
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、車載用頭部位置検出装置、車載用表示装置及び運転支援装置に関する。
【背景技術】
【0002】
車両の運転者に光束を投影するヘッドアップディスプレイ(HUD:Head Up Display)がある。運転者の頭部は運転中に移動する。移動した頭部の位置に光束を投影するために、運転者の頭部の位置を正確に検出する技術の実現が望まれている。特に、HUDの中でも運転者の片目に光束を投影する構成においては特に高い精度で頭部の位置を検出することが求められる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−341383号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の実施形態は、頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【課題を解決するための手段】
【0005】
本発明の実施形態によれば、複数の送受信器と、送受信制御部と、を備えた車載用頭部位置検出装置が提供される。前記複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。前記複数の送受信器は、前記頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、前記波が前記頭部によって反射されて得られる波を受信する。前記送受信制御部は、前記複数の送受信器に接続される。前記送受信制御部は、第1動作と、第2動作と、を実施する。前記第1動作は、前記複数の送受信器のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波を前記頭部に向けて送信させる第1送信動作と、前記第1送信波が前記頭部によって反射されて得られる第1反射波を前記複数の送受信器で受信した結果を入手する第1受信動作と、前記入手した前記第1反射波を受信した前記結果に基づいて複数の送受信器のうちで前記頭部に最も近い前記送受信器を検出する送受信器検出動作と、を含む。前記第2動作は、前記検出された前記頭部に最も近い前記送受信器に、音波及び電磁波の少なくともいずれかの頭部検出波を前記頭部に向けて送信させる頭部検出波送信動作と、前記頭部検出波が前記頭部によって反射されて得られる頭部検出反射波を前記複数の送受信器で受信した結果を入手する頭部検出反射波受信動作と、前記入手した前記頭部検出反射波を受信した前記結果に基づいて前記頭部の位置を検出する頭部位置検出動作と、を含む。
【図面の簡単な説明】
【0006】
【図1】実施形態に係る車載用頭部位置検出装置の動作を示すフローチャート図である。
【図2】図2(a)〜図2(c)は、実施形態に係る車載用頭部位置検出装置を示す模式図である。
【図3】図3(a)〜図3(d)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図4】図4(a)〜図4(f)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図5】図5(a)及び図5(b)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図6】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図7】図7(a)及び図7(b)は、実施形態に係る車載用頭部位置検出装置の別の動作を示す模式図である。
【図8】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図9】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図10】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図11】図11(a)〜図11(d)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図12】実施形態に係る車載用表示装置を示す模式図である。
【図13】実施形態に係る車載用表示装置を示すフローチャート図である。
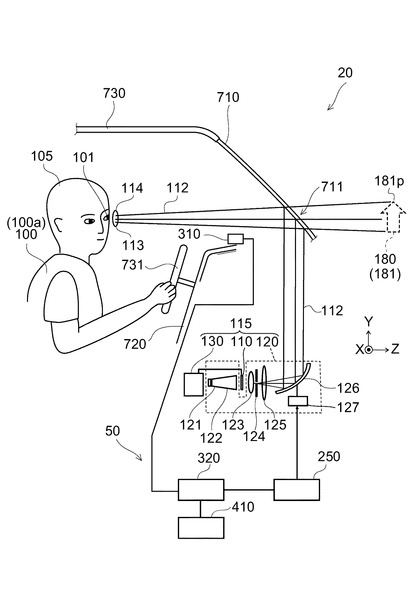
【図14】実施形態に係る運転支援装置を示す模式図である。
【発明を実施するための形態】
【0007】
以下に、各実施形態について図面を参照しつつ説明する。
なお、図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
なお、本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
(第1の実施形態)
図1は、本実施形態に係る車載用頭部位置検出装置の動作を例示するフローチャート図である。
図2(a)〜図2(c)は、本実施形態に係る車載用頭部位置検出装置の構成を例示する模式図である。
【0009】
図2(a)に表したように、本実施形態に係る車載用頭部位置検出装置50は、複数の送受信器310と、送受信制御部320と、を備える。
【0010】
複数の送受信器310は、車両に搭乗する搭乗者100aの頭部105に対向する互いに異なる位置に設けられる。複数の送受信器310は、頭部105に向けて、音波及び電磁波の少なくともいずれかの波(送信波350)を送信する。複数の送受信器310は、その波(送信波350)が頭部105によって反射して得られる波(反射波360)を受信する。例えば、複数の送受信器310は、頭部105に面している。例えば、送受信器310と頭部105の間に遮蔽物が入らないように、送受信器310は設置される。ただし、送受信への悪影響が実質的に無ければ良い。
【0011】
送受信制御部320は、複数の送受信器310に接続される。送受信制御部320と、複数の送受信器310と、は、電気信号や光信号などの有線または無線の方式により接続される。例えば、送受信制御部320は、複数の送受信器310による送信波350の送信のための送信制御信号SCSを複数の送受信器310に供給する。また、送受信制御部320は、複数の送受信器310による反射波360の受信の結果を入手するための受信制御信号RCSを有することができる。
【0012】
例えば、送信波350は音波あり、反射波360は音波である。例えば、送信波350は光であり、反射波360は光である。例えば、送信波350は赤外線であり、反射波360は赤外線である。例えば、送信波350は電波であり、反射波360は電波である。
【0013】
送信波350が音波であり反射波360が音波である場合には、音波よりも高速な光をつかった場合でも、その光モジュールの出力が音波を使った場合よりも遅い事もあるため、音波を使ったほうが処理を高速化できる利点がある。送信波350が超音波である場合には、送受信の時間と受信結果の処理の時間との合計は、例えば10ミリ秒(ms)以上50ms程度であり、短時間に処理が実施できる。以下では、送信波350が音波であり反射波360が音波である場合として説明する。
【0014】
送信波350の周波数は、例えば、約40kHzである。また、送信波350の周波数は、例えば、約20kHzである。送信波350の周波数は、人の可聴範囲以外の周波数である。
【0015】
送信波350の指向性は比較的高く設定される。例えば、送受信器310と頭部105との間の距離は、0.6メートル(m)〜0.8mに設定される。送受信器310と頭部105との間の距離は、例えば約0.7mである。頭部105の位置における送信波350の幅は、例えば0.1m以上0.3m以下程度である。0.15m以上0.25m以下であることがさらに望ましい。これにより、目的とする頭部105に的確に送信波350をあてることができる。
【0016】
例えば、送受信器310から送信した送信波350が、頭部105で反射され、その反射波360が送受信器310で受信されるまでの時間を計測することで、送受信器310と頭部105との間の距離が検出できる。
【0017】
図2(a)に例示した車載用頭部位置検出装置50においては、1つの送受信器310が、送信器の機能と、受信器の機能と、を有している。すなわち、送信器の機能と受信器の機能とが一体化されている。なお、図2(a)においては、4つの送受信器310が描かれているが、送受信器310の数は任意である。
【0018】
図2(b)に表したように、本実施形態に係る別の車載用頭部位置検出装置51においても複数の送受信器310が設けられている。ただし、この例では、送受信器310のそれぞれにおいて送信器の機能と、受信器の機能と、が分離されている。
【0019】
具体的には、複数の送受信器310のそれぞれは、送信部311と受信部312とを含む。すなわち、車載用頭部位置検出装置51においては、複数の送信部311と複数の受信部312とが設けられる。複数の送信部311は、頭部105に対向する互いに異なる位置に設けられる。複数の送信部311は、頭部105に向けて音波及び電磁波の少なくともいずれかの波(送信波350)を送信する。複数の受信部312は、頭部105に対向する互いに異なる位置に設けられる。複数の受信部312は、送信部311により送信された、音波及び電磁波の少なくともいずれかの波(送信波350)が頭部105によって反射されて得られる波(反射波360)を受信する。例えば、複数の送信部311及び複数の受信部312は、頭部105に面している。例えば、これらと頭部105との間に遮蔽物が入らないように、これらは設置される。ただし、送受信への悪影響が実質的に無ければ良い。
【0020】
送信部311が設けられる位置は、受信部312が設けられる位置と必ずしも同じでなくても良い。例えば、送信部311が設けられる位置は、受信部312が設けられる位置とは異なる。1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことができる。
【0021】
図2(c)に表したように、本実施形態に係る別の車載用頭部位置検出装置52においても複数の送受信器310が設けられている。そして、複数の送受信器310のそれぞれは、送信部311と受信部312とを含む。この場合も、1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことができる。
【0022】
図2(c)に示した例では、送信部311の数よりも受信部312の数の方が多い。すなわち、送信部311の数が4であり、受信部312の数が6である。この場合には、例えば、4つの送受信器310と、2つの受信部312が設けられていると見なすことができる。なお、本実施形態において、受信部312の数よりも送信部311の数の方が多くても良い。
【0023】
このように、送信部311と受信部312とが異なる位置に設けられている場合も、1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことにする。
【0024】
複数の送受信器310のそれぞれの角度は、送受信器310の指向性に合わせて、送信する波がオーバーラップするように設置される。ただし、送信する波は、過度にオーバーラップしない。送信部311と受信部312とが設けられる場合には、例えば、1つの組となる送信部311及び受信部312において、送信部311の送信の方向は、受信部312の受信の方向と実質的に同じとされることが望ましい。
【0025】
以下では、説明を簡単にするために、送信部311の機能と受信部312の機能とが一体化されている車載用頭部位置検出装置50に関して説明する。
【0026】
実施形態において、搭乗者100aは、車両の運転者である。複数の送受信器310は、例えば搭乗者の頭部105の前方の左右方向に沿って配置される。送受信器310は、例えば、運転席の前方のダッシュボードなどに設けられる。送受信器310は、例えば、車両のフロントガラス上部の屋根部などに設けられる。ただし、実施形態において、送受信器310の設置場所は任意である。
【0027】
ここで、車両の後部から車両の前部に向かう方向をZ軸方向とする。車両の左右方向をX軸方向とする。車両の上下方向をY軸方向とする。
【0028】
例えば、複数の送受信器310の少なくとも2つの、車両の左右方向(X軸方向)に沿う位置は、互いに異なる。例えば、複数の送受信器310のX軸方向に沿う位置のそれぞれは、互いに異なる。これにより、頭部105の左右方向に沿った位置が検出される。
【0029】
例えば、複数の送受信器310の少なくとも2つの、車両の前後方向(Z軸方向)に沿う位置は、互いに異なる。例えば、複数の送受信器310のX軸方向に沿う位置のそれぞれは、互いに異なる。これにより、頭部105の前後方向に沿った位置が検出される。
【0030】
例えば、複数の送受信器310のそれぞれのX軸方向及びZ軸方向における位置が違いに異なる。例えば、複数の送受信器310は、頭部105をX−Z平面において囲む環の少なくとも一部に沿って配置される。
【0031】
さらに、複数の送受信器310の少なくとも2つの、車両の上下方向(Y軸方向)に沿う位置が、互いに異なっても良い。これにより、頭部105の上下方向に沿った位置が検出される。
【0032】
以下、車載用頭部位置検出装置50を例として、送受信制御部320の動作の例について、説明する。なお、送受信器310のそれぞれが送信部311と受信部312とを含む場合は、送受信器310の動作に関する記述において、送信機能に関する動作は送信部311で実施され、受信機能に関する動作は受信部312で実施されるものとすることができる。
【0033】
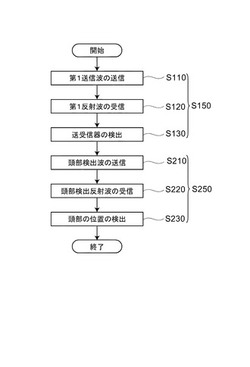
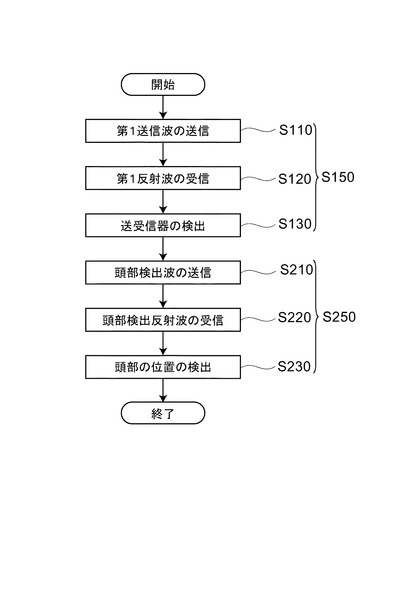
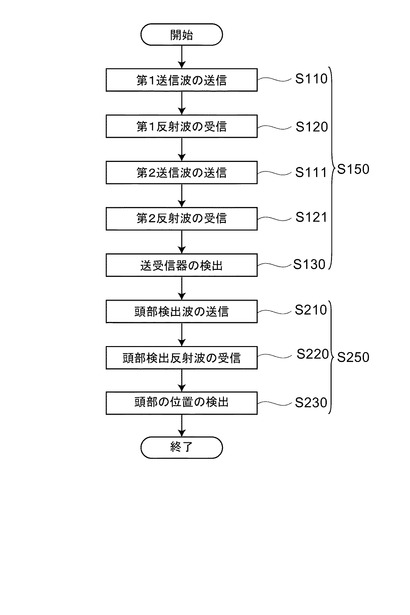
図1に表したように、送受信制御部320は、第1動作(ステップS150)と、第2動作(ステップS250)と、を実施する。
【0034】
第1動作は、第1送信動作(ステップS110)と、第1受信動作(ステップS120)と、送受信器検出動作(ステップS130)と、を含む。
【0035】
第1送信動作(ステップS110)では、送受信制御部320は、複数の送受信器310のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0036】
第1受信動作(ステップS120)では、送受信制御部320は、第1送信波が頭部105によって反射されて得られる第1反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0037】
送受信器検出動作(ステップS130)では、送受信制御部320は、入手した第1反射波を受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器310を検出する。
【0038】
第2動作は、頭部検出波送信動作(ステップS210)と、頭部検出反射波受信動作(ステップS220)と、頭部位置検出動作(ステップS230)と、を含む。
【0039】
頭部検出波送信動作(ステップS210)では、送受信制御部320は、検出された頭部105に最も近い送受信器310に、音波及び電磁波の少なくともいずれかの頭部検出波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0040】
頭部検出反射波受信動作(ステップS220)では、送受信制御部320は、頭部検出波が頭部105によって反射されて得られる頭部検出反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0041】
頭部位置検出動作(ステップS230)では、送受信制御部320は、入手した頭部検出反射波を受信した結果に基づいて頭部105の位置を検出する。
【0042】
このように、本実施形態に係る車載用頭部位置検出装置50においては、第1動作により、頭部105に最も近い送受信器310を検出する。そして、第2動作において、その送受信器310から送信された送信波350(頭部検出波)の反射波360(頭部検出反射波)を検出することで、頭部105の位置を検出する。すなわち、第2動作の頭部105の位置の検出の際に、頭部105に最も近い送受信器310による送信が用いられる。これにより、頭部の位置を正確に検出できる。
【0043】
以下、本実施形態における動作の具体例について説明する。
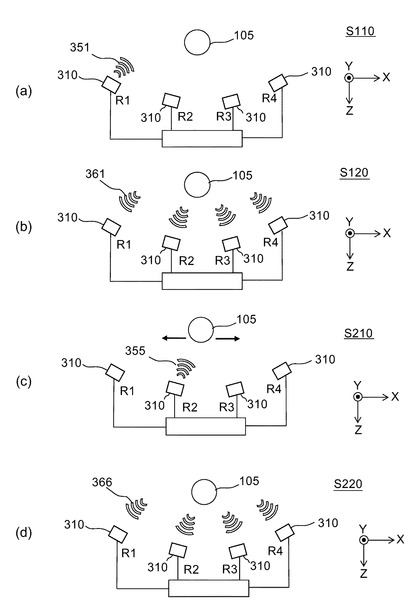
図3(a)〜図3(d)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
図3(a)、図3(b)、図3(c)及び図3(d)は、それぞれ、ステップS110、S120、S210及びS220の動作を例示している。
図3(a)に例示したように、この具体例では、送受信器310が4つ設けられている。すなわち、複数の送受信器310は、第1〜第4送受信器R1〜R4(第1〜第4送信部及び第1〜第4受信部と見なすことができる)を含む。
【0044】
図3(a)に表したように、ステップS110(第1送信動作)では、送受信制御部320は、複数の送受信器310のいずれかである例えば送受信器R1に、第1送信波351(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、第1送信波351の送信は、第2〜第4送受信器R2〜R4に実施させても良い。
【0045】
図3(b)に表したように、ステップS120(第1受信動作)では、送受信制御部320は、第1送信波351が頭部105によって反射されて得られる第1反射波362(反射波360のうちの1つ)を第1〜第4送受信器R1〜R4で受信した結果を入手する。
【0046】
そして、ステップS130(送受信器検出動作)では、送受信制御部320は、入手した第1反射波361を受信した結果に基づいて、第1〜第4送受信器R1〜R4のうちで頭部105に最も近い送受信器を検出する。この例では、第1〜第4送受信器R1〜R4のうちで頭部105に最も近い送受信器は、第2送受信器R2であるとする。なお、複数の送受信器310のうちの1つ(例えば第2送受信器R2)と頭部105との距離が、別の1つ(例えば第3送受信器R3)と頭部105との距離と等しい場合には、そのいずれかを最も近い送受信器と見なす。
【0047】
図3(c)に表したように、ステップS210(頭部検出波送信動作)では、送受信制御部320は、第2送受信器R2(頭部105に最も近い送受信器)に、頭部検出波355(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、頭部検出波355の周波数及び大きさなどの波の特性は、第1送信波351と同じでも良く、異なっていても良い。頭部検出波355の周波数及び大きさなどの波の特性を第1送信波351と同じにすることで、例えば、送受信器310の設計及び製造が簡略化される。
【0048】
図3(d)に表したように、ステップS220(頭部検出反射波受信動作)では、送受信制御部320は、頭部検出波355が頭部105によって反射されて得られる頭部検出反射波366(反射波360のうちの1つ)を第1〜第4送受信器R1〜R4で受信した結果を入手する。
【0049】
そして、ステップS230(頭部位置検出動作)では、送受信制御部320は、入手した頭部検出反射波366を受信した結果に基づいて頭部105の位置を検出する。
【0050】
以下、ステップS230(頭部位置検出動作)の例について説明する。
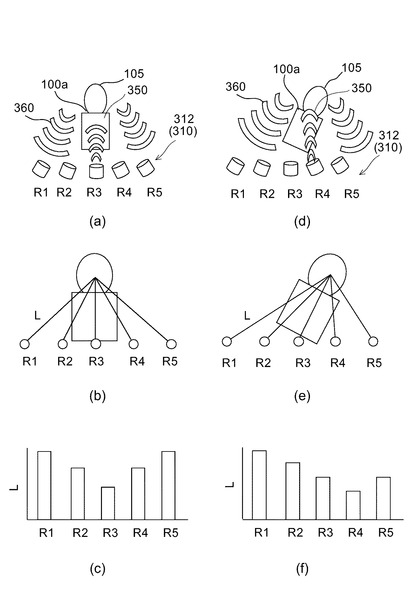
図4(a)〜図4(f)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
これらの図は、ステップS230の動作を例示している。この例では、複数の送受信器310は、第1〜第5送受信器R1〜R5(第1〜第5送信部及び第1〜第5受信部と見なすことができる)を含む場合が示されている。
【0051】
図4(a)〜図4(c)は、頭部105が第1の位置にある場合の動作を例示している。図4(d)〜図4(f)は、頭部105が第2の位置にある場合の動作を例示している。図4(a)及び図4(d)は、第1〜第5送受信器R1〜R5の位置と頭部105の位置との関係を示している。図4(b)及び図4(e)は、第1〜第5送受信器R1〜R5のそれぞれと頭部105との間の距離Lを示している。図4(c)及び図4(f)は、第1〜第5送受信器R1〜R5で検出される距離Lを示している。距離Lは、例えば、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間に基づいて求められる。
【0052】
図4(a)に表したように、第1〜第5送受信器R1〜R5は左右方向に沿ってほぼ等間隔で配置されている。そして、頭部105が第1の位置にある。この例では、第1の位置は、第3送受信器R3のほぼ正面である。
【0053】
図4(b)に表したように、第1〜第5送受信器R1〜R5のそれぞれと頭部105とを結ぶ線分の長さが距離Lである。
【0054】
頭部105で反射した頭部検出反射波366が第1〜第5送受信器R1〜R5のそれぞれに到達する時間は、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lに依存する。このため、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間を計測することで、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lを検出できる。
【0055】
図4(c)に表したように、第3送受信器R3と頭部105との距離Lが、他の送受信器と頭部105との距離Lよりも短い。
【0056】
図4(d)に表したように、頭部105が第2の位置にある。この例では、第2の位置は、第4送受信器R4のほぼ正面である。
【0057】
図4(e)に表したように、第2の位置における距離Lは、第1の位置における距離Lから変化する。
【0058】
図4(f)に表したように、この例では、第4送受信器R4で検出される距離Lが、一番短い。距離Lは、頭部105の位置と、第1〜第5送受信器R1〜R5のそれぞれの位置と、の相対関係によって変化する。
【0059】
このように、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間を計測することで、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lを検出し、これに基づいて、頭部105の位置を検出できる。
【0060】
例えば、N個の送受信器310が設けられる場合において、送受信器310のそれぞれと頭部105との距離Lの長さの線分を導入する。この線分の一端の位置は、送受信器310のそれぞれの位置に固定される。複数の線分の他方の位置が互いに重なる位置が、頭部105の位置となる。
【0061】
本実施形態に係る車載用頭部位置検出装置50においては、第2動作(ステップS210、220及び230)により、頭部105の位置を検出する。
このとき、第1動作(ステップS110、120及び130)により、頭部105に最も近い送受信器310を検出する。そして、第2動作において、その送受信器310から送信された送信波350(頭部検出波)の反射波360(頭部検出反射波)を検出することで、頭部105の位置を検出する。すなわち、第2動作の頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波が用いられる。これにより、頭部105の位置を正確に検出できる。
【0062】
例えば、複数の送受信器310が設けられる場合において、頭部105から遠い送受信器310を用いて、ステップS210(頭部検出波送信動作)を実施した場合は、車両内の屋根や後部座席などの、検出の目的ではない物体による反射の影響が大きくなる。このため、頭部105の位置の検出精度が低い場合がある。
【0063】
これに対し、実施形態においては、ステップS210(頭部検出波送信動作)が、頭部105に最も近い送受信器310により実施されるため、検出の目的ではない物体による反射の影響が小さくできる。すなわち、反射波360における時間的な外乱が抑制される。これにより、頭部105の位置の検出精度が高い。
【0064】
なお、頭部の位置(特に目の位置)を検出する方法として、カメラで頭部(顔)を撮像し、この像に画像処理を施し、顔や目などの位置を検出する参考例が考えられる。しかし、カメラで撮像して得られる像は、光(例えば外光)の影響を大きく受ける。このため、ロバストな画像処理が困難であり、位置の検出精度が低い場合がある。さらに、この方法においては、画像処理のために高性能な処理回路が必要であり、また、高価なカメラを用いる。このため、この方法を用いるとコストが大きく上昇する。さらに、位置の検出範囲を広げるためにカメラの撮像範囲を広げると、位置の検出精度が低下する。逆に、位置の検出精度を上げようとして撮像範囲を狭めると、例えば、検出可能な範囲が狭まる。
【0065】
これに対し、実施形態においては、検出信号(反射波)が外光などからの影響を受け難いため、外光などの外乱に対してロバストである。また、波の送信及び受信の単純な機能を有する送受信器310を用いるため、画像処理などの複雑な処理を必要としない。このため、処理回路のコストは低い。また、複数の複数の送受信器310を異なる位置に配置し、この配置の位置の範囲を広くすることで、位置の検出範囲は広い。そして、頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波を用いることで、位置の検出範囲は広く維持しつつ、検出精度は高い。例えば、左右の広い範囲において高い精度で位置が検出できる。これにより、運転者の動きを正確に逐次検出できる。
【0066】
なお、ソナーやレーダなどのように、波を送信し、その反射波を受信することで、周囲の物体を認識する構成がある。そして、複数の送信器と複数の受信器とを用いる構成も考えられる。この構成においては、周囲にある不特定の物体の存在を検出することが目的である。このため、複数の送信器のうちの特定の送信器が、検出の目的とする特定の物体との関係で選択されることがないと考えられる。
【0067】
これに対し、実施形態においては、検出の目的とする特定の物体は、車両に搭乗する搭乗者100aの頭部105である。このため、頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波を用いることで、頭部105の位置を高精度に検出できる。
【0068】
また、車両用表示装置として、運転者の頭部位置を検出する位置検出装置で検出された運転者の頭部位置の変化から運転者の目の位置を求め、表示情報の表示位置を、求められた目の位置に応じた位置になるように制御する参考例がある。この参考例において、位置検出装置として、赤外線センサまたは超音波センサを用い、複数のセンサを縦方向及び横方向に設置する構成がある。しかし、この場合は、複数のセンサが用いられるものの、赤外線または超音波を発生させる複数の波発生部のうちで、検出の目的とする物体(頭部)に最も近い波発生部を特定して、これを用いることがない。このため、この参考例においても、検出の精度は低い。
これに対し、実施形態においては、頭部105に最も近い送受信器310から送信された波を用いることで、頭部105の位置を高精度に検出できる。
【0069】
以下、実施形態に係る車載用頭部位置検出装置の動作の具体例についてさらに説明する。
【0070】
図5(a)及び図5(b)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
すなわち、これらの図は、車載用頭部位置検出装置50における制御のタイミングチャートである。図5(a)は、送受信制御部320から送受信器310に供給される送信制御信号SCSを例示している。図5(b)は、複数の送受信器310によって受信した反射波360の結果を入手するための受信制御信号RCSを例示している。
【0071】
なお、本実施形態において、送受信器310が、送信部311と受信部312とを含む場合は、送信制御信号SCSにより、送信部311の送信動作が制御される。例えば、受信部312が常に反射波360を受信しているときは、受信制御信号RCSにより、反射波360の受信結果を送受信制御部320が入手するタイミングが制御される。また、例えば、受信部312が、特定の信号が入力されたときに反射波360を受信する場合は、受信制御信号RCSにより、受信部312が反射波360を受信するタイミングが制御される。
【0072】
また、本実施形態において、送受信器310において送信機能と受信機能とが分離されてない場合は、送信制御信号SCSにより、送受信器310の送信が制御される。そして、受信制御信号RCSにより、送受信器310が反射波360を受信するタイミングが制御され、その結果を送受信制御部320が入手するタイミングが制御される。
【0073】
図5(a)に表したように、送信制御信号SCSにおいては、第1時刻t1から第2時刻t2までの期間において、ハイ状態HSである。この第1時刻t1から第2時刻t2までの期間において、複数の送受信器310のいずれか(例えば第1送受信器R1)から、送信波350(例えば第1送信波351)が送信される。
【0074】
本実施形態においては、時刻t2から一定の期間が経過するまでの反射波360の受信結果は入手されない。または、受信結果を入手しても、その受信結果は使用されない。
例えば、図5(b)に表した第1時刻t1から第3時刻t3までの期間は、送信波350が目的とする頭部105で反射した反射波360が送受信器310に届く期間ではない。例えば、第1時刻t1から第3時刻t3までの期間においては、例えば特定の送受信器310から別の送受信器310に波が直接届く。また、この期間においては、頭部105で反射した波ではなく、車両の操舵装置などで反射した波が送受信器310に届く。すなわち、この期間において受信した波は、目的とする反射波360、すなわち、頭部105で反射した波ではない。
【0075】
第1時刻t1から第3時刻t3まで、受信制御信号RCSはロウ状態LSとされる。これにより、この期間において受信した波は、検出の対象から除外される。
【0076】
そして、第3時刻t3から第4時刻t4の間に期間おいて、受信制御信号RCSは、ハイ状態HSとなる。この期間において、反射波360の受信結果が送受信制御部320により入手される。また、この期間において入手された受信結果が使用される。
【0077】
例えば、第3時刻t3から第4時刻t4までの期間のなかで、複数の送受信器310における反射波360の受信の時刻が異なる。これにより、複数の送受信器310のそれぞれと頭部105との間の距離Lが検出される。
【0078】
そして、第4時刻t4よりも後においては、受信制御信号RCSはロウ状態となる。これにより、第4時刻t4以降の時刻に届く2次反射波などが除外される。
【0079】
例えば、送受信器310と頭部105との間の距離が約0.7mである場合、第1時刻t1から第3時刻t3までの期間(第1動作期間td1)は、例えば、約5msである。すなわち、約5ms以前に届く波は、目的とする反射波ではないため、除外される。
【0080】
送受信器310と頭部105との間の距離が約0.7mである場合、第3時刻t3から第5時刻t5までの期間(第2動作期間td2)は、例えば、約4msである。
【0081】
例えば、第1時刻t1から第3時刻t3までの期間が、第1送信動作の期間に相当し、第3時刻t3から第5時刻t5までの期間が、第1受信動作の期間に相当する。
【0082】
または、例えば、第1時刻t1から第3時刻t3までの期間が、頭部検出波送信動作の期間に相当し、第3時刻t3から第5時刻t5までの期間が、頭部検出反射波受信動作の期間に相当する。
【0083】
このように、本実施形態において、送受信制御部320は、第1送信波351の送信(例えば第2時刻t2)の後に、予め定められた第1期間(第2時刻t2から第3時刻t3までの期間が経過した後に、第1受信動作を実施する(開始する)。そして、送受信制御部320は、頭部検出波355の送信(例えば第2時刻t2)の後に予め定められた第2期間(第2時刻t2から第3時刻t3までの期間)が経過した後に、頭部検出反射波受信動作を実施する(開始する)。
【0084】
これにより、目的とする反射波360以外の波を除いて、目的とする反射波360を受信(受信結果を入手)できる。これにより、検出の精度が向上できる。
【0085】
また、本実施形態において、送受信制御部320は、第1受信動作が開始して(第3時刻t3)から予め定められた第3期間(第3時刻t3から第4時刻t4までの期間)が経過したら、第1受信動作を終了する。そして、送受信制御部320は、頭部検出反射波受信動作が開始して(第3時刻t3)から予め定められた第4期間(第3時刻t3から第4時刻t4までの期間)が経過したら、頭部検出反射波受信動作を終了する。
【0086】
これにより、第4時刻t4以降の時刻に届く2次反射波などが除外され、目的とする反射波360を受信(受信結果を入手)できる。これにより、検出の精度が向上できる。
【0087】
さらに、送受信制御部320は、頭部検出反射波受信動作を終了した後(第4時刻t4の後)に、予め定められた期間(第4時刻t4から第5時刻t5までの期間)が経過してから、次の送信動作を実施する。すなわち、この期間の2次反射波などが送受信器310に到達し終わり、ノイズが無くなった状態で、次の送信動作(例えば第1送信動作または頭部検出波送信動作)を実施する。このように、目的とする反射波を受信してから、所定の期間が経過した後に次の送信動作を実施することで、ノイズを抑制でき、検出精度が高まる。
【0088】
図6は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図6に表したように、この動作においては、第1動作(ステップS150)は、第2送信動作(ステップS111)と、第2受信動作(ステップS121)と、をさらに含む。
【0089】
第2送信動作(ステップS111)においては、送受信制御部320は、第1受信動作(ステップS120)の後に、複数の送受信器310の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0090】
第2受信動作(ステップS121)においては、送受信制御部320は、第2送信波が頭部105によって反射されて得られる第2反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0091】
そして、送受信器検出動作(ステップS130)は、上記で入手した第2反射波を受信した結果にさらに基づいて実施される。
【0092】
このように、この例では、ステップS120とステップS130との間に、ステップS111及びステップS121が実施される。
【0093】
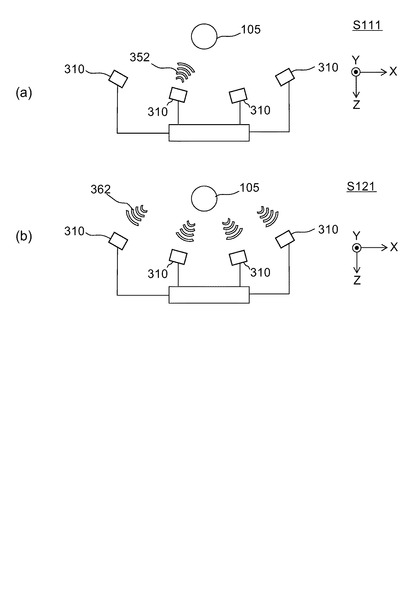
図7(a)及び図7(b)は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示する模式図である。
図7(a)及び図7(b)は、それぞれ、ステップS111及びステップS121の動作を例示している。
この具体例では、複数の送受信器310は、第1〜第4送受信器R1〜R4(第1〜第4送信部及び第1〜第4受信部と見なすことができる)を含む。図3(b)に例示したステップS120の後に、図7(a)及び図7(b)に例示するステップS111及びステップS121が実施される。
【0094】
図7(a)に表したように、ステップS111においては、送受信制御部320は、例えば第2送受信器R2(複数の送受信器310の別のいずれか)に、第2送信波352(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、第2送信波352の送信は、例えば、第3送受信器R3または第4送受信器R4により実施されても良い。
【0095】
図7(b)に表したように、ステップS121においては、送受信制御部320は、第2送信波352が頭部105によって反射されて得られる第2反射波362(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0096】
そして、送受信器検出動作(ステップS130)は、上記で入手した第2反射波362を受信した結果にさらに基づいて実施される。すなわち、送受信検出動作においては、第1反射波361を受信した結果に加え、第2反射波362を受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。これにより、複数の送受信器310のうちで頭部105に最も近い送受信器をさらに高い精度で検出できる。これによりさらに高い精度で頭部105の位置を検出できる。
【0097】
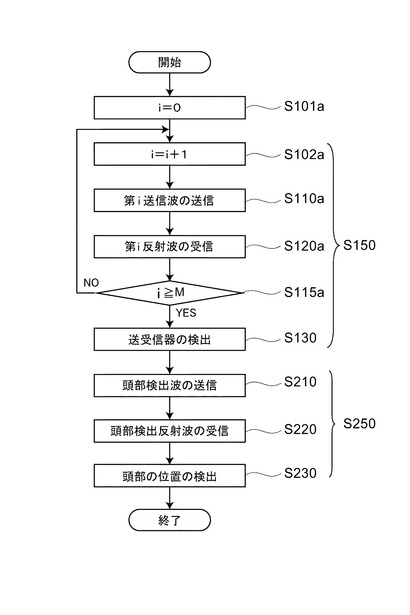
図8は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
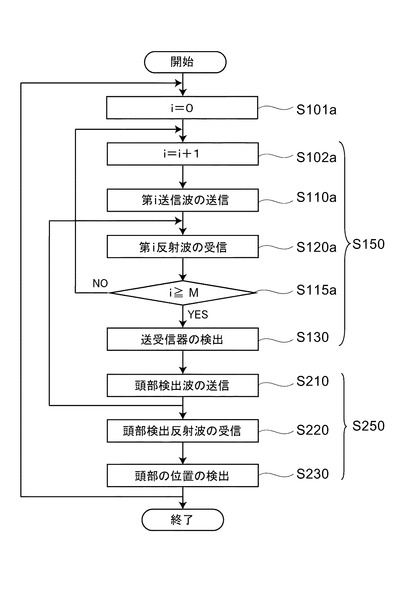
この例では、N(Nは1以上の整数)個の送受信器310が設けられる。そして、M個(Mは、1以上でN以下の整数)の送受信器310において、送信波350の送信が行われる。
【0098】
例えば、図8に表したように、整数iが設定され、iが0に設定される(ステップS101a)。そして、iに1が加えたものが新しいiとされる(ステップS102a)。
【0099】
送受信制御部320は、第i送受信器(複数の送受信器310の別のいずれか)に、第i送信波(送信波350のうちの1つ)を頭部105に向けて送信させる(ステップS110a)。
【0100】
送受信制御部320は、第i送信波が頭部105によって反射されて得られる第i反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0101】
そして、iとMが比較される(ステップS115a)。iがM未満の場合は、ステップS102aに戻る。そして、ステップS110a及びステップS120aが実施される。
【0102】
これにより、M個の送受信器310を用いて、ステップS110a及びステップS120aが実施される。MがNと等しいときは、N個の送受信器310の全てを用いて、ステップS110a及びステップS120aが実施される。すなわち、送受信器310の全てにより送信波350を順次送信し、順次送信された送信波350によって反射されて得られる反射波360を複数の送受信器310で順次受信した結果が順次入手される。この結果は、例えば、適宜、情報格納部に格納される。
【0103】
iがM以上の場合に、ステップS130が実施される。
ステップS130においては、M個の送受信器310を用いた送信波350による反射波360を複数の送受信器310で順次受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。MがNと等しいときは、N個の送受信器310の全てを用いた結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。これにより、より高い精度で、頭部105に最も近い送受信器を検出できる。
【0104】
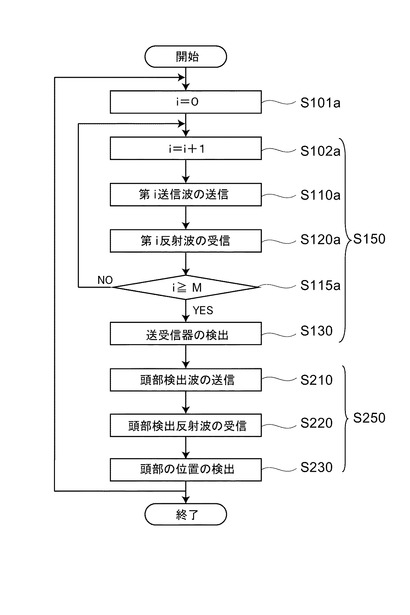
図9は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図9に表したように、この例では、送受信制御部320は、第1動作(ステップS150)と第2動作(ステップS250)とを繰り返し実施する。これにより、頭部105の位置を継続的に検出することができる。すなわち、頭部105の位置の時間変化が検出できる。
【0105】
なお、このとき、第1動作は、N個の送受信器310の全てを用いて実施されても良く、N個の一部のM個の送受信器310を用いて実施されても良い。ここでMは、1でも良い。
【0106】
図10は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図10に表したように、この例でも、送受信制御部320は、第1動作と第2動作とを繰り返し実施する。
【0107】
そして、ステップS210において送信された頭部検出波355によってステップS220が実施されるのに加えて、ステップS210において送信された頭部検出波355によってステップS120aが実施される。すなわち、ステップS210において、検出された頭部105に最も近い送受信器310から頭部検出波355が頭部105に向けて送信される。この頭部検出波355の反射波(頭部検出反射波366)を検出する(ステップS120a)ことで、頭部105に最も近い送受信器310を検出する(ステップS130)。
【0108】
このように、この例では、第1受信動作(ステップS110a)においては、送受信制御部320は、過去に実施された頭部検出波送信動作(ステップS210)の頭部検出波355が頭部105によって反射されて得られる反射波(頭部検出反射波366)を複数の送受信器310で受信した結果を第1反射波361として入手する。
【0109】
すなわち、第1動作と第2動作とを繰り返して実施する場合に、ステップS110aにおける送信波350の送信が、頭部105に最も近い送受信器310により行われることに相当する。これにより、ステップS130における最も頭部105に近い送受信器310の検出の精度がより高まる。また、第1動作及び第2動作の組みの実施の時間が短縮できる。これにより、頭部105の速い動きにも追従して頭部105の位置を検出できる。
【0110】
すなわち、第1動作と第2動作とは繰り返して実施され、第1送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310とされる。
【0111】
さらに、第i送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310としても良い。
【0112】
さらに、例えば、第i送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310の隣の送受信器310としても良い。
【0113】
すなわち、第1動作は、第2送信動作と、第2受信動作と、をさらに含む。第2送信動作においては、送受信制御部320は、第1受信動作の後に、複数の送受信器310の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波352を頭部105に向けて送信させる。第2受信動作においては、送受信制御部320は、第2送信波352が頭部105によって反射されて得られる第2反射波362を複数の送受信器310で受信した結果を入手する。そして、送受信器検出動作は、入手した第2反射波362を受信した結果にさらに基づいて実施される。そして、送受信制御部320は、第1動作と第2動作とを繰り返し実施する。第2送信動作における複数の送受信器310の別のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310の隣の送受信器310とすることができる。
【0114】
これにより、最も頭部105に近い送受信器310の検出の精度がより高まる。また、頭部105の速い動きにも追従して頭部105の位置を検出できる。
【0115】
図11(a)〜図11(d)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
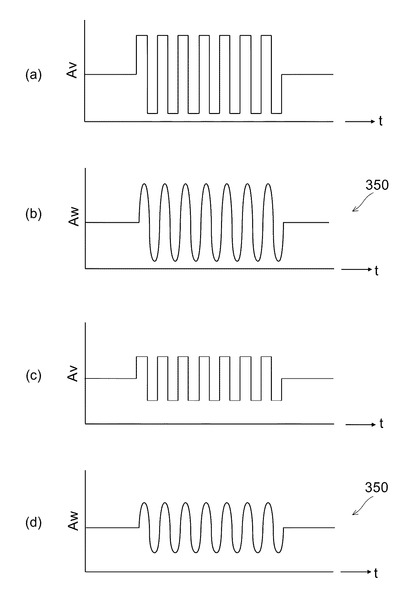
図11(a)及び図11(b)は、送信波350の強度(振幅)が大きい場合を例示している。図11(c)及び図11(d)は、送信波350の強度(振幅)が小さい場合を例示している。図11(a)及び図11(c)は、送受信器310において送信波350を出力する際の駆動電圧Avを模式的に例示している。図11(b)及び図11(d)は、送受信器310から出力される送信波350の強度Aw(振幅)を模式的に例示している。これらの図の横軸は時間tである。
【0116】
図11(a)及び図11(c)に表したように、送受信器310(例えば送信部311)は、駆動電圧Avが大きい場合と小さい場合とを有することができる。駆動電圧Avが大きい場合には、駆動電圧Avのピークツーピークの電圧は、例えば10V(ボルト)である。駆動電圧Avが小さい場合には、駆動電圧Avのピークツーピークの電圧は、例えば5Vである。このように、駆動電圧Avは可変である。
【0117】
このように、駆動電圧Avを変更することで、図11(b)及び図11(d)に表したように、送信波350の強度Awは変更可能である。
【0118】
送受信器310における駆動電圧Avの変更は、例えば、送受信制御部320によって制御される。
【0119】
なお、図11(a)及び図11(c)に例示した駆動電圧Avは、例えば40kHzまたは20kHzの周波数を有する。このとき、図11(b)及び図11(d)に例示した送信波350は、40kHzまたは20kHzの周波数を有する。
【0120】
送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することができる。
【0121】
具体的には、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離であるときには、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを第1強度とする。送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離よりも長い第2距離のときには、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを第1強度よりも強い第2強度にする。
【0122】
例えば、車両内のシートの前後位置により、頭部105と送受信器310との距離が変化する。このとき、送受信器310と頭部105との間の距離に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することで、例えば、適切な感度での検出ができる。
【0123】
複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、任意の方法により入手できる。
【0124】
例えば、送受信制御部320は、車両に設けられ搭乗者100aが座るシートの位置に関する情報を入手することができる。この情報の入手には、車両に設けられるCAN(Controller Area Network)を利用することができる。そして、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、入手したシートの位置に関する情報に基づいて求められることができる。
【0125】
さらに、送受信制御部320は、第1動作と第2動作とを実施し、頭部105の位置を検出することで、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報を得ることができる。すなわち、送受信制御部320は、第1動作と第2動作とを複数回実施する。複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、過去に実施された第2動作によって検出された頭部105の位置に関する情報に基づいて求められる。
【0126】
このようにして求められた送受信器310と頭部105との間の距離に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することで、例えば、適切な感度での検出ができる。
【0127】
さらに、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報に基づいて、第1送信動作及び第1受信動作の時間に関する条件、及び、頭部検出波送信動作及び頭部検出反射波受信動作の時間に関する条件の少なくともいずれかを変更できる。
【0128】
例えば、送受信制御部320は、送受信器310と頭部105との間の距離に関する情報に基づいて、第1送信動作と第1受信動作との間の時間(例えば第2時刻t2から第3時刻t3までの時間)、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間(例えば第2時刻t2から第3時刻t3までの時間)の少なくともいずれかを変更することができる。
【0129】
例えば、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離であるときには、第1送信動作と第1受信動作との間の時間、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間の少なくともいずれかを第1時間とする。そして、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離よりも長い第2距離のときには、第1送信動作と第1受信動作との間の時間、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間の少なくともいずれかを第1時間よりも長い第2時間にする。
【0130】
これにより、目的としていない反射波を効率良く除外し、頭部105で反射した反射波360を的確に受信できる。これにより、位置の検出の精度がさらに向上する。
【0131】
この場合も、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、任意の方法により入手できる。例えば、送受信制御部320は、車両に設けられ搭乗者100aが座るシートの位置に関する情報を入手し、これに基づいて、複数の送受信器310と頭部105との間の距離に関する情報を求めることができる。さらに、送受信制御部320は、第1動作と第2動作とを繰り返し実施し、頭部105の位置を検出することで、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報を得ることができる。
【0132】
このように、本実施形態に係る車載用頭部位置検出装置は、複数の送受信器310(送信部311及び受信部312)を用いる。送受信器310は、例えば、超音波を用いる。送受信器310(受信部312)は、例えば、超音波センサである。複数の超音波センサを利用して頭部105の位置を検出することで、例えば、処理コストの削減、ハードウェアの簡素化、及び、外光に依存しないロバストな検出が実現できる。
【0133】
例えば、N個の送受信器310を利用し、1つの送受信器310から送信された超音波の反射波をN個の送受信器310で受信する。次に、所定の時間の後に、別の送受信器310から送信された超音波の反射波をN個の送受信器310で受信する。これを順次、N個の送受信器310を用いて繰り返す。そして、この結果に基づいて、頭部105に最も近い送受信器310を検出する。これにより、外乱の影響が抑制された状態で、頭部105に最も近い送受信器310が検出できる。
【0134】
そして、検出された頭部105に最も近い送受信器310から送信された超音波の反射波を、N個の送受信器310で受信することで、頭部105の位置を検出する。これにより、外乱の影響が抑制された状態で、頭部105の位置を検出できる。
【0135】
さらに、検出された頭部105に最も近い送受信器310から送信された超音波の反射波を受信することで、頭部105に最も近い送受信器310を改めて検出する。上記を繰り返すことで、頭部105に近い送受信器310から送信された超音波を利用して、高い精度で頭部105の位置を検出することができる。
【0136】
例えば、第i送受信部から送信波が送信された時刻を基準にして、N個の送受信器310(受信部312)のそれぞれが反射波を受信した時刻が記憶される。これにより、N個の送受信器310(受信部312)のそれぞれと頭部105との間の距離が算出される。N個の送受信器310のうちで一番早く反射波を受信した送受信器310から超音波を出射し、N個の送受信器310で反射波を受信し、その結果に基づいて頭部105の位置を検出する。
【0137】
それ以降は、N個の送受信器310のうちで一番早く反射波を受信した送受信器310またはその付近の送受信器310(例えば隣の送受信器310など)から超音波を出射し、N個の送受信器310で反射波を受信し、頭部105の位置を検出する。さらに、そのときに頭部105に一番近い送受信器310を検出する。
【0138】
上記を繰り返す。これにより、例えば、搭乗者100aの姿勢が大きく変化しても、送信波が効率良く搭乗者100aにあたり、効率良く反射する。これにより、検出の精度が高まる。
【0139】
送信する超音波の強度(音圧)は、計測目標(頭部105)と超音波センサとの間の距離に適合する強度であることが望ましい。例えば、運転席のシートの位置に関する情報がCANにより取得され、この情報に基づいて、音圧を制御することが望ましい。例えば、電子式スライドシードなどによるシート位置メモリ機能などが利用できる。例えば、シートの位置と、搭乗者100a運転者)と超音波センサと間の距離と、に関する情報を利用できる。例えば、この情報は、表または変換関数により取得できる。
【0140】
また、複数の超音波センサのうちの1つ(例えば運転席の正面の超音波センサ)を使い、計測目標(頭部105)と超音波センサとの間の距離を求めても良い。この計測結果の情報に基づいて、音圧を制御することができる。これにより、目的としない物体で反射した反射波による折り返しノイズが軽減できる。
【0141】
(第2の実施形態)
図12は、本実施形態に係る車載用表示装置の構成を例示する模式図である。
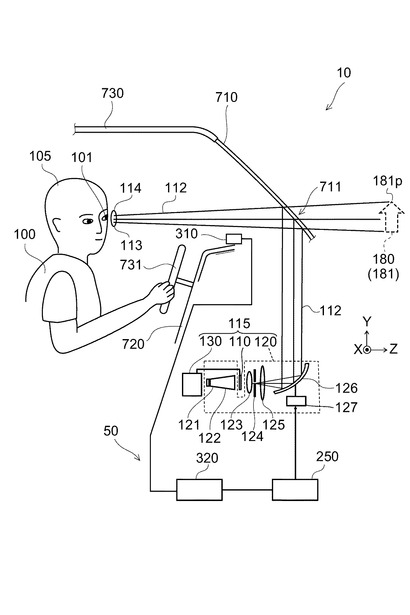
図12に表したように、本実施形態に係る車載用表示装置10は、車両730に搭載される。車両730は、例えば、四輪車、三輪車、トラック、バスなどの、人が搭乗して操縦できる任意の移動体を含む。
【0142】
車載用表示装置10は、車載用頭部位置検出装置50と、映像投影部115と、投影位置制御部250と、を備える。
【0143】
車載用表示装置10においては、実施形態に係る任意の車載用頭部位置検出装置及びその変形を用いることができる。以下では、車載用頭部位置検出装置50を用いる場合として説明する。
【0144】
映像投影部115は、頭部105に映像情報を含む光束112を投影する。
【0145】
投影位置制御部250は、車載用頭部位置検出装置50によって検出された頭部105の位置に基づいて、映像投影部115に含まれる光学部品の少なくともいずれかの位置、角度及び配置の少なくともいずれかを制御して、光束112の投影位置113を制御する。すなわち、検出された頭部105の位置に光束112が投影されるように、光束112の投影位置113を制御する。例えば、投影位置制御部250は、光束112の投影位置113を、頭部105の動きに追従させる。
【0146】
この例では、車載用表示装置10は、映像を含む光束112を反射部711に反射させて車両730に搭乗する観視者100に投影する。観視者100は、搭乗者100aである。観視者100は、例えば車両730の操舵装置731(ハンドル、ステアリングホイール)を操作する運転者である。
【0147】
反射部711には、例えばコンバイナが用いられる。
反射部711は、例えば、フロントガラス部710の少なくとも一部とすることができる。フロントガラス部710は、車両730のフロントガラスを含むことができる。反射部711は、例えば、車両730のフロントガラスの室内側に設けられる。
【0148】
反射部711は、例えば、フロントガラスの車両730の室内側の面に設けられる。また、反射部711は、フロントガラスよりも車両730の室内側に、フロントガラスから離間して設けられても良い。反射部711は、車載用表示装置10に含まれても良い。反射部711は、車載用表示装置10に含まれる筐体に格納可能でも良い。
【0149】
映像投影部115は、例えば、光束112を、車両730のフロントガラス部710に設けられる反射部711に反射させて、観視者100の頭部105に投影する。映像投影部115は、例えば、映像データ生成部130と、映像生成部110と、投影部120と、を含む。
【0150】
映像データ生成部130は、表示オブジェクト180を含む映像に対応する映像データを生成し、映像生成部110に供給する。
【0151】
表示オブジェクト180は、車載用表示装置10が観視者100に提示する映像に設けられるものである。表示オブジェクト180は、例えば、車載用表示装置10が搭載される車両730の運行情報に関する情報を含む。表示オブジェクト180は、車両730の速度、進行方向を示す「矢印」、及び、変速機の状態などの種々の内容を含むことができる。表示オブジェクト180は、車両730の経路案内に関する情報を含むことができる。
【0152】
映像生成部110には、例えば、液晶表示装置(LCD)などの光スイッチが用いられる。映像生成部110は、映像データ生成部130から供給された映像データに基づいて、映像生成部110の画面に映像を形成する。
【0153】
投影部120には、例えば、各種の光源、レンズ、ミラー、及び、発散角(拡散角)を制御する各種の光学素子が用いられる。
本具体例では、投影部120は、光源121と、テーパライトガイド122と、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、出射側ミラー126と、を含む。
【0154】
光源121は光束112となる光を生成する。光束112となる光の進行方向に沿って、光源121と出射側ミラー126との間にテーパライトガイド122が配置され、テーパライトガイド122と出射側ミラー126との間に光源側レンズ123が配置され、光源側レンズ123と出射側ミラー126との間にアパーチャ124が配置され、アパーチャ124と出射側ミラー126との間に出射側レンズ125が配置される。この構成により、投影部120は、光束112の発散角を制御することができる。
【0155】
本具体例では、テーパライトガイド122と光源側レンズ123との間に、映像生成部110(例えばLCD)が配置されている。
【0156】
光源121には、LED(Light Emitting Diode)や高圧水銀ランプ、ハロゲンランプ、レーザなど各種のものを用いることができる。光源121にLEDを用いることで、消費電力を低減でき、また装置を軽量化でき、小型化できる。
【0157】
映像データ生成部130、映像生成部110及び投影部120のそれぞれの構成は、種々の変形が可能である。映像生成部110に含まれる要素と、投影部120に含まれる要素と、の配置は任意であり、例えば、投影部120に含まれる要素どうしの間に、映像生成部110(及びそれに含まれる要素)が挿入されていても良い。
【0158】
例えば、光源121から出射された光は、テーパライトガイド122において発散角がある程度の範囲に制御される。そして、その光は、映像生成部110を経ることで、所定の表示オブジェクト180を含む映像を含む光束112となる。
【0159】
本具体例では、出射側ミラー126は、凹面状であり、これにより、光束112に含まれる映像情報の像が拡大されて観視者100に投影される。
【0160】
光束112は、出射側ミラー126で反射した後、反射部711で反射して、観視者100の目101に到る。
【0161】
観視者100は、反射部711を介して、像形成位置181pの位置に形成された表示オブジェクト180の像181(虚像)を知覚する。このように、車載用表示装置10は、HUDとして使用できる。
【0162】
出射側ミラー126は可動式とすることができる。例えば、観視者100の頭部105の位置や動きに合わせて、手動で、または、自動で、出射側ミラー126の位置や角度を調節し、光束112を目101に向けて適切に投影させることができる。
【0163】
映像投影部115は、駆動部127をさらに含む。駆動部127は、映像投影部115に含まれる光学素子の角度や位置などを変化させるモータなどを含む。本具体例では、駆動部127は、出射側ミラー126の角度や位置などを変える。実施形態はこれに限らず、駆動部127は映像投影部115に含まれる任意の光学素子の角度や位置などを変えることができる。駆動部127によって光学素子の角度や位置を変えることで、光束112の出射方向が変化する。これにより、例えば観視者100の位置における光束の投影位置113が制御される。
なお、映像投影部115は、上記の例の他に各種の変形が可能である。
【0164】
車載用表示装置10の映像投影部115は、例えば、車両730のダッシュボード720の内部に設けられることができる。
【0165】
一方、映像データ生成部130は、必ずしも映像投影部115と一体的に設けられなくても良い。映像データ生成部130は、例えば、ダッシュボード720の内部ではなく、車両730の任意の場所に設置しても良い。映像データ生成部130からの映像データは、電気信号や光信号などの有線または無線の方式により、映像投影部115(の映像生成部110)に供給される。
【0166】
車載用頭部位置検出装置50の複数の送受信器310(例えば送信部311及び受信部312)は、例えば、車両730のダッシュボード720の上やフロントガラス部710の上部の屋根部などに設けられる。ただし、実施形態において、送受信器310の設置場所は、技術的に可能な範囲で、任意である。
【0167】
送受信制御部320は、車両730内の任意の場所に設置される。送受信制御部320は、例えば、ダッシュボード720の内部などに設けられる。
【0168】
送受信制御部320は、投影位置制御部250と接続される。送受信制御部320は、投影位置制御部250と、電気信号や光信号などの有線または無線の方式により、接続される。
【0169】
車載用表示装置10において、光束112は、例えば、片方の目101で観視される。この場合には、両目で常時観視されないように、光束112の広がりが制御される。これにより、光束112は片方の目101に投影され、両目には投影されない。例えば、光束112は片方の目101だけに投影される。例えば、観視者100の位置における光束112の投影領域114の大きさは、片方の目101が入り、両目が入らない大きさに設定される。
【0170】
観視者100の両目(瞳)の間隔は、例えば、60ミリメートル(mm)〜75mmである。観視者100の位置における光束112の左右方向の幅(投影領域114の左右方向の幅)は、例えば75mm以下設定される。さらに、65mm以下に設定されても良く、さらに60mm以下に設定されても良い。この投影領域114の大きさは、例えば、主に投影部120に含まれる光学素子によって制御される。
【0171】
このように、映像投影部115は、光束112を観視者100の片目のみに投影するように光束112の発散を制御する発散角制御素子を含む。発散角制御素子は、例えば、アパーチャ124である。発散角制御素子は、例えば、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、の組である。
【0172】
反射部711(例えばフロントガラス部710)は、観視者100からの距離が21.7cm以上の位置に配置される。これにより、観視者100が映像を片方の目101で観視した場合において、知覚する奥行き感が増強され、また、表示オブジェクト180を所望の奥行き位置に知覚させ易くできる。
【0173】
なお、本実施形態において、光束112は観視者100の両目に投影され、観視者100は両目で表示オブジェクト180を観視しても良い。
【0174】
投影位置制御部250は、映像投影部115を制御して、観視者100の位置における光束112の位置(投影位置113)を制御する。
【0175】
例えば、光束112が片方の目101で観視される場合には、光束112の断面形状(光束112の進行方向に対して垂直な平面で光束112を切断したときの断面形状)の左右方向の長さは、上下方向の長さよりも短い。これにより、片方の目101で観視でき、さらに、上下方向の観視範囲が広がる。
【0176】
投影位置制御部250は、車載用頭部位置検出装置50によって検出した頭部105の位置に基づいて、光束112の投影位置113を変更する際に、特に、光束112の投影位置の左右方向に沿った位置を変更する。これにより、頭部105の位置が変化して目101の位置が変化したときにも、片方の目101への光束112の投影を維持することができる。
【0177】
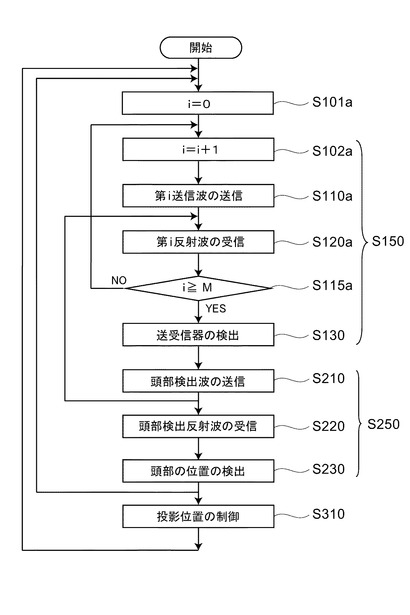
図13は、本実施形態に係る車載用表示装置の動作を例示するフローチャート図である。
図13に表したように、本実施形態に係る車載用表示装置10においては、車載用頭部位置検出装置50によって第1動作(ステップS150)及び第2動作(ステップS250)が実施されて頭部105の位置が検出され、その結果に基づいて、投影位置制御部250が、映像投影部115を制御して、光束112の投影位置113を制御する(ステップS310)。
【0178】
そして、ステップS150、ステップS250及びステップS310が繰り返し実施される。これにより、光束112の投影位置113は、頭部105の動きに追従して制御される。
【0179】
本実施形態に係る車載用表示装置10によれば、頭部の位置を正確に検出できるので、目101(特に片方の目101)の位置に映像を的確に表示できる。
【0180】
(第3の実施形態)
図14は、本実施形態に係る運転支援装置の構成を例示する模式図である。
図14に表したように、本実施形態に係る運転支援装置20は、車両730に搭載される。
【0181】
運転支援装置20は、車載用頭部位置検出装置50と、警報出力装置410と、を備える。
【0182】
運転支援装置20は、さらに、映像投影部115及び投影位置制御部250を備えても良い。これにより、第2実施形態に関して説明した表示がさらに実施できる。ただし、運転支援装置20において、映像投影部115及び投影位置制御部250は必要に応じて設けられ、省略しても良い。
【0183】
運転支援装置20においては、実施形態に係る任意の車載用頭部位置検出装置及びその変形を用いることができる。以下では、車載用頭部位置検出装置50を用いる場合として説明する。
【0184】
警報出力装置410は、車載用頭部位置検出装置50によって検出された頭部105の位置に基づいて、搭乗者100a(観視者100)の運転状態を推定する。警報出力装置410は、推定された運転状態に基づいて、音、光及び震動の少なくともいずれかを含む警報を出力する。
【0185】
警報出力装置410は、搭乗者100aの運転状態として、不注意運転などを推定する。例えば、不注意運転は居眠り運転などを含む。例えば、頭部105の位置の変化が少なくなったときに、搭乗者100aが居眠り運転していると推定される。また、頭部105の位置が急激に下方向に変化したり、周期的に下方向に変化することがあったときに、搭乗者100aが居眠り運転していると推定される。
【0186】
このように、推定された運転状態に基づいて、警報を出力することで、例えば居眠り運転を抑制できる。
【0187】
実施形態においては、実施形態に係る車載用頭部位置検出装置50により検出した頭部105の位置を用いることで、正確に頭部105の位置が把握できる。これにより、搭乗者100aの運転状態がより正確に把握できる。これにより、より効率的な運転支援が可能になる。
【0188】
実施形態によれば、頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置が提供される。
【0189】
以上、具体例を参照しつつ、本発明のいくつかの実施形態について説明した。しかし、本発明の実施形態は、これらの具体例に限定されるものではない。例えば、車両用頭部位置検出装置に含まれる送受信器、送信部、受信部及び送受信制御部、車載用表示装置に含まれる映像投影部及び投影位置制御部、並びに、運転支援装置に含まれる警報出力装置などの各要素の具体的な構成に関しては、当業者が公知の範囲から適宜選択することにより本発明を同様に実施し、同様の効果を得ることができる限り、本発明の範囲に包含される。
また、各具体例のいずれか2つ以上の要素を技術的に可能な範囲で組み合わせたものも、本発明の要旨を包含する限り本発明の範囲に含まれる。
【0190】
その他、本発明の実施形態として上述した車載用頭部位置検出装置、車載用表示装置及び運転支援装置を基にして、当業者が適宜設計変更して実施し得る全ての車載用頭部位置検出装置、車載用表示装置及び運転支援装置も、本発明の要旨を包含する限り、本発明の範囲に属する。
【0191】
その他、本発明の思想の範疇において、当業者であれば、各種の変更例及び修正例に想到し得るものであり、それら変更例及び修正例についても本発明の範囲に属するものと了解される。
【0192】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0193】
10…車載用表示装置、 20…運転支援装置、 50、51、52…車載用頭部位置検出装置、 100…観視者、 100a…搭乗者、 101…目、 105…頭部、 110…映像生成部、 112…光束、 113…投影位置、 114…投影領域、 115…映像投影部、 120…投影部、 121…光源、 122…テーパライトガイド、 123…光源側レンズ、 124…アパーチャ、 125…出射側レンズ、 126…出射側ミラー、 127…駆動部、 130…映像データ生成部、 180…表示オブジェクト、 181…像、 181p…像形成位置、 250…投影位置制御部、 310…送受信器、 311…送信部、 312…受信部、 320…送受信制御部、 350…送信波、 351、352…第1、第2送信波、 355…頭部検出波、 360…反射波、 361、362…第1、第2反射波、 366…頭部検出反射波、 410…警報出力装置、 710…フロントガラス部、 711…反射部、 720…ダッシュボード、 730…車両、 731…操舵装置、 Av…駆動電圧、 Aw…強度、 HS…ハイ状態、 L…距離、 LS…ロウ状態、 R1〜R5…第1〜第5送受信器、 RCS…受信制御信号、 SCS…送信制御信号、 t…時間、 t1〜t5…第1〜第5時刻、 td1…第1動作期間、 td2…第2動作期間
【技術分野】
【0001】
本発明の実施形態は、車載用頭部位置検出装置、車載用表示装置及び運転支援装置に関する。
【背景技術】
【0002】
車両の運転者に光束を投影するヘッドアップディスプレイ(HUD:Head Up Display)がある。運転者の頭部は運転中に移動する。移動した頭部の位置に光束を投影するために、運転者の頭部の位置を正確に検出する技術の実現が望まれている。特に、HUDの中でも運転者の片目に光束を投影する構成においては特に高い精度で頭部の位置を検出することが求められる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−341383号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の実施形態は、頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【課題を解決するための手段】
【0005】
本発明の実施形態によれば、複数の送受信器と、送受信制御部と、を備えた車載用頭部位置検出装置が提供される。前記複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。前記複数の送受信器は、前記頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、前記波が前記頭部によって反射されて得られる波を受信する。前記送受信制御部は、前記複数の送受信器に接続される。前記送受信制御部は、第1動作と、第2動作と、を実施する。前記第1動作は、前記複数の送受信器のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波を前記頭部に向けて送信させる第1送信動作と、前記第1送信波が前記頭部によって反射されて得られる第1反射波を前記複数の送受信器で受信した結果を入手する第1受信動作と、前記入手した前記第1反射波を受信した前記結果に基づいて複数の送受信器のうちで前記頭部に最も近い前記送受信器を検出する送受信器検出動作と、を含む。前記第2動作は、前記検出された前記頭部に最も近い前記送受信器に、音波及び電磁波の少なくともいずれかの頭部検出波を前記頭部に向けて送信させる頭部検出波送信動作と、前記頭部検出波が前記頭部によって反射されて得られる頭部検出反射波を前記複数の送受信器で受信した結果を入手する頭部検出反射波受信動作と、前記入手した前記頭部検出反射波を受信した前記結果に基づいて前記頭部の位置を検出する頭部位置検出動作と、を含む。
【図面の簡単な説明】
【0006】
【図1】実施形態に係る車載用頭部位置検出装置の動作を示すフローチャート図である。
【図2】図2(a)〜図2(c)は、実施形態に係る車載用頭部位置検出装置を示す模式図である。
【図3】図3(a)〜図3(d)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図4】図4(a)〜図4(f)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図5】図5(a)及び図5(b)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図6】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図7】図7(a)及び図7(b)は、実施形態に係る車載用頭部位置検出装置の別の動作を示す模式図である。
【図8】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図9】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図10】実施形態に係る車載用頭部位置検出装置の別の動作を示すフローチャート図である。
【図11】図11(a)〜図11(d)は、実施形態に係る車載用頭部位置検出装置の動作を示す模式図である。
【図12】実施形態に係る車載用表示装置を示す模式図である。
【図13】実施形態に係る車載用表示装置を示すフローチャート図である。
【図14】実施形態に係る運転支援装置を示す模式図である。
【発明を実施するための形態】
【0007】
以下に、各実施形態について図面を参照しつつ説明する。
なお、図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
なお、本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
(第1の実施形態)
図1は、本実施形態に係る車載用頭部位置検出装置の動作を例示するフローチャート図である。
図2(a)〜図2(c)は、本実施形態に係る車載用頭部位置検出装置の構成を例示する模式図である。
【0009】
図2(a)に表したように、本実施形態に係る車載用頭部位置検出装置50は、複数の送受信器310と、送受信制御部320と、を備える。
【0010】
複数の送受信器310は、車両に搭乗する搭乗者100aの頭部105に対向する互いに異なる位置に設けられる。複数の送受信器310は、頭部105に向けて、音波及び電磁波の少なくともいずれかの波(送信波350)を送信する。複数の送受信器310は、その波(送信波350)が頭部105によって反射して得られる波(反射波360)を受信する。例えば、複数の送受信器310は、頭部105に面している。例えば、送受信器310と頭部105の間に遮蔽物が入らないように、送受信器310は設置される。ただし、送受信への悪影響が実質的に無ければ良い。
【0011】
送受信制御部320は、複数の送受信器310に接続される。送受信制御部320と、複数の送受信器310と、は、電気信号や光信号などの有線または無線の方式により接続される。例えば、送受信制御部320は、複数の送受信器310による送信波350の送信のための送信制御信号SCSを複数の送受信器310に供給する。また、送受信制御部320は、複数の送受信器310による反射波360の受信の結果を入手するための受信制御信号RCSを有することができる。
【0012】
例えば、送信波350は音波あり、反射波360は音波である。例えば、送信波350は光であり、反射波360は光である。例えば、送信波350は赤外線であり、反射波360は赤外線である。例えば、送信波350は電波であり、反射波360は電波である。
【0013】
送信波350が音波であり反射波360が音波である場合には、音波よりも高速な光をつかった場合でも、その光モジュールの出力が音波を使った場合よりも遅い事もあるため、音波を使ったほうが処理を高速化できる利点がある。送信波350が超音波である場合には、送受信の時間と受信結果の処理の時間との合計は、例えば10ミリ秒(ms)以上50ms程度であり、短時間に処理が実施できる。以下では、送信波350が音波であり反射波360が音波である場合として説明する。
【0014】
送信波350の周波数は、例えば、約40kHzである。また、送信波350の周波数は、例えば、約20kHzである。送信波350の周波数は、人の可聴範囲以外の周波数である。
【0015】
送信波350の指向性は比較的高く設定される。例えば、送受信器310と頭部105との間の距離は、0.6メートル(m)〜0.8mに設定される。送受信器310と頭部105との間の距離は、例えば約0.7mである。頭部105の位置における送信波350の幅は、例えば0.1m以上0.3m以下程度である。0.15m以上0.25m以下であることがさらに望ましい。これにより、目的とする頭部105に的確に送信波350をあてることができる。
【0016】
例えば、送受信器310から送信した送信波350が、頭部105で反射され、その反射波360が送受信器310で受信されるまでの時間を計測することで、送受信器310と頭部105との間の距離が検出できる。
【0017】
図2(a)に例示した車載用頭部位置検出装置50においては、1つの送受信器310が、送信器の機能と、受信器の機能と、を有している。すなわち、送信器の機能と受信器の機能とが一体化されている。なお、図2(a)においては、4つの送受信器310が描かれているが、送受信器310の数は任意である。
【0018】
図2(b)に表したように、本実施形態に係る別の車載用頭部位置検出装置51においても複数の送受信器310が設けられている。ただし、この例では、送受信器310のそれぞれにおいて送信器の機能と、受信器の機能と、が分離されている。
【0019】
具体的には、複数の送受信器310のそれぞれは、送信部311と受信部312とを含む。すなわち、車載用頭部位置検出装置51においては、複数の送信部311と複数の受信部312とが設けられる。複数の送信部311は、頭部105に対向する互いに異なる位置に設けられる。複数の送信部311は、頭部105に向けて音波及び電磁波の少なくともいずれかの波(送信波350)を送信する。複数の受信部312は、頭部105に対向する互いに異なる位置に設けられる。複数の受信部312は、送信部311により送信された、音波及び電磁波の少なくともいずれかの波(送信波350)が頭部105によって反射されて得られる波(反射波360)を受信する。例えば、複数の送信部311及び複数の受信部312は、頭部105に面している。例えば、これらと頭部105との間に遮蔽物が入らないように、これらは設置される。ただし、送受信への悪影響が実質的に無ければ良い。
【0020】
送信部311が設けられる位置は、受信部312が設けられる位置と必ずしも同じでなくても良い。例えば、送信部311が設けられる位置は、受信部312が設けられる位置とは異なる。1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことができる。
【0021】
図2(c)に表したように、本実施形態に係る別の車載用頭部位置検出装置52においても複数の送受信器310が設けられている。そして、複数の送受信器310のそれぞれは、送信部311と受信部312とを含む。この場合も、1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことができる。
【0022】
図2(c)に示した例では、送信部311の数よりも受信部312の数の方が多い。すなわち、送信部311の数が4であり、受信部312の数が6である。この場合には、例えば、4つの送受信器310と、2つの受信部312が設けられていると見なすことができる。なお、本実施形態において、受信部312の数よりも送信部311の数の方が多くても良い。
【0023】
このように、送信部311と受信部312とが異なる位置に設けられている場合も、1つの送信部311と1つの受信部312との1つの組みを1つの送受信器310と見なすことにする。
【0024】
複数の送受信器310のそれぞれの角度は、送受信器310の指向性に合わせて、送信する波がオーバーラップするように設置される。ただし、送信する波は、過度にオーバーラップしない。送信部311と受信部312とが設けられる場合には、例えば、1つの組となる送信部311及び受信部312において、送信部311の送信の方向は、受信部312の受信の方向と実質的に同じとされることが望ましい。
【0025】
以下では、説明を簡単にするために、送信部311の機能と受信部312の機能とが一体化されている車載用頭部位置検出装置50に関して説明する。
【0026】
実施形態において、搭乗者100aは、車両の運転者である。複数の送受信器310は、例えば搭乗者の頭部105の前方の左右方向に沿って配置される。送受信器310は、例えば、運転席の前方のダッシュボードなどに設けられる。送受信器310は、例えば、車両のフロントガラス上部の屋根部などに設けられる。ただし、実施形態において、送受信器310の設置場所は任意である。
【0027】
ここで、車両の後部から車両の前部に向かう方向をZ軸方向とする。車両の左右方向をX軸方向とする。車両の上下方向をY軸方向とする。
【0028】
例えば、複数の送受信器310の少なくとも2つの、車両の左右方向(X軸方向)に沿う位置は、互いに異なる。例えば、複数の送受信器310のX軸方向に沿う位置のそれぞれは、互いに異なる。これにより、頭部105の左右方向に沿った位置が検出される。
【0029】
例えば、複数の送受信器310の少なくとも2つの、車両の前後方向(Z軸方向)に沿う位置は、互いに異なる。例えば、複数の送受信器310のX軸方向に沿う位置のそれぞれは、互いに異なる。これにより、頭部105の前後方向に沿った位置が検出される。
【0030】
例えば、複数の送受信器310のそれぞれのX軸方向及びZ軸方向における位置が違いに異なる。例えば、複数の送受信器310は、頭部105をX−Z平面において囲む環の少なくとも一部に沿って配置される。
【0031】
さらに、複数の送受信器310の少なくとも2つの、車両の上下方向(Y軸方向)に沿う位置が、互いに異なっても良い。これにより、頭部105の上下方向に沿った位置が検出される。
【0032】
以下、車載用頭部位置検出装置50を例として、送受信制御部320の動作の例について、説明する。なお、送受信器310のそれぞれが送信部311と受信部312とを含む場合は、送受信器310の動作に関する記述において、送信機能に関する動作は送信部311で実施され、受信機能に関する動作は受信部312で実施されるものとすることができる。
【0033】
図1に表したように、送受信制御部320は、第1動作(ステップS150)と、第2動作(ステップS250)と、を実施する。
【0034】
第1動作は、第1送信動作(ステップS110)と、第1受信動作(ステップS120)と、送受信器検出動作(ステップS130)と、を含む。
【0035】
第1送信動作(ステップS110)では、送受信制御部320は、複数の送受信器310のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0036】
第1受信動作(ステップS120)では、送受信制御部320は、第1送信波が頭部105によって反射されて得られる第1反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0037】
送受信器検出動作(ステップS130)では、送受信制御部320は、入手した第1反射波を受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器310を検出する。
【0038】
第2動作は、頭部検出波送信動作(ステップS210)と、頭部検出反射波受信動作(ステップS220)と、頭部位置検出動作(ステップS230)と、を含む。
【0039】
頭部検出波送信動作(ステップS210)では、送受信制御部320は、検出された頭部105に最も近い送受信器310に、音波及び電磁波の少なくともいずれかの頭部検出波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0040】
頭部検出反射波受信動作(ステップS220)では、送受信制御部320は、頭部検出波が頭部105によって反射されて得られる頭部検出反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0041】
頭部位置検出動作(ステップS230)では、送受信制御部320は、入手した頭部検出反射波を受信した結果に基づいて頭部105の位置を検出する。
【0042】
このように、本実施形態に係る車載用頭部位置検出装置50においては、第1動作により、頭部105に最も近い送受信器310を検出する。そして、第2動作において、その送受信器310から送信された送信波350(頭部検出波)の反射波360(頭部検出反射波)を検出することで、頭部105の位置を検出する。すなわち、第2動作の頭部105の位置の検出の際に、頭部105に最も近い送受信器310による送信が用いられる。これにより、頭部の位置を正確に検出できる。
【0043】
以下、本実施形態における動作の具体例について説明する。
図3(a)〜図3(d)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
図3(a)、図3(b)、図3(c)及び図3(d)は、それぞれ、ステップS110、S120、S210及びS220の動作を例示している。
図3(a)に例示したように、この具体例では、送受信器310が4つ設けられている。すなわち、複数の送受信器310は、第1〜第4送受信器R1〜R4(第1〜第4送信部及び第1〜第4受信部と見なすことができる)を含む。
【0044】
図3(a)に表したように、ステップS110(第1送信動作)では、送受信制御部320は、複数の送受信器310のいずれかである例えば送受信器R1に、第1送信波351(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、第1送信波351の送信は、第2〜第4送受信器R2〜R4に実施させても良い。
【0045】
図3(b)に表したように、ステップS120(第1受信動作)では、送受信制御部320は、第1送信波351が頭部105によって反射されて得られる第1反射波362(反射波360のうちの1つ)を第1〜第4送受信器R1〜R4で受信した結果を入手する。
【0046】
そして、ステップS130(送受信器検出動作)では、送受信制御部320は、入手した第1反射波361を受信した結果に基づいて、第1〜第4送受信器R1〜R4のうちで頭部105に最も近い送受信器を検出する。この例では、第1〜第4送受信器R1〜R4のうちで頭部105に最も近い送受信器は、第2送受信器R2であるとする。なお、複数の送受信器310のうちの1つ(例えば第2送受信器R2)と頭部105との距離が、別の1つ(例えば第3送受信器R3)と頭部105との距離と等しい場合には、そのいずれかを最も近い送受信器と見なす。
【0047】
図3(c)に表したように、ステップS210(頭部検出波送信動作)では、送受信制御部320は、第2送受信器R2(頭部105に最も近い送受信器)に、頭部検出波355(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、頭部検出波355の周波数及び大きさなどの波の特性は、第1送信波351と同じでも良く、異なっていても良い。頭部検出波355の周波数及び大きさなどの波の特性を第1送信波351と同じにすることで、例えば、送受信器310の設計及び製造が簡略化される。
【0048】
図3(d)に表したように、ステップS220(頭部検出反射波受信動作)では、送受信制御部320は、頭部検出波355が頭部105によって反射されて得られる頭部検出反射波366(反射波360のうちの1つ)を第1〜第4送受信器R1〜R4で受信した結果を入手する。
【0049】
そして、ステップS230(頭部位置検出動作)では、送受信制御部320は、入手した頭部検出反射波366を受信した結果に基づいて頭部105の位置を検出する。
【0050】
以下、ステップS230(頭部位置検出動作)の例について説明する。
図4(a)〜図4(f)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
これらの図は、ステップS230の動作を例示している。この例では、複数の送受信器310は、第1〜第5送受信器R1〜R5(第1〜第5送信部及び第1〜第5受信部と見なすことができる)を含む場合が示されている。
【0051】
図4(a)〜図4(c)は、頭部105が第1の位置にある場合の動作を例示している。図4(d)〜図4(f)は、頭部105が第2の位置にある場合の動作を例示している。図4(a)及び図4(d)は、第1〜第5送受信器R1〜R5の位置と頭部105の位置との関係を示している。図4(b)及び図4(e)は、第1〜第5送受信器R1〜R5のそれぞれと頭部105との間の距離Lを示している。図4(c)及び図4(f)は、第1〜第5送受信器R1〜R5で検出される距離Lを示している。距離Lは、例えば、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間に基づいて求められる。
【0052】
図4(a)に表したように、第1〜第5送受信器R1〜R5は左右方向に沿ってほぼ等間隔で配置されている。そして、頭部105が第1の位置にある。この例では、第1の位置は、第3送受信器R3のほぼ正面である。
【0053】
図4(b)に表したように、第1〜第5送受信器R1〜R5のそれぞれと頭部105とを結ぶ線分の長さが距離Lである。
【0054】
頭部105で反射した頭部検出反射波366が第1〜第5送受信器R1〜R5のそれぞれに到達する時間は、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lに依存する。このため、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間を計測することで、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lを検出できる。
【0055】
図4(c)に表したように、第3送受信器R3と頭部105との距離Lが、他の送受信器と頭部105との距離Lよりも短い。
【0056】
図4(d)に表したように、頭部105が第2の位置にある。この例では、第2の位置は、第4送受信器R4のほぼ正面である。
【0057】
図4(e)に表したように、第2の位置における距離Lは、第1の位置における距離Lから変化する。
【0058】
図4(f)に表したように、この例では、第4送受信器R4で検出される距離Lが、一番短い。距離Lは、頭部105の位置と、第1〜第5送受信器R1〜R5のそれぞれの位置と、の相対関係によって変化する。
【0059】
このように、第1〜第5送受信器R1〜R5で頭部検出反射波366を検出した時間を計測することで、頭部105と第1〜第5送受信器R1〜R5のそれぞれとの間の距離Lを検出し、これに基づいて、頭部105の位置を検出できる。
【0060】
例えば、N個の送受信器310が設けられる場合において、送受信器310のそれぞれと頭部105との距離Lの長さの線分を導入する。この線分の一端の位置は、送受信器310のそれぞれの位置に固定される。複数の線分の他方の位置が互いに重なる位置が、頭部105の位置となる。
【0061】
本実施形態に係る車載用頭部位置検出装置50においては、第2動作(ステップS210、220及び230)により、頭部105の位置を検出する。
このとき、第1動作(ステップS110、120及び130)により、頭部105に最も近い送受信器310を検出する。そして、第2動作において、その送受信器310から送信された送信波350(頭部検出波)の反射波360(頭部検出反射波)を検出することで、頭部105の位置を検出する。すなわち、第2動作の頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波が用いられる。これにより、頭部105の位置を正確に検出できる。
【0062】
例えば、複数の送受信器310が設けられる場合において、頭部105から遠い送受信器310を用いて、ステップS210(頭部検出波送信動作)を実施した場合は、車両内の屋根や後部座席などの、検出の目的ではない物体による反射の影響が大きくなる。このため、頭部105の位置の検出精度が低い場合がある。
【0063】
これに対し、実施形態においては、ステップS210(頭部検出波送信動作)が、頭部105に最も近い送受信器310により実施されるため、検出の目的ではない物体による反射の影響が小さくできる。すなわち、反射波360における時間的な外乱が抑制される。これにより、頭部105の位置の検出精度が高い。
【0064】
なお、頭部の位置(特に目の位置)を検出する方法として、カメラで頭部(顔)を撮像し、この像に画像処理を施し、顔や目などの位置を検出する参考例が考えられる。しかし、カメラで撮像して得られる像は、光(例えば外光)の影響を大きく受ける。このため、ロバストな画像処理が困難であり、位置の検出精度が低い場合がある。さらに、この方法においては、画像処理のために高性能な処理回路が必要であり、また、高価なカメラを用いる。このため、この方法を用いるとコストが大きく上昇する。さらに、位置の検出範囲を広げるためにカメラの撮像範囲を広げると、位置の検出精度が低下する。逆に、位置の検出精度を上げようとして撮像範囲を狭めると、例えば、検出可能な範囲が狭まる。
【0065】
これに対し、実施形態においては、検出信号(反射波)が外光などからの影響を受け難いため、外光などの外乱に対してロバストである。また、波の送信及び受信の単純な機能を有する送受信器310を用いるため、画像処理などの複雑な処理を必要としない。このため、処理回路のコストは低い。また、複数の複数の送受信器310を異なる位置に配置し、この配置の位置の範囲を広くすることで、位置の検出範囲は広い。そして、頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波を用いることで、位置の検出範囲は広く維持しつつ、検出精度は高い。例えば、左右の広い範囲において高い精度で位置が検出できる。これにより、運転者の動きを正確に逐次検出できる。
【0066】
なお、ソナーやレーダなどのように、波を送信し、その反射波を受信することで、周囲の物体を認識する構成がある。そして、複数の送信器と複数の受信器とを用いる構成も考えられる。この構成においては、周囲にある不特定の物体の存在を検出することが目的である。このため、複数の送信器のうちの特定の送信器が、検出の目的とする特定の物体との関係で選択されることがないと考えられる。
【0067】
これに対し、実施形態においては、検出の目的とする特定の物体は、車両に搭乗する搭乗者100aの頭部105である。このため、頭部105の位置の検出の際に、頭部105に最も近い送受信器310から送信された波を用いることで、頭部105の位置を高精度に検出できる。
【0068】
また、車両用表示装置として、運転者の頭部位置を検出する位置検出装置で検出された運転者の頭部位置の変化から運転者の目の位置を求め、表示情報の表示位置を、求められた目の位置に応じた位置になるように制御する参考例がある。この参考例において、位置検出装置として、赤外線センサまたは超音波センサを用い、複数のセンサを縦方向及び横方向に設置する構成がある。しかし、この場合は、複数のセンサが用いられるものの、赤外線または超音波を発生させる複数の波発生部のうちで、検出の目的とする物体(頭部)に最も近い波発生部を特定して、これを用いることがない。このため、この参考例においても、検出の精度は低い。
これに対し、実施形態においては、頭部105に最も近い送受信器310から送信された波を用いることで、頭部105の位置を高精度に検出できる。
【0069】
以下、実施形態に係る車載用頭部位置検出装置の動作の具体例についてさらに説明する。
【0070】
図5(a)及び図5(b)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
すなわち、これらの図は、車載用頭部位置検出装置50における制御のタイミングチャートである。図5(a)は、送受信制御部320から送受信器310に供給される送信制御信号SCSを例示している。図5(b)は、複数の送受信器310によって受信した反射波360の結果を入手するための受信制御信号RCSを例示している。
【0071】
なお、本実施形態において、送受信器310が、送信部311と受信部312とを含む場合は、送信制御信号SCSにより、送信部311の送信動作が制御される。例えば、受信部312が常に反射波360を受信しているときは、受信制御信号RCSにより、反射波360の受信結果を送受信制御部320が入手するタイミングが制御される。また、例えば、受信部312が、特定の信号が入力されたときに反射波360を受信する場合は、受信制御信号RCSにより、受信部312が反射波360を受信するタイミングが制御される。
【0072】
また、本実施形態において、送受信器310において送信機能と受信機能とが分離されてない場合は、送信制御信号SCSにより、送受信器310の送信が制御される。そして、受信制御信号RCSにより、送受信器310が反射波360を受信するタイミングが制御され、その結果を送受信制御部320が入手するタイミングが制御される。
【0073】
図5(a)に表したように、送信制御信号SCSにおいては、第1時刻t1から第2時刻t2までの期間において、ハイ状態HSである。この第1時刻t1から第2時刻t2までの期間において、複数の送受信器310のいずれか(例えば第1送受信器R1)から、送信波350(例えば第1送信波351)が送信される。
【0074】
本実施形態においては、時刻t2から一定の期間が経過するまでの反射波360の受信結果は入手されない。または、受信結果を入手しても、その受信結果は使用されない。
例えば、図5(b)に表した第1時刻t1から第3時刻t3までの期間は、送信波350が目的とする頭部105で反射した反射波360が送受信器310に届く期間ではない。例えば、第1時刻t1から第3時刻t3までの期間においては、例えば特定の送受信器310から別の送受信器310に波が直接届く。また、この期間においては、頭部105で反射した波ではなく、車両の操舵装置などで反射した波が送受信器310に届く。すなわち、この期間において受信した波は、目的とする反射波360、すなわち、頭部105で反射した波ではない。
【0075】
第1時刻t1から第3時刻t3まで、受信制御信号RCSはロウ状態LSとされる。これにより、この期間において受信した波は、検出の対象から除外される。
【0076】
そして、第3時刻t3から第4時刻t4の間に期間おいて、受信制御信号RCSは、ハイ状態HSとなる。この期間において、反射波360の受信結果が送受信制御部320により入手される。また、この期間において入手された受信結果が使用される。
【0077】
例えば、第3時刻t3から第4時刻t4までの期間のなかで、複数の送受信器310における反射波360の受信の時刻が異なる。これにより、複数の送受信器310のそれぞれと頭部105との間の距離Lが検出される。
【0078】
そして、第4時刻t4よりも後においては、受信制御信号RCSはロウ状態となる。これにより、第4時刻t4以降の時刻に届く2次反射波などが除外される。
【0079】
例えば、送受信器310と頭部105との間の距離が約0.7mである場合、第1時刻t1から第3時刻t3までの期間(第1動作期間td1)は、例えば、約5msである。すなわち、約5ms以前に届く波は、目的とする反射波ではないため、除外される。
【0080】
送受信器310と頭部105との間の距離が約0.7mである場合、第3時刻t3から第5時刻t5までの期間(第2動作期間td2)は、例えば、約4msである。
【0081】
例えば、第1時刻t1から第3時刻t3までの期間が、第1送信動作の期間に相当し、第3時刻t3から第5時刻t5までの期間が、第1受信動作の期間に相当する。
【0082】
または、例えば、第1時刻t1から第3時刻t3までの期間が、頭部検出波送信動作の期間に相当し、第3時刻t3から第5時刻t5までの期間が、頭部検出反射波受信動作の期間に相当する。
【0083】
このように、本実施形態において、送受信制御部320は、第1送信波351の送信(例えば第2時刻t2)の後に、予め定められた第1期間(第2時刻t2から第3時刻t3までの期間が経過した後に、第1受信動作を実施する(開始する)。そして、送受信制御部320は、頭部検出波355の送信(例えば第2時刻t2)の後に予め定められた第2期間(第2時刻t2から第3時刻t3までの期間)が経過した後に、頭部検出反射波受信動作を実施する(開始する)。
【0084】
これにより、目的とする反射波360以外の波を除いて、目的とする反射波360を受信(受信結果を入手)できる。これにより、検出の精度が向上できる。
【0085】
また、本実施形態において、送受信制御部320は、第1受信動作が開始して(第3時刻t3)から予め定められた第3期間(第3時刻t3から第4時刻t4までの期間)が経過したら、第1受信動作を終了する。そして、送受信制御部320は、頭部検出反射波受信動作が開始して(第3時刻t3)から予め定められた第4期間(第3時刻t3から第4時刻t4までの期間)が経過したら、頭部検出反射波受信動作を終了する。
【0086】
これにより、第4時刻t4以降の時刻に届く2次反射波などが除外され、目的とする反射波360を受信(受信結果を入手)できる。これにより、検出の精度が向上できる。
【0087】
さらに、送受信制御部320は、頭部検出反射波受信動作を終了した後(第4時刻t4の後)に、予め定められた期間(第4時刻t4から第5時刻t5までの期間)が経過してから、次の送信動作を実施する。すなわち、この期間の2次反射波などが送受信器310に到達し終わり、ノイズが無くなった状態で、次の送信動作(例えば第1送信動作または頭部検出波送信動作)を実施する。このように、目的とする反射波を受信してから、所定の期間が経過した後に次の送信動作を実施することで、ノイズを抑制でき、検出精度が高まる。
【0088】
図6は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図6に表したように、この動作においては、第1動作(ステップS150)は、第2送信動作(ステップS111)と、第2受信動作(ステップS121)と、をさらに含む。
【0089】
第2送信動作(ステップS111)においては、送受信制御部320は、第1受信動作(ステップS120)の後に、複数の送受信器310の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波(送信波350のうちの1つ)を頭部105に向けて送信させる。
【0090】
第2受信動作(ステップS121)においては、送受信制御部320は、第2送信波が頭部105によって反射されて得られる第2反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0091】
そして、送受信器検出動作(ステップS130)は、上記で入手した第2反射波を受信した結果にさらに基づいて実施される。
【0092】
このように、この例では、ステップS120とステップS130との間に、ステップS111及びステップS121が実施される。
【0093】
図7(a)及び図7(b)は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示する模式図である。
図7(a)及び図7(b)は、それぞれ、ステップS111及びステップS121の動作を例示している。
この具体例では、複数の送受信器310は、第1〜第4送受信器R1〜R4(第1〜第4送信部及び第1〜第4受信部と見なすことができる)を含む。図3(b)に例示したステップS120の後に、図7(a)及び図7(b)に例示するステップS111及びステップS121が実施される。
【0094】
図7(a)に表したように、ステップS111においては、送受信制御部320は、例えば第2送受信器R2(複数の送受信器310の別のいずれか)に、第2送信波352(送信波350のうちの1つ)を頭部105に向けて送信させる。なお、第2送信波352の送信は、例えば、第3送受信器R3または第4送受信器R4により実施されても良い。
【0095】
図7(b)に表したように、ステップS121においては、送受信制御部320は、第2送信波352が頭部105によって反射されて得られる第2反射波362(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0096】
そして、送受信器検出動作(ステップS130)は、上記で入手した第2反射波362を受信した結果にさらに基づいて実施される。すなわち、送受信検出動作においては、第1反射波361を受信した結果に加え、第2反射波362を受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。これにより、複数の送受信器310のうちで頭部105に最も近い送受信器をさらに高い精度で検出できる。これによりさらに高い精度で頭部105の位置を検出できる。
【0097】
図8は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
この例では、N(Nは1以上の整数)個の送受信器310が設けられる。そして、M個(Mは、1以上でN以下の整数)の送受信器310において、送信波350の送信が行われる。
【0098】
例えば、図8に表したように、整数iが設定され、iが0に設定される(ステップS101a)。そして、iに1が加えたものが新しいiとされる(ステップS102a)。
【0099】
送受信制御部320は、第i送受信器(複数の送受信器310の別のいずれか)に、第i送信波(送信波350のうちの1つ)を頭部105に向けて送信させる(ステップS110a)。
【0100】
送受信制御部320は、第i送信波が頭部105によって反射されて得られる第i反射波(反射波360のうちの1つ)を複数の送受信器310で受信した結果を入手する。
【0101】
そして、iとMが比較される(ステップS115a)。iがM未満の場合は、ステップS102aに戻る。そして、ステップS110a及びステップS120aが実施される。
【0102】
これにより、M個の送受信器310を用いて、ステップS110a及びステップS120aが実施される。MがNと等しいときは、N個の送受信器310の全てを用いて、ステップS110a及びステップS120aが実施される。すなわち、送受信器310の全てにより送信波350を順次送信し、順次送信された送信波350によって反射されて得られる反射波360を複数の送受信器310で順次受信した結果が順次入手される。この結果は、例えば、適宜、情報格納部に格納される。
【0103】
iがM以上の場合に、ステップS130が実施される。
ステップS130においては、M個の送受信器310を用いた送信波350による反射波360を複数の送受信器310で順次受信した結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。MがNと等しいときは、N個の送受信器310の全てを用いた結果に基づいて、複数の送受信器310のうちで頭部105に最も近い送受信器を検出する。これにより、より高い精度で、頭部105に最も近い送受信器を検出できる。
【0104】
図9は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図9に表したように、この例では、送受信制御部320は、第1動作(ステップS150)と第2動作(ステップS250)とを繰り返し実施する。これにより、頭部105の位置を継続的に検出することができる。すなわち、頭部105の位置の時間変化が検出できる。
【0105】
なお、このとき、第1動作は、N個の送受信器310の全てを用いて実施されても良く、N個の一部のM個の送受信器310を用いて実施されても良い。ここでMは、1でも良い。
【0106】
図10は、本実施形態に係る車載用頭部位置検出装置の別の動作を例示するフローチャート図である。
図10に表したように、この例でも、送受信制御部320は、第1動作と第2動作とを繰り返し実施する。
【0107】
そして、ステップS210において送信された頭部検出波355によってステップS220が実施されるのに加えて、ステップS210において送信された頭部検出波355によってステップS120aが実施される。すなわち、ステップS210において、検出された頭部105に最も近い送受信器310から頭部検出波355が頭部105に向けて送信される。この頭部検出波355の反射波(頭部検出反射波366)を検出する(ステップS120a)ことで、頭部105に最も近い送受信器310を検出する(ステップS130)。
【0108】
このように、この例では、第1受信動作(ステップS110a)においては、送受信制御部320は、過去に実施された頭部検出波送信動作(ステップS210)の頭部検出波355が頭部105によって反射されて得られる反射波(頭部検出反射波366)を複数の送受信器310で受信した結果を第1反射波361として入手する。
【0109】
すなわち、第1動作と第2動作とを繰り返して実施する場合に、ステップS110aにおける送信波350の送信が、頭部105に最も近い送受信器310により行われることに相当する。これにより、ステップS130における最も頭部105に近い送受信器310の検出の精度がより高まる。また、第1動作及び第2動作の組みの実施の時間が短縮できる。これにより、頭部105の速い動きにも追従して頭部105の位置を検出できる。
【0110】
すなわち、第1動作と第2動作とは繰り返して実施され、第1送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310とされる。
【0111】
さらに、第i送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310としても良い。
【0112】
さらに、例えば、第i送信動作における複数の送受信器310のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310の隣の送受信器310としても良い。
【0113】
すなわち、第1動作は、第2送信動作と、第2受信動作と、をさらに含む。第2送信動作においては、送受信制御部320は、第1受信動作の後に、複数の送受信器310の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波352を頭部105に向けて送信させる。第2受信動作においては、送受信制御部320は、第2送信波352が頭部105によって反射されて得られる第2反射波362を複数の送受信器310で受信した結果を入手する。そして、送受信器検出動作は、入手した第2反射波362を受信した結果にさらに基づいて実施される。そして、送受信制御部320は、第1動作と第2動作とを繰り返し実施する。第2送信動作における複数の送受信器310の別のいずれかは、過去に実施された送受信器検出動作において検出された頭部105に最も近い送受信器310の隣の送受信器310とすることができる。
【0114】
これにより、最も頭部105に近い送受信器310の検出の精度がより高まる。また、頭部105の速い動きにも追従して頭部105の位置を検出できる。
【0115】
図11(a)〜図11(d)は、本実施形態に係る車載用頭部位置検出装置の動作を例示する模式図である。
図11(a)及び図11(b)は、送信波350の強度(振幅)が大きい場合を例示している。図11(c)及び図11(d)は、送信波350の強度(振幅)が小さい場合を例示している。図11(a)及び図11(c)は、送受信器310において送信波350を出力する際の駆動電圧Avを模式的に例示している。図11(b)及び図11(d)は、送受信器310から出力される送信波350の強度Aw(振幅)を模式的に例示している。これらの図の横軸は時間tである。
【0116】
図11(a)及び図11(c)に表したように、送受信器310(例えば送信部311)は、駆動電圧Avが大きい場合と小さい場合とを有することができる。駆動電圧Avが大きい場合には、駆動電圧Avのピークツーピークの電圧は、例えば10V(ボルト)である。駆動電圧Avが小さい場合には、駆動電圧Avのピークツーピークの電圧は、例えば5Vである。このように、駆動電圧Avは可変である。
【0117】
このように、駆動電圧Avを変更することで、図11(b)及び図11(d)に表したように、送信波350の強度Awは変更可能である。
【0118】
送受信器310における駆動電圧Avの変更は、例えば、送受信制御部320によって制御される。
【0119】
なお、図11(a)及び図11(c)に例示した駆動電圧Avは、例えば40kHzまたは20kHzの周波数を有する。このとき、図11(b)及び図11(d)に例示した送信波350は、40kHzまたは20kHzの周波数を有する。
【0120】
送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することができる。
【0121】
具体的には、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離であるときには、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを第1強度とする。送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離よりも長い第2距離のときには、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを第1強度よりも強い第2強度にする。
【0122】
例えば、車両内のシートの前後位置により、頭部105と送受信器310との距離が変化する。このとき、送受信器310と頭部105との間の距離に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することで、例えば、適切な感度での検出ができる。
【0123】
複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、任意の方法により入手できる。
【0124】
例えば、送受信制御部320は、車両に設けられ搭乗者100aが座るシートの位置に関する情報を入手することができる。この情報の入手には、車両に設けられるCAN(Controller Area Network)を利用することができる。そして、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、入手したシートの位置に関する情報に基づいて求められることができる。
【0125】
さらに、送受信制御部320は、第1動作と第2動作とを実施し、頭部105の位置を検出することで、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報を得ることができる。すなわち、送受信制御部320は、第1動作と第2動作とを複数回実施する。複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、過去に実施された第2動作によって検出された頭部105の位置に関する情報に基づいて求められる。
【0126】
このようにして求められた送受信器310と頭部105との間の距離に基づいて、第1送信波351の強度及び頭部検出波355の強度の少なくともいずれかを変更することで、例えば、適切な感度での検出ができる。
【0127】
さらに、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報に基づいて、第1送信動作及び第1受信動作の時間に関する条件、及び、頭部検出波送信動作及び頭部検出反射波受信動作の時間に関する条件の少なくともいずれかを変更できる。
【0128】
例えば、送受信制御部320は、送受信器310と頭部105との間の距離に関する情報に基づいて、第1送信動作と第1受信動作との間の時間(例えば第2時刻t2から第3時刻t3までの時間)、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間(例えば第2時刻t2から第3時刻t3までの時間)の少なくともいずれかを変更することができる。
【0129】
例えば、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離であるときには、第1送信動作と第1受信動作との間の時間、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間の少なくともいずれかを第1時間とする。そして、送受信制御部320は、複数の送受信器310の少なくともいずれかと頭部105との間の距離が第1距離よりも長い第2距離のときには、第1送信動作と第1受信動作との間の時間、及び、頭部検出波送信動作と頭部検出反射波受信動作との間の時間の少なくともいずれかを第1時間よりも長い第2時間にする。
【0130】
これにより、目的としていない反射波を効率良く除外し、頭部105で反射した反射波360を的確に受信できる。これにより、位置の検出の精度がさらに向上する。
【0131】
この場合も、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報は、任意の方法により入手できる。例えば、送受信制御部320は、車両に設けられ搭乗者100aが座るシートの位置に関する情報を入手し、これに基づいて、複数の送受信器310と頭部105との間の距離に関する情報を求めることができる。さらに、送受信制御部320は、第1動作と第2動作とを繰り返し実施し、頭部105の位置を検出することで、複数の送受信器310の少なくともいずれかと頭部105との間の距離に関する情報を得ることができる。
【0132】
このように、本実施形態に係る車載用頭部位置検出装置は、複数の送受信器310(送信部311及び受信部312)を用いる。送受信器310は、例えば、超音波を用いる。送受信器310(受信部312)は、例えば、超音波センサである。複数の超音波センサを利用して頭部105の位置を検出することで、例えば、処理コストの削減、ハードウェアの簡素化、及び、外光に依存しないロバストな検出が実現できる。
【0133】
例えば、N個の送受信器310を利用し、1つの送受信器310から送信された超音波の反射波をN個の送受信器310で受信する。次に、所定の時間の後に、別の送受信器310から送信された超音波の反射波をN個の送受信器310で受信する。これを順次、N個の送受信器310を用いて繰り返す。そして、この結果に基づいて、頭部105に最も近い送受信器310を検出する。これにより、外乱の影響が抑制された状態で、頭部105に最も近い送受信器310が検出できる。
【0134】
そして、検出された頭部105に最も近い送受信器310から送信された超音波の反射波を、N個の送受信器310で受信することで、頭部105の位置を検出する。これにより、外乱の影響が抑制された状態で、頭部105の位置を検出できる。
【0135】
さらに、検出された頭部105に最も近い送受信器310から送信された超音波の反射波を受信することで、頭部105に最も近い送受信器310を改めて検出する。上記を繰り返すことで、頭部105に近い送受信器310から送信された超音波を利用して、高い精度で頭部105の位置を検出することができる。
【0136】
例えば、第i送受信部から送信波が送信された時刻を基準にして、N個の送受信器310(受信部312)のそれぞれが反射波を受信した時刻が記憶される。これにより、N個の送受信器310(受信部312)のそれぞれと頭部105との間の距離が算出される。N個の送受信器310のうちで一番早く反射波を受信した送受信器310から超音波を出射し、N個の送受信器310で反射波を受信し、その結果に基づいて頭部105の位置を検出する。
【0137】
それ以降は、N個の送受信器310のうちで一番早く反射波を受信した送受信器310またはその付近の送受信器310(例えば隣の送受信器310など)から超音波を出射し、N個の送受信器310で反射波を受信し、頭部105の位置を検出する。さらに、そのときに頭部105に一番近い送受信器310を検出する。
【0138】
上記を繰り返す。これにより、例えば、搭乗者100aの姿勢が大きく変化しても、送信波が効率良く搭乗者100aにあたり、効率良く反射する。これにより、検出の精度が高まる。
【0139】
送信する超音波の強度(音圧)は、計測目標(頭部105)と超音波センサとの間の距離に適合する強度であることが望ましい。例えば、運転席のシートの位置に関する情報がCANにより取得され、この情報に基づいて、音圧を制御することが望ましい。例えば、電子式スライドシードなどによるシート位置メモリ機能などが利用できる。例えば、シートの位置と、搭乗者100a運転者)と超音波センサと間の距離と、に関する情報を利用できる。例えば、この情報は、表または変換関数により取得できる。
【0140】
また、複数の超音波センサのうちの1つ(例えば運転席の正面の超音波センサ)を使い、計測目標(頭部105)と超音波センサとの間の距離を求めても良い。この計測結果の情報に基づいて、音圧を制御することができる。これにより、目的としない物体で反射した反射波による折り返しノイズが軽減できる。
【0141】
(第2の実施形態)
図12は、本実施形態に係る車載用表示装置の構成を例示する模式図である。
図12に表したように、本実施形態に係る車載用表示装置10は、車両730に搭載される。車両730は、例えば、四輪車、三輪車、トラック、バスなどの、人が搭乗して操縦できる任意の移動体を含む。
【0142】
車載用表示装置10は、車載用頭部位置検出装置50と、映像投影部115と、投影位置制御部250と、を備える。
【0143】
車載用表示装置10においては、実施形態に係る任意の車載用頭部位置検出装置及びその変形を用いることができる。以下では、車載用頭部位置検出装置50を用いる場合として説明する。
【0144】
映像投影部115は、頭部105に映像情報を含む光束112を投影する。
【0145】
投影位置制御部250は、車載用頭部位置検出装置50によって検出された頭部105の位置に基づいて、映像投影部115に含まれる光学部品の少なくともいずれかの位置、角度及び配置の少なくともいずれかを制御して、光束112の投影位置113を制御する。すなわち、検出された頭部105の位置に光束112が投影されるように、光束112の投影位置113を制御する。例えば、投影位置制御部250は、光束112の投影位置113を、頭部105の動きに追従させる。
【0146】
この例では、車載用表示装置10は、映像を含む光束112を反射部711に反射させて車両730に搭乗する観視者100に投影する。観視者100は、搭乗者100aである。観視者100は、例えば車両730の操舵装置731(ハンドル、ステアリングホイール)を操作する運転者である。
【0147】
反射部711には、例えばコンバイナが用いられる。
反射部711は、例えば、フロントガラス部710の少なくとも一部とすることができる。フロントガラス部710は、車両730のフロントガラスを含むことができる。反射部711は、例えば、車両730のフロントガラスの室内側に設けられる。
【0148】
反射部711は、例えば、フロントガラスの車両730の室内側の面に設けられる。また、反射部711は、フロントガラスよりも車両730の室内側に、フロントガラスから離間して設けられても良い。反射部711は、車載用表示装置10に含まれても良い。反射部711は、車載用表示装置10に含まれる筐体に格納可能でも良い。
【0149】
映像投影部115は、例えば、光束112を、車両730のフロントガラス部710に設けられる反射部711に反射させて、観視者100の頭部105に投影する。映像投影部115は、例えば、映像データ生成部130と、映像生成部110と、投影部120と、を含む。
【0150】
映像データ生成部130は、表示オブジェクト180を含む映像に対応する映像データを生成し、映像生成部110に供給する。
【0151】
表示オブジェクト180は、車載用表示装置10が観視者100に提示する映像に設けられるものである。表示オブジェクト180は、例えば、車載用表示装置10が搭載される車両730の運行情報に関する情報を含む。表示オブジェクト180は、車両730の速度、進行方向を示す「矢印」、及び、変速機の状態などの種々の内容を含むことができる。表示オブジェクト180は、車両730の経路案内に関する情報を含むことができる。
【0152】
映像生成部110には、例えば、液晶表示装置(LCD)などの光スイッチが用いられる。映像生成部110は、映像データ生成部130から供給された映像データに基づいて、映像生成部110の画面に映像を形成する。
【0153】
投影部120には、例えば、各種の光源、レンズ、ミラー、及び、発散角(拡散角)を制御する各種の光学素子が用いられる。
本具体例では、投影部120は、光源121と、テーパライトガイド122と、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、出射側ミラー126と、を含む。
【0154】
光源121は光束112となる光を生成する。光束112となる光の進行方向に沿って、光源121と出射側ミラー126との間にテーパライトガイド122が配置され、テーパライトガイド122と出射側ミラー126との間に光源側レンズ123が配置され、光源側レンズ123と出射側ミラー126との間にアパーチャ124が配置され、アパーチャ124と出射側ミラー126との間に出射側レンズ125が配置される。この構成により、投影部120は、光束112の発散角を制御することができる。
【0155】
本具体例では、テーパライトガイド122と光源側レンズ123との間に、映像生成部110(例えばLCD)が配置されている。
【0156】
光源121には、LED(Light Emitting Diode)や高圧水銀ランプ、ハロゲンランプ、レーザなど各種のものを用いることができる。光源121にLEDを用いることで、消費電力を低減でき、また装置を軽量化でき、小型化できる。
【0157】
映像データ生成部130、映像生成部110及び投影部120のそれぞれの構成は、種々の変形が可能である。映像生成部110に含まれる要素と、投影部120に含まれる要素と、の配置は任意であり、例えば、投影部120に含まれる要素どうしの間に、映像生成部110(及びそれに含まれる要素)が挿入されていても良い。
【0158】
例えば、光源121から出射された光は、テーパライトガイド122において発散角がある程度の範囲に制御される。そして、その光は、映像生成部110を経ることで、所定の表示オブジェクト180を含む映像を含む光束112となる。
【0159】
本具体例では、出射側ミラー126は、凹面状であり、これにより、光束112に含まれる映像情報の像が拡大されて観視者100に投影される。
【0160】
光束112は、出射側ミラー126で反射した後、反射部711で反射して、観視者100の目101に到る。
【0161】
観視者100は、反射部711を介して、像形成位置181pの位置に形成された表示オブジェクト180の像181(虚像)を知覚する。このように、車載用表示装置10は、HUDとして使用できる。
【0162】
出射側ミラー126は可動式とすることができる。例えば、観視者100の頭部105の位置や動きに合わせて、手動で、または、自動で、出射側ミラー126の位置や角度を調節し、光束112を目101に向けて適切に投影させることができる。
【0163】
映像投影部115は、駆動部127をさらに含む。駆動部127は、映像投影部115に含まれる光学素子の角度や位置などを変化させるモータなどを含む。本具体例では、駆動部127は、出射側ミラー126の角度や位置などを変える。実施形態はこれに限らず、駆動部127は映像投影部115に含まれる任意の光学素子の角度や位置などを変えることができる。駆動部127によって光学素子の角度や位置を変えることで、光束112の出射方向が変化する。これにより、例えば観視者100の位置における光束の投影位置113が制御される。
なお、映像投影部115は、上記の例の他に各種の変形が可能である。
【0164】
車載用表示装置10の映像投影部115は、例えば、車両730のダッシュボード720の内部に設けられることができる。
【0165】
一方、映像データ生成部130は、必ずしも映像投影部115と一体的に設けられなくても良い。映像データ生成部130は、例えば、ダッシュボード720の内部ではなく、車両730の任意の場所に設置しても良い。映像データ生成部130からの映像データは、電気信号や光信号などの有線または無線の方式により、映像投影部115(の映像生成部110)に供給される。
【0166】
車載用頭部位置検出装置50の複数の送受信器310(例えば送信部311及び受信部312)は、例えば、車両730のダッシュボード720の上やフロントガラス部710の上部の屋根部などに設けられる。ただし、実施形態において、送受信器310の設置場所は、技術的に可能な範囲で、任意である。
【0167】
送受信制御部320は、車両730内の任意の場所に設置される。送受信制御部320は、例えば、ダッシュボード720の内部などに設けられる。
【0168】
送受信制御部320は、投影位置制御部250と接続される。送受信制御部320は、投影位置制御部250と、電気信号や光信号などの有線または無線の方式により、接続される。
【0169】
車載用表示装置10において、光束112は、例えば、片方の目101で観視される。この場合には、両目で常時観視されないように、光束112の広がりが制御される。これにより、光束112は片方の目101に投影され、両目には投影されない。例えば、光束112は片方の目101だけに投影される。例えば、観視者100の位置における光束112の投影領域114の大きさは、片方の目101が入り、両目が入らない大きさに設定される。
【0170】
観視者100の両目(瞳)の間隔は、例えば、60ミリメートル(mm)〜75mmである。観視者100の位置における光束112の左右方向の幅(投影領域114の左右方向の幅)は、例えば75mm以下設定される。さらに、65mm以下に設定されても良く、さらに60mm以下に設定されても良い。この投影領域114の大きさは、例えば、主に投影部120に含まれる光学素子によって制御される。
【0171】
このように、映像投影部115は、光束112を観視者100の片目のみに投影するように光束112の発散を制御する発散角制御素子を含む。発散角制御素子は、例えば、アパーチャ124である。発散角制御素子は、例えば、光源側レンズ123と、アパーチャ124と、出射側レンズ125と、の組である。
【0172】
反射部711(例えばフロントガラス部710)は、観視者100からの距離が21.7cm以上の位置に配置される。これにより、観視者100が映像を片方の目101で観視した場合において、知覚する奥行き感が増強され、また、表示オブジェクト180を所望の奥行き位置に知覚させ易くできる。
【0173】
なお、本実施形態において、光束112は観視者100の両目に投影され、観視者100は両目で表示オブジェクト180を観視しても良い。
【0174】
投影位置制御部250は、映像投影部115を制御して、観視者100の位置における光束112の位置(投影位置113)を制御する。
【0175】
例えば、光束112が片方の目101で観視される場合には、光束112の断面形状(光束112の進行方向に対して垂直な平面で光束112を切断したときの断面形状)の左右方向の長さは、上下方向の長さよりも短い。これにより、片方の目101で観視でき、さらに、上下方向の観視範囲が広がる。
【0176】
投影位置制御部250は、車載用頭部位置検出装置50によって検出した頭部105の位置に基づいて、光束112の投影位置113を変更する際に、特に、光束112の投影位置の左右方向に沿った位置を変更する。これにより、頭部105の位置が変化して目101の位置が変化したときにも、片方の目101への光束112の投影を維持することができる。
【0177】
図13は、本実施形態に係る車載用表示装置の動作を例示するフローチャート図である。
図13に表したように、本実施形態に係る車載用表示装置10においては、車載用頭部位置検出装置50によって第1動作(ステップS150)及び第2動作(ステップS250)が実施されて頭部105の位置が検出され、その結果に基づいて、投影位置制御部250が、映像投影部115を制御して、光束112の投影位置113を制御する(ステップS310)。
【0178】
そして、ステップS150、ステップS250及びステップS310が繰り返し実施される。これにより、光束112の投影位置113は、頭部105の動きに追従して制御される。
【0179】
本実施形態に係る車載用表示装置10によれば、頭部の位置を正確に検出できるので、目101(特に片方の目101)の位置に映像を的確に表示できる。
【0180】
(第3の実施形態)
図14は、本実施形態に係る運転支援装置の構成を例示する模式図である。
図14に表したように、本実施形態に係る運転支援装置20は、車両730に搭載される。
【0181】
運転支援装置20は、車載用頭部位置検出装置50と、警報出力装置410と、を備える。
【0182】
運転支援装置20は、さらに、映像投影部115及び投影位置制御部250を備えても良い。これにより、第2実施形態に関して説明した表示がさらに実施できる。ただし、運転支援装置20において、映像投影部115及び投影位置制御部250は必要に応じて設けられ、省略しても良い。
【0183】
運転支援装置20においては、実施形態に係る任意の車載用頭部位置検出装置及びその変形を用いることができる。以下では、車載用頭部位置検出装置50を用いる場合として説明する。
【0184】
警報出力装置410は、車載用頭部位置検出装置50によって検出された頭部105の位置に基づいて、搭乗者100a(観視者100)の運転状態を推定する。警報出力装置410は、推定された運転状態に基づいて、音、光及び震動の少なくともいずれかを含む警報を出力する。
【0185】
警報出力装置410は、搭乗者100aの運転状態として、不注意運転などを推定する。例えば、不注意運転は居眠り運転などを含む。例えば、頭部105の位置の変化が少なくなったときに、搭乗者100aが居眠り運転していると推定される。また、頭部105の位置が急激に下方向に変化したり、周期的に下方向に変化することがあったときに、搭乗者100aが居眠り運転していると推定される。
【0186】
このように、推定された運転状態に基づいて、警報を出力することで、例えば居眠り運転を抑制できる。
【0187】
実施形態においては、実施形態に係る車載用頭部位置検出装置50により検出した頭部105の位置を用いることで、正確に頭部105の位置が把握できる。これにより、搭乗者100aの運転状態がより正確に把握できる。これにより、より効率的な運転支援が可能になる。
【0188】
実施形態によれば、頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置が提供される。
【0189】
以上、具体例を参照しつつ、本発明のいくつかの実施形態について説明した。しかし、本発明の実施形態は、これらの具体例に限定されるものではない。例えば、車両用頭部位置検出装置に含まれる送受信器、送信部、受信部及び送受信制御部、車載用表示装置に含まれる映像投影部及び投影位置制御部、並びに、運転支援装置に含まれる警報出力装置などの各要素の具体的な構成に関しては、当業者が公知の範囲から適宜選択することにより本発明を同様に実施し、同様の効果を得ることができる限り、本発明の範囲に包含される。
また、各具体例のいずれか2つ以上の要素を技術的に可能な範囲で組み合わせたものも、本発明の要旨を包含する限り本発明の範囲に含まれる。
【0190】
その他、本発明の実施形態として上述した車載用頭部位置検出装置、車載用表示装置及び運転支援装置を基にして、当業者が適宜設計変更して実施し得る全ての車載用頭部位置検出装置、車載用表示装置及び運転支援装置も、本発明の要旨を包含する限り、本発明の範囲に属する。
【0191】
その他、本発明の思想の範疇において、当業者であれば、各種の変更例及び修正例に想到し得るものであり、それら変更例及び修正例についても本発明の範囲に属するものと了解される。
【0192】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0193】
10…車載用表示装置、 20…運転支援装置、 50、51、52…車載用頭部位置検出装置、 100…観視者、 100a…搭乗者、 101…目、 105…頭部、 110…映像生成部、 112…光束、 113…投影位置、 114…投影領域、 115…映像投影部、 120…投影部、 121…光源、 122…テーパライトガイド、 123…光源側レンズ、 124…アパーチャ、 125…出射側レンズ、 126…出射側ミラー、 127…駆動部、 130…映像データ生成部、 180…表示オブジェクト、 181…像、 181p…像形成位置、 250…投影位置制御部、 310…送受信器、 311…送信部、 312…受信部、 320…送受信制御部、 350…送信波、 351、352…第1、第2送信波、 355…頭部検出波、 360…反射波、 361、362…第1、第2反射波、 366…頭部検出反射波、 410…警報出力装置、 710…フロントガラス部、 711…反射部、 720…ダッシュボード、 730…車両、 731…操舵装置、 Av…駆動電圧、 Aw…強度、 HS…ハイ状態、 L…距離、 LS…ロウ状態、 R1〜R5…第1〜第5送受信器、 RCS…受信制御信号、 SCS…送信制御信号、 t…時間、 t1〜t5…第1〜第5時刻、 td1…第1動作期間、 td2…第2動作期間
【特許請求の範囲】
【請求項1】
車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられ、前記頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、前記波が前記頭部によって反射されて得られる波を受信する複数の送受信器と、
前記複数の送受信器に接続された送受信制御部と、
を備え、
前記送受信制御部は、
前記複数の送受信器のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波を前記頭部に向けて送信させる第1送信動作と、
前記第1送信波が前記頭部によって反射されて得られる第1反射波を前記複数の送受信器で受信した結果を入手する第1受信動作と、
前記入手した前記第1反射波を受信した前記結果に基づいて複数の送受信器のうちで前記頭部に最も近い前記送受信器を検出する送受信器検出動作と、
を含む第1動作と、
前記検出された前記頭部に最も近い前記送受信器に、音波及び電磁波の少なくともいずれかの頭部検出波を前記頭部に向けて送信させる頭部検出波送信動作と、
前記頭部検出波が前記頭部によって反射されて得られる頭部検出反射波を前記複数の送受信器で受信した結果を入手する頭部検出反射波受信動作と、
前記入手した前記頭部検出反射波を受信した前記結果に基づいて前記頭部の位置を検出する頭部位置検出動作と、
を含む第2動作と、
を実施することを特徴とする車載用頭部位置検出装置。
【請求項2】
前記第1動作は、
前記第1受信動作の後に、前記複数の送受信器の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波を前記頭部に向けて送信させる第2送信動作と、
前記第2送信波が前記頭部によって反射されて得られる第2反射波を前記複数の送受信器で受信した結果を入手する第2受信動作と、
をさらに含み、
前記送受信器検出動作は、前記入手した前記第2反射波を受信した結果にさらに基づいて実施されることを特徴とする請求項1記載の車載用頭部位置検出装置。
【請求項3】
前記第1送信波及び頭部検出波は、音波であることを特徴とする請求項1または2に記載の車載用頭部位置検出装置。
【請求項4】
前記送受信制御部は、
前記第1送信波の前記送信の後に予め定められた第1期間が経過した後に、前記第1受信動作を実施し、
前記頭部検出波の前記送信の後に予め定められた第2期間が経過した後に、前記頭部検出反射波受信動作を実施することを特徴とする請求項1〜3のいずれか1つに記載の車載用頭部位置検出装置。
【請求項5】
前記送受信制御部は、
前記複数の送受信器の少なくともいずれかと前記頭部との間の距離に関する情報に基づいて、前記第1送信波の強度及び前記頭部検出波の強度の少なくともいずれかを変更することを特徴とする請求項1〜4のいずれか1つに記載の車載用頭部位置検出装置。
【請求項6】
前記送受信制御部は、
前記複数の送受信器の少なくともいずれかと前記頭部との間の距離に関する情報に基づいて、
前記第1送信動作及び前記第1受信動作の時間に関する条件、及び、
前記頭部検出波送信動作及び前記頭部検出反射波受信動作の時間に関する条件の少なくともいずれかを変更することを特徴とする請求項1〜5のいずれか1つに記載の車載用頭部位置検出装置。
【請求項7】
前記送受信制御部は、前記第1動作と前記第2動作とを繰り返し実施し、
前記複数の送受信器の前記少なくともいずれかと前記頭部との間の前記距離に関する前記情報は、
過去に実施された前記第2動作によって検出された前記頭部の前記位置に関する情報に基づいて求められることを特徴とすることを特徴とする請求項5または6に記載の車載用頭部位置検出装置。
【請求項8】
前記送受信制御部は、
前記車両に設けられ前記搭乗者が座るシートの位置に関する情報を入手し、
前記複数の送受信器の前記少なくともいずれかと前記頭部との間の前記距離に関する前記情報は、前記入手した前記シートの位置に関する前記情報に基づいて求められることを特徴とする請求項5〜7のいずれか1つに記載の車載用頭部位置検出装置。
【請求項9】
前記送受信制御部は、前記第1動作と前記第2動作とを繰り返し実施し、
前記第1受信動作において前記送受信制御部は、過去に実施された前記頭部検出波送信動作の前記頭部検出波が前記頭部によって反射されて得られる反射波を前記複数の送受信器で受信した結果を前記第1反射波として入手することを特徴とする請求項1〜8のいずれか1つに記載の車載用頭部位置検出装置。
【請求項10】
請求項1〜9のいずれか1つに記載の車載用頭部位置検出装置と、
前記頭部に映像情報を含む光束を投影する映像投影部と、
前記車載用頭部位置検出装置によって検出された前記頭部の位置に基づいて、前記映像投影部に含まれる光学部品の少なくともいずれかの位置、角度及び配置の少なくともいずれかを制御して、前記光束の投影位置を制御する投影位置制御部と、
を備えたことを特徴とする車載用表示装置。
【請求項11】
請求項1〜9のいずれか1つに記載の車載用頭部位置検出装置と、
前記車載用頭部位置検出装置によって検出された前記頭部の位置に基づいて、前記搭乗者の運転状態を推定し、前記推定された前記運転状態に基づいて、音、光及び震動の少なくともいずれかを含む警報を出力する警報出力装置と、
を備えたことを特徴とする運転支援装置。
【請求項1】
車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられ、前記頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、前記波が前記頭部によって反射されて得られる波を受信する複数の送受信器と、
前記複数の送受信器に接続された送受信制御部と、
を備え、
前記送受信制御部は、
前記複数の送受信器のいずれかに、音波及び電磁波の少なくともいずれかの第1送信波を前記頭部に向けて送信させる第1送信動作と、
前記第1送信波が前記頭部によって反射されて得られる第1反射波を前記複数の送受信器で受信した結果を入手する第1受信動作と、
前記入手した前記第1反射波を受信した前記結果に基づいて複数の送受信器のうちで前記頭部に最も近い前記送受信器を検出する送受信器検出動作と、
を含む第1動作と、
前記検出された前記頭部に最も近い前記送受信器に、音波及び電磁波の少なくともいずれかの頭部検出波を前記頭部に向けて送信させる頭部検出波送信動作と、
前記頭部検出波が前記頭部によって反射されて得られる頭部検出反射波を前記複数の送受信器で受信した結果を入手する頭部検出反射波受信動作と、
前記入手した前記頭部検出反射波を受信した前記結果に基づいて前記頭部の位置を検出する頭部位置検出動作と、
を含む第2動作と、
を実施することを特徴とする車載用頭部位置検出装置。
【請求項2】
前記第1動作は、
前記第1受信動作の後に、前記複数の送受信器の別のいずれかに、音波及び電磁波の少なくともいずれかの第2送信波を前記頭部に向けて送信させる第2送信動作と、
前記第2送信波が前記頭部によって反射されて得られる第2反射波を前記複数の送受信器で受信した結果を入手する第2受信動作と、
をさらに含み、
前記送受信器検出動作は、前記入手した前記第2反射波を受信した結果にさらに基づいて実施されることを特徴とする請求項1記載の車載用頭部位置検出装置。
【請求項3】
前記第1送信波及び頭部検出波は、音波であることを特徴とする請求項1または2に記載の車載用頭部位置検出装置。
【請求項4】
前記送受信制御部は、
前記第1送信波の前記送信の後に予め定められた第1期間が経過した後に、前記第1受信動作を実施し、
前記頭部検出波の前記送信の後に予め定められた第2期間が経過した後に、前記頭部検出反射波受信動作を実施することを特徴とする請求項1〜3のいずれか1つに記載の車載用頭部位置検出装置。
【請求項5】
前記送受信制御部は、
前記複数の送受信器の少なくともいずれかと前記頭部との間の距離に関する情報に基づいて、前記第1送信波の強度及び前記頭部検出波の強度の少なくともいずれかを変更することを特徴とする請求項1〜4のいずれか1つに記載の車載用頭部位置検出装置。
【請求項6】
前記送受信制御部は、
前記複数の送受信器の少なくともいずれかと前記頭部との間の距離に関する情報に基づいて、
前記第1送信動作及び前記第1受信動作の時間に関する条件、及び、
前記頭部検出波送信動作及び前記頭部検出反射波受信動作の時間に関する条件の少なくともいずれかを変更することを特徴とする請求項1〜5のいずれか1つに記載の車載用頭部位置検出装置。
【請求項7】
前記送受信制御部は、前記第1動作と前記第2動作とを繰り返し実施し、
前記複数の送受信器の前記少なくともいずれかと前記頭部との間の前記距離に関する前記情報は、
過去に実施された前記第2動作によって検出された前記頭部の前記位置に関する情報に基づいて求められることを特徴とすることを特徴とする請求項5または6に記載の車載用頭部位置検出装置。
【請求項8】
前記送受信制御部は、
前記車両に設けられ前記搭乗者が座るシートの位置に関する情報を入手し、
前記複数の送受信器の前記少なくともいずれかと前記頭部との間の前記距離に関する前記情報は、前記入手した前記シートの位置に関する前記情報に基づいて求められることを特徴とする請求項5〜7のいずれか1つに記載の車載用頭部位置検出装置。
【請求項9】
前記送受信制御部は、前記第1動作と前記第2動作とを繰り返し実施し、
前記第1受信動作において前記送受信制御部は、過去に実施された前記頭部検出波送信動作の前記頭部検出波が前記頭部によって反射されて得られる反射波を前記複数の送受信器で受信した結果を前記第1反射波として入手することを特徴とする請求項1〜8のいずれか1つに記載の車載用頭部位置検出装置。
【請求項10】
請求項1〜9のいずれか1つに記載の車載用頭部位置検出装置と、
前記頭部に映像情報を含む光束を投影する映像投影部と、
前記車載用頭部位置検出装置によって検出された前記頭部の位置に基づいて、前記映像投影部に含まれる光学部品の少なくともいずれかの位置、角度及び配置の少なくともいずれかを制御して、前記光束の投影位置を制御する投影位置制御部と、
を備えたことを特徴とする車載用表示装置。
【請求項11】
請求項1〜9のいずれか1つに記載の車載用頭部位置検出装置と、
前記車載用頭部位置検出装置によって検出された前記頭部の位置に基づいて、前記搭乗者の運転状態を推定し、前記推定された前記運転状態に基づいて、音、光及び震動の少なくともいずれかを含む警報を出力する警報出力装置と、
を備えたことを特徴とする運転支援装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−173253(P2012−173253A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38310(P2011−38310)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]