
車載用電子機器
【課題】施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、停車時の進行方向と発車時の進行方向が一致する場合に、危険な状況の内容をユーザに分かり易くすることができる車載用電子機器を提供する。
【解決手段】警告を行う警告部と、車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、前記判定結果に応じて、発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に異なった警告を前記警告部に行わせる警告制御部と、を備えた車載用電子機器とする。
【解決手段】警告を行う警告部と、車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、前記判定結果に応じて、発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に異なった警告を前記警告部に行わせる警告制御部と、を備えた車載用電子機器とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置を始めとする車載用電子機器による警告制御に関する。
【背景技術】
【0002】
従来から、ドライバの誤操作による車両事故がしばしば発生しており、これを防止する様々な技術が開発されてきた。
【0003】
例えば、特許文献1には、車両が停車する際の進行方向を判定し、その判定結果を記憶し、発車の際に進行方向を判定し、その判定された進行方向と上記記憶した進行方向とを比較し、両者が一致すれば、発車時進行方向は安全でないとして警告するような発車時事故防止装置が開示されている。警告は、例えば「シフト位置を確認して下さい」というような音声を繰り返し出力するとしている。
【0004】
これにより、停車の際の車両の進行方向と同じ方向に発車させることができない停車場所から、その発車させることができない方向に発車することで生じる事故を未然に防止できるとしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−126940号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、車両を駐車する際、施設(コンビニエンスストア等)沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とがある。施設沿いの駐車区画に駐車する場合は、停車時の進行方向と発車時の進行方向が一致する場合には、施設に衝突する危険性がある。一方、施設から離れた位置にある駐車区画に駐車する場合は、停車時の進行方向と発車時の進行方向が一致する場合には、近くに駐車された他の車両に衝突する危険性がある。
【0007】
このように、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とでは、危険な状況の内容が異なるにも関わらず、上記特許文献1の発車時事故防止装置では、いずれの場合も同じ内容の警告がされることになり、ユーザは危険な状況の内容が分かりにくいといった問題があった。
【0008】
上記問題点を鑑み、本発明は、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、前回停車時の進行方向と発車時の進行方向が一致する場合に、危険な状況の内容をユーザに分かり易くすることができる車載用電子機器を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明の車載用電子機器は、警告を行う警告部と、車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に、前記判定部による判定結果に応じて異なった警告を前記警告部に行わせる警告制御部とを備えた構成とする(第1の構成)。
【0010】
このような構成によれば、発車時の進行方向と前回停車時の進行方向が一致する場合に、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、警告内容を変えて警告するので、ユーザは危険な状況の内容が分かり易くなる。
【0011】
また、上記第1の構成において、停車の際に自車位置と前記施設沿いの駐車区画における車止めが線上に存在するような線分または前記施設外壁の両端を結ぶ線分との距離を算出する距離算出部を備え、前記判定部は、前記算出された距離が所定距離より短いか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定する構成としてもよい(第2の構成)。
【0012】
また、上記第1の構成において、停車の際に自車位置と駐車区画の位置座標とに基づき自車が位置する駐車区画を判定する駐車区画判定部を備え、前記判定部は、前記判定された駐車区画が前記施設沿いであるか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定する構成としてもよい(第3の構成)。
【0013】
また、上記いずれかの構成において、前記警告制御部は、前記警告を前記警告部に行わせた後、車両進行方向が切替えられたか否かを判定し、切替えられていない場合、アクセルペダルが踏まれているか否かを判定し、前記アクセルペダルが踏まれている場合、前記警告よりも強い警告を前記警告部に行わせる構成としてもよい(第4の構成)。
【0014】
このような構成によれば、警告後も進行方向が切替えられておらず、しかもアクセルペダルが踏まれていれば、非常に危険な状況であるので、より強い警告を行うことでユーザに注意を促すことができる。
【0015】
また、この構成において、前記警告制御部は、前記警告よりも強い警告を前記警告部に行わせた後、ブレーキペダルが踏まれているか否かを判定し、踏まれていない場合、再び前記警告よりも強い警告を前記警告部に行わせる構成としてもよい(第5の構成)。
【0016】
このような構成によれば、強い警告を行った後にブレーキペダルが未だ踏まれていなければ、非常に危険な状況が続いているので、再び強い警告を行ってユーザに注意を促すことができる。
【0017】
また、上記第4または第5の構成において、前記警告制御部は、前記アクセルペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記アクセルペダルが踏まれているか否かを判定する構成としてもよい(第6の構成)。
【0018】
また、上記第5の構成において、前記警告制御部は、前記ブレーキペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記ブレーキペダルが踏まれているか否かを判定する構成としてもよい(第7の構成)。
【発明の効果】
【0019】
本発明の車載用電子機器によれば、前回停車時の進行方向と発車時の進行方向が一致する場合に、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、警告内容を変えるので、危険な状況の内容をユーザに分かり易くすることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態に係るナビゲーション装置のブロック構成図である。
【図2】駐車場のレイアウトの一例を示す図である。
【図3】本発明に係る停車時進行方向検出の一例に関するフローチャートである。
【図4】本発明に係る進行方向判定処理の一例に関するフローチャートである。
【図5】本発明に係るデータテーブルの一例を示す図である。
【図6】本発明に係る発車時の警告制御の一例に関するフローチャートである。
【図7】本発明に係る進行方向判定処理の一例に関するフローチャートである。
【図8】駐車場のレイアウトの一例を示す図である。
【図9】本発明に係る停車時進行方向検出の別実施形態に関するフローチャートである。
【図10】本発明に係るデータテーブルの別の一例を示す図である。
【図11】本発明に係る発車時の警告制御の別実施形態に関するフローチャートである。
【発明を実施するための形態】
【0021】
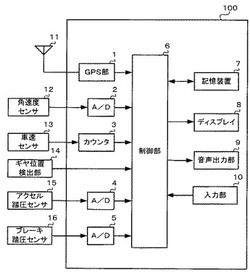
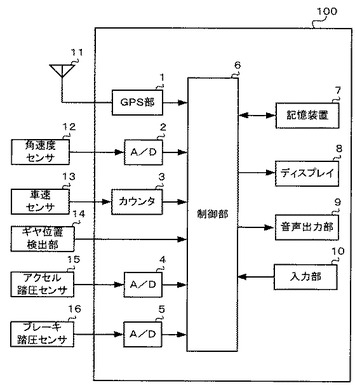
以下に本発明の実施形態を図面を参照して説明する。図1は、本発明の一実施形態に係るナビゲーション装置100のブロック構成図を示す。
【0022】
ナビゲーション装置100は、車両に搭載され、GPS部1と、A/Dコンバータ2と、カウンタ3と、A/Dコンバータ4と、A/Dコンバータ5と、制御部6と、記憶装置7と、ディスプレイ8と、音声出力部9と、入力部10と、を備えている。
【0023】
GPS部1は、車両に設けられるGPSアンテナ11に接続され、GPSアンテナ11から受信するGPS信号に基づき現在の車両位置を示す自車位置情報を生成する。
【0024】
角速度センサ12は、車両のヨー軸回りの角速度を検出し、検出信号はA/Dコンバータ2でA/D変換される。また、車速センサ13は、車速パルスをカウンタ3へ出力し、カウンタ3は、車速パルスをカウントすることで車両速度情報を生成する。
【0025】
ギヤ位置検出部14は、車両のギヤ位置を検出するものである。以下、ギヤ位置としては、「P」(パーキング)、「R」(リバース)、「D」(ドライブ)、「N」(ニュートラル)の4種類があるものとして説明する。
【0026】
アクセル踏圧センサ15は、例えば、圧電素子で構成され、アクセルペダルの足を載置する面に設けられ、アクセルペダルの踏圧に応じた電圧信号をA/Dコンバータ4に出力する。なお、圧電素子は直接、アクセルペダルの足を載置する面に両面テープにより接着されていてもよいし、美観を考慮し圧電素子をアルミ箔製の袋で包んだものをアクセルペダルの足を載置する面に両面テープにより接着してもよい。A/Dコンバータ4は、アクセル踏圧センサ15が出力する電圧信号をA/D変換する。
【0027】
ブレーキ踏圧センサ16は、例えば、圧電素子で構成され、ブレーキペダルの足を載置する面に設けられ、ブレーキペダルの踏圧に応じた電圧信号をA/Dコンバータ5に出力する。なお、圧電素子の設け方は上述のアクセル踏圧センサ15の場合と同様としてよい。A/Dコンバータ5は、ブレーキ踏圧センサ16が出力する電圧信号をA/D変換する。
【0028】
制御部6は、不図示のCPU、ROM/RAM等から構成され、ナビゲーション装置100の制御を統括的に行う。また、制御部6は、GPS部1が出力する自車位置情報、A/Dコンバータ2が出力する角速度情報、カウンタ3が出力する車両速度情報に基づき自車位置を検出する。その他、制御部6は、経路探索等の各種処理も実行する。
【0029】
記憶装置7は、例えば、HDD(Hard Disk Drive)や半導体メモリで構成される大容量記憶装置であり、道路データと地図画像を含む地図データが記憶される。なお、地図データは、後述する駐車場データも含んでいる。
【0030】
ディスプレイ8は、地図画像や最適経路画像等、各種画像を表示して使用者が視認できるようにするためのものであり、例えば、液晶ディスプレイで構成される。
【0031】
音声出力部9は、経路案内における案内報知等、各種音声報知を行うものでありスピーカ等から構成される。
【0032】
入力部10は、各種操作入力を行うための各種ハードキー、タッチパネルから構成される。
【0033】
次に、ナビゲーション装置100が行う発車時の警告制御について説明する。
【0034】
ここでは、まず、警告制御に用いる駐車場データについて図2を用いて説明する。駐車場データは、記憶装置7に記憶された地図データに含まれ、駐車場毎のデータとなる。
【0035】
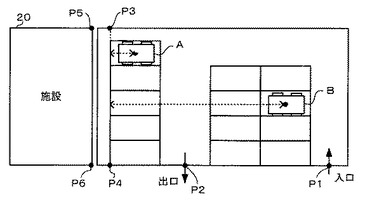
図2は、駐車場のレイアウトの一例を示す。駐車場データは、車両が進入する入口の位置座標P1および車両が退出する出口の位置座標P2を有している。また、駐車場データは、施設20(コンビニエンスストア等)の外壁沿いに配列される各駐車区画における各車止めが線上に存在するような線分の両端の各位置座標P3、P4も有している。
【0036】
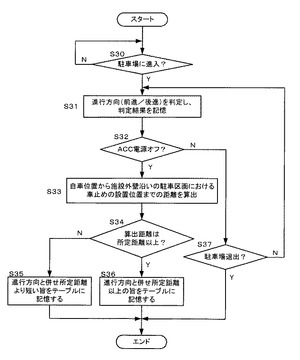
図3は、ナビゲーション装置100が行う停車時進行方向検出の一例に関するフローチャートである。
【0037】
まず、ステップS30で、制御部6は、検出した自車位置と、駐車場データに含まれる入口位置座標P1との対比により、車両が駐車場に進入したか否かを判定する。駐車場に進入していないと判定される間は(ステップS30のN)、判定を継続し、駐車場に進入したと判定されると(ステップS30のY)、ステップS31に進む。
【0038】
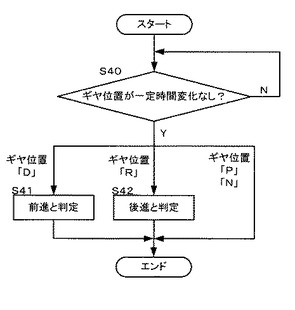
ステップS31で、制御部6は、車両の進行方向(前進または後進)を判定し、判定結果を記憶する。なお、判定結果は上書きで記憶する。
【0039】
図4に、ステップS31での進行方向判定に関する処理の一例を示す。まず、ステップS40で、制御部6は、ギヤ位置検出部14の検出信号を監視し、一定時間ギヤ位置が変化しなければ(ステップS40のY)、変化しないギヤ位置が「D」(ドライブ)であれば前進と判定し(ステップS41)、「R」(リバース)であれば後進と判定し(ステップS42)、「P」(パーキング)または「N」(ニュートラル)であれば判定をしない(この場合は、判定結果の記憶もされない)。また、一定時間が経過する前にギヤ位置が変化した場合は(ステップS40のN)、再び一定時間ギヤ位置が変化しないかを監視する。
【0040】
図3に説明を戻し、ステップS31の後、ステップS32に進み、制御部6は、ACC(アクセサリー)電源がオフになっているか否かを判定し、オフになっていなければ(ステップS32のN)、ステップS37に進む。ステップS37で、制御部6は、検出した自車位置と、駐車場データに含まれる出口位置座標P2との対比により、車両が駐車場から退出したか否かを判定する。もし、退出していなければ(ステップS37のN)、ステップS31に戻る。
【0041】
そして、ステップS32で、ACC電源がオフになっていれば(ステップS32のY)、ステップS33に進む。ステップS33で、制御部6は、ACC電源がオフ時に検出した自車位置と、駐車場データに含まれる各位置座標P3、P4を結ぶ線分との距離を算出する。即ち、自車位置と、施設外壁沿いに配列される各駐車区画における各車止めが線上に存在するような線分との距離を算出する。
【0042】
なお、上記ステップS32では、ACC電源がオフであるか否かに応じて処理を行っているが、これに限るものではなく、例えば、ギヤ位置が「P」(パーキング)、又は「N」(ニュートラル)に変化した場合に、ステップS32以降の処理を行うようにしてもよい。これは、駐車場においてACC電源を切ることなくACC電源はオン状態のままで停車する場合にも適用できるようにするためである。
【0043】
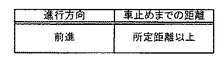
次に、ステップS34で、制御部6は、算出された距離が所定距離以上であるか否かを判定する。ここで、所定距離は、例えば、施設外壁沿いの駐車区画の長さとすればよい。もし、所定距離以上であれば(ステップS34のY)、ステップS36に進み、制御部6は、記憶している進行方向(停車時の進行方向)と併せて、所定距離以上である旨を示す情報を記憶装置7のデータテーブルに記憶させ、処理終了となる(エンド)。ここで、図5にデータテーブルの一例を示す。
【0044】
一方、算出された距離が所定距離以上でなければ(ステップS34)、ステップS35に進み、制御部6は、記憶している進行方向と併せて、所定距離より短い旨を示す情報を記憶装置7のデータテーブルに記憶させ、処理終了となる(エンド)。
【0045】
また、ステップS37で、駐車場から退出したと判定した場合は(ステップS37のY)、そのまま処理終了となる(エンド)。
【0046】
次に、ナビゲーション装置100が行う発車時の警告制御について図6のフローチャートを用いて説明する。図6のフローチャートは、車両のエンジンがオンになると開始される。
【0047】
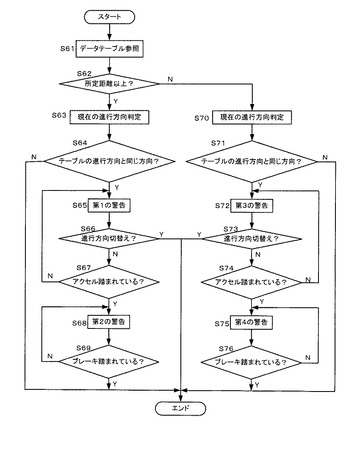
まず、ステップS61で、制御部6は、記憶装置7のデータテーブルを参照する。そして、ステップS62で、制御部6は、データテーブルで参照した距離に関する情報が所定距離以上を示していれば(ステップS62のY)、ステップS63に進む。
【0048】
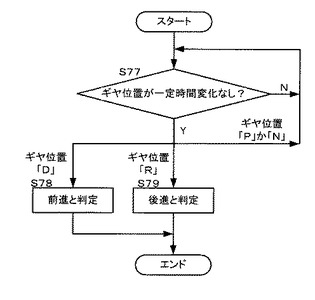
ステップS63で、制御部6は、現在の車両進行方向を判定する。ここで、図7に、進行方向判定に関する処理の一例を示す。まず、ステップS77で、制御部6は、ギヤ位置検出部14の検出信号を監視し、一定時間ギヤ位置が変化しなければ(ステップS77のY)、変化しないギヤ位置が「D」(ドライブ)であれば前進と判定し(ステップS78)、「R」(リバース)であれば後進と判定し(ステップS79)、「P」(パーキング)または「N」(ニュートラル)であればステップS77に戻る。また、一定時間が経過する前にギヤ位置が変化した場合は(ステップS77のN)、再び一定時間ギヤ位置が変化しないかを監視する。
【0049】
説明を図6に戻し、ステップS63の後、ステップS64で、制御部6は、データテーブルで参照した進行方向と、ステップS63で判定した進行方向が一致するか否かを判定する。もし一致している場合は(ステップS64のY)、ステップS65に進み、制御部6は、音声出力部9に第1の警告を行わせる。ここでは、例えば「近くの車両に突っ込みますよ!」といった音声を出力するようにすればよい。一方、一致していない場合は(ステップS64のN)、そのまま処理終了となる(エンド)。
【0050】
ステップS65の後、ステップS66で、制御部6は、ギヤ位置検出部14の検出信号によりギヤ位置を確認し、ステップS63で判定した進行方向から進行方向が切替えられているか否かを判定する。もし、切替えられていなければ(ステップS66のN)、ステップS67に進み、制御部6は、A/Dコンバータ4の出力に基づき、アクセルペダルが踏まれているか否かを判定する。アクセルペダルが踏まれていなければ(ステップS67のN)、ステップS65に戻り、再び第1の警告を行う。ステップS66で、進行方向が切替えられていれば(ステップS66のY)、処理終了となる(エンド)。
【0051】
アクセルペダルが踏まれていれば(ステップS67のY)、ステップS68に進み、制御部6は、音声出力部9に第2の警告を行わせる。第2の警告は、第1の警告よりも強くし、例えば「近くの車両に突っ込みます!非常に危険です!」といった音声を出力するようにすればよい。
【0052】
そして、ステップS69で、制御部6は、A/Dコンバータ5の出力に基づき、ブレーキペダルが踏まれているか否かを判定する。ブレーキペダルが踏まれていなければ(ステップS69のN)、ステップS68に戻り、再び第2の警告を行う。一方、ブレーキペダルが踏まれていれば(ステップS69のY)、処理終了となる(エンド)。
【0053】
また、ステップS62で、データテーブルで参照した距離に関する情報が所定距離より短い旨を示していれば(ステップS62のN)、ステップS70に進む。ステップS70で、制御部6は、現在の車両進行方向を判定する。ここでは、上述した図7で示す判定処理を行う。
【0054】
次に、ステップS71で、制御部6は、データテーブルで参照した進行方向と、ステップS70で判定した進行方向が一致するか否かを判定する。もし一致している場合は(ステップS71のY)、ステップS72に進み、制御部6は、音声出力部9に第3の警告を行わせる。ここでは、例えば「施設に突っ込みますよ!」といった音声を出力するようにすればよい。一方、一致していない場合は(ステップS71のN)、そのまま処理終了となる(エンド)。
【0055】
ステップS72の後、ステップS73で、制御部6は、ギヤ位置検出部14の検出信号によりギヤ位置を確認し、ステップS70で判定した進行方向から進行方向が切替えられているか否かを判定する。もし、切替えられていなければ(ステップS73のN)、ステップS74に進み、制御部6は、A/Dコンバータ4の出力に基づき、アクセルペダルが踏まれているか否かを判定する。アクセルペダルが踏まれていなければ(ステップS74のN)、ステップS72に戻り、再び第3の警告を行う。ステップS73で、進行方向が切替えられていれば(ステップS73のY)、処理終了となる(エンド)。
【0056】
アクセルペダルが踏まれていれば(ステップS74のY)、ステップS75に進み、制御部6は、音声出力部9に第4の警告を行わせる。第4の警告は、第3の警告よりも強くし、例えば「施設に突っ込みます!非常に危険です!」といった音声を出力するようにすればよい。
【0057】
そして、ステップS76で、制御部6は、A/Dコンバータ5の出力に基づき、ブレーキペダルが踏まれているか否かを判定する。ブレーキペダルが踏まれていなければ(ステップS76のN)、ステップS75に戻り、再び第4の警告を行う。一方、ブレーキペダルが踏まれていれば(ステップS76のY)、処理終了となる(エンド)。
【0058】
このような実施形態によれば、停車の際、車両進行方向と併せて自車位置が施設沿いの駐車区画における車止めの位置から所定距離以上離れているか否かを示す情報が記憶装置7に記憶される。そして、エンジンがオンとなり発車する際、所定距離以上であれば(例えば図2中車両Bの位置)、記憶された進行方向と現在の進行方向が一致した場合、危険な状況であるとして第1の警告(近くの車両に衝突)がされる。また、所定距離より短ければ(例えば図2中車両Aの位置)、記憶された進行方向と現在の進行方向が一致した場合、危険な状況であるとして第3の警告(施設に衝突)がされる。このように警告内容を変えることで、ユーザは危険な状況の内容が分かり易くなる。
【0059】
なお、上記実施形態において、記憶装置7のテーブルには、所定距離以上か否かの旨の情報ではなく、算出した距離自体を記憶させるようにしてもよい。この場合は、発車の際にテーブルの距離が所定距離以上か否かを判定し、判定結果に応じて警告を変えるようにすればよい。
【0060】
また、ステップS33(図3)で算出する距離は、自車位置と、施設外壁の両端の各位置座標P5、P6(図2参照)を結んだ線分との距離を算出するようにしてもよい。この場合のステップS34における所定距離は、例えば、施設外壁沿いの駐車区画の長さに、施設外壁から駐車区画までの距離を加算した距離とすればよい。
【0061】
次に、別の実施形態について説明する。
【0062】
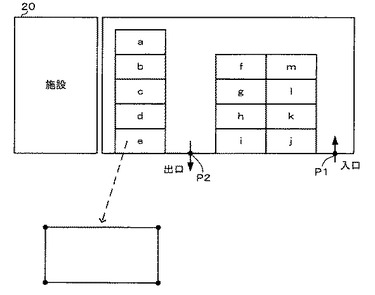
図8に、駐車場のレイアウトの一例を示す。記憶装置7に記憶される駐車場データとしては、入口位置座標P1、出口位置座標P2に加えて、各駐車区画(図8であれば駐車区画a〜m)の矩形四隅の位置座標を有するようにする。
【0063】
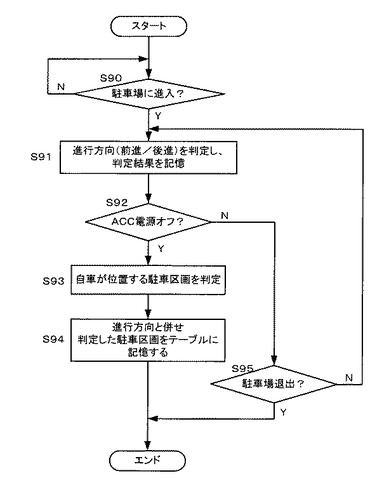
図9は、ナビゲーション装置100が行う停車時進行方向検出の別実施形態に関するフローチャートである。ステップS90〜ステップS92は、上述した図3のステップS30〜ステップS32と同様である。
【0064】
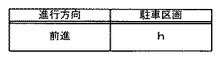
そして、ステップS92で、ACC電源がオフになっていれば(ステップS92のY)、ステップS93に進み、制御部6は、検出した自車位置と駐車場データの各駐車区画の四隅位置座標とに基づき、自車が位置する駐車区画を判定する。そして、ステップS94で、制御部6は、記憶している進行方向と併せて、判定した駐車区画を記憶装置7のデータテーブルに記憶させ、処理終了となる。ここで、図10にデータテーブルの一例を示す。
【0065】
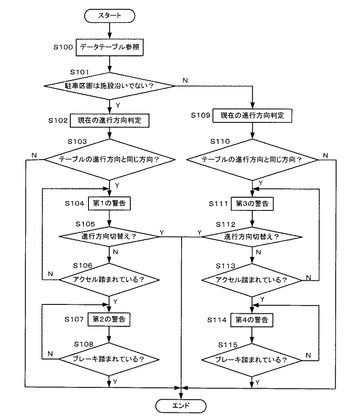
図11は、ナビゲーション装置100が行う発車時の警告制御の別実施形態を示す。図11のフローチャートは、車両のエンジンがオンになると開始される。
【0066】
まず、ステップS100で、制御部6は、記憶装置7のデータテーブルを参照する。そして、ステップS101で、データテーブルで参照した駐車区画が施設沿いでないかを判定し、施設沿いでなければ(ステップS101のY)、ステップS102に進み、施設沿いであれば(ステップS101のN)、ステップS109に進む。図8の例であれば、駐車区画a〜eであれば施設沿いと判定され、駐車区画f〜mであれば施設沿いでないと判定される。ステップS102以降については、上述した図6のステップS63以降と同様であるので詳述を省く。
【0067】
このような実施形態によれば、停車の際、車両進行方向と併せて自車が位置する駐車区画が記憶装置7に記憶される。そして、エンジンがオンとなり発車する際、記憶された進行方向と現在の進行方向が一致した場合、自車が位置する駐車区画が施設沿いでなければ、危険な状況であるとして第1の警告(近くの車両に衝突)がされる。また、記憶された進行方向と現在の進行方向が一致した場合、自車が位置する駐車区画が施設沿いであれば、危険な状況であるとして第3の警告(施設に衝突)がされる。このように警告内容を変えることで、ユーザは危険な状況の内容が分かり易くなる。
【0068】
以上、本発明の実施形態について説明したが、本発明の趣旨の範囲内であれば、実施形態は種々変更が可能である。
【0069】
例えば、警告には、音声出力部9のみでなく、ディスプレイ8をさらに用いてもよい。
【0070】
また、本発明は、車載用ナビゲーション装置に限らず、車載用オーディオ機器などの他の車載用電子機器にも適用可能である。
【符号の説明】
【0071】
1 GPS部
2 A/Dコンバータ
3 カウンタ
4 A/Dコンバータ
5 A/Dコンバータ
6 制御部
7 記憶装置
8 ディスプレイ
9 音声出力部
10 入力部
11 GPSアンテナ
12 角速度センサ
13 車速センサ
14 ギヤ位置検出部
15 アクセル踏圧センサ
16 ブレーキ踏圧センサ
100 ナビゲーション装置
20 施設
A、B 車両
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置を始めとする車載用電子機器による警告制御に関する。
【背景技術】
【0002】
従来から、ドライバの誤操作による車両事故がしばしば発生しており、これを防止する様々な技術が開発されてきた。
【0003】
例えば、特許文献1には、車両が停車する際の進行方向を判定し、その判定結果を記憶し、発車の際に進行方向を判定し、その判定された進行方向と上記記憶した進行方向とを比較し、両者が一致すれば、発車時進行方向は安全でないとして警告するような発車時事故防止装置が開示されている。警告は、例えば「シフト位置を確認して下さい」というような音声を繰り返し出力するとしている。
【0004】
これにより、停車の際の車両の進行方向と同じ方向に発車させることができない停車場所から、その発車させることができない方向に発車することで生じる事故を未然に防止できるとしている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−126940号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、車両を駐車する際、施設(コンビニエンスストア等)沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とがある。施設沿いの駐車区画に駐車する場合は、停車時の進行方向と発車時の進行方向が一致する場合には、施設に衝突する危険性がある。一方、施設から離れた位置にある駐車区画に駐車する場合は、停車時の進行方向と発車時の進行方向が一致する場合には、近くに駐車された他の車両に衝突する危険性がある。
【0007】
このように、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とでは、危険な状況の内容が異なるにも関わらず、上記特許文献1の発車時事故防止装置では、いずれの場合も同じ内容の警告がされることになり、ユーザは危険な状況の内容が分かりにくいといった問題があった。
【0008】
上記問題点を鑑み、本発明は、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、前回停車時の進行方向と発車時の進行方向が一致する場合に、危険な状況の内容をユーザに分かり易くすることができる車載用電子機器を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明の車載用電子機器は、警告を行う警告部と、車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に、前記判定部による判定結果に応じて異なった警告を前記警告部に行わせる警告制御部とを備えた構成とする(第1の構成)。
【0010】
このような構成によれば、発車時の進行方向と前回停車時の進行方向が一致する場合に、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、警告内容を変えて警告するので、ユーザは危険な状況の内容が分かり易くなる。
【0011】
また、上記第1の構成において、停車の際に自車位置と前記施設沿いの駐車区画における車止めが線上に存在するような線分または前記施設外壁の両端を結ぶ線分との距離を算出する距離算出部を備え、前記判定部は、前記算出された距離が所定距離より短いか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定する構成としてもよい(第2の構成)。
【0012】
また、上記第1の構成において、停車の際に自車位置と駐車区画の位置座標とに基づき自車が位置する駐車区画を判定する駐車区画判定部を備え、前記判定部は、前記判定された駐車区画が前記施設沿いであるか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定する構成としてもよい(第3の構成)。
【0013】
また、上記いずれかの構成において、前記警告制御部は、前記警告を前記警告部に行わせた後、車両進行方向が切替えられたか否かを判定し、切替えられていない場合、アクセルペダルが踏まれているか否かを判定し、前記アクセルペダルが踏まれている場合、前記警告よりも強い警告を前記警告部に行わせる構成としてもよい(第4の構成)。
【0014】
このような構成によれば、警告後も進行方向が切替えられておらず、しかもアクセルペダルが踏まれていれば、非常に危険な状況であるので、より強い警告を行うことでユーザに注意を促すことができる。
【0015】
また、この構成において、前記警告制御部は、前記警告よりも強い警告を前記警告部に行わせた後、ブレーキペダルが踏まれているか否かを判定し、踏まれていない場合、再び前記警告よりも強い警告を前記警告部に行わせる構成としてもよい(第5の構成)。
【0016】
このような構成によれば、強い警告を行った後にブレーキペダルが未だ踏まれていなければ、非常に危険な状況が続いているので、再び強い警告を行ってユーザに注意を促すことができる。
【0017】
また、上記第4または第5の構成において、前記警告制御部は、前記アクセルペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記アクセルペダルが踏まれているか否かを判定する構成としてもよい(第6の構成)。
【0018】
また、上記第5の構成において、前記警告制御部は、前記ブレーキペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記ブレーキペダルが踏まれているか否かを判定する構成としてもよい(第7の構成)。
【発明の効果】
【0019】
本発明の車載用電子機器によれば、前回停車時の進行方向と発車時の進行方向が一致する場合に、施設沿いの駐車区画に駐車する場合と、施設から離れた位置にある駐車区画に駐車する場合とで、警告内容を変えるので、危険な状況の内容をユーザに分かり易くすることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施形態に係るナビゲーション装置のブロック構成図である。
【図2】駐車場のレイアウトの一例を示す図である。
【図3】本発明に係る停車時進行方向検出の一例に関するフローチャートである。
【図4】本発明に係る進行方向判定処理の一例に関するフローチャートである。
【図5】本発明に係るデータテーブルの一例を示す図である。
【図6】本発明に係る発車時の警告制御の一例に関するフローチャートである。
【図7】本発明に係る進行方向判定処理の一例に関するフローチャートである。
【図8】駐車場のレイアウトの一例を示す図である。
【図9】本発明に係る停車時進行方向検出の別実施形態に関するフローチャートである。
【図10】本発明に係るデータテーブルの別の一例を示す図である。
【図11】本発明に係る発車時の警告制御の別実施形態に関するフローチャートである。
【発明を実施するための形態】
【0021】
以下に本発明の実施形態を図面を参照して説明する。図1は、本発明の一実施形態に係るナビゲーション装置100のブロック構成図を示す。
【0022】
ナビゲーション装置100は、車両に搭載され、GPS部1と、A/Dコンバータ2と、カウンタ3と、A/Dコンバータ4と、A/Dコンバータ5と、制御部6と、記憶装置7と、ディスプレイ8と、音声出力部9と、入力部10と、を備えている。
【0023】
GPS部1は、車両に設けられるGPSアンテナ11に接続され、GPSアンテナ11から受信するGPS信号に基づき現在の車両位置を示す自車位置情報を生成する。
【0024】
角速度センサ12は、車両のヨー軸回りの角速度を検出し、検出信号はA/Dコンバータ2でA/D変換される。また、車速センサ13は、車速パルスをカウンタ3へ出力し、カウンタ3は、車速パルスをカウントすることで車両速度情報を生成する。
【0025】
ギヤ位置検出部14は、車両のギヤ位置を検出するものである。以下、ギヤ位置としては、「P」(パーキング)、「R」(リバース)、「D」(ドライブ)、「N」(ニュートラル)の4種類があるものとして説明する。
【0026】
アクセル踏圧センサ15は、例えば、圧電素子で構成され、アクセルペダルの足を載置する面に設けられ、アクセルペダルの踏圧に応じた電圧信号をA/Dコンバータ4に出力する。なお、圧電素子は直接、アクセルペダルの足を載置する面に両面テープにより接着されていてもよいし、美観を考慮し圧電素子をアルミ箔製の袋で包んだものをアクセルペダルの足を載置する面に両面テープにより接着してもよい。A/Dコンバータ4は、アクセル踏圧センサ15が出力する電圧信号をA/D変換する。
【0027】
ブレーキ踏圧センサ16は、例えば、圧電素子で構成され、ブレーキペダルの足を載置する面に設けられ、ブレーキペダルの踏圧に応じた電圧信号をA/Dコンバータ5に出力する。なお、圧電素子の設け方は上述のアクセル踏圧センサ15の場合と同様としてよい。A/Dコンバータ5は、ブレーキ踏圧センサ16が出力する電圧信号をA/D変換する。
【0028】
制御部6は、不図示のCPU、ROM/RAM等から構成され、ナビゲーション装置100の制御を統括的に行う。また、制御部6は、GPS部1が出力する自車位置情報、A/Dコンバータ2が出力する角速度情報、カウンタ3が出力する車両速度情報に基づき自車位置を検出する。その他、制御部6は、経路探索等の各種処理も実行する。
【0029】
記憶装置7は、例えば、HDD(Hard Disk Drive)や半導体メモリで構成される大容量記憶装置であり、道路データと地図画像を含む地図データが記憶される。なお、地図データは、後述する駐車場データも含んでいる。
【0030】
ディスプレイ8は、地図画像や最適経路画像等、各種画像を表示して使用者が視認できるようにするためのものであり、例えば、液晶ディスプレイで構成される。
【0031】
音声出力部9は、経路案内における案内報知等、各種音声報知を行うものでありスピーカ等から構成される。
【0032】
入力部10は、各種操作入力を行うための各種ハードキー、タッチパネルから構成される。
【0033】
次に、ナビゲーション装置100が行う発車時の警告制御について説明する。
【0034】
ここでは、まず、警告制御に用いる駐車場データについて図2を用いて説明する。駐車場データは、記憶装置7に記憶された地図データに含まれ、駐車場毎のデータとなる。
【0035】
図2は、駐車場のレイアウトの一例を示す。駐車場データは、車両が進入する入口の位置座標P1および車両が退出する出口の位置座標P2を有している。また、駐車場データは、施設20(コンビニエンスストア等)の外壁沿いに配列される各駐車区画における各車止めが線上に存在するような線分の両端の各位置座標P3、P4も有している。
【0036】
図3は、ナビゲーション装置100が行う停車時進行方向検出の一例に関するフローチャートである。
【0037】
まず、ステップS30で、制御部6は、検出した自車位置と、駐車場データに含まれる入口位置座標P1との対比により、車両が駐車場に進入したか否かを判定する。駐車場に進入していないと判定される間は(ステップS30のN)、判定を継続し、駐車場に進入したと判定されると(ステップS30のY)、ステップS31に進む。
【0038】
ステップS31で、制御部6は、車両の進行方向(前進または後進)を判定し、判定結果を記憶する。なお、判定結果は上書きで記憶する。
【0039】
図4に、ステップS31での進行方向判定に関する処理の一例を示す。まず、ステップS40で、制御部6は、ギヤ位置検出部14の検出信号を監視し、一定時間ギヤ位置が変化しなければ(ステップS40のY)、変化しないギヤ位置が「D」(ドライブ)であれば前進と判定し(ステップS41)、「R」(リバース)であれば後進と判定し(ステップS42)、「P」(パーキング)または「N」(ニュートラル)であれば判定をしない(この場合は、判定結果の記憶もされない)。また、一定時間が経過する前にギヤ位置が変化した場合は(ステップS40のN)、再び一定時間ギヤ位置が変化しないかを監視する。
【0040】
図3に説明を戻し、ステップS31の後、ステップS32に進み、制御部6は、ACC(アクセサリー)電源がオフになっているか否かを判定し、オフになっていなければ(ステップS32のN)、ステップS37に進む。ステップS37で、制御部6は、検出した自車位置と、駐車場データに含まれる出口位置座標P2との対比により、車両が駐車場から退出したか否かを判定する。もし、退出していなければ(ステップS37のN)、ステップS31に戻る。
【0041】
そして、ステップS32で、ACC電源がオフになっていれば(ステップS32のY)、ステップS33に進む。ステップS33で、制御部6は、ACC電源がオフ時に検出した自車位置と、駐車場データに含まれる各位置座標P3、P4を結ぶ線分との距離を算出する。即ち、自車位置と、施設外壁沿いに配列される各駐車区画における各車止めが線上に存在するような線分との距離を算出する。
【0042】
なお、上記ステップS32では、ACC電源がオフであるか否かに応じて処理を行っているが、これに限るものではなく、例えば、ギヤ位置が「P」(パーキング)、又は「N」(ニュートラル)に変化した場合に、ステップS32以降の処理を行うようにしてもよい。これは、駐車場においてACC電源を切ることなくACC電源はオン状態のままで停車する場合にも適用できるようにするためである。
【0043】
次に、ステップS34で、制御部6は、算出された距離が所定距離以上であるか否かを判定する。ここで、所定距離は、例えば、施設外壁沿いの駐車区画の長さとすればよい。もし、所定距離以上であれば(ステップS34のY)、ステップS36に進み、制御部6は、記憶している進行方向(停車時の進行方向)と併せて、所定距離以上である旨を示す情報を記憶装置7のデータテーブルに記憶させ、処理終了となる(エンド)。ここで、図5にデータテーブルの一例を示す。
【0044】
一方、算出された距離が所定距離以上でなければ(ステップS34)、ステップS35に進み、制御部6は、記憶している進行方向と併せて、所定距離より短い旨を示す情報を記憶装置7のデータテーブルに記憶させ、処理終了となる(エンド)。
【0045】
また、ステップS37で、駐車場から退出したと判定した場合は(ステップS37のY)、そのまま処理終了となる(エンド)。
【0046】
次に、ナビゲーション装置100が行う発車時の警告制御について図6のフローチャートを用いて説明する。図6のフローチャートは、車両のエンジンがオンになると開始される。
【0047】
まず、ステップS61で、制御部6は、記憶装置7のデータテーブルを参照する。そして、ステップS62で、制御部6は、データテーブルで参照した距離に関する情報が所定距離以上を示していれば(ステップS62のY)、ステップS63に進む。
【0048】
ステップS63で、制御部6は、現在の車両進行方向を判定する。ここで、図7に、進行方向判定に関する処理の一例を示す。まず、ステップS77で、制御部6は、ギヤ位置検出部14の検出信号を監視し、一定時間ギヤ位置が変化しなければ(ステップS77のY)、変化しないギヤ位置が「D」(ドライブ)であれば前進と判定し(ステップS78)、「R」(リバース)であれば後進と判定し(ステップS79)、「P」(パーキング)または「N」(ニュートラル)であればステップS77に戻る。また、一定時間が経過する前にギヤ位置が変化した場合は(ステップS77のN)、再び一定時間ギヤ位置が変化しないかを監視する。
【0049】
説明を図6に戻し、ステップS63の後、ステップS64で、制御部6は、データテーブルで参照した進行方向と、ステップS63で判定した進行方向が一致するか否かを判定する。もし一致している場合は(ステップS64のY)、ステップS65に進み、制御部6は、音声出力部9に第1の警告を行わせる。ここでは、例えば「近くの車両に突っ込みますよ!」といった音声を出力するようにすればよい。一方、一致していない場合は(ステップS64のN)、そのまま処理終了となる(エンド)。
【0050】
ステップS65の後、ステップS66で、制御部6は、ギヤ位置検出部14の検出信号によりギヤ位置を確認し、ステップS63で判定した進行方向から進行方向が切替えられているか否かを判定する。もし、切替えられていなければ(ステップS66のN)、ステップS67に進み、制御部6は、A/Dコンバータ4の出力に基づき、アクセルペダルが踏まれているか否かを判定する。アクセルペダルが踏まれていなければ(ステップS67のN)、ステップS65に戻り、再び第1の警告を行う。ステップS66で、進行方向が切替えられていれば(ステップS66のY)、処理終了となる(エンド)。
【0051】
アクセルペダルが踏まれていれば(ステップS67のY)、ステップS68に進み、制御部6は、音声出力部9に第2の警告を行わせる。第2の警告は、第1の警告よりも強くし、例えば「近くの車両に突っ込みます!非常に危険です!」といった音声を出力するようにすればよい。
【0052】
そして、ステップS69で、制御部6は、A/Dコンバータ5の出力に基づき、ブレーキペダルが踏まれているか否かを判定する。ブレーキペダルが踏まれていなければ(ステップS69のN)、ステップS68に戻り、再び第2の警告を行う。一方、ブレーキペダルが踏まれていれば(ステップS69のY)、処理終了となる(エンド)。
【0053】
また、ステップS62で、データテーブルで参照した距離に関する情報が所定距離より短い旨を示していれば(ステップS62のN)、ステップS70に進む。ステップS70で、制御部6は、現在の車両進行方向を判定する。ここでは、上述した図7で示す判定処理を行う。
【0054】
次に、ステップS71で、制御部6は、データテーブルで参照した進行方向と、ステップS70で判定した進行方向が一致するか否かを判定する。もし一致している場合は(ステップS71のY)、ステップS72に進み、制御部6は、音声出力部9に第3の警告を行わせる。ここでは、例えば「施設に突っ込みますよ!」といった音声を出力するようにすればよい。一方、一致していない場合は(ステップS71のN)、そのまま処理終了となる(エンド)。
【0055】
ステップS72の後、ステップS73で、制御部6は、ギヤ位置検出部14の検出信号によりギヤ位置を確認し、ステップS70で判定した進行方向から進行方向が切替えられているか否かを判定する。もし、切替えられていなければ(ステップS73のN)、ステップS74に進み、制御部6は、A/Dコンバータ4の出力に基づき、アクセルペダルが踏まれているか否かを判定する。アクセルペダルが踏まれていなければ(ステップS74のN)、ステップS72に戻り、再び第3の警告を行う。ステップS73で、進行方向が切替えられていれば(ステップS73のY)、処理終了となる(エンド)。
【0056】
アクセルペダルが踏まれていれば(ステップS74のY)、ステップS75に進み、制御部6は、音声出力部9に第4の警告を行わせる。第4の警告は、第3の警告よりも強くし、例えば「施設に突っ込みます!非常に危険です!」といった音声を出力するようにすればよい。
【0057】
そして、ステップS76で、制御部6は、A/Dコンバータ5の出力に基づき、ブレーキペダルが踏まれているか否かを判定する。ブレーキペダルが踏まれていなければ(ステップS76のN)、ステップS75に戻り、再び第4の警告を行う。一方、ブレーキペダルが踏まれていれば(ステップS76のY)、処理終了となる(エンド)。
【0058】
このような実施形態によれば、停車の際、車両進行方向と併せて自車位置が施設沿いの駐車区画における車止めの位置から所定距離以上離れているか否かを示す情報が記憶装置7に記憶される。そして、エンジンがオンとなり発車する際、所定距離以上であれば(例えば図2中車両Bの位置)、記憶された進行方向と現在の進行方向が一致した場合、危険な状況であるとして第1の警告(近くの車両に衝突)がされる。また、所定距離より短ければ(例えば図2中車両Aの位置)、記憶された進行方向と現在の進行方向が一致した場合、危険な状況であるとして第3の警告(施設に衝突)がされる。このように警告内容を変えることで、ユーザは危険な状況の内容が分かり易くなる。
【0059】
なお、上記実施形態において、記憶装置7のテーブルには、所定距離以上か否かの旨の情報ではなく、算出した距離自体を記憶させるようにしてもよい。この場合は、発車の際にテーブルの距離が所定距離以上か否かを判定し、判定結果に応じて警告を変えるようにすればよい。
【0060】
また、ステップS33(図3)で算出する距離は、自車位置と、施設外壁の両端の各位置座標P5、P6(図2参照)を結んだ線分との距離を算出するようにしてもよい。この場合のステップS34における所定距離は、例えば、施設外壁沿いの駐車区画の長さに、施設外壁から駐車区画までの距離を加算した距離とすればよい。
【0061】
次に、別の実施形態について説明する。
【0062】
図8に、駐車場のレイアウトの一例を示す。記憶装置7に記憶される駐車場データとしては、入口位置座標P1、出口位置座標P2に加えて、各駐車区画(図8であれば駐車区画a〜m)の矩形四隅の位置座標を有するようにする。
【0063】
図9は、ナビゲーション装置100が行う停車時進行方向検出の別実施形態に関するフローチャートである。ステップS90〜ステップS92は、上述した図3のステップS30〜ステップS32と同様である。
【0064】
そして、ステップS92で、ACC電源がオフになっていれば(ステップS92のY)、ステップS93に進み、制御部6は、検出した自車位置と駐車場データの各駐車区画の四隅位置座標とに基づき、自車が位置する駐車区画を判定する。そして、ステップS94で、制御部6は、記憶している進行方向と併せて、判定した駐車区画を記憶装置7のデータテーブルに記憶させ、処理終了となる。ここで、図10にデータテーブルの一例を示す。
【0065】
図11は、ナビゲーション装置100が行う発車時の警告制御の別実施形態を示す。図11のフローチャートは、車両のエンジンがオンになると開始される。
【0066】
まず、ステップS100で、制御部6は、記憶装置7のデータテーブルを参照する。そして、ステップS101で、データテーブルで参照した駐車区画が施設沿いでないかを判定し、施設沿いでなければ(ステップS101のY)、ステップS102に進み、施設沿いであれば(ステップS101のN)、ステップS109に進む。図8の例であれば、駐車区画a〜eであれば施設沿いと判定され、駐車区画f〜mであれば施設沿いでないと判定される。ステップS102以降については、上述した図6のステップS63以降と同様であるので詳述を省く。
【0067】
このような実施形態によれば、停車の際、車両進行方向と併せて自車が位置する駐車区画が記憶装置7に記憶される。そして、エンジンがオンとなり発車する際、記憶された進行方向と現在の進行方向が一致した場合、自車が位置する駐車区画が施設沿いでなければ、危険な状況であるとして第1の警告(近くの車両に衝突)がされる。また、記憶された進行方向と現在の進行方向が一致した場合、自車が位置する駐車区画が施設沿いであれば、危険な状況であるとして第3の警告(施設に衝突)がされる。このように警告内容を変えることで、ユーザは危険な状況の内容が分かり易くなる。
【0068】
以上、本発明の実施形態について説明したが、本発明の趣旨の範囲内であれば、実施形態は種々変更が可能である。
【0069】
例えば、警告には、音声出力部9のみでなく、ディスプレイ8をさらに用いてもよい。
【0070】
また、本発明は、車載用ナビゲーション装置に限らず、車載用オーディオ機器などの他の車載用電子機器にも適用可能である。
【符号の説明】
【0071】
1 GPS部
2 A/Dコンバータ
3 カウンタ
4 A/Dコンバータ
5 A/Dコンバータ
6 制御部
7 記憶装置
8 ディスプレイ
9 音声出力部
10 入力部
11 GPSアンテナ
12 角速度センサ
13 車速センサ
14 ギヤ位置検出部
15 アクセル踏圧センサ
16 ブレーキ踏圧センサ
100 ナビゲーション装置
20 施設
A、B 車両
【特許請求の範囲】
【請求項1】
警告を行う警告部と、
車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、
発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に、前記判定部による判定結果に応じて異なった警告を前記警告部に行わせる警告制御部と、を備えたことを特徴とする車載用電子機器。
【請求項2】
停車の際に自車位置と前記施設沿いの駐車区画における車止めが線上に存在するような線分または前記施設外壁の両端を結ぶ線分との距離を算出する距離算出部を備え、
前記判定部は、前記算出された距離が所定距離より短いか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定することを特徴とする請求項1に記載の車載用電子機器。
【請求項3】
停車の際に自車位置と駐車区画の位置座標とに基づき自車が位置する駐車区画を判定する駐車区画判定部を備え、
前記判定部は、判定された前記駐車区画が前記施設沿いであるか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定することを特徴とする請求項1に記載の車載用電子機器。
【請求項4】
前記警告制御部は、前記警告を前記警告部に行わせた後、車両進行方向が切替えられたか否かを判定し、切替えられていない場合、アクセルペダルが踏まれているか否かを判定し、前記アクセルペダルが踏まれている場合、前記警告よりも強い警告を前記警告部に行わせることを特徴とする請求項1〜請求項3のいずれかに記載の車載用電子機器。
【請求項5】
前記警告制御部は、前記警告よりも強い警告を前記警告部に行わせた後、ブレーキペダルが踏まれているか否かを判定し、踏まれていない場合、再び前記警告よりも強い警告を前記警告部に行わせることを特徴とする請求項4に記載の車載用電子機器。
【請求項6】
前記警告制御部は、前記アクセルペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記アクセルペダルが踏まれているか否かを判定することを特徴とする請求項4または請求項5に記載の車載用電子機器。
【請求項7】
前記警告制御部は、前記ブレーキペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記ブレーキペダルが踏まれているか否かを判定することを特徴とする請求項5に記載の車載用電子機器。
【請求項1】
警告を行う警告部と、
車両が発車する際に施設沿いの駐車区画に自車が位置するか否かを判定する判定部と、
発車時の車両進行方向が前回停車時の車両進行方向と一致した場合に、前記判定部による判定結果に応じて異なった警告を前記警告部に行わせる警告制御部と、を備えたことを特徴とする車載用電子機器。
【請求項2】
停車の際に自車位置と前記施設沿いの駐車区画における車止めが線上に存在するような線分または前記施設外壁の両端を結ぶ線分との距離を算出する距離算出部を備え、
前記判定部は、前記算出された距離が所定距離より短いか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定することを特徴とする請求項1に記載の車載用電子機器。
【請求項3】
停車の際に自車位置と駐車区画の位置座標とに基づき自車が位置する駐車区画を判定する駐車区画判定部を備え、
前記判定部は、判定された前記駐車区画が前記施設沿いであるか否かを判定することで、施設沿いの駐車区画に自車が位置するか否かを判定することを特徴とする請求項1に記載の車載用電子機器。
【請求項4】
前記警告制御部は、前記警告を前記警告部に行わせた後、車両進行方向が切替えられたか否かを判定し、切替えられていない場合、アクセルペダルが踏まれているか否かを判定し、前記アクセルペダルが踏まれている場合、前記警告よりも強い警告を前記警告部に行わせることを特徴とする請求項1〜請求項3のいずれかに記載の車載用電子機器。
【請求項5】
前記警告制御部は、前記警告よりも強い警告を前記警告部に行わせた後、ブレーキペダルが踏まれているか否かを判定し、踏まれていない場合、再び前記警告よりも強い警告を前記警告部に行わせることを特徴とする請求項4に記載の車載用電子機器。
【請求項6】
前記警告制御部は、前記アクセルペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記アクセルペダルが踏まれているか否かを判定することを特徴とする請求項4または請求項5に記載の車載用電子機器。
【請求項7】
前記警告制御部は、前記ブレーキペダルの足を載置する面に設けられた踏圧センサの検出信号に基づき、前記ブレーキペダルが踏まれているか否かを判定することを特徴とする請求項5に記載の車載用電子機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−248707(P2011−248707A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−122437(P2010−122437)
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月28日(2010.5.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(000214892)三洋電機コンシューマエレクトロニクス株式会社 (1,582)
【Fターム(参考)】
[ Back to top ]