
車載装置およびその制御方法
【課題】検出した物体が車内または車外のどちらに存在するかを簡単な構成で判別することができるようにする。
【解決手段】指向性切替部23は、電波センサ11の狭指向性アンテナ13aと広指向性アンテナ13bの切替を制御する。内外判定部22は、電波センサ11が狭指向性アンテナ13aで電波を出力して受信される信号の信号強度と、広指向性アンテナ13bで電波を出力して受信される信号の信号強度を比較し、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかを判定する。本発明は、例えば、車載装置に適用できる。
【解決手段】指向性切替部23は、電波センサ11の狭指向性アンテナ13aと広指向性アンテナ13bの切替を制御する。内外判定部22は、電波センサ11が狭指向性アンテナ13aで電波を出力して受信される信号の信号強度と、広指向性アンテナ13bで電波を出力して受信される信号の信号強度を比較し、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかを判定する。本発明は、例えば、車載装置に適用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載装置およびその制御方法に関し、特に、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができるようにする車載装置およびその制御方法に関する。
【背景技術】
【0002】
自動車には、自動車そのものの盗難や、車内の装備の盗難等を防止するため、不審者の侵入を検出するセキュリティシステムを備えるものがある。
【0003】
セキュリティシステムの車内への不審者の侵入を検出するセンサには、例えば、電波式の検出センサ(以下、単に、電波センサと称する)が用いられる。電波センサは、所定の周波数の信号(電波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信して、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から物体を検出する、ドップラ効果を利用したセンサである。
【0004】
上述の電波センサにおいて、受信信号の振幅(信号強度)は、検出対象の物体の大きさに比例し、物体までの距離に反比例する。すなわち、検出対象の物体が大きいほど、受信信号の振幅は大きくなり、検出対象の物体までの距離が近いほど、受信信号の振幅は大きくなる。そのため、大きくて遠くにある物体と、小さくて近くにある物体とで、信号強度が同等のレベルとなることがある。また、電波は、自動車の窓を通して車外へも漏洩し、電波センサは、車外の物体に反射した信号も受信する。これにより、検出された物体が車内の物体であるのか、または車外の物体であるのかを判別するのが困難な場合があった。英国の保険会社が規定する要件で言えば、車室内に挿入される面積の小さい金属片と、車室外で動く面積の大きい金属片とを判別するのが難しいという問題があった。
【0005】
この問題に対し、例えば、電波センサと超音波センサの2つのセンサを用いることで、物体が車内の物体であるのか、または車外の物体であるのかを確実に識別しようとする技術などが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−123728号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1で提案される方式では、電波センサ以外の超音波センサと、それに対応する信号処理回路も必要となるため、信号処理も複雑となり、製造コストも増大する。
【0008】
本発明は、このような状況に鑑みてなされたものであり、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができるようにするものである。
【課題を解決するための手段】
【0009】
本発明の車載装置は、自動車に搭載され、所定の物体を検出する車載装置において、アンテナの指向性を狭角と広角に切り替え可能な電波センサと、前記電波センサの前記アンテナの指向性の切り替えを制御する切替制御手段と、前記電波センサからの出力信号の信号強度を検出する検出手段と、狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段とを備える。
【0010】
本発明の車載装置においては、電波センサのアンテナの指向性の切り替えが制御され、狭角の指向性で電波を出力したときの信号強度と、広角の指向性で電波を出力したときの信号強度とが検出され、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0011】
これにより、狭角または広角のいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0012】
前記電波センサは、例えば、複数のパッチアンテナを有する電波センサにより構成される。前記切替制御手段は、例えば、指向性切替部により構成され、前記検出手段は、例えば、信号強度検出部により構成され、前記判定手段は、内外判定部により構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【0013】
前記判定手段には、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より小さいとき、検出された前記物体が車外に存在すると判定させることができる。これにより、検出した物体が車外にあることを簡単な構成で判別することができる。
【0014】
前記判定手段により、検出された前記物体が車外に存在すると判定された場合、検出された前記物体が前記自動車の運転者であるかを認証する認証処理を開始させる認証制御手段をさらに備えることができる。これにより、運転者が有する携帯機が正当なものであると判定された場合には、自分の自動車に近づいてきた運転者に対して、自動的にドアが開錠され、フットライトが自動点灯される等の所謂ウェルカム動作を行うことができ、運転者の操作性や快適性が向上する。認証制御手段は、例えば、駆動制御部により構成される。
【0015】
前記判定手段には、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より大きいとき、検出された前記物体が車内に存在すると判定させることができる。これにより、不正な侵入者を検出し、警報を発することができる。
【0016】
本発明の車載装置の制御方法は、アンテナの指向性を狭角と広角に切り替え可能な電波センサを有する車載装置の制御方法において、狭角と広角のそれぞれに指向性を切り替えて、前記電波センサからの出力信号の信号強度を検出し、狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する。
【0017】
本発明の車載装置の制御方法においては、狭角と広角のそれぞれに指向性を切り替えて、電波センサからの出力信号の信号強度が検出され、狭角の指向性で電波を出力したときの信号強度と、広角の指向性で電波を出力したときの信号強度との比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0018】
これにより、狭角または広角のいずれか一方による信号強度が同レベルである場合にも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0019】
この制御方法は、例えば、指向性切替部が、狭角または広角を指示する切替制御信号を電波センサに供給し、信号強度検出部が、電波センサが出力した信号の信号強度を検出し、内外判定部が、狭角の指向性で電波を出力したときに検出された信号強度と、広角の指向性で電波を出力したときに検出された信号強度とを比較して、物体が車内にいるか、または車外にいるかを判定するステップにより構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【0020】
本発明の車載装置は、自動車に搭載され、所定の物体を検出する車載装置において、狭角の指向性を有する狭角超音波センサと、広角の指向性を有する広角超音波センサと、前記狭角超音波センサと前記広角超音波センサの駆動の切り替えを制御する切替制御手段と、前記狭角超音波センサと前記広角超音波センサのからの出力信号の信号強度を検出する検出手段と、前記狭角超音波センサから超音波を出力したときの前記信号強度と、前記広角超音波センサから超音波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段とを備える。
【0021】
本発明の車載装置においては、狭角超音波センサと広角超音波センサの駆動の切り替えが制御され、狭角超音波センサから超音波を出力したときの信号強度と、広角超音波センサから超音波を出力したときの信号強度とが検出され、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0022】
これにより、狭角または広角のいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0023】
前記狭角超音波センサと広角超音波センサは、例えば、ホーン形状が異なる超音波センサにより構成される。前記切替制御手段は、例えば、指向性切替部により構成され、前記検出手段は、例えば、信号強度検出部により構成され、前記判定手段は、内外判定部により構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【発明の効果】
【0024】
本発明によれば、検出した物体が車内または車外のどちらにあるかを判別することができる。また、本発明によれば、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【図面の簡単な説明】
【0025】
【図1】本発明を適用した自動車の一実施の形態の構成例を示すブロック図である。
【図2】電波センサの指向性を示す図である。
【図3】物体の車内と車外の判別方法について説明する図である。
【図4】物体の車内と車外の判別方法について説明する図である。
【図5】物体検出処理を説明するフローチャートである。
【図6】本発明を適用した自動車のその他の実施の形態の構成例を示すブロック図である。
【発明を実施するための形態】
【0026】
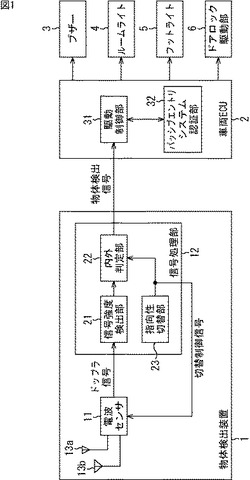
図1は、本発明を適用した自動車の一実施の形態の構成例を示している。
【0027】
図1の自動車は、物体検出の有無を表す物体検出信号を出力する物体検出装置1と、物体検出装置1からの物体検出信号に基づいて、自動車のブザー3、ルームライト4、フットライト5、およびドアロック駆動部6を制御する車両ECU(Electronic Control Unit)2とを有する。
【0028】
車載装置としての物体検出装置1は、電波センサ11と、電波センサ11からの出力信号を処理する信号処理部12とから構成される。信号処理部12は、信号強度検出部21、内外判定部22、および指向性切替部23により構成される。
【0029】
電波センサ11は、所定の周波数の信号(電波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信する。そして、電波センサ11は、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から、物体を検出するドップラ信号を出力信号として出力する。
【0030】
電波センサ11は、狭角の指向性を有するアンテナ13aと、広角の指向性を有するアンテナ13bを有している。なお、以下において、アンテナ13aを狭指向性アンテナ13a、アンテナ13bを広指向性アンテナ13bと称する。電波センサ11は、信号処理部12から供給される切替制御信号により狭角が指示された場合には、狭指向性アンテナ13aから信号(電波)を送信し、広角が指示された場合には、広指向性アンテナ13bから信号(電波)を送信する。電波センサ11は、電波を送信した狭指向性アンテナ13aまたは広指向性アンテナ13bと同一のアンテナで、所定の物体に反射して返ってくる信号を受信する。
【0031】
電波センサ11は、例えば、送信信号となる所定の周波数の信号を生成する発振回路、アンテナ13aまたはアンテナ13bが受信した受信信号と送信信号とを乗算する乗算回路、乗算後の信号をローパス(Low Pass)処理するローパスフィルタ、ローパス処理して得られるドップラ信号を増幅して出力するアンプ等により構成される。
【0032】
なお、狭指向性アンテナ13aと広指向性アンテナ13bは、それぞれ独立したアンテナとして設けてもよいし、その一部または全部を共用するものでもよい。例えば、電波センサ11は、所定の位置に配列された4つのパッチアンテナを有し、高周波スイッチ等を用いて給電の有無を切り替えることにより、2つのパッチアンテナを使用する場合と、4つのパッチアンテナを使用する場合とを切り替える。4つのパッチアンテナを用いた場合、狭指向性アンテナ13aとして動作させることができ、2つのパッチアンテナを用いた場合、広指向性アンテナ13bとして動作させることができる。
【0033】
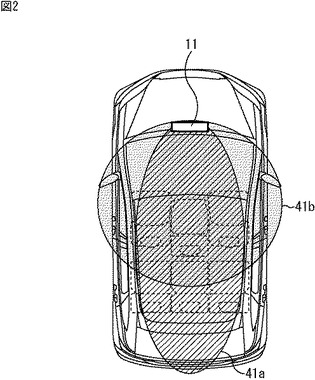
例えば、狭指向性アンテナ13aの指向性は、図2の放射範囲41aで示される。また、広指向性アンテナ13bの指向性は、図2の放射範囲41bで示される。図2において、電波センサ11は、例えば、図示せぬマップランプ内に取り付けられている。
【0034】
信号処理部12の信号強度検出部21は、電波センサ11から供給されるドップラ信号の信号強度(振幅)を検出し、その検出結果を内外判定部22に供給する。
【0035】
内外判定部22には、狭指向性アンテナ13aおよび広指向性13bそれぞれで受信して得られたドップラ信号の信号強度が、信号強度検出部21から供給される。内外判定部22は、指向性切替部23から供給される切替制御信号が狭角を示している場合、信号強度検出部21から供給される信号強度が、狭指向性アンテナ13aで受信した受信信号に対応するドップラ信号の信号強度(以下、適宜、狭指向性アンテナ13aのドップラ信号と称する)であると認識する。一方、指向性切替部23から供給される切替制御信号が広角を示している場合、内外判定部22は、信号強度検出部21から供給される信号強度が、広指向性アンテナ13bで受信した受信信号に対応するドップラ信号の信号強度(以下、適宜、広指向性アンテナ13bのドップラ信号)であると認識する。
【0036】
内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを比較して、検出された物体が車内にいるか、または車外にいるかを判定する。内外判定部22は、判定結果としての車内または車外のいずれかを表す信号を、物体検出信号として、車両ECU2に供給する。なお、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを用いて、検出された物体が車内にいるか、または車外にいるかをどのように判定するかについては、図3および図4を参照して後述する。
【0037】
指向性切替部23は、電波センサ11の狭指向性アンテナ13aと広指向性アンテナ13bの切替を制御する。指向性切替部23は、狭角または広角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0038】
信号処理部12は、例えば、CPU(Central Processing Unit),ROM(Read Only Memory),RAM(Random Access Memory)やASIC (Application Specific Integrated Circuit)などで構成することができる。
【0039】
車両ECU2は、駆動制御部31とパッシブエントリシステム認証部32を少なくとも有する。
【0040】
駆動制御部31は、物体検出信号が車内の物体を検出したことを表している場合、検出した物体が不正な侵入者である可能性が高いので、ブザー3を鳴動させ、警報を発する。一方、駆動制御部31は、物体検出信号が車外の物体を検出したことを表している場合、
検出された物体が自動車の所有者(運転者)であるかを判定するため、パッシブエントリシステム認証部32に認証処理を実行させる。そして、駆動制御部31は、パッシブエントリシステム認証部32から、自動車の所有者であることを示す情報が供給された場合、ルームライト4およびフットライト5を点灯させ、ドアを開錠させる制御信号をドアロック駆動部6に供給する。
【0041】
パッシブエントリシステム認証部32は、自動車の所有者が有する携帯機(図示せず)と無線通信を行い、携帯機から送信されてくる識別IDが、内部に記憶している識別IDと一致するか否かにより、運転者であるか否かを認証する。運転者であると判定された場合には、パッシブエントリシステム認証部32は、運転者であることを示す情報を供給駆動制御部31に供給する。例えば、検出された物体が自動車の周辺を通り抜ける人(通行人)である場合には、認証処理は成功しないので、運転者であることを示す情報は供給駆動制御部31に供給されず、ルームライト4の点灯やドアの開錠等は行われない。
【0042】
以上のような構成を有する自動車においては、狭指向性アンテナ13aのドップラ信号の信号強度と、広指向性アンテナ13bのドップラ信号の信号強度とを用いて、検出された物体が車内に存在するか、または車外に存在するかが判定される。そして、車内の物体が検出された場合には、警報としてのブザー3が鳴動する。これにより、不正な侵入者を検出し、警報を発することができる。
【0043】
一方、車外の物体が検出された場合には、運転者であるかの認証処理が行われ、運転者であると認定された場合、ルームライト4およびフットライト5の点灯やドアの開錠等の所謂ウェルカム動作が行われる。これにより、運転者の操作性や快適性を向上させることができる。
【0044】
次に、図3および図4を参照して、検出された物体が車内に存在するか、または車外に存在するかの判別方法について説明する。
【0045】
いま検出対象の物体として所定のサイズXLの金属片が車内と車外とにある場合を想定し、従来のように、1種類の指向性のアンテナのみで検出するものとする。
【0046】
例えば、1種類の指向性のアンテナとしての、狭指向性アンテナ13aで、車内と車外のそれぞれにあるサイズXLの金属片を検出した場合、検出されるドップラ信号の信号強度は、図3のグラフ51aに示されるようになる。
【0047】
即ち、同一サイズXLの金属片では、車内の金属片の方が距離が近くなるため、狭指向性アンテナ13aのドップラ信号の信号強度がより大となる。このような同一サイズXLの物体の検出では、車内と車外に明らかに信号強度に差が生じるので、問題は生じない。
【0048】
しかしながら、車内において検出する金属片のサイズを、サイズXLよりも徐々に小さくすると、図3のグラフ51bに示されるように、車外でサイズXLの金属片を検出したときと同一の信号強度となるサイズXSが存在する。このような場合、1種類の指向性のアンテナ(狭指向性アンテナ13a)のみで、車内の物体を検出することが難しい。即ち、1種類の指向性のアンテナでは、物体が車内に存在する場合と車外に存在する場合の両方が考えられる状況が存在する。また、信号強度が完全に同一でなくても、信号の感度の違い(製造誤差)、マージン等を考慮すると、所定の範囲で、同様の状況が発生する。
【0049】
そこで、車内ではサイズXSの金属片を検出し、車外では、それより大きいサイズXLの金属片を検出する同一の条件で、広指向性アンテナ13bにより受信すると、広指向性アンテナ13bのドップラ信号の信号強度は、図3のグラフ51cに示されるようになる。
【0050】
広指向性アンテナ13bでは、狭指向性アンテナ13aよりも信号出力(電力)が弱まるので、車内のサイズXSの金属片を検出したドップラ信号の信号強度は、狭指向性アンテナ13aにおける場合よりも小さくなる。反対に、車外の位置では、狭指向性アンテナ13aよりも信号出力が強まるので、サイズXLの金属片を検出したドップラ信号の信号強度は狭指向性アンテナ13aにおける場合よりも大きくなる。
【0051】
図3のグラフ51bとグラフ51cの信号強度を車内と車外とで整理すると、図4に示されるようになる。
【0052】
即ち、狭指向性アンテナ13aのドップラ信号だけでは、車内か車外か判別するのが難しい場合でも、検出された物体(金属片)が車内にある場合には、図4のグラフ61aに示されるように、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度より大きいという関係が得られる。
【0053】
また、検出された物体(金属片)が車外にある場合には、図4のグラフ61bに示されるように、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度より小さいという関係が得られる。
【0054】
従って、内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを比較して、グラフ61aに示される関係がある場合には、検出された物体が車内にあると判定する。一方、内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度との間に、グラフ61bに示される関係がある場合には、検出された物体が車外にあると判定する。
【0055】
これにより、検出した物体が車内または車外のどちらにあるかを正確に判別することができる。
【0056】
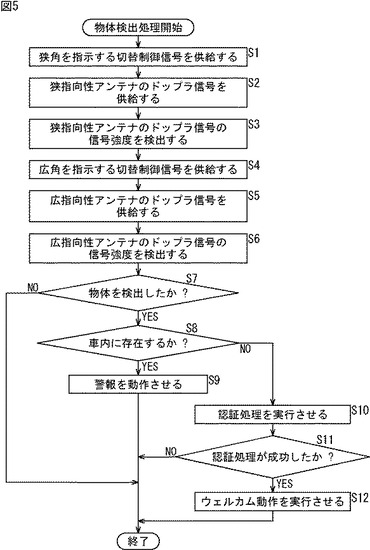
次に、図5のフローチャートを参照して、図1の自動車における物体検出処理について説明する。例えば、この処理は、運転者が自動車のドアをロックしてから所定時間が経過したとき、又は、運転者が自動車から一定距離以上離れたときに、開始することができる。
【0057】
初めに、ステップS1において、信号処理部12の指向性切替部23は、狭角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0058】
ステップS2において、電波センサ11は、狭角を指示する切替制御信号に基づいて、狭指向性アンテナ13aのドップラ信号を信号強度検出部21に供給する。即ち、電波センサ11は、狭指向性アンテナ13aから信号(電波)を出力し、所定の物体に反射して返ってくる信号(電波)を受信する。さらに、電波センサ11は、送信信号と受信信号の差分信号をローパス(Low Pass)処理して得られるドップラ信号を、必要に応じて増幅し、信号強度検出部21に供給する。
【0059】
ステップS3において、信号強度検出部21は、電波センサ11から供給されるドップラ信号の信号強度を検出し、その検出結果を内外判定部22に供給する。
【0060】
ステップS4において、信号処理部12の指向性切替部23は、広角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0061】
ステップS5において、電波センサ11は、広角を指示する切替制御信号に基づいて、広指向性アンテナ13bのドップラ信号を信号強度検出部21に供給する。この処理は、上述したステップS2の処理と同様である。
【0062】
ステップS6において、信号強度検出部21は、広指向性アンテナ13bのドップラ信号の信号強度を検出し、その検出結果を内外判定部22に供給する。この処理は、上述したステップS3の処理と同様である。
【0063】
ステップS7において、内外判定部22は、物体を検出したかを判定する。即ち、内外判定部22は、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度の少なくともいずれか一方が物体検出を判別する所定の閾値以上であるかを判定する。
【0064】
ステップS7において、物体を検出していないと判定された場合、即ち、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度のいずれも所定の閾値より小さい場合、処理は終了する。なお、物体を検出していない場合、内外判定部22が、物体検出無しを表す物体検出信号を車両ECU2に供給するようにしてもよい。
【0065】
一方、ステップS7において、物体を検出したと判定された場合、処理はステップS8に進み、内外判定部22は、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度を比較して、検出された物体が車内に存在するか、または車外に存在するかを判定する。
【0066】
即ち、ステップS7では、内外判定部22は、狭指向性アンテナ13aのドップラ信号の信号強度が広指向性アンテナ13bのドップラ信号の信号強度よりも大きい場合には、検出された物体が車内に存在すると判定する。一方、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度よりも小さい場合には、内外判定部22は、検出された物体が車外に存在すると判定する。
【0067】
ステップS8で、検出された物体が車内に存在すると判定された場合、処理はステップS9に進み、内外判定部22は、車内の物体検出を表す物体検出信号を、車両ECU2に供給する。車両ECU2の駆動制御部31は、物体検出信号に基づいて、警報を動作させる。例えば、駆動制御部31は、ブザー3を鳴動させ、処理を終了する。ブザー3は、鳴動を継続する。
【0068】
一方、ステップS8で、検出された物体が車外に存在すると判定された場合、処理はステップS10に進み、内外判定部22は、車外の物体検出を表す物体検出信号を、車両ECU2に供給する。車両ECU2の駆動制御部31は、駆動制御部31は、物体検出信号に基づいて、パッシブエントリシステム認証部32に認証処理を実行させる。
【0069】
ステップS11において、駆動制御部31は、認証処理が成功したかを判定する。ステップS11で認証処理が成功したと判定された場合、ステップS12において、駆動制御部31は、ウェルカム動作を実行させ、処理を終了する。この処理により、例えば、ルームライト4およびフットライト5が点灯され、ドアが開錠される。
【0070】
一方、ステップS11で認証処理が成功しなかったと判定された場合、処理は終了する。
【0071】
以上のように、物体検出装置1は、狭指向性アンテナ13aのドップラ信号の信号強度と、広指向性アンテナ13bのドップラ信号の信号強度の比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかを判定することができる。
【0072】
従って、狭指向性アンテナ13aまたは広指向性アンテナ13bいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを正確に判別することができる。
【0073】
そして、検出した物体が車内にある場合には、不正な侵入者を検出したものとして、警報を発することで、自動車の盗難等を防止することができる。
【0074】
一方、検出した物体が車外にある場合には、認証処理を開始させることができるので、判定結果を認証処理のトリガとして利用することができ、運転者(自動車の所有者)であると認証された場合に、ルームライト4およびフットライト5の点灯やドアの開錠等を行うことにより、運転者の操作性や快適性を向上させることができる。
【0075】
また、従来の特許文献1で提案される技術のように、電波センサと超音波センサの2つのセンサは不要であり、1つの電波センサがあればよいため、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。これにより、物体検出装置1の製造コストを低減させることができる。
【0076】
なお、図5の物体検出処理において、狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出の順序は、逆であってもよい。
【0077】
また、図5の物体検出処理によれば、狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出を必ず行うことになるが、狭指向性アンテナ13aによるドップラ信号の信号強度によって、明らかに車内の物体が検出されたと判定できる場合には、広指向性アンテナ13bによるドップラ信号の検出を省略し、車内の物体の検出を表す物体検出信号を駆動制御部31に出力するようにしてもよい。また、広指向性アンテナ13bによるドップラ信号の検出を最初に行っている場合には、明らかに車外の物体が検出されたと判定できる場合には、狭指向性アンテナ13aによるドップラ信号の検出を省略し、車外の物体の検出を表す物体検出信号を駆動制御部31に出力するようにしてもよい。狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出のいずれを先に行うかは、車内の物体(侵入者)を検出したいのか、車外の物体(運転者)を検出したいのか等の目的によって決定することができる。
【0078】
なお、物体検出装置1の信号処理部12は、車両ECU2の一部として構成することも可能である。
【0079】
本明細書において、フローチャートに記述されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0080】
本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【0081】
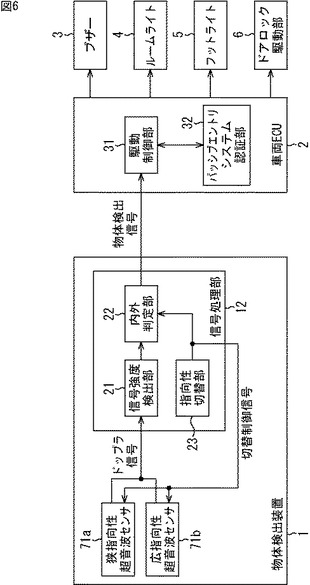
図6は、本発明を適用した自動車のその他の実施の形態の構成例を示している。
【0082】
図6において、上述した実施の形態と対応する部分については同一の符号を付してあり、その説明は省略する。
【0083】
即ち、図6に示される実施の形態では、電波センサ11に代えて、狭指向性超音波センサ71aと広指向性超音波アンテナ71bが設けられている点が、図1と異なる。
【0084】
狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、所定の周波数の信号(超音波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信する。そして、狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から、物体を検出するドップラ信号を出力信号として出力する。
【0085】
狭指向性超音波センサ71aと広指向性超音波アンテナ71bとは、例えばホーン形状が異なることにより、上述した図2の放射範囲41aと放射範囲41bのように、指向性が異なる。即ち、狭指向性超音波センサ71aの指向性が、図2の放射範囲41aに対応する。一方、広指向性超音波アンテナ71bの指向性が、図2の放射範囲41bに対応する。狭指向性超音波センサ71aと広指向性超音波アンテナ71bも、例えば、電波センサ11と同様に、マップランプ内に取り付けることができる。
【0086】
狭指向性超音波センサ71aと広指向性超音波アンテナ71bは、指向性切替部23から出力される切替制御信号によって、駆動が制御される。即ち、狭指向性超音波センサ71aは、指向性切替部23から、狭角を指示する切替制御信号が供給された場合、所定の周波数の信号(超音波)を送信し、対象物体からの反射波を受信する。広指向性超音波アンテナ71bは、広角を指示する切替制御信号が供給された場合、所定の周波数の信号(超音波)を送信し、対象物体からの反射波を受信する。
【0087】
狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、例えば、送信信号となる所定の周波数の信号を生成する発振回路、所定の周波数で駆動される圧電セラミックによって送信される送信信号、対象物体からの反射波を受信する圧電セラミックが受信した受信信号と送信信号とを乗算する乗算回路、乗算後の信号をローパス(Low Pass)処理するローパスフィルタ、ローパス処理して得られるドップラ信号を増幅して出力するアンプ等により構成される。
【0088】
信号処理部12は、狭指向性超音波センサ71aと広指向性超音波アンテナ71bのそれぞれから得られたドップラ信号の信号強度を比較することにより、電波センサ11における場合と同様に、検出された物体が車内にいるか、または車外にいるかを判定することができる。
【0089】
従って、図6の物体検出装置1によっても、電波センサと超音波センサの2つのセンサは不要であり、超音波センサのみがあればよいため、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。これにより、物体検出装置1の製造コストを低減させることができる。
【符号の説明】
【0090】
1 物体検出装置
11 電波センサ
12 信号処理部
13a 狭指向性アンテナ
13b 広指向性アンテナ
21 信号強度検出部
22 内外判定部
23 指向性切替部
31 駆動制御部
32 パッシブエントリシステム認証部
71a 狭指向性超音波アンテナ
71b 広指向性超音波アンテナ
【技術分野】
【0001】
本発明は、車載装置およびその制御方法に関し、特に、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができるようにする車載装置およびその制御方法に関する。
【背景技術】
【0002】
自動車には、自動車そのものの盗難や、車内の装備の盗難等を防止するため、不審者の侵入を検出するセキュリティシステムを備えるものがある。
【0003】
セキュリティシステムの車内への不審者の侵入を検出するセンサには、例えば、電波式の検出センサ(以下、単に、電波センサと称する)が用いられる。電波センサは、所定の周波数の信号(電波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信して、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から物体を検出する、ドップラ効果を利用したセンサである。
【0004】
上述の電波センサにおいて、受信信号の振幅(信号強度)は、検出対象の物体の大きさに比例し、物体までの距離に反比例する。すなわち、検出対象の物体が大きいほど、受信信号の振幅は大きくなり、検出対象の物体までの距離が近いほど、受信信号の振幅は大きくなる。そのため、大きくて遠くにある物体と、小さくて近くにある物体とで、信号強度が同等のレベルとなることがある。また、電波は、自動車の窓を通して車外へも漏洩し、電波センサは、車外の物体に反射した信号も受信する。これにより、検出された物体が車内の物体であるのか、または車外の物体であるのかを判別するのが困難な場合があった。英国の保険会社が規定する要件で言えば、車室内に挿入される面積の小さい金属片と、車室外で動く面積の大きい金属片とを判別するのが難しいという問題があった。
【0005】
この問題に対し、例えば、電波センサと超音波センサの2つのセンサを用いることで、物体が車内の物体であるのか、または車外の物体であるのかを確実に識別しようとする技術などが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−123728号公報(図1)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献1で提案される方式では、電波センサ以外の超音波センサと、それに対応する信号処理回路も必要となるため、信号処理も複雑となり、製造コストも増大する。
【0008】
本発明は、このような状況に鑑みてなされたものであり、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができるようにするものである。
【課題を解決するための手段】
【0009】
本発明の車載装置は、自動車に搭載され、所定の物体を検出する車載装置において、アンテナの指向性を狭角と広角に切り替え可能な電波センサと、前記電波センサの前記アンテナの指向性の切り替えを制御する切替制御手段と、前記電波センサからの出力信号の信号強度を検出する検出手段と、狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段とを備える。
【0010】
本発明の車載装置においては、電波センサのアンテナの指向性の切り替えが制御され、狭角の指向性で電波を出力したときの信号強度と、広角の指向性で電波を出力したときの信号強度とが検出され、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0011】
これにより、狭角または広角のいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0012】
前記電波センサは、例えば、複数のパッチアンテナを有する電波センサにより構成される。前記切替制御手段は、例えば、指向性切替部により構成され、前記検出手段は、例えば、信号強度検出部により構成され、前記判定手段は、内外判定部により構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【0013】
前記判定手段には、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より小さいとき、検出された前記物体が車外に存在すると判定させることができる。これにより、検出した物体が車外にあることを簡単な構成で判別することができる。
【0014】
前記判定手段により、検出された前記物体が車外に存在すると判定された場合、検出された前記物体が前記自動車の運転者であるかを認証する認証処理を開始させる認証制御手段をさらに備えることができる。これにより、運転者が有する携帯機が正当なものであると判定された場合には、自分の自動車に近づいてきた運転者に対して、自動的にドアが開錠され、フットライトが自動点灯される等の所謂ウェルカム動作を行うことができ、運転者の操作性や快適性が向上する。認証制御手段は、例えば、駆動制御部により構成される。
【0015】
前記判定手段には、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より大きいとき、検出された前記物体が車内に存在すると判定させることができる。これにより、不正な侵入者を検出し、警報を発することができる。
【0016】
本発明の車載装置の制御方法は、アンテナの指向性を狭角と広角に切り替え可能な電波センサを有する車載装置の制御方法において、狭角と広角のそれぞれに指向性を切り替えて、前記電波センサからの出力信号の信号強度を検出し、狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する。
【0017】
本発明の車載装置の制御方法においては、狭角と広角のそれぞれに指向性を切り替えて、電波センサからの出力信号の信号強度が検出され、狭角の指向性で電波を出力したときの信号強度と、広角の指向性で電波を出力したときの信号強度との比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0018】
これにより、狭角または広角のいずれか一方による信号強度が同レベルである場合にも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0019】
この制御方法は、例えば、指向性切替部が、狭角または広角を指示する切替制御信号を電波センサに供給し、信号強度検出部が、電波センサが出力した信号の信号強度を検出し、内外判定部が、狭角の指向性で電波を出力したときに検出された信号強度と、広角の指向性で電波を出力したときに検出された信号強度とを比較して、物体が車内にいるか、または車外にいるかを判定するステップにより構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【0020】
本発明の車載装置は、自動車に搭載され、所定の物体を検出する車載装置において、狭角の指向性を有する狭角超音波センサと、広角の指向性を有する広角超音波センサと、前記狭角超音波センサと前記広角超音波センサの駆動の切り替えを制御する切替制御手段と、前記狭角超音波センサと前記広角超音波センサのからの出力信号の信号強度を検出する検出手段と、前記狭角超音波センサから超音波を出力したときの前記信号強度と、前記広角超音波センサから超音波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段とを備える。
【0021】
本発明の車載装置においては、狭角超音波センサと広角超音波センサの駆動の切り替えが制御され、狭角超音波センサから超音波を出力したときの信号強度と、広角超音波センサから超音波を出力したときの信号強度とが検出され、その比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかが判定される。
【0022】
これにより、狭角または広角のいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを判別することができる。また、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【0023】
前記狭角超音波センサと広角超音波センサは、例えば、ホーン形状が異なる超音波センサにより構成される。前記切替制御手段は、例えば、指向性切替部により構成され、前記検出手段は、例えば、信号強度検出部により構成され、前記判定手段は、内外判定部により構成される。この指向性切替部、信号強度検出部、および内外判定部は、例えば、CPU,ROM,RAM,ASICなどを備える信号処理部により構成される。
【発明の効果】
【0024】
本発明によれば、検出した物体が車内または車外のどちらにあるかを判別することができる。また、本発明によれば、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。
【図面の簡単な説明】
【0025】
【図1】本発明を適用した自動車の一実施の形態の構成例を示すブロック図である。
【図2】電波センサの指向性を示す図である。
【図3】物体の車内と車外の判別方法について説明する図である。
【図4】物体の車内と車外の判別方法について説明する図である。
【図5】物体検出処理を説明するフローチャートである。
【図6】本発明を適用した自動車のその他の実施の形態の構成例を示すブロック図である。
【発明を実施するための形態】
【0026】
図1は、本発明を適用した自動車の一実施の形態の構成例を示している。
【0027】
図1の自動車は、物体検出の有無を表す物体検出信号を出力する物体検出装置1と、物体検出装置1からの物体検出信号に基づいて、自動車のブザー3、ルームライト4、フットライト5、およびドアロック駆動部6を制御する車両ECU(Electronic Control Unit)2とを有する。
【0028】
車載装置としての物体検出装置1は、電波センサ11と、電波センサ11からの出力信号を処理する信号処理部12とから構成される。信号処理部12は、信号強度検出部21、内外判定部22、および指向性切替部23により構成される。
【0029】
電波センサ11は、所定の周波数の信号(電波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信する。そして、電波センサ11は、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から、物体を検出するドップラ信号を出力信号として出力する。
【0030】
電波センサ11は、狭角の指向性を有するアンテナ13aと、広角の指向性を有するアンテナ13bを有している。なお、以下において、アンテナ13aを狭指向性アンテナ13a、アンテナ13bを広指向性アンテナ13bと称する。電波センサ11は、信号処理部12から供給される切替制御信号により狭角が指示された場合には、狭指向性アンテナ13aから信号(電波)を送信し、広角が指示された場合には、広指向性アンテナ13bから信号(電波)を送信する。電波センサ11は、電波を送信した狭指向性アンテナ13aまたは広指向性アンテナ13bと同一のアンテナで、所定の物体に反射して返ってくる信号を受信する。
【0031】
電波センサ11は、例えば、送信信号となる所定の周波数の信号を生成する発振回路、アンテナ13aまたはアンテナ13bが受信した受信信号と送信信号とを乗算する乗算回路、乗算後の信号をローパス(Low Pass)処理するローパスフィルタ、ローパス処理して得られるドップラ信号を増幅して出力するアンプ等により構成される。
【0032】
なお、狭指向性アンテナ13aと広指向性アンテナ13bは、それぞれ独立したアンテナとして設けてもよいし、その一部または全部を共用するものでもよい。例えば、電波センサ11は、所定の位置に配列された4つのパッチアンテナを有し、高周波スイッチ等を用いて給電の有無を切り替えることにより、2つのパッチアンテナを使用する場合と、4つのパッチアンテナを使用する場合とを切り替える。4つのパッチアンテナを用いた場合、狭指向性アンテナ13aとして動作させることができ、2つのパッチアンテナを用いた場合、広指向性アンテナ13bとして動作させることができる。
【0033】
例えば、狭指向性アンテナ13aの指向性は、図2の放射範囲41aで示される。また、広指向性アンテナ13bの指向性は、図2の放射範囲41bで示される。図2において、電波センサ11は、例えば、図示せぬマップランプ内に取り付けられている。
【0034】
信号処理部12の信号強度検出部21は、電波センサ11から供給されるドップラ信号の信号強度(振幅)を検出し、その検出結果を内外判定部22に供給する。
【0035】
内外判定部22には、狭指向性アンテナ13aおよび広指向性13bそれぞれで受信して得られたドップラ信号の信号強度が、信号強度検出部21から供給される。内外判定部22は、指向性切替部23から供給される切替制御信号が狭角を示している場合、信号強度検出部21から供給される信号強度が、狭指向性アンテナ13aで受信した受信信号に対応するドップラ信号の信号強度(以下、適宜、狭指向性アンテナ13aのドップラ信号と称する)であると認識する。一方、指向性切替部23から供給される切替制御信号が広角を示している場合、内外判定部22は、信号強度検出部21から供給される信号強度が、広指向性アンテナ13bで受信した受信信号に対応するドップラ信号の信号強度(以下、適宜、広指向性アンテナ13bのドップラ信号)であると認識する。
【0036】
内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを比較して、検出された物体が車内にいるか、または車外にいるかを判定する。内外判定部22は、判定結果としての車内または車外のいずれかを表す信号を、物体検出信号として、車両ECU2に供給する。なお、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを用いて、検出された物体が車内にいるか、または車外にいるかをどのように判定するかについては、図3および図4を参照して後述する。
【0037】
指向性切替部23は、電波センサ11の狭指向性アンテナ13aと広指向性アンテナ13bの切替を制御する。指向性切替部23は、狭角または広角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0038】
信号処理部12は、例えば、CPU(Central Processing Unit),ROM(Read Only Memory),RAM(Random Access Memory)やASIC (Application Specific Integrated Circuit)などで構成することができる。
【0039】
車両ECU2は、駆動制御部31とパッシブエントリシステム認証部32を少なくとも有する。
【0040】
駆動制御部31は、物体検出信号が車内の物体を検出したことを表している場合、検出した物体が不正な侵入者である可能性が高いので、ブザー3を鳴動させ、警報を発する。一方、駆動制御部31は、物体検出信号が車外の物体を検出したことを表している場合、
検出された物体が自動車の所有者(運転者)であるかを判定するため、パッシブエントリシステム認証部32に認証処理を実行させる。そして、駆動制御部31は、パッシブエントリシステム認証部32から、自動車の所有者であることを示す情報が供給された場合、ルームライト4およびフットライト5を点灯させ、ドアを開錠させる制御信号をドアロック駆動部6に供給する。
【0041】
パッシブエントリシステム認証部32は、自動車の所有者が有する携帯機(図示せず)と無線通信を行い、携帯機から送信されてくる識別IDが、内部に記憶している識別IDと一致するか否かにより、運転者であるか否かを認証する。運転者であると判定された場合には、パッシブエントリシステム認証部32は、運転者であることを示す情報を供給駆動制御部31に供給する。例えば、検出された物体が自動車の周辺を通り抜ける人(通行人)である場合には、認証処理は成功しないので、運転者であることを示す情報は供給駆動制御部31に供給されず、ルームライト4の点灯やドアの開錠等は行われない。
【0042】
以上のような構成を有する自動車においては、狭指向性アンテナ13aのドップラ信号の信号強度と、広指向性アンテナ13bのドップラ信号の信号強度とを用いて、検出された物体が車内に存在するか、または車外に存在するかが判定される。そして、車内の物体が検出された場合には、警報としてのブザー3が鳴動する。これにより、不正な侵入者を検出し、警報を発することができる。
【0043】
一方、車外の物体が検出された場合には、運転者であるかの認証処理が行われ、運転者であると認定された場合、ルームライト4およびフットライト5の点灯やドアの開錠等の所謂ウェルカム動作が行われる。これにより、運転者の操作性や快適性を向上させることができる。
【0044】
次に、図3および図4を参照して、検出された物体が車内に存在するか、または車外に存在するかの判別方法について説明する。
【0045】
いま検出対象の物体として所定のサイズXLの金属片が車内と車外とにある場合を想定し、従来のように、1種類の指向性のアンテナのみで検出するものとする。
【0046】
例えば、1種類の指向性のアンテナとしての、狭指向性アンテナ13aで、車内と車外のそれぞれにあるサイズXLの金属片を検出した場合、検出されるドップラ信号の信号強度は、図3のグラフ51aに示されるようになる。
【0047】
即ち、同一サイズXLの金属片では、車内の金属片の方が距離が近くなるため、狭指向性アンテナ13aのドップラ信号の信号強度がより大となる。このような同一サイズXLの物体の検出では、車内と車外に明らかに信号強度に差が生じるので、問題は生じない。
【0048】
しかしながら、車内において検出する金属片のサイズを、サイズXLよりも徐々に小さくすると、図3のグラフ51bに示されるように、車外でサイズXLの金属片を検出したときと同一の信号強度となるサイズXSが存在する。このような場合、1種類の指向性のアンテナ(狭指向性アンテナ13a)のみで、車内の物体を検出することが難しい。即ち、1種類の指向性のアンテナでは、物体が車内に存在する場合と車外に存在する場合の両方が考えられる状況が存在する。また、信号強度が完全に同一でなくても、信号の感度の違い(製造誤差)、マージン等を考慮すると、所定の範囲で、同様の状況が発生する。
【0049】
そこで、車内ではサイズXSの金属片を検出し、車外では、それより大きいサイズXLの金属片を検出する同一の条件で、広指向性アンテナ13bにより受信すると、広指向性アンテナ13bのドップラ信号の信号強度は、図3のグラフ51cに示されるようになる。
【0050】
広指向性アンテナ13bでは、狭指向性アンテナ13aよりも信号出力(電力)が弱まるので、車内のサイズXSの金属片を検出したドップラ信号の信号強度は、狭指向性アンテナ13aにおける場合よりも小さくなる。反対に、車外の位置では、狭指向性アンテナ13aよりも信号出力が強まるので、サイズXLの金属片を検出したドップラ信号の信号強度は狭指向性アンテナ13aにおける場合よりも大きくなる。
【0051】
図3のグラフ51bとグラフ51cの信号強度を車内と車外とで整理すると、図4に示されるようになる。
【0052】
即ち、狭指向性アンテナ13aのドップラ信号だけでは、車内か車外か判別するのが難しい場合でも、検出された物体(金属片)が車内にある場合には、図4のグラフ61aに示されるように、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度より大きいという関係が得られる。
【0053】
また、検出された物体(金属片)が車外にある場合には、図4のグラフ61bに示されるように、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度より小さいという関係が得られる。
【0054】
従って、内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度とを比較して、グラフ61aに示される関係がある場合には、検出された物体が車内にあると判定する。一方、内外判定部22は、広指向性アンテナ13bのドップラ信号の信号強度と、狭指向性アンテナ13aのドップラ信号の信号強度との間に、グラフ61bに示される関係がある場合には、検出された物体が車外にあると判定する。
【0055】
これにより、検出した物体が車内または車外のどちらにあるかを正確に判別することができる。
【0056】
次に、図5のフローチャートを参照して、図1の自動車における物体検出処理について説明する。例えば、この処理は、運転者が自動車のドアをロックしてから所定時間が経過したとき、又は、運転者が自動車から一定距離以上離れたときに、開始することができる。
【0057】
初めに、ステップS1において、信号処理部12の指向性切替部23は、狭角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0058】
ステップS2において、電波センサ11は、狭角を指示する切替制御信号に基づいて、狭指向性アンテナ13aのドップラ信号を信号強度検出部21に供給する。即ち、電波センサ11は、狭指向性アンテナ13aから信号(電波)を出力し、所定の物体に反射して返ってくる信号(電波)を受信する。さらに、電波センサ11は、送信信号と受信信号の差分信号をローパス(Low Pass)処理して得られるドップラ信号を、必要に応じて増幅し、信号強度検出部21に供給する。
【0059】
ステップS3において、信号強度検出部21は、電波センサ11から供給されるドップラ信号の信号強度を検出し、その検出結果を内外判定部22に供給する。
【0060】
ステップS4において、信号処理部12の指向性切替部23は、広角を指示する切替制御信号を電波センサ11および内外判定部22に供給する。
【0061】
ステップS5において、電波センサ11は、広角を指示する切替制御信号に基づいて、広指向性アンテナ13bのドップラ信号を信号強度検出部21に供給する。この処理は、上述したステップS2の処理と同様である。
【0062】
ステップS6において、信号強度検出部21は、広指向性アンテナ13bのドップラ信号の信号強度を検出し、その検出結果を内外判定部22に供給する。この処理は、上述したステップS3の処理と同様である。
【0063】
ステップS7において、内外判定部22は、物体を検出したかを判定する。即ち、内外判定部22は、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度の少なくともいずれか一方が物体検出を判別する所定の閾値以上であるかを判定する。
【0064】
ステップS7において、物体を検出していないと判定された場合、即ち、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度のいずれも所定の閾値より小さい場合、処理は終了する。なお、物体を検出していない場合、内外判定部22が、物体検出無しを表す物体検出信号を車両ECU2に供給するようにしてもよい。
【0065】
一方、ステップS7において、物体を検出したと判定された場合、処理はステップS8に進み、内外判定部22は、狭指向性アンテナ13aと広指向性アンテナ13bのドップラ信号の信号強度を比較して、検出された物体が車内に存在するか、または車外に存在するかを判定する。
【0066】
即ち、ステップS7では、内外判定部22は、狭指向性アンテナ13aのドップラ信号の信号強度が広指向性アンテナ13bのドップラ信号の信号強度よりも大きい場合には、検出された物体が車内に存在すると判定する。一方、狭指向性アンテナ13aのドップラ信号の信号強度が、広指向性アンテナ13bのドップラ信号の信号強度よりも小さい場合には、内外判定部22は、検出された物体が車外に存在すると判定する。
【0067】
ステップS8で、検出された物体が車内に存在すると判定された場合、処理はステップS9に進み、内外判定部22は、車内の物体検出を表す物体検出信号を、車両ECU2に供給する。車両ECU2の駆動制御部31は、物体検出信号に基づいて、警報を動作させる。例えば、駆動制御部31は、ブザー3を鳴動させ、処理を終了する。ブザー3は、鳴動を継続する。
【0068】
一方、ステップS8で、検出された物体が車外に存在すると判定された場合、処理はステップS10に進み、内外判定部22は、車外の物体検出を表す物体検出信号を、車両ECU2に供給する。車両ECU2の駆動制御部31は、駆動制御部31は、物体検出信号に基づいて、パッシブエントリシステム認証部32に認証処理を実行させる。
【0069】
ステップS11において、駆動制御部31は、認証処理が成功したかを判定する。ステップS11で認証処理が成功したと判定された場合、ステップS12において、駆動制御部31は、ウェルカム動作を実行させ、処理を終了する。この処理により、例えば、ルームライト4およびフットライト5が点灯され、ドアが開錠される。
【0070】
一方、ステップS11で認証処理が成功しなかったと判定された場合、処理は終了する。
【0071】
以上のように、物体検出装置1は、狭指向性アンテナ13aのドップラ信号の信号強度と、広指向性アンテナ13bのドップラ信号の信号強度の比較結果に基づいて、検出された物体が車内または車外のどちらに存在するかを判定することができる。
【0072】
従って、狭指向性アンテナ13aまたは広指向性アンテナ13bいずれか一方では、信号強度が車内と車外で同レベルとなるような場合でも、検出した物体が車内または車外のどちらにあるかを正確に判別することができる。
【0073】
そして、検出した物体が車内にある場合には、不正な侵入者を検出したものとして、警報を発することで、自動車の盗難等を防止することができる。
【0074】
一方、検出した物体が車外にある場合には、認証処理を開始させることができるので、判定結果を認証処理のトリガとして利用することができ、運転者(自動車の所有者)であると認証された場合に、ルームライト4およびフットライト5の点灯やドアの開錠等を行うことにより、運転者の操作性や快適性を向上させることができる。
【0075】
また、従来の特許文献1で提案される技術のように、電波センサと超音波センサの2つのセンサは不要であり、1つの電波センサがあればよいため、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。これにより、物体検出装置1の製造コストを低減させることができる。
【0076】
なお、図5の物体検出処理において、狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出の順序は、逆であってもよい。
【0077】
また、図5の物体検出処理によれば、狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出を必ず行うことになるが、狭指向性アンテナ13aによるドップラ信号の信号強度によって、明らかに車内の物体が検出されたと判定できる場合には、広指向性アンテナ13bによるドップラ信号の検出を省略し、車内の物体の検出を表す物体検出信号を駆動制御部31に出力するようにしてもよい。また、広指向性アンテナ13bによるドップラ信号の検出を最初に行っている場合には、明らかに車外の物体が検出されたと判定できる場合には、狭指向性アンテナ13aによるドップラ信号の検出を省略し、車外の物体の検出を表す物体検出信号を駆動制御部31に出力するようにしてもよい。狭指向性アンテナ13aによるドップラ信号の検出と、広指向性アンテナ13bによるドップラ信号の検出のいずれを先に行うかは、車内の物体(侵入者)を検出したいのか、車外の物体(運転者)を検出したいのか等の目的によって決定することができる。
【0078】
なお、物体検出装置1の信号処理部12は、車両ECU2の一部として構成することも可能である。
【0079】
本明細書において、フローチャートに記述されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0080】
本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【0081】
図6は、本発明を適用した自動車のその他の実施の形態の構成例を示している。
【0082】
図6において、上述した実施の形態と対応する部分については同一の符号を付してあり、その説明は省略する。
【0083】
即ち、図6に示される実施の形態では、電波センサ11に代えて、狭指向性超音波センサ71aと広指向性超音波アンテナ71bが設けられている点が、図1と異なる。
【0084】
狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、所定の周波数の信号(超音波)を送信し、その信号が所定の物体に反射して返ってくる信号を受信する。そして、狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、受信した信号(受信信号)と送信した信号(送信信号)の周波数の差から、物体を検出するドップラ信号を出力信号として出力する。
【0085】
狭指向性超音波センサ71aと広指向性超音波アンテナ71bとは、例えばホーン形状が異なることにより、上述した図2の放射範囲41aと放射範囲41bのように、指向性が異なる。即ち、狭指向性超音波センサ71aの指向性が、図2の放射範囲41aに対応する。一方、広指向性超音波アンテナ71bの指向性が、図2の放射範囲41bに対応する。狭指向性超音波センサ71aと広指向性超音波アンテナ71bも、例えば、電波センサ11と同様に、マップランプ内に取り付けることができる。
【0086】
狭指向性超音波センサ71aと広指向性超音波アンテナ71bは、指向性切替部23から出力される切替制御信号によって、駆動が制御される。即ち、狭指向性超音波センサ71aは、指向性切替部23から、狭角を指示する切替制御信号が供給された場合、所定の周波数の信号(超音波)を送信し、対象物体からの反射波を受信する。広指向性超音波アンテナ71bは、広角を指示する切替制御信号が供給された場合、所定の周波数の信号(超音波)を送信し、対象物体からの反射波を受信する。
【0087】
狭指向性超音波センサ71aおよび広指向性超音波アンテナ71bは、例えば、送信信号となる所定の周波数の信号を生成する発振回路、所定の周波数で駆動される圧電セラミックによって送信される送信信号、対象物体からの反射波を受信する圧電セラミックが受信した受信信号と送信信号とを乗算する乗算回路、乗算後の信号をローパス(Low Pass)処理するローパスフィルタ、ローパス処理して得られるドップラ信号を増幅して出力するアンプ等により構成される。
【0088】
信号処理部12は、狭指向性超音波センサ71aと広指向性超音波アンテナ71bのそれぞれから得られたドップラ信号の信号強度を比較することにより、電波センサ11における場合と同様に、検出された物体が車内にいるか、または車外にいるかを判定することができる。
【0089】
従って、図6の物体検出装置1によっても、電波センサと超音波センサの2つのセンサは不要であり、超音波センサのみがあればよいため、検出した物体が車内または車外のどちらにあるかを簡単な構成で判別することができる。これにより、物体検出装置1の製造コストを低減させることができる。
【符号の説明】
【0090】
1 物体検出装置
11 電波センサ
12 信号処理部
13a 狭指向性アンテナ
13b 広指向性アンテナ
21 信号強度検出部
22 内外判定部
23 指向性切替部
31 駆動制御部
32 パッシブエントリシステム認証部
71a 狭指向性超音波アンテナ
71b 広指向性超音波アンテナ
【特許請求の範囲】
【請求項1】
自動車に搭載され、所定の物体を検出する車載装置において、
アンテナの指向性を狭角と広角に切り替え可能な電波センサと、
前記電波センサの前記アンテナの指向性の切り替えを制御する切替制御手段と、
前記電波センサからの出力信号の信号強度を検出する検出手段と、
狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段と
を備える車載装置。
【請求項2】
前記判定手段は、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より小さいとき、検出された前記物体が車外に存在すると判定する
請求項1に記載の車載装置。
【請求項3】
前記判定手段により、検出された前記物体が車外に存在すると判定された場合、検出された前記物体が前記自動車の運転者であるかを認証する認証処理を開始させる認証制御手段をさらに備える
請求項2に記載の車載装置。
【請求項4】
前記判定手段は、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より大きいとき、検出された前記物体が車内に存在すると判定する
請求項1に記載の車載装置。
【請求項5】
アンテナの指向性を狭角と広角に切り替え可能な電波センサを有する車載装置の制御方法において、
狭角と広角のそれぞれに指向性を切り替えて、前記電波センサからの出力信号の信号強度を検出し、
狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する
車載装置の制御方法。
【請求項6】
自動車に搭載され、所定の物体を検出する車載装置において、
狭角の指向性を有する狭角超音波センサと、
広角の指向性を有する広角超音波センサと、
前記狭角超音波センサと前記広角超音波センサの駆動の切り替えを制御する切替制御手段と、
前記狭角超音波センサと前記広角超音波センサのからの出力信号の信号強度を検出する検出手段と、
前記狭角超音波センサから超音波を出力したときの前記信号強度と、前記広角超音波センサから超音波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段と
を備える車載装置。
【請求項1】
自動車に搭載され、所定の物体を検出する車載装置において、
アンテナの指向性を狭角と広角に切り替え可能な電波センサと、
前記電波センサの前記アンテナの指向性の切り替えを制御する切替制御手段と、
前記電波センサからの出力信号の信号強度を検出する検出手段と、
狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段と
を備える車載装置。
【請求項2】
前記判定手段は、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より小さいとき、検出された前記物体が車外に存在すると判定する
請求項1に記載の車載装置。
【請求項3】
前記判定手段により、検出された前記物体が車外に存在すると判定された場合、検出された前記物体が前記自動車の運転者であるかを認証する認証処理を開始させる認証制御手段をさらに備える
請求項2に記載の車載装置。
【請求項4】
前記判定手段は、狭角の指向性で電波を出力したときの前記信号強度が、広角の指向性で電波を出力したときの前記信号強度より大きいとき、検出された前記物体が車内に存在すると判定する
請求項1に記載の車載装置。
【請求項5】
アンテナの指向性を狭角と広角に切り替え可能な電波センサを有する車載装置の制御方法において、
狭角と広角のそれぞれに指向性を切り替えて、前記電波センサからの出力信号の信号強度を検出し、
狭角の指向性で電波を出力したときの前記信号強度と、広角の指向性で電波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する
車載装置の制御方法。
【請求項6】
自動車に搭載され、所定の物体を検出する車載装置において、
狭角の指向性を有する狭角超音波センサと、
広角の指向性を有する広角超音波センサと、
前記狭角超音波センサと前記広角超音波センサの駆動の切り替えを制御する切替制御手段と、
前記狭角超音波センサと前記広角超音波センサのからの出力信号の信号強度を検出する検出手段と、
前記狭角超音波センサから超音波を出力したときの前記信号強度と、前記広角超音波センサから超音波を出力したときの前記信号強度との比較結果に基づいて、検出された前記物体が車内または車外のどちらに存在するかを判定する判定手段と
を備える車載装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−188855(P2010−188855A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−35029(P2009−35029)
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000002945)オムロン株式会社 (3,542)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000002945)オムロン株式会社 (3,542)
[ Back to top ]