
車載装置の受付制御装置および受付制御方法
【課題】車載装置の入力制御において、安全性と利便性とを両立可能な技術を提供する。
【解決手段】着座位置毎に設けられた識別信号を生体通信を用いて操作者経由で受信することにより操作者の着座位置を特定するとともに、特定された着座位置の乗員の適格性を、距離画像により判別する。そして、車両の走行状態、操作者の適格性に応じて、入力を制限することにより、車載装置の操作を制御する。適格性の判別は、予め距離画像を用いて作成した着座位置毎の乗員の適格性を格納する適格性データベースを用いる。
【解決手段】着座位置毎に設けられた識別信号を生体通信を用いて操作者経由で受信することにより操作者の着座位置を特定するとともに、特定された着座位置の乗員の適格性を、距離画像により判別する。そして、車両の走行状態、操作者の適格性に応じて、入力を制限することにより、車載装置の操作を制御する。適格性の判別は、予め距離画像を用いて作成した着座位置毎の乗員の適格性を格納する適格性データベースを用いる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載装置の制御技術に関する。特に、カーナビゲーション装置等、車両の走行状態および操作者に応じて操作に制約のある装置の入力制御技術に関する。
【背景技術】
【0002】
車両に搭載されるオーディオ装置、カーナビゲーション装置等は、その多機能化に伴い、複雑な操作が要求されるようになっている。操作を行う際は、画面を注視しなければならないため、安全性を考慮して、走行中の操作は制限される。このような操作の制限は、車速センサ、ブレーキセンサなどの信号を利用して行われるため、操作者によらず、制限をうける。従って、安全性は充足されるが利便性は損なわれる。
【0003】
利便性の観点から、不要な制限を減らすため、ナビゲーション装置に位置検出センサを設け、操作者の着座方向を検出し、助手席側からの操作は受け入れるよう制御するものがある(例えば、特許文献1参照。)。また、タイマーで時間的に機能を制限するものがある(例えば、特許文献2参照。)。また、シート毎に付与された識別信号で判別するものがある(例えば、特許文献3参照。)。
【0004】
一方、運転者以外であっても、子供など、操作に不適格なものによる操作は、安全性の観点からは、制限を設けたほうがよい。これは、走行中、停止中といった車両の走行状態は問わない。乗員の体格等を識別するものとして、例えば、車内を撮影し、2次元画像(通常画像)と距離画像とを得、これらの画像により操作者の体格を判別するものがある(例えば、特許文献4参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平07−306055号公報
【特許文献2】特開2005−43064号公報
【特許文献3】特開平07−103778号公報
【特許文献4】特開2007−198929号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されている技術では、操作指示を受けた方向のみで操作者を判断するため、運転者が助手席側に腕を回して操作を行った場合は受け付けてしまう。また、センサの近傍に物体がある場合は操作者が正しく検出できない。特許文献2に開示されている技術では、制限時間外であれば、誰でも操作ができる。
【0007】
特許文献4に開示の技術では、通常画像と距離画像とを独立して取得するため、これらを対応づける構成が必要となる。そして、大掛かりな処理が必要となるにも関わらず、精度が良くない。従って、この特許文献4に開示されている技術を、特許文献3に開示されている技術に組み合わせたとしても、乗員の識別精度が低いため、操作者の適格性を適切に判断できない。従って、安全性と利便性とを両立できない。
【0008】
本発明は、上記事情に鑑みてなされたもので、車載装置の入力制御において、安全性と利便性とを両立可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、着座位置毎に設けられた識別信号を生体通信を用いて操作者経由で受信することにより操作者の着座位置を特定するとともに、特定された着座位置の乗員の適格性を、距離画像により判別する。そして、車両の走行状態、操作者の適格性に応じて、入力を制限することにより、車載装置の操作を制御する。適格性の判別は、予め距離画像を用いて作成した着座位置毎の乗員の適格性を格納する適格性データベースを用いる。
【0010】
具体的には、操作者からの操作に応じて処理を行う車載装置の操作の受付を制御する受付制御装置であって、当該車載機器が搭載される車両が走行中か否かを判別する走行状態判別手段と、生体通信を用いて操作者の着座位置を特定する操作者特定手段と、距離画像を取得する画像取得手段と、前記距離画像を用い、前記操作者特定手段が特定した着座位置の乗員の適格性を判別する適格性判別手段と、前記走行停止判別手段の判別結果と前記操作者特定手段の判別結果と前記適格性判別手段の判別結果とに応じ、操作の受付を制限する制限信号を出力する信号出力手段と、を備え、前記信号出力手段が制限信号を出力した場合、前記操作の受付を制限することを特徴とする受付制御装置を提供する。
【0011】
また、車載装置に対する操作者からの操作の受付を制限する車載装置の受付制御方法であって、操作があった場合、当該車両の走行状態を判別する走行状態判別ステップと、操作があった場合、操作者の着座位置を特定する操作者特定ステップと、前記操作者が運転者以外の場合、前記操作者の適格性を判別する適格性判別ステップと、前記走行状態判別ステップと、操作者特定ステップと、適格性判別ステップとの各結果に応じて、操作の受付を制限する受付制御ステップと、を備えることを特徴とする受付制御方法を提供する。
【発明の効果】
【0012】
本発明によれば、車載装置の入力制御において、安全性と利便性とを両立できる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態のナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の受付制御部の機能ブロック図である。
【図3】(a)、(b)は、本発明の実施形態の距離画像センサおよびナビゲーション装置の設置位置を説明するための説明図である。
【図4】本発明の実施形態の距離画像の一例を説明するための説明図である。
【図5】(a)は、本発明の実施形態の識別信号発生部の構成を説明するためのブロック図であり、(b)は、同識別信号受信部の構成を説明するためのブロック図である。
【図6】(a)、(b)は、生体通信の概要を説明するための説明図である。
【図7】本発明の実施形態の制限データベースを説明するための説明図である。
【図8】距離画像上の長さから実際の長さを算出する手法を説明するための説明図である。
【図9】(a)、(b)は、本発明の実施形態の後部座席乗員の座高算出手法を説明するための説明図である。
【図10】本発明の実施形態の適格性データベースの一例を説明するための説明図である。
【図11】本発明の実施形態の受付制御処理のフローチャートである。
【図12】(a)、(b)は、本発明の実施形態の制限データベースの他の例を説明するための説明図である。
【発明を実施するための形態】
【0014】
以下、本発明を適用する実施形態について説明する。以下、本発明の実施形態を説明するための全図において、同一機能を有するものは同一符号を付し、その繰り返しの説明は省略する。
【0015】
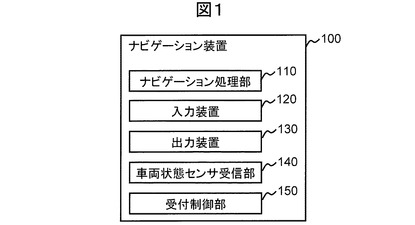
本実施形態の車載装置の全体構成について、ナビゲーション装置を例にあげて説明する。図1は、本実施形態のナビゲーション装置の概略構成図である。本実施形態のナビゲーション装置100は、ナビゲーション処理部110と、入力装置120と、出力装置130と、車両状態センサ受信部140と、受付制御部150と、を備える。
【0016】
入力装置120および出力装置130は、操作者とのインタフェースを構成する。入力装置120は、操作者からの操作を受け付け、出力装置130は、ナビゲーション装置100による処理結果を操作者に通知する。入力装置120は、操作ボタン、スイッチ、タッチパネル等であり、出力装置130は、表示装置、音声出力装置等がある。表示装置が入力装置120および出力装置130を兼ねてもよい。
【0017】
車両状態センサ受信部140は、車両に備えられる、車両の各種状態を検出する車両状態センサからの信号を受信する。車両状態センサとして、例えば、車両の速度を検出し、速度に応じた車速信号を出力する車速センサを備える。本実施形態では、車両状態センサ受信部140は、この車速センサから出力される車速信号を受信し、受付制御部150に出力する。
【0018】
ナビゲーション処理部110は、入力装置120を介して入力される操作者からの指示に従って、予め保持する地図データ等のナビゲーション用データ、車両状態センサ受信部140で受信したセンサ信号を用い、ナビゲーション処理を行い、結果を出力装置130に出力する。
【0019】
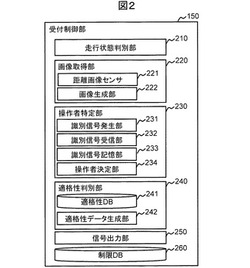
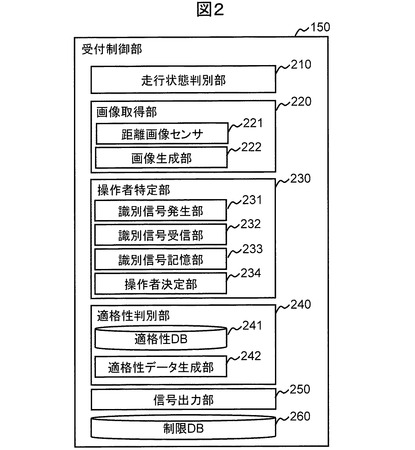
受付制御部150は、操作者および車両の走行状態に応じて、ナビゲーション装置100に対する操作の受け付けを制限する。受け付けの制限は、制限信号を出力することにより行う。図2は、本実施形態の受付制御部150の機能ブロック図である。本実施形態の受付制御部150は、受付の制限を実現するため、図2に示すように、走行状態判別部210と、画像取得部220と、操作者特定部230と、適格性判別部240と、信号出力部250とを備える。受付制御部150は、これらの各部の動作を制御し、条件に応じて制限信号を出力する。また、制限信号を出力する条件(ルール)は、制限データベース(制限DB)260として予め保持される。
【0020】
走行状態判別部210は、車両状態センサ受信部140から受信した車速信号に基づき、ナビゲーション装置100が搭載されている車両が走行状態であるか、停止状態であるかを判別する。そして、判別結果として、車速が0の場合、停止を意味する停止信号を、それ以外の場合、走行中であることを意味する走行信号を、それぞれ車速情報として出力する。
【0021】
画像取得部220は、距離画像センサ221と画像生成部222とを備え、車両内の画像を取得する。本実施形態では、画像として距離画像を取得する。
【0022】
本実施形態の距離画像センサ221は、光飛行型距離画像センサで照射した変調光が対象物に反射することによる反射光を含む入射光を、画素毎に設けられた複数の電荷蓄積部に蓄積する。距離画像センサ221は、ナビゲーション装置100の入力装置120および車両内の全乗員の画像を取得可能な位置に配置される。例えば、図3に示すように、ルームミラー上に配置される。ここで、図3(a)は、距離画像センサ221が車両内に配置される位置を説明するためのイメージ図であり、図3(b)は、乗員500と距離画像センサ221との関係を説明するための図である。
【0023】
画像生成部222は、距離画像センサ221の電荷蓄積部に蓄積された電荷を所定時間毎に読出し、距離画像を生成する。図4は、本実施形態の画像生成部222が生成する距離画像の一例である。
【0024】
ここで、本実施形態の距離画像センサ221と画像生成部222とによる距離画像生成手法について簡単に説明する。
【0025】
本実施形態の距離画像センサ221は、対象空間に変調光を照射する光源と、光源から照射された変調光の反射光を含む入射光を受光し、電荷に変換する受光部とを備える。受光部は、受光量を電荷量に変換する光電変換素子が、距離画像の画素に対応づけて配列される。各光電変換素子で得られた電荷は、各光電変換素子が備える4つの電荷蓄積部に、変調の1周期を4等分した期間(例えば、0度から90度の間、90度から180度の間、180度から270度の間、270度から0度の間)毎に振り分けられ、蓄積される。
【0026】
本実施形態の画像生成部222は、所定の時間Δt毎に、4つの電荷蓄積部に蓄積された電荷量(順にC1、C2、C3、C4とする。)を用い、各画素の距離値Dを算出する。距離値Dは、まず、以下の式(1)に従って、位相差φを算出し、その位相差φを用い、以下の式(2)に従って算出する。
φ=tan−1((C1-C3)/(C2-C4)) (1)
D=φ/2π×c/2f (2)
ここで、cは光の速度、fは変調周波数である。以上により、画像取得部220は、Δt毎に距離画像を取得する。
【0027】
操作者特定部230は、人体を通じて信号を伝送する生体通信を用い、操作の有無、および、操作があった場合、その操作者の着座位置を特定する。これを実現するため、操作者特定部230は、識別信号発生部231と識別信号受信部232と識別信号記憶部233と操作者決定部234とを備える。
【0028】
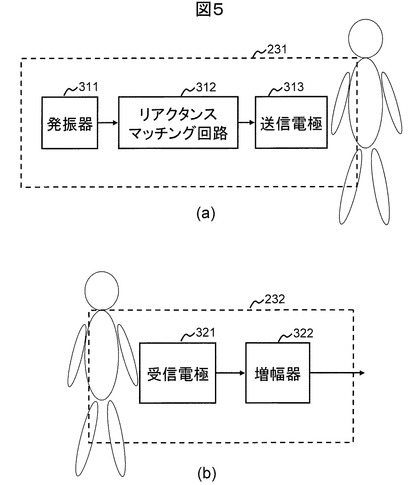
識別信号発生部231は、人体を経由可能な識別信号を発生するもので、各乗員の座席位置を判別可能な位置、例えば、座席の座面に配置される。図5(a)は、本実施形態の識別信号発生部231の回路構成を説明するための図である。本図に示すように、識別信号発生部231は、発振器311と、リアクタンスマッチング回路312と、送信電極313とを備える。発振器311は、座席毎に予め定めた異なる周波数の識別信号を発生させる。発振器311で生成された識別信号は、リアクタンスマッチング回路312を経て送信電極313から送信される。発振器311は、エンジンがONになったことを契機として識別信号の発生を開始する。
【0029】
識別信号受信部232は、操作者がナビゲーション装置100の入力装置120に触れた際、識別信号発生部231が発生した識別信号を人体経由で受信する。識別信号受信部232は、ナビゲーション装置100の入力装置120に配置される。図5(b)は、本実施形態の識別信号受信部232の回路構成を説明するための図である。本図に示すように、識別信号受信部232は、受信電極321と増幅器322とを備える。受信電極321で識別信号を受信し、受信した識別信号を増幅器323で増幅し、出力する。
【0030】
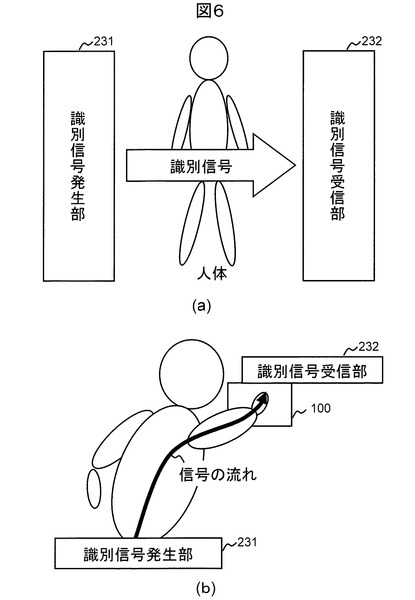
図6は、識別信号発生部231と識別信号受信部232との間の生体通信の概要を説明するための図である。図6(a)および(b)に示すように、操作者(人体)が入力装置120に触れると、識別信号発生部231で生成された識別信号が、人体を介して識別信号受信部232に送信される。
【0031】
識別信号記憶部233には、着座位置毎の発信周波数が保持される。着座位置毎の発信周波数は予め登録され、保持される。
【0032】
操作者決定部234は、識別信号受信部232で受信した識別信号の発信元の着座位置を特定し、入力装置120に触れた操作者の着座位置を特定する。操作者の特定は、識別信号受信部232で受信した識別信号の周波数から、識別信号記憶部233を参照することにより行う。そして、操作者の着座位置を特定する情報を操作者情報として出力する。
【0033】
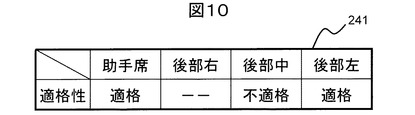
適格性判別部240は、操作者特定部230の出力が、運転席以外の場合、操作者決定部234が決定した着座位置の乗員の適格性を判別し、適格性情報として出力する。適格性の判別は、車両内の座席位置毎に、当該座席に着座する乗員の適格性を予め登録した適格性データベース(適格性DB)241を用いる。適格性判別部240は、この適格性DB241を生成する適格性データ生成部242を備える。
【0034】
適格性データ生成部242は、画像取得部220が取得した距離画像を用い、車両内の着座位置毎に、当該着座位置の乗員の適格性の有無を判別し、判別結果を格納する適格性DB241を生成する。適格性の判別は、運転者以外の乗員について行う。本実施形態では、エンジン始動時、走行開始時、着座時など、予め定められたタイミングで、その時点の最新の距離画像を用い、各乗員の適格性を判別し、適格性DB241を生成する。なお、適格性DB241は、所定の時間間隔で更新するよう構成してもよい。また、距離画像から適格性DB241を生成する手法は後述する。
【0035】
信号出力部250は、車速情報、操作者情報および適格性情報に応じ、操作の受付を制限する制限信号を出力する。制限信号を出力するか否かは、制限DB260に規定されるルールに従って判別される。
【0036】
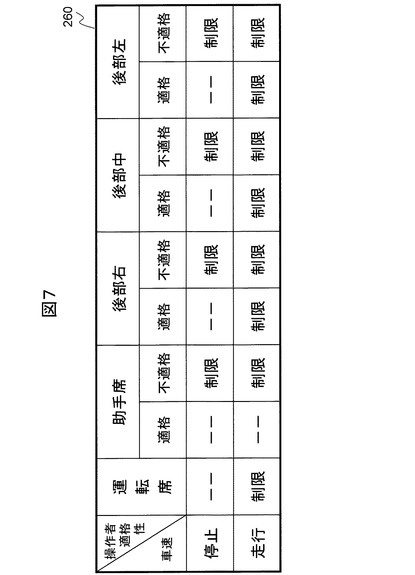
ここで、制限DB260の一例を図7に示す。本図に示すように、本実施形態の制限DB260には、車速情報、操作者情報および適格性情報毎に、制限信号を出力するか否かのルールが保持される。図7は、着座位置として運転席、助手席、後部右側座席(後部右)、後部中央座席(後部中)、後部左側座席(後部左)の5種が登録されている場合の例である。
【0037】
ここでは、操作者情報が運転席を示す情報である場合、停止中は操作の制限はしないが、走行中は操作受付を制限する。また、操作者情報が助手席の乗員であることを示す情報である場合、操作の適格性を有する場合は走行中、停止中いずれも操作の受け付けを制限しないが、操作不適格の場合は、走行中、停止中いずれも操作の受付を制限する。一方、操作者情報が後部座席の乗員であることを示す情報である場合、後部のいずれの座席に着座していても、操作の適格性がある場合は、停止中は操作を受け付け、不適格の場合は、操作を受け付けない。また、走行中は、操作の適格性によらず、操作を受け付けない。
【0038】
なお、制限DB260は、予め定義され、登録される。どのような条件で制限信号を出力するかは、任意に設定可能である。
【0039】
次に、本実施形態の適格性データ生成部242による適格性DB241生成手順について説明する。上述のように、本実施形態の適格性データ生成部242は、画像取得部220が取得する距離画像を用いて、着座位置毎に各乗員の適格性を判別し、その結果を適格性DB241に登録する。適格性、すなわち、操作に適した年齢に達しているか否かは、その身長(座高)で判別する。
【0040】
適格性データ生成部242は、各着座位置に該当する所定範囲の距離L1に、所定面積S1以上の略同一の距離値を有する画素群P1があるか否かを判別する。面積S1は、人物か否かを判別可能な面積とし、予め登録される。例えば、助手席と後部座席、あるいは、座席毎にS1の値は異なっても良い。適格性データ生成部242は、画素群P1がある着座位置について、各乗員の座高を算出する。
【0041】
例えば、図4に示す距離画像の場合、適格性データ生成部242は、予め登録されている、着座位置毎の距離範囲L1に、所定の面積S1以上の、略同距離の画素群P1の有無を判別する。ここでは、運転者が着座する距離範囲と、助手が着座する距離範囲と、後部中の乗員が着座する距離範囲と、後部左の乗員が着座する距離範囲に、それぞれ、所定の面積S1以上の略同距離の画素群が存在するため、それぞれについて、座高を算出する。そして、算出結果と基準値とを比較し、適格、不適格を判別する。
【0042】
助手席の乗員の場合、適格性データ生成部242は、当該画素群P1の、距離画像内での最大長さ方向の長さを判別し、座高とする。
【0043】
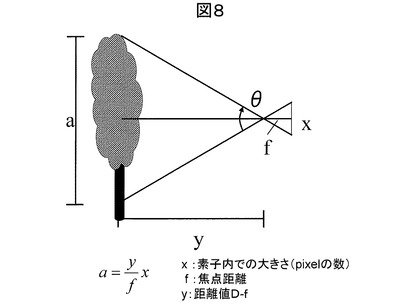
ここで、距離画像を用い、操作者の身長(座高)を特定する手法を説明する。図8は、距離画像上の長さ(画素数)から、実際の長さ(実長)を算出する手法を説明するための図である。距離画像において、対象物の、実長を測りたい方向の長さ(画素数)をx、同方向の中間の画素の画素値(距離値)をD、距離画像センサ221の焦点距離をfとすると、実長aは、以下の式(3)で表される。
a=((D-f)/f)×x (3)
【0044】
本実施形態の適格性データ生成部242は、この関係を利用し、着座位置が助手席の場合、抽出した画素群P1の、距離画像内での最大長さ方向の画素数xをカウントし、式(3)に従って、助手席の乗員の座高にあたる実長aを算出する。
【0045】
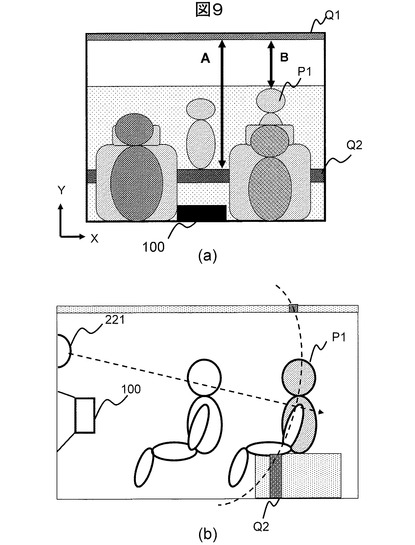
一方、後部座席の乗員の場合、適格性データ生成部242は、図9(a)に示すように、座面から車両の天井までの高さの画素数Aと、車両の天井から後部座席の乗員の頭頂部までの画素数Bとを算出し、A−Bを計算することにより、後部座席乗員の座高にあたる画素数xを算出する。そして、式(3)に従って、乗員の座高にあたる実長aを算出する。
【0046】
ここで、後部座席乗員の座高を算出する際に用いる、車両の後部座席の座面、天井の画素は、以下の手法で特定する。ここで、図9(a)に矢印で示す方向を、距離画像のx方向、y方向とし、各画素は、x座標、y座標で表されるものとする。図9(a)、(b)に示すように、画素群P1と同距離(距離値が同じ)画素群の中で、x方向に所定以上連続する画素群の中で、y座標の値がP1の頭頂部の画素のy座標の値より小さい画素群Q2を座面、同y座標の値以上の画素群Q1を天井とする。
【0047】
そして、助手席、後部差席ともに、算出した座高(実長)aが予め定められた値(基準値)以上であれば、操作者として相応しい年齢に達し、適格であると判別し、着座位置毎に判別結果を適格性DB241に登録する。なお、適格性を判別するルールは任意に設定可能である。
【0048】
このとき生成される適格性DB241の一例を図10に示す。本例の場合、助手席、後部左の乗員は適格と判別し、後部中の乗員は不適格と判別する。
【0049】
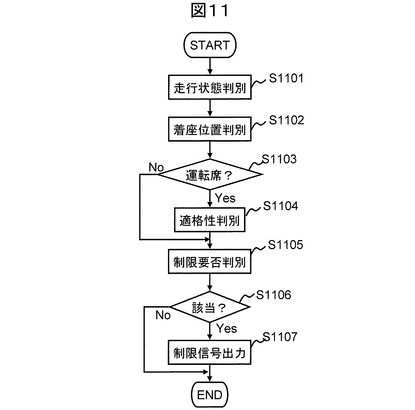
次に、本実施形態の受付制御部150による受付制御処理の流れについて説明する。図11は、本実施形態の受付制御処理の処理フローである。本実施形態の受付制御部150は、識別信号受信部232が、識別信号を受信したことをきっかけに処理を開始する。
【0050】
受付制御部150は、まず、走行状態判別部210にその時点の走行状態を判別させ、判別結果を車速情報として信号出力部250に通知する(ステップS1101)。次に、受付制御部150は、操作者特定部230に、操作者の座席位置を特定させ、結果を操作者情報として信号出力部250に通知する(ステップS1102)。受付制御部150は、操作者が運転者であるか否かを判別し(ステップS1103)、運転者でない場合、適格性判別部250に、その操作者の適格性を判別させ、判別結果を適格性情報として信号出力部250に通知する(ステップS1104)。一方、運転者である場合は、ステップS1105へ移行する。なお、ステップS1101とステップS1102とはいずれを先に行ってもよい。
【0051】
受付制御部150は、信号出力部250に、車速情報、座席位置情報、適格性情報を用い、制限DB260を参照し、制限信号出力に該当するか否かを判別させ(ステップS1105、ステップS1106)、該当する場合、制限信号を出力させ(ステップS1107)、処理を終了する。該当しない場合は、何も出力しないで処理を終了する。
【0052】
以上の処理により、本実施形態の受付制御部150は、車両の走行状態、操作者に応じて制限信号を出力し、ナビゲーション装置100の操作入力の受付を制限する。
【0053】
以上説明したように、本実施形態によれば、生体通信を用いて操作者を判別する。また、判別した操作者の適格性を、予め距離画像を用いて作成した着座位置毎の乗員の適格性DBに基づいて判別する。そして、車両の走行状態も考慮して操作の受け付けを制限するか否かを決定する。本実施形態によれば、操作者の着座位置だけでなく、その適格性も加味し、操作の受け付けを制限するか否かを決定するため、安全性を損なうことなく、適切に操作受付の制御を行うことができる。従って、安全性と利便性を両立することができる。
【0054】
また、適格性の判別に距離画像を用いるため、例えば、強い光の照射を受けるといった環境であっても、精度よく適格性を判別できる。すなわち、環境によらずに高い精度で適格性を判別できる。
【0055】
なお、上記実施形態において、受付制御部150の、距離画像センサ221を除く各機能は、CPUとメモリと記憶装置を備える情報処理装置上で、CPUが記憶装置に記憶されるプログラムをメモリにロードして実行することにより実現される。また、専用のハードウェアにより構成されてもよい。また、制限DB260および適格性DB241は、記憶装置上に構築される。
【0056】
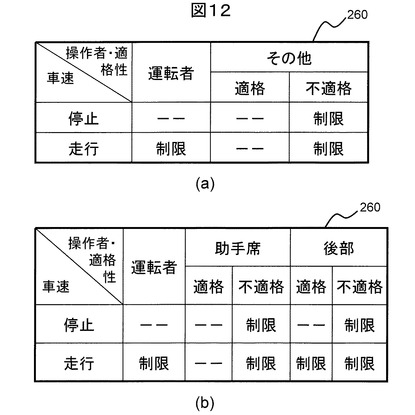
上記実施形態では、制限DB260に、座席毎に適格性、車速情報に応じて、制限するか否かを決定するルールを登録するよう構成しているが、これに限られない。例えば、図12(a)、(b)に示すように、制限を行うか否かの条件が同じ情報をまとめて保持するよう構成してもよい。
【0057】
また、上記実施形態では、制限DB260は、予め設定され、保持するよう構成されているが、ユーザが適宜入力設定可能なよう構成してもよい。この場合、受付制御部150は、制限DB260の入力受付インタフェースを備え、このインタフェースを介して登録を受け付ける。このように構成することにより、制限DB260の登録内容を変更するだけで、所望の制御を容易に実現することができる。
【0058】
また、上記実施形態では、受付制御部150は、ナビゲーション装置100が備えるものとして説明したが、これに限られない。受付制御部150は、ナビゲーション装置100とは独立して設けられていてもよい。
【0059】
また、距離画像センサ221は、本実施形態の受付制御部150とは独立して設けられていてもよい。この場合、受付制御部150は、距離画像センサ221からの信号を受信する距離画像センサ信号受信部を備え、ここで受信した電荷量を用い、画像を生成する。
【0060】
また、車両の走行状態を、車速信号により判別しているが、これに限られない。他の情報、例えば、パーキングブレーキの状態を示す信号により判別するよう構成してもよい。すなわち、パーキングブレーキがかかっている状態を停止状態とし、それ以外を走行中と判別する。
【0061】
また、上記実施形態では、車速情報および操作者情報により、制限信号を出力し、操作の受け付けを制限するよう構成しているが、これに限られない。通常、操作の受け付けを制限するよう構成し、所定の車速情報および操作者情報の組合せの場合のみ、許可するよう構成してもよい。
【0062】
また、上記実施形態では、適格性を判別する際、画素群P1の最大長さ方向を座高方向としているが、これに限られない。画素群の形状によるパターンマッチングを用い、座高方向を決定してもよい。パターンは、予め人物が有する形状を登録しておく。
【0063】
また、生体通信で情報が正しく読み取れない場合、再度入力装置120を操作するよう警告を発するよう構成してもよい。すなわち、ステップS1102において、操作者決定部234が受信した識別信号の発信元を特定できない場合、受付制御部150は、再度の操作を促し、識別信号の受信(操作者による入力装置120の操作)を待つよう構成する。そして、識別信号を受信すると、受付制御処理を開始する。
【0064】
また、上記実施形態では、操作者の適格性の判別を、距離画像を用いて予め作成した適格性DBを用いて行うよう構成しているが、これに限られない。操作者の着座位置が判別された後、その時点で最新の距離画像を用い、判別された着座位置の乗員の座高を検出し、適格、不適格を判別するよう構成してもよい。
【符号の説明】
【0065】
100:ナビゲーション装置、110:ナビゲーション処理部、120:入力装置、130:出力装置、140:車両状態センサ受信部、150:受付制御部、210:走行状態判別部、220:画像取得部、221:距離画像センサ、222:画像生成部、230:操作者特定部、231:識別信号発生部、232:識別信号受信部、233:識別信号記憶部、234:操作者決定部、240:適格性判別部、241:適格性データ生成部、241:適格性DB、250:信号出力部、260:制限DB、311:発振器、312:リアクタンスマッチング回路、313:送信電極、321:受信電極、322:増幅器
【技術分野】
【0001】
本発明は、車載装置の制御技術に関する。特に、カーナビゲーション装置等、車両の走行状態および操作者に応じて操作に制約のある装置の入力制御技術に関する。
【背景技術】
【0002】
車両に搭載されるオーディオ装置、カーナビゲーション装置等は、その多機能化に伴い、複雑な操作が要求されるようになっている。操作を行う際は、画面を注視しなければならないため、安全性を考慮して、走行中の操作は制限される。このような操作の制限は、車速センサ、ブレーキセンサなどの信号を利用して行われるため、操作者によらず、制限をうける。従って、安全性は充足されるが利便性は損なわれる。
【0003】
利便性の観点から、不要な制限を減らすため、ナビゲーション装置に位置検出センサを設け、操作者の着座方向を検出し、助手席側からの操作は受け入れるよう制御するものがある(例えば、特許文献1参照。)。また、タイマーで時間的に機能を制限するものがある(例えば、特許文献2参照。)。また、シート毎に付与された識別信号で判別するものがある(例えば、特許文献3参照。)。
【0004】
一方、運転者以外であっても、子供など、操作に不適格なものによる操作は、安全性の観点からは、制限を設けたほうがよい。これは、走行中、停止中といった車両の走行状態は問わない。乗員の体格等を識別するものとして、例えば、車内を撮影し、2次元画像(通常画像)と距離画像とを得、これらの画像により操作者の体格を判別するものがある(例えば、特許文献4参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平07−306055号公報
【特許文献2】特開2005−43064号公報
【特許文献3】特開平07−103778号公報
【特許文献4】特開2007−198929号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されている技術では、操作指示を受けた方向のみで操作者を判断するため、運転者が助手席側に腕を回して操作を行った場合は受け付けてしまう。また、センサの近傍に物体がある場合は操作者が正しく検出できない。特許文献2に開示されている技術では、制限時間外であれば、誰でも操作ができる。
【0007】
特許文献4に開示の技術では、通常画像と距離画像とを独立して取得するため、これらを対応づける構成が必要となる。そして、大掛かりな処理が必要となるにも関わらず、精度が良くない。従って、この特許文献4に開示されている技術を、特許文献3に開示されている技術に組み合わせたとしても、乗員の識別精度が低いため、操作者の適格性を適切に判断できない。従って、安全性と利便性とを両立できない。
【0008】
本発明は、上記事情に鑑みてなされたもので、車載装置の入力制御において、安全性と利便性とを両立可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、着座位置毎に設けられた識別信号を生体通信を用いて操作者経由で受信することにより操作者の着座位置を特定するとともに、特定された着座位置の乗員の適格性を、距離画像により判別する。そして、車両の走行状態、操作者の適格性に応じて、入力を制限することにより、車載装置の操作を制御する。適格性の判別は、予め距離画像を用いて作成した着座位置毎の乗員の適格性を格納する適格性データベースを用いる。
【0010】
具体的には、操作者からの操作に応じて処理を行う車載装置の操作の受付を制御する受付制御装置であって、当該車載機器が搭載される車両が走行中か否かを判別する走行状態判別手段と、生体通信を用いて操作者の着座位置を特定する操作者特定手段と、距離画像を取得する画像取得手段と、前記距離画像を用い、前記操作者特定手段が特定した着座位置の乗員の適格性を判別する適格性判別手段と、前記走行停止判別手段の判別結果と前記操作者特定手段の判別結果と前記適格性判別手段の判別結果とに応じ、操作の受付を制限する制限信号を出力する信号出力手段と、を備え、前記信号出力手段が制限信号を出力した場合、前記操作の受付を制限することを特徴とする受付制御装置を提供する。
【0011】
また、車載装置に対する操作者からの操作の受付を制限する車載装置の受付制御方法であって、操作があった場合、当該車両の走行状態を判別する走行状態判別ステップと、操作があった場合、操作者の着座位置を特定する操作者特定ステップと、前記操作者が運転者以外の場合、前記操作者の適格性を判別する適格性判別ステップと、前記走行状態判別ステップと、操作者特定ステップと、適格性判別ステップとの各結果に応じて、操作の受付を制限する受付制御ステップと、を備えることを特徴とする受付制御方法を提供する。
【発明の効果】
【0012】
本発明によれば、車載装置の入力制御において、安全性と利便性とを両立できる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態のナビゲーション装置の概略構成図である。
【図2】本発明の実施形態の受付制御部の機能ブロック図である。
【図3】(a)、(b)は、本発明の実施形態の距離画像センサおよびナビゲーション装置の設置位置を説明するための説明図である。
【図4】本発明の実施形態の距離画像の一例を説明するための説明図である。
【図5】(a)は、本発明の実施形態の識別信号発生部の構成を説明するためのブロック図であり、(b)は、同識別信号受信部の構成を説明するためのブロック図である。
【図6】(a)、(b)は、生体通信の概要を説明するための説明図である。
【図7】本発明の実施形態の制限データベースを説明するための説明図である。
【図8】距離画像上の長さから実際の長さを算出する手法を説明するための説明図である。
【図9】(a)、(b)は、本発明の実施形態の後部座席乗員の座高算出手法を説明するための説明図である。
【図10】本発明の実施形態の適格性データベースの一例を説明するための説明図である。
【図11】本発明の実施形態の受付制御処理のフローチャートである。
【図12】(a)、(b)は、本発明の実施形態の制限データベースの他の例を説明するための説明図である。
【発明を実施するための形態】
【0014】
以下、本発明を適用する実施形態について説明する。以下、本発明の実施形態を説明するための全図において、同一機能を有するものは同一符号を付し、その繰り返しの説明は省略する。
【0015】
本実施形態の車載装置の全体構成について、ナビゲーション装置を例にあげて説明する。図1は、本実施形態のナビゲーション装置の概略構成図である。本実施形態のナビゲーション装置100は、ナビゲーション処理部110と、入力装置120と、出力装置130と、車両状態センサ受信部140と、受付制御部150と、を備える。
【0016】
入力装置120および出力装置130は、操作者とのインタフェースを構成する。入力装置120は、操作者からの操作を受け付け、出力装置130は、ナビゲーション装置100による処理結果を操作者に通知する。入力装置120は、操作ボタン、スイッチ、タッチパネル等であり、出力装置130は、表示装置、音声出力装置等がある。表示装置が入力装置120および出力装置130を兼ねてもよい。
【0017】
車両状態センサ受信部140は、車両に備えられる、車両の各種状態を検出する車両状態センサからの信号を受信する。車両状態センサとして、例えば、車両の速度を検出し、速度に応じた車速信号を出力する車速センサを備える。本実施形態では、車両状態センサ受信部140は、この車速センサから出力される車速信号を受信し、受付制御部150に出力する。
【0018】
ナビゲーション処理部110は、入力装置120を介して入力される操作者からの指示に従って、予め保持する地図データ等のナビゲーション用データ、車両状態センサ受信部140で受信したセンサ信号を用い、ナビゲーション処理を行い、結果を出力装置130に出力する。
【0019】
受付制御部150は、操作者および車両の走行状態に応じて、ナビゲーション装置100に対する操作の受け付けを制限する。受け付けの制限は、制限信号を出力することにより行う。図2は、本実施形態の受付制御部150の機能ブロック図である。本実施形態の受付制御部150は、受付の制限を実現するため、図2に示すように、走行状態判別部210と、画像取得部220と、操作者特定部230と、適格性判別部240と、信号出力部250とを備える。受付制御部150は、これらの各部の動作を制御し、条件に応じて制限信号を出力する。また、制限信号を出力する条件(ルール)は、制限データベース(制限DB)260として予め保持される。
【0020】
走行状態判別部210は、車両状態センサ受信部140から受信した車速信号に基づき、ナビゲーション装置100が搭載されている車両が走行状態であるか、停止状態であるかを判別する。そして、判別結果として、車速が0の場合、停止を意味する停止信号を、それ以外の場合、走行中であることを意味する走行信号を、それぞれ車速情報として出力する。
【0021】
画像取得部220は、距離画像センサ221と画像生成部222とを備え、車両内の画像を取得する。本実施形態では、画像として距離画像を取得する。
【0022】
本実施形態の距離画像センサ221は、光飛行型距離画像センサで照射した変調光が対象物に反射することによる反射光を含む入射光を、画素毎に設けられた複数の電荷蓄積部に蓄積する。距離画像センサ221は、ナビゲーション装置100の入力装置120および車両内の全乗員の画像を取得可能な位置に配置される。例えば、図3に示すように、ルームミラー上に配置される。ここで、図3(a)は、距離画像センサ221が車両内に配置される位置を説明するためのイメージ図であり、図3(b)は、乗員500と距離画像センサ221との関係を説明するための図である。
【0023】
画像生成部222は、距離画像センサ221の電荷蓄積部に蓄積された電荷を所定時間毎に読出し、距離画像を生成する。図4は、本実施形態の画像生成部222が生成する距離画像の一例である。
【0024】
ここで、本実施形態の距離画像センサ221と画像生成部222とによる距離画像生成手法について簡単に説明する。
【0025】
本実施形態の距離画像センサ221は、対象空間に変調光を照射する光源と、光源から照射された変調光の反射光を含む入射光を受光し、電荷に変換する受光部とを備える。受光部は、受光量を電荷量に変換する光電変換素子が、距離画像の画素に対応づけて配列される。各光電変換素子で得られた電荷は、各光電変換素子が備える4つの電荷蓄積部に、変調の1周期を4等分した期間(例えば、0度から90度の間、90度から180度の間、180度から270度の間、270度から0度の間)毎に振り分けられ、蓄積される。
【0026】
本実施形態の画像生成部222は、所定の時間Δt毎に、4つの電荷蓄積部に蓄積された電荷量(順にC1、C2、C3、C4とする。)を用い、各画素の距離値Dを算出する。距離値Dは、まず、以下の式(1)に従って、位相差φを算出し、その位相差φを用い、以下の式(2)に従って算出する。
φ=tan−1((C1-C3)/(C2-C4)) (1)
D=φ/2π×c/2f (2)
ここで、cは光の速度、fは変調周波数である。以上により、画像取得部220は、Δt毎に距離画像を取得する。
【0027】
操作者特定部230は、人体を通じて信号を伝送する生体通信を用い、操作の有無、および、操作があった場合、その操作者の着座位置を特定する。これを実現するため、操作者特定部230は、識別信号発生部231と識別信号受信部232と識別信号記憶部233と操作者決定部234とを備える。
【0028】
識別信号発生部231は、人体を経由可能な識別信号を発生するもので、各乗員の座席位置を判別可能な位置、例えば、座席の座面に配置される。図5(a)は、本実施形態の識別信号発生部231の回路構成を説明するための図である。本図に示すように、識別信号発生部231は、発振器311と、リアクタンスマッチング回路312と、送信電極313とを備える。発振器311は、座席毎に予め定めた異なる周波数の識別信号を発生させる。発振器311で生成された識別信号は、リアクタンスマッチング回路312を経て送信電極313から送信される。発振器311は、エンジンがONになったことを契機として識別信号の発生を開始する。
【0029】
識別信号受信部232は、操作者がナビゲーション装置100の入力装置120に触れた際、識別信号発生部231が発生した識別信号を人体経由で受信する。識別信号受信部232は、ナビゲーション装置100の入力装置120に配置される。図5(b)は、本実施形態の識別信号受信部232の回路構成を説明するための図である。本図に示すように、識別信号受信部232は、受信電極321と増幅器322とを備える。受信電極321で識別信号を受信し、受信した識別信号を増幅器323で増幅し、出力する。
【0030】
図6は、識別信号発生部231と識別信号受信部232との間の生体通信の概要を説明するための図である。図6(a)および(b)に示すように、操作者(人体)が入力装置120に触れると、識別信号発生部231で生成された識別信号が、人体を介して識別信号受信部232に送信される。
【0031】
識別信号記憶部233には、着座位置毎の発信周波数が保持される。着座位置毎の発信周波数は予め登録され、保持される。
【0032】
操作者決定部234は、識別信号受信部232で受信した識別信号の発信元の着座位置を特定し、入力装置120に触れた操作者の着座位置を特定する。操作者の特定は、識別信号受信部232で受信した識別信号の周波数から、識別信号記憶部233を参照することにより行う。そして、操作者の着座位置を特定する情報を操作者情報として出力する。
【0033】
適格性判別部240は、操作者特定部230の出力が、運転席以外の場合、操作者決定部234が決定した着座位置の乗員の適格性を判別し、適格性情報として出力する。適格性の判別は、車両内の座席位置毎に、当該座席に着座する乗員の適格性を予め登録した適格性データベース(適格性DB)241を用いる。適格性判別部240は、この適格性DB241を生成する適格性データ生成部242を備える。
【0034】
適格性データ生成部242は、画像取得部220が取得した距離画像を用い、車両内の着座位置毎に、当該着座位置の乗員の適格性の有無を判別し、判別結果を格納する適格性DB241を生成する。適格性の判別は、運転者以外の乗員について行う。本実施形態では、エンジン始動時、走行開始時、着座時など、予め定められたタイミングで、その時点の最新の距離画像を用い、各乗員の適格性を判別し、適格性DB241を生成する。なお、適格性DB241は、所定の時間間隔で更新するよう構成してもよい。また、距離画像から適格性DB241を生成する手法は後述する。
【0035】
信号出力部250は、車速情報、操作者情報および適格性情報に応じ、操作の受付を制限する制限信号を出力する。制限信号を出力するか否かは、制限DB260に規定されるルールに従って判別される。
【0036】
ここで、制限DB260の一例を図7に示す。本図に示すように、本実施形態の制限DB260には、車速情報、操作者情報および適格性情報毎に、制限信号を出力するか否かのルールが保持される。図7は、着座位置として運転席、助手席、後部右側座席(後部右)、後部中央座席(後部中)、後部左側座席(後部左)の5種が登録されている場合の例である。
【0037】
ここでは、操作者情報が運転席を示す情報である場合、停止中は操作の制限はしないが、走行中は操作受付を制限する。また、操作者情報が助手席の乗員であることを示す情報である場合、操作の適格性を有する場合は走行中、停止中いずれも操作の受け付けを制限しないが、操作不適格の場合は、走行中、停止中いずれも操作の受付を制限する。一方、操作者情報が後部座席の乗員であることを示す情報である場合、後部のいずれの座席に着座していても、操作の適格性がある場合は、停止中は操作を受け付け、不適格の場合は、操作を受け付けない。また、走行中は、操作の適格性によらず、操作を受け付けない。
【0038】
なお、制限DB260は、予め定義され、登録される。どのような条件で制限信号を出力するかは、任意に設定可能である。
【0039】
次に、本実施形態の適格性データ生成部242による適格性DB241生成手順について説明する。上述のように、本実施形態の適格性データ生成部242は、画像取得部220が取得する距離画像を用いて、着座位置毎に各乗員の適格性を判別し、その結果を適格性DB241に登録する。適格性、すなわち、操作に適した年齢に達しているか否かは、その身長(座高)で判別する。
【0040】
適格性データ生成部242は、各着座位置に該当する所定範囲の距離L1に、所定面積S1以上の略同一の距離値を有する画素群P1があるか否かを判別する。面積S1は、人物か否かを判別可能な面積とし、予め登録される。例えば、助手席と後部座席、あるいは、座席毎にS1の値は異なっても良い。適格性データ生成部242は、画素群P1がある着座位置について、各乗員の座高を算出する。
【0041】
例えば、図4に示す距離画像の場合、適格性データ生成部242は、予め登録されている、着座位置毎の距離範囲L1に、所定の面積S1以上の、略同距離の画素群P1の有無を判別する。ここでは、運転者が着座する距離範囲と、助手が着座する距離範囲と、後部中の乗員が着座する距離範囲と、後部左の乗員が着座する距離範囲に、それぞれ、所定の面積S1以上の略同距離の画素群が存在するため、それぞれについて、座高を算出する。そして、算出結果と基準値とを比較し、適格、不適格を判別する。
【0042】
助手席の乗員の場合、適格性データ生成部242は、当該画素群P1の、距離画像内での最大長さ方向の長さを判別し、座高とする。
【0043】
ここで、距離画像を用い、操作者の身長(座高)を特定する手法を説明する。図8は、距離画像上の長さ(画素数)から、実際の長さ(実長)を算出する手法を説明するための図である。距離画像において、対象物の、実長を測りたい方向の長さ(画素数)をx、同方向の中間の画素の画素値(距離値)をD、距離画像センサ221の焦点距離をfとすると、実長aは、以下の式(3)で表される。
a=((D-f)/f)×x (3)
【0044】
本実施形態の適格性データ生成部242は、この関係を利用し、着座位置が助手席の場合、抽出した画素群P1の、距離画像内での最大長さ方向の画素数xをカウントし、式(3)に従って、助手席の乗員の座高にあたる実長aを算出する。
【0045】
一方、後部座席の乗員の場合、適格性データ生成部242は、図9(a)に示すように、座面から車両の天井までの高さの画素数Aと、車両の天井から後部座席の乗員の頭頂部までの画素数Bとを算出し、A−Bを計算することにより、後部座席乗員の座高にあたる画素数xを算出する。そして、式(3)に従って、乗員の座高にあたる実長aを算出する。
【0046】
ここで、後部座席乗員の座高を算出する際に用いる、車両の後部座席の座面、天井の画素は、以下の手法で特定する。ここで、図9(a)に矢印で示す方向を、距離画像のx方向、y方向とし、各画素は、x座標、y座標で表されるものとする。図9(a)、(b)に示すように、画素群P1と同距離(距離値が同じ)画素群の中で、x方向に所定以上連続する画素群の中で、y座標の値がP1の頭頂部の画素のy座標の値より小さい画素群Q2を座面、同y座標の値以上の画素群Q1を天井とする。
【0047】
そして、助手席、後部差席ともに、算出した座高(実長)aが予め定められた値(基準値)以上であれば、操作者として相応しい年齢に達し、適格であると判別し、着座位置毎に判別結果を適格性DB241に登録する。なお、適格性を判別するルールは任意に設定可能である。
【0048】
このとき生成される適格性DB241の一例を図10に示す。本例の場合、助手席、後部左の乗員は適格と判別し、後部中の乗員は不適格と判別する。
【0049】
次に、本実施形態の受付制御部150による受付制御処理の流れについて説明する。図11は、本実施形態の受付制御処理の処理フローである。本実施形態の受付制御部150は、識別信号受信部232が、識別信号を受信したことをきっかけに処理を開始する。
【0050】
受付制御部150は、まず、走行状態判別部210にその時点の走行状態を判別させ、判別結果を車速情報として信号出力部250に通知する(ステップS1101)。次に、受付制御部150は、操作者特定部230に、操作者の座席位置を特定させ、結果を操作者情報として信号出力部250に通知する(ステップS1102)。受付制御部150は、操作者が運転者であるか否かを判別し(ステップS1103)、運転者でない場合、適格性判別部250に、その操作者の適格性を判別させ、判別結果を適格性情報として信号出力部250に通知する(ステップS1104)。一方、運転者である場合は、ステップS1105へ移行する。なお、ステップS1101とステップS1102とはいずれを先に行ってもよい。
【0051】
受付制御部150は、信号出力部250に、車速情報、座席位置情報、適格性情報を用い、制限DB260を参照し、制限信号出力に該当するか否かを判別させ(ステップS1105、ステップS1106)、該当する場合、制限信号を出力させ(ステップS1107)、処理を終了する。該当しない場合は、何も出力しないで処理を終了する。
【0052】
以上の処理により、本実施形態の受付制御部150は、車両の走行状態、操作者に応じて制限信号を出力し、ナビゲーション装置100の操作入力の受付を制限する。
【0053】
以上説明したように、本実施形態によれば、生体通信を用いて操作者を判別する。また、判別した操作者の適格性を、予め距離画像を用いて作成した着座位置毎の乗員の適格性DBに基づいて判別する。そして、車両の走行状態も考慮して操作の受け付けを制限するか否かを決定する。本実施形態によれば、操作者の着座位置だけでなく、その適格性も加味し、操作の受け付けを制限するか否かを決定するため、安全性を損なうことなく、適切に操作受付の制御を行うことができる。従って、安全性と利便性を両立することができる。
【0054】
また、適格性の判別に距離画像を用いるため、例えば、強い光の照射を受けるといった環境であっても、精度よく適格性を判別できる。すなわち、環境によらずに高い精度で適格性を判別できる。
【0055】
なお、上記実施形態において、受付制御部150の、距離画像センサ221を除く各機能は、CPUとメモリと記憶装置を備える情報処理装置上で、CPUが記憶装置に記憶されるプログラムをメモリにロードして実行することにより実現される。また、専用のハードウェアにより構成されてもよい。また、制限DB260および適格性DB241は、記憶装置上に構築される。
【0056】
上記実施形態では、制限DB260に、座席毎に適格性、車速情報に応じて、制限するか否かを決定するルールを登録するよう構成しているが、これに限られない。例えば、図12(a)、(b)に示すように、制限を行うか否かの条件が同じ情報をまとめて保持するよう構成してもよい。
【0057】
また、上記実施形態では、制限DB260は、予め設定され、保持するよう構成されているが、ユーザが適宜入力設定可能なよう構成してもよい。この場合、受付制御部150は、制限DB260の入力受付インタフェースを備え、このインタフェースを介して登録を受け付ける。このように構成することにより、制限DB260の登録内容を変更するだけで、所望の制御を容易に実現することができる。
【0058】
また、上記実施形態では、受付制御部150は、ナビゲーション装置100が備えるものとして説明したが、これに限られない。受付制御部150は、ナビゲーション装置100とは独立して設けられていてもよい。
【0059】
また、距離画像センサ221は、本実施形態の受付制御部150とは独立して設けられていてもよい。この場合、受付制御部150は、距離画像センサ221からの信号を受信する距離画像センサ信号受信部を備え、ここで受信した電荷量を用い、画像を生成する。
【0060】
また、車両の走行状態を、車速信号により判別しているが、これに限られない。他の情報、例えば、パーキングブレーキの状態を示す信号により判別するよう構成してもよい。すなわち、パーキングブレーキがかかっている状態を停止状態とし、それ以外を走行中と判別する。
【0061】
また、上記実施形態では、車速情報および操作者情報により、制限信号を出力し、操作の受け付けを制限するよう構成しているが、これに限られない。通常、操作の受け付けを制限するよう構成し、所定の車速情報および操作者情報の組合せの場合のみ、許可するよう構成してもよい。
【0062】
また、上記実施形態では、適格性を判別する際、画素群P1の最大長さ方向を座高方向としているが、これに限られない。画素群の形状によるパターンマッチングを用い、座高方向を決定してもよい。パターンは、予め人物が有する形状を登録しておく。
【0063】
また、生体通信で情報が正しく読み取れない場合、再度入力装置120を操作するよう警告を発するよう構成してもよい。すなわち、ステップS1102において、操作者決定部234が受信した識別信号の発信元を特定できない場合、受付制御部150は、再度の操作を促し、識別信号の受信(操作者による入力装置120の操作)を待つよう構成する。そして、識別信号を受信すると、受付制御処理を開始する。
【0064】
また、上記実施形態では、操作者の適格性の判別を、距離画像を用いて予め作成した適格性DBを用いて行うよう構成しているが、これに限られない。操作者の着座位置が判別された後、その時点で最新の距離画像を用い、判別された着座位置の乗員の座高を検出し、適格、不適格を判別するよう構成してもよい。
【符号の説明】
【0065】
100:ナビゲーション装置、110:ナビゲーション処理部、120:入力装置、130:出力装置、140:車両状態センサ受信部、150:受付制御部、210:走行状態判別部、220:画像取得部、221:距離画像センサ、222:画像生成部、230:操作者特定部、231:識別信号発生部、232:識別信号受信部、233:識別信号記憶部、234:操作者決定部、240:適格性判別部、241:適格性データ生成部、241:適格性DB、250:信号出力部、260:制限DB、311:発振器、312:リアクタンスマッチング回路、313:送信電極、321:受信電極、322:増幅器
【特許請求の範囲】
【請求項1】
操作者からの操作に応じて処理を行う車載装置の操作の受付を制御する受付制御装置であって、
当該車載機器が搭載される車両が走行中か否かを判別する走行状態判別手段と、
生体通信を用いて操作者の着座位置を特定する操作者特定手段と、
距離画像を取得する画像取得手段と、
前記距離画像を用い、前記操作者特定手段が特定した着座位置の乗員の適格性を判別する適格性判別手段と、
前記走行停止判別手段の判別結果と前記操作者特定手段の判別結果と前記適格性判別手段の判別結果とに応じ、操作の受付を制限する制限信号を出力する信号出力手段と、を備え、
前記信号出力手段が制限信号を出力した場合、前記操作の受付を制限すること
を特徴とする受付制御装置。
【請求項2】
請求項1記載の受付制御装置であって、
前記適格性判別手段は、
所定のタイミングで、前記距離画像を用い、車両内の着座位置毎に、当該着座位置の乗員の適格性を判別し、判別結果を適格性データベースとして管理する適格性データベース生成手段を備え、
前記適格性データベースに従って、前記着座位置の乗員の適格性を判別すること
を特徴とする受付制御装置。
【請求項3】
請求項2記載の受付制御装置であって、
前記適格性データベース生成手段は、距離画像を用い、当該着座位置の乗員の座高から、前記適格性を判別すること
を特徴とする受付制御装置。
【請求項4】
請求項1から3いずれか1項記載の受付制御装置であって、
前記操作者特定手段は、
車両内の乗員の着座位置を特定可能で、かつ、生体を経由可能な識別信号を発生する識別信号発生手段と、
前記操作者による操作がなされた際、当該操作者を経由して前記識別信号を受信する識別信号受信手段と、を備え、
前記識別信号受信手段が受信した識別信号に基づき、前記操作者の着座位置を特定すること
を特徴とする受付制御装置。
【請求項5】
車載装置に対する操作者からの操作の受付を制限する車載装置の受付制御方法であって、
操作があった場合、当該車両の走行状態を判別する走行状態判別ステップと、
操作があった場合、操作者の着座位置を特定する操作者特定ステップと、
前記操作者が運転者以外の場合、前記操作者の適格性を判別する適格性判別ステップと、
前記走行状態判別ステップと、操作者特定ステップと、適格性判別ステップとの各結果に応じて、操作の受付を制限する受付制御ステップと、を備えること
を特徴とする受付制御方法。
【請求項6】
操作者からの操作に応じて処理を行う車載装置であって、
請求項1から4記載の受付制御装置を備えること
を特徴とする車載装置。
【請求項1】
操作者からの操作に応じて処理を行う車載装置の操作の受付を制御する受付制御装置であって、
当該車載機器が搭載される車両が走行中か否かを判別する走行状態判別手段と、
生体通信を用いて操作者の着座位置を特定する操作者特定手段と、
距離画像を取得する画像取得手段と、
前記距離画像を用い、前記操作者特定手段が特定した着座位置の乗員の適格性を判別する適格性判別手段と、
前記走行停止判別手段の判別結果と前記操作者特定手段の判別結果と前記適格性判別手段の判別結果とに応じ、操作の受付を制限する制限信号を出力する信号出力手段と、を備え、
前記信号出力手段が制限信号を出力した場合、前記操作の受付を制限すること
を特徴とする受付制御装置。
【請求項2】
請求項1記載の受付制御装置であって、
前記適格性判別手段は、
所定のタイミングで、前記距離画像を用い、車両内の着座位置毎に、当該着座位置の乗員の適格性を判別し、判別結果を適格性データベースとして管理する適格性データベース生成手段を備え、
前記適格性データベースに従って、前記着座位置の乗員の適格性を判別すること
を特徴とする受付制御装置。
【請求項3】
請求項2記載の受付制御装置であって、
前記適格性データベース生成手段は、距離画像を用い、当該着座位置の乗員の座高から、前記適格性を判別すること
を特徴とする受付制御装置。
【請求項4】
請求項1から3いずれか1項記載の受付制御装置であって、
前記操作者特定手段は、
車両内の乗員の着座位置を特定可能で、かつ、生体を経由可能な識別信号を発生する識別信号発生手段と、
前記操作者による操作がなされた際、当該操作者を経由して前記識別信号を受信する識別信号受信手段と、を備え、
前記識別信号受信手段が受信した識別信号に基づき、前記操作者の着座位置を特定すること
を特徴とする受付制御装置。
【請求項5】
車載装置に対する操作者からの操作の受付を制限する車載装置の受付制御方法であって、
操作があった場合、当該車両の走行状態を判別する走行状態判別ステップと、
操作があった場合、操作者の着座位置を特定する操作者特定ステップと、
前記操作者が運転者以外の場合、前記操作者の適格性を判別する適格性判別ステップと、
前記走行状態判別ステップと、操作者特定ステップと、適格性判別ステップとの各結果に応じて、操作の受付を制限する受付制御ステップと、を備えること
を特徴とする受付制御方法。
【請求項6】
操作者からの操作に応じて処理を行う車載装置であって、
請求項1から4記載の受付制御装置を備えること
を特徴とする車載装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−164063(P2011−164063A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−30252(P2010−30252)
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月15日(2010.2.15)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
【Fターム(参考)】
[ Back to top ]