 アダプタージャック
10 電源スイッチ
11 携帯電話機
12 メモリカードリーダ
14 メモリカード
15 無線受信器
16 リモコン受信器
17 リモコン
18 制御部
19 データベース
20 スピーカ
21 赤外線プロジェクタ
23 車外撮影カメラ
25 加速度センサ
【特許請求の範囲】
【請求項1】
車両の走行中に道路に設置された道路標識を撮影可能な車載カメラと、
前記車載カメラによって撮影された道路標識の種類を判別し、判別した道路標識の種類に基づいて報知手段に対する報知制御を行う制御手段とを備える車載用電子機器であって、
前記制御手段は、前記道路標識の種類に基づく重要度を加味して前記道路標識の種類に基づく報知を抑制するか否かを決定すること
を特徴とする車載用電子機器。
【請求項2】
前記道路標識の種類に基づく重要度が相対的に高い道路標識として、当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識とし、当該道路標識以外の道路標識による報知は前記抑制の対象とすること
を特徴とする請求項1に記載の車載用電子機器。
【請求項3】
前記車両に関する情報を取得する情報取得手段を備え、
前記制御手段は、前記情報取得手段によって取得された車両に関する情報を加味して前記道路標識の種類に基づく報知を抑制すること
を特徴とする請求項1または2に記載の車載用電子機器。
【請求項4】
前記情報取得手段は、前記車両に関する情報として車両前方の信号の有無を取得し、
前記制御手段は、判別した道路標識の種類が車両の停止義務を示す道路標識であってかつ前記情報取得手段から取得した情報として前記車両前方の信号が無い状態である場合に前記報知を抑制しないこと
を特徴とする請求項1〜3のいずれかに記載の車載用電子機器。
【請求項5】
前記報知の抑制として、報知を行なわないものを備え
前記制御手段は、前記報知を行なわない種類の道路標識については、前記道路標識の種類の判別処理を行わないこと
を特徴とする請求項1〜4のいずれかに記載の車載用電子機器。
【請求項6】
前記車両の現在位置を取得する現在位置取得手段を備え、
前記制御手段は前記報知を行なった位置を前記現在位置取得手段によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合には、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうこと
を特徴とする請求項1〜5のいずれかに記載の車載用電子機器。
【請求項7】
前記報知した道路標識の種類と関連付けて、前記報知を行った位置における車両の進行方向に関する情報を記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合であって、記憶された前記報知を行った位置における車両の進行方向に関する情報と現在の車両の進行方向に関する情報とが一致する場合にのみ、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうこと
を特徴とする請求項6に記載の車載用電子機器。
【請求項8】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知を行なうこと
を特徴とする請求項1〜7のいずれかに記載の車載用電子機器。
【請求項9】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づいて前記車両状態または前記車載カメラの映像の少なくともいずれか一方を記録すること
を特徴とする請求項1〜8のいずれかに記載の車載用電子機器。
【請求項10】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車両状態を記録すること
を特徴とする請求項1〜9のいずれかに記載の車載用電子機器。
【請求項11】
前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車載カメラの映像を記録すること
を特徴とする請求項1〜10のいずれかに記載の車載用電子機器。
【請求項12】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記記録中に前記情報取得手段から所定の車両状態が取得された場合には、前記記録を延長すること
を特徴とする請求項9〜11のいずれかに記載の車載用電子機器。
【請求項13】
請求項1〜12のいずれかに記載の車載用電子機器における制御手段としての機能をコンピュータに実現させるためのプログラム。
【請求項1】
車両の走行中に道路に設置された道路標識を撮影可能な車載カメラと、
前記車載カメラによって撮影された道路標識の種類を判別し、判別した道路標識の種類に基づいて報知手段に対する報知制御を行う制御手段とを備える車載用電子機器であって、
前記制御手段は、前記道路標識の種類に基づく重要度を加味して前記道路標識の種類に基づく報知を抑制するか否かを決定すること
を特徴とする車載用電子機器。
【請求項2】
前記道路標識の種類に基づく重要度が相対的に高い道路標識として、当該道路標識に従わない場合、前記車両が他の物に衝突する可能性がある道路標識とし、当該道路標識以外の道路標識による報知は前記抑制の対象とすること
を特徴とする請求項1に記載の車載用電子機器。
【請求項3】
前記車両に関する情報を取得する情報取得手段を備え、
前記制御手段は、前記情報取得手段によって取得された車両に関する情報を加味して前記道路標識の種類に基づく報知を抑制すること
を特徴とする請求項1または2に記載の車載用電子機器。
【請求項4】
前記情報取得手段は、前記車両に関する情報として車両前方の信号の有無を取得し、
前記制御手段は、判別した道路標識の種類が車両の停止義務を示す道路標識であってかつ前記情報取得手段から取得した情報として前記車両前方の信号が無い状態である場合に前記報知を抑制しないこと
を特徴とする請求項1〜3のいずれかに記載の車載用電子機器。
【請求項5】
前記報知の抑制として、報知を行なわないものを備え
前記制御手段は、前記報知を行なわない種類の道路標識については、前記道路標識の種類の判別処理を行わないこと
を特徴とする請求項1〜4のいずれかに記載の車載用電子機器。
【請求項6】
前記車両の現在位置を取得する現在位置取得手段を備え、
前記制御手段は前記報知を行なった位置を前記現在位置取得手段によって取得した現在位置にもとづいて特定して報知した道路標識の種類と関連づけて記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合には、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうこと
を特徴とする請求項1〜5のいずれかに記載の車載用電子機器。
【請求項7】
前記報知した道路標識の種類と関連付けて、前記報知を行った位置における車両の進行方向に関する情報を記憶しておき、前記現在位置取得手段によって取得された現在位置が前記記憶した位置に接近した場合であって、記憶された前記報知を行った位置における車両の進行方向に関する情報と現在の車両の進行方向に関する情報とが一致する場合にのみ、前記車載カメラによって撮影された道路標識の種類の判別がなされない場合であっても、当該位置に関連付けて記憶された道路標識の種類に基づく報知を行なうこと
を特徴とする請求項6に記載の車載用電子機器。
【請求項8】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づく報知を行なうこと
を特徴とする請求項1〜7のいずれかに記載の車載用電子機器。
【請求項9】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知後に、当該報知した道路標識の示す状態を遵守したか否かを前記車両状態に基づいて判定し、当該判定結果に基づいて前記車両状態または前記車載カメラの映像の少なくともいずれか一方を記録すること
を特徴とする請求項1〜8のいずれかに記載の車載用電子機器。
【請求項10】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車両状態を記録すること
を特徴とする請求項1〜9のいずれかに記載の車載用電子機器。
【請求項11】
前記制御手段は、前記道路標識の種類に基づく報知の前後にわたって前記車載カメラの映像を記録すること
を特徴とする請求項1〜10のいずれかに記載の車載用電子機器。
【請求項12】
前記情報取得手段は、前記車両に関する情報として、車両状態を取得し、
前記制御手段は、前記記録中に前記情報取得手段から所定の車両状態が取得された場合には、前記記録を延長すること
を特徴とする請求項9〜11のいずれかに記載の車載用電子機器。
【請求項13】
請求項1〜12のいずれかに記載の車載用電子機器における制御手段としての機能をコンピュータに実現させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図6】
【図5】
【図7】
【図8】
【図2】
【図3】
【図4】
【図6】
【図5】
【図7】
【図8】
【公開番号】特開2012−68962(P2012−68962A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−214026(P2010−214026)
【出願日】平成22年9月24日(2010.9.24)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月24日(2010.9.24)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]