
車載端末および車車間通信システム
【課題】車両のユーザが車車間通信システムの通信エリアを認識できるようにするための技術を提供する。
【解決手段】自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末を用いる。
【解決手段】自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末を用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載端末および車車間通信システムに関するものである。
【背景技術】
【0002】
車両の搭載端末間の通信により情報を送受信し、車両や運転者への情報提供を行う車車間通信システムが提案されている。車車間通信システムは、高度道路交通システム(ITS:Intelligent Transport Systems)の安全運転支援システムに分類される通信型のシ
ステムであり、車両同士が位置データや速度情報、車両制御情報等を相互に伝達することにより安全運転を支援する。他の車両から受信したデータの用途としては、衝突回避や制動など車両の運転制御に用いることや、画面表示や音声など、ユーザが理解しやすい形で提供して注意喚起することが考えられる。
【0003】
ユーザへの情報提供の一つの方法として、カーナビゲーション装置(以下、カーナビとも記載する)の画面上に自車両周辺の地図を表示しておき、受信した他の車両の位置データをその地図上に重ね合わせることが考えられる。これにより車車間通信が成立した他の車の位置をユーザに理解しやすく表示できるので、ユーザは運転操作の判断を正確に行うことが可能になる。
特開2005−17200号公報(特許文献1)には、カーナビの画面上に他の車両を表示するための方法が記載されている。
【0004】
なお、2つの車両同士で車車間通信が成立するかどうかは、伝搬損失モデルに基づく計算により推定可能である。例えば多賀モデル(非特許文献1、2)によれば、車車間通信が見通し内か見通し外通信に応じて伝搬損失推定式を使い分けることで、適切な計算をできるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−17200号公報
【非特許文献】
【0006】
【非特許文献1】伊藤義信、多賀登喜雄、他、「車車間通信環境における見通し内伝搬損失推定」、信学技報、AP2006−126、pp.95−100、Jan.2007
【非特許文献2】伊藤義信、多賀登喜雄、他、「車車間通信環境における見通し外伝搬損失推定」、信学総大、B−1−61、p.61、Mar.2008
【発明の概要】
【発明が解決しようとする課題】
【0007】
カーナビの画面上の地図に、単純に他の車両の位置データを重ね合わせて表示した様子を図1に示す。この図の地図上には、自車両1の他に、車車間通信で取得した他の車両2A、2Bの位置データが表示されている。ユーザはこの画面を見ることで、周辺の道路や建物などの地図情報と、自車両の位置および他の車両との位置関係を理解できる。
【0008】
ここで一般に、車車間通信システムにおける通信品質は周囲の環境によって大きく異なる。特に、交差する道路など、自車両からの見通し外にある他の車両との通信がどの程度の距離で成立するかは、建物などの遮蔽構造物の配置に影響される。交差する道路を進む相手車両の位置と速度を取得して出会い頭衝突の防止につなげるために、見通し外通信に
おいては、できるだけ通信距離が長くなることが望ましい。また、見通し外および見通し内のいずれの通信でも、道路の幅が通信品質に影響を与え得る。
【0009】
しかしながら、図1を用いて説明したような方式では、自車両が現在いる地点での車車間通信の通信品質をユーザが把握することができなかった。ある車両が他の車両と通信可能な範囲を通信エリアとすると、通信エリアは画面上のどこにも表示されていない。したがってユーザは、車車間通信の通信品質を把握する手段を持っていなかった。その結果ユーザは、自車両と交差する道路の左側において他の車両2Aを認識できたものの、右側に他の車両が表示されない理由が、実際に他の車両が存在しないためか、それとも通信品質の問題により他の車両を認識できないためか、判断できなかった。その結果、車車間通信で認識できない位置に別の車両が存在することを考えて安心感を持つことができず、運転操作への集中を削がれる可能性があった。
あるいは、画面上に他の車両が一台も表示されていない場合、ユーザは、本当に他の車両が存在しないのか、それとも通信状況が悪くて他の車両を検出できていないのか判断できず、安心感を持って運転操作に集中できない可能性があった。
【0010】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、車両のユーザが車車間通信システムの通信エリアを認識できるようにするための技術を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は以下の構成を採用する。すなわち、自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末である。
【0012】
このような構成を持つ車載端末では、位置データ取得部がGPSなどによって車両の現在位置を取得し、通信エリア取得部が現在位置での車車間通信の通信エリアを取得する。そしてカーナビ画面などの表示部の地図上に、通信部が車車間通信により取得した他の車両の位置と、通信エリアとが合わせて表示される。
このようにカーナビ画面上に通信エリアが表示されれば、ユーザは車車間通信による他の車両の検出の状況を確認しながら運転操作をすることができる。例えば画面上に他の車両が表示されていない場合でも、通信エリアが表示されていれば、通信状況や検出精度を疑わずに安心感を持って運転できる。また、通信エリアが狭く表示されている場合は、エリア外に他の車両がいることを想定して慎重な運転を行うことにより、安全性を高めることができる。
【0013】
上記の車載端末において、前記通信エリア取得部は、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと通信エリアが対応付けられた通信エリアデータベースを参照することにより、通信エリアを取得するように構成することができる。
このような構成を持つ車載端末では、もし通信エリアデータベースに現在位置での通信エリアが記録されていれば、通信エリア取得部は計算を行うまでもなくデータベースを参照することによって通信エリアを取得できるので、処理時間の短縮が可能になる。
【0014】
上記の車載端末において、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと地形データが対応付けられた地形データベースを参照することにより、自車両の周辺の地形データを取得する地形データ取得部をさらに有し、前記通信エリア取得部は、取得した地形データに基づき伝搬損失モデルを用いた計算を行うことにより、通信エリアを取得するように構成することができる。
このような構成を持つ車載端末では、通信エリア取得部は伝搬損失モデルによる計算を行う際に必要な地形データをデータベースを参照することによって取得できるので、処理時間の短縮が可能になる。
なお、地形データとしては少なくとも道路の幅および建物の配置を含むデータを用いることができる。
【0015】
上記の車載端末において、前記地形データ取得部はさらに、電磁波によるセンサも用いて前記地形データを取得するように構成することができる。
このような構成を持つ車載端末では、電磁波によるセンサ、例えばレーダーなどを用いて測定を行って、建物や障害物までの距離などの地形データを取得することができる。これにより、地形データベースのデータを補ってより正確な通信エリアの計算を行うことや、地形が変わって古くなった地形データベースの内容を補うことが可能になる。あるいは、地形データベースに現在位置のデータが無い場合にも、センサの測定結果を利用して通信エリアを計算することが可能になる。
【0016】
上記の車載端末において、前記通信エリア取得部は、自車両と他の車両との通信が初めて成立した地点、および/または、自車両と他の車両との通信が途絶した地点を通信エリアの境界として取得するように構成することができる。
このような構成を持つ車載端末では、実際に通信部が他の車両と車車間通信を成立させたときの情報を用いて通信エリアが取得されるので、実績に基づいて通信エリアを決定することができるようになる。
【0017】
上記の車載端末において、前記通信エリア取得部は、所定の時間間隔で通信エリアの取得を行うように構成することができる。
あるいは、前記通信エリア取得部は、自車両が所定の距離を移動するごとに通信エリアの取得を行うように構成することができる。
このような構成を持つ車載端末では、自車両が走行して場所を移動したり、時間が経過することに伴って、現在位置における通信エリアを取得し、画面上の表示を随時更新することができる。これにより、ユーザに対してリアルタイム性の高いサービスを提供することが可能になる。
【0018】
上記の車載端末において、前記通信部は、路車間通信に用いられる路側通信装置と通信を行い、当該路側通信装置が車両と通信できる範囲である路車間通信エリア、および、当該路車間通信エリアに存在する車両の位置データを取得し、前記表示部はさらに、取得した前記路車間通信エリア、および、前記路車間通信エリアに存在する車両の位置データも表示するように構成することができる。
このような構成を持つ車載端末では、路車間通信エリアとその中の車両とが画面上に重ね合わせて表示される。車車間通信の通信エリアからは死角になる位置に他の車両が存在する場合でも、その車両が路車間通信エリアに含まれていればユーザに位置を提示できるので、運転時の予見可能性を高め、安全性を向上させることができる。
【0019】
本発明はまた、以下の構成を取ることもできる。すなわち、上記の車載端末を搭載した車両と、通信装置および通信エリアデータベースを有する管理装置とを含む車車間通信システムであって、前記車両は、自車両の位置データと、その位置における通信エリアを前記管理装置に送信し、前記管理装置は、前記車両から受信した位置データと通信エリアを対応付けて前記通信エリアデータベースに記録し、車両からの要求に応じて、または、所定のタイミングで、記録したデータを前記通信装置により車両に送信することを特徴とする車車間通信システムである。
【0020】
このような構成を持つ車車間通信システムでは、各車両が取得した通信エリアが、位置
データと対応付けられた上で管理装置のデータベースに記録される。かかるデータベースの運用を継続することにより、様々な地点での通信エリアが蓄積される。また、古い情報は順次新しい情報で更新される。そして、蓄積された通信エリアの情報をオンデマンドで車両に送信したり、放送等で送信したりすることにより、管理装置の管理範囲内に存在する車両の間で通信エリアの情報を共有することができる。
【発明の効果】
【0021】
本発明によれば、車両のユーザが車車間通信システムの通信エリアを認識できるようになる。
【図面の簡単な説明】
【0022】
【図1】従来ユーザに提示される画面を示す図である。
【図2】実施形態1の車載端末の構成を示すブロック図である。
【図3】実施形態1の通信エリアを表示する処理全体を説明するフローチャートである。
【図4】実施形態1でユーザに提示される画面を示す図であり、図4(a)は移動前の画面、図4(b)は移動後の画面を示す。
【図5】実施形態1の通信エリア計算を説明するフローチャートである。
【図6】実施形態2の車載端末の構成を示す図である。
【図7】実施形態2の車車間通信システムの構成を示す図である。
【図8】通信エリアをメッシュにより表現する方法を説明する図である。
【図9】通信エリアをメッシュにより表現する処理を説明するフローチャートである。
【図10】実施形態3でユーザに提示される画面を示す図であり、図10(a)は車車間通信の通信エリアのみを表示した画面、図10(b)は路車間通信の通信エリアも表示した画面を示す。
【図11】伝搬損失モデルを説明する図であり、図11(a)は見通し内通信、図11(b)は見通し外通信を示す。
【発明を実施するための形態】
【0023】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0024】
<実施形態1>
(車車間通信システムの構成)
本実施形態の車車間通信システムは、自車両1と、他の車両2A〜2Cを含む。
【0025】
(車載端末の構成)
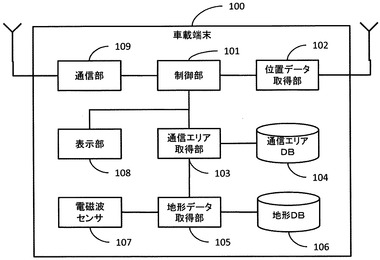
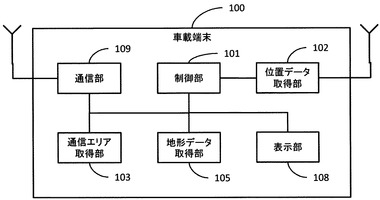
図2は、自車両1に搭載される車載端末100の構成を示すブロック図である。制御部101は、車載端末の各ブロックに指示を与えて処理の内容や順序を制御する装置であり、CPU等を用いることができる。位置データ取得部102は、自車両の現在位置を位置データとして取得する装置であり、例えばGPS衛星からの信号を受信して現在位置を特定する受信機を用いる。またGPSに加えて自律測位機能を持つようにしても良い。
【0026】
通信エリア取得部103は、現在位置における通信エリアを取得する。ここで通信エリアとは、自車両が車車間通信可能な範囲のことを指す。すなわち、以下の説明で、通信エリア内の他の車両とは通信が成立し、通信エリア外の他の車両とは通信が成立しない。通信エリアDB104(通信エリアデータベース)は、位置データと、その位置における通信エリアが対応付けて記録されたデータベースである。通信エリアを表現するために様々な方法を取ることができる。例えば通信エリアの境界線を多数の点と、点同士を結ぶ線で表わしても良い。あるいは地図をメッシュ状に区切り、それぞれのマス目が通信エリアに
含まれるかどうかを記録しても良い。
【0027】
地形データ取得部105は、現在位置における地形データを取得する。地形DB106(地形データベース)は、位置データと、その位置における地形データが対応付けて記録されたデータベースである。地形データとしては伝搬損失モデルにより通信エリアを計算するために必要なデータが記録されており、例えば、道路の幅、建物の配置、交差点までの距離、交差道路先の道路幅や建物配置などである。電磁波センサ107はミリ波レーダー等の装置であり、電磁波等を照射してその方向にある対象物との距離を測定するものである。測定した情報は地形データの一部として用いることができる。
なお、本実施形態での通信エリアDB104および地形DB106は自車両1に搭載されているものとする。これらのデータベースとしては、光ディスク、ハードディスク、半導体メモリなど各種の記憶装置を用いることができる。
表示部108は、ユーザに対して情報を視覚的に提示するための装置であり、例えばカーナビで地図情報を提供するための液晶ディスプレイ等の画面を、そのまま用いることができる。
【0028】
通信部109は、車車間通信を行う装置であり、他の車両と無線通信を成立させてデータの送受信を行うことができる。ここで、通信部が他の車両から送信されたデータを受信できるかどうかは、他の車両側の送信電力と、自車両側の最低受信電力で決定される。受最低信電力は通信機の性能により定まるが、本実施形態では通信機の性能は一定であり、同一の位置における通信エリアは車両を問わず同じであるものとして説明を行う。
ただし実際には通信機によって最低受信電力が異なることもあり得る。その場合であっても通信機の性能を考慮した上で通信エリアを求めることは可能である。例えば、通信エリアDBに、通信機の最低受信電力ごとにある位置での通信エリアを保持するようにすれば、自車両に適した通信エリアを取得することができる。あるいは、通信エリアDBには標準的な通信機を使用する場合のデータを保持しておき、通信エリア取得部が自車両の通信機と標準的な通信機の性能差に応じて適切な係数を用いて通信エリアを求めるようにしても良い。なお、送信電力も送信側でさまざまに設定できるが、車車間通信の使用により規定される場合がある。
【0029】
(処理フロー)
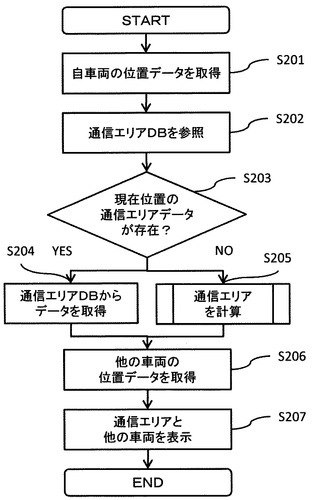
図3は、本実施形態の処理の概略を示すフローチャートである。
ステップS201において、位置データ取得部102は、GPS衛星からの信号を受信して現在位置を取得し、自車両の位置データとする。
ステップS202において、通信エリア取得部103は、自車両の位置データをキーとして通信エリアDB104にアクセスし、現在位置での通信エリアの取得を試みる。
【0030】
ステップS203において、通信エリアが存在するかどうかが判断される。存在する場合はステップS204に進み、該当する通信エリアを取得する。存在しない場合はステップS205に進み、地形データに基づいた計算を行って通信エリアを取得する。この処理については後述する。
ステップS206において、通信部109は、車車間通信によって他の車両の位置データを取得する。
ステップS207において、表示部108は、取得した他の車両の位置データと自車両の通信エリアを、地図上に重ね合わせて表示する。
【0031】
なお、このフロー中の通信エリア取得処理(S204またはS205)、車車間通信(S206)および表示の更新(S207)の実行回数とタイミングは様々に設定することが可能である。例えば車車間通信の実行回数を増やして、より安全性を高めるようにしても良い。
【0032】
上記のステップS205における、地形データを用いて伝搬損失モデルに従った通信エリアの計算について説明する。図5は、通信エリア計算処理の概略を示すフローチャートである。
ステップS301において、地形データ取得部105は、位置データ取得部が取得していた自車両の位置データをキーとして地形DB106にアクセスし、現在位置での地形データの取得を試みる。
ステップS302において、地形データが存在するかどうかが判断される。存在する場合はステップS303に進み、該当する地形データを取得する。存在しない場合はステップS304に進み、電磁波センサ107を用いた測定により地形データを取得する。
ステップS305において、通信エリア取得部103は、取得した地形データを用いて、伝搬損失モデルに従った計算を行う。
【0033】
車車間通信システムにおける通信エリアの計算には、場所の特性に応じた伝搬損失モデルを用いることができる。例えば直線で見通し可能な見通し内通信エリアであれば、自由空間伝搬モデルや2波モデルなどが適用できる。また、交差点を曲がった先の見通し外通信エリアであれば、ナイフエッジモデルなどが適用できる。建物などの遮蔽構造物が多い市街地においては、見通し内と見通し外とで伝搬損失推定式を使い分けることが好ましい。
【0034】
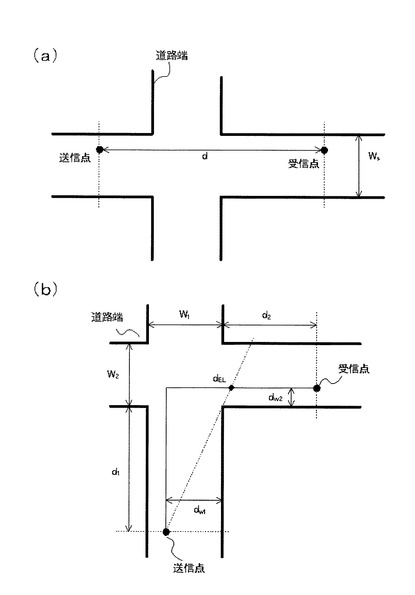
一例として、多賀モデル(非特許文献1、2)の伝搬損失推定式を採用したケースを説明する。このケースでは、図11(a)のような見通し内通信をモデル化するLOS伝搬損失推定式(LOS:Line−of−Site)として、次式を採用する。
【0035】
【数1】

ここで、
d : 送受信点間距離[m]
db :ブレークポイント距離 8×(ht×hr)/λ[m]
f : 搬送波周波数[GHz]
λ : 波長[m]
ht : 送信アンテナ高[m]
hr : 受信アンテナ高[m]
Ws : 道路幅[m]
である。
【0036】
一方、図11(b)のような見通し外通信をモデル化するNLOS伝搬損失推定式として、次式を採用する。
【0037】
【数2】
ここで、
W1: 送信側道路幅[m]
W2: 受信側道路幅[m]
d=d1+dw2+dw1+d2
dEL=d1+dw2+dw1+(dw1・dw2)/d1
d1: 送信点と交差点の距離[m]
d2: 受信点と交差点の距離[m]
dw1: 送信点位置[m]
dw2: 受信点位置[m]
db:ブレークポイント距離 4×(ht×hr)/λ[m]
であり、その他の記号は見通し内通信のモデルの時と同様である。
【0038】
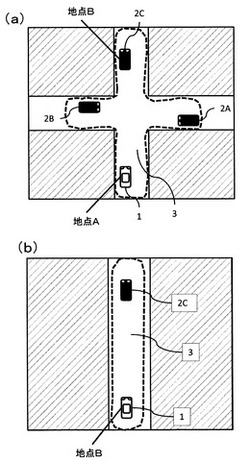
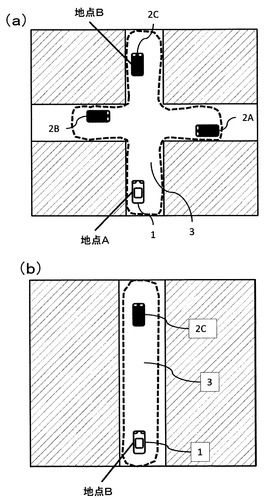
自車両の車載端末が上記のフローを実行した結果、表示部(カーナビ画面)上には図4(a)のような表示がなされる。この図においては、自車両1と他の車両2A〜2Cに加え、自車両がいる地点Aでの通信エリア3が、地図上に重ね合わせて表示されている。これにより、ユーザは車車間通信の通信エリアが地図上のどこまで広がっているかを一見して把握できるので、表示された他の車両の位置について信頼感を持ち、通信エリア外に存在するかもしれない車両については注意を払いつつ、運転操作を行うことができる。また、表示された通信エリアが狭い場合、ユーザは、現在の車車間通信の通信状況が良好ではないと判断するので、他の車両に注意を払いつつ運転操作を行うことになり、安全性を向上させることができる。
【0039】
なおこの画面上には、ユーザにとって関心の高い情報である、自車両の進行方向の地図および同方向にある車両を主に表示している。ただし、実際に表示できる地図の範囲はこれに限らない。例えば、自車両の後方も常に表示するようにしても良いし、他の車両が後方から接近した場合など、交通状況に応じて表示する地図の範囲を変更しても良い。
【0040】
以上、ある一地点で自車両の車載装置が行う処理について述べた。その後自車両が移動すると、車載装置は移動先の地点における通信エリアを取得し直す。通信エリアを取得し直すタイミングは様々に設定できる。例えば所定の時間間隔で上記のフローを繰り返すようにしても良いし、走行計やGPSにより車両が所定の距離を移動したことを検知したら、上記のフローを実行するようにしても良い。
【0041】
図4(a)の自車両1が直進して地点Bに移動し、通信エリアを取得し直した場合のカーナビの画面を図4(b)に示す。画面上の地図は自車両の移動に伴いスクロールしている。その地図上に、地点Bにおいて再度取得された通信エリア3が重ね合わせて表示されている。また、車車間通信によって取得された他の車両2Cの位置も、地図上に表示されている。このように、車載装置が所定のタイミングで通信エリアの取得を繰り返すことにより、自車両が現在いる地点での通信エリアを画面上に表示できる。したがって、ユーザは画面を見ることにより、リアルタイムに通信エリアを知ることが可能になる。
【0042】
なお、上記の処理では、画面上に常にリアルタイムで通信エリアを表示させているが、
ユーザが通信エリアの表示・非表示を選択できるようにしておき、要求のあったときだけ表示するようにしても良い。
【0043】
<実施形態2>
本発明の別の実施形態について説明する。この実施形態では、車両同士の通信に加えて車両と管理センターの管理装置との間で通信が行われる。この通信の結果、車両は通信エリアや地形データを取得し、管理装置には通信エリアの蓄積がなされる。
【0044】
(車載端末の構成)
図6のブロック図に、本実施形態での自車両1に搭載される車載端末100の構成を示す。制御部101は、各ブロックに指示を与えて処理の内容や順序を制御する。位置データ取得部102は、GPS等により自車両の位置データを取得する。
通信エリア取得部103は現在位置での通信エリアを取得するが、本実施形態では通信部を経由して管理装置の通信エリアDBから通信エリアを取得する。また、通信エリアDBに現在位置に対応する通信エリアのエントリーがなければ、伝搬損失モデルによる計算を行って通信エリアを取得する。
【0045】
地形データ取得部105は現在位置での地形データを取得するが、本実施形態では通信部を経由して管理装置の地形DBから地形データを取得する。なお、地形DBに地形データのエントリーが無い場合に電磁波センサで地形データを取得するように車載端末を構成することも可能であるが、ここでは省略し、地形DBには地形データがあるものとする。
【0046】
表示部108は画面上に地図や他の車両や通信エリアを視覚的に提示する。本実施形態の通信部109は、車車間通信に加えて管理装置との通信も行う。車車間通信と同じ通信機を用いても良いし、管理装置との通信に適した通信機、例えばセルラー系データ通信システム(携帯電話、PHS、WiMAX等)、路車間通信システムとの共用、ホットスポット的な通信システム(無線LAN等)を用いても良い。
【0047】
(全体の構成と処理の流れ)
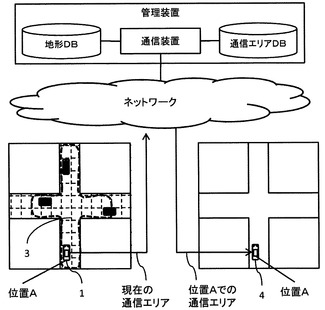
図7を用いて、本実施形態における自車両および管理装置を含むシステムの全体構成と、通信エリア取得および表示に関わる処理の流れを説明する。
【0048】
図中、上部にあるブロックは管理センターの管理装置であり、一定の領域についてデータの蓄積管理を行う。管理装置は、各車両とネットワークを経由して通信を行う通信装置、管理する範囲内について位置データと通信エリアを対応付けた通信エリアDB、および、位置データと地形データを対応付けた地形DBを含んでいる。
【0049】
図の左下部分は、管理装置が管理する範囲(位置A)に入ってきた自車両1の様子を示す模式図である。自車両1の通信エリア取得部103は、位置データ取得部(GPS)102で現在位置を取得すると、まず、管理装置の通信エリアDBに現在位置をキーとした参照を行い、通信エリアの取得を試みる。通信エリアを取得できた場合は、表示部108上に地図情報および車車間通信で得た他の車両の位置データと重ね合わせて表示する。
【0050】
一方通信エリアを取得できなかった場合、地形データ取得部105が、管理装置の地形DBに現在位置をキーとした参照を行い、地形データを取得する。そして通信エリア取得部が地形データを用いて伝搬損失モデルに従った計算を行い、通信エリアを取得する。そして表示部の画面に、地図情報および他の車両の位置データと重ね合わせて表示する。これによりユーザは、現在位置での通信品質を確認することができるので、運転操作の安全性が高まる。
【0051】
ここで、通信エリアを取得できなかった場合には、通信エリアDBに位置Aに対応する通信エリアのエントリーが存在しないと考えられる。そこで、本実施形態では、通信部109から管理装置に向けて、位置Aにおける通信エリア3を送信する。そして管理装置が通信エリアDBにエントリーを追加することにより、データベースが更新される。
【0052】
図の右下部分は、上記のように通信エリアDBにエントリーが追加された後に、別の車両4が同じ位置Aに到達した様子を示している。車両4の車載端末は車両1と同じものである。位置Aに到達した車両4は、GPSで取得した現在位置をキーとして管理装置の通信エリアDBを参照する。すると、車両1が送信した位置Aにおける通信エリアが蓄積されているので、車両4は伝搬損失モデルによる計算をするまでもなく通信エリアを取得でき、処理時間とデータ送受信のトラフィックがともに削減される。
【0053】
上の説明においては、管理装置の通信エリアDBに蓄積された通信エリアの情報は、車両4からのクエリーに応じてオンデマンド形式で送信されていた。しかし、管理装置から車両に対して、より積極的に情報を配信するような構成も考えられる。配信方法としては管理する範囲内へのブロードキャスト型の送信が好ましく、例えば車載ラジオの1チャンネルや、TV放送システムの文字放送などのデータ通信チャンネルが利用できる。
【0054】
上記のように管理装置が収集した通信エリアの情報は、管理センターのシステム運用者が運用管理を行う際にも利用できる。例えば、特殊な地形で車車間通信での通信エリアが狭くなっている場合、それを補うために路車間通信の路側通信装置を追加したり、リピータを追加して車車間通信の通信環境を改善したりできる。また、システム内干渉やシステム間干渉により通信品質が低下するエリアがある場合、その位置を特定し、改善策を講じることができる。
【0055】
<変形例>
本実施形態では、管理装置と車両の通信によりデータ送受信のトラフィックが発生するので、データサイズが大きい場合、通信時間が増加して処理の遅延につながってしまう。そこで本変形例では、車車間通信が成立する範囲を簡易に把握し、その通信エリアの範囲を少ないデータ量で表現する方法を検討する。
【0056】
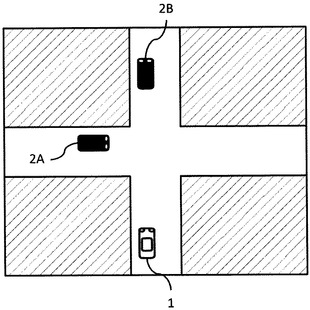
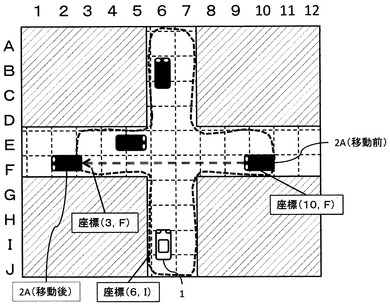
まず、図8のように地図をメッシュ状に区切っておく。一つのメッシュのサイズは例えば5m×5mとする。すると、自車両および他の車両の位置はメッシュの座標で表現可能である。図中、自車両1の座標は(6,I)である。他の車両2Aの移動前の座標は(10,F)であり、移動後の座標は(3,F)である。
【0057】
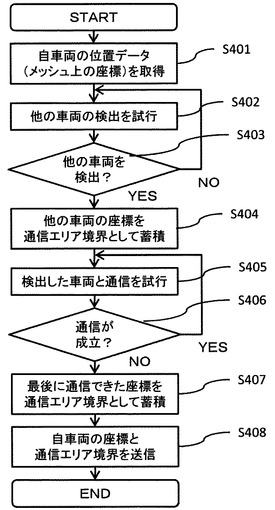
本図の状況下で通信エリアに関する情報を送信する方法を、図9のフローを参照しつつ説明する。このフローでは、自車両1は、交差点での信号待ちなどにより停止しているものとする。
ステップS401において、車載端末の位置データ取得部は、現在の位置データを取得する。そして、取得した位置データをメッシュ上の座標に変換する。これにより自車両の位置データとして座標(6,I)が得られる。
ステップS402において、車載端末の通信部は、他の車両の検出を試行する。ステップS403において、他の車両を検出できたかどうかが判断される。検出できなかった場合はステップS402に戻り、定期的に検出動作を繰り返す。検出できた場合はステップS404に進む。
【0058】
ステップS404において、車載端末の通信エリア取得部は、検出した他の車両2Aから受信したデータを解析し、他の車両の位置データとして座標(10,F)を取得し、不図示のメモリに蓄積する。
ステップS405において、車載端末の通信部は、検出済みの他の車両との通信を試行する。ステップS406において、通信が成立したがどうかが判断される。検出できた場合は、受信データを解析して位置データをメモリに蓄積した上で、ステップS405に戻り、定期的に通信状況の確認を繰り返す。他の車両を検出できず、通信が途絶した場合はステップS407に進む。
【0059】
ステップS407において、車載端末の通信エリア取得部は、最後に通信が成立した座標をメモリから取得する。ここでは座標(3,F)が得られる。
ステップS408において、車載端末の通信部は、自車両の座標および、他の車両2Aと通信が成立する境界の座標を管理装置に送信する。
ここで、座標(10,F)と(3,F)の間では他の車両2Aと通信が成立しているので、これら2つの座標を含む道路上の領域は、自車両からの通信エリア内であると言える。そこで管理装置は、通信エリアDBに、位置データの座標(6,I)に対応する通信エリアとしてこの領域を蓄積する。
【0060】
かかる方法で車両が通信エリアを取得した場合、メッシュのサイズにもよるものの、自車両の位置データと通信エリアの境界を簡易な方法で取得でき、かつデータ量も抑制することができるので、処理時間とデータ送受信のトラフィックを減少させられる。
なお、このような方法でデータ量を削減することは、管理装置と通信する場合のみならず、車両内部に通信エリアDBを持つ場合であっても、処理における制御部等の処理の負荷を軽くし、かつデータベースの容量を減らす効果があるので有効である。
【0061】
変形例による通信エリアの取得方法は、地形DBの地形データに必ずしも依存しない。言い換えると、建物の建築や撤去、道路工事による道路幅や交差点の状況の変化などがあって通信エリアが変化した場合、より実態に沿った通信エリア情報が得られる。そこで、通信エリアDBに保存している通信エリアの情報を、取得した通信エリアの情報により随時更新すれば、通信エリアDBの内容を正確に保ち、別の車両に配信することができる。
【0062】
なお、以上の記載では自車両が停止しているものとして説明したが、自車両が移動中であっても上記の方法を応用することが可能である。自車両が移動している場合、他の車両と通信が成立した時点での自車両の位置データ(メッシュ上の座標)と他の車両の位置データを対応付けて管理装置に送信する。管理装置は、受信したデータを利用して通信エリアDB内の通信エリアの境界情報を更新する。また、通信が途絶した場合についても同様にして通信エリアの境界情報を更新できる。
【0063】
<実施形態3>
本発明の別の実施形態について説明する。この実施形態では、車車間通信の通信エリアに加えて、路車間通信の通信エリアと、路車間通信の路側通信装置が保持する情報がユーザに提示される。
【0064】
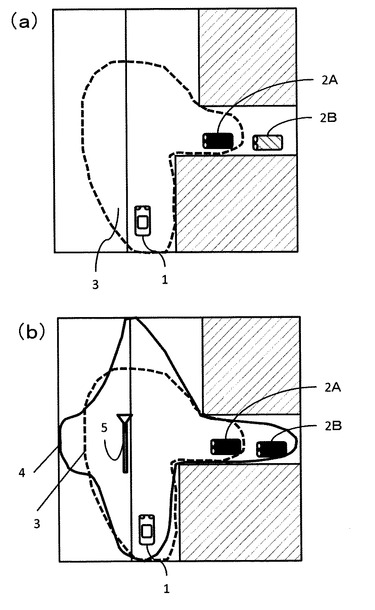
図10(a)は、上述した各実施形態の車車間通信システムにおける構成要素を示す図であり、ユーザに提示される画面にも対応している。地図上には、車載端末が取得した現在の通信エリア3と、車車間通信により取得した他の車両2Aの位置が重ね合わせて表示されている。しかし、他の車両2Bは車車間通信の通信エリアにまだ進入していないため、自車両から検出することができず、実際のカーナビ画面上には表示されていない。なお、道路の進行方向左側には建物がないため、通信エリア3は左側に広がっているものとする。
【0065】
そこで本実施形態においては、車車間通信に加え、路側通信装置と路車間通信を行って情報を取得する。その情報には、路車間通信の通信エリアと、路側通信装置が把握してい
る車両の位置データが含まれているものとする。路車間通信を行うタイミングは自由に設定できるが、例えば、実施形態1で図3を用いて説明した処理フローにおいて、さらに路車間通信のステップを追加するようにしても良い。
【0066】
図10(b)は、車車間通信に加えて路車間通信を行い、その結果をカーナビの画面上に表示した様子を示している。図中、路側通信装置5が車両と通信可能な範囲は、路車間通信の通信エリア4として提示されている。また、路車間通信の通信エリア内に存在する他の車両の位置データも画面上に表示される。特に、他の車両2Bは、車車間通信の通信エリア3に入っていないものの、路車間通信の通信エリア4には含まれるため、表示できるようになった。
【0067】
なお、表示される情報が車車間通信と路車間通信のいずれで得られたものであるかは、ユーザの運転操作に影響を与える問題ではない。そこで、カーナビ画面において車車間通信と路車間通信の通信エリアを融合させ、一つの通信エリアとして表示することもできる。その上に、車車間通信および路車間通信で取得した他の車両の位置データを区別することなく重ね合わせて表示することが好ましい。
【0068】
このように、路車間通信の通信エリアと路側通信装置が保持する車両の位置データを画面上に表示することにより、ユーザにとっての死角が少なくなり、安全性の向上という効果が得られる。また、他の車両が車車間通信の車載端末を搭載していないと、車両同士の通信は成立しない。しかし、路側通信装置が、それらの車両との路車間通信やセンサを用いた測定によって位置データを取得していた場合、車車間通信では得られない情報をユーザに提示することが可能になる。
【符号の説明】
【0069】
100:車載端末
102:位置データ取得部
103:通信エリア取得部
108:表示部
109:通信部
【技術分野】
【0001】
本発明は、車載端末および車車間通信システムに関するものである。
【背景技術】
【0002】
車両の搭載端末間の通信により情報を送受信し、車両や運転者への情報提供を行う車車間通信システムが提案されている。車車間通信システムは、高度道路交通システム(ITS:Intelligent Transport Systems)の安全運転支援システムに分類される通信型のシ
ステムであり、車両同士が位置データや速度情報、車両制御情報等を相互に伝達することにより安全運転を支援する。他の車両から受信したデータの用途としては、衝突回避や制動など車両の運転制御に用いることや、画面表示や音声など、ユーザが理解しやすい形で提供して注意喚起することが考えられる。
【0003】
ユーザへの情報提供の一つの方法として、カーナビゲーション装置(以下、カーナビとも記載する)の画面上に自車両周辺の地図を表示しておき、受信した他の車両の位置データをその地図上に重ね合わせることが考えられる。これにより車車間通信が成立した他の車の位置をユーザに理解しやすく表示できるので、ユーザは運転操作の判断を正確に行うことが可能になる。
特開2005−17200号公報(特許文献1)には、カーナビの画面上に他の車両を表示するための方法が記載されている。
【0004】
なお、2つの車両同士で車車間通信が成立するかどうかは、伝搬損失モデルに基づく計算により推定可能である。例えば多賀モデル(非特許文献1、2)によれば、車車間通信が見通し内か見通し外通信に応じて伝搬損失推定式を使い分けることで、適切な計算をできるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−17200号公報
【非特許文献】
【0006】
【非特許文献1】伊藤義信、多賀登喜雄、他、「車車間通信環境における見通し内伝搬損失推定」、信学技報、AP2006−126、pp.95−100、Jan.2007
【非特許文献2】伊藤義信、多賀登喜雄、他、「車車間通信環境における見通し外伝搬損失推定」、信学総大、B−1−61、p.61、Mar.2008
【発明の概要】
【発明が解決しようとする課題】
【0007】
カーナビの画面上の地図に、単純に他の車両の位置データを重ね合わせて表示した様子を図1に示す。この図の地図上には、自車両1の他に、車車間通信で取得した他の車両2A、2Bの位置データが表示されている。ユーザはこの画面を見ることで、周辺の道路や建物などの地図情報と、自車両の位置および他の車両との位置関係を理解できる。
【0008】
ここで一般に、車車間通信システムにおける通信品質は周囲の環境によって大きく異なる。特に、交差する道路など、自車両からの見通し外にある他の車両との通信がどの程度の距離で成立するかは、建物などの遮蔽構造物の配置に影響される。交差する道路を進む相手車両の位置と速度を取得して出会い頭衝突の防止につなげるために、見通し外通信に
おいては、できるだけ通信距離が長くなることが望ましい。また、見通し外および見通し内のいずれの通信でも、道路の幅が通信品質に影響を与え得る。
【0009】
しかしながら、図1を用いて説明したような方式では、自車両が現在いる地点での車車間通信の通信品質をユーザが把握することができなかった。ある車両が他の車両と通信可能な範囲を通信エリアとすると、通信エリアは画面上のどこにも表示されていない。したがってユーザは、車車間通信の通信品質を把握する手段を持っていなかった。その結果ユーザは、自車両と交差する道路の左側において他の車両2Aを認識できたものの、右側に他の車両が表示されない理由が、実際に他の車両が存在しないためか、それとも通信品質の問題により他の車両を認識できないためか、判断できなかった。その結果、車車間通信で認識できない位置に別の車両が存在することを考えて安心感を持つことができず、運転操作への集中を削がれる可能性があった。
あるいは、画面上に他の車両が一台も表示されていない場合、ユーザは、本当に他の車両が存在しないのか、それとも通信状況が悪くて他の車両を検出できていないのか判断できず、安心感を持って運転操作に集中できない可能性があった。
【0010】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、車両のユーザが車車間通信システムの通信エリアを認識できるようにするための技術を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するために、本発明は以下の構成を採用する。すなわち、自車両の位置データを取得する位置データ取得部と、他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部とを有する車載端末である。
【0012】
このような構成を持つ車載端末では、位置データ取得部がGPSなどによって車両の現在位置を取得し、通信エリア取得部が現在位置での車車間通信の通信エリアを取得する。そしてカーナビ画面などの表示部の地図上に、通信部が車車間通信により取得した他の車両の位置と、通信エリアとが合わせて表示される。
このようにカーナビ画面上に通信エリアが表示されれば、ユーザは車車間通信による他の車両の検出の状況を確認しながら運転操作をすることができる。例えば画面上に他の車両が表示されていない場合でも、通信エリアが表示されていれば、通信状況や検出精度を疑わずに安心感を持って運転できる。また、通信エリアが狭く表示されている場合は、エリア外に他の車両がいることを想定して慎重な運転を行うことにより、安全性を高めることができる。
【0013】
上記の車載端末において、前記通信エリア取得部は、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと通信エリアが対応付けられた通信エリアデータベースを参照することにより、通信エリアを取得するように構成することができる。
このような構成を持つ車載端末では、もし通信エリアデータベースに現在位置での通信エリアが記録されていれば、通信エリア取得部は計算を行うまでもなくデータベースを参照することによって通信エリアを取得できるので、処理時間の短縮が可能になる。
【0014】
上記の車載端末において、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと地形データが対応付けられた地形データベースを参照することにより、自車両の周辺の地形データを取得する地形データ取得部をさらに有し、前記通信エリア取得部は、取得した地形データに基づき伝搬損失モデルを用いた計算を行うことにより、通信エリアを取得するように構成することができる。
このような構成を持つ車載端末では、通信エリア取得部は伝搬損失モデルによる計算を行う際に必要な地形データをデータベースを参照することによって取得できるので、処理時間の短縮が可能になる。
なお、地形データとしては少なくとも道路の幅および建物の配置を含むデータを用いることができる。
【0015】
上記の車載端末において、前記地形データ取得部はさらに、電磁波によるセンサも用いて前記地形データを取得するように構成することができる。
このような構成を持つ車載端末では、電磁波によるセンサ、例えばレーダーなどを用いて測定を行って、建物や障害物までの距離などの地形データを取得することができる。これにより、地形データベースのデータを補ってより正確な通信エリアの計算を行うことや、地形が変わって古くなった地形データベースの内容を補うことが可能になる。あるいは、地形データベースに現在位置のデータが無い場合にも、センサの測定結果を利用して通信エリアを計算することが可能になる。
【0016】
上記の車載端末において、前記通信エリア取得部は、自車両と他の車両との通信が初めて成立した地点、および/または、自車両と他の車両との通信が途絶した地点を通信エリアの境界として取得するように構成することができる。
このような構成を持つ車載端末では、実際に通信部が他の車両と車車間通信を成立させたときの情報を用いて通信エリアが取得されるので、実績に基づいて通信エリアを決定することができるようになる。
【0017】
上記の車載端末において、前記通信エリア取得部は、所定の時間間隔で通信エリアの取得を行うように構成することができる。
あるいは、前記通信エリア取得部は、自車両が所定の距離を移動するごとに通信エリアの取得を行うように構成することができる。
このような構成を持つ車載端末では、自車両が走行して場所を移動したり、時間が経過することに伴って、現在位置における通信エリアを取得し、画面上の表示を随時更新することができる。これにより、ユーザに対してリアルタイム性の高いサービスを提供することが可能になる。
【0018】
上記の車載端末において、前記通信部は、路車間通信に用いられる路側通信装置と通信を行い、当該路側通信装置が車両と通信できる範囲である路車間通信エリア、および、当該路車間通信エリアに存在する車両の位置データを取得し、前記表示部はさらに、取得した前記路車間通信エリア、および、前記路車間通信エリアに存在する車両の位置データも表示するように構成することができる。
このような構成を持つ車載端末では、路車間通信エリアとその中の車両とが画面上に重ね合わせて表示される。車車間通信の通信エリアからは死角になる位置に他の車両が存在する場合でも、その車両が路車間通信エリアに含まれていればユーザに位置を提示できるので、運転時の予見可能性を高め、安全性を向上させることができる。
【0019】
本発明はまた、以下の構成を取ることもできる。すなわち、上記の車載端末を搭載した車両と、通信装置および通信エリアデータベースを有する管理装置とを含む車車間通信システムであって、前記車両は、自車両の位置データと、その位置における通信エリアを前記管理装置に送信し、前記管理装置は、前記車両から受信した位置データと通信エリアを対応付けて前記通信エリアデータベースに記録し、車両からの要求に応じて、または、所定のタイミングで、記録したデータを前記通信装置により車両に送信することを特徴とする車車間通信システムである。
【0020】
このような構成を持つ車車間通信システムでは、各車両が取得した通信エリアが、位置
データと対応付けられた上で管理装置のデータベースに記録される。かかるデータベースの運用を継続することにより、様々な地点での通信エリアが蓄積される。また、古い情報は順次新しい情報で更新される。そして、蓄積された通信エリアの情報をオンデマンドで車両に送信したり、放送等で送信したりすることにより、管理装置の管理範囲内に存在する車両の間で通信エリアの情報を共有することができる。
【発明の効果】
【0021】
本発明によれば、車両のユーザが車車間通信システムの通信エリアを認識できるようになる。
【図面の簡単な説明】
【0022】
【図1】従来ユーザに提示される画面を示す図である。
【図2】実施形態1の車載端末の構成を示すブロック図である。
【図3】実施形態1の通信エリアを表示する処理全体を説明するフローチャートである。
【図4】実施形態1でユーザに提示される画面を示す図であり、図4(a)は移動前の画面、図4(b)は移動後の画面を示す。
【図5】実施形態1の通信エリア計算を説明するフローチャートである。
【図6】実施形態2の車載端末の構成を示す図である。
【図7】実施形態2の車車間通信システムの構成を示す図である。
【図8】通信エリアをメッシュにより表現する方法を説明する図である。
【図9】通信エリアをメッシュにより表現する処理を説明するフローチャートである。
【図10】実施形態3でユーザに提示される画面を示す図であり、図10(a)は車車間通信の通信エリアのみを表示した画面、図10(b)は路車間通信の通信エリアも表示した画面を示す。
【図11】伝搬損失モデルを説明する図であり、図11(a)は見通し内通信、図11(b)は見通し外通信を示す。
【発明を実施するための形態】
【0023】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0024】
<実施形態1>
(車車間通信システムの構成)
本実施形態の車車間通信システムは、自車両1と、他の車両2A〜2Cを含む。
【0025】
(車載端末の構成)
図2は、自車両1に搭載される車載端末100の構成を示すブロック図である。制御部101は、車載端末の各ブロックに指示を与えて処理の内容や順序を制御する装置であり、CPU等を用いることができる。位置データ取得部102は、自車両の現在位置を位置データとして取得する装置であり、例えばGPS衛星からの信号を受信して現在位置を特定する受信機を用いる。またGPSに加えて自律測位機能を持つようにしても良い。
【0026】
通信エリア取得部103は、現在位置における通信エリアを取得する。ここで通信エリアとは、自車両が車車間通信可能な範囲のことを指す。すなわち、以下の説明で、通信エリア内の他の車両とは通信が成立し、通信エリア外の他の車両とは通信が成立しない。通信エリアDB104(通信エリアデータベース)は、位置データと、その位置における通信エリアが対応付けて記録されたデータベースである。通信エリアを表現するために様々な方法を取ることができる。例えば通信エリアの境界線を多数の点と、点同士を結ぶ線で表わしても良い。あるいは地図をメッシュ状に区切り、それぞれのマス目が通信エリアに
含まれるかどうかを記録しても良い。
【0027】
地形データ取得部105は、現在位置における地形データを取得する。地形DB106(地形データベース)は、位置データと、その位置における地形データが対応付けて記録されたデータベースである。地形データとしては伝搬損失モデルにより通信エリアを計算するために必要なデータが記録されており、例えば、道路の幅、建物の配置、交差点までの距離、交差道路先の道路幅や建物配置などである。電磁波センサ107はミリ波レーダー等の装置であり、電磁波等を照射してその方向にある対象物との距離を測定するものである。測定した情報は地形データの一部として用いることができる。
なお、本実施形態での通信エリアDB104および地形DB106は自車両1に搭載されているものとする。これらのデータベースとしては、光ディスク、ハードディスク、半導体メモリなど各種の記憶装置を用いることができる。
表示部108は、ユーザに対して情報を視覚的に提示するための装置であり、例えばカーナビで地図情報を提供するための液晶ディスプレイ等の画面を、そのまま用いることができる。
【0028】
通信部109は、車車間通信を行う装置であり、他の車両と無線通信を成立させてデータの送受信を行うことができる。ここで、通信部が他の車両から送信されたデータを受信できるかどうかは、他の車両側の送信電力と、自車両側の最低受信電力で決定される。受最低信電力は通信機の性能により定まるが、本実施形態では通信機の性能は一定であり、同一の位置における通信エリアは車両を問わず同じであるものとして説明を行う。
ただし実際には通信機によって最低受信電力が異なることもあり得る。その場合であっても通信機の性能を考慮した上で通信エリアを求めることは可能である。例えば、通信エリアDBに、通信機の最低受信電力ごとにある位置での通信エリアを保持するようにすれば、自車両に適した通信エリアを取得することができる。あるいは、通信エリアDBには標準的な通信機を使用する場合のデータを保持しておき、通信エリア取得部が自車両の通信機と標準的な通信機の性能差に応じて適切な係数を用いて通信エリアを求めるようにしても良い。なお、送信電力も送信側でさまざまに設定できるが、車車間通信の使用により規定される場合がある。
【0029】
(処理フロー)
図3は、本実施形態の処理の概略を示すフローチャートである。
ステップS201において、位置データ取得部102は、GPS衛星からの信号を受信して現在位置を取得し、自車両の位置データとする。
ステップS202において、通信エリア取得部103は、自車両の位置データをキーとして通信エリアDB104にアクセスし、現在位置での通信エリアの取得を試みる。
【0030】
ステップS203において、通信エリアが存在するかどうかが判断される。存在する場合はステップS204に進み、該当する通信エリアを取得する。存在しない場合はステップS205に進み、地形データに基づいた計算を行って通信エリアを取得する。この処理については後述する。
ステップS206において、通信部109は、車車間通信によって他の車両の位置データを取得する。
ステップS207において、表示部108は、取得した他の車両の位置データと自車両の通信エリアを、地図上に重ね合わせて表示する。
【0031】
なお、このフロー中の通信エリア取得処理(S204またはS205)、車車間通信(S206)および表示の更新(S207)の実行回数とタイミングは様々に設定することが可能である。例えば車車間通信の実行回数を増やして、より安全性を高めるようにしても良い。
【0032】
上記のステップS205における、地形データを用いて伝搬損失モデルに従った通信エリアの計算について説明する。図5は、通信エリア計算処理の概略を示すフローチャートである。
ステップS301において、地形データ取得部105は、位置データ取得部が取得していた自車両の位置データをキーとして地形DB106にアクセスし、現在位置での地形データの取得を試みる。
ステップS302において、地形データが存在するかどうかが判断される。存在する場合はステップS303に進み、該当する地形データを取得する。存在しない場合はステップS304に進み、電磁波センサ107を用いた測定により地形データを取得する。
ステップS305において、通信エリア取得部103は、取得した地形データを用いて、伝搬損失モデルに従った計算を行う。
【0033】
車車間通信システムにおける通信エリアの計算には、場所の特性に応じた伝搬損失モデルを用いることができる。例えば直線で見通し可能な見通し内通信エリアであれば、自由空間伝搬モデルや2波モデルなどが適用できる。また、交差点を曲がった先の見通し外通信エリアであれば、ナイフエッジモデルなどが適用できる。建物などの遮蔽構造物が多い市街地においては、見通し内と見通し外とで伝搬損失推定式を使い分けることが好ましい。
【0034】
一例として、多賀モデル(非特許文献1、2)の伝搬損失推定式を採用したケースを説明する。このケースでは、図11(a)のような見通し内通信をモデル化するLOS伝搬損失推定式(LOS:Line−of−Site)として、次式を採用する。
【0035】
【数1】
ここで、
d : 送受信点間距離[m]
db :ブレークポイント距離 8×(ht×hr)/λ[m]
f : 搬送波周波数[GHz]
λ : 波長[m]
ht : 送信アンテナ高[m]
hr : 受信アンテナ高[m]
Ws : 道路幅[m]
である。
【0036】
一方、図11(b)のような見通し外通信をモデル化するNLOS伝搬損失推定式として、次式を採用する。
【0037】
【数2】
ここで、
W1: 送信側道路幅[m]
W2: 受信側道路幅[m]
d=d1+dw2+dw1+d2
dEL=d1+dw2+dw1+(dw1・dw2)/d1
d1: 送信点と交差点の距離[m]
d2: 受信点と交差点の距離[m]
dw1: 送信点位置[m]
dw2: 受信点位置[m]
db:ブレークポイント距離 4×(ht×hr)/λ[m]
であり、その他の記号は見通し内通信のモデルの時と同様である。
【0038】
自車両の車載端末が上記のフローを実行した結果、表示部(カーナビ画面)上には図4(a)のような表示がなされる。この図においては、自車両1と他の車両2A〜2Cに加え、自車両がいる地点Aでの通信エリア3が、地図上に重ね合わせて表示されている。これにより、ユーザは車車間通信の通信エリアが地図上のどこまで広がっているかを一見して把握できるので、表示された他の車両の位置について信頼感を持ち、通信エリア外に存在するかもしれない車両については注意を払いつつ、運転操作を行うことができる。また、表示された通信エリアが狭い場合、ユーザは、現在の車車間通信の通信状況が良好ではないと判断するので、他の車両に注意を払いつつ運転操作を行うことになり、安全性を向上させることができる。
【0039】
なおこの画面上には、ユーザにとって関心の高い情報である、自車両の進行方向の地図および同方向にある車両を主に表示している。ただし、実際に表示できる地図の範囲はこれに限らない。例えば、自車両の後方も常に表示するようにしても良いし、他の車両が後方から接近した場合など、交通状況に応じて表示する地図の範囲を変更しても良い。
【0040】
以上、ある一地点で自車両の車載装置が行う処理について述べた。その後自車両が移動すると、車載装置は移動先の地点における通信エリアを取得し直す。通信エリアを取得し直すタイミングは様々に設定できる。例えば所定の時間間隔で上記のフローを繰り返すようにしても良いし、走行計やGPSにより車両が所定の距離を移動したことを検知したら、上記のフローを実行するようにしても良い。
【0041】
図4(a)の自車両1が直進して地点Bに移動し、通信エリアを取得し直した場合のカーナビの画面を図4(b)に示す。画面上の地図は自車両の移動に伴いスクロールしている。その地図上に、地点Bにおいて再度取得された通信エリア3が重ね合わせて表示されている。また、車車間通信によって取得された他の車両2Cの位置も、地図上に表示されている。このように、車載装置が所定のタイミングで通信エリアの取得を繰り返すことにより、自車両が現在いる地点での通信エリアを画面上に表示できる。したがって、ユーザは画面を見ることにより、リアルタイムに通信エリアを知ることが可能になる。
【0042】
なお、上記の処理では、画面上に常にリアルタイムで通信エリアを表示させているが、
ユーザが通信エリアの表示・非表示を選択できるようにしておき、要求のあったときだけ表示するようにしても良い。
【0043】
<実施形態2>
本発明の別の実施形態について説明する。この実施形態では、車両同士の通信に加えて車両と管理センターの管理装置との間で通信が行われる。この通信の結果、車両は通信エリアや地形データを取得し、管理装置には通信エリアの蓄積がなされる。
【0044】
(車載端末の構成)
図6のブロック図に、本実施形態での自車両1に搭載される車載端末100の構成を示す。制御部101は、各ブロックに指示を与えて処理の内容や順序を制御する。位置データ取得部102は、GPS等により自車両の位置データを取得する。
通信エリア取得部103は現在位置での通信エリアを取得するが、本実施形態では通信部を経由して管理装置の通信エリアDBから通信エリアを取得する。また、通信エリアDBに現在位置に対応する通信エリアのエントリーがなければ、伝搬損失モデルによる計算を行って通信エリアを取得する。
【0045】
地形データ取得部105は現在位置での地形データを取得するが、本実施形態では通信部を経由して管理装置の地形DBから地形データを取得する。なお、地形DBに地形データのエントリーが無い場合に電磁波センサで地形データを取得するように車載端末を構成することも可能であるが、ここでは省略し、地形DBには地形データがあるものとする。
【0046】
表示部108は画面上に地図や他の車両や通信エリアを視覚的に提示する。本実施形態の通信部109は、車車間通信に加えて管理装置との通信も行う。車車間通信と同じ通信機を用いても良いし、管理装置との通信に適した通信機、例えばセルラー系データ通信システム(携帯電話、PHS、WiMAX等)、路車間通信システムとの共用、ホットスポット的な通信システム(無線LAN等)を用いても良い。
【0047】
(全体の構成と処理の流れ)
図7を用いて、本実施形態における自車両および管理装置を含むシステムの全体構成と、通信エリア取得および表示に関わる処理の流れを説明する。
【0048】
図中、上部にあるブロックは管理センターの管理装置であり、一定の領域についてデータの蓄積管理を行う。管理装置は、各車両とネットワークを経由して通信を行う通信装置、管理する範囲内について位置データと通信エリアを対応付けた通信エリアDB、および、位置データと地形データを対応付けた地形DBを含んでいる。
【0049】
図の左下部分は、管理装置が管理する範囲(位置A)に入ってきた自車両1の様子を示す模式図である。自車両1の通信エリア取得部103は、位置データ取得部(GPS)102で現在位置を取得すると、まず、管理装置の通信エリアDBに現在位置をキーとした参照を行い、通信エリアの取得を試みる。通信エリアを取得できた場合は、表示部108上に地図情報および車車間通信で得た他の車両の位置データと重ね合わせて表示する。
【0050】
一方通信エリアを取得できなかった場合、地形データ取得部105が、管理装置の地形DBに現在位置をキーとした参照を行い、地形データを取得する。そして通信エリア取得部が地形データを用いて伝搬損失モデルに従った計算を行い、通信エリアを取得する。そして表示部の画面に、地図情報および他の車両の位置データと重ね合わせて表示する。これによりユーザは、現在位置での通信品質を確認することができるので、運転操作の安全性が高まる。
【0051】
ここで、通信エリアを取得できなかった場合には、通信エリアDBに位置Aに対応する通信エリアのエントリーが存在しないと考えられる。そこで、本実施形態では、通信部109から管理装置に向けて、位置Aにおける通信エリア3を送信する。そして管理装置が通信エリアDBにエントリーを追加することにより、データベースが更新される。
【0052】
図の右下部分は、上記のように通信エリアDBにエントリーが追加された後に、別の車両4が同じ位置Aに到達した様子を示している。車両4の車載端末は車両1と同じものである。位置Aに到達した車両4は、GPSで取得した現在位置をキーとして管理装置の通信エリアDBを参照する。すると、車両1が送信した位置Aにおける通信エリアが蓄積されているので、車両4は伝搬損失モデルによる計算をするまでもなく通信エリアを取得でき、処理時間とデータ送受信のトラフィックがともに削減される。
【0053】
上の説明においては、管理装置の通信エリアDBに蓄積された通信エリアの情報は、車両4からのクエリーに応じてオンデマンド形式で送信されていた。しかし、管理装置から車両に対して、より積極的に情報を配信するような構成も考えられる。配信方法としては管理する範囲内へのブロードキャスト型の送信が好ましく、例えば車載ラジオの1チャンネルや、TV放送システムの文字放送などのデータ通信チャンネルが利用できる。
【0054】
上記のように管理装置が収集した通信エリアの情報は、管理センターのシステム運用者が運用管理を行う際にも利用できる。例えば、特殊な地形で車車間通信での通信エリアが狭くなっている場合、それを補うために路車間通信の路側通信装置を追加したり、リピータを追加して車車間通信の通信環境を改善したりできる。また、システム内干渉やシステム間干渉により通信品質が低下するエリアがある場合、その位置を特定し、改善策を講じることができる。
【0055】
<変形例>
本実施形態では、管理装置と車両の通信によりデータ送受信のトラフィックが発生するので、データサイズが大きい場合、通信時間が増加して処理の遅延につながってしまう。そこで本変形例では、車車間通信が成立する範囲を簡易に把握し、その通信エリアの範囲を少ないデータ量で表現する方法を検討する。
【0056】
まず、図8のように地図をメッシュ状に区切っておく。一つのメッシュのサイズは例えば5m×5mとする。すると、自車両および他の車両の位置はメッシュの座標で表現可能である。図中、自車両1の座標は(6,I)である。他の車両2Aの移動前の座標は(10,F)であり、移動後の座標は(3,F)である。
【0057】
本図の状況下で通信エリアに関する情報を送信する方法を、図9のフローを参照しつつ説明する。このフローでは、自車両1は、交差点での信号待ちなどにより停止しているものとする。
ステップS401において、車載端末の位置データ取得部は、現在の位置データを取得する。そして、取得した位置データをメッシュ上の座標に変換する。これにより自車両の位置データとして座標(6,I)が得られる。
ステップS402において、車載端末の通信部は、他の車両の検出を試行する。ステップS403において、他の車両を検出できたかどうかが判断される。検出できなかった場合はステップS402に戻り、定期的に検出動作を繰り返す。検出できた場合はステップS404に進む。
【0058】
ステップS404において、車載端末の通信エリア取得部は、検出した他の車両2Aから受信したデータを解析し、他の車両の位置データとして座標(10,F)を取得し、不図示のメモリに蓄積する。
ステップS405において、車載端末の通信部は、検出済みの他の車両との通信を試行する。ステップS406において、通信が成立したがどうかが判断される。検出できた場合は、受信データを解析して位置データをメモリに蓄積した上で、ステップS405に戻り、定期的に通信状況の確認を繰り返す。他の車両を検出できず、通信が途絶した場合はステップS407に進む。
【0059】
ステップS407において、車載端末の通信エリア取得部は、最後に通信が成立した座標をメモリから取得する。ここでは座標(3,F)が得られる。
ステップS408において、車載端末の通信部は、自車両の座標および、他の車両2Aと通信が成立する境界の座標を管理装置に送信する。
ここで、座標(10,F)と(3,F)の間では他の車両2Aと通信が成立しているので、これら2つの座標を含む道路上の領域は、自車両からの通信エリア内であると言える。そこで管理装置は、通信エリアDBに、位置データの座標(6,I)に対応する通信エリアとしてこの領域を蓄積する。
【0060】
かかる方法で車両が通信エリアを取得した場合、メッシュのサイズにもよるものの、自車両の位置データと通信エリアの境界を簡易な方法で取得でき、かつデータ量も抑制することができるので、処理時間とデータ送受信のトラフィックを減少させられる。
なお、このような方法でデータ量を削減することは、管理装置と通信する場合のみならず、車両内部に通信エリアDBを持つ場合であっても、処理における制御部等の処理の負荷を軽くし、かつデータベースの容量を減らす効果があるので有効である。
【0061】
変形例による通信エリアの取得方法は、地形DBの地形データに必ずしも依存しない。言い換えると、建物の建築や撤去、道路工事による道路幅や交差点の状況の変化などがあって通信エリアが変化した場合、より実態に沿った通信エリア情報が得られる。そこで、通信エリアDBに保存している通信エリアの情報を、取得した通信エリアの情報により随時更新すれば、通信エリアDBの内容を正確に保ち、別の車両に配信することができる。
【0062】
なお、以上の記載では自車両が停止しているものとして説明したが、自車両が移動中であっても上記の方法を応用することが可能である。自車両が移動している場合、他の車両と通信が成立した時点での自車両の位置データ(メッシュ上の座標)と他の車両の位置データを対応付けて管理装置に送信する。管理装置は、受信したデータを利用して通信エリアDB内の通信エリアの境界情報を更新する。また、通信が途絶した場合についても同様にして通信エリアの境界情報を更新できる。
【0063】
<実施形態3>
本発明の別の実施形態について説明する。この実施形態では、車車間通信の通信エリアに加えて、路車間通信の通信エリアと、路車間通信の路側通信装置が保持する情報がユーザに提示される。
【0064】
図10(a)は、上述した各実施形態の車車間通信システムにおける構成要素を示す図であり、ユーザに提示される画面にも対応している。地図上には、車載端末が取得した現在の通信エリア3と、車車間通信により取得した他の車両2Aの位置が重ね合わせて表示されている。しかし、他の車両2Bは車車間通信の通信エリアにまだ進入していないため、自車両から検出することができず、実際のカーナビ画面上には表示されていない。なお、道路の進行方向左側には建物がないため、通信エリア3は左側に広がっているものとする。
【0065】
そこで本実施形態においては、車車間通信に加え、路側通信装置と路車間通信を行って情報を取得する。その情報には、路車間通信の通信エリアと、路側通信装置が把握してい
る車両の位置データが含まれているものとする。路車間通信を行うタイミングは自由に設定できるが、例えば、実施形態1で図3を用いて説明した処理フローにおいて、さらに路車間通信のステップを追加するようにしても良い。
【0066】
図10(b)は、車車間通信に加えて路車間通信を行い、その結果をカーナビの画面上に表示した様子を示している。図中、路側通信装置5が車両と通信可能な範囲は、路車間通信の通信エリア4として提示されている。また、路車間通信の通信エリア内に存在する他の車両の位置データも画面上に表示される。特に、他の車両2Bは、車車間通信の通信エリア3に入っていないものの、路車間通信の通信エリア4には含まれるため、表示できるようになった。
【0067】
なお、表示される情報が車車間通信と路車間通信のいずれで得られたものであるかは、ユーザの運転操作に影響を与える問題ではない。そこで、カーナビ画面において車車間通信と路車間通信の通信エリアを融合させ、一つの通信エリアとして表示することもできる。その上に、車車間通信および路車間通信で取得した他の車両の位置データを区別することなく重ね合わせて表示することが好ましい。
【0068】
このように、路車間通信の通信エリアと路側通信装置が保持する車両の位置データを画面上に表示することにより、ユーザにとっての死角が少なくなり、安全性の向上という効果が得られる。また、他の車両が車車間通信の車載端末を搭載していないと、車両同士の通信は成立しない。しかし、路側通信装置が、それらの車両との路車間通信やセンサを用いた測定によって位置データを取得していた場合、車車間通信では得られない情報をユーザに提示することが可能になる。
【符号の説明】
【0069】
100:車載端末
102:位置データ取得部
103:通信エリア取得部
108:表示部
109:通信部
【特許請求の範囲】
【請求項1】
自車両の位置データを取得する位置データ取得部と、
他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、
前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、
取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部と
を有する車載端末。
【請求項2】
前記通信エリア取得部は、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと通信エリアが対応付けられた通信エリアデータベースを参照することにより、通信エリアを取得する
ことを特徴とする請求項1に記載の車載端末。
【請求項3】
前記位置データ取得部が取得した自車両の位置データを用いて、位置データと地形データが対応付けられた地形データベースを参照することにより、自車両の周辺の地形データを取得する地形データ取得部をさらに有し、
前記通信エリア取得部は、取得した地形データに基づき伝搬損失モデルを用いた計算を行うことにより、通信エリアを取得する
ことを特徴とする請求項1または2に記載の車載端末。
【請求項4】
前記地形データは、少なくとも道路の幅および建物の配置を含むデータである
ことを特徴とする請求項3に記載の車載端末。
【請求項5】
前記地形データ取得部はさらに、電磁波によるセンサも用いて前記地形データを取得する
ことを特徴とする請求項3または4に記載の車載端末。
【請求項6】
前記通信エリア取得部は、自車両と他の車両との通信が初めて成立した地点、および/または、自車両と他の車両との通信が途絶した地点を通信エリアの境界として取得する
ことを特徴とする請求項1に記載の車載端末。
【請求項7】
前記通信エリア取得部は、所定の時間間隔で通信エリアの取得を行う
ことを特徴とする請求項1〜6のいずれか1項に記載の車載端末。
【請求項8】
前記通信エリア取得部は、自車両が所定の距離を移動するごとに通信エリアの取得を行う
ことを特徴とする請求項1〜6のいずれか1項に記載の車載端末。
【請求項9】
前記通信部は、路車間通信に用いられる路側通信装置と通信を行い、当該路側通信装置が車両と通信できる範囲である路車間通信エリア、および、当該路車間通信エリアに存在する車両の位置データを取得し、
前記表示部はさらに、取得した前記路車間通信エリア、および、前記路車間通信エリアに存在する車両の位置データも表示する
ことを特徴とする請求項1〜8のいずれか1項に記載の車載端末。
【請求項10】
請求項1〜9のいずれか1項に記載の車載端末を搭載した車両と、
通信装置および通信エリアデータベースを有する管理装置と
を含む車車間通信システムであって、
前記車両は、自車両の位置データと、その位置における通信エリアを前記管理装置に送信し、
前記管理装置は、前記車両から受信した位置データと通信エリアを対応付けて前記通信エリアデータベースに記録し、車両からの要求に応じて、または、所定のタイミングで、記録したデータを前記通信装置により車両に送信する
ことを特徴とする車車間通信システム。
【請求項1】
自車両の位置データを取得する位置データ取得部と、
他の車両と通信を行い、当該他の車両の位置データを取得する通信部と、
前記通信部が他の車両と通信可能な範囲である通信エリアを取得する通信エリア取得部と、
取得した他の車両の位置データおよび通信エリアを、地図上に重ね合わせて表示する表示部と
を有する車載端末。
【請求項2】
前記通信エリア取得部は、前記位置データ取得部が取得した自車両の位置データを用いて、位置データと通信エリアが対応付けられた通信エリアデータベースを参照することにより、通信エリアを取得する
ことを特徴とする請求項1に記載の車載端末。
【請求項3】
前記位置データ取得部が取得した自車両の位置データを用いて、位置データと地形データが対応付けられた地形データベースを参照することにより、自車両の周辺の地形データを取得する地形データ取得部をさらに有し、
前記通信エリア取得部は、取得した地形データに基づき伝搬損失モデルを用いた計算を行うことにより、通信エリアを取得する
ことを特徴とする請求項1または2に記載の車載端末。
【請求項4】
前記地形データは、少なくとも道路の幅および建物の配置を含むデータである
ことを特徴とする請求項3に記載の車載端末。
【請求項5】
前記地形データ取得部はさらに、電磁波によるセンサも用いて前記地形データを取得する
ことを特徴とする請求項3または4に記載の車載端末。
【請求項6】
前記通信エリア取得部は、自車両と他の車両との通信が初めて成立した地点、および/または、自車両と他の車両との通信が途絶した地点を通信エリアの境界として取得する
ことを特徴とする請求項1に記載の車載端末。
【請求項7】
前記通信エリア取得部は、所定の時間間隔で通信エリアの取得を行う
ことを特徴とする請求項1〜6のいずれか1項に記載の車載端末。
【請求項8】
前記通信エリア取得部は、自車両が所定の距離を移動するごとに通信エリアの取得を行う
ことを特徴とする請求項1〜6のいずれか1項に記載の車載端末。
【請求項9】
前記通信部は、路車間通信に用いられる路側通信装置と通信を行い、当該路側通信装置が車両と通信できる範囲である路車間通信エリア、および、当該路車間通信エリアに存在する車両の位置データを取得し、
前記表示部はさらに、取得した前記路車間通信エリア、および、前記路車間通信エリアに存在する車両の位置データも表示する
ことを特徴とする請求項1〜8のいずれか1項に記載の車載端末。
【請求項10】
請求項1〜9のいずれか1項に記載の車載端末を搭載した車両と、
通信装置および通信エリアデータベースを有する管理装置と
を含む車車間通信システムであって、
前記車両は、自車両の位置データと、その位置における通信エリアを前記管理装置に送信し、
前記管理装置は、前記車両から受信した位置データと通信エリアを対応付けて前記通信エリアデータベースに記録し、車両からの要求に応じて、または、所定のタイミングで、記録したデータを前記通信装置により車両に送信する
ことを特徴とする車車間通信システム。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−191814(P2011−191814A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−54971(P2010−54971)
【出願日】平成22年3月11日(2010.3.11)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月11日(2010.3.11)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]