
車載角速度検出装置
【課題】角速度をより適正に計測すること。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
【解決手段】車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、車両の鉛直軸及び第1の方向に直交する第2の方向における振動子の変位を検出する変位検出手段と、変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、を備える車載角速度検出装置であって、車両を回動させるターンテーブルの角速度を、算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、車両がターンテーブルにより回動しているときに算出手段により算出された角速度と、ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、算出手段の算出傾向を修正する修正手段と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、車両の鉛直軸周りの角速度を検出する車載角速度検出装置に関する。
【背景技術】
【0002】
従来、振動子を三次元直交座標系における第1の軸に沿って励振振動させ、第1の軸に直交する第2の軸に沿った振動を検出することにより、振動子に生じた第1の軸及び第2の軸の双方に直交する第3の軸周りの角速度を検出する角速度検出装置が知られている。係る角速度検出装置は、第3の軸を鉛直軸とする向きで車両に搭載されることにより、ヨーレートセンサーとして用いられている。ヨーレートセンサーの出力値は、車両の横滑りを検出して行なう自動ブレーキ制御等において広く用いられている。
【0003】
このような角速度検出装置を含むナビゲーション装置についての発明が開示されている(例えば、特許文献1参照)。この装置では、移動体が停止中であり、かつ角速度データの示す角速度の変化率が所定範囲内であり、なおかつ絶対方位データの示す方位の変化率が所定範囲内である場合に、角速度センサの出力の基準値をその時の出力値に設定するものとしている。
【特許文献1】特開平5−157572号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載の装置が行なっている処理は、角速度が値ゼロである場合に角速度センサの出力が値ゼロとなるように修正するものである。角速度検出装置においては、温度や経年変化等により出力値が実際の角速度から乖離する場合があるからである。
【0005】
しかしながら、角速度検出装置においては、更に角速度の変化に対する出力値の傾きが温度や経年劣化等により変化する場合がある。上記特許文献1に記載の装置では、これに対応する処理を何ら行なっていない。
【0006】
本発明はこのような課題を解決するためのものであり、角速度をより適正に計測することが可能な車載角速度検出装置を提供することを、主たる目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の一態様は、
車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、
前記車両の鉛直軸及び前記第1の方向に直交する第2の方向における前記振動子の変位を検出する変位検出手段と、
前記変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、
を備える車載角速度検出装置であって、
車両を回動させるターンテーブルの角速度を、前記算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、
車両が前記ターンテーブルにより回動しているときに前記算出手段により算出された角速度と、前記ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、前記算出手段の算出傾向を修正する修正手段と、
を備えることを特徴とする、車載角速度検出装置である。
【0008】
この本発明の一態様によれば、角速度をより適正に計測することができる。
【0009】
本発明の一態様において、
前記ターンテーブル角速度取得手段は、例えば、ユーザー入力によってターンテーブルの角速度を取得する手段である。
【0010】
また、本発明の一態様において、
前記ターンテーブル角速度取得手段は、例えば、車外設備との通信によってターンテーブルの角速度を取得する手段である。
【発明の効果】
【0011】
本発明によれば、角速度をより適正に計測することが可能な車載角速度検出装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を実施するための最良の形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0013】
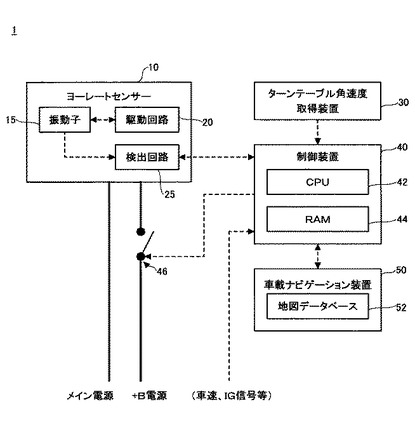
以下、本発明の一実施例に係る車載角速度検出装置1について説明する。図1は、車載角速度検出装置1のシステム構成例である。車載角速度検出装置1は、主要な構成として、ヨーレートセンサー10と、ターンテーブル角速度取得装置30と、制御装置40と、を備える。制御装置40には、車載ナビゲーション装置50が接続されている。また、車載角速度検出装置1は、車両のメイン電源、及びメイン電源がオフの状態であっても供給される、+B電源によって電力が供給されている。
【0014】
ヨーレートセンサー10は、例えばMEMS(Micro Electro Mechanical Systems)センサーであり、振動子15と、駆動回路20と、検出回路25と、を備える。
【0015】
振動子15は、車両の鉛直軸に直交する第1の方向に励振されると共に、車両の鉛直軸及び第1の方向に直交する第2の方向に振動可能に構成される。振動子15の周囲には励振用及び振動検出用の複数の電極が配設されており、それぞれが振動子15との間の静電容量の変化を駆動回路20及び検出回路25に出力している。そして、振動子15が第1の方向に駆動されているときに鉛直軸周りの角速度が発生すると、コリオリ力によって第2の方向に振動が発生する。
【0016】
ヨーレートセンサー10は、第2の軸方向の振動の大きさを検出することにより、鉛直軸周りの角速度を検出する。なお、振動子15の形状や電極の配設位置について特段の制限はなく、如何なるものを用いても構わない。
【0017】
駆動回路20は、例えばVCO(Voltage-Controlled Oscillator)等を有するPLL(Phase-Locked Loop)回路を基本として構成され、振動子15の周囲に配設された励振用の電極に駆動信号(AC成分を有する電圧信号)を出力する。これにより、振動子15は一定の周期で上記第1の方向に励振される。なお、これに限らず、モーターやソレノイドを用いて機械的に振動子15を振動させる構成であってもよい。
【0018】
検出回路25は、振動子15の周囲に配設された電極により検出された静電容量を電圧に変換する(Q/V変換)すると共に、これを復調して、振動子15の第2の方向の振動に応じた信号を生成する。そして、この信号に対して周期的な反転処理を行なって検波信号を生成し、積分器等によって検波信号を平均化し、オペアンプ等を介して増幅等の処理を行なって角速度信号を生成する。
【0019】
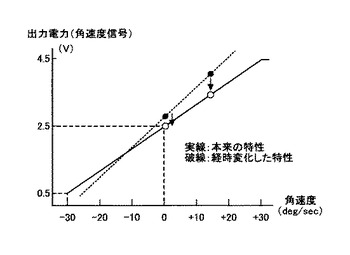
ここで、このような構成のヨーレートセンサー10が有する問題点について説明する。ヨーレートセンサー10では、温度変化や経年劣化等により、静止時の出力値や角速度の変化に対する出力値の傾きが変化する場合がある。図2は、係る様子を示す図である。
【0020】
そこで、本実施例の車載角速度検出装置1では、駐車場等に設置されているターンテーブルに車両が乗せられた際に、このターンテーブルの角速度を取得するターンテーブル角速度取得装置30を備え、車両がターンテーブルにより回動しているときに検出回路25から出力された角速度と、ターンテーブル角速度取得装置30により取得されたターンテーブルの角速度との比較に基づいて、検出回路25の角速度算出傾向(ゲイン)を修正することとした。
【0021】
ターンテーブル角速度取得装置30は、例えばユーザーにより角速度の入力が行なわれるタッチパネル、スイッチ、音声入力装置等の入力装置である。また、これに限らず、車載ナビゲーション装置50の地図データベース52にターンテーブルの角速度に関する情報が記憶されていてもよいし、駐車場等に設置された通信装置からターンテーブルの角速度に関する情報を受信してもよい。一度入力又は取得されたターンテーブルの角速度については、地図データベース52に記憶されるものとすると好適である。
【0022】
そして、修正処理は、制御装置40によって実行される。制御装置40は、例えばCPU(Central Processing Unit)42を中心としてROM(Read Only Memory)やRAM(Random Access Memory)44等がバスを介して相互に接続されたマイクロコンピューターである。
【0023】
ヨーレートセンサー10の出力値は、車両がターンテーブルを有する駐車場内に在るときに、所定周期でサンプリングされてRAM44に記憶される。係る処理は、車両のメイン電源がオフの状態であっても、スイッチ46がオン状態とされて+B電源を用いて行なわれる。また、制御装置40には、車速やIG(イグニッション)信号等、車両の状態を示す各種信号が入力される。
【0024】
ターンテーブルを有する駐車場内に車両が在るか否かは、車載ナビゲーション装置50がGPS(Global Positioning System)等により特定した車両の現在位置特定と、地図データベース52とのマッチングにより行なわれる。地図データベース52には、主要な施設に付随する駐車場の座標、及びターンテーブルの有無に関する情報が記憶されている。
【0025】
なお、検出回路25が制御装置40の機能を有するものとしてもよいし、車載ナビゲーション装置50の制御コンピューターが制御装置40の機能を有するものとしてもよい。
【0026】
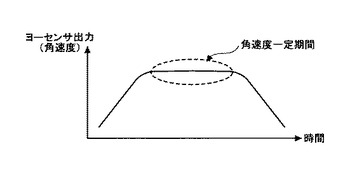
車両がターンテーブルにより回動しているときに検出回路25から出力される角速度は、一般的に図3に示す如き経時変化をする。制御装置40は、RAM44に記憶された角速度を読み込んで、角速度が一定の期間を特定する。具体的には、例えば、角速度の変動幅が所定値未満である状態が所定期間以上継続している期間が、角速度が一定の期間として特定される。
【0027】
そして、制御装置40は、この角速度が一定の部分における平均値、中心値等を算出し、車両がターンテーブルにより回動しているときに検出回路25から出力された角速度として扱う。
【0028】
なお、静止時の出力値を修正する処理(ゼロ点ドリフト)については既に種々の手法が公知となっているため、説明を省略する。
【0029】
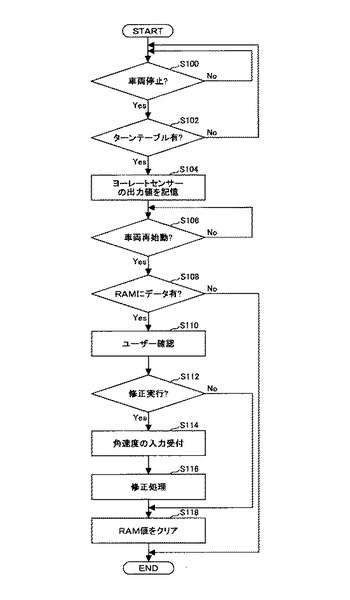
図4は、制御装置40が実行する特徴的な処理の流れを示すフローチャートである。
【0030】
まず、車両が停止状態となったか否かを判定する(S100)。なお、以下の処理を開始するトリガーとなる本ステップの判定は、「イグニッションスイッチの状態がACCオフ状態となったか否か」等と任意に置換することができる。車両が停止状態となっていない場合は、車両が停止状態となるまで待機する。
【0031】
車両が停止状態となると、車両がターンテーブルの有る駐車場内に在るか否かを判定する(S102)。車両がターンテーブルの有る駐車場内にない場合は、再度S100以下の処理を実行する。
【0032】
車両がターンテーブルの有る駐車場内に在る場合は、ヨーレートセンサー10の出力値をサンプリングしてRAM44に記憶させる(S104)。
【0033】
そして、車両が再始動されるまで待機し(S106)、RAM44にヨーレートセンサー10の出力値データが存在するか否かを判定する(S108)。RAM44にヨーレートセンサー10の出力値データが存在しない場合は、本フローの1ルーチンを終了する。なお、S106の判定は、S100と対応し、「イグニッションスイッチの状態がACCオン状態となったか否か」等と任意に置換することができる。
【0034】
一方、RAM44にヨーレートセンサー10の出力値データが存在する場合は、スピーカーや表示装置を用いて、ユーザーに対してヨーレートセンサー10の修正を実行するか否かの問いかけを行なう(S110)。
【0035】
ユーザーにより修正実行が選択されなかった場合は、RAM44の値をクリアして(S118)、本フローの1ルーチンを終了する。
【0036】
ユーザーにより修正実行が選択された場合は、当該ターンテーブルの角速度をユーザーに入力させる(S114)。前述した如く、本処理は、通信によってターンテーブルの角速度を取得するものであってよい。この場合、通信を行なうタイミングは本フローに何ら拘束されない。
【0037】
そして、入力(又は通信により取得)された角速度を用いて、ヨーレートセンサー10の修正を実行する(S116)。本処理は、具体的には、検出回路25が内蔵するオペアンプに制御信号を出力すること等によって実現される。
【0038】
ヨーレートセンサー10の修正を実行すると、RAM44の値をクリアして(S118)、本フローの1ルーチンを終了する。
【0039】
本実施例の車載角速度検出装置1によれば、ターンテーブルの角速度を用いてヨーレートセンサー10の修正を行なうため、角速度をより適正に計測することができる。
【0040】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【産業上の利用可能性】
【0041】
本発明は、自動車製造業や自動車部品製造業等に利用可能である。
【図面の簡単な説明】
【0042】
【図1】車載角速度検出装置1のシステム構成例である。
【図2】ヨーレートセンサー10において、温度変化や経年劣化等により、静止時の出力値や角速度の変化に対する出力値の傾きが変化する様子を示す図である。
【図3】車両がターンテーブルにより回動しているときに検出回路25から出力された角速度の一般的な経時変化を示す図である。
【図4】制御装置40が実行する特徴的な処理の流れを示すフローチャートである。
【符号の説明】
【0043】
1 車載角速度検出装置
10 ヨーレートセンサー
15 振動子
20 駆動回路
25 検出回路
30 ターンテーブル角速度取得装置
40 制御装置
42 CPU
44 RAM
46 スイッチ
50 車載ナビゲーション装置
52 地図データベース
【技術分野】
【0001】
本発明は、車両に搭載され、車両の鉛直軸周りの角速度を検出する車載角速度検出装置に関する。
【背景技術】
【0002】
従来、振動子を三次元直交座標系における第1の軸に沿って励振振動させ、第1の軸に直交する第2の軸に沿った振動を検出することにより、振動子に生じた第1の軸及び第2の軸の双方に直交する第3の軸周りの角速度を検出する角速度検出装置が知られている。係る角速度検出装置は、第3の軸を鉛直軸とする向きで車両に搭載されることにより、ヨーレートセンサーとして用いられている。ヨーレートセンサーの出力値は、車両の横滑りを検出して行なう自動ブレーキ制御等において広く用いられている。
【0003】
このような角速度検出装置を含むナビゲーション装置についての発明が開示されている(例えば、特許文献1参照)。この装置では、移動体が停止中であり、かつ角速度データの示す角速度の変化率が所定範囲内であり、なおかつ絶対方位データの示す方位の変化率が所定範囲内である場合に、角速度センサの出力の基準値をその時の出力値に設定するものとしている。
【特許文献1】特開平5−157572号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載の装置が行なっている処理は、角速度が値ゼロである場合に角速度センサの出力が値ゼロとなるように修正するものである。角速度検出装置においては、温度や経年変化等により出力値が実際の角速度から乖離する場合があるからである。
【0005】
しかしながら、角速度検出装置においては、更に角速度の変化に対する出力値の傾きが温度や経年劣化等により変化する場合がある。上記特許文献1に記載の装置では、これに対応する処理を何ら行なっていない。
【0006】
本発明はこのような課題を解決するためのものであり、角速度をより適正に計測することが可能な車載角速度検出装置を提供することを、主たる目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の一態様は、
車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、
前記車両の鉛直軸及び前記第1の方向に直交する第2の方向における前記振動子の変位を検出する変位検出手段と、
前記変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と、
を備える車載角速度検出装置であって、
車両を回動させるターンテーブルの角速度を、前記算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、
車両が前記ターンテーブルにより回動しているときに前記算出手段により算出された角速度と、前記ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、前記算出手段の算出傾向を修正する修正手段と、
を備えることを特徴とする、車載角速度検出装置である。
【0008】
この本発明の一態様によれば、角速度をより適正に計測することができる。
【0009】
本発明の一態様において、
前記ターンテーブル角速度取得手段は、例えば、ユーザー入力によってターンテーブルの角速度を取得する手段である。
【0010】
また、本発明の一態様において、
前記ターンテーブル角速度取得手段は、例えば、車外設備との通信によってターンテーブルの角速度を取得する手段である。
【発明の効果】
【0011】
本発明によれば、角速度をより適正に計測することが可能な車載角速度検出装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明を実施するための最良の形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0013】
以下、本発明の一実施例に係る車載角速度検出装置1について説明する。図1は、車載角速度検出装置1のシステム構成例である。車載角速度検出装置1は、主要な構成として、ヨーレートセンサー10と、ターンテーブル角速度取得装置30と、制御装置40と、を備える。制御装置40には、車載ナビゲーション装置50が接続されている。また、車載角速度検出装置1は、車両のメイン電源、及びメイン電源がオフの状態であっても供給される、+B電源によって電力が供給されている。
【0014】
ヨーレートセンサー10は、例えばMEMS(Micro Electro Mechanical Systems)センサーであり、振動子15と、駆動回路20と、検出回路25と、を備える。
【0015】
振動子15は、車両の鉛直軸に直交する第1の方向に励振されると共に、車両の鉛直軸及び第1の方向に直交する第2の方向に振動可能に構成される。振動子15の周囲には励振用及び振動検出用の複数の電極が配設されており、それぞれが振動子15との間の静電容量の変化を駆動回路20及び検出回路25に出力している。そして、振動子15が第1の方向に駆動されているときに鉛直軸周りの角速度が発生すると、コリオリ力によって第2の方向に振動が発生する。
【0016】
ヨーレートセンサー10は、第2の軸方向の振動の大きさを検出することにより、鉛直軸周りの角速度を検出する。なお、振動子15の形状や電極の配設位置について特段の制限はなく、如何なるものを用いても構わない。
【0017】
駆動回路20は、例えばVCO(Voltage-Controlled Oscillator)等を有するPLL(Phase-Locked Loop)回路を基本として構成され、振動子15の周囲に配設された励振用の電極に駆動信号(AC成分を有する電圧信号)を出力する。これにより、振動子15は一定の周期で上記第1の方向に励振される。なお、これに限らず、モーターやソレノイドを用いて機械的に振動子15を振動させる構成であってもよい。
【0018】
検出回路25は、振動子15の周囲に配設された電極により検出された静電容量を電圧に変換する(Q/V変換)すると共に、これを復調して、振動子15の第2の方向の振動に応じた信号を生成する。そして、この信号に対して周期的な反転処理を行なって検波信号を生成し、積分器等によって検波信号を平均化し、オペアンプ等を介して増幅等の処理を行なって角速度信号を生成する。
【0019】
ここで、このような構成のヨーレートセンサー10が有する問題点について説明する。ヨーレートセンサー10では、温度変化や経年劣化等により、静止時の出力値や角速度の変化に対する出力値の傾きが変化する場合がある。図2は、係る様子を示す図である。
【0020】
そこで、本実施例の車載角速度検出装置1では、駐車場等に設置されているターンテーブルに車両が乗せられた際に、このターンテーブルの角速度を取得するターンテーブル角速度取得装置30を備え、車両がターンテーブルにより回動しているときに検出回路25から出力された角速度と、ターンテーブル角速度取得装置30により取得されたターンテーブルの角速度との比較に基づいて、検出回路25の角速度算出傾向(ゲイン)を修正することとした。
【0021】
ターンテーブル角速度取得装置30は、例えばユーザーにより角速度の入力が行なわれるタッチパネル、スイッチ、音声入力装置等の入力装置である。また、これに限らず、車載ナビゲーション装置50の地図データベース52にターンテーブルの角速度に関する情報が記憶されていてもよいし、駐車場等に設置された通信装置からターンテーブルの角速度に関する情報を受信してもよい。一度入力又は取得されたターンテーブルの角速度については、地図データベース52に記憶されるものとすると好適である。
【0022】
そして、修正処理は、制御装置40によって実行される。制御装置40は、例えばCPU(Central Processing Unit)42を中心としてROM(Read Only Memory)やRAM(Random Access Memory)44等がバスを介して相互に接続されたマイクロコンピューターである。
【0023】
ヨーレートセンサー10の出力値は、車両がターンテーブルを有する駐車場内に在るときに、所定周期でサンプリングされてRAM44に記憶される。係る処理は、車両のメイン電源がオフの状態であっても、スイッチ46がオン状態とされて+B電源を用いて行なわれる。また、制御装置40には、車速やIG(イグニッション)信号等、車両の状態を示す各種信号が入力される。
【0024】
ターンテーブルを有する駐車場内に車両が在るか否かは、車載ナビゲーション装置50がGPS(Global Positioning System)等により特定した車両の現在位置特定と、地図データベース52とのマッチングにより行なわれる。地図データベース52には、主要な施設に付随する駐車場の座標、及びターンテーブルの有無に関する情報が記憶されている。
【0025】
なお、検出回路25が制御装置40の機能を有するものとしてもよいし、車載ナビゲーション装置50の制御コンピューターが制御装置40の機能を有するものとしてもよい。
【0026】
車両がターンテーブルにより回動しているときに検出回路25から出力される角速度は、一般的に図3に示す如き経時変化をする。制御装置40は、RAM44に記憶された角速度を読み込んで、角速度が一定の期間を特定する。具体的には、例えば、角速度の変動幅が所定値未満である状態が所定期間以上継続している期間が、角速度が一定の期間として特定される。
【0027】
そして、制御装置40は、この角速度が一定の部分における平均値、中心値等を算出し、車両がターンテーブルにより回動しているときに検出回路25から出力された角速度として扱う。
【0028】
なお、静止時の出力値を修正する処理(ゼロ点ドリフト)については既に種々の手法が公知となっているため、説明を省略する。
【0029】
図4は、制御装置40が実行する特徴的な処理の流れを示すフローチャートである。
【0030】
まず、車両が停止状態となったか否かを判定する(S100)。なお、以下の処理を開始するトリガーとなる本ステップの判定は、「イグニッションスイッチの状態がACCオフ状態となったか否か」等と任意に置換することができる。車両が停止状態となっていない場合は、車両が停止状態となるまで待機する。
【0031】
車両が停止状態となると、車両がターンテーブルの有る駐車場内に在るか否かを判定する(S102)。車両がターンテーブルの有る駐車場内にない場合は、再度S100以下の処理を実行する。
【0032】
車両がターンテーブルの有る駐車場内に在る場合は、ヨーレートセンサー10の出力値をサンプリングしてRAM44に記憶させる(S104)。
【0033】
そして、車両が再始動されるまで待機し(S106)、RAM44にヨーレートセンサー10の出力値データが存在するか否かを判定する(S108)。RAM44にヨーレートセンサー10の出力値データが存在しない場合は、本フローの1ルーチンを終了する。なお、S106の判定は、S100と対応し、「イグニッションスイッチの状態がACCオン状態となったか否か」等と任意に置換することができる。
【0034】
一方、RAM44にヨーレートセンサー10の出力値データが存在する場合は、スピーカーや表示装置を用いて、ユーザーに対してヨーレートセンサー10の修正を実行するか否かの問いかけを行なう(S110)。
【0035】
ユーザーにより修正実行が選択されなかった場合は、RAM44の値をクリアして(S118)、本フローの1ルーチンを終了する。
【0036】
ユーザーにより修正実行が選択された場合は、当該ターンテーブルの角速度をユーザーに入力させる(S114)。前述した如く、本処理は、通信によってターンテーブルの角速度を取得するものであってよい。この場合、通信を行なうタイミングは本フローに何ら拘束されない。
【0037】
そして、入力(又は通信により取得)された角速度を用いて、ヨーレートセンサー10の修正を実行する(S116)。本処理は、具体的には、検出回路25が内蔵するオペアンプに制御信号を出力すること等によって実現される。
【0038】
ヨーレートセンサー10の修正を実行すると、RAM44の値をクリアして(S118)、本フローの1ルーチンを終了する。
【0039】
本実施例の車載角速度検出装置1によれば、ターンテーブルの角速度を用いてヨーレートセンサー10の修正を行なうため、角速度をより適正に計測することができる。
【0040】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【産業上の利用可能性】
【0041】
本発明は、自動車製造業や自動車部品製造業等に利用可能である。
【図面の簡単な説明】
【0042】
【図1】車載角速度検出装置1のシステム構成例である。
【図2】ヨーレートセンサー10において、温度変化や経年劣化等により、静止時の出力値や角速度の変化に対する出力値の傾きが変化する様子を示す図である。
【図3】車両がターンテーブルにより回動しているときに検出回路25から出力された角速度の一般的な経時変化を示す図である。
【図4】制御装置40が実行する特徴的な処理の流れを示すフローチャートである。
【符号の説明】
【0043】
1 車載角速度検出装置
10 ヨーレートセンサー
15 振動子
20 駆動回路
25 検出回路
30 ターンテーブル角速度取得装置
40 制御装置
42 CPU
44 RAM
46 スイッチ
50 車載ナビゲーション装置
52 地図データベース
【特許請求の範囲】
【請求項1】
車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、
前記車両の鉛直軸及び前記第1の方向に直交する第2の方向における前記振動子の変位を検出する変位検出手段と、
前記変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と
を備える車載角速度検出装置であって、
車両を回動させるターンテーブルの角速度を、前記算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、
車両が前記ターンテーブルにより回動しているときに前記算出手段により算出された角速度と、前記ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、前記算出手段の算出傾向を修正する修正手段と、
を備えることを特徴とする、車載角速度検出装置。
【請求項2】
前記ターンテーブル角速度取得手段は、ユーザー入力によってターンテーブルの角速度を取得する手段である、
請求項1に記載の車載角速度検出装置。
【請求項3】
前記ターンテーブル角速度取得手段は、車外設備との通信によってターンテーブルの角速度を取得する手段である、
請求項1に記載の車載角速度検出装置。
【請求項1】
車両の鉛直軸に直交する第1の方向に振動子を励振振動させる励振振動手段と、
前記車両の鉛直軸及び前記第1の方向に直交する第2の方向における前記振動子の変位を検出する変位検出手段と、
前記変位検出手段により検出された変位に基づいて、車両の鉛直軸周りの角速度を算出する算出手段と
を備える車載角速度検出装置であって、
車両を回動させるターンテーブルの角速度を、前記算出手段の算出結果に依らずに取得するターンテーブル角速度取得手段と、
車両が前記ターンテーブルにより回動しているときに前記算出手段により算出された角速度と、前記ターンテーブル角速度取得手段により取得されたターンテーブルの角速度との比較に基づいて、前記算出手段の算出傾向を修正する修正手段と、
を備えることを特徴とする、車載角速度検出装置。
【請求項2】
前記ターンテーブル角速度取得手段は、ユーザー入力によってターンテーブルの角速度を取得する手段である、
請求項1に記載の車載角速度検出装置。
【請求項3】
前記ターンテーブル角速度取得手段は、車外設備との通信によってターンテーブルの角速度を取得する手段である、
請求項1に記載の車載角速度検出装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−48558(P2010−48558A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−210322(P2008−210322)
【出願日】平成20年8月19日(2008.8.19)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年8月19日(2008.8.19)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]