
車載障害物情報通知装置
【課題】交差点における進行方向の障害物の存在を認識しやすい車載障害物情報通知装置を提供する。
【解決手段】経路前方に障害物が存在し(S6がYes)、且つ、障害物が歩行者等のみではない(対向車両が存在する)場合には(S8がNo)、交差点地図を、交差点への自車両の進入方向前方が画面上方向となっており、交差点を自車両とは反対方向から進入する対向車両が存在することが認識しやすいターゲットアップ表示とする。交差点地図の表示形式は逐次決定しており、自車両が交差点で右折して対向車両が自車両の進行方向に存在しなくなると、障害物は歩行者等のみと判断し(S8がYes)、交差点地図をヘディングアップ表示とする。よって、歩行者等の存在も把握しやすい。
【解決手段】経路前方に障害物が存在し(S6がYes)、且つ、障害物が歩行者等のみではない(対向車両が存在する)場合には(S8がNo)、交差点地図を、交差点への自車両の進入方向前方が画面上方向となっており、交差点を自車両とは反対方向から進入する対向車両が存在することが認識しやすいターゲットアップ表示とする。交差点地図の表示形式は逐次決定しており、自車両が交差点で右折して対向車両が自車両の進行方向に存在しなくなると、障害物は歩行者等のみと判断し(S8がYes)、交差点地図をヘディングアップ表示とする。よって、歩行者等の存在も把握しやすい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載障害物情報通知装置に関し、特に、車両が交差点を曲がる際に交差点周囲の障害物の存在を画面表示により通知する車載障害物情報通知装置に関する。
【背景技術】
【0002】
車載障害物情報通知装置として、交差点を曲がる際に対向車情報をドライバへ通知する装置が知られている(たとえば特許文献1)。また、特許文献1には、従来技術として、交差点を右折後に通過する横断歩道に歩行者が存在するかどうかを知らせる技術も開示されている。
【0003】
また、交差点地図など、車両が走行中の道路の地図を車両の表示器に表示する装置は、車載ナビゲーション装置などとして広く知られている。さらに、車載ナビゲーション装置には、表示器の画面に表示している道路地図を、車両の現時点での進行方向前方が画面上となる表示形式であるヘディングアップ表示とするか、地図の北方向が画面上となるノーズアップ表示とするかをユーザが選択できるものも広く知られている。
【0004】
さらに、地図の表示形式としては、交差点への進入方向が表示画面の上方を向く方向となる表示形式も知られている(たとえば特許文献2)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−11249号公報
【特許文献2】特開平6−265366号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術では、常にユーザが設定した表示形式で地図を表示することが一般的である。また、特許文献2のように、交差点までの距離により地図の表示形式を変更するものもあるが、特許文献2においても、交差点までの距離が所定値未満となった後は、地図の表示形式は常に同じである。
【0007】
ここで、特許文献1のように、交差点地図に障害物情報を表示して障害物を通知する場合を考えると、障害物としては、例えば、右折時の対向車両や、交差点を曲がった後の横断歩道やその周辺に存在する歩行者等がある。これらの障害物の存在をドライバが認識しやすい表示形式が望まれる。
【0008】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、交差点における進行方向の障害物の存在を認識しやすい車載障害物情報通知装置を提供することにある。
【課題を解決するための手段】
【0009】
その目的を達成するための請求項1記載の発明によれば、表示手段は、交差点地図を、地図の画面上方向を交差点に進入する前に定まる所定方向に固定する第1表示形式、および、自車両が前記交差点を曲がる際に変化する自車両方向情報に基づいて地図の画面上方向が定まる第2表示形式で前記交差点地図を表示可能となっている。そして、判断手段は、交差点周辺エリア内に存在する移動体の情報に基づいて、表示形式を、第1表示形式とするか第2表示形式とするかを判断する。
【0010】
よって、交差点周辺エリア内に存在する移動体の情報の変化により、交差点地図は、第1表示形式となったり、第2表示形式となったりするので、実際の状況に応じた分り易い表示形式の交差点地図となる。その結果、障害物の存在を認識しやすくなる。
【0011】
第2表示形式としては、請求項2のように、自車両の向きを自車両方向情報とし、自車両の進行方向前方が画面上となるよう地図の画面上方向を変化させる表示形式であるヘディングアップ表示がある。
【0012】
また、交差点周辺エリア内に存在する移動体としては、自車両とは反対方向から交差点に進入する対向車両、交差点退出路に存在する障害物などがあり、また、自車両も上記移動体に含まれる。自車両以外の移動体の存在を取得するためには、たとえば、請求項3のように、交差点周辺エリア内に存在する移動体の情報を取得する移動体情報取得手段を備える。そして、判断手段は、移動体情報取得手段が取得した移動体の情報に基づいて表示形式を判断する。
【0013】
一方、移動体の情報として自車両の位置を用いる場合には、請求項4のように、交差点周辺エリア内における自車両の位置を演算する自車位置演算手段を備える。そして、判断手段は、自車位置演算手段により演算された自車両の位置を移動体の情報として用いて表示形式を判断する。
【0014】
請求項5記載の発明は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知する車載障害物情報通知装置である。また、移動体情報取得手段は、対向車線から交差点に進入する対向車両、および、対向車線を横断後の交差道路に存在する対向車線横断後障害物の情報を取得する。そして、判断手段は、進行方向に対向車両が存在することに基づいて第1表示形式とすると判断し、対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断する。
【0015】
対向車両は、交差点へ対向車線から走行してくる車である。よって、交差点に進入する自車両の運転者にとって、対向車両が存在する方向は地図表示を見るまでもなく把握できる。そこで、進行方向に対向車両が存在することに基づいて上方向固定表示にすることで、不要な地図回転が抑止されて対向車両の存在が把握しやすくなる。
【0016】
一方で、対向車線横断後障害物(たとえば対向車線横断後の横断歩道やその周辺に存在する歩行者)は、自車両が交差点周辺エリアを走行している間に、自車両からの方向が大きく変化する。具体的には、自車両が交差点周辺エリアに入った当初は斜め前方向に存在するが、交差点にて対向車線を横断して自車両の向きが交差点退出路を進行する向きとなると、自車両に対する対向車線横断後障害物の方向は、それまでとは大きく変化する。そこで、判断手段は、対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断することで、進行方向に対向車線横断後障害物が存在することが把握しやすくなる。
【0017】
請求項6記載の発明では、判断手段は、対向車線横断後障害物が存在し、且つ、進行方向に対向車両も存在するときは第1表示形式とすると判断する。このようにすると、対向車線横断後障害物および対向車両の両方が存在する場合には、交差点を曲がるまでは第1表示形式となる。よって、対向車両に注意しなければいけない間は第1表示形式となるので、対向車両を把握しやすい。また、交差点を曲がって自車両の向きが交差点退出路を進行する向きとなると第2表示形式となるので、進行方向に対向車線横断後障害物が存在することも把握しやすい。
【0018】
請求項7記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知する車載障害物情報通知装置である。また、移動体の情報は自車両の位置としており、判断手段は、自車両が交差点を曲がる位置となるまでは第1表示形式とし、自車両が交差点を曲がった後の位置となった後は第2表示形式とすると判断する。
【0019】
このように判断すると、対向車両に注意する必要がある間は第1表示形式となるので、対向車両を把握しやすい。また、交差点にて対向車線を横断して交差道路へ進入し、自車両の向きが交差点退出路を進行する向きとなると第2表示形式となるので、進行方向の対向車線横断後障害物の存在も把握しやすい。
【0020】
請求項8記載の発明では、判断手段が判断した形式で表示手段に交差点地図を表示する地図表示制御手段を備える。
【0021】
請求項9記載の発明では、第1表示形式として、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示を行う。交差点ターゲットアップ表示で交差点地図が表示されると、走行中の道路が交差点までの間に曲がっているとしても、また、自車両が北方向へ向かっていなくても、交差点への進入方向前方が画面上となる。よって、交差点を自車両とは反対方向から進入する対向車両が存在することが把握しやすい。
【0022】
請求項10記載の発明では、路側機から交差点形状を取得する交差点形状取得手段を備える。そして、地図表示制御手段は、交差点形状取得手段が取得した交差点形状に基づいて交差点地図を作成して前記表示手段に表示する。路側機からは、その路側機が設置された交差点の交差点形状が逐次送信される場合も多い。この請求項10のようにすれば、路側機から逐次送信される交差点形状を有効に活用することができる。
【0023】
ところで、進行方向の信号が赤信号となった場合、通常、自車両は走行を停止することから、障害物の存在を通知する必要性は低下する。その一方で、赤信号での停車中は、交差点地図が表示される前の画面を確認したいことも多いと考えられる。そこで、請求項11記載の発明では、地図表示制御手段は、判断手段が判断した表示形式で交差点地図を表示した後、自車両が交差点周辺エリアに存在しているが進行方向の信号が通行禁止を示す信号となったことに基づいて、表示手段の画面を、交差点周辺エリアに入る前の画面に戻す。
【0024】
また、この請求項11記載の発明では、その後、信号が通行許可を示す信号となったことに基づいて、再度、判断手段が判断した表示形式で交差点地図を表示するので、青信号になり再走行を開始した後は、交差点地図から障害物の存在を知ることができる。
【0025】
対向車両の情報は、路側に設置された路側無線機から取得するようにしてもよいが、請求項12のように、車車間通信により対向車両の情報を取得してもよい。このようにすれば、路側無線機が設置されていない交差点においても、交差点地図に障害物図形としての対向車両情報を表示することができる。
【0026】
請求項13記載の発明では、車車間通信で他車両情報を取得する。道路形状決定手段は、この他車両情報から他車両の走行軌跡を決定し、その走行軌跡から、他車両の今後の推定進路の形状を決定する。また、自車両の走行軌跡に基づいて自車両の今後の推定進路も決定する。さらに、それら他車両の今後の推定進路の形状と自車両の今後の推定進路の形状とに基づいて、自車両の進行方向に存在する交差点の形状を決定する。地図表示制御手段は、このようにして決定した交差点の形状に基づいて交差点地図の形状を決定する。また、自車両の今後の推定進路の形状に基づいて、ターゲットアップ表示の交差点地図における上方向を決定する。
【0027】
このようにして交差点地図の形状およびその交差点地図における上方向を決定する場合には、道路地図データを利用していないことから、道路地図データを、路側機等の車両外部の装置やナビゲーション装置等の車両内部の他の装置から道路地図データを取得できなくても、交差点地図を表示することができる。
【0028】
請求項14記載の発明では、交差点地図に障害物図形を表示する障害物と自車両との距離が短くなるほど交差点地図を大きい縮尺で表示する。また、それとともに、自車両図形および障害物図形も、交差点地図の縮尺に応じた大きさで表示する。このようにすれば、交差点地図の縮尺および自車両図形、障害物図形の大きさにより、自車両と障害物との距離を把握できる。
【0029】
請求項15記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。判断手段は、交差点周辺エリア内に存在する移動体の情報に基づいて表示形式を第1表示形式と判断した後、自車両の進行方向の信号が、対向車線を横断して交差道路へ進入可能を示す矢印信号となったことに基づいて、表示形式を第2表示形式とすると判断する。
【0030】
対向車線を横断して交差道路へ進入可能を示す矢印信号となった場合には、対向車線から交差点へ車両が進入してくる可能性は低い。そこで、本発明では、上記矢印信号となった場合には、表示形式を第2形式とすることで、対向車線を横断した後の障害物の存在を認識しやすくしているのである。
【0031】
請求項16記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。また、第1表示形式は、交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示とする。また、路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段を備える。判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードから対向車線を横断したことを示すノードまでの間の何れかのノードである表示切り替えノードを自車両が越えたと判断したことに基づいて、表示形式を第1表示形式から第2表示形式へ切り替えると判断する。
【0032】
このようにすれば、自車両の位置が表示切り替えノードを越えるまでは、交差点地図の上方向が自車両の交差点への進入方向となっている交差点ターゲットアップ表示で交差点地図が表示されるので、対向車両を認識しやすい。また、表示切り替えノードを越えて、交差道路の横断歩道が進行方向の前方に存在する状況では、対向車線を横断した後の交差道路が認識し易い第2表示形式で交差点地図が表示されるので、対向車線を横断した後の障害物の存在も認識しやすい。
【0033】
請求項17記載の発明では、第2表示形式を、道路線形情報取得手段が取得したノードのうち、表示切り替えノード以降の2つのノードを結ぶ方向を前記自車両方向情報とし、それら2つのノードのうち進行方向前側のノードを画面上方向とする表示形式であるノードターゲットアップ表示とする。
【0034】
自車両は、ノードに近い位置を通過しつつ交差点を通過する。よって、ノードを結んだ方向により画面上方向を決定するようにすれば、自車両が、車両向きを検出するセンサを備えていなくても、自車両の向きの変化に対応して交差点地図の画面上方向を変化させることができる。
【0035】
請求項18記載の発明では、表示切り替えノードを自車両が越えたと判断した場合のノードターゲット表示は、横断歩道開始ノードと横断歩道終点ノードと結ぶ方向であって横断歩道終点ノードを画面上方向とする。
【0036】
表示切り替えノードを越えた時点では、自車両は、まだ、交差点退出路方向を向いていないが、本発明では、この時点で、交差点退出路の横断歩道が画面上方向となる交差点地図が表示されるので、その横断歩道に存在する障害物をより認識しやすくなる。
【0037】
請求項19記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。また、第1表示形式は、交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示とする。また、路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段と、対向車線から交差点に進入する対向車両の情報を取得する対向車両情報取得手段とを備える。判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードまでに、自車両が交差点内で停止した場合には、表示形式を第1表示形式から第2表示形式へ切り替えると判断する一方、その待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、対向車両が存在する場合には、自車両の位置が待機位置ノードを越えても表示形式を第1表示形式に維持する。
【0038】
自車両が交差点内で停止した場合には、自車両のドライバは、交差点に進入する対向車両に注意を払っていると推定することができる。そこで、自車両が交差点内において待機位置ノードまでに停止した場合には、表示形式を第1表示形式から第2表示形式へ切り替えることで、次に注意を払う必要がある、対向車線を横断した後の障害物の存在を認識し易くする。一方で、待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、対向車両が存在する場合には、自車両の位置が待機位置ノードを越えても表示形式を第1表示形式に維持することで、対向車両の存在に気づきやすくしている。
【0039】
請求項20記載の発明では、判断手段は、自車両が交差点から予め設定された三次元表示距離内に位置している場合には、画面上側ほど縮尺が小さくなる三次元的な表示態様で交差点地図を表示すると判断し、自車両が三次元表示距離外に位置している場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で交差点地図を表示すると判断する。
【0040】
この発明では、自車両が交差点に近い位置にいる場合には、実際の景観により近い表示態様である三次元的な表示態様で交差点地図が表示される。よって、交差点地図から、交差点周辺エリアに存在する障害物が認識しやすくなる。また、自車両が交差点から遠い場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で交差点地図が表示されるので、自車両から遠い位置までの距離を把握しやすい。
【0041】
請求項21記載の発明では、判断手段は、交差点の大きさを示す交差点サイズ値が、基準サイズ値以上であれば、移動体の情報に基づいて表示手段における表示形式を第1表示形式とするか第2表示形式とするかの判断を行うが、交差点サイズ値が基準サイズ値よりも小さい場合にはその判断を行わず、交差点地図の表示形式を第1表示形式と判断する。
【0042】
交差点ターゲットアップ表示(第1表示形式)は、自車両が待機位置ノードを通過して進行方向が変化した場合に、交差点地図の上方向が進行方向前方を示さない状態となる。交差点が大きい場合、自車両が待機位置ノードを通過して進行方向が変化した後も、交差点ターゲットアップ表示を維持するとすれば、交差点地図の上方向が進行方向前方を示さない状態が比較的長く続くことになるため、ドライバが違和感を覚える恐れがある。そこで、交差点サイズ値が基準サイズ値以上となる大きな交差点では、第1表示形式から第2表示形式への変更を判断するのである。一方、小さな交差点では、表示形式を変更しても、変更後の形式で表示している期間は短時間であり、短時間のみの表示形式の変更によってドライバが煩わしさを感じてしまう恐れもある。そこで、交差点サイズ値が基準サイズ値よりも小さい場合には、表示形式を変更しないようにしている。
【図面の簡単な説明】
【0043】
【図1】運転支援システム1の全体構成を示す図である。
【図2】図1の路側無線機10、路側カメラ20、光ビーコン30の設置位置を例示する図である。
【図3】車載装置100の構成を示す図である。
【図4】交差点地図を例示する図である。
【図5】演算装置170が行う処理を示すフローチャートである。
【図6】図5のステップS9のヘディングアップ表示の処理を詳しく示すフローチャートである。
【図7】交差点に対する自車両Aの位置および向き(左図)と、各左図に対応する回転処理後の交差点地図(右図)を示す図である。
【図8】図5のステップS7、10のヘディングアップ表示の処理を詳しく示すフローチャートである。
【図9】交差点ターゲットアップ表示を、実際の道路形状、および、他の表示形式と比較して示す図である。
【図10】交差点ターゲットアップ表示において、交差点地図の縮尺の変化を例示する図である。
【図11】車車間通信により交差点ターゲットアップ表示の交差点地図を作成して表示する例を説明する図である。
【図12】道路線形情報を説明する図である。
【図13】第2実施形態において、演算装置170が行う処理を示すフローチャートである。
【図14】第2実施形態における交差点地図の変化を例示する図である。
【図15】第2実施形態における交差点地図の変化を例示する図である。
【図16】第3実施形態において演算装置170が行う処理を示すフローチャートである。
【図17】ノードターゲットアップ表示を説明する図である。
【図18】第4実施形態において演算装置170が行う処理を示すフローチャートである。
【図19】第4実施形態における交差点地図の変化を例示する図である。
【図20】第5実施形態において演算装置170が行う処理を示すフローチャートである。
【図21】第6実施形態における交差点地図の変化を例示する図である。
【発明を実施するための形態】
【0044】
以下、本発明の実施形態を図面に基づいて説明する。以下に示す実施形態は、左側通行が法制化されている地域に対応した実施形態であり、右側通行が法制化されている地域では、以下の実施形態と左右が逆になる。
【0045】
(第1実施形態)
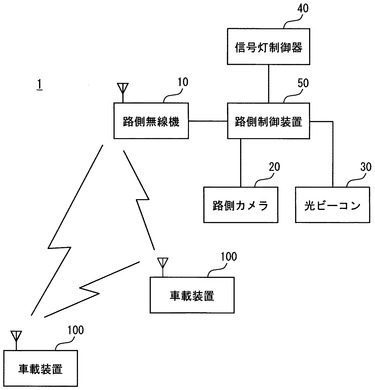
図1は、運転支援システム1の全体構成を示す図である。この図1に示すように、運転支援システム1は、路側無線機10、路側カメラ20、光ビーコン30、信号灯制御器40、路側制御装置50を備えている。これらは、インフラ側の装置である。運転支援システム1は、これらインフラ側の装置と、車両に搭載される車載装置100とを備えている。
【0046】
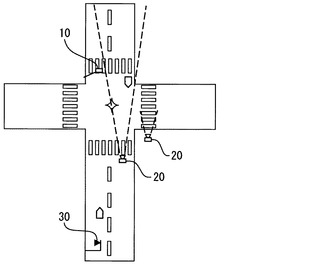
路側無線機10は、交差点の所定位置、たとえば、図2に示すように、交差点周囲の横断歩道の上付近に設けられており、360°全範囲に渡り、700MHz帯もしくは5.9GHz帯など所定の周波数帯の電波を用いて、この交差点の周囲に種々の交差点情報を送信する。この交差点情報には、路側無線機10が設けられている交差点の信号機の信号サイクルを示す情報、交差点に進入する道路を走行している障害物(車両など)の有無や位置を示す情報、交差点周囲の横断歩道およびその横断歩道の周辺に障害物が存在するか否かを示す情報が含まれる。
【0047】
路側カメラ20は、路上に設置され、交差点に進入する車を撮影できるように、交差点へ向かう側の車線に対して交差点を挟んだ位置の道路上方に設けられる。また、それとは別に、交差点周囲の横断歩道を撮像できるように、交差点周囲の歩道上方にも設けられる
(図2参照)。なお、図2には、図示の都合上、道路上方に設置された路側カメラ20および歩道上方に設置された路側カメラ20をそれぞれ1台ずつ示してあるが、実際には、道路上方に設置された路側カメラ20は、交差点に進入する各道路を撮像可能な台数が設けられており、また、横断歩道を撮像する路側カメラ20も、各横断歩道が撮像可能な台数が設けられている。これら路側カメラ20と路側制御装置50とは有線により接続されており、路側カメラ20は、撮影した画像を路側制御装置50へ逐次出力する。
【0048】
光ビーコン30は、交差点通過後などの種々の位置において、道路上方に車線毎に配置されている。これら光ビーコン30は、道路を通過する車両に向けて連続的に道路交通情報、次の交差点までの距離、次の交差点の道路形状、交差点において交差する複数の道路においてこの光ビーコン30が設置されている道路を特定する走行道路特定情報(四叉路であれば4本の道路のうちのどれかを特定する情報)、交差点の信号灯色の情報等の所定の情報を送信する。走行道路特定情報は、路側無線機10がその路側無線機10の周囲全体に送信する道路線形情報が示す交差点道路形状において、自車両が存在する道路の特定に用いる。
【0049】
また、光ビーコン30は、車両に搭載された光ビーコンアンテナ150との双方向通信により車両が光ビーコン30の下を通過したことを検知する。光ビーコン30と路側制御装置50との間も有線により接続されており、光ビーコン30は、車両が通過したことを検知すると、そのことを示す信号を路側制御装置50へ送信する。なお、路側カメラ20や光ビーコン30と路側制御装置50との間の通信は無線により行われてもよい。
【0050】
信号灯制御器40は、交差点に設置された信号灯の灯火色を所定の順番で周期的に切り替える。また、信号灯制御器40は、信号灯の灯火色を示す情報を路側制御装置50へ逐次送信する。
【0051】
路側制御装置50は、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することで、この路側制御装置50は、障害物検出処理、情報送信処理を実行する。障害物検出処理においては、路側カメラ20によって撮像された画像を解析することで、交差点に進入する道路を走行している障害物を検出し、また、横断歩道やその周辺に存在する障害物を検出する。
【0052】
情報送信処理においては、障害物検出処理により検出した障害物の位置、現時点から所定サイクル分(たとえば2サイクル分)の信号灯の灯火色、および、予め記憶されている交差点の道路形状を、路側無線機10から逐次送信する。
【0053】
次に、車載装置100の構成について図3を用いて説明する。この車載装置100は、特許請求の範囲の車載障害物情報通知装置に相当する。車載装置100は、車速センサ110、表示器120、スピーカ130、車載無線機140、光ビーコンアンテナ150、および、これらと車内LAN160により接続された演算装置170を備えている。
【0054】
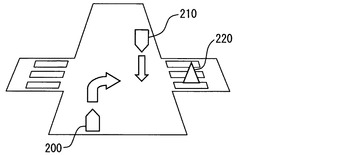
車速センサ110は、車速に比例する車速パルスを検出し、その車速パルスあるいは車速パルスから定まる車速信号を演算装置170へ出力する。表示器120は、特許請求の範囲の表示手段に相当し、車室内の所定位置に運転席から視認可能に設置され、表示器120の画面の所定領域に、交差点地図が表示される。この交差点地図は、たとえば、図4に示すものである。図4に示す交差点地図は、交差点およびその周辺を、交差点に進入する前の自車両が走行している側の斜め上方から見た三次元的地図であり、実際の交差点形状とは関係なく、その形状が予め記憶されたものである。ただし、この図4とは異なり、実際の交差点の形状(道路の交差角度等)を反映した交差点地図としてもよいし、また、交差点地図は二次元地図であってもよい。実際の交差点の形状を反映した交差点地図とする場合には、車内の他の装置(ナビゲーション装置など)から道路地図データを取得して交差点地図を作成してもよいし、また、路側無線機10から送信される交差点形状(交差点を構成する道路の形状を示す道路線形情報)を車載無線機140により取得し、その取得した交差点形状に基づいて交差点地図を作成してもよい。上記道路線形情報は、具体的には、交差点の形状をノード、リンクにより示すものであり、一部のノードにはノード属性が付与されている。なお、この場合、車載無線機140は交差点形状取得手段に相当する。
【0055】
交差点地図には、自車両を示す自車両図形200が重畳表示される。また、対向車両が存在すると判断された場合には、交差点を挟んで反対側に対向車両図形210が重畳表示され、横断歩道やその周辺に障害物が存在すると判断された場合には、横断歩道上に右折後障害物図形220が重畳表示される。これら対向車両図形210、右折後障害物図形220は、特許請求の範囲の障害物図形に相当する。スピーカ130からは、交差点地図上に図形210、220が表示される際に所定の音が出力される。
【0056】
車載無線機140は、路車間通信機としての機能と車車間通信機としての機能とを備えている。路車間通信機としては、路側無線機10から送信される電波を受信し、受信した電波を復調して演算装置170へ出力する。また、車車間通信機としては、他車両に搭載された車載無線機140との間で信号の送受信を行う。光ビーコンアンテナ150は、路上に設けられている前述の光ビーコン30との間で信号の送受信を行う。
【0057】
演算装置170は、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することで、この演算装置170は、表示器120の表示画面に交差点地図を表示する地図表示処理を行う。
【0058】
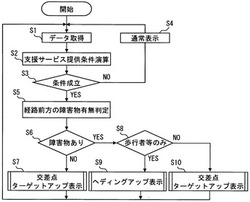
図5は、演算装置170が行う地図表示処理を詳しく示すフローチャートである。演算装置170は、電源ONとなっている間、この図5に示す処理を所定周期で実行する。ステップS1では、次のステップS2において支援サービス提供条件を演算するための予め定められたデータを取得する。
【0059】
続くステップS2では、ステップS1で取得したデータに基づいて、支援サービス提供条件を演算する。本実施形態での支援サービスとは、交差点を右折する際に、障害物の存在をドライバに通知するサービスであり、提供条件は、支援サービスエリア(特許請求の範囲の交差点周辺エリアに相当する)に入っていること、および、右ウィンカがONとなっていることである。
【0060】
支援サービスエリアは、交差点の手前の所定位置から交差点を右折した後の所定位置までであり、エリアの開始位置は、交差点からの距離や座標により定めてもよいが、光ビーコン30を通過した位置や、路側無線機10からの信号を車載無線機140が受信できるようになった位置を開始位置とすることもできる。交差点からの距離により開始位置が定まる場合には、地図情報に開始位置を予め記憶しておき、ナビゲーション装置から現在位置情報を取得して開始位置を判断する。エリアの終了位置は、交差点からの距離や座標により定めてもよいが、ここでは、エリア開始位置からの距離により定めるものとし、ステップS2では、エリア開始位置からの走行距離を演算する。
【0061】
続くステップS3では、上述の支援サービス提供条件が成立したか否かを判断する。この判断が否定判断である場合にはステップS4へ進む。ステップS4では、表示器120の表示画面を通常表示とする。この通常表示は、交差点地図が表示されている状態であれば、その交差点地図が表示される前の表示であり、交差点地図が表示されていない状態であれば、そのままの表示である。交差点地図が表示される前の表示としては、表示器120がナビゲーション装置の表示器としても利用されている場合には、たとえば、ナビゲーション装置の地図データに基づいて表示される二次元的な地図表示がある。
【0062】
ステップS3で支援サービス提供条件成立と判断(肯定判断)した場合にはステップS5へ進む。ステップS5では、自車両の経路前方の障害物の有無を判定する。ここで、経路は交差点を右折する経路であり、前方には、現時点での自車両の前方のみならず、交差点において進行方向を変更した後の将来的な前方も含み、また、直前方のみならず斜め前方向も含む。そのため、右折後に通過する横断歩道やその周辺に障害物が存在する場合も障害物有りと判定する。一方、自車両が交差点退出路の方向を向いた後では、交差点流入路を走行する車両(右折前の対向車両)の位置は自車両の前方ではないことから、自車両が交差点退出路の方向を向いた後では、交差点流入路を走行する車両が存在していても、ここでの障害物には該当しない。なお、障害物は、自車両が道路を走行する際に衝突する可能性がある物体である。この障害物には、移動中の物体のみではなく、一時的に静止している静止物も含むが、固定物は含まない。ステップS5の判定は、路側制御装置50の検出結果を路側無線機10から取得するとともに、車内LAN160を介して、自車両の位置や向きの情報を取得する。また、対向車両については、車車間通信により、その存在を直接検出してもよい。なお、路側制御装置50の検出結果や、車車間通信による対向車両の存在は、交差点周辺エリア内に存在する移動体の情報を示すものであることから、これらを取得する車載無線機140は、特許請求の範囲の移動体情報取得手段に相当する。
【0063】
続くステップS6では、ステップS5の判定結果が障害物有りか否かを判断する。障害物なしと判断(否定判断)した場合、ステップS7へ進む。ステップS7では、地図の画面上方向を交差点に進入する前に定まる方向に固定する第1表示形式の一形式であり、交差点へ進入する直近の自車両の進行方向前方が画面上となる表示形式である交差点ターゲットアップ表示を行う。この交差点ターゲットアップ表示の詳細処理は図8を用いて後述する。
【0064】
ステップS6で障害物有りと判断(肯定判断)した場合にはステップS8へ進む。ステップS8では、障害物が、歩行者等のみであるか否かを判断する。歩行者等とは、右折後に自車両が通過する横断歩道やその周辺に存在する障害物を意味し、歩行者のみではなく、たとえば自転車も含む。また、この歩行者等は、特許請求の範囲の対向車線横断後障害物に相当する。
【0065】
ステップS8で歩行者等のみと判断(肯定判断)した場合にはステップS9へ進む。ステップS9では、自車両の現時点での進行方向前方が画面上となるように画面上方向を変化させる表示形式であるヘディングアップ表示を行う。このヘディングアップ表示の詳細処理は図6を用いて後述する。一方、ステップS8で歩行者等のみではないと判断(肯定判断)した場合、対向車両も存在すると判断したことになる。この場合、ステップS10へ進み、交差点ターゲットアップ表示を行う。このステップS10の処理はステップS7と同じである。
【0066】
本実施形態では、ステップS6〜S10の説明から明らかなように、障害物として経路前方に存在する対向車両を含む場合には交差点ターゲットアップ表示となり、障害物が歩行者等のみの場合にはヘディングアップ表示となる。また、ある支援サービスエリアに入った当初は、対向車両も歩行者もなしの場合(S6:NO)には交差点ターゲットアップ表示となり(S7)、方向者のみの場合(S8:YES)にはヘディングアップ表示となる(S9)。また、対向車両も歩行者もありの場合(S8:NO)にも、当初、交差点ターゲットアップ表示となる(S10)。ただし、ステップS5で説明したように、自車両が交差点退出路の方向を向いた後では、対向車両は経路前方の障害物に含まれない。よって、当初、交差点ターゲットアップ表示だったとしても、自車両が交差点退出路の方向を向いた後では、歩行者のみと判断し(S8:YES)、ヘディングアップ表示に切り替えることになる。なお、ステップS5、S6、S8は、特許請求の範囲の判断手段に相当し、ステップS7、S9、S10は地図表示制御手段に相当する。
【0067】
ここで、上記ステップS8の歩行者のみか否かの判断についてさらに説明する。歩行者ありか否かの判断は、路側無線機10が送信し車載無線機140が受信する障害物検出結果に基づいて判断する。しかし、路側無線機10は、障害物検出結果を送信先の特定をせずに送信(ブロードキャスト送信)していることから、障害物検出結果には、歩行者の存在のみではなく、車両の存在も含まれる。そこで、自車両が交差点退出路の方向を向いた後では、路側無線機10から送信される障害物検出結果のうち、車両の存在を示す情報は無視して、ステップS8の判断を行う。
【0068】
また、自車両が交差点退出路の方向を向いたことの判断は、自車両の方位を検出するセンサからの信号を用いて行なってもよいが、交差点を曲がる際の自車両の向きは、自車両の位置によりほぼ定まる。具体的には、自車両が交差点の待機位置を越えて対向車線に差し掛かった状態では、自車両の向きは交差点退出路の方向になっているか、少なくとも、交差点退出路の方向に近い向きとなっている。そして、自車両が対向車線を横断した状態では、自車両が交差点退出路の方向を向いたと考えてよい。そこで、自車両の位置が交差点待機位置を越えたこと、より確実には、自車両の位置が対向車線を横断した位置となったことにより、対向車両なし、すなわち、歩行者のみと判断して(S8:YES)、ヘディングアップ表示に切り替えてもよい。
【0069】
なお、自車両の位置が交差点待機位置を越えた、あるいは、対向車線を横断したことの判断は、たとえば、路側無線機10から送信される道路線形情報を用いて行なう。この道路線形情報には、前述のように、ノード、ノード属性が含まれている。ノード属性としては、たとえば、図12に示すように、ノード410cにはノード属性「交差点内右折待ち」(特許請求の範囲の待機位置に相当)が付与され、ノード410dにはノード属性「対向方路との交点」が付与され、ノード410eにはノード属性「横断歩道開始」が示され、ノード410fにはノード属性「横断歩道終点」が付与されている。そこで、ノード属性「交差点内右折待ち」が付与されているノード410cを自車両が越えたことにより、自車両の位置が交差点待機位置を越えたと判断する。また、ノード属性「対向方路との交点」が付与されているノード410dを自車両が通過したことにより、対向車線を横断したと判断する。また、自車両が上記ノード410を越えたことの判断は次のようにして行う。まず、起点である光ビーコン通過位置から、ノード間距離、すなわち、リンクの長さを足し算することにより、上記ノード410までの距離を算出する。一方、光ビーコン通過時からの自車両の走行距離をタイヤ回転数に基づいて算出する。これら2つの距離を比較することで、自車両が上記ノード410を越えたか否かの判断を行う。
【0070】
次に、図6を用いてヘディングアップ表示の詳細処理を説明する。まず、ステップS61では、自車両の現時点での進行方位を決定し、その方位を画面上とする。自車両の現時点での進行方位は、たとえば、地磁気センサからの信号により判断したり、ジャイロセンサ、ステアリング操舵角の信号を単独で、あるいは、適宜組み合わせて進行方位を判断する。また、道路線形情報として取得できる複数のリンクのうち、自車両がどのリンクに位置するかを、自車両がノード410を越えたか否かの判断と同様にして行なって、自車両が位置しているリンクの向きを自車両の進行方位としてもよい。また、ナビゲーション装置において、自律航法や電波航法により進行方位が逐次決定されており、ナビゲーション装置からその進行方位が取得できる場合には、ナビゲーション装置から進行方位を取得する。
【0071】
続くステップS62では、自車、支援対象交差点、障害物が、表示器120に設定された交差点地図表示領域に収まる範囲で、できるだけ大きい縮尺を算出する。より詳しくは、障害物(ヘディングアップの場合には歩行者等)と自車両との間の距離を算出し、その距離、および、距離から縮尺を算出する予め記憶された関係式から、地図の縮尺を算出する。
【0072】
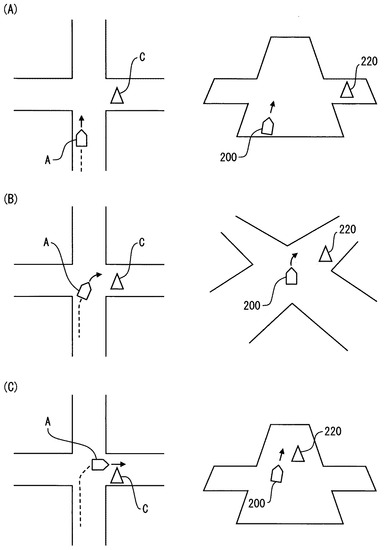
ステップS63では、ステップS61で求めた画面上方向、および、ステップS62で算出した縮尺で交差点地図を表示する。より詳しくは、ステップS63では、基本となる交差点地図(予め記憶してある地図や、道路地図データから定まるもの)を、ステップS61で求めた方向が画面上方向となるように回転処理を行う。図7(A)(B)の各左図は、交差点に対する自車両Aの位置および向きの実際の状況であり、右図は、各左図に対応する回転処理後の交差点地図である。なお、左図において、符号Cは歩行者である。
【0073】
同図(A)は、左図に示すように、自車両Aが交差点に進入する前の状態であり、この状態では、右図に示すように、交差点地図は、走行中の道路が上下方向に延びており、右折後の交差点退出路は左右方向に延びている。
【0074】
同図(B)は、左図に示すように、自車両Aが停止線を越えて交差点に進入し、進行方向が少し右方向に変化した状態である。この状態では、右図に示すように、交差点地図は、それまで走行していた道路(交差点流入路)が左斜め上方向から右斜め下方向に延び、これから走行する道路(交差点退出路)が右斜め上方向から左斜めした方向に延びている。
【0075】
同図(C)は、左図に示すように、自車両Aが交差点においてほぼ方向を変え終え、交差点退出路にほぼ沿った方向となった状態である。この状態では、右図に示すように、交差点地図は、交差点退出路が上下方向に延び、交差点流入路が左右方向に延びている。
【0076】
この図7に例示したような回転処理を行った後、ステップS63では、さらに、その回転後の交差点地図を、ステップS62で算出した縮尺に基づいてサイズ変更を行って、そのサイズ変更後の交差点地図を表示器120に表示する。また、自車両図形200、右折後障害物図形220も交差点地図の縮尺に応じた大きさで表示する。
【0077】
右折後の交差点退出路に存在する歩行者等は、図7の左図からも分かるように、自車両の進行に従って、自車両に対する方位が大きく変化する。ヘディングアップ表示は、自車両の現時点での進行方位を画面上とすることから、自車両に対する方位が大きく変化する歩行者等であっても、ヘディングアップ表示とすれば、ドライバは、歩行者等の進行方向に存在することを混乱なく把握することができる。
【0078】
次に、図8を用いて交差点ターゲットアップ表示の詳細処理を説明する。まず、ステップS81では、支援対象交差点への進入方向を画面上方向と決定する。この支援対象交差点への進入方向は、具体的には、交差点へ進入する直近のリンク方向であって交差点内のノード端が上方向となる方向である。この進入方向は、図12に、矢印400で示す方向である。
【0079】
続くステップS82では、自車、支援対象交差点、障害物が、表示器120に設定された交差点地図表示領域に収まる範囲で、できるだけ大きい縮尺を算出する。より詳しくは、障害物(交差点ターゲットアップの場合には、少なくとも対向車両が存在する)と自車両との間の距離を算出し、その距離、および、距離から縮尺を算出する予め記憶された関係式から、地図の縮尺を算出する。ステップS83では、ステップS81で求めた画面上方向、および、ステップS82で算出した縮尺で、交差点地図を表示する。また、自車両図形200、対向車両図形210、右折後障害物図形220も交差点地図の縮尺に応じた大きさで表示する。
【0080】
交差点ターゲットアップ表示は、交差点に進入する直近の自車両の進入方向前方が画面上となる表示形式であることから、現時点での自車両の向きによらず、図4に例示するように、交差点進入前の道路が画面上下方向となる。ここで、この交差点ターゲットアップ表示の利点を説明する。
【0081】
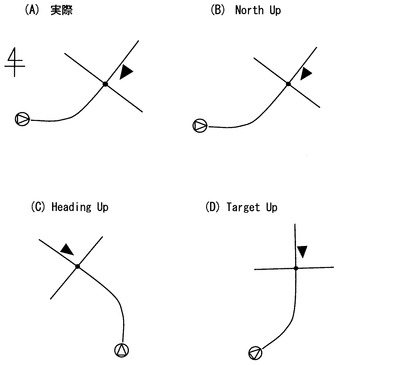
図9は、交差点ターゲットアップ表示を、実際の道路形状および他の表示形式と比較して示す図である。同図(A)は、交差点地図を表示する交差点やその周辺の実際の道路形状の概略図であり、同図(B)、(C)、(D)は、それぞれ、ノーズアップ表示、ヘディングアップ表示、交差点ターゲットアップ表示である。
【0082】
図(A)に示すように、自車両(同図における白三角印を丸で囲んだ図形)が走行中の実際の道路は、自車両の位置から交差点までの間に曲がっており、自車両が走行中の道路は、現時点では略東方向に延びているが、交差点付近においては、略北東方向に延びている。また、この走行中の道路と交差する道路は、走行中の道路と略直角に交差している。
【0083】
ノーズアップ表示では北方向が画面上となるので、図(B)に示すように、交差点周辺では、自車両の交差点流入路と流出路は、いずれも斜め方向に延びる道路として示される。また、ヘディングアップ表示では現時点での進行方向が画面上となるので、実際の状態が図9(A)の状態の場合には、同図(C)に示すように、自車位置に対して交差点が左上方向に示される。これらノーズアップ表示やヘディングアップ表示は、走行中の道路が延びている向きや、走行中の車両の向きにより、支援対象の交差点の表示位置や表示角度が変化してしまう。これに対して、交差点ターゲットアップ表示は、常に、図(D)に示すように、交差点への進入方向が画面上方向となる表示形式である。従って、図(A)のように、自車両の現在位置から交差点までの実際の道路形状が曲がっており、且つ、自車両が走行している道路が交差点において南北方向に延びていない場合であっても、交差点への進入方向が画面上方向となる。そのため、交差点を自車両とは反対方向から進入する対向車両が存在することが把握しやすくなる。
【0084】
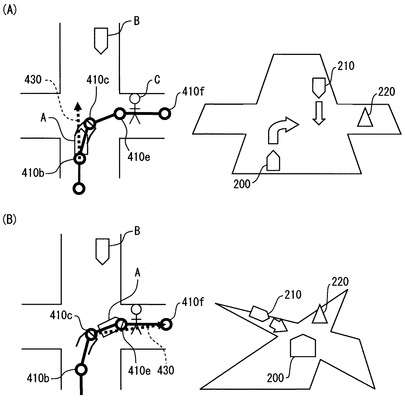
図10は、交差点ターゲットアップ表示において、交差点地図の縮尺の変化を例示する図である。同図(A)、(B)ともに、左図は、自車両Aと対向車両Bとの実際の位置関係を示す図であり、右図が、左図に対応した交差点地図の表示例である。また、図(A)は、自車両Aと対向車両Bとの間の距離が比較的長い場合の表示例であり、図(B)は、自車両Aと対向車両Bとの間の距離が比較的短い場合の表示例である。
【0085】
この図10に示すように、自車両Aと対向車両Bとの間の距離が短いほど、自車両図形200や対向車両図形210は大きく表示されるので、自車両Aと対向車両Bとの間の距離を、交差点地図から把握することができる。
【0086】
以上、説明した本実施形態によれば、自車両の進行方向に対向車両が存在する場合には、交差点地図を、交差点への自車両の進入方向前方が画面上方向となる交差点ターゲットアップ表示としていることから、対向車両の存在が把握しやすい。また、交差点地図の表示形式は逐次決定しており、当初(右折前)は、自車両の進行方向に対向車両が存在するとしても、自車両が交差点で右折し、対向車線を横断し終わると、対向車両は自車両の進行方向には存在しなくなる。そして、対向車線を横断し終わり、対向車両が自車両の進行方向に存在しない状態となり、且つ、歩行者等が存在すると判断した場合には、交差点地図をヘディングアップ表示としている。よって、歩行者等の存在も把握しやすい。
【0087】
前述の実施形態では、自車両の経路前方に障害物(対向車両・歩行者等)が存在するか否かにより、交差点ターゲットアップ表示とするかヘディングアップ表示とするかを切り替えていた。しかし、障害物の存否に代えて、交差点に対する自車両の位置により、表示形式を切り替えるようにしてもよい。具体的には、自車両が交差点を曲がり、その進行方向が交差点退出路を向く位置を交差点内に設定し、その位置を表示切り替え位置とする。そして、その表示切り替え位置よりも交差点進入方向手前では交差点ターゲットアップ表示を設定し、その表示切り替え位置よりも交差点退出方向ではヘディングアップ表示とする。上記表示切り替え位置は、仮に対向車両が存在するとしても、その対向車両が経路前方ではなくなる位置である。よって、対向車両に注意する必要がある間は交差点ターゲットアップ表示となるので、対向車両を把握しやすい。また、交差点を右折して自車両の向きが交差点退出路を進行する向きとなるとヘディングアップ表示となるので、経路前方の歩行者等の存在も把握しやすい。なお、この態様においては、自車両の位置は演算装置170が逐次演算する。すなわち、この態様においては、演算装置170は自車位置演算手段として機能する。
【0088】
以下の実施形態は、交差点に対する自車両の位置により表示形式を切り替える実施形態である。なお、以下の説明において、それまでに使用した符号と同一番号の符号を有する要素は、特に言及する場合を除き、それ以前の実施形態における同一符号の要素と同一の要素である。
【0089】
(第2実施形態)
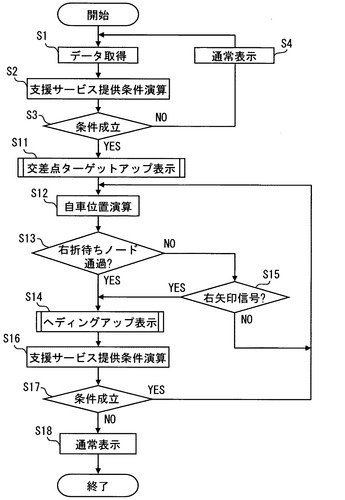
次に、第2実施形態を説明する。第2実施形態も、機械的構成は第1実施形態と同じである。図13は、第2実施形態において、演算装置170が行う処理を示すフローチャートである。
【0090】
図13において、ステップS1〜S4は、図5と同じ処理である。ステップS3において、支援サービス提供条件が成立したと判断した場合には、ステップS11に進み、図5のステップS7と同じ処理を行なうことにより、交差点ターゲットアップ表示で交差点地図を表示する。
【0091】
ステップS12では、交差点に対する自車両の位置の演算を行なう。自車両の位置の演算は、ここでは、光ビーコン30の通過を起点として、そこからの走行距離をタイヤ回転数に基づいて演算する処理とする。
【0092】
ステップS13では、上記ステップS12で演算した自車位置が交差点内右折待ちノード410cを越えたか否かを判断する。この第2実施形態では、この交差点内右折待ちノード410cが、特許請求の範囲の表示切り替えノードに相当する。なお、交差点内右折待ちノード410cの位置は、路側無線機10から取得した道路線形情報に含まれている。よって、路側無線機10からの情報を受信する車載無線機140が道路線形情報取得手段に相当する。なお、路側無線機10からの情報には、対向車両の情報も含まれているので、車載無線機140は対向車両情報取得手段にも相当する。
【0093】
上記判断は、具体的には、まず、道路線形情報に基づいて、前述の起点(光ビーコン通過位置)から交差点内右折待ちノード410cまでの距離を算出する。そして、交差点内右折待ちノード410cまでの距離をステップS12で演算した走行距離が越えた場合に、交差点内右折待ちノード410cを越えたと判断する。
【0094】
ステップS13でYESと判断した場合には、ステップS14に進み、図5のステップS9と同じ処理を行なうことにより、交差点地図をヘディングアップ表示に切り替える。一方、ステップS13でNOと判断した場合には、ステップS15へ進む。
【0095】
ステップS15では、交差点の信号灯色が右折矢印点灯状態か否かを判断する。この判断がYESである場合にもステップS14へ進む。一方、この判断がNOであればステップS12へ戻る。
【0096】
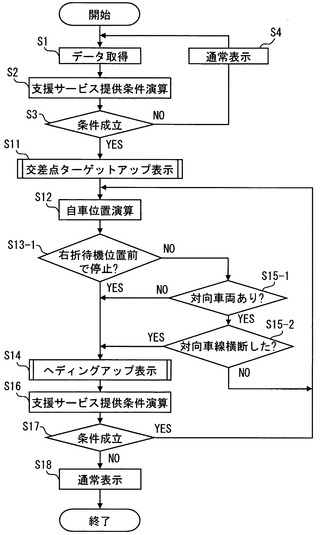
ステップS16では、支援サービス提供条件を演算するためのデータを取得し、取得したデータに基づいて、支援サービス提供条件の演算を行なう。ステップS17では、支援サービス提供条件が成立したか否かを判断する。この判断がYESであれば、ステップS12へ戻る。一方、この判断がNOであればステップS18へ進む。ステップS18では、表示器120の表示画面を通常表示とする。この通常表示の意味は、ステップS4と同じである。
【0097】
図14、15は、第2実施形態における交差点地図の変化を例示する図であり、図14は、図13がYESとなって表示形式が変化した例であり、図15はステップS15がYESとなって表示形式が変化した例である。図14、図15ともに、左図は、交差点に対する自車両Aの位置および向きの実際の状況であり、右図は、各左図に対応する交差点地図である。
【0098】
まず、図14を説明する。図14においては、各左図に、道路線形情報に含まれているノード410、リンク420も示している(ただし一部のノード410、リンク420は省略)。図14(A)は、左図に示すように、自車両Aは、停止線を越えて交差点に進入し始めた状態であり、まだ、交差点内右折待ちノード410cを通過していない。そのため、図13のステップS13がNOとなる。この状態で信号灯色が通行許可を示す青であるとすると、ステップS15もNOとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0099】
図14(B)は、左図に示すように、自車両Aが交差点内右折待ちノード410cを通過している。従って、図13のステップがYESとなる。そのため、交差点地図はヘディングアップ表示となる。図14(A)の表示から図14(B)の表示に切り替わる際には、図14(B)に矢印で示すように、地図が回転したように見えることになる。なお、表示形式を交差点ターゲットアップからヘディングアップ表示に切り換える際、自車両の向きにより定まる最終的な角度の地図に直接切り替えてもよいし、また、その角度まで徐々に回転するように地図を表示してもよい。徐々に回転させる場合、車速が速いほど回転速度を速くして、最終的な状態とするまでの時間を短くするようにしてもよい。
【0100】
図14(C)は、左図に示すように、自車両Aが横断歩道終点ノード410fを通過している。支援サービスエリアが横断歩道終点ノード410fまでと定められている場合には、ステップS17がNOとなる。よって、通常表示に戻る。通常表示は、交差点地図が表示される前の表示であり、この図14の例では、表示をオフにしている。
【0101】
次に、図15を説明する。図15(A)は、左図に示すように、自車両Aは、交差点の手前(より詳しくは図示していない停止線の直前)に位置している。そのため、図13のステップS13がNOとなる。また、図15の各左図には信号の状態も示しており、文字あるいは矢印を示している部分が点灯状態であることを意味する。図15(A)では、信号灯色が通行許可を示す青(図ではBで表示)であるので、ステップS15もNOとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0102】
図15(B)は、左図に示すように、自車両Aは、向きを交差点退出路方向へかなり向けた状態で右折待ちである。この図にはノード410は示していないが、図15(B)の状態では、自車両Aは交差点内右折待ちノード410cを通過していない。従って、図13のステップS13はまだNOのままである。また、信号灯色は青のままである。従って、交差点地図は交差点ターゲットアップ表示のままである。
【0103】
図15(C)は、左図に示すように、自車両Aの位置は図15(B)と同じである。ただし、信号灯色が青から、右矢印信号が点灯状態へと変化している。そのため、ステップS15がYESとなる。よって、自車両Aの位置は図15(B)から変化していないが、交差点地図の表示形式はヘディングアップ表示へと切り替わり、図15(C)の右図に示されるように、交差点地図は、交差点退出路および右折後障害物図形220が画面上方向に近い位置の表示となる。
【0104】
以上、説明した第2実施形態では、自車両Aの位置が、交差点内右折待ちノード410cを越えるまでは、交差点地図の上方向が自車両の交差点への進入方向となっている交差点ターゲットアップ表示で交差点地図が表示されるので、交差点地図に重畳表示される対向車両図形210を認識しやすい。また、交差点内右折待ちノード410cを越えて、交差道路の横断歩道が進行方向の前方に存在する状況では、交差道路が認識し易いヘディングアップ表示で交差点地図が表示されるので、交差点地図に重畳表示される右折後障害物図形220も認識しやすい。
【0105】
また、右矢印信号となった場合には、対向車線から交差点へ車両が進入してくる可能性は低いので、この第2実施形態では、自車両Aが交差点内右折待ちノード410cを通過する前であっても、右矢印信号となった場合には、交差点地図の表示形式をヘディングアップ表示としている。これにより、右矢印信号が点灯している際に最も注意が必要な、対向車線を横断した後の障害物の存在を示す右折後障害物図形220を認識しやすくなる。
【0106】
(第3実施形態)
次に、第3実施形態を説明する。第3実施形態も、機械的構成は第1実施形態と同じである。図16は、第3実施形態において演算装置170が行う処理を示すフローチャートである。
【0107】
図16のフローチャートは、図13のステップS14に代えてステップS14−1を実行する点が第2実施形態と相違するのみである。図13のステップS14では、交差点地図の表示形式をヘディングアップ表示としていたが、この第3実施形態のステップS14−1では、交差点地図の表示形式をノードターゲットアップ表示とする。
【0108】
このノードターゲットアップ表示とは、交差点内右折待ちノード410c(表示切り替えノード)以降の2つの予め定められたノード410を結ぶ方向であって進行方向前側のノード410を画面上方向とする表示形式である。
【0109】
図17を用いてノードターゲットアップ表示を具体的に説明する。図17(A)は、破線矢印430Aにて交差点地図の上方向を示している点において図14(A)と相違するが、自車両A、対向車両B、歩行者Cの位置は、図14(A)と同じである。この図17(A)の左図の状態では、第3実施形態でも交差点ターゲットアップ表示を行なう。よって、図17(A)の右図は図14(A)の右図と同じである。
【0110】
図17(B)の左図は、図17(A)から自車両Aが進行して、交差点内右折待ちノード410cを自車両Aが通過した状態を示している。また、図17(B)の左図にも、破線矢印430Bで、右図に示す交差点地図の上方向を示している。
【0111】
図17(B)の破線矢印430Bは、交差点内右折待ちノード410cと、横断歩道終点ノード410fとを結んだ方向となっている。この破線矢印430Bにおいて、進行方向前側のノード、すなわち、横断歩道終点ノード410fを画面上方向とした交差点地図が、図17(B)の右図である。
【0112】
図17(B)の左図において、破線矢印430Bの向きと自車両Aの向きと比較すると分かるように、両者の向きは類似する。よって、ノード410を結んだ方向により交差点地図の画面上方向を決定するようにすれば、車両向きを検出するセンサの信号を用いなくても、自車両Aの向きの変化に対応して交差点地図の画面上方向を変化させることができる。従って、車両向きを検出するセンサを備えていない車両であっても、自車両の向きの変化に対応して交差点地図の画面上方向を変化させることができる。
【0113】
(第3実施形態の変形例1)
上述の第3実施形態では、対向方路との交点ノード410dおよび横断歩道開始ノード410eの2つのノードを間に挟んだ2つのノード410c、410fを結んだ方向を交差点地図の画面上方向としていた。しかし、これに限らず、交差点内右折待ちノード410cを通過した後、自車両Aが位置するリンク方向(すなわち自車両Aの直前ノードと直後ノードを結んだ方向)を交差点地図の画面上方向としてもよい。
【0114】
(第3実施形態の変形例2)
また、交差点内右折待ちノード410cを通過した時点で、横断歩道開始ノード410eと横断歩道終点ノード410fを結んだ方向であって横断歩道終点ノード410fを画面上方向とする交差点地図を表示してもよい。交差点内右折待ちノード410cを通過した直後は、自車両は、まだ、交差点退出路方向を向いていない。しかし、このようにすれば、交差点内右折待ちノード410cを通過した時点で、交差点退出路の横断歩道が画面上方向となる交差点地図が表示されるので、その横断歩道に存在する障害物をより認識しやすくなる。特に、交差点内右折待ちノード410cを通過した時点の速度が速い(所定車速以上)場合に横断歩道に比較的短時間で到達するので、このようにすることが好ましい。
【0115】
(第4実施形態)
次に、第4実施形態を説明する。第4実施形態も、機械的構成は第1実施形態と同じである。図18は、第4実施形態において演算装置170が行う処理を示すフローチャートである。
【0116】
図18のフローチャートは、図16のステップS13に代えてステップS13−1を実行し、ステップS15に代えてステップS15−1、S15−2を実行する点が第3実施形態と相違するのみである。
【0117】
ステップS13−1では、自車両Aが交差点内において右折待機位置よりも前で一旦停止したか否かを判断する。この判断がYESの場合にもステップS14へ進み、表示形式をヘディングアップ表示に切り換える。
【0118】
一方、ステップS13−1がNOであればステップS15−1へ進む。ステップS15−1では、対向車両があるか否かを判断する。なお、ここでの判断は、自車両の向きは関係なく、対向車両があるかないかのみを判断する。この判断がNO、すなわち対向車両がない場合には、ステップS14へ進み、表示形式をヘディングアップ表示に切り換える。一方、この判断がYES、すなわち対向車両が存在する場合には、ステップS15−2へ進み、自車両Aが対向車線を横断したか否かを判断する。この判断は、自車両Aが対向方路との交点ノード410dを通過したか否かにより行なう。なお、対向方路との交点ノード410dに代えて、横断歩道開始ノード410eを用いてもよい。ステップS15−2がYESであればステップS14へ進み、表示形式をヘディングアップ表示に切り換える。一方、この判断がNOであれば、ステップS12へ戻る。
【0119】
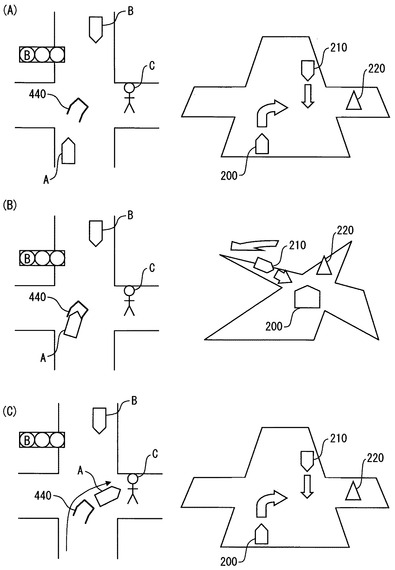
図19は、第4実施形態における交差点地図の変化を例示する図である。図19(A)は、左図に示すように、自車両Aは、交差点の手前(より詳しくは図示していない停止線の直前)に位置している。この図19(A)の位置は、交差点内ではないことから、自車両Aが停止中か走行中かに関係なく、ステップS13−1はNOとなり、ステップS15−1はYESとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0120】
図19(B)の左図は、自車両Aが交差点内において右折待機位置440よりも前で停止した状態を示している。この場合、ステップS13−1がYESになりステップS14へ進む。よって、交差点地図は、図19(B)の右図に示されるように、ヘディングアップ表示となる。
【0121】
図19(C)の左図は、自車両Aは、交差点内において右折待機位置440よりも前で停止せずに、その右折待機位置440を通過した状態を示している。この場合、ステップS13−1はNOとなることから、自車両Aが右折待機位置440を越えても、図19(C)の右図に示すように、交差点ターゲットアップ表示を維持する。
【0122】
自車両Aが交差点内で停止した場合には、自車両Aのドライバは、交差点に進入する対向車両Bに注意を払っていると推定することができる。そこで、この第4実施形態では、自車両Aが交差点内において右折待機位置440までに停止した場合には、表示形式を交差点ターゲットアップ表示からヘディングアップ表示へ切り替える。これにより、次に注意を払う必要がある、対向車線を横断した後の障害物の存在を認識し易くしている。一方で、右折待機位置までに自車両Aが交差点内で停止しなかった場合であって(S13−1:NO)、対向車両が存在する場合には(S15−1:YES)、自車両Aの位置が待機位置ノードを越えているとしても、対向車線を横断するまでは、表示形式を対向車両を認識しやすい交差点ターゲットアップ表示に維持する。これによって、対向車両の存在に気づきやすくしている。
【0123】
(第5実施形態)
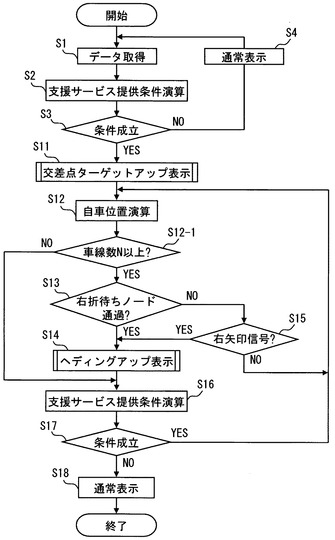
次に、第5実施形態を説明する。第5実施形態も、機械的構成は第1実施形態と同じである。図20は、第5実施形態において演算装置170が行う処理を示すフローチャートである。図20のフローチャートは、図13のフローチャートに対して、ステップS12とステップS13の間に、ステップS12−1が追加されている。
【0124】
ステップS12−1では、走行中の道路の車線数が、2以上の値に設定されたN以上であるか否かを判断する。上記Nは、交差点が大きいとみなすことができる数値(たとえば3)に設定されている。なお、車線数、Nは、それぞれ、特許請求の範囲の交差点サイズ値、基準サイズ値に相当する。
【0125】
ステップS12−1の判断は、路側無線機10から送信されてくる道路線形情報に含まれている車線数の情報を用いて行なう。この判断がYESであればステップS13へ進む。一方、この判断がNOであればステップS16へ進む。つまり、走行中の道路の車線数がN以上でなければ、ヘディングアップ表示への切り替えを行わず、交差点ターゲットアップ表示を維持するのである。
【0126】
交差点ターゲットアップ表示は、自車両Aが交差点内右折待ちノード410cを通過して進行方向が変化した場合に、交差点地図の上方向が進行方向前方を示さない状態となる。交差点が大きい場合、自車両Aが交差点内右折待ちノード410cを通過して進行方向が変化した後も、交差点ターゲットアップ表示を維持するとすれば、交差点地図の上方向が進行方向前方を示さない状態が比較的長く続くことになるため、ドライバが違和感を覚える恐れがある。そこで、この第5実施形態では、車線数がN以上の大きな交差点では、ステップS13、15を実行して、交差点ターゲットアップ表示からヘディングアップ表示へ変更するか否かを判断している。一方、小さな交差点では、表示形式を変更しても、変更後の形式で表示している期間は短時間であり、短時間のみの表示形式の変更によってドライバが煩わしさを感じてしまう恐れもある。そこで、車線数がNよりも小さい場合には、ステップS13〜S15を実行しないことで、表示形式を変更しないようにしている。
【0127】
(第6実施形態)
次に、第6実施形態を説明する。第6実施形態では、交差点までの距離に応じて、地図の表示態様を二次元的な表示態様(以下、二次元地図)および三次元的な表示態様(以下、三次元地図)の一方から他方へ切り換える。
【0128】
二次元地図は、画面上下方向および左右方向において縮尺が同一である地図を意味する。一方、三次元地図は、画面上側ほど縮尺が小さくなる地図であり、これまでに説明した交差点地図は、いずれもこれに該当する。
【0129】
図21は、第6実施形態における交差点地図の変化を例示する図である。図21の(A)〜(E)はいずれも交差点地図であり、(A)、(B)、(C)、(D)、(E)の順に表示が変化する。また、図21(A)〜(E)には、いずれも、自車両図形200、対向車両図形210、右折後障害物図形220が示されている。
【0130】
図21(A)は、交差点中心までの自車両Aの距離が、予め設定された三次元表示距離よりも遠い場合の表示態様であり、交差点地図を二次元地図で表示している。なお、この図(A)の地図も、交差点へ進入する直近の自車両の進行方向前方が画面上となる交差点ターゲットアップ表示である。
【0131】
自車両Aが進行して、交差点中心までの距離が上記三次元表示距離以下になると、図(B)に示すように、三次元地図に切り替わる。この図(B)は、図10(A)の右図と同じであり、自車両図形200、対向車両図形210の大きさにより、両者の相対距離を示している。自車両A、対向車両Bとも交差点に近づいていくにつれ、徐々に、自車両図形200、対向車両図形210が大きく表示される図(C)はその一例である。そして、これまでの実施形態におけるいずれかの判断により、表示形式をヘディングアップ表示に切り替えると判断した場合には、図(D)に示すように、ヘディングアップ表示で交差点地図を表示する。その後、さらに自車両Aが走行し、再び、交差点中心までの距離が上記三次元表示距離よりも大きくなると、図(E)に示すように、交差点地図を二次元地図に戻す。
【0132】
なお、三次元地図の表示を開始するための上記三次元表示距離は、支援サービスエリア内に含まれる距離である。ただし、二次元地図の表示開始位置は、支援サービスエリア内である必要はない。支援サービスエリア外では、路側無線機10から交差点地図を取得することはできないので、ナビゲーション装置などの他の装置から交差点の地図を取得して表示を行なう。
【0133】
この第6実施形態では、自車両が交差点に近い位置にいる場合には、実際の景観により近い表示態様である三次元地図で交差点地図が表示される。よって、交差点地図から、交差点周辺エリアに存在する障害物を認識しやすくなる。また、自車両が交差点から遠い場合には、二次元地図で交差点地図が表示されるので、自車両から遠い位置までの距離を把握しやすい。
【0134】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0135】
たとえば、交差点地図は、実際の交差点形状を反映した地図とする場合であっても、道路地図データを用いずに、車両の走行軌跡から自車両の進行方向に存在する交差点の形状を決定し、その決定した交差点の形状に基づいて交差点地図を作成し、この交差点地図を交差点ターゲットアップ表示してもよい。詳しくは図11を用いて説明する。
【0136】
演算装置160は、車車間通信により他車両Dの位置を逐次取得して他車両Dの走行軌跡300を決定する(図11(A))。また、自車両Aについても走行軌跡310を決定する。そして、それら走行軌跡300、310をそれまでと同じ曲率で延長した経路を、それぞれ、今後の他車両Dの推定経路320、今後の自車両Aの推定経路330に決定する。そして、それら2つの推定経路320、330の交点を自車両の進行方向に存在する交差点340とし、その交差点340およびその付近の推定経路320、330の形状を交差点地図とする。そして、自車両の推定経路330において、交差点340の付近が画面上下方向となるように交差点地図を回転させたものが図11(B)に示す図であり、この図11(B)の図が、交差点ターゲットアップ表示での交差点地図である。このようにして交差点地図の形状およびその交差点地図の上方向を決定すれば、道路地図データを利用していないことから、道路地図データを取得できなくても、交差点地図を表示することができる。この図11の態様においては、演算装置160は、特許請求の範囲の道路形状決定手段としても機能する。なお、推定進路320、330は、走行軌跡300、310をそれまでと同じ曲率で延長して作成する方法に限られず、走行軌跡300、310の現時点での接線方向を推定進路としてもよい。
【0137】
また、前述の支援サービス提供条件が成立していても、交差点を通過する前に、走行中の道路の信号灯が通行禁止を示す灯色(ここでは赤信号とする)となった場合には、ステップS4を実行して通常表示としてもよい。進行方向の信号が赤信号となった場合、通常、自車両は走行を停止することから、障害物の存在を通知する必要性は低下する。その一方で、赤信号での停車中は、交差点地図が表示される前の画面を確認したいことも多いと考えられるからである。この場合、青信号になったら、再度、ステップS5、S6、S8により定まる表示形式で交差点地図を表示する。
【0138】
また、前述の実施形態では、上方向固定表示として交差点ターゲットアップ表示を行っていたが、これに代えて、ノーズアップ表示を行ってもよい。
【0139】
また、前述の実施形態は右折時に障害物情報を通知するものであったが、左折時に障害物情報を通知してもよい。また、路側カメラ20に代えて、ミリ波レーダ等のレーダにより物体を検知するようにしてもよい。
【0140】
また、第5実施形態では、車線数を交差点サイズ値としていたが、交差点内右折待ちノード410cから横断歩道開始ノード410eまで、あるいは、横断歩道終点ノード410fまでの距離を交差点サイズ値としてもよい。
【0141】
また、第2実施形態では、自車両Aが交差点内右折待ちノードを通過していなくても、右矢印信号となった場合には、表示形式をヘディングアップ表示に切り替えていたが、右折待ちノードを通過したか否かの判断に代えて、対向車両が存在するか否かを判断してもよい。つまり、対向車両が存在していても、右矢印信号となった場合には、表示形式をヘディングアップ表示に切り替えるようにしてもよい。
【0142】
前述の実施形態において、ヘディングアップ表示に代えて、ノードターゲットアップ表示を用いてもよい。また、逆に、ノードターゲット表示に代えてヘディングアップ表示を用いてもよい。
【符号の説明】
【0143】
1:運転支援システム、 10:路側無線機、 20:路側カメラ、 30:光ビーコン、 40:信号灯制御器、 50:路側制御装置、 100:車載装置(車載障害物情報通知装置)、 110:車速センサ、 120:表示器、 130:スピーカ、 140:車載無線機(道路線形情報取得手段、対向車両情報取得手段)、 150:光ビーコンアンテナ、 160:車内LAN、 170:演算装置(地図表示制御手段、道路形状決定手段)、 200:自車両図形、 210:対向車両図形(障害物図形)、 220:右折後障害物図形、 300:(他車両D)の走行軌跡、 310:(自車両A)の走行軌跡、 320:(他車両D)の推定経路、 330:(自車両A)の推定経路、 340:交差点 A:自車両、 B:対向車両、 C:歩行者
【技術分野】
【0001】
本発明は、車載障害物情報通知装置に関し、特に、車両が交差点を曲がる際に交差点周囲の障害物の存在を画面表示により通知する車載障害物情報通知装置に関する。
【背景技術】
【0002】
車載障害物情報通知装置として、交差点を曲がる際に対向車情報をドライバへ通知する装置が知られている(たとえば特許文献1)。また、特許文献1には、従来技術として、交差点を右折後に通過する横断歩道に歩行者が存在するかどうかを知らせる技術も開示されている。
【0003】
また、交差点地図など、車両が走行中の道路の地図を車両の表示器に表示する装置は、車載ナビゲーション装置などとして広く知られている。さらに、車載ナビゲーション装置には、表示器の画面に表示している道路地図を、車両の現時点での進行方向前方が画面上となる表示形式であるヘディングアップ表示とするか、地図の北方向が画面上となるノーズアップ表示とするかをユーザが選択できるものも広く知られている。
【0004】
さらに、地図の表示形式としては、交差点への進入方向が表示画面の上方を向く方向となる表示形式も知られている(たとえば特許文献2)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−11249号公報
【特許文献2】特開平6−265366号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来技術では、常にユーザが設定した表示形式で地図を表示することが一般的である。また、特許文献2のように、交差点までの距離により地図の表示形式を変更するものもあるが、特許文献2においても、交差点までの距離が所定値未満となった後は、地図の表示形式は常に同じである。
【0007】
ここで、特許文献1のように、交差点地図に障害物情報を表示して障害物を通知する場合を考えると、障害物としては、例えば、右折時の対向車両や、交差点を曲がった後の横断歩道やその周辺に存在する歩行者等がある。これらの障害物の存在をドライバが認識しやすい表示形式が望まれる。
【0008】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、交差点における進行方向の障害物の存在を認識しやすい車載障害物情報通知装置を提供することにある。
【課題を解決するための手段】
【0009】
その目的を達成するための請求項1記載の発明によれば、表示手段は、交差点地図を、地図の画面上方向を交差点に進入する前に定まる所定方向に固定する第1表示形式、および、自車両が前記交差点を曲がる際に変化する自車両方向情報に基づいて地図の画面上方向が定まる第2表示形式で前記交差点地図を表示可能となっている。そして、判断手段は、交差点周辺エリア内に存在する移動体の情報に基づいて、表示形式を、第1表示形式とするか第2表示形式とするかを判断する。
【0010】
よって、交差点周辺エリア内に存在する移動体の情報の変化により、交差点地図は、第1表示形式となったり、第2表示形式となったりするので、実際の状況に応じた分り易い表示形式の交差点地図となる。その結果、障害物の存在を認識しやすくなる。
【0011】
第2表示形式としては、請求項2のように、自車両の向きを自車両方向情報とし、自車両の進行方向前方が画面上となるよう地図の画面上方向を変化させる表示形式であるヘディングアップ表示がある。
【0012】
また、交差点周辺エリア内に存在する移動体としては、自車両とは反対方向から交差点に進入する対向車両、交差点退出路に存在する障害物などがあり、また、自車両も上記移動体に含まれる。自車両以外の移動体の存在を取得するためには、たとえば、請求項3のように、交差点周辺エリア内に存在する移動体の情報を取得する移動体情報取得手段を備える。そして、判断手段は、移動体情報取得手段が取得した移動体の情報に基づいて表示形式を判断する。
【0013】
一方、移動体の情報として自車両の位置を用いる場合には、請求項4のように、交差点周辺エリア内における自車両の位置を演算する自車位置演算手段を備える。そして、判断手段は、自車位置演算手段により演算された自車両の位置を移動体の情報として用いて表示形式を判断する。
【0014】
請求項5記載の発明は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知する車載障害物情報通知装置である。また、移動体情報取得手段は、対向車線から交差点に進入する対向車両、および、対向車線を横断後の交差道路に存在する対向車線横断後障害物の情報を取得する。そして、判断手段は、進行方向に対向車両が存在することに基づいて第1表示形式とすると判断し、対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断する。
【0015】
対向車両は、交差点へ対向車線から走行してくる車である。よって、交差点に進入する自車両の運転者にとって、対向車両が存在する方向は地図表示を見るまでもなく把握できる。そこで、進行方向に対向車両が存在することに基づいて上方向固定表示にすることで、不要な地図回転が抑止されて対向車両の存在が把握しやすくなる。
【0016】
一方で、対向車線横断後障害物(たとえば対向車線横断後の横断歩道やその周辺に存在する歩行者)は、自車両が交差点周辺エリアを走行している間に、自車両からの方向が大きく変化する。具体的には、自車両が交差点周辺エリアに入った当初は斜め前方向に存在するが、交差点にて対向車線を横断して自車両の向きが交差点退出路を進行する向きとなると、自車両に対する対向車線横断後障害物の方向は、それまでとは大きく変化する。そこで、判断手段は、対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断することで、進行方向に対向車線横断後障害物が存在することが把握しやすくなる。
【0017】
請求項6記載の発明では、判断手段は、対向車線横断後障害物が存在し、且つ、進行方向に対向車両も存在するときは第1表示形式とすると判断する。このようにすると、対向車線横断後障害物および対向車両の両方が存在する場合には、交差点を曲がるまでは第1表示形式となる。よって、対向車両に注意しなければいけない間は第1表示形式となるので、対向車両を把握しやすい。また、交差点を曲がって自車両の向きが交差点退出路を進行する向きとなると第2表示形式となるので、進行方向に対向車線横断後障害物が存在することも把握しやすい。
【0018】
請求項7記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知する車載障害物情報通知装置である。また、移動体の情報は自車両の位置としており、判断手段は、自車両が交差点を曲がる位置となるまでは第1表示形式とし、自車両が交差点を曲がった後の位置となった後は第2表示形式とすると判断する。
【0019】
このように判断すると、対向車両に注意する必要がある間は第1表示形式となるので、対向車両を把握しやすい。また、交差点にて対向車線を横断して交差道路へ進入し、自車両の向きが交差点退出路を進行する向きとなると第2表示形式となるので、進行方向の対向車線横断後障害物の存在も把握しやすい。
【0020】
請求項8記載の発明では、判断手段が判断した形式で表示手段に交差点地図を表示する地図表示制御手段を備える。
【0021】
請求項9記載の発明では、第1表示形式として、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示を行う。交差点ターゲットアップ表示で交差点地図が表示されると、走行中の道路が交差点までの間に曲がっているとしても、また、自車両が北方向へ向かっていなくても、交差点への進入方向前方が画面上となる。よって、交差点を自車両とは反対方向から進入する対向車両が存在することが把握しやすい。
【0022】
請求項10記載の発明では、路側機から交差点形状を取得する交差点形状取得手段を備える。そして、地図表示制御手段は、交差点形状取得手段が取得した交差点形状に基づいて交差点地図を作成して前記表示手段に表示する。路側機からは、その路側機が設置された交差点の交差点形状が逐次送信される場合も多い。この請求項10のようにすれば、路側機から逐次送信される交差点形状を有効に活用することができる。
【0023】
ところで、進行方向の信号が赤信号となった場合、通常、自車両は走行を停止することから、障害物の存在を通知する必要性は低下する。その一方で、赤信号での停車中は、交差点地図が表示される前の画面を確認したいことも多いと考えられる。そこで、請求項11記載の発明では、地図表示制御手段は、判断手段が判断した表示形式で交差点地図を表示した後、自車両が交差点周辺エリアに存在しているが進行方向の信号が通行禁止を示す信号となったことに基づいて、表示手段の画面を、交差点周辺エリアに入る前の画面に戻す。
【0024】
また、この請求項11記載の発明では、その後、信号が通行許可を示す信号となったことに基づいて、再度、判断手段が判断した表示形式で交差点地図を表示するので、青信号になり再走行を開始した後は、交差点地図から障害物の存在を知ることができる。
【0025】
対向車両の情報は、路側に設置された路側無線機から取得するようにしてもよいが、請求項12のように、車車間通信により対向車両の情報を取得してもよい。このようにすれば、路側無線機が設置されていない交差点においても、交差点地図に障害物図形としての対向車両情報を表示することができる。
【0026】
請求項13記載の発明では、車車間通信で他車両情報を取得する。道路形状決定手段は、この他車両情報から他車両の走行軌跡を決定し、その走行軌跡から、他車両の今後の推定進路の形状を決定する。また、自車両の走行軌跡に基づいて自車両の今後の推定進路も決定する。さらに、それら他車両の今後の推定進路の形状と自車両の今後の推定進路の形状とに基づいて、自車両の進行方向に存在する交差点の形状を決定する。地図表示制御手段は、このようにして決定した交差点の形状に基づいて交差点地図の形状を決定する。また、自車両の今後の推定進路の形状に基づいて、ターゲットアップ表示の交差点地図における上方向を決定する。
【0027】
このようにして交差点地図の形状およびその交差点地図における上方向を決定する場合には、道路地図データを利用していないことから、道路地図データを、路側機等の車両外部の装置やナビゲーション装置等の車両内部の他の装置から道路地図データを取得できなくても、交差点地図を表示することができる。
【0028】
請求項14記載の発明では、交差点地図に障害物図形を表示する障害物と自車両との距離が短くなるほど交差点地図を大きい縮尺で表示する。また、それとともに、自車両図形および障害物図形も、交差点地図の縮尺に応じた大きさで表示する。このようにすれば、交差点地図の縮尺および自車両図形、障害物図形の大きさにより、自車両と障害物との距離を把握できる。
【0029】
請求項15記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。判断手段は、交差点周辺エリア内に存在する移動体の情報に基づいて表示形式を第1表示形式と判断した後、自車両の進行方向の信号が、対向車線を横断して交差道路へ進入可能を示す矢印信号となったことに基づいて、表示形式を第2表示形式とすると判断する。
【0030】
対向車線を横断して交差道路へ進入可能を示す矢印信号となった場合には、対向車線から交差点へ車両が進入してくる可能性は低い。そこで、本発明では、上記矢印信号となった場合には、表示形式を第2形式とすることで、対向車線を横断した後の障害物の存在を認識しやすくしているのである。
【0031】
請求項16記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。また、第1表示形式は、交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示とする。また、路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段を備える。判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードから対向車線を横断したことを示すノードまでの間の何れかのノードである表示切り替えノードを自車両が越えたと判断したことに基づいて、表示形式を第1表示形式から第2表示形式へ切り替えると判断する。
【0032】
このようにすれば、自車両の位置が表示切り替えノードを越えるまでは、交差点地図の上方向が自車両の交差点への進入方向となっている交差点ターゲットアップ表示で交差点地図が表示されるので、対向車両を認識しやすい。また、表示切り替えノードを越えて、交差道路の横断歩道が進行方向の前方に存在する状況では、対向車線を横断した後の交差道路が認識し易い第2表示形式で交差点地図が表示されるので、対向車線を横断した後の障害物の存在も認識しやすい。
【0033】
請求項17記載の発明では、第2表示形式を、道路線形情報取得手段が取得したノードのうち、表示切り替えノード以降の2つのノードを結ぶ方向を前記自車両方向情報とし、それら2つのノードのうち進行方向前側のノードを画面上方向とする表示形式であるノードターゲットアップ表示とする。
【0034】
自車両は、ノードに近い位置を通過しつつ交差点を通過する。よって、ノードを結んだ方向により画面上方向を決定するようにすれば、自車両が、車両向きを検出するセンサを備えていなくても、自車両の向きの変化に対応して交差点地図の画面上方向を変化させることができる。
【0035】
請求項18記載の発明では、表示切り替えノードを自車両が越えたと判断した場合のノードターゲット表示は、横断歩道開始ノードと横断歩道終点ノードと結ぶ方向であって横断歩道終点ノードを画面上方向とする。
【0036】
表示切り替えノードを越えた時点では、自車両は、まだ、交差点退出路方向を向いていないが、本発明では、この時点で、交差点退出路の横断歩道が画面上方向となる交差点地図が表示されるので、その横断歩道に存在する障害物をより認識しやすくなる。
【0037】
請求項19記載の発明も、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものである。また、第1表示形式は、交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示とする。また、路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段と、対向車線から交差点に進入する対向車両の情報を取得する対向車両情報取得手段とを備える。判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードまでに、自車両が交差点内で停止した場合には、表示形式を第1表示形式から第2表示形式へ切り替えると判断する一方、その待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、対向車両が存在する場合には、自車両の位置が待機位置ノードを越えても表示形式を第1表示形式に維持する。
【0038】
自車両が交差点内で停止した場合には、自車両のドライバは、交差点に進入する対向車両に注意を払っていると推定することができる。そこで、自車両が交差点内において待機位置ノードまでに停止した場合には、表示形式を第1表示形式から第2表示形式へ切り替えることで、次に注意を払う必要がある、対向車線を横断した後の障害物の存在を認識し易くする。一方で、待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、対向車両が存在する場合には、自車両の位置が待機位置ノードを越えても表示形式を第1表示形式に維持することで、対向車両の存在に気づきやすくしている。
【0039】
請求項20記載の発明では、判断手段は、自車両が交差点から予め設定された三次元表示距離内に位置している場合には、画面上側ほど縮尺が小さくなる三次元的な表示態様で交差点地図を表示すると判断し、自車両が三次元表示距離外に位置している場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で交差点地図を表示すると判断する。
【0040】
この発明では、自車両が交差点に近い位置にいる場合には、実際の景観により近い表示態様である三次元的な表示態様で交差点地図が表示される。よって、交差点地図から、交差点周辺エリアに存在する障害物が認識しやすくなる。また、自車両が交差点から遠い場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で交差点地図が表示されるので、自車両から遠い位置までの距離を把握しやすい。
【0041】
請求項21記載の発明では、判断手段は、交差点の大きさを示す交差点サイズ値が、基準サイズ値以上であれば、移動体の情報に基づいて表示手段における表示形式を第1表示形式とするか第2表示形式とするかの判断を行うが、交差点サイズ値が基準サイズ値よりも小さい場合にはその判断を行わず、交差点地図の表示形式を第1表示形式と判断する。
【0042】
交差点ターゲットアップ表示(第1表示形式)は、自車両が待機位置ノードを通過して進行方向が変化した場合に、交差点地図の上方向が進行方向前方を示さない状態となる。交差点が大きい場合、自車両が待機位置ノードを通過して進行方向が変化した後も、交差点ターゲットアップ表示を維持するとすれば、交差点地図の上方向が進行方向前方を示さない状態が比較的長く続くことになるため、ドライバが違和感を覚える恐れがある。そこで、交差点サイズ値が基準サイズ値以上となる大きな交差点では、第1表示形式から第2表示形式への変更を判断するのである。一方、小さな交差点では、表示形式を変更しても、変更後の形式で表示している期間は短時間であり、短時間のみの表示形式の変更によってドライバが煩わしさを感じてしまう恐れもある。そこで、交差点サイズ値が基準サイズ値よりも小さい場合には、表示形式を変更しないようにしている。
【図面の簡単な説明】
【0043】
【図1】運転支援システム1の全体構成を示す図である。
【図2】図1の路側無線機10、路側カメラ20、光ビーコン30の設置位置を例示する図である。
【図3】車載装置100の構成を示す図である。
【図4】交差点地図を例示する図である。
【図5】演算装置170が行う処理を示すフローチャートである。
【図6】図5のステップS9のヘディングアップ表示の処理を詳しく示すフローチャートである。
【図7】交差点に対する自車両Aの位置および向き(左図)と、各左図に対応する回転処理後の交差点地図(右図)を示す図である。
【図8】図5のステップS7、10のヘディングアップ表示の処理を詳しく示すフローチャートである。
【図9】交差点ターゲットアップ表示を、実際の道路形状、および、他の表示形式と比較して示す図である。
【図10】交差点ターゲットアップ表示において、交差点地図の縮尺の変化を例示する図である。
【図11】車車間通信により交差点ターゲットアップ表示の交差点地図を作成して表示する例を説明する図である。
【図12】道路線形情報を説明する図である。
【図13】第2実施形態において、演算装置170が行う処理を示すフローチャートである。
【図14】第2実施形態における交差点地図の変化を例示する図である。
【図15】第2実施形態における交差点地図の変化を例示する図である。
【図16】第3実施形態において演算装置170が行う処理を示すフローチャートである。
【図17】ノードターゲットアップ表示を説明する図である。
【図18】第4実施形態において演算装置170が行う処理を示すフローチャートである。
【図19】第4実施形態における交差点地図の変化を例示する図である。
【図20】第5実施形態において演算装置170が行う処理を示すフローチャートである。
【図21】第6実施形態における交差点地図の変化を例示する図である。
【発明を実施するための形態】
【0044】
以下、本発明の実施形態を図面に基づいて説明する。以下に示す実施形態は、左側通行が法制化されている地域に対応した実施形態であり、右側通行が法制化されている地域では、以下の実施形態と左右が逆になる。
【0045】
(第1実施形態)
図1は、運転支援システム1の全体構成を示す図である。この図1に示すように、運転支援システム1は、路側無線機10、路側カメラ20、光ビーコン30、信号灯制御器40、路側制御装置50を備えている。これらは、インフラ側の装置である。運転支援システム1は、これらインフラ側の装置と、車両に搭載される車載装置100とを備えている。
【0046】
路側無線機10は、交差点の所定位置、たとえば、図2に示すように、交差点周囲の横断歩道の上付近に設けられており、360°全範囲に渡り、700MHz帯もしくは5.9GHz帯など所定の周波数帯の電波を用いて、この交差点の周囲に種々の交差点情報を送信する。この交差点情報には、路側無線機10が設けられている交差点の信号機の信号サイクルを示す情報、交差点に進入する道路を走行している障害物(車両など)の有無や位置を示す情報、交差点周囲の横断歩道およびその横断歩道の周辺に障害物が存在するか否かを示す情報が含まれる。
【0047】
路側カメラ20は、路上に設置され、交差点に進入する車を撮影できるように、交差点へ向かう側の車線に対して交差点を挟んだ位置の道路上方に設けられる。また、それとは別に、交差点周囲の横断歩道を撮像できるように、交差点周囲の歩道上方にも設けられる
(図2参照)。なお、図2には、図示の都合上、道路上方に設置された路側カメラ20および歩道上方に設置された路側カメラ20をそれぞれ1台ずつ示してあるが、実際には、道路上方に設置された路側カメラ20は、交差点に進入する各道路を撮像可能な台数が設けられており、また、横断歩道を撮像する路側カメラ20も、各横断歩道が撮像可能な台数が設けられている。これら路側カメラ20と路側制御装置50とは有線により接続されており、路側カメラ20は、撮影した画像を路側制御装置50へ逐次出力する。
【0048】
光ビーコン30は、交差点通過後などの種々の位置において、道路上方に車線毎に配置されている。これら光ビーコン30は、道路を通過する車両に向けて連続的に道路交通情報、次の交差点までの距離、次の交差点の道路形状、交差点において交差する複数の道路においてこの光ビーコン30が設置されている道路を特定する走行道路特定情報(四叉路であれば4本の道路のうちのどれかを特定する情報)、交差点の信号灯色の情報等の所定の情報を送信する。走行道路特定情報は、路側無線機10がその路側無線機10の周囲全体に送信する道路線形情報が示す交差点道路形状において、自車両が存在する道路の特定に用いる。
【0049】
また、光ビーコン30は、車両に搭載された光ビーコンアンテナ150との双方向通信により車両が光ビーコン30の下を通過したことを検知する。光ビーコン30と路側制御装置50との間も有線により接続されており、光ビーコン30は、車両が通過したことを検知すると、そのことを示す信号を路側制御装置50へ送信する。なお、路側カメラ20や光ビーコン30と路側制御装置50との間の通信は無線により行われてもよい。
【0050】
信号灯制御器40は、交差点に設置された信号灯の灯火色を所定の順番で周期的に切り替える。また、信号灯制御器40は、信号灯の灯火色を示す情報を路側制御装置50へ逐次送信する。
【0051】
路側制御装置50は、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することで、この路側制御装置50は、障害物検出処理、情報送信処理を実行する。障害物検出処理においては、路側カメラ20によって撮像された画像を解析することで、交差点に進入する道路を走行している障害物を検出し、また、横断歩道やその周辺に存在する障害物を検出する。
【0052】
情報送信処理においては、障害物検出処理により検出した障害物の位置、現時点から所定サイクル分(たとえば2サイクル分)の信号灯の灯火色、および、予め記憶されている交差点の道路形状を、路側無線機10から逐次送信する。
【0053】
次に、車載装置100の構成について図3を用いて説明する。この車載装置100は、特許請求の範囲の車載障害物情報通知装置に相当する。車載装置100は、車速センサ110、表示器120、スピーカ130、車載無線機140、光ビーコンアンテナ150、および、これらと車内LAN160により接続された演算装置170を備えている。
【0054】
車速センサ110は、車速に比例する車速パルスを検出し、その車速パルスあるいは車速パルスから定まる車速信号を演算装置170へ出力する。表示器120は、特許請求の範囲の表示手段に相当し、車室内の所定位置に運転席から視認可能に設置され、表示器120の画面の所定領域に、交差点地図が表示される。この交差点地図は、たとえば、図4に示すものである。図4に示す交差点地図は、交差点およびその周辺を、交差点に進入する前の自車両が走行している側の斜め上方から見た三次元的地図であり、実際の交差点形状とは関係なく、その形状が予め記憶されたものである。ただし、この図4とは異なり、実際の交差点の形状(道路の交差角度等)を反映した交差点地図としてもよいし、また、交差点地図は二次元地図であってもよい。実際の交差点の形状を反映した交差点地図とする場合には、車内の他の装置(ナビゲーション装置など)から道路地図データを取得して交差点地図を作成してもよいし、また、路側無線機10から送信される交差点形状(交差点を構成する道路の形状を示す道路線形情報)を車載無線機140により取得し、その取得した交差点形状に基づいて交差点地図を作成してもよい。上記道路線形情報は、具体的には、交差点の形状をノード、リンクにより示すものであり、一部のノードにはノード属性が付与されている。なお、この場合、車載無線機140は交差点形状取得手段に相当する。
【0055】
交差点地図には、自車両を示す自車両図形200が重畳表示される。また、対向車両が存在すると判断された場合には、交差点を挟んで反対側に対向車両図形210が重畳表示され、横断歩道やその周辺に障害物が存在すると判断された場合には、横断歩道上に右折後障害物図形220が重畳表示される。これら対向車両図形210、右折後障害物図形220は、特許請求の範囲の障害物図形に相当する。スピーカ130からは、交差点地図上に図形210、220が表示される際に所定の音が出力される。
【0056】
車載無線機140は、路車間通信機としての機能と車車間通信機としての機能とを備えている。路車間通信機としては、路側無線機10から送信される電波を受信し、受信した電波を復調して演算装置170へ出力する。また、車車間通信機としては、他車両に搭載された車載無線機140との間で信号の送受信を行う。光ビーコンアンテナ150は、路上に設けられている前述の光ビーコン30との間で信号の送受信を行う。
【0057】
演算装置170は、CPU、ROM、RAM等を備えたコンピュータであり、CPUが、RAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することで、この演算装置170は、表示器120の表示画面に交差点地図を表示する地図表示処理を行う。
【0058】
図5は、演算装置170が行う地図表示処理を詳しく示すフローチャートである。演算装置170は、電源ONとなっている間、この図5に示す処理を所定周期で実行する。ステップS1では、次のステップS2において支援サービス提供条件を演算するための予め定められたデータを取得する。
【0059】
続くステップS2では、ステップS1で取得したデータに基づいて、支援サービス提供条件を演算する。本実施形態での支援サービスとは、交差点を右折する際に、障害物の存在をドライバに通知するサービスであり、提供条件は、支援サービスエリア(特許請求の範囲の交差点周辺エリアに相当する)に入っていること、および、右ウィンカがONとなっていることである。
【0060】
支援サービスエリアは、交差点の手前の所定位置から交差点を右折した後の所定位置までであり、エリアの開始位置は、交差点からの距離や座標により定めてもよいが、光ビーコン30を通過した位置や、路側無線機10からの信号を車載無線機140が受信できるようになった位置を開始位置とすることもできる。交差点からの距離により開始位置が定まる場合には、地図情報に開始位置を予め記憶しておき、ナビゲーション装置から現在位置情報を取得して開始位置を判断する。エリアの終了位置は、交差点からの距離や座標により定めてもよいが、ここでは、エリア開始位置からの距離により定めるものとし、ステップS2では、エリア開始位置からの走行距離を演算する。
【0061】
続くステップS3では、上述の支援サービス提供条件が成立したか否かを判断する。この判断が否定判断である場合にはステップS4へ進む。ステップS4では、表示器120の表示画面を通常表示とする。この通常表示は、交差点地図が表示されている状態であれば、その交差点地図が表示される前の表示であり、交差点地図が表示されていない状態であれば、そのままの表示である。交差点地図が表示される前の表示としては、表示器120がナビゲーション装置の表示器としても利用されている場合には、たとえば、ナビゲーション装置の地図データに基づいて表示される二次元的な地図表示がある。
【0062】
ステップS3で支援サービス提供条件成立と判断(肯定判断)した場合にはステップS5へ進む。ステップS5では、自車両の経路前方の障害物の有無を判定する。ここで、経路は交差点を右折する経路であり、前方には、現時点での自車両の前方のみならず、交差点において進行方向を変更した後の将来的な前方も含み、また、直前方のみならず斜め前方向も含む。そのため、右折後に通過する横断歩道やその周辺に障害物が存在する場合も障害物有りと判定する。一方、自車両が交差点退出路の方向を向いた後では、交差点流入路を走行する車両(右折前の対向車両)の位置は自車両の前方ではないことから、自車両が交差点退出路の方向を向いた後では、交差点流入路を走行する車両が存在していても、ここでの障害物には該当しない。なお、障害物は、自車両が道路を走行する際に衝突する可能性がある物体である。この障害物には、移動中の物体のみではなく、一時的に静止している静止物も含むが、固定物は含まない。ステップS5の判定は、路側制御装置50の検出結果を路側無線機10から取得するとともに、車内LAN160を介して、自車両の位置や向きの情報を取得する。また、対向車両については、車車間通信により、その存在を直接検出してもよい。なお、路側制御装置50の検出結果や、車車間通信による対向車両の存在は、交差点周辺エリア内に存在する移動体の情報を示すものであることから、これらを取得する車載無線機140は、特許請求の範囲の移動体情報取得手段に相当する。
【0063】
続くステップS6では、ステップS5の判定結果が障害物有りか否かを判断する。障害物なしと判断(否定判断)した場合、ステップS7へ進む。ステップS7では、地図の画面上方向を交差点に進入する前に定まる方向に固定する第1表示形式の一形式であり、交差点へ進入する直近の自車両の進行方向前方が画面上となる表示形式である交差点ターゲットアップ表示を行う。この交差点ターゲットアップ表示の詳細処理は図8を用いて後述する。
【0064】
ステップS6で障害物有りと判断(肯定判断)した場合にはステップS8へ進む。ステップS8では、障害物が、歩行者等のみであるか否かを判断する。歩行者等とは、右折後に自車両が通過する横断歩道やその周辺に存在する障害物を意味し、歩行者のみではなく、たとえば自転車も含む。また、この歩行者等は、特許請求の範囲の対向車線横断後障害物に相当する。
【0065】
ステップS8で歩行者等のみと判断(肯定判断)した場合にはステップS9へ進む。ステップS9では、自車両の現時点での進行方向前方が画面上となるように画面上方向を変化させる表示形式であるヘディングアップ表示を行う。このヘディングアップ表示の詳細処理は図6を用いて後述する。一方、ステップS8で歩行者等のみではないと判断(肯定判断)した場合、対向車両も存在すると判断したことになる。この場合、ステップS10へ進み、交差点ターゲットアップ表示を行う。このステップS10の処理はステップS7と同じである。
【0066】
本実施形態では、ステップS6〜S10の説明から明らかなように、障害物として経路前方に存在する対向車両を含む場合には交差点ターゲットアップ表示となり、障害物が歩行者等のみの場合にはヘディングアップ表示となる。また、ある支援サービスエリアに入った当初は、対向車両も歩行者もなしの場合(S6:NO)には交差点ターゲットアップ表示となり(S7)、方向者のみの場合(S8:YES)にはヘディングアップ表示となる(S9)。また、対向車両も歩行者もありの場合(S8:NO)にも、当初、交差点ターゲットアップ表示となる(S10)。ただし、ステップS5で説明したように、自車両が交差点退出路の方向を向いた後では、対向車両は経路前方の障害物に含まれない。よって、当初、交差点ターゲットアップ表示だったとしても、自車両が交差点退出路の方向を向いた後では、歩行者のみと判断し(S8:YES)、ヘディングアップ表示に切り替えることになる。なお、ステップS5、S6、S8は、特許請求の範囲の判断手段に相当し、ステップS7、S9、S10は地図表示制御手段に相当する。
【0067】
ここで、上記ステップS8の歩行者のみか否かの判断についてさらに説明する。歩行者ありか否かの判断は、路側無線機10が送信し車載無線機140が受信する障害物検出結果に基づいて判断する。しかし、路側無線機10は、障害物検出結果を送信先の特定をせずに送信(ブロードキャスト送信)していることから、障害物検出結果には、歩行者の存在のみではなく、車両の存在も含まれる。そこで、自車両が交差点退出路の方向を向いた後では、路側無線機10から送信される障害物検出結果のうち、車両の存在を示す情報は無視して、ステップS8の判断を行う。
【0068】
また、自車両が交差点退出路の方向を向いたことの判断は、自車両の方位を検出するセンサからの信号を用いて行なってもよいが、交差点を曲がる際の自車両の向きは、自車両の位置によりほぼ定まる。具体的には、自車両が交差点の待機位置を越えて対向車線に差し掛かった状態では、自車両の向きは交差点退出路の方向になっているか、少なくとも、交差点退出路の方向に近い向きとなっている。そして、自車両が対向車線を横断した状態では、自車両が交差点退出路の方向を向いたと考えてよい。そこで、自車両の位置が交差点待機位置を越えたこと、より確実には、自車両の位置が対向車線を横断した位置となったことにより、対向車両なし、すなわち、歩行者のみと判断して(S8:YES)、ヘディングアップ表示に切り替えてもよい。
【0069】
なお、自車両の位置が交差点待機位置を越えた、あるいは、対向車線を横断したことの判断は、たとえば、路側無線機10から送信される道路線形情報を用いて行なう。この道路線形情報には、前述のように、ノード、ノード属性が含まれている。ノード属性としては、たとえば、図12に示すように、ノード410cにはノード属性「交差点内右折待ち」(特許請求の範囲の待機位置に相当)が付与され、ノード410dにはノード属性「対向方路との交点」が付与され、ノード410eにはノード属性「横断歩道開始」が示され、ノード410fにはノード属性「横断歩道終点」が付与されている。そこで、ノード属性「交差点内右折待ち」が付与されているノード410cを自車両が越えたことにより、自車両の位置が交差点待機位置を越えたと判断する。また、ノード属性「対向方路との交点」が付与されているノード410dを自車両が通過したことにより、対向車線を横断したと判断する。また、自車両が上記ノード410を越えたことの判断は次のようにして行う。まず、起点である光ビーコン通過位置から、ノード間距離、すなわち、リンクの長さを足し算することにより、上記ノード410までの距離を算出する。一方、光ビーコン通過時からの自車両の走行距離をタイヤ回転数に基づいて算出する。これら2つの距離を比較することで、自車両が上記ノード410を越えたか否かの判断を行う。
【0070】
次に、図6を用いてヘディングアップ表示の詳細処理を説明する。まず、ステップS61では、自車両の現時点での進行方位を決定し、その方位を画面上とする。自車両の現時点での進行方位は、たとえば、地磁気センサからの信号により判断したり、ジャイロセンサ、ステアリング操舵角の信号を単独で、あるいは、適宜組み合わせて進行方位を判断する。また、道路線形情報として取得できる複数のリンクのうち、自車両がどのリンクに位置するかを、自車両がノード410を越えたか否かの判断と同様にして行なって、自車両が位置しているリンクの向きを自車両の進行方位としてもよい。また、ナビゲーション装置において、自律航法や電波航法により進行方位が逐次決定されており、ナビゲーション装置からその進行方位が取得できる場合には、ナビゲーション装置から進行方位を取得する。
【0071】
続くステップS62では、自車、支援対象交差点、障害物が、表示器120に設定された交差点地図表示領域に収まる範囲で、できるだけ大きい縮尺を算出する。より詳しくは、障害物(ヘディングアップの場合には歩行者等)と自車両との間の距離を算出し、その距離、および、距離から縮尺を算出する予め記憶された関係式から、地図の縮尺を算出する。
【0072】
ステップS63では、ステップS61で求めた画面上方向、および、ステップS62で算出した縮尺で交差点地図を表示する。より詳しくは、ステップS63では、基本となる交差点地図(予め記憶してある地図や、道路地図データから定まるもの)を、ステップS61で求めた方向が画面上方向となるように回転処理を行う。図7(A)(B)の各左図は、交差点に対する自車両Aの位置および向きの実際の状況であり、右図は、各左図に対応する回転処理後の交差点地図である。なお、左図において、符号Cは歩行者である。
【0073】
同図(A)は、左図に示すように、自車両Aが交差点に進入する前の状態であり、この状態では、右図に示すように、交差点地図は、走行中の道路が上下方向に延びており、右折後の交差点退出路は左右方向に延びている。
【0074】
同図(B)は、左図に示すように、自車両Aが停止線を越えて交差点に進入し、進行方向が少し右方向に変化した状態である。この状態では、右図に示すように、交差点地図は、それまで走行していた道路(交差点流入路)が左斜め上方向から右斜め下方向に延び、これから走行する道路(交差点退出路)が右斜め上方向から左斜めした方向に延びている。
【0075】
同図(C)は、左図に示すように、自車両Aが交差点においてほぼ方向を変え終え、交差点退出路にほぼ沿った方向となった状態である。この状態では、右図に示すように、交差点地図は、交差点退出路が上下方向に延び、交差点流入路が左右方向に延びている。
【0076】
この図7に例示したような回転処理を行った後、ステップS63では、さらに、その回転後の交差点地図を、ステップS62で算出した縮尺に基づいてサイズ変更を行って、そのサイズ変更後の交差点地図を表示器120に表示する。また、自車両図形200、右折後障害物図形220も交差点地図の縮尺に応じた大きさで表示する。
【0077】
右折後の交差点退出路に存在する歩行者等は、図7の左図からも分かるように、自車両の進行に従って、自車両に対する方位が大きく変化する。ヘディングアップ表示は、自車両の現時点での進行方位を画面上とすることから、自車両に対する方位が大きく変化する歩行者等であっても、ヘディングアップ表示とすれば、ドライバは、歩行者等の進行方向に存在することを混乱なく把握することができる。
【0078】
次に、図8を用いて交差点ターゲットアップ表示の詳細処理を説明する。まず、ステップS81では、支援対象交差点への進入方向を画面上方向と決定する。この支援対象交差点への進入方向は、具体的には、交差点へ進入する直近のリンク方向であって交差点内のノード端が上方向となる方向である。この進入方向は、図12に、矢印400で示す方向である。
【0079】
続くステップS82では、自車、支援対象交差点、障害物が、表示器120に設定された交差点地図表示領域に収まる範囲で、できるだけ大きい縮尺を算出する。より詳しくは、障害物(交差点ターゲットアップの場合には、少なくとも対向車両が存在する)と自車両との間の距離を算出し、その距離、および、距離から縮尺を算出する予め記憶された関係式から、地図の縮尺を算出する。ステップS83では、ステップS81で求めた画面上方向、および、ステップS82で算出した縮尺で、交差点地図を表示する。また、自車両図形200、対向車両図形210、右折後障害物図形220も交差点地図の縮尺に応じた大きさで表示する。
【0080】
交差点ターゲットアップ表示は、交差点に進入する直近の自車両の進入方向前方が画面上となる表示形式であることから、現時点での自車両の向きによらず、図4に例示するように、交差点進入前の道路が画面上下方向となる。ここで、この交差点ターゲットアップ表示の利点を説明する。
【0081】
図9は、交差点ターゲットアップ表示を、実際の道路形状および他の表示形式と比較して示す図である。同図(A)は、交差点地図を表示する交差点やその周辺の実際の道路形状の概略図であり、同図(B)、(C)、(D)は、それぞれ、ノーズアップ表示、ヘディングアップ表示、交差点ターゲットアップ表示である。
【0082】
図(A)に示すように、自車両(同図における白三角印を丸で囲んだ図形)が走行中の実際の道路は、自車両の位置から交差点までの間に曲がっており、自車両が走行中の道路は、現時点では略東方向に延びているが、交差点付近においては、略北東方向に延びている。また、この走行中の道路と交差する道路は、走行中の道路と略直角に交差している。
【0083】
ノーズアップ表示では北方向が画面上となるので、図(B)に示すように、交差点周辺では、自車両の交差点流入路と流出路は、いずれも斜め方向に延びる道路として示される。また、ヘディングアップ表示では現時点での進行方向が画面上となるので、実際の状態が図9(A)の状態の場合には、同図(C)に示すように、自車位置に対して交差点が左上方向に示される。これらノーズアップ表示やヘディングアップ表示は、走行中の道路が延びている向きや、走行中の車両の向きにより、支援対象の交差点の表示位置や表示角度が変化してしまう。これに対して、交差点ターゲットアップ表示は、常に、図(D)に示すように、交差点への進入方向が画面上方向となる表示形式である。従って、図(A)のように、自車両の現在位置から交差点までの実際の道路形状が曲がっており、且つ、自車両が走行している道路が交差点において南北方向に延びていない場合であっても、交差点への進入方向が画面上方向となる。そのため、交差点を自車両とは反対方向から進入する対向車両が存在することが把握しやすくなる。
【0084】
図10は、交差点ターゲットアップ表示において、交差点地図の縮尺の変化を例示する図である。同図(A)、(B)ともに、左図は、自車両Aと対向車両Bとの実際の位置関係を示す図であり、右図が、左図に対応した交差点地図の表示例である。また、図(A)は、自車両Aと対向車両Bとの間の距離が比較的長い場合の表示例であり、図(B)は、自車両Aと対向車両Bとの間の距離が比較的短い場合の表示例である。
【0085】
この図10に示すように、自車両Aと対向車両Bとの間の距離が短いほど、自車両図形200や対向車両図形210は大きく表示されるので、自車両Aと対向車両Bとの間の距離を、交差点地図から把握することができる。
【0086】
以上、説明した本実施形態によれば、自車両の進行方向に対向車両が存在する場合には、交差点地図を、交差点への自車両の進入方向前方が画面上方向となる交差点ターゲットアップ表示としていることから、対向車両の存在が把握しやすい。また、交差点地図の表示形式は逐次決定しており、当初(右折前)は、自車両の進行方向に対向車両が存在するとしても、自車両が交差点で右折し、対向車線を横断し終わると、対向車両は自車両の進行方向には存在しなくなる。そして、対向車線を横断し終わり、対向車両が自車両の進行方向に存在しない状態となり、且つ、歩行者等が存在すると判断した場合には、交差点地図をヘディングアップ表示としている。よって、歩行者等の存在も把握しやすい。
【0087】
前述の実施形態では、自車両の経路前方に障害物(対向車両・歩行者等)が存在するか否かにより、交差点ターゲットアップ表示とするかヘディングアップ表示とするかを切り替えていた。しかし、障害物の存否に代えて、交差点に対する自車両の位置により、表示形式を切り替えるようにしてもよい。具体的には、自車両が交差点を曲がり、その進行方向が交差点退出路を向く位置を交差点内に設定し、その位置を表示切り替え位置とする。そして、その表示切り替え位置よりも交差点進入方向手前では交差点ターゲットアップ表示を設定し、その表示切り替え位置よりも交差点退出方向ではヘディングアップ表示とする。上記表示切り替え位置は、仮に対向車両が存在するとしても、その対向車両が経路前方ではなくなる位置である。よって、対向車両に注意する必要がある間は交差点ターゲットアップ表示となるので、対向車両を把握しやすい。また、交差点を右折して自車両の向きが交差点退出路を進行する向きとなるとヘディングアップ表示となるので、経路前方の歩行者等の存在も把握しやすい。なお、この態様においては、自車両の位置は演算装置170が逐次演算する。すなわち、この態様においては、演算装置170は自車位置演算手段として機能する。
【0088】
以下の実施形態は、交差点に対する自車両の位置により表示形式を切り替える実施形態である。なお、以下の説明において、それまでに使用した符号と同一番号の符号を有する要素は、特に言及する場合を除き、それ以前の実施形態における同一符号の要素と同一の要素である。
【0089】
(第2実施形態)
次に、第2実施形態を説明する。第2実施形態も、機械的構成は第1実施形態と同じである。図13は、第2実施形態において、演算装置170が行う処理を示すフローチャートである。
【0090】
図13において、ステップS1〜S4は、図5と同じ処理である。ステップS3において、支援サービス提供条件が成立したと判断した場合には、ステップS11に進み、図5のステップS7と同じ処理を行なうことにより、交差点ターゲットアップ表示で交差点地図を表示する。
【0091】
ステップS12では、交差点に対する自車両の位置の演算を行なう。自車両の位置の演算は、ここでは、光ビーコン30の通過を起点として、そこからの走行距離をタイヤ回転数に基づいて演算する処理とする。
【0092】
ステップS13では、上記ステップS12で演算した自車位置が交差点内右折待ちノード410cを越えたか否かを判断する。この第2実施形態では、この交差点内右折待ちノード410cが、特許請求の範囲の表示切り替えノードに相当する。なお、交差点内右折待ちノード410cの位置は、路側無線機10から取得した道路線形情報に含まれている。よって、路側無線機10からの情報を受信する車載無線機140が道路線形情報取得手段に相当する。なお、路側無線機10からの情報には、対向車両の情報も含まれているので、車載無線機140は対向車両情報取得手段にも相当する。
【0093】
上記判断は、具体的には、まず、道路線形情報に基づいて、前述の起点(光ビーコン通過位置)から交差点内右折待ちノード410cまでの距離を算出する。そして、交差点内右折待ちノード410cまでの距離をステップS12で演算した走行距離が越えた場合に、交差点内右折待ちノード410cを越えたと判断する。
【0094】
ステップS13でYESと判断した場合には、ステップS14に進み、図5のステップS9と同じ処理を行なうことにより、交差点地図をヘディングアップ表示に切り替える。一方、ステップS13でNOと判断した場合には、ステップS15へ進む。
【0095】
ステップS15では、交差点の信号灯色が右折矢印点灯状態か否かを判断する。この判断がYESである場合にもステップS14へ進む。一方、この判断がNOであればステップS12へ戻る。
【0096】
ステップS16では、支援サービス提供条件を演算するためのデータを取得し、取得したデータに基づいて、支援サービス提供条件の演算を行なう。ステップS17では、支援サービス提供条件が成立したか否かを判断する。この判断がYESであれば、ステップS12へ戻る。一方、この判断がNOであればステップS18へ進む。ステップS18では、表示器120の表示画面を通常表示とする。この通常表示の意味は、ステップS4と同じである。
【0097】
図14、15は、第2実施形態における交差点地図の変化を例示する図であり、図14は、図13がYESとなって表示形式が変化した例であり、図15はステップS15がYESとなって表示形式が変化した例である。図14、図15ともに、左図は、交差点に対する自車両Aの位置および向きの実際の状況であり、右図は、各左図に対応する交差点地図である。
【0098】
まず、図14を説明する。図14においては、各左図に、道路線形情報に含まれているノード410、リンク420も示している(ただし一部のノード410、リンク420は省略)。図14(A)は、左図に示すように、自車両Aは、停止線を越えて交差点に進入し始めた状態であり、まだ、交差点内右折待ちノード410cを通過していない。そのため、図13のステップS13がNOとなる。この状態で信号灯色が通行許可を示す青であるとすると、ステップS15もNOとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0099】
図14(B)は、左図に示すように、自車両Aが交差点内右折待ちノード410cを通過している。従って、図13のステップがYESとなる。そのため、交差点地図はヘディングアップ表示となる。図14(A)の表示から図14(B)の表示に切り替わる際には、図14(B)に矢印で示すように、地図が回転したように見えることになる。なお、表示形式を交差点ターゲットアップからヘディングアップ表示に切り換える際、自車両の向きにより定まる最終的な角度の地図に直接切り替えてもよいし、また、その角度まで徐々に回転するように地図を表示してもよい。徐々に回転させる場合、車速が速いほど回転速度を速くして、最終的な状態とするまでの時間を短くするようにしてもよい。
【0100】
図14(C)は、左図に示すように、自車両Aが横断歩道終点ノード410fを通過している。支援サービスエリアが横断歩道終点ノード410fまでと定められている場合には、ステップS17がNOとなる。よって、通常表示に戻る。通常表示は、交差点地図が表示される前の表示であり、この図14の例では、表示をオフにしている。
【0101】
次に、図15を説明する。図15(A)は、左図に示すように、自車両Aは、交差点の手前(より詳しくは図示していない停止線の直前)に位置している。そのため、図13のステップS13がNOとなる。また、図15の各左図には信号の状態も示しており、文字あるいは矢印を示している部分が点灯状態であることを意味する。図15(A)では、信号灯色が通行許可を示す青(図ではBで表示)であるので、ステップS15もNOとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0102】
図15(B)は、左図に示すように、自車両Aは、向きを交差点退出路方向へかなり向けた状態で右折待ちである。この図にはノード410は示していないが、図15(B)の状態では、自車両Aは交差点内右折待ちノード410cを通過していない。従って、図13のステップS13はまだNOのままである。また、信号灯色は青のままである。従って、交差点地図は交差点ターゲットアップ表示のままである。
【0103】
図15(C)は、左図に示すように、自車両Aの位置は図15(B)と同じである。ただし、信号灯色が青から、右矢印信号が点灯状態へと変化している。そのため、ステップS15がYESとなる。よって、自車両Aの位置は図15(B)から変化していないが、交差点地図の表示形式はヘディングアップ表示へと切り替わり、図15(C)の右図に示されるように、交差点地図は、交差点退出路および右折後障害物図形220が画面上方向に近い位置の表示となる。
【0104】
以上、説明した第2実施形態では、自車両Aの位置が、交差点内右折待ちノード410cを越えるまでは、交差点地図の上方向が自車両の交差点への進入方向となっている交差点ターゲットアップ表示で交差点地図が表示されるので、交差点地図に重畳表示される対向車両図形210を認識しやすい。また、交差点内右折待ちノード410cを越えて、交差道路の横断歩道が進行方向の前方に存在する状況では、交差道路が認識し易いヘディングアップ表示で交差点地図が表示されるので、交差点地図に重畳表示される右折後障害物図形220も認識しやすい。
【0105】
また、右矢印信号となった場合には、対向車線から交差点へ車両が進入してくる可能性は低いので、この第2実施形態では、自車両Aが交差点内右折待ちノード410cを通過する前であっても、右矢印信号となった場合には、交差点地図の表示形式をヘディングアップ表示としている。これにより、右矢印信号が点灯している際に最も注意が必要な、対向車線を横断した後の障害物の存在を示す右折後障害物図形220を認識しやすくなる。
【0106】
(第3実施形態)
次に、第3実施形態を説明する。第3実施形態も、機械的構成は第1実施形態と同じである。図16は、第3実施形態において演算装置170が行う処理を示すフローチャートである。
【0107】
図16のフローチャートは、図13のステップS14に代えてステップS14−1を実行する点が第2実施形態と相違するのみである。図13のステップS14では、交差点地図の表示形式をヘディングアップ表示としていたが、この第3実施形態のステップS14−1では、交差点地図の表示形式をノードターゲットアップ表示とする。
【0108】
このノードターゲットアップ表示とは、交差点内右折待ちノード410c(表示切り替えノード)以降の2つの予め定められたノード410を結ぶ方向であって進行方向前側のノード410を画面上方向とする表示形式である。
【0109】
図17を用いてノードターゲットアップ表示を具体的に説明する。図17(A)は、破線矢印430Aにて交差点地図の上方向を示している点において図14(A)と相違するが、自車両A、対向車両B、歩行者Cの位置は、図14(A)と同じである。この図17(A)の左図の状態では、第3実施形態でも交差点ターゲットアップ表示を行なう。よって、図17(A)の右図は図14(A)の右図と同じである。
【0110】
図17(B)の左図は、図17(A)から自車両Aが進行して、交差点内右折待ちノード410cを自車両Aが通過した状態を示している。また、図17(B)の左図にも、破線矢印430Bで、右図に示す交差点地図の上方向を示している。
【0111】
図17(B)の破線矢印430Bは、交差点内右折待ちノード410cと、横断歩道終点ノード410fとを結んだ方向となっている。この破線矢印430Bにおいて、進行方向前側のノード、すなわち、横断歩道終点ノード410fを画面上方向とした交差点地図が、図17(B)の右図である。
【0112】
図17(B)の左図において、破線矢印430Bの向きと自車両Aの向きと比較すると分かるように、両者の向きは類似する。よって、ノード410を結んだ方向により交差点地図の画面上方向を決定するようにすれば、車両向きを検出するセンサの信号を用いなくても、自車両Aの向きの変化に対応して交差点地図の画面上方向を変化させることができる。従って、車両向きを検出するセンサを備えていない車両であっても、自車両の向きの変化に対応して交差点地図の画面上方向を変化させることができる。
【0113】
(第3実施形態の変形例1)
上述の第3実施形態では、対向方路との交点ノード410dおよび横断歩道開始ノード410eの2つのノードを間に挟んだ2つのノード410c、410fを結んだ方向を交差点地図の画面上方向としていた。しかし、これに限らず、交差点内右折待ちノード410cを通過した後、自車両Aが位置するリンク方向(すなわち自車両Aの直前ノードと直後ノードを結んだ方向)を交差点地図の画面上方向としてもよい。
【0114】
(第3実施形態の変形例2)
また、交差点内右折待ちノード410cを通過した時点で、横断歩道開始ノード410eと横断歩道終点ノード410fを結んだ方向であって横断歩道終点ノード410fを画面上方向とする交差点地図を表示してもよい。交差点内右折待ちノード410cを通過した直後は、自車両は、まだ、交差点退出路方向を向いていない。しかし、このようにすれば、交差点内右折待ちノード410cを通過した時点で、交差点退出路の横断歩道が画面上方向となる交差点地図が表示されるので、その横断歩道に存在する障害物をより認識しやすくなる。特に、交差点内右折待ちノード410cを通過した時点の速度が速い(所定車速以上)場合に横断歩道に比較的短時間で到達するので、このようにすることが好ましい。
【0115】
(第4実施形態)
次に、第4実施形態を説明する。第4実施形態も、機械的構成は第1実施形態と同じである。図18は、第4実施形態において演算装置170が行う処理を示すフローチャートである。
【0116】
図18のフローチャートは、図16のステップS13に代えてステップS13−1を実行し、ステップS15に代えてステップS15−1、S15−2を実行する点が第3実施形態と相違するのみである。
【0117】
ステップS13−1では、自車両Aが交差点内において右折待機位置よりも前で一旦停止したか否かを判断する。この判断がYESの場合にもステップS14へ進み、表示形式をヘディングアップ表示に切り換える。
【0118】
一方、ステップS13−1がNOであればステップS15−1へ進む。ステップS15−1では、対向車両があるか否かを判断する。なお、ここでの判断は、自車両の向きは関係なく、対向車両があるかないかのみを判断する。この判断がNO、すなわち対向車両がない場合には、ステップS14へ進み、表示形式をヘディングアップ表示に切り換える。一方、この判断がYES、すなわち対向車両が存在する場合には、ステップS15−2へ進み、自車両Aが対向車線を横断したか否かを判断する。この判断は、自車両Aが対向方路との交点ノード410dを通過したか否かにより行なう。なお、対向方路との交点ノード410dに代えて、横断歩道開始ノード410eを用いてもよい。ステップS15−2がYESであればステップS14へ進み、表示形式をヘディングアップ表示に切り換える。一方、この判断がNOであれば、ステップS12へ戻る。
【0119】
図19は、第4実施形態における交差点地図の変化を例示する図である。図19(A)は、左図に示すように、自車両Aは、交差点の手前(より詳しくは図示していない停止線の直前)に位置している。この図19(A)の位置は、交差点内ではないことから、自車両Aが停止中か走行中かに関係なく、ステップS13−1はNOとなり、ステップS15−1はYESとなる。よって、交差点地図は交差点ターゲットアップ表示となる。
【0120】
図19(B)の左図は、自車両Aが交差点内において右折待機位置440よりも前で停止した状態を示している。この場合、ステップS13−1がYESになりステップS14へ進む。よって、交差点地図は、図19(B)の右図に示されるように、ヘディングアップ表示となる。
【0121】
図19(C)の左図は、自車両Aは、交差点内において右折待機位置440よりも前で停止せずに、その右折待機位置440を通過した状態を示している。この場合、ステップS13−1はNOとなることから、自車両Aが右折待機位置440を越えても、図19(C)の右図に示すように、交差点ターゲットアップ表示を維持する。
【0122】
自車両Aが交差点内で停止した場合には、自車両Aのドライバは、交差点に進入する対向車両Bに注意を払っていると推定することができる。そこで、この第4実施形態では、自車両Aが交差点内において右折待機位置440までに停止した場合には、表示形式を交差点ターゲットアップ表示からヘディングアップ表示へ切り替える。これにより、次に注意を払う必要がある、対向車線を横断した後の障害物の存在を認識し易くしている。一方で、右折待機位置までに自車両Aが交差点内で停止しなかった場合であって(S13−1:NO)、対向車両が存在する場合には(S15−1:YES)、自車両Aの位置が待機位置ノードを越えているとしても、対向車線を横断するまでは、表示形式を対向車両を認識しやすい交差点ターゲットアップ表示に維持する。これによって、対向車両の存在に気づきやすくしている。
【0123】
(第5実施形態)
次に、第5実施形態を説明する。第5実施形態も、機械的構成は第1実施形態と同じである。図20は、第5実施形態において演算装置170が行う処理を示すフローチャートである。図20のフローチャートは、図13のフローチャートに対して、ステップS12とステップS13の間に、ステップS12−1が追加されている。
【0124】
ステップS12−1では、走行中の道路の車線数が、2以上の値に設定されたN以上であるか否かを判断する。上記Nは、交差点が大きいとみなすことができる数値(たとえば3)に設定されている。なお、車線数、Nは、それぞれ、特許請求の範囲の交差点サイズ値、基準サイズ値に相当する。
【0125】
ステップS12−1の判断は、路側無線機10から送信されてくる道路線形情報に含まれている車線数の情報を用いて行なう。この判断がYESであればステップS13へ進む。一方、この判断がNOであればステップS16へ進む。つまり、走行中の道路の車線数がN以上でなければ、ヘディングアップ表示への切り替えを行わず、交差点ターゲットアップ表示を維持するのである。
【0126】
交差点ターゲットアップ表示は、自車両Aが交差点内右折待ちノード410cを通過して進行方向が変化した場合に、交差点地図の上方向が進行方向前方を示さない状態となる。交差点が大きい場合、自車両Aが交差点内右折待ちノード410cを通過して進行方向が変化した後も、交差点ターゲットアップ表示を維持するとすれば、交差点地図の上方向が進行方向前方を示さない状態が比較的長く続くことになるため、ドライバが違和感を覚える恐れがある。そこで、この第5実施形態では、車線数がN以上の大きな交差点では、ステップS13、15を実行して、交差点ターゲットアップ表示からヘディングアップ表示へ変更するか否かを判断している。一方、小さな交差点では、表示形式を変更しても、変更後の形式で表示している期間は短時間であり、短時間のみの表示形式の変更によってドライバが煩わしさを感じてしまう恐れもある。そこで、車線数がNよりも小さい場合には、ステップS13〜S15を実行しないことで、表示形式を変更しないようにしている。
【0127】
(第6実施形態)
次に、第6実施形態を説明する。第6実施形態では、交差点までの距離に応じて、地図の表示態様を二次元的な表示態様(以下、二次元地図)および三次元的な表示態様(以下、三次元地図)の一方から他方へ切り換える。
【0128】
二次元地図は、画面上下方向および左右方向において縮尺が同一である地図を意味する。一方、三次元地図は、画面上側ほど縮尺が小さくなる地図であり、これまでに説明した交差点地図は、いずれもこれに該当する。
【0129】
図21は、第6実施形態における交差点地図の変化を例示する図である。図21の(A)〜(E)はいずれも交差点地図であり、(A)、(B)、(C)、(D)、(E)の順に表示が変化する。また、図21(A)〜(E)には、いずれも、自車両図形200、対向車両図形210、右折後障害物図形220が示されている。
【0130】
図21(A)は、交差点中心までの自車両Aの距離が、予め設定された三次元表示距離よりも遠い場合の表示態様であり、交差点地図を二次元地図で表示している。なお、この図(A)の地図も、交差点へ進入する直近の自車両の進行方向前方が画面上となる交差点ターゲットアップ表示である。
【0131】
自車両Aが進行して、交差点中心までの距離が上記三次元表示距離以下になると、図(B)に示すように、三次元地図に切り替わる。この図(B)は、図10(A)の右図と同じであり、自車両図形200、対向車両図形210の大きさにより、両者の相対距離を示している。自車両A、対向車両Bとも交差点に近づいていくにつれ、徐々に、自車両図形200、対向車両図形210が大きく表示される図(C)はその一例である。そして、これまでの実施形態におけるいずれかの判断により、表示形式をヘディングアップ表示に切り替えると判断した場合には、図(D)に示すように、ヘディングアップ表示で交差点地図を表示する。その後、さらに自車両Aが走行し、再び、交差点中心までの距離が上記三次元表示距離よりも大きくなると、図(E)に示すように、交差点地図を二次元地図に戻す。
【0132】
なお、三次元地図の表示を開始するための上記三次元表示距離は、支援サービスエリア内に含まれる距離である。ただし、二次元地図の表示開始位置は、支援サービスエリア内である必要はない。支援サービスエリア外では、路側無線機10から交差点地図を取得することはできないので、ナビゲーション装置などの他の装置から交差点の地図を取得して表示を行なう。
【0133】
この第6実施形態では、自車両が交差点に近い位置にいる場合には、実際の景観により近い表示態様である三次元地図で交差点地図が表示される。よって、交差点地図から、交差点周辺エリアに存在する障害物を認識しやすくなる。また、自車両が交差点から遠い場合には、二次元地図で交差点地図が表示されるので、自車両から遠い位置までの距離を把握しやすい。
【0134】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0135】
たとえば、交差点地図は、実際の交差点形状を反映した地図とする場合であっても、道路地図データを用いずに、車両の走行軌跡から自車両の進行方向に存在する交差点の形状を決定し、その決定した交差点の形状に基づいて交差点地図を作成し、この交差点地図を交差点ターゲットアップ表示してもよい。詳しくは図11を用いて説明する。
【0136】
演算装置160は、車車間通信により他車両Dの位置を逐次取得して他車両Dの走行軌跡300を決定する(図11(A))。また、自車両Aについても走行軌跡310を決定する。そして、それら走行軌跡300、310をそれまでと同じ曲率で延長した経路を、それぞれ、今後の他車両Dの推定経路320、今後の自車両Aの推定経路330に決定する。そして、それら2つの推定経路320、330の交点を自車両の進行方向に存在する交差点340とし、その交差点340およびその付近の推定経路320、330の形状を交差点地図とする。そして、自車両の推定経路330において、交差点340の付近が画面上下方向となるように交差点地図を回転させたものが図11(B)に示す図であり、この図11(B)の図が、交差点ターゲットアップ表示での交差点地図である。このようにして交差点地図の形状およびその交差点地図の上方向を決定すれば、道路地図データを利用していないことから、道路地図データを取得できなくても、交差点地図を表示することができる。この図11の態様においては、演算装置160は、特許請求の範囲の道路形状決定手段としても機能する。なお、推定進路320、330は、走行軌跡300、310をそれまでと同じ曲率で延長して作成する方法に限られず、走行軌跡300、310の現時点での接線方向を推定進路としてもよい。
【0137】
また、前述の支援サービス提供条件が成立していても、交差点を通過する前に、走行中の道路の信号灯が通行禁止を示す灯色(ここでは赤信号とする)となった場合には、ステップS4を実行して通常表示としてもよい。進行方向の信号が赤信号となった場合、通常、自車両は走行を停止することから、障害物の存在を通知する必要性は低下する。その一方で、赤信号での停車中は、交差点地図が表示される前の画面を確認したいことも多いと考えられるからである。この場合、青信号になったら、再度、ステップS5、S6、S8により定まる表示形式で交差点地図を表示する。
【0138】
また、前述の実施形態では、上方向固定表示として交差点ターゲットアップ表示を行っていたが、これに代えて、ノーズアップ表示を行ってもよい。
【0139】
また、前述の実施形態は右折時に障害物情報を通知するものであったが、左折時に障害物情報を通知してもよい。また、路側カメラ20に代えて、ミリ波レーダ等のレーダにより物体を検知するようにしてもよい。
【0140】
また、第5実施形態では、車線数を交差点サイズ値としていたが、交差点内右折待ちノード410cから横断歩道開始ノード410eまで、あるいは、横断歩道終点ノード410fまでの距離を交差点サイズ値としてもよい。
【0141】
また、第2実施形態では、自車両Aが交差点内右折待ちノードを通過していなくても、右矢印信号となった場合には、表示形式をヘディングアップ表示に切り替えていたが、右折待ちノードを通過したか否かの判断に代えて、対向車両が存在するか否かを判断してもよい。つまり、対向車両が存在していても、右矢印信号となった場合には、表示形式をヘディングアップ表示に切り替えるようにしてもよい。
【0142】
前述の実施形態において、ヘディングアップ表示に代えて、ノードターゲットアップ表示を用いてもよい。また、逆に、ノードターゲット表示に代えてヘディングアップ表示を用いてもよい。
【符号の説明】
【0143】
1:運転支援システム、 10:路側無線機、 20:路側カメラ、 30:光ビーコン、 40:信号灯制御器、 50:路側制御装置、 100:車載装置(車載障害物情報通知装置)、 110:車速センサ、 120:表示器、 130:スピーカ、 140:車載無線機(道路線形情報取得手段、対向車両情報取得手段)、 150:光ビーコンアンテナ、 160:車内LAN、 170:演算装置(地図表示制御手段、道路形状決定手段)、 200:自車両図形、 210:対向車両図形(障害物図形)、 220:右折後障害物図形、 300:(他車両D)の走行軌跡、 310:(自車両A)の走行軌跡、 320:(他車両D)の推定経路、 330:(自車両A)の推定経路、 340:交差点 A:自車両、 B:対向車両、 C:歩行者
【特許請求の範囲】
【請求項1】
交差点を含む交差点周辺エリア内に自車両が位置していることに基づいて、表示手段の画面に、当該交差点の地図を表示するとともに、当該交差点地図に移動体の図形を重畳表示する車載障害物情報通知装置であって、
前記表示手段は、地図の画面上方向を交差点に進入する前に定まる所定方向に固定する第1表示形式、および、前記自車両が前記交差点を曲がる際に変化する自車両方向情報に基づいて地図の画面上方向が定まる第2表示形式で前記交差点地図を表示可能であり、
前記交差点周辺エリア内に存在する移動体の情報に基づいて、前記表示手段における表示形式を、前記第1表示形式とするか前記第2表示形式とするかを判断する判断手段を備えることを特徴とする車載障害物情報通知装置。
【請求項2】
請求項1において、
前記第2表示形式が、前記自車両の向きを前記自車両方向情報とし、自車両の進行方向前方が画面上となるよう地図の画面上方向を変化させる表示形式であるヘディングアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項3】
請求項1または2において、
前記交差点周辺エリア内に存在する移動体の情報を取得する移動体情報取得手段を備え、
前記判断手段は、前記移動体情報取得手段により取得した移動体の情報に基づいて、前記表示形式を判断することを特徴とする車載障害物情報通知装置。
【請求項4】
請求項1または2において、
前記交差点周辺エリア内における前記自車両の位置を演算する自車位置演算手段を備え、
前記判断手段は、前記自車位置演算手段により演算された前記自車両の位置を前記移動体の情報として用いて、前記表示形式を判断することを特徴とする車載障害物情報通知装置。
【請求項5】
請求項3において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記移動体情報取得手段は、前記対向車線から前記交差点に進入する対向車両の情報、および、対向車線を横断後の交差道路に存在する対向車線横断後障害物の情報を取得し、
前記判断手段は、前記自車両の進行方向に前記対向車両が存在することに基づいて前記第1表示形式とすると判断し、前記対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項6】
請求項5において、
前記判断手段は、対向車線横断後障害物が存在し、且つ、自車両の進行方向に前記対向車両も存在するときは第1表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項7】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記判断手段は、前記自車位置演算手段により演算された前記自車両の位置が対向車線を横断する位置となるまでは前記第1表示形式とし、自車両の位置が対向車線を横断した位置となった後は前記第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項8】
請求項1〜7のいずれか1項において、
前記判断手段が判断した形式で前記表示手段に前記交差点地図を表示する地図表示制御手段を備えることを特徴とする車載障害物情報通知装置。
【請求項9】
請求項8において、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項10】
請求項8または9において、
路側機から交差点形状を取得する交差点形状取得手段を備え、
前記地図表示制御手段は、前記交差点形状取得手段が取得した交差点形状に基づいて前記交差点地図を作成して前記表示手段に表示することを特徴とする車載障害物情報通知装置。
【請求項11】
請求項8〜10のいずれか1項において、
前記地図表示制御手段は、前記判断手段が判断した表示形式で前記交差点地図を表示した後、自車両が交差点周辺エリアに存在しているが進行方向の信号が通行禁止を示す信号となったことに基づいて、表示手段の画面を、交差点周辺エリアに入る前の画面に戻し、その後、前記信号が通行許可を示す信号となったことに基づいて、再度、前記判断手段が判断した表示形式で前記交差点地図を表示することを特徴とする車載障害物情報通知装置。
【請求項12】
請求項5または6において、
前記対向車両の情報を車車間通信で取得することを特徴とする車載障害物情報通知装置。
【請求項13】
請求項9において、
車車間通信で取得した他車両情報から定まる他車両の走行軌跡に基づいてその他車両の今後の推定進路の形状を決定するとともに、自車両の走行軌跡に基づいて自車両の今後の推定進路の形状を決定し、且つ、それら他車両の今後の推定進路の形状と自車両の今後の推定進路の形状とに基づいて、自車両の進行方向に存在する交差点の形状を決定する道路形状決定手段を備え、
前記地図表示制御手段は、前記道路形状決定手段が決定した交差点の形状に基づいて前記交差点地図の形状を決定し、且つ、前記道路形状決定手段が決定した自車両の今後の推定進路の形状に基づいて、前記交差点ターゲットアップ表示の交差点地図における上方向を決定することを特徴とする車載障害物情報通知装置。
【請求項14】
請求項8〜13のいずれか1項において、
前記地図表示制御手段は、前記交差点地図に障害物図形を表示する障害物と自車両との距離が短くなるほど、前記交差点地図を大きい縮尺で表示するとともに、前記自車両図形および前記障害物図形も、交差点地図の縮尺に応じた大きさで表示することを特徴とする車載障害物情報通知装置。
【請求項15】
請求項1または2において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記判断手段は、前記交差点周辺エリア内に存在する移動体の情報に基づいて表示形式を第1表示形式と判断した後、自車両の進行方向の信号が、対向車線を横断して交差道路へ進入可能を示す矢印信号となったことに基づいて、前記表示形式を第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項16】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であり、
路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段を備え、
前記判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードから対向車線を横断したことを示すノードまでの間の何れかのノードである表示切り替えノードを自車両が越えたと判断したことに基づいて、前記表示形式を前記第1表示形式から前記第2表示形式へ切り替えると判断することを特徴とする車載障害物情報通知装置。
【請求項17】
請求項16において、
前記第2表示形式が、前記道路線形情報取得手段が取得したノードのうち、前記表示切り替えノード以降の2つのノードを結ぶ方向を前記自車両方向情報とし、それら2つのノードのうち進行方向前側のノードを画面上方向とする表示形式であるノードターゲットアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項18】
請求項17において、
前記表示切り替えノードを自車両が越えたと判断した場合の前記ノードターゲット表示は、横断歩道開始ノードと横断歩道終点ノードと結ぶ方向であって横断歩道終点ノードを画面上方向とする表示であることを特徴とする車載障害物情報通知装置。
【請求項19】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であり、
路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段と、
前記対向車線から前記交差点に進入する対向車両の情報を取得する対向車両情報取得手段とを備え、
前記判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードまでに、自車両が交差点内で停止した場合には、前記表示形式を前記第1表示形式から前記第2表示形式へ切り替えると判断する一方、その待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、前記対向車両が存在する場合には、自車両の位置が前記待機位置ノードを越えても表示形式を第1表示形式に維持することを特徴とする車載障害物情報通知装置。
【請求項20】
請求項1〜19のいずれか1項において、
前記判断手段は、自車両が前記交差点から予め設定された三次元表示距離内に位置している場合には、画面上側ほど縮尺が小さくなる三次元的な表示態様で前記交差点地図を表示すると判断し、自車両が前記三次元表示距離外に位置している場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で前記交差点地図を表示すると判断することを特徴とする車載障害物情報通知装置。
【請求項21】
請求項16〜19のいずれか1項において、
前記判断手段は、前記交差点の大きさを示す交差点サイズ値が、基準サイズ値以上であれば、移動体の情報に基づいて前記表示手段における表示形式を第1表示形式とするか第2表示形式とするかの判断を行うが、交差点サイズ値が基準サイズ値よりも小さい場合には前記判断を行わず、前記交差点地図の表示形式を前記第1表示形式と判断することを特徴とする車載障害物情報通知装置。
【請求項1】
交差点を含む交差点周辺エリア内に自車両が位置していることに基づいて、表示手段の画面に、当該交差点の地図を表示するとともに、当該交差点地図に移動体の図形を重畳表示する車載障害物情報通知装置であって、
前記表示手段は、地図の画面上方向を交差点に進入する前に定まる所定方向に固定する第1表示形式、および、前記自車両が前記交差点を曲がる際に変化する自車両方向情報に基づいて地図の画面上方向が定まる第2表示形式で前記交差点地図を表示可能であり、
前記交差点周辺エリア内に存在する移動体の情報に基づいて、前記表示手段における表示形式を、前記第1表示形式とするか前記第2表示形式とするかを判断する判断手段を備えることを特徴とする車載障害物情報通知装置。
【請求項2】
請求項1において、
前記第2表示形式が、前記自車両の向きを前記自車両方向情報とし、自車両の進行方向前方が画面上となるよう地図の画面上方向を変化させる表示形式であるヘディングアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項3】
請求項1または2において、
前記交差点周辺エリア内に存在する移動体の情報を取得する移動体情報取得手段を備え、
前記判断手段は、前記移動体情報取得手段により取得した移動体の情報に基づいて、前記表示形式を判断することを特徴とする車載障害物情報通知装置。
【請求項4】
請求項1または2において、
前記交差点周辺エリア内における前記自車両の位置を演算する自車位置演算手段を備え、
前記判断手段は、前記自車位置演算手段により演算された前記自車両の位置を前記移動体の情報として用いて、前記表示形式を判断することを特徴とする車載障害物情報通知装置。
【請求項5】
請求項3において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記移動体情報取得手段は、前記対向車線から前記交差点に進入する対向車両の情報、および、対向車線を横断後の交差道路に存在する対向車線横断後障害物の情報を取得し、
前記判断手段は、前記自車両の進行方向に前記対向車両が存在することに基づいて前記第1表示形式とすると判断し、前記対向車線横断後障害物が存在することに基づいて第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項6】
請求項5において、
前記判断手段は、対向車線横断後障害物が存在し、且つ、自車両の進行方向に前記対向車両も存在するときは第1表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項7】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記判断手段は、前記自車位置演算手段により演算された前記自車両の位置が対向車線を横断する位置となるまでは前記第1表示形式とし、自車両の位置が対向車線を横断した位置となった後は前記第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項8】
請求項1〜7のいずれか1項において、
前記判断手段が判断した形式で前記表示手段に前記交差点地図を表示する地図表示制御手段を備えることを特徴とする車載障害物情報通知装置。
【請求項9】
請求項8において、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項10】
請求項8または9において、
路側機から交差点形状を取得する交差点形状取得手段を備え、
前記地図表示制御手段は、前記交差点形状取得手段が取得した交差点形状に基づいて前記交差点地図を作成して前記表示手段に表示することを特徴とする車載障害物情報通知装置。
【請求項11】
請求項8〜10のいずれか1項において、
前記地図表示制御手段は、前記判断手段が判断した表示形式で前記交差点地図を表示した後、自車両が交差点周辺エリアに存在しているが進行方向の信号が通行禁止を示す信号となったことに基づいて、表示手段の画面を、交差点周辺エリアに入る前の画面に戻し、その後、前記信号が通行許可を示す信号となったことに基づいて、再度、前記判断手段が判断した表示形式で前記交差点地図を表示することを特徴とする車載障害物情報通知装置。
【請求項12】
請求項5または6において、
前記対向車両の情報を車車間通信で取得することを特徴とする車載障害物情報通知装置。
【請求項13】
請求項9において、
車車間通信で取得した他車両情報から定まる他車両の走行軌跡に基づいてその他車両の今後の推定進路の形状を決定するとともに、自車両の走行軌跡に基づいて自車両の今後の推定進路の形状を決定し、且つ、それら他車両の今後の推定進路の形状と自車両の今後の推定進路の形状とに基づいて、自車両の進行方向に存在する交差点の形状を決定する道路形状決定手段を備え、
前記地図表示制御手段は、前記道路形状決定手段が決定した交差点の形状に基づいて前記交差点地図の形状を決定し、且つ、前記道路形状決定手段が決定した自車両の今後の推定進路の形状に基づいて、前記交差点ターゲットアップ表示の交差点地図における上方向を決定することを特徴とする車載障害物情報通知装置。
【請求項14】
請求項8〜13のいずれか1項において、
前記地図表示制御手段は、前記交差点地図に障害物図形を表示する障害物と自車両との距離が短くなるほど、前記交差点地図を大きい縮尺で表示するとともに、前記自車両図形および前記障害物図形も、交差点地図の縮尺に応じた大きさで表示することを特徴とする車載障害物情報通知装置。
【請求項15】
請求項1または2において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記判断手段は、前記交差点周辺エリア内に存在する移動体の情報に基づいて表示形式を第1表示形式と判断した後、自車両の進行方向の信号が、対向車線を横断して交差道路へ進入可能を示す矢印信号となったことに基づいて、前記表示形式を第2表示形式とすると判断することを特徴とする車載障害物情報通知装置。
【請求項16】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であり、
路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段を備え、
前記判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードから対向車線を横断したことを示すノードまでの間の何れかのノードである表示切り替えノードを自車両が越えたと判断したことに基づいて、前記表示形式を前記第1表示形式から前記第2表示形式へ切り替えると判断することを特徴とする車載障害物情報通知装置。
【請求項17】
請求項16において、
前記第2表示形式が、前記道路線形情報取得手段が取得したノードのうち、前記表示切り替えノード以降の2つのノードを結ぶ方向を前記自車両方向情報とし、それら2つのノードのうち進行方向前側のノードを画面上方向とする表示形式であるノードターゲットアップ表示であることを特徴とする車載障害物情報通知装置。
【請求項18】
請求項17において、
前記表示切り替えノードを自車両が越えたと判断した場合の前記ノードターゲット表示は、横断歩道開始ノードと横断歩道終点ノードと結ぶ方向であって横断歩道終点ノードを画面上方向とする表示であることを特徴とする車載障害物情報通知装置。
【請求項19】
請求項4において、
前記車載障害物情報通知装置は、自車両が交差点を、対向車線を横断して交差道路へ進入する際に交差点周囲の障害物の存在を通知するものであって、
前記第1表示形式は、前記交差点に進入する直近の自車両の進行方向前方を画面上方向とする表示形式である交差点ターゲットアップ表示であり、
路側機から、交差点を形成する道路のノード、リンク、ノード属性を含む道路線形情報を取得する道路線形情報取得手段と、
前記対向車線から前記交差点に進入する対向車両の情報を取得する対向車両情報取得手段とを備え、
前記判断手段は、交差点内において対向車線を横断する手前に位置する待機位置ノードまでに、自車両が交差点内で停止した場合には、前記表示形式を前記第1表示形式から前記第2表示形式へ切り替えると判断する一方、その待機位置ノードまでに自車両が交差点内で停止しなかった場合であって、前記対向車両が存在する場合には、自車両の位置が前記待機位置ノードを越えても表示形式を第1表示形式に維持することを特徴とする車載障害物情報通知装置。
【請求項20】
請求項1〜19のいずれか1項において、
前記判断手段は、自車両が前記交差点から予め設定された三次元表示距離内に位置している場合には、画面上側ほど縮尺が小さくなる三次元的な表示態様で前記交差点地図を表示すると判断し、自車両が前記三次元表示距離外に位置している場合には、画面上下方向および左右方向において縮尺が同一である二次元的な表示態様で前記交差点地図を表示すると判断することを特徴とする車載障害物情報通知装置。
【請求項21】
請求項16〜19のいずれか1項において、
前記判断手段は、前記交差点の大きさを示す交差点サイズ値が、基準サイズ値以上であれば、移動体の情報に基づいて前記表示手段における表示形式を第1表示形式とするか第2表示形式とするかの判断を行うが、交差点サイズ値が基準サイズ値よりも小さい場合には前記判断を行わず、前記交差点地図の表示形式を前記第1表示形式と判断することを特徴とする車載障害物情報通知装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】

【図11】

【図12】

【図13】
【図14】

【図15】

【図16】

【図17】
【図18】
【図19】
【図20】
【図21】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−150791(P2012−150791A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−268155(P2011−268155)
【出願日】平成23年12月7日(2011.12.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年12月7日(2011.12.7)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]