
車載表示装置
【課題】車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させる。
【解決手段】表示パターン生成部は、円弧形状の表示パターンPを生成する。そして表示パターン生成部は、円の真下向きを基準の向きとして横Gが加わる向きと大きさに応じて左右それぞれに0〜90°の範囲内で表示パターンPの傾きを変化させる。このような表示パターンPによれば、表示パターンPの傾きは振り子が遠心力で振れる動きを想起させる表示であるので、運転者は車両に加わる横Gを直感的に理解することができる。
【解決手段】表示パターン生成部は、円弧形状の表示パターンPを生成する。そして表示パターン生成部は、円の真下向きを基準の向きとして横Gが加わる向きと大きさに応じて左右それぞれに0〜90°の範囲内で表示パターンPの傾きを変化させる。このような表示パターンPによれば、表示パターンPの傾きは振り子が遠心力で振れる動きを想起させる表示であるので、運転者は車両に加わる横Gを直感的に理解することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に加わる加速度を表示する車載表示装置に関する。
【背景技術】
【0002】
従来より、現在位置において車両に加わる加速度を車両が既に通過した過去の位置における加速度の情報と共に地図画面上に表示する車載表示装置が知られている。
【特許文献1】特開2006−160191号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の車載表示装置では、現在位置及び車両が既に通過した過去の位置における加速度を表示するものであるので、車両がまだ通過していない地点において車両に加わる加速度を表示することはできない。また運転者は表示された加速度が車両に対しどのような影響を及ぼすのかを直感的に理解することができない。
【0004】
本発明は、このような課題を解決するためになされたものであり、その目的は、車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させることが可能な車載表示装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係る車載表示装置は、自車両周囲の地図情報と自車両の車両情報に基づいて車両に加わる旋回加速度を推定し、推定された旋回加速度に基づいて車両に加わる旋回加速度を視覚的に示す表示パターンを生成し、生成された表示パターンを表示する。
【発明の効果】
【0006】
本発明に係る車載表示装置によれば、車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させることができる。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して、本発明の実施形態となる車載表示装置の構成について説明する。
【0008】
〔車載表示装置の構成〕
始めに、図1を参照して、本発明の実施形態となる車載表示装置の構成について説明する。
【0009】
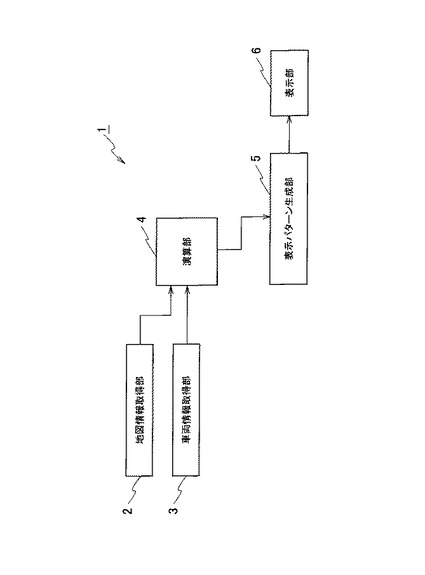
本発明の実施形態となる車載表示装置は、車両に搭載され、図1に示すように、地図情報取得部2,車両情報取得部3,演算部4,表示パターン生成部5,及び表示部6を主な構成要素として備える。地図情報取得部2は、例えばナビゲーションシステム等、地図情報等の道路の形状に関する情報を取得可能な装置により構成されている。本実施形態では、地図情報取得部2は、車両が現在走行している地点や車両の現在位置から100m先の地点等、車両が現在走行中の道路形状から車両の位置を基準とした様々な地点の曲率を取得又は演算して演算部4に出力する。なお地図情報取得部2は、道路の曲率が変化する地点をプロットし、プロットされた地点の曲率及び車両の現在位置からプロットされた地点までの距離を演算して演算部4に出力するようにしてもよい。
【0010】
車両情報取得部3は、車両に取り付けられている公知のセンサにより構成され、車両の速度,車両に加わる旋回加速度(横G)等の車両情報を取得して演算部4に出力する。演算部4は、ナビゲーションシステム内のマイクロコンピュータ等の公知の演算処理装置により構成され、地図情報取得部2,及び車両情報取得部3から入力された情報に基づいて、一般的な遠心力の演算等を行うことにより車両に加わる横Gを推定する。表示パターン生成部5は、公知の画像処理装置により構成され、演算部4により演算された横Gに基づいてこれから車両に加わる横Gを視覚的に示す表示パターンを生成する。表示部6は、液晶ディスプレイ等の公知の表示装置により構成され、表示パターン生成部5により生成された表示パターンを表示する。
【0011】
車両情報取得部2が車両に加わっている横Gを検出できる場合、演算部5は予測した横Gの代わりに車両情報取得部2により検出された横Gを用いて表示パターンPの傾きを演算してもよい。このような処理によれば、現在車両に加わっている横Gに基づいて表示パターンPが生成されるので、運転者は、現在車両に加わっている横Gと表示パターンPの関係を正確に理解して車両操作の判断を行うことができる。また演算部5は、予測した横Gと車両情報取得部2により検出された横Gの差分値を算出し、差分値が小さくなるように横Gの予測に用いる計算式に係数を設定してもよい。さらに演算部5は、予測した横Gと検出された横Gそれぞれについて表示パターンPの傾きを演算し、表示パターン生成部6は予測した横Gと検出された横Gそれぞれに対応する表示パターンPを生成してもよい。このような処理によれば、運転者は現在の横Gを基準として予測された横Gを理解して車両操作の判断を行うことができる。
【0012】
〔表示パターンの構成〕
次に、図2(a),(b)を参照して、表示パターン生成部6が生成する表示パターンの構成について説明する。
【0013】
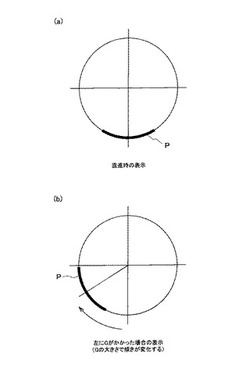
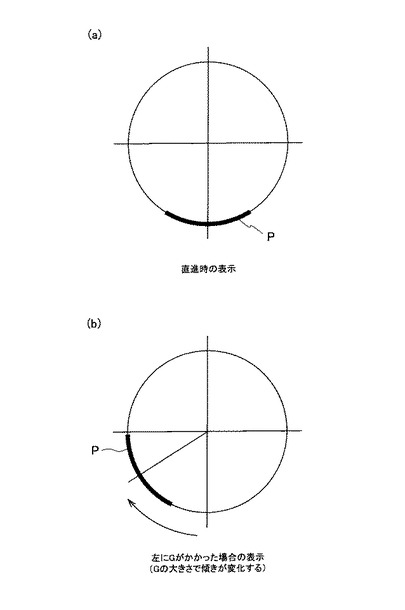
表示パターン生成部5は、図2(a),(b)に示すような円弧形状の表示パターンPを生成する。そして表示パターン生成部5は、円の真下向きを基準の向きとして横Gが加わる向きと大きさに応じて左右それぞれに0〜90°の範囲内で表示パターンPの傾きを変化させる。なお図中、表示パターンP以外の線は理解を容易にするための補助線である。本実施形態では、演算部4が予測された横Gをパラメータとして表示パターンPの傾きを演算する。例えば車両の限界旋回加速度が0.8G程度である場合、演算部4は、横Gが0.8G以上である時は表示パターンPの傾きが90°、横Gが0〜0.8Gの範囲内にある時には0〜90°の範囲内の角度を直線的に補間した傾き(例えば横Gと角度が比例関係)になるように表示パターンPの傾きを演算する。なお表示パターンPの傾きが90°になる横Gは、車両の限界旋回加速度と同じ値でなくてもよく、限界旋回加速度の8割の値等、適当なマージンを見込んだ値としてもよい。
【0014】
このような表示パターンPによれば、表示パターンPの傾きは振り子が遠心力で振れる動きを想起させる表示であるので、運転者は表示パターンPの傾きに基づいてこれから車両に加わる横Gを直感的に理解することができる。また円の中心点を基準として表示パターンPを回転させる場合、表示パターンPはかならず円周上を移動することになるため、例えば表示部7が液晶ディスプレイ等の表示装置ではなく、LEDを配列した表示器である場合であっても、LEDを円周上に配置すればよく、安いコストで表示を行うことができる。
【0015】
本実施形態では、通常時は、表示パターン生成部5は表示パターンPの長さを例えば中心角60度等というように規定値に設定する。一方、コーナーに対する自車両の速度が十分に低く、表示パターンの傾きがほぼ0度に近い場合、表示パターン生成部5は、表示パターンPを表示する必要性が低いと判断し、表示パターンPを生成しない若しくは表示パターンPの長さを中心角0度とする。具体的には、演算部4により演算された傾きの絶対値が0〜5度の状態が1秒間続いた場合、表示パターン生成部5は表示パターンPを生成しない。このような処理によれば、運転状況に応じた表示を運転者に提供することができる。
【0016】
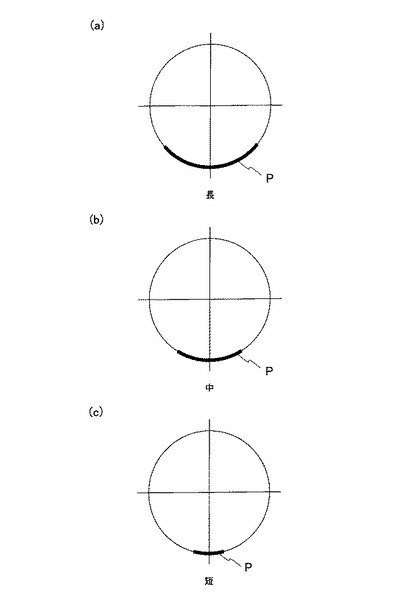
なお表示パターンPの表示を突然消すのではなく、表示パターンPの傾きが所定時間小さい場合、表示パターン生成部5は、図3(a),(b),(c)に示すように、表示パターンPの長さを徐々に短くしていき、最後には表示パターンPの長さを中心角0度に設定するような表示としても良い。この場合、表示パターン生成部5は、表示パターンPの両端から中心に向かって短くしていっても良いし、一方端から他方端に向かって表示を短くしていっても良い。通常表示から表示が消えるまでの中間表示を有することにより、唐突に表示がオン/オフして、運転者の注意を引いてしまうことを抑制できる。なお表示パターンPの長さ以外にも表示パターンPの色や輝度を変化させるパラメータとして持たせ、消えるまでの中間表示を作成しても良い。
【0017】
また表示パターンPが短くなっている途中又は表示が消えている場合において、演算部4により演算された傾きが突然大きくなった場合には、表示パターン生成部5は表示パターンPの長さを規定値に戻す。このような処理によれば、再び表示パターンPを表示する必要が生じた際に表示を行うことができる。表示パターンPの長さを戻す際には、表示パターンPの長さを短くしていったのと逆の手順を踏んで徐々に長くしていっても良いし、すぐに規定値に戻してもよい。演算部4により演算された傾きが極めて大きく、車両に対し急激に横Gが加わる又は加わると予測される場合には、表示パターンPの長さをすぐに規定値に戻して表示し、緩やかに横Gが加わる又は加わると予測される場合であれば、表示パターンPの長さを徐々に長くしていき、規定値まで戻していく手順も考えられる。色や輝度を変化させて消えるまでの中間表示を作成している場合も同様に規定値に戻す。
【0018】
以上、本発明者らによってなされた発明を適用した実施の形態について説明したが、この実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。例えば本実施形態では、表示パターン生成部5が表示パターンPの長さや表示/非表示を制御したが、演算部4がこの制御を行ってよい。演算部4がこの制御を行う場合には、自車両の通過する道路形状を元に表示・非表示を制御することが可能になる。このように、本実施形態に基づいて当業者等によりなされる他の実施の形態、実施例及び運用技術等は全て本発明の範疇に含まれる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態となる車載表示装置の構成を示すブロック図である。
【図2】本発明の実施形態となる表示パターンを示す模式図である。
【図3】演算部の演算履歴に基づいて表示パターンの長さが変化する様子を示す模式図である。
【符号の説明】
【0020】
1:車載表示装置
2:地図情報取得部
3:車両情報取得部
4:演算部
5:表示パターン生成部
6:表示部
P:表示パターン
【技術分野】
【0001】
本発明は、車両に加わる加速度を表示する車載表示装置に関する。
【背景技術】
【0002】
従来より、現在位置において車両に加わる加速度を車両が既に通過した過去の位置における加速度の情報と共に地図画面上に表示する車載表示装置が知られている。
【特許文献1】特開2006−160191号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
従来の車載表示装置では、現在位置及び車両が既に通過した過去の位置における加速度を表示するものであるので、車両がまだ通過していない地点において車両に加わる加速度を表示することはできない。また運転者は表示された加速度が車両に対しどのような影響を及ぼすのかを直感的に理解することができない。
【0004】
本発明は、このような課題を解決するためになされたものであり、その目的は、車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させることが可能な車載表示装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係る車載表示装置は、自車両周囲の地図情報と自車両の車両情報に基づいて車両に加わる旋回加速度を推定し、推定された旋回加速度に基づいて車両に加わる旋回加速度を視覚的に示す表示パターンを生成し、生成された表示パターンを表示する。
【発明の効果】
【0006】
本発明に係る車載表示装置によれば、車両が将来通過する地点において車両に加わる加速度を表示すると共に表示された加速度が車両に対しどのような影響を及ぼすのかを運転者に直感的に理解させることができる。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して、本発明の実施形態となる車載表示装置の構成について説明する。
【0008】
〔車載表示装置の構成〕
始めに、図1を参照して、本発明の実施形態となる車載表示装置の構成について説明する。
【0009】
本発明の実施形態となる車載表示装置は、車両に搭載され、図1に示すように、地図情報取得部2,車両情報取得部3,演算部4,表示パターン生成部5,及び表示部6を主な構成要素として備える。地図情報取得部2は、例えばナビゲーションシステム等、地図情報等の道路の形状に関する情報を取得可能な装置により構成されている。本実施形態では、地図情報取得部2は、車両が現在走行している地点や車両の現在位置から100m先の地点等、車両が現在走行中の道路形状から車両の位置を基準とした様々な地点の曲率を取得又は演算して演算部4に出力する。なお地図情報取得部2は、道路の曲率が変化する地点をプロットし、プロットされた地点の曲率及び車両の現在位置からプロットされた地点までの距離を演算して演算部4に出力するようにしてもよい。
【0010】
車両情報取得部3は、車両に取り付けられている公知のセンサにより構成され、車両の速度,車両に加わる旋回加速度(横G)等の車両情報を取得して演算部4に出力する。演算部4は、ナビゲーションシステム内のマイクロコンピュータ等の公知の演算処理装置により構成され、地図情報取得部2,及び車両情報取得部3から入力された情報に基づいて、一般的な遠心力の演算等を行うことにより車両に加わる横Gを推定する。表示パターン生成部5は、公知の画像処理装置により構成され、演算部4により演算された横Gに基づいてこれから車両に加わる横Gを視覚的に示す表示パターンを生成する。表示部6は、液晶ディスプレイ等の公知の表示装置により構成され、表示パターン生成部5により生成された表示パターンを表示する。
【0011】
車両情報取得部2が車両に加わっている横Gを検出できる場合、演算部5は予測した横Gの代わりに車両情報取得部2により検出された横Gを用いて表示パターンPの傾きを演算してもよい。このような処理によれば、現在車両に加わっている横Gに基づいて表示パターンPが生成されるので、運転者は、現在車両に加わっている横Gと表示パターンPの関係を正確に理解して車両操作の判断を行うことができる。また演算部5は、予測した横Gと車両情報取得部2により検出された横Gの差分値を算出し、差分値が小さくなるように横Gの予測に用いる計算式に係数を設定してもよい。さらに演算部5は、予測した横Gと検出された横Gそれぞれについて表示パターンPの傾きを演算し、表示パターン生成部6は予測した横Gと検出された横Gそれぞれに対応する表示パターンPを生成してもよい。このような処理によれば、運転者は現在の横Gを基準として予測された横Gを理解して車両操作の判断を行うことができる。
【0012】
〔表示パターンの構成〕
次に、図2(a),(b)を参照して、表示パターン生成部6が生成する表示パターンの構成について説明する。
【0013】
表示パターン生成部5は、図2(a),(b)に示すような円弧形状の表示パターンPを生成する。そして表示パターン生成部5は、円の真下向きを基準の向きとして横Gが加わる向きと大きさに応じて左右それぞれに0〜90°の範囲内で表示パターンPの傾きを変化させる。なお図中、表示パターンP以外の線は理解を容易にするための補助線である。本実施形態では、演算部4が予測された横Gをパラメータとして表示パターンPの傾きを演算する。例えば車両の限界旋回加速度が0.8G程度である場合、演算部4は、横Gが0.8G以上である時は表示パターンPの傾きが90°、横Gが0〜0.8Gの範囲内にある時には0〜90°の範囲内の角度を直線的に補間した傾き(例えば横Gと角度が比例関係)になるように表示パターンPの傾きを演算する。なお表示パターンPの傾きが90°になる横Gは、車両の限界旋回加速度と同じ値でなくてもよく、限界旋回加速度の8割の値等、適当なマージンを見込んだ値としてもよい。
【0014】
このような表示パターンPによれば、表示パターンPの傾きは振り子が遠心力で振れる動きを想起させる表示であるので、運転者は表示パターンPの傾きに基づいてこれから車両に加わる横Gを直感的に理解することができる。また円の中心点を基準として表示パターンPを回転させる場合、表示パターンPはかならず円周上を移動することになるため、例えば表示部7が液晶ディスプレイ等の表示装置ではなく、LEDを配列した表示器である場合であっても、LEDを円周上に配置すればよく、安いコストで表示を行うことができる。
【0015】
本実施形態では、通常時は、表示パターン生成部5は表示パターンPの長さを例えば中心角60度等というように規定値に設定する。一方、コーナーに対する自車両の速度が十分に低く、表示パターンの傾きがほぼ0度に近い場合、表示パターン生成部5は、表示パターンPを表示する必要性が低いと判断し、表示パターンPを生成しない若しくは表示パターンPの長さを中心角0度とする。具体的には、演算部4により演算された傾きの絶対値が0〜5度の状態が1秒間続いた場合、表示パターン生成部5は表示パターンPを生成しない。このような処理によれば、運転状況に応じた表示を運転者に提供することができる。
【0016】
なお表示パターンPの表示を突然消すのではなく、表示パターンPの傾きが所定時間小さい場合、表示パターン生成部5は、図3(a),(b),(c)に示すように、表示パターンPの長さを徐々に短くしていき、最後には表示パターンPの長さを中心角0度に設定するような表示としても良い。この場合、表示パターン生成部5は、表示パターンPの両端から中心に向かって短くしていっても良いし、一方端から他方端に向かって表示を短くしていっても良い。通常表示から表示が消えるまでの中間表示を有することにより、唐突に表示がオン/オフして、運転者の注意を引いてしまうことを抑制できる。なお表示パターンPの長さ以外にも表示パターンPの色や輝度を変化させるパラメータとして持たせ、消えるまでの中間表示を作成しても良い。
【0017】
また表示パターンPが短くなっている途中又は表示が消えている場合において、演算部4により演算された傾きが突然大きくなった場合には、表示パターン生成部5は表示パターンPの長さを規定値に戻す。このような処理によれば、再び表示パターンPを表示する必要が生じた際に表示を行うことができる。表示パターンPの長さを戻す際には、表示パターンPの長さを短くしていったのと逆の手順を踏んで徐々に長くしていっても良いし、すぐに規定値に戻してもよい。演算部4により演算された傾きが極めて大きく、車両に対し急激に横Gが加わる又は加わると予測される場合には、表示パターンPの長さをすぐに規定値に戻して表示し、緩やかに横Gが加わる又は加わると予測される場合であれば、表示パターンPの長さを徐々に長くしていき、規定値まで戻していく手順も考えられる。色や輝度を変化させて消えるまでの中間表示を作成している場合も同様に規定値に戻す。
【0018】
以上、本発明者らによってなされた発明を適用した実施の形態について説明したが、この実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。例えば本実施形態では、表示パターン生成部5が表示パターンPの長さや表示/非表示を制御したが、演算部4がこの制御を行ってよい。演算部4がこの制御を行う場合には、自車両の通過する道路形状を元に表示・非表示を制御することが可能になる。このように、本実施形態に基づいて当業者等によりなされる他の実施の形態、実施例及び運用技術等は全て本発明の範疇に含まれる。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態となる車載表示装置の構成を示すブロック図である。
【図2】本発明の実施形態となる表示パターンを示す模式図である。
【図3】演算部の演算履歴に基づいて表示パターンの長さが変化する様子を示す模式図である。
【符号の説明】
【0020】
1:車載表示装置
2:地図情報取得部
3:車両情報取得部
4:演算部
5:表示パターン生成部
6:表示部
P:表示パターン
【特許請求の範囲】
【請求項1】
自車両周囲の地図情報を取得する地図情報取得手段と、
自車両の車両情報を取得する車両情報取得手段と、
前記地図情報取得手段が取得した地図情報と前記車両情報取得手段が取得した車両情報に基づいて車両に加わる旋回加速度を推定する旋回加速度推定手段と、
前記旋回加速度推定手段により推定された旋回加速度に基づいて車両に加わる旋回加速度を視覚的に示す表示パターンを生成する表示パターン生成手段と、
前記表示パターン生成手段により生成された表示パターンを表示する表示手段と
を備えることを特徴とする車載表示装置。
【請求項2】
請求項1に記載の車載表示装置において、
前記表示パターン生成手段は、円弧形状を有し、且つ、表示の下方向を基準とした円弧の中心点からみた傾きが前記旋回加速度に応じて変化する表示パターンを生成することを特徴とする車載表示装置。
【請求項3】
請求項2に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの表示態様を変化させることを特徴とする車載表示装置。
【請求項4】
請求項3に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの表示のオン/オフを制御することを特徴とする車載表示装置。
【請求項5】
請求項3又は請求項4に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの長さを変化させることを特徴とする車載表示装置。
【請求項6】
請求項5に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段により推定された旋回加速度が所定時間以上所定値以下である場合、表示パターンの長さを短くすることを特徴とする車載表示装置。
【請求項7】
請求項6に記載の車載表示装置において、
前記表示パターン生成手段は、表示パターンが短い状態において旋回加速度が所定値以上になった場合、表示パターンの長さを基準値に戻すことを特徴とする車載表示装置。
【請求項1】
自車両周囲の地図情報を取得する地図情報取得手段と、
自車両の車両情報を取得する車両情報取得手段と、
前記地図情報取得手段が取得した地図情報と前記車両情報取得手段が取得した車両情報に基づいて車両に加わる旋回加速度を推定する旋回加速度推定手段と、
前記旋回加速度推定手段により推定された旋回加速度に基づいて車両に加わる旋回加速度を視覚的に示す表示パターンを生成する表示パターン生成手段と、
前記表示パターン生成手段により生成された表示パターンを表示する表示手段と
を備えることを特徴とする車載表示装置。
【請求項2】
請求項1に記載の車載表示装置において、
前記表示パターン生成手段は、円弧形状を有し、且つ、表示の下方向を基準とした円弧の中心点からみた傾きが前記旋回加速度に応じて変化する表示パターンを生成することを特徴とする車載表示装置。
【請求項3】
請求項2に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの表示態様を変化させることを特徴とする車載表示装置。
【請求項4】
請求項3に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの表示のオン/オフを制御することを特徴とする車載表示装置。
【請求項5】
請求項3又は請求項4に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段の推定履歴に基づいて表示パターンの長さを変化させることを特徴とする車載表示装置。
【請求項6】
請求項5に記載の車載表示装置において、
前記表示パターン生成手段は、前記旋回加速度推定手段により推定された旋回加速度が所定時間以上所定値以下である場合、表示パターンの長さを短くすることを特徴とする車載表示装置。
【請求項7】
請求項6に記載の車載表示装置において、
前記表示パターン生成手段は、表示パターンが短い状態において旋回加速度が所定値以上になった場合、表示パターンの長さを基準値に戻すことを特徴とする車載表示装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−2381(P2010−2381A)
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願番号】特願2008−163261(P2008−163261)
【出願日】平成20年6月23日(2008.6.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願日】平成20年6月23日(2008.6.23)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]