
車載電波パルスレーダ装置
【課題】レーダ検出性能を損なうことなく異常発生状態の検出回路をできるだけ簡便にして安価でかつ小形な構成を実現し、RF送受信回路の感度低下や、A/D変換器および信号処理回路を含めた異常発生状態を高い信頼性で検出することのできる車載電波パルスレーダ装置を得る。
【解決手段】信号処理回路14で制御されるアンプゲイン制御回路17により、RF送受信回路15に含まれる送受信アンプのゲインを所定範囲内で個別かつ任意に強制的に変化させて、RF送受信回路15内または送受信アンテナ間に存在する漏れ波の振幅を変化させる。これにより得られたIF信号を観測し、検出値と初期調整時に記憶した正常時と比較して、回路上の異常発生状態を検出する。
【解決手段】信号処理回路14で制御されるアンプゲイン制御回路17により、RF送受信回路15に含まれる送受信アンプのゲインを所定範囲内で個別かつ任意に強制的に変化させて、RF送受信回路15内または送受信アンテナ間に存在する漏れ波の振幅を変化させる。これにより得られたIF信号を観測し、検出値と初期調整時に記憶した正常時と比較して、回路上の異常発生状態を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電波ビームを送受信して、車両から所定範囲内の障害物となる被検出物体(以下、「ターゲット」ともいう)までの距離情報(距離、速度、角度など)を検出する車載電波パルスレーダ装置に関し、特に、RF(Radio Frequency)送受信回路の感度低下や、A/D(Analog to Digital)変換器の後段側の信号処理回路を含めた回路故障などの異常状態を、安価でかつ小型な回路を用いて高い信頼性で検出するための技術に関するものである。
【背景技術】
【0002】
一般に、車載電波パルスレーダ装置においては、RF送受信回路の感度低下や、A/D変換器およびその後段側の信号処理回路を含めた回路故障などにより、回路機能が不安定になると、ACC(Adaptive Cruise Control)制御、プリクラッシュ制御、FSRA(Full Speed Range Adptive cruise control)制御などに対して、悪影響を及ぼすことが知られている。
【0003】
したがって、車載電波パルスレーダ装置の回路異常状態(特性変化や回路故障)を速やかに検出して、対処を可能にすることが要求されている。
また、同時に、コストダウンや小型化などを実現するために、できるだけ簡便に異常検出することも要求されている。
【0004】
従来から、この種の故障検出技術として、送受信RF回路内の各種アンプ系のバイアス電流および電圧などをモニタすることにより、送受信RF回路の異常を検出する手段を備えた装置が提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−59023号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の車載電波パルスレーダ装置では、RF送受信回路の異常(劣化または故障)を検出する手段として、RF送受信回路の内部の電流および電圧をモニタしているので、モニタ用の配線を引き回す必要があるうえ、部品追加などが必要となり、RF送受信回路の性能に対して悪影響を与えるとともに、コストアップや部品設置面積の増加を招くという課題があった。
【0007】
また、各部品を個々にモニタせずに、回路全体のバイアス電流でRF送受信回路を一括してモニタする場合には、個別部品のばらつきの積算を考慮すると、異常判定の閾値の設定が困難になり、結局、RF送受信回路の部品全体をモニタすることが困難になるという課題があった。
【0008】
さらに、A/D変換器の後段側の信号処理回路を含めて、パルスレーダ回路全体の異常判定を実現するためには、さらなる付加回路が必要になり、コストアップや部品設置面積の増加を招くという課題があった。
【0009】
この発明は、上記のような課題を解決するためになされたものであり、異常判定用の付加回路をできるだけ簡便な回路として安価でかつ小形な構成を実現するとともに、RF送受信回路の感度低下や故障などの異常を高い信頼性で検出することのできる車載電波パルスレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る車載電波パルスレーダ装置は、車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、電波パルスからなる送信ビームを出射するビーム送信手段と、送信ビームの送信範囲内の被検出物体から反射された受信ビームを受信するビーム受信手段と、送信ビームと受信ビームとを混合したビート信号に基づいて車両から被検出物体までの距離情報を算出する信号処理回路と、ビーム受信手段と信号処理回路との間に挿入されたA/D変換器とを備え、ビーム送信手段およびビーム受信手段は、送受信アンテナを含むRF送受信回路により構成された車載電波パルスレーダ装置において、信号処理回路は、RF送受信回路内の送受信アンプのゲインを変化させるゲイン可変手段と、RF送受信回路またはA/D変換器または信号処理回路の異常発生状態を判定する異常判定手段とを備え、ゲイン可変手段は、送受信アンプのゲインを所定範囲内で強制的に変化させて、RF送受信回路に存在する漏れ波の振幅を強制的に変化させ、異常判定手段は、送受信アンプのゲインを強制的に変化させたときに得られる漏れ波の振幅変化および周波数成分の検出値と正常時に学習された学習値とを比較し、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路またはA/D変換器または信号処理回路の故障状態を示す異常判定フラグを発生して、車両制御システムに対して異常通知を行うものである。
【発明の効果】
【0011】
この発明によれば、RF送受信回路またはA/D変換器の後段側の信号処理回路を含む回路異常の発生状態を、安価でかつ小型な回路を用いて高い信頼性で検出することができるので、安価で小型かつ高信頼性の車載電波パルスレーダ装置を得ることができる。
【図面の簡単な説明】
【0012】
【図1】この発明に係る車載電波パルスレーダ装置の基本的な構成を示すブロック図である。
【図2】この発明に係る車載電波パルスレーダ装置の動作を示すタイミングチャートである。
【図3】この発明の実施の形態1によるターゲットの検出動作を示す説明図である。
【図4】この発明の実施の形態1によるターゲットの検出動作におけるFFT結果を示す波形図である。
【図5】この発明の実施の形態1における漏れ波の一例をブロック図に重畳させて示す説明図である。
【図6】この発明の実施の形態1に係る車載電波パルスレーダ装置を示すブロック図である。
【図7】この発明の実施の形態1による強制的ゲイン操作時での漏れ波とアンプゲイン変化とIF信号との関係を示す説明図である。
【図8】この発明の実施の形態2に係る車載電波パルスレーダ装置を示すブロック図である。
【図9】この発明の実施の形態3に係る車載電波パルスレーダ装置を示すブロック図である。
【図10】この発明の実施の形態4による異常判定処理動作の一例を示す説明図である。
【図11】この発明の実施の形態4による異常判定処理動作の他の例を示す説明図である。
【図12】この発明の実施の形態5に係る車載電波パルスレーダ装置を示すブロック図である。
【図13】この発明の実施の形態6による異常判定手段の要部を車両制御システムとともに示すブロック図である。
【発明を実施するための形態】
【0013】
実施の形態1.
以下、図面を参照しながら、この発明の実施の形態1について説明する。
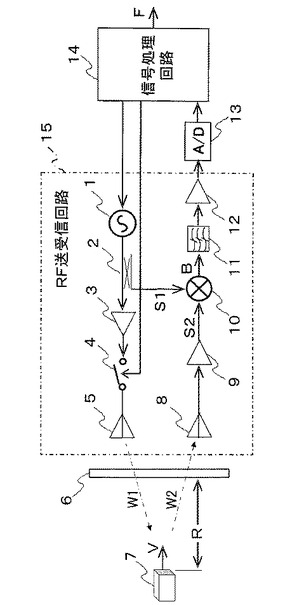
図1はこの発明の実施の形態1に係る車載電波パルスレーダ装置を示すブロック図であり、基本的なレーダ構成を被検出物体(ターゲット)7とともに示している。
【0014】
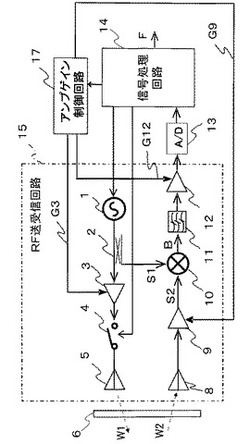
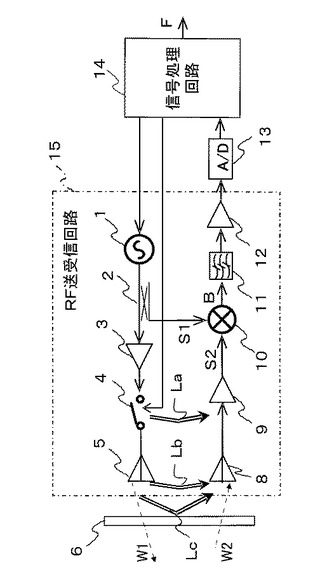
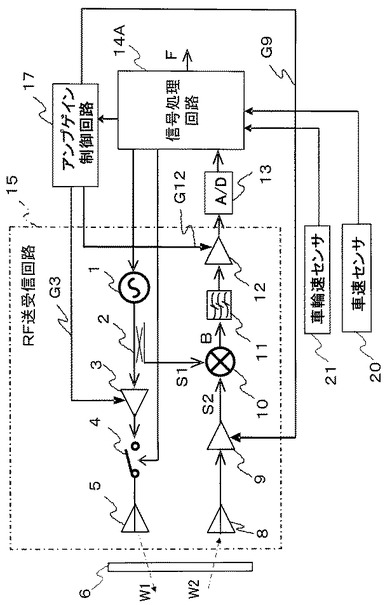
図1において、車両(図示せず)に搭載された車載電波パルスレーダ装置は、送信ビームW1の放射範囲内にあるターゲット7を検出するために、送信ビームW1を放射して受信ビームW2を受信するRF送受信回路15と、RF送受信回路15の電波送受信側に配置されたレドーム6と、RF送受信回路15の出力端子に接続されたA/D変換器13と、A/D変換器13の出力端子に接続された信号処理回路14とを備えている。
【0015】
RF送受信回路15は、発信器(VCO:Voltage Controlled Oscillator)1と、パワーデバイダ2と、送信アンプ3と、開閉スイッチ4と、送信アンテナ5と、受信アンテナ8と、受信アンプ9と、ミキサ10と、ローパスフィルタ(高域カットフィルタ)11と、IFアンプ12とを備えている。
【0016】
RF送受信回路15において、送信アンテナ5を含む回路は、ビーム送信手段を構成しており、受信アンテナ8を含む回路は、ビーム受信手段を構成している。
なお、送信アンテナ5および受信アンテナ8は、図示したようにRF送受信回路15に含まれてもよく、RF送受信回路15の外側に配置されてもよい。また、送信アンテナ5および受信アンテナ8は、送受切換器を介して単一の送受信アンテナ(図示せず)で構成されてもよい。
【0017】
信号処理回路14は、デジタル演算を実行するために、DSP(Digital Signal Processor)およびマイクロコンピュータなどの演算器により構成されている。
なお、図1では図示しないが、信号処理回路14は、RF送受信回路15内の漏れ波(後述する)に基づいて回路異常を判定する異常判定手段を備えており、回路異常を判定した場合には、図示しない車両制御システム(または、警報手段など)に対して異常判定フラグFを出力する。
【0018】
また、信号処理回路14は、アンプゲイン制御回路(後述する)を備えている。
RF送受信回路15と信号処理回路14との間に挿入されたA/D変換器13は、RF送受信回路15または信号処理回路14に含まれていてもよい。
【0019】
信号処理回路14において、まず、発振器1は、所定の送信周波数(たとえば76.5GHz)を生成するとともに、必要に応じて、信号処理回路14の制御下で、所定周波数範囲内での周波数変調を行う。
パワーデバイダ2は、発振器1からの送信周波数の送信電力を送信アンプ3およびミキサ10に分配する。
【0020】
送信アンプ3は、送信ビームW1が所定電力になるように送信信号を増幅する。
開閉スイッチ4は、信号処理回路14の制御下で、送信アンプ3の出力端子と送信アンテナ5とを接続する経路をON/OFFし、送信ビームW1をパルス変調する。
【0021】
送信アンテナ5は、送信ビームW1を車両前方に放射し、レドーム6を通して、送信ビームW1の放射範囲内にあるターゲット7に照射する。
受信アンテナ8は、ターゲット7からの反射ビームを受信ビームW2として受信する。
レドーム6は、たとえば車両の正面グリルなどと一体化構成されており、送信アンテナ5および受信アンテナ8の表面を保護している。
【0022】
受信アンプ9は、受信ビームW2に基づく受信アンテナ8からの受信信号を増幅し、ミキサ10は、増幅された受信信号S2と、パワーデバイダ2からのローカル信号S1とをミキシングして、ビート信号Bを生成する。
ローパスフィルタ11は、ミキサ10からのビート信号Bに含まれる低周波成分を通過させ、IFアンプ12は、ローパスフィルタ11を通過したビート信号Bの低周波成分を増幅する。
【0023】
A/D変換器13は、IFアンプ12の出力信号を量子化したディジタル値を信号処理回路14に入力し、信号処理回路14は、A/D変換器13からのディジタル値を処理して、車両からターゲット7までの距離R(および、ターゲット7の相対速度Vなど)を算出する。
【0024】
次に、図2〜図4を参照しながら、図1に示したこの発明の実施の形態1による基本的なレーダ動作について説明する。
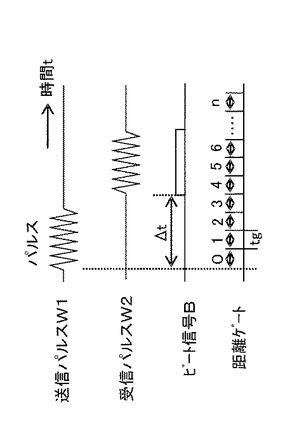
図2は送信ビームW1(送信パルス)、受信ビームW2(受信パルス)およびビート信号Bの各波形を示すタイミングチャートであり、それぞれ、ターゲット7までの距離Rに依存した遅延時間Δt、距離ゲート時間幅tgおよび距離ゲート番号「0、1、2、・・・、n」と関連させて示している。
【0025】
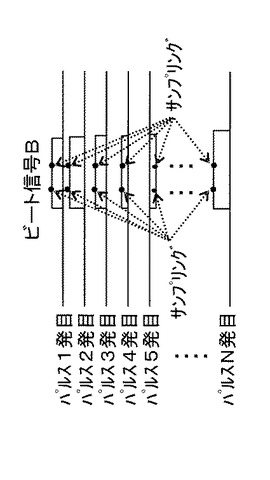
図3はこの発明の実施の形態1によるターゲット7の検出動作を示す説明図であり、N個のパルス信号に基づく各ビート信号Bとサンプリングタイミングとの関係を示している。
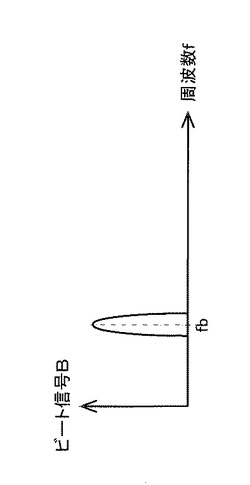
図4はFFT(高速フーリエ変換)結果を用いたターゲット7の検出処理の一例を示す説明図であり、ローカル信号S1からドップラシフトされた受信信号S2の周波数成分すなわちビート周波数fb(ドップラシフト周波数)を示している。
【0026】
まず、発振器1は、所定の周波数(たとえば、76.5GHz)のローカル信号S1を出力する。ローカル信号S1は、パワーデバイダ2および送信アンプ3を通過し、さらに開閉スイッチ4を介してパルス変調される。
パルス変調された信号は、送信アンテナ5から放射され、さらにレドーム6を通過して、送信ビームW1として空間に放射される。
【0027】
送信アンテナ5から放射された送信ビームW1は、車両から距離Rだけ離れて存在するターゲット7で反射され、図2のように、距離Rに依存した遅延時間Δtの経過後に、再びレドーム6を通過して受信アンテナ8に入力される。
このとき、目標となるターゲット7が、車両に対して相対速度Vを有する場合、受信ビームW2の周波数成分は、送信ビームW1の周波数faに対して、ビート周波数fb(図4参照)だけドップラシフトする。
【0028】
受信アンテナ8に入力された受信ビームW2は、受信アンプ9で増幅された後、ミキサ10において、パワーデバイダ2からのローカル信号S1とミキシングされ、ビート信号Bとなって出力される。
ミキサ10から生成されたビート信号Bは、ローパスフィルタ11でフィルタリングされた後、IFアンプ12で増幅され、A/D変換器13を介して信号処理回路14に入力される。
【0029】
信号処理回路14は、A/D変換器13からの入力信号に基づき、ビート信号Bの遅延時間Δtと、観測された受信ビームW2の距離ゲート「0、1、2、・・・、n」および距離ゲート時間幅tg(図2参照)とを用いて、ターゲット7までの距離Rを算出する。
【0030】
具体的には、信号処理回路14は、図3のように、A/D変換器13からの入力信号をパルスN発分だけ観測し、各ビート信号BをサンプリングしてFFT処理を施すことにより、図4のように、ドップラシフトされたビート周波数fbを求める。
【0031】
以下、信号処理回路14は、距離ゲート時間幅tgと、距離ゲート番号k(k=0〜n)と、ビート周波数fbと、送信周波数f0と、光速Cとを用いて、以下の式(1)、式(2)のように、ターゲット7までの距離Rとターゲット7の相対速度Vとを算出する。
【0032】
R=tg×k×C/2 ・・・(1)
V=fb×C/(2×f0)・・・(2)
【0033】
ところで、実際にRF送受信回路15を動作させた場合には、送信回路側から受信回路側への漏れ波が発生し、RF送受信回路15の出力信号として、漏れ波に起因した極めて低い周波数が観測されることが知られている。
また、前述のように、車載電波パルスレーダ装置の用途を考えれば、車両走行の健全性を確保するために、RF送受信回路15の感度低下や、A/D変換器13の後段側の信号処理回路14を含めた回路故障などの異常発生状態を診断することは、最重要の要求課題である。
【0034】
ここで、図5を参照しながら、図1に示したこの発明の実施の形態1に係る車載電波パルスレーダ装置の動作時に発生する漏れ波La、Lb、Lcについて説明する。
図5において、漏れ波Laは、RF送受信回路15内の開閉スイッチ4と受信アンプ9との間に発生する。
【0035】
また、漏れ波Lbは、送信アンテナ5と受信アンテナ8との間の結合により発生し、漏れ波Lcは、レドーム6(または、車両グリル)などの車両の極近距離にある物体(主として車両構造物)からの反射波として発生する。漏れ波La〜Lcは、全体的に漏れ波Lとして総称される。
【0036】
次に、図6を参照しながら、RF送受信回路15内の各アンプ3、9、12のゲイン可変制御動作について説明する。
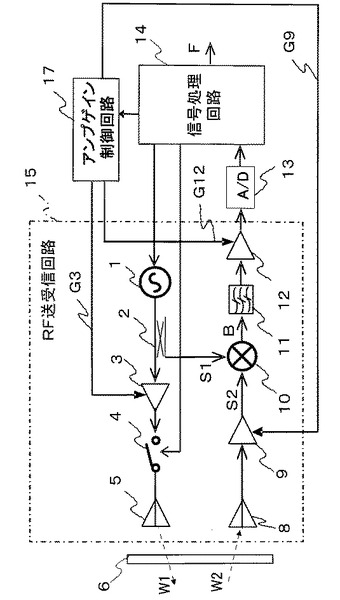
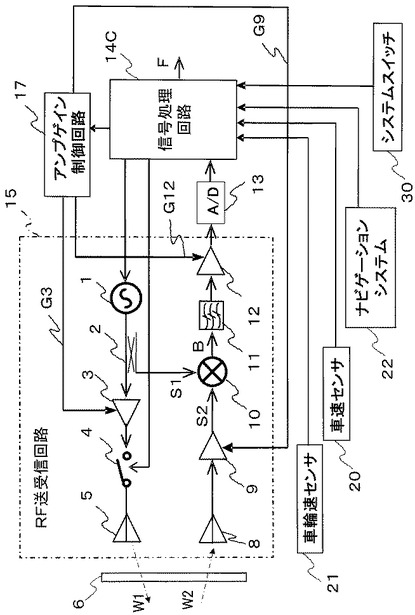
図6はこの発明の実施の形態1に係る車載電波パルスレーダ装置をさらに具体的に示すブロック図である。
【0037】
図6において、アンプゲイン制御回路17は、異常判定手段と協働するアンプゲイン可変手段を構成しており、必要に応じて、信号処理回路14の制御下でアンプゲイン制御信号G3、G12、G9を生成し、送信アンプ3、受信アンプ9およびIFアンプ12の各ゲインを個別かつ任意に制御する。
なお、アンプゲイン制御回路17は、図示したように、信号処理回路14とは別に構成してもよく、信号処理回路14内に含まれていてもよい。
【0038】
アンプゲイン制御回路17は、通常動作時のアンプゲイン制御信号G3、G12、G9として、出荷時に調整された最適値をあらかじめ保持している。
また、アンプゲイン制御回路17は、アンプゲイン制御信号G3、G12、G9の値を調整するためのD/A変換器を備えており、回路故障の診断時に、アンプゲイン制御信号G3、G12、G9を所定範囲内で強制的に変化させるように構成されている。
【0039】
以下、図7を参照しながら、送信アンプ3のゲインを強制的に変化させたときの、漏れ波によるA/D変換器13への入力信号の変化について説明する。
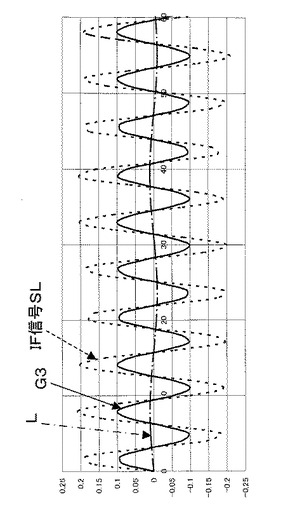
図7において、通常動作状態での漏れ波L(1点鎖線参照)に対して、ゲイン制御信号G3(実線参照)を操作して送信アンプ3のゲインを強制的に変化させると、A/D変換器13への入力信号として観測されるIF信号(漏れ波に基づくIFアンプ12の出力信号)SLは、破線波形のように変化する。
【0040】
図7に示すように、送信アンプ3のゲインを強制的に変化させることにより、図5に示した漏れ波La〜Lcの各エネルギーが、強制的なゲイン操作に応じて変化するので、A/D変換器13に入力されるIF信号SL(漏れ波)の振幅が変化する。
このとき、元々の漏れ波Lの周波数成分は極めて低いので、信号処理回路14においては、ほぼ送信アンプ3のゲイン操作の周波数に応じた振幅変化が観測されることになる。
【0041】
したがって、送信アンプ3のゲイン操作に対して観測されるIF信号SLを信号処理回路14でFFT処理すれば、ゲイン操作の周波数およびゲイン変化量に応じたピーク値を求めることができ、RF送受信回路15の特性状態や、A/D変換器13の後段側の信号処理回路14を含めた回路動作状態を確認することができる。
【0042】
また、送信アンプ3のゲイン操作に関して同一条件であらかじめ学習された初期値(正常時の学習値)と、異常診断検出時に得られたピーク値とを比較することにより、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路15の感度低下や、A/D変換器13の後段側の信号処理回路14を含めた回路故障を、高精度に検出することができる。
【0043】
なお、ゲイン操作時のゲイン制御信号G3を得るためには、アンプゲイン制御回路17に含まれるD/A変換器の値を周期的に変更することにより、容易に実現することができる。
また、アンプゲイン制御回路17がD/A変換器を備えていない場合(たとえば、初期調整時に抵抗比による固定値として設定されている場合など)には、信号処理回路14を構成するたとえばマイクロコンピュータのPWM(Pulse Width Modulation)出力と抵抗加算することなどにより、容易にゲイン操作用のゲイン制御信号G3を得ることができる。
さらに、上記説明では、送信アンプ3をゲイン操作したが、受信アンプ9をゲイン操作してもよい。
【0044】
以上のように、この発明の実施の形態1(図1〜図7)に係る車載電波パルスレーダ装置は、車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、電波パルスからなる送信ビームW1を出射するビーム送信手段と、送信ビームW1の送信範囲内の被検出物体7から反射された受信ビームW2を受信するビーム受信手段と、送信ビームW1と受信ビームW2とを混合したビート信号Bに基づいて車両から被検出物体7までの距離情報を算出する信号処理回路14と、ビーム受信手段と信号処理回路14との間に挿入されたA/D変換器13とを備えており、ビーム送信手段およびビーム受信手段は、送受信アンテナ(送信アンテナ5、受信アンテナ8)を含むRF送受信回路15により構成されている。
【0045】
信号処理回路14は、RF送受信回路15内の送受信アンプ(送信アンプ3、受信アンプ9)のゲインを変化させるゲイン可変手段(アンプゲイン制御回路17)と、RF送受信回路15またはA/D変換器13または信号処理回路14の異常発生状態を判定する異常判定手段とを備えている。
【0046】
ゲイン可変手段(アンプゲイン制御回路17)は、送受信アンプ(送信アンプ3、受信アンプ9)のゲインを所定範囲内で強制的に変化させて、RF送受信回路14(または、送受信アンテナ)に存在する漏れ波Lの振幅を強制的に変化させる。
【0047】
信号処理回路14内の異常判定手段は、送受信アンプのゲインを強制的に変化させたときに得られる漏れ波(IF信号SL)の振幅変化および周波数成分の検出値と、正常時に学習された学習値とを比較し、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路15またはA/D変換器13または信号処理回路14の故障状態を示す異常判定フラグFを発生して、車両制御システムに対して異常通知を行う。
これにより、安価でかつ小型な回路構成で、高信頼性の車載電波パルスレーダ装置を実現することができる。
【0048】
実施の形態2.
なお、上記実施の形態1では、故障診断時のゲイン操作の実行条件について言及しなかったが、図8のように、車両に常備された車速センサ20(または、車輪速センサ21)からの車両速度情報に応じてゲイン操作を実行するように構成してもよい。
【0049】
図8はこの発明の実施の形態2に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6参照)と同様のものについては、前述と同一符号を付して、または符号の後に「A」を付して詳述を省略する。
【0050】
異常判定処理用の診断時に、信号処理回路14に設けられたアンプゲイン制御回路17によりRF送受信部15のゲイン操作を実行する場合には、送受信部(車両取り付け部)の周辺にレドーム6以外の障害物が存在する場合を考慮して、障害物による誤判定を回避する必要がある。
【0051】
たとえば、停車時に周辺で子供が遊んでいる場合や、市街地一般道で車両近傍に色々な停止物(または、電波的に大きな反射物など)が存在する場合には、漏れ波の観測信号に対してノイズが重畳されるので、異常診断処理の実行を禁止する必要がある。
【0052】
特に、漏れ波に基づく異常診断処理の場合、わずかな漏れ波の変化量を観測しているので、これらノイズによって異常発生状態を誤判定する可能性が高くなるので、異常診断処理の禁止条件を設定することが重要となる。
【0053】
図8において、信号処理回路14Aは、車両側の車速センサ20または車輪速センサ21から自車両の速度(車速)や車輪速などの自車両速度情報を取得する速度情報取得手段を備えている。
【0054】
信号処理回路14Aは、車速センサ20または車輪速センサ21から取得した速度情報が、自車両の直近に障害物がないと考えられる通常走行速度(たとえば、60km/h)以上を示しており、かつ周辺にターゲット7が存在しないと判定した場合に限って、異常判定処理を実行する。
【0055】
すなわち、この発明の実施の形態2(図8)による信号処理回路14Aは、速度情報が通常走行速度未満を示す場合、または、周辺にターゲット7が存在する場合には、異常判定処理の実行を禁止する。
これにより、漏れ波に対するノイズ重畳を抑制した条件下で、高精度の異常判定を実現することが可能となる。
【0056】
実施の形態3.
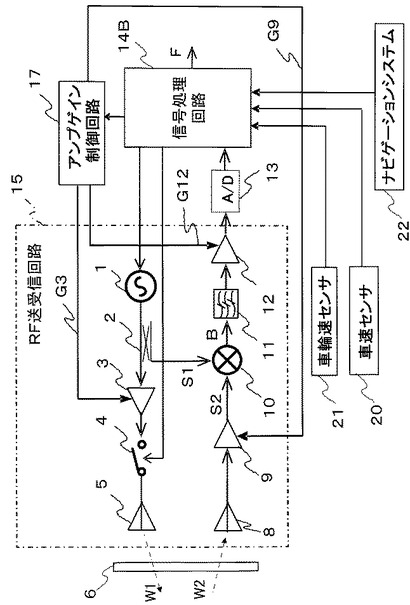
なお、上記実施の形態2(図8)では、異常判定処理の実行条件として、自車両の速度情報を用いたが、図9のように、ナビゲーションシステム22からの位置情報を用いてもよい。
図9はこの発明の実施の形態3に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6、図8参照)と同様のものについては、前述と同一符号を付して、または符号の後に「B」を付して詳述を省略する。
【0057】
前述の実施の形態2のように、異常判定処理の実行条件として速度情報を加味したとしても、たとえば市街地一般道では、人や車両の突然の動きなどが発生するなど、周辺環境(ノイズ)の予測が困難な状態にあるので、依然として異常判定における誤判定の可能性を含んでいる。
【0058】
図9において、信号処理回路14Bは、車速センサ20または車輪速センサ21からの速度情報を取得する手段のみならず、車両に搭載されたナビゲーションシステム22からの位置情報を取得する位置情報取得手段を備えている。
なお、信号処理回路14Bは、ナビゲーションシステム22からの位置情報を取得する位置情報取得手段のみを備えていてもよい。
【0059】
図9において、パルスレーダ装置が搭載された車両は、車両の位置情報に基づく走行道路情報を認識するためのナビゲーションシステム22を備えており、信号処理回路14B内の異常判定手段は、ナビゲーションシステム22により認識された車両の走行道路情報が車両専用道路を示す場合に、異常判定処理を実行する。
【0060】
すなわち、車両専用道路において、ある速度以上でターゲット7が存在しないと判定される場合に限って、故障診断処理を実行することにより、高精度の異常判定を実現することが可能となる。
【0061】
このように、この発明の実施の形態3(図9)によれば、ナビゲーションシステム22から自車両が走行している位置情報(道路状況)を取得することにより、異常判定処理を実行するうえで、よりノイズの少ない環境を選択することができる。
【0062】
実施の形態4.
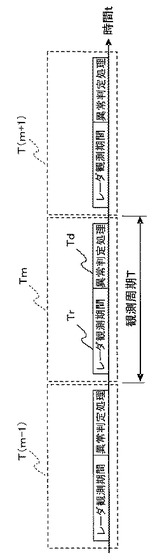
なお、上記実施の形態1〜3では、特に言及しなかったが、図10または図11のように、所定のレーダ観測周期T内の各空き時間Tdに異常判定処理を実行してもよい。
図10、図11はこの発明の実施の形態4に係る車載電波パルスレーダ装置の異常判定動作を示す説明図である。
【0063】
たとえば、前述の実施の形態2、3ように、異常判定処理の実行条件として、ターゲット7が存在しないことを加えたとしても、強制的なゲイン操作を行うために、車両の走行中にレーダ観測を中断することは、車両制御システムから見れば、一時的な目隠し状態となることに等しく、レーダ検出性能を損なう方向に影響を及ぼす可能性があるので、望ましくない。
【0064】
図10において、異常判定処理の実行期間は、各観測周期T(m−1)、Tm、T(m+1)内のレーダ観測期間Trを除いた空き時間Tdに設定されている。
一般に、レーダとしての各観測周期Tにおいて、実際に電波を送受信してレーダ観測を行うレーダ観測期間Trは、必ずしも観測周期Tの100%を占めるとは限らず、図10に示すように、空き時間Tdを含んでいる。
【0065】
そこで、信号処理回路内の異常判定手段は、所定のレーダ観測周期内の空き時間Tdにおいて、異常判定処理を実行する。
このように、空き時間Tdを利用して異常判定処理を実行することにより、本来のレーダ検出性能を損なうことなく、かつ車両走行性に何ら支障を及ぼすことなく、異常判定処理を実行することができる。
【0066】
また、1回の異常判定処理が、1観測周期T内の空き時間Tdで収まり切らない場合には、特に観測周期内で異常判定処理を完了させる必要は無いので、異常判定処理を時分割して、複数の観測周期T(m−1)〜T(m+1)にまたがって処理してもよい。
【0067】
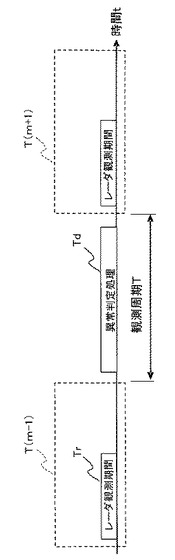
図10では、各観測期間T内の空き時間Tdごとに異常判定処理を実行したが、図11に示すように、図10内の観測周期Tmの全体を空き時間Tdとして、観測周期Tの長さに相当する空き時間Tdにおいて異常判定処理を実行してもよい。
【0068】
図11のように異常判定処理を実行する場合も、本来のレーダ検出性能に与える影響を限定することができ、前述と同様の作用効果を奏する。
ただし、図11のようにレーダ観測周期Tmを間引く場合は、ターゲット7が近距離に無い状態と判定した場合に限る、などの車両走行性の劣化を回避するための制約を設けることが必要となる。
【0069】
実施の形態5.
なお、上記実施の形態1〜4では、車両制御システムの動作中に異常判定処理を実行したが、図12に示すように、車両制御システムをON/OFFするシステムスイッチ30からのOFF信号(車両制御システムの非動作中)に応答して、信号処理回路14Cが異常判定処理を実行するように構成してもよい。
【0070】
図12はこの発明の実施の形態5に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6、図8、図9参照)と同様のものについては、前述と同一符号を付して、または符号の後に「C」を付して詳述を省略する。
【0071】
図12において、車両(図示せず)は、車載電波パルスレーダ装置を用いた車両制御システム(図示せず)をON/OFFするためのシステムスイッチ30を備えており、信号処理回路14C内の異常判定手段は、システムスイッチ30がOFF状態を示す場合に、異常判定処理を実行する。
【0072】
このように、車両制御システムをON/OFFするためのシステムスイッチ30がOFFであると判定された場合に、異常判定処理を実行することにより、レーダ検出性能に全く悪影響を与えずに異常判定処理を実行することができる。
【0073】
実施の形態6.
なお、上記実施の形態1〜5では、異常判定手段が異常発生状態と判定した場合に、1回の判定結果に応答して車両制御システム側に異常判定フラグFを通知したが、図13に示すように、異常発生フラグFが所定回数だけ連続して判定された場合に、実際の故障状態を示す異常判定フラグF’を最終出力して、車両制御システム32に対して異常通知してもよい。
【0074】
前述のように、1回の判定結果のみに応答して異常判定フラグFを出力することは、信号処理回路内の異常判定手段による異常判定処理が100%の信頼性および精度を有していることが前提となる。
しかし、実際には、わずかな漏れ波の変動を観測して異常判定処理が実行されることを考慮すると、外的要因(ノイズ)によって誤判定が発生する可能性を否定することはできない。
【0075】
したがって、図13のように、連続的に発生した複数回の異常判定フラグFに応答して、実際の異常判定フラグF’を出力することが望ましい。
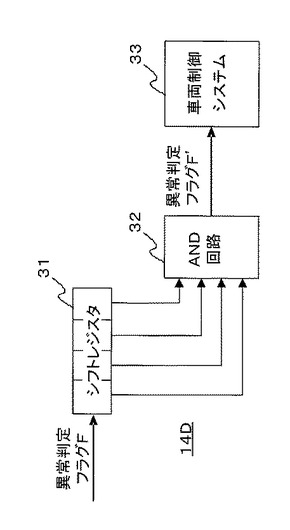
図13はこの発明の実施の形態6に係る異常判定手段の要部構成を示すブロック図である。なお、図13に示されない他の構成は、前述の実施の形態1〜5と同様である。
【0076】
図13において、信号処理回路14D内の異常判定手段は、異常判定フラグFを記憶するシフトレジスタ31と、シフトレジスタ31内の記憶データの論理積をとるAND回路32とを備えており、AND回路32の出力端子は、車両制御システム33に接続されている。
【0077】
シフトレジスタ31は、複数の異常判定フラグFを連続的に格納し、AND回路32は、シフトレジスタ31内の複数の異常判定フラグFが同時に「1」を示す場合のみに、最終的な異常判定フラグF’を車両制御システム33に出力する。
【0078】
この場合、信号処理回路14D内の異常判定手段は、異常判定処理を一定周期で繰り返し実行し、異常発生状態が所定回数だけ連続して判定された場合に、RF送受信回路15またはA/D変換器13または信号処理回路14Dの実際の故障状態と判定し、実際の故障状態を示す異常判定フラグF’を発生して、車両制御システム33に対して異常通知を行う。
【0079】
図13のように、信号処理回路14Dで複数回判定した異常判定フラグFを、異常判定処理ごとにシフトレジスタ31に蓄えておき、異常判定フラグFが複数回(たとえば、4回)連続して発生した場合のみに、車両側の制御システムに異常判定フラグF’を通知することにより、種々の外的要因(ノイズ)による誤判定を抑制することができる。
【0080】
実施の形態7.
なお、上記実施の形態1〜6では、特に言及しなかったが、送信ビームW1の電波送信電力を、電波法の規制範囲内に収まるようにクリップしてもよい。
たとえば、前述(図6、図8、図9、図12参照)のアンプゲイン制御回路17により送信アンプ3のゲインを強制的に変化させる際には、不用意にゲインを上げ過ぎれば、電波法で規定されている電波送信電力を超過してしまうことが考えられる。
【0081】
そこで、この発明の実施の形態7による異常判定手段は、送受信アンプに含まれる送信アンプ3のゲイン可変操作において、送信ビームW1の電力が電波法の規制範囲内に収まるように、ゲイン可変操作量の上限クリップ値を設定するためのクリップ手段を備えている。
【0082】
すなわち、アンプゲイン制御回路17の初期調整時において、電波法を満足するゲイン上限値をあらかじめ学習設定し、このゲイン上限値を上限クリップ値としてゲイン操作する際に適用することにより、法規に触れない異常判定処理を実現することが可能となる。
【0083】
なお、上限クリップ値は、信号処理回路14、14A〜14Dを構成するマイクロコンピュータなどのメモリ(たとえば、フラッシュROM)に記憶しておけばよい。
また、経年変化によってアンプ感度が向上することは考えにくいので、ゲイン上限値を一度学習しておけば、特に支障は生じない。
【符号の説明】
【0084】
1 発振器(VCO)、2 パワーデバイダ(電力分配器)、3 送信アンプ、4 送信スイッチ、5 送信アンテナ、6 レドーム、7 被検出物体(ターゲット)、8 受信アンテナ、9 受信アンプ、10 ミキサ、11 ローパスフィルタ(高域カットフィルタ)、12 IFアンプ、13 A/D変換器、14、14A〜14D 信号処理回路、15 RF送受信回路、17 アンプゲイン制御回路、20 車速センサ、21 車輪速センサ、22 ナビゲーションシステム、30 システムスイッチ、31 シフトレジスタ、B ビート信号、fd ビート周波数、F 異常判定フラグ、G3、G12、G9 アンプゲイン制御信号、La〜Lc、L 漏れ波、SL IF信号、Td 空き時間(異常判定処理期間)、Tr レーダ観測期間、T、Tm−1〜Tm+1 観測周期。
【技術分野】
【0001】
この発明は、電波ビームを送受信して、車両から所定範囲内の障害物となる被検出物体(以下、「ターゲット」ともいう)までの距離情報(距離、速度、角度など)を検出する車載電波パルスレーダ装置に関し、特に、RF(Radio Frequency)送受信回路の感度低下や、A/D(Analog to Digital)変換器の後段側の信号処理回路を含めた回路故障などの異常状態を、安価でかつ小型な回路を用いて高い信頼性で検出するための技術に関するものである。
【背景技術】
【0002】
一般に、車載電波パルスレーダ装置においては、RF送受信回路の感度低下や、A/D変換器およびその後段側の信号処理回路を含めた回路故障などにより、回路機能が不安定になると、ACC(Adaptive Cruise Control)制御、プリクラッシュ制御、FSRA(Full Speed Range Adptive cruise control)制御などに対して、悪影響を及ぼすことが知られている。
【0003】
したがって、車載電波パルスレーダ装置の回路異常状態(特性変化や回路故障)を速やかに検出して、対処を可能にすることが要求されている。
また、同時に、コストダウンや小型化などを実現するために、できるだけ簡便に異常検出することも要求されている。
【0004】
従来から、この種の故障検出技術として、送受信RF回路内の各種アンプ系のバイアス電流および電圧などをモニタすることにより、送受信RF回路の異常を検出する手段を備えた装置が提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平6−59023号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来の車載電波パルスレーダ装置では、RF送受信回路の異常(劣化または故障)を検出する手段として、RF送受信回路の内部の電流および電圧をモニタしているので、モニタ用の配線を引き回す必要があるうえ、部品追加などが必要となり、RF送受信回路の性能に対して悪影響を与えるとともに、コストアップや部品設置面積の増加を招くという課題があった。
【0007】
また、各部品を個々にモニタせずに、回路全体のバイアス電流でRF送受信回路を一括してモニタする場合には、個別部品のばらつきの積算を考慮すると、異常判定の閾値の設定が困難になり、結局、RF送受信回路の部品全体をモニタすることが困難になるという課題があった。
【0008】
さらに、A/D変換器の後段側の信号処理回路を含めて、パルスレーダ回路全体の異常判定を実現するためには、さらなる付加回路が必要になり、コストアップや部品設置面積の増加を招くという課題があった。
【0009】
この発明は、上記のような課題を解決するためになされたものであり、異常判定用の付加回路をできるだけ簡便な回路として安価でかつ小形な構成を実現するとともに、RF送受信回路の感度低下や故障などの異常を高い信頼性で検出することのできる車載電波パルスレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る車載電波パルスレーダ装置は、車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、電波パルスからなる送信ビームを出射するビーム送信手段と、送信ビームの送信範囲内の被検出物体から反射された受信ビームを受信するビーム受信手段と、送信ビームと受信ビームとを混合したビート信号に基づいて車両から被検出物体までの距離情報を算出する信号処理回路と、ビーム受信手段と信号処理回路との間に挿入されたA/D変換器とを備え、ビーム送信手段およびビーム受信手段は、送受信アンテナを含むRF送受信回路により構成された車載電波パルスレーダ装置において、信号処理回路は、RF送受信回路内の送受信アンプのゲインを変化させるゲイン可変手段と、RF送受信回路またはA/D変換器または信号処理回路の異常発生状態を判定する異常判定手段とを備え、ゲイン可変手段は、送受信アンプのゲインを所定範囲内で強制的に変化させて、RF送受信回路に存在する漏れ波の振幅を強制的に変化させ、異常判定手段は、送受信アンプのゲインを強制的に変化させたときに得られる漏れ波の振幅変化および周波数成分の検出値と正常時に学習された学習値とを比較し、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路またはA/D変換器または信号処理回路の故障状態を示す異常判定フラグを発生して、車両制御システムに対して異常通知を行うものである。
【発明の効果】
【0011】
この発明によれば、RF送受信回路またはA/D変換器の後段側の信号処理回路を含む回路異常の発生状態を、安価でかつ小型な回路を用いて高い信頼性で検出することができるので、安価で小型かつ高信頼性の車載電波パルスレーダ装置を得ることができる。
【図面の簡単な説明】
【0012】
【図1】この発明に係る車載電波パルスレーダ装置の基本的な構成を示すブロック図である。
【図2】この発明に係る車載電波パルスレーダ装置の動作を示すタイミングチャートである。
【図3】この発明の実施の形態1によるターゲットの検出動作を示す説明図である。
【図4】この発明の実施の形態1によるターゲットの検出動作におけるFFT結果を示す波形図である。
【図5】この発明の実施の形態1における漏れ波の一例をブロック図に重畳させて示す説明図である。
【図6】この発明の実施の形態1に係る車載電波パルスレーダ装置を示すブロック図である。
【図7】この発明の実施の形態1による強制的ゲイン操作時での漏れ波とアンプゲイン変化とIF信号との関係を示す説明図である。
【図8】この発明の実施の形態2に係る車載電波パルスレーダ装置を示すブロック図である。
【図9】この発明の実施の形態3に係る車載電波パルスレーダ装置を示すブロック図である。
【図10】この発明の実施の形態4による異常判定処理動作の一例を示す説明図である。
【図11】この発明の実施の形態4による異常判定処理動作の他の例を示す説明図である。
【図12】この発明の実施の形態5に係る車載電波パルスレーダ装置を示すブロック図である。
【図13】この発明の実施の形態6による異常判定手段の要部を車両制御システムとともに示すブロック図である。
【発明を実施するための形態】
【0013】
実施の形態1.
以下、図面を参照しながら、この発明の実施の形態1について説明する。
図1はこの発明の実施の形態1に係る車載電波パルスレーダ装置を示すブロック図であり、基本的なレーダ構成を被検出物体(ターゲット)7とともに示している。
【0014】
図1において、車両(図示せず)に搭載された車載電波パルスレーダ装置は、送信ビームW1の放射範囲内にあるターゲット7を検出するために、送信ビームW1を放射して受信ビームW2を受信するRF送受信回路15と、RF送受信回路15の電波送受信側に配置されたレドーム6と、RF送受信回路15の出力端子に接続されたA/D変換器13と、A/D変換器13の出力端子に接続された信号処理回路14とを備えている。
【0015】
RF送受信回路15は、発信器(VCO:Voltage Controlled Oscillator)1と、パワーデバイダ2と、送信アンプ3と、開閉スイッチ4と、送信アンテナ5と、受信アンテナ8と、受信アンプ9と、ミキサ10と、ローパスフィルタ(高域カットフィルタ)11と、IFアンプ12とを備えている。
【0016】
RF送受信回路15において、送信アンテナ5を含む回路は、ビーム送信手段を構成しており、受信アンテナ8を含む回路は、ビーム受信手段を構成している。
なお、送信アンテナ5および受信アンテナ8は、図示したようにRF送受信回路15に含まれてもよく、RF送受信回路15の外側に配置されてもよい。また、送信アンテナ5および受信アンテナ8は、送受切換器を介して単一の送受信アンテナ(図示せず)で構成されてもよい。
【0017】
信号処理回路14は、デジタル演算を実行するために、DSP(Digital Signal Processor)およびマイクロコンピュータなどの演算器により構成されている。
なお、図1では図示しないが、信号処理回路14は、RF送受信回路15内の漏れ波(後述する)に基づいて回路異常を判定する異常判定手段を備えており、回路異常を判定した場合には、図示しない車両制御システム(または、警報手段など)に対して異常判定フラグFを出力する。
【0018】
また、信号処理回路14は、アンプゲイン制御回路(後述する)を備えている。
RF送受信回路15と信号処理回路14との間に挿入されたA/D変換器13は、RF送受信回路15または信号処理回路14に含まれていてもよい。
【0019】
信号処理回路14において、まず、発振器1は、所定の送信周波数(たとえば76.5GHz)を生成するとともに、必要に応じて、信号処理回路14の制御下で、所定周波数範囲内での周波数変調を行う。
パワーデバイダ2は、発振器1からの送信周波数の送信電力を送信アンプ3およびミキサ10に分配する。
【0020】
送信アンプ3は、送信ビームW1が所定電力になるように送信信号を増幅する。
開閉スイッチ4は、信号処理回路14の制御下で、送信アンプ3の出力端子と送信アンテナ5とを接続する経路をON/OFFし、送信ビームW1をパルス変調する。
【0021】
送信アンテナ5は、送信ビームW1を車両前方に放射し、レドーム6を通して、送信ビームW1の放射範囲内にあるターゲット7に照射する。
受信アンテナ8は、ターゲット7からの反射ビームを受信ビームW2として受信する。
レドーム6は、たとえば車両の正面グリルなどと一体化構成されており、送信アンテナ5および受信アンテナ8の表面を保護している。
【0022】
受信アンプ9は、受信ビームW2に基づく受信アンテナ8からの受信信号を増幅し、ミキサ10は、増幅された受信信号S2と、パワーデバイダ2からのローカル信号S1とをミキシングして、ビート信号Bを生成する。
ローパスフィルタ11は、ミキサ10からのビート信号Bに含まれる低周波成分を通過させ、IFアンプ12は、ローパスフィルタ11を通過したビート信号Bの低周波成分を増幅する。
【0023】
A/D変換器13は、IFアンプ12の出力信号を量子化したディジタル値を信号処理回路14に入力し、信号処理回路14は、A/D変換器13からのディジタル値を処理して、車両からターゲット7までの距離R(および、ターゲット7の相対速度Vなど)を算出する。
【0024】
次に、図2〜図4を参照しながら、図1に示したこの発明の実施の形態1による基本的なレーダ動作について説明する。
図2は送信ビームW1(送信パルス)、受信ビームW2(受信パルス)およびビート信号Bの各波形を示すタイミングチャートであり、それぞれ、ターゲット7までの距離Rに依存した遅延時間Δt、距離ゲート時間幅tgおよび距離ゲート番号「0、1、2、・・・、n」と関連させて示している。
【0025】
図3はこの発明の実施の形態1によるターゲット7の検出動作を示す説明図であり、N個のパルス信号に基づく各ビート信号Bとサンプリングタイミングとの関係を示している。
図4はFFT(高速フーリエ変換)結果を用いたターゲット7の検出処理の一例を示す説明図であり、ローカル信号S1からドップラシフトされた受信信号S2の周波数成分すなわちビート周波数fb(ドップラシフト周波数)を示している。
【0026】
まず、発振器1は、所定の周波数(たとえば、76.5GHz)のローカル信号S1を出力する。ローカル信号S1は、パワーデバイダ2および送信アンプ3を通過し、さらに開閉スイッチ4を介してパルス変調される。
パルス変調された信号は、送信アンテナ5から放射され、さらにレドーム6を通過して、送信ビームW1として空間に放射される。
【0027】
送信アンテナ5から放射された送信ビームW1は、車両から距離Rだけ離れて存在するターゲット7で反射され、図2のように、距離Rに依存した遅延時間Δtの経過後に、再びレドーム6を通過して受信アンテナ8に入力される。
このとき、目標となるターゲット7が、車両に対して相対速度Vを有する場合、受信ビームW2の周波数成分は、送信ビームW1の周波数faに対して、ビート周波数fb(図4参照)だけドップラシフトする。
【0028】
受信アンテナ8に入力された受信ビームW2は、受信アンプ9で増幅された後、ミキサ10において、パワーデバイダ2からのローカル信号S1とミキシングされ、ビート信号Bとなって出力される。
ミキサ10から生成されたビート信号Bは、ローパスフィルタ11でフィルタリングされた後、IFアンプ12で増幅され、A/D変換器13を介して信号処理回路14に入力される。
【0029】
信号処理回路14は、A/D変換器13からの入力信号に基づき、ビート信号Bの遅延時間Δtと、観測された受信ビームW2の距離ゲート「0、1、2、・・・、n」および距離ゲート時間幅tg(図2参照)とを用いて、ターゲット7までの距離Rを算出する。
【0030】
具体的には、信号処理回路14は、図3のように、A/D変換器13からの入力信号をパルスN発分だけ観測し、各ビート信号BをサンプリングしてFFT処理を施すことにより、図4のように、ドップラシフトされたビート周波数fbを求める。
【0031】
以下、信号処理回路14は、距離ゲート時間幅tgと、距離ゲート番号k(k=0〜n)と、ビート周波数fbと、送信周波数f0と、光速Cとを用いて、以下の式(1)、式(2)のように、ターゲット7までの距離Rとターゲット7の相対速度Vとを算出する。
【0032】
R=tg×k×C/2 ・・・(1)
V=fb×C/(2×f0)・・・(2)
【0033】
ところで、実際にRF送受信回路15を動作させた場合には、送信回路側から受信回路側への漏れ波が発生し、RF送受信回路15の出力信号として、漏れ波に起因した極めて低い周波数が観測されることが知られている。
また、前述のように、車載電波パルスレーダ装置の用途を考えれば、車両走行の健全性を確保するために、RF送受信回路15の感度低下や、A/D変換器13の後段側の信号処理回路14を含めた回路故障などの異常発生状態を診断することは、最重要の要求課題である。
【0034】
ここで、図5を参照しながら、図1に示したこの発明の実施の形態1に係る車載電波パルスレーダ装置の動作時に発生する漏れ波La、Lb、Lcについて説明する。
図5において、漏れ波Laは、RF送受信回路15内の開閉スイッチ4と受信アンプ9との間に発生する。
【0035】
また、漏れ波Lbは、送信アンテナ5と受信アンテナ8との間の結合により発生し、漏れ波Lcは、レドーム6(または、車両グリル)などの車両の極近距離にある物体(主として車両構造物)からの反射波として発生する。漏れ波La〜Lcは、全体的に漏れ波Lとして総称される。
【0036】
次に、図6を参照しながら、RF送受信回路15内の各アンプ3、9、12のゲイン可変制御動作について説明する。
図6はこの発明の実施の形態1に係る車載電波パルスレーダ装置をさらに具体的に示すブロック図である。
【0037】
図6において、アンプゲイン制御回路17は、異常判定手段と協働するアンプゲイン可変手段を構成しており、必要に応じて、信号処理回路14の制御下でアンプゲイン制御信号G3、G12、G9を生成し、送信アンプ3、受信アンプ9およびIFアンプ12の各ゲインを個別かつ任意に制御する。
なお、アンプゲイン制御回路17は、図示したように、信号処理回路14とは別に構成してもよく、信号処理回路14内に含まれていてもよい。
【0038】
アンプゲイン制御回路17は、通常動作時のアンプゲイン制御信号G3、G12、G9として、出荷時に調整された最適値をあらかじめ保持している。
また、アンプゲイン制御回路17は、アンプゲイン制御信号G3、G12、G9の値を調整するためのD/A変換器を備えており、回路故障の診断時に、アンプゲイン制御信号G3、G12、G9を所定範囲内で強制的に変化させるように構成されている。
【0039】
以下、図7を参照しながら、送信アンプ3のゲインを強制的に変化させたときの、漏れ波によるA/D変換器13への入力信号の変化について説明する。
図7において、通常動作状態での漏れ波L(1点鎖線参照)に対して、ゲイン制御信号G3(実線参照)を操作して送信アンプ3のゲインを強制的に変化させると、A/D変換器13への入力信号として観測されるIF信号(漏れ波に基づくIFアンプ12の出力信号)SLは、破線波形のように変化する。
【0040】
図7に示すように、送信アンプ3のゲインを強制的に変化させることにより、図5に示した漏れ波La〜Lcの各エネルギーが、強制的なゲイン操作に応じて変化するので、A/D変換器13に入力されるIF信号SL(漏れ波)の振幅が変化する。
このとき、元々の漏れ波Lの周波数成分は極めて低いので、信号処理回路14においては、ほぼ送信アンプ3のゲイン操作の周波数に応じた振幅変化が観測されることになる。
【0041】
したがって、送信アンプ3のゲイン操作に対して観測されるIF信号SLを信号処理回路14でFFT処理すれば、ゲイン操作の周波数およびゲイン変化量に応じたピーク値を求めることができ、RF送受信回路15の特性状態や、A/D変換器13の後段側の信号処理回路14を含めた回路動作状態を確認することができる。
【0042】
また、送信アンプ3のゲイン操作に関して同一条件であらかじめ学習された初期値(正常時の学習値)と、異常診断検出時に得られたピーク値とを比較することにより、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路15の感度低下や、A/D変換器13の後段側の信号処理回路14を含めた回路故障を、高精度に検出することができる。
【0043】
なお、ゲイン操作時のゲイン制御信号G3を得るためには、アンプゲイン制御回路17に含まれるD/A変換器の値を周期的に変更することにより、容易に実現することができる。
また、アンプゲイン制御回路17がD/A変換器を備えていない場合(たとえば、初期調整時に抵抗比による固定値として設定されている場合など)には、信号処理回路14を構成するたとえばマイクロコンピュータのPWM(Pulse Width Modulation)出力と抵抗加算することなどにより、容易にゲイン操作用のゲイン制御信号G3を得ることができる。
さらに、上記説明では、送信アンプ3をゲイン操作したが、受信アンプ9をゲイン操作してもよい。
【0044】
以上のように、この発明の実施の形態1(図1〜図7)に係る車載電波パルスレーダ装置は、車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、電波パルスからなる送信ビームW1を出射するビーム送信手段と、送信ビームW1の送信範囲内の被検出物体7から反射された受信ビームW2を受信するビーム受信手段と、送信ビームW1と受信ビームW2とを混合したビート信号Bに基づいて車両から被検出物体7までの距離情報を算出する信号処理回路14と、ビーム受信手段と信号処理回路14との間に挿入されたA/D変換器13とを備えており、ビーム送信手段およびビーム受信手段は、送受信アンテナ(送信アンテナ5、受信アンテナ8)を含むRF送受信回路15により構成されている。
【0045】
信号処理回路14は、RF送受信回路15内の送受信アンプ(送信アンプ3、受信アンプ9)のゲインを変化させるゲイン可変手段(アンプゲイン制御回路17)と、RF送受信回路15またはA/D変換器13または信号処理回路14の異常発生状態を判定する異常判定手段とを備えている。
【0046】
ゲイン可変手段(アンプゲイン制御回路17)は、送受信アンプ(送信アンプ3、受信アンプ9)のゲインを所定範囲内で強制的に変化させて、RF送受信回路14(または、送受信アンテナ)に存在する漏れ波Lの振幅を強制的に変化させる。
【0047】
信号処理回路14内の異常判定手段は、送受信アンプのゲインを強制的に変化させたときに得られる漏れ波(IF信号SL)の振幅変化および周波数成分の検出値と、正常時に学習された学習値とを比較し、検出値と学習値との差分が許容範囲を逸脱したときに、RF送受信回路15またはA/D変換器13または信号処理回路14の故障状態を示す異常判定フラグFを発生して、車両制御システムに対して異常通知を行う。
これにより、安価でかつ小型な回路構成で、高信頼性の車載電波パルスレーダ装置を実現することができる。
【0048】
実施の形態2.
なお、上記実施の形態1では、故障診断時のゲイン操作の実行条件について言及しなかったが、図8のように、車両に常備された車速センサ20(または、車輪速センサ21)からの車両速度情報に応じてゲイン操作を実行するように構成してもよい。
【0049】
図8はこの発明の実施の形態2に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6参照)と同様のものについては、前述と同一符号を付して、または符号の後に「A」を付して詳述を省略する。
【0050】
異常判定処理用の診断時に、信号処理回路14に設けられたアンプゲイン制御回路17によりRF送受信部15のゲイン操作を実行する場合には、送受信部(車両取り付け部)の周辺にレドーム6以外の障害物が存在する場合を考慮して、障害物による誤判定を回避する必要がある。
【0051】
たとえば、停車時に周辺で子供が遊んでいる場合や、市街地一般道で車両近傍に色々な停止物(または、電波的に大きな反射物など)が存在する場合には、漏れ波の観測信号に対してノイズが重畳されるので、異常診断処理の実行を禁止する必要がある。
【0052】
特に、漏れ波に基づく異常診断処理の場合、わずかな漏れ波の変化量を観測しているので、これらノイズによって異常発生状態を誤判定する可能性が高くなるので、異常診断処理の禁止条件を設定することが重要となる。
【0053】
図8において、信号処理回路14Aは、車両側の車速センサ20または車輪速センサ21から自車両の速度(車速)や車輪速などの自車両速度情報を取得する速度情報取得手段を備えている。
【0054】
信号処理回路14Aは、車速センサ20または車輪速センサ21から取得した速度情報が、自車両の直近に障害物がないと考えられる通常走行速度(たとえば、60km/h)以上を示しており、かつ周辺にターゲット7が存在しないと判定した場合に限って、異常判定処理を実行する。
【0055】
すなわち、この発明の実施の形態2(図8)による信号処理回路14Aは、速度情報が通常走行速度未満を示す場合、または、周辺にターゲット7が存在する場合には、異常判定処理の実行を禁止する。
これにより、漏れ波に対するノイズ重畳を抑制した条件下で、高精度の異常判定を実現することが可能となる。
【0056】
実施の形態3.
なお、上記実施の形態2(図8)では、異常判定処理の実行条件として、自車両の速度情報を用いたが、図9のように、ナビゲーションシステム22からの位置情報を用いてもよい。
図9はこの発明の実施の形態3に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6、図8参照)と同様のものについては、前述と同一符号を付して、または符号の後に「B」を付して詳述を省略する。
【0057】
前述の実施の形態2のように、異常判定処理の実行条件として速度情報を加味したとしても、たとえば市街地一般道では、人や車両の突然の動きなどが発生するなど、周辺環境(ノイズ)の予測が困難な状態にあるので、依然として異常判定における誤判定の可能性を含んでいる。
【0058】
図9において、信号処理回路14Bは、車速センサ20または車輪速センサ21からの速度情報を取得する手段のみならず、車両に搭載されたナビゲーションシステム22からの位置情報を取得する位置情報取得手段を備えている。
なお、信号処理回路14Bは、ナビゲーションシステム22からの位置情報を取得する位置情報取得手段のみを備えていてもよい。
【0059】
図9において、パルスレーダ装置が搭載された車両は、車両の位置情報に基づく走行道路情報を認識するためのナビゲーションシステム22を備えており、信号処理回路14B内の異常判定手段は、ナビゲーションシステム22により認識された車両の走行道路情報が車両専用道路を示す場合に、異常判定処理を実行する。
【0060】
すなわち、車両専用道路において、ある速度以上でターゲット7が存在しないと判定される場合に限って、故障診断処理を実行することにより、高精度の異常判定を実現することが可能となる。
【0061】
このように、この発明の実施の形態3(図9)によれば、ナビゲーションシステム22から自車両が走行している位置情報(道路状況)を取得することにより、異常判定処理を実行するうえで、よりノイズの少ない環境を選択することができる。
【0062】
実施の形態4.
なお、上記実施の形態1〜3では、特に言及しなかったが、図10または図11のように、所定のレーダ観測周期T内の各空き時間Tdに異常判定処理を実行してもよい。
図10、図11はこの発明の実施の形態4に係る車載電波パルスレーダ装置の異常判定動作を示す説明図である。
【0063】
たとえば、前述の実施の形態2、3ように、異常判定処理の実行条件として、ターゲット7が存在しないことを加えたとしても、強制的なゲイン操作を行うために、車両の走行中にレーダ観測を中断することは、車両制御システムから見れば、一時的な目隠し状態となることに等しく、レーダ検出性能を損なう方向に影響を及ぼす可能性があるので、望ましくない。
【0064】
図10において、異常判定処理の実行期間は、各観測周期T(m−1)、Tm、T(m+1)内のレーダ観測期間Trを除いた空き時間Tdに設定されている。
一般に、レーダとしての各観測周期Tにおいて、実際に電波を送受信してレーダ観測を行うレーダ観測期間Trは、必ずしも観測周期Tの100%を占めるとは限らず、図10に示すように、空き時間Tdを含んでいる。
【0065】
そこで、信号処理回路内の異常判定手段は、所定のレーダ観測周期内の空き時間Tdにおいて、異常判定処理を実行する。
このように、空き時間Tdを利用して異常判定処理を実行することにより、本来のレーダ検出性能を損なうことなく、かつ車両走行性に何ら支障を及ぼすことなく、異常判定処理を実行することができる。
【0066】
また、1回の異常判定処理が、1観測周期T内の空き時間Tdで収まり切らない場合には、特に観測周期内で異常判定処理を完了させる必要は無いので、異常判定処理を時分割して、複数の観測周期T(m−1)〜T(m+1)にまたがって処理してもよい。
【0067】
図10では、各観測期間T内の空き時間Tdごとに異常判定処理を実行したが、図11に示すように、図10内の観測周期Tmの全体を空き時間Tdとして、観測周期Tの長さに相当する空き時間Tdにおいて異常判定処理を実行してもよい。
【0068】
図11のように異常判定処理を実行する場合も、本来のレーダ検出性能に与える影響を限定することができ、前述と同様の作用効果を奏する。
ただし、図11のようにレーダ観測周期Tmを間引く場合は、ターゲット7が近距離に無い状態と判定した場合に限る、などの車両走行性の劣化を回避するための制約を設けることが必要となる。
【0069】
実施の形態5.
なお、上記実施の形態1〜4では、車両制御システムの動作中に異常判定処理を実行したが、図12に示すように、車両制御システムをON/OFFするシステムスイッチ30からのOFF信号(車両制御システムの非動作中)に応答して、信号処理回路14Cが異常判定処理を実行するように構成してもよい。
【0070】
図12はこの発明の実施の形態5に係る車載電波パルスレーダ装置を示すブロック図であり、前述(図1、図6、図8、図9参照)と同様のものについては、前述と同一符号を付して、または符号の後に「C」を付して詳述を省略する。
【0071】
図12において、車両(図示せず)は、車載電波パルスレーダ装置を用いた車両制御システム(図示せず)をON/OFFするためのシステムスイッチ30を備えており、信号処理回路14C内の異常判定手段は、システムスイッチ30がOFF状態を示す場合に、異常判定処理を実行する。
【0072】
このように、車両制御システムをON/OFFするためのシステムスイッチ30がOFFであると判定された場合に、異常判定処理を実行することにより、レーダ検出性能に全く悪影響を与えずに異常判定処理を実行することができる。
【0073】
実施の形態6.
なお、上記実施の形態1〜5では、異常判定手段が異常発生状態と判定した場合に、1回の判定結果に応答して車両制御システム側に異常判定フラグFを通知したが、図13に示すように、異常発生フラグFが所定回数だけ連続して判定された場合に、実際の故障状態を示す異常判定フラグF’を最終出力して、車両制御システム32に対して異常通知してもよい。
【0074】
前述のように、1回の判定結果のみに応答して異常判定フラグFを出力することは、信号処理回路内の異常判定手段による異常判定処理が100%の信頼性および精度を有していることが前提となる。
しかし、実際には、わずかな漏れ波の変動を観測して異常判定処理が実行されることを考慮すると、外的要因(ノイズ)によって誤判定が発生する可能性を否定することはできない。
【0075】
したがって、図13のように、連続的に発生した複数回の異常判定フラグFに応答して、実際の異常判定フラグF’を出力することが望ましい。
図13はこの発明の実施の形態6に係る異常判定手段の要部構成を示すブロック図である。なお、図13に示されない他の構成は、前述の実施の形態1〜5と同様である。
【0076】
図13において、信号処理回路14D内の異常判定手段は、異常判定フラグFを記憶するシフトレジスタ31と、シフトレジスタ31内の記憶データの論理積をとるAND回路32とを備えており、AND回路32の出力端子は、車両制御システム33に接続されている。
【0077】
シフトレジスタ31は、複数の異常判定フラグFを連続的に格納し、AND回路32は、シフトレジスタ31内の複数の異常判定フラグFが同時に「1」を示す場合のみに、最終的な異常判定フラグF’を車両制御システム33に出力する。
【0078】
この場合、信号処理回路14D内の異常判定手段は、異常判定処理を一定周期で繰り返し実行し、異常発生状態が所定回数だけ連続して判定された場合に、RF送受信回路15またはA/D変換器13または信号処理回路14Dの実際の故障状態と判定し、実際の故障状態を示す異常判定フラグF’を発生して、車両制御システム33に対して異常通知を行う。
【0079】
図13のように、信号処理回路14Dで複数回判定した異常判定フラグFを、異常判定処理ごとにシフトレジスタ31に蓄えておき、異常判定フラグFが複数回(たとえば、4回)連続して発生した場合のみに、車両側の制御システムに異常判定フラグF’を通知することにより、種々の外的要因(ノイズ)による誤判定を抑制することができる。
【0080】
実施の形態7.
なお、上記実施の形態1〜6では、特に言及しなかったが、送信ビームW1の電波送信電力を、電波法の規制範囲内に収まるようにクリップしてもよい。
たとえば、前述(図6、図8、図9、図12参照)のアンプゲイン制御回路17により送信アンプ3のゲインを強制的に変化させる際には、不用意にゲインを上げ過ぎれば、電波法で規定されている電波送信電力を超過してしまうことが考えられる。
【0081】
そこで、この発明の実施の形態7による異常判定手段は、送受信アンプに含まれる送信アンプ3のゲイン可変操作において、送信ビームW1の電力が電波法の規制範囲内に収まるように、ゲイン可変操作量の上限クリップ値を設定するためのクリップ手段を備えている。
【0082】
すなわち、アンプゲイン制御回路17の初期調整時において、電波法を満足するゲイン上限値をあらかじめ学習設定し、このゲイン上限値を上限クリップ値としてゲイン操作する際に適用することにより、法規に触れない異常判定処理を実現することが可能となる。
【0083】
なお、上限クリップ値は、信号処理回路14、14A〜14Dを構成するマイクロコンピュータなどのメモリ(たとえば、フラッシュROM)に記憶しておけばよい。
また、経年変化によってアンプ感度が向上することは考えにくいので、ゲイン上限値を一度学習しておけば、特に支障は生じない。
【符号の説明】
【0084】
1 発振器(VCO)、2 パワーデバイダ(電力分配器)、3 送信アンプ、4 送信スイッチ、5 送信アンテナ、6 レドーム、7 被検出物体(ターゲット)、8 受信アンテナ、9 受信アンプ、10 ミキサ、11 ローパスフィルタ(高域カットフィルタ)、12 IFアンプ、13 A/D変換器、14、14A〜14D 信号処理回路、15 RF送受信回路、17 アンプゲイン制御回路、20 車速センサ、21 車輪速センサ、22 ナビゲーションシステム、30 システムスイッチ、31 シフトレジスタ、B ビート信号、fd ビート周波数、F 異常判定フラグ、G3、G12、G9 アンプゲイン制御信号、La〜Lc、L 漏れ波、SL IF信号、Td 空き時間(異常判定処理期間)、Tr レーダ観測期間、T、Tm−1〜Tm+1 観測周期。
【特許請求の範囲】
【請求項1】
車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、
電波パルスからなる送信ビームを出射するビーム送信手段と、
前記送信ビームの送信範囲内の被検出物体から反射された受信ビームを受信するビーム受信手段と、
前記送信ビームと前記受信ビームとを混合したビート信号に基づいて前記車両から前記被検出物体までの距離情報を算出する信号処理回路と、
前記ビーム受信手段と前記信号処理回路との間に挿入されたA/D変換器とを備え、
前記ビーム送信手段および前記ビーム受信手段は、送受信アンテナを含むRF送受信回路により構成された車載電波パルスレーダ装置において、
前記信号処理回路は、
前記RF送受信回路内の送受信アンプのゲインを変化させるゲイン可変手段と、
前記RF送受信回路または前記A/D変換器または前記信号処理回路の異常発生状態を判定する異常判定手段とを備え、
前記ゲイン可変手段は、前記送受信アンプのゲインを所定範囲内で強制的に変化させて、前記RF送受信回路に存在する漏れ波の振幅を強制的に変化させ、
前記異常判定手段は、前記送受信アンプのゲインを強制的に変化させたときに得られる前記漏れ波の振幅変化および周波数成分の検出値と正常時に学習された学習値とを比較し、前記検出値と前記学習値との差分が許容範囲を逸脱したときに、前記RF送受信回路または前記A/D変換器または前記信号処理回路の故障状態を示す異常判定フラグを発生して、前記車両制御システムに対して異常通知を行うことを特徴とする車載電波パルスレーダ装置。
【請求項2】
前記車両は、前記車両の速度を検出する車速センサを備え、
前記異常判定手段は、前記車両の速度が所定速度以上を示し、かつ前記目標検出物が存在しないと判定された場合に、異常判定処理を実行することを特徴とする請求項1に記載の車載電波パルスレーダ装置。
【請求項3】
前記車両は、前記車両の位置情報に基づく走行道路情報を認識するためのナビゲーションシステムを備え、
前記異常判定手段は、前記ナビゲーションシステムにより認識された前記車両の走行道路情報が車両専用道路を示す場合に、異常判定処理を実行することを特徴とする請求項1または請求項2に記載の車載電波パルスレーダ装置。
【請求項4】
前記異常判定手段は、所定のレーダ観測周期内の空き時間において、異常判定処理を実行することを特徴とする請求項1から請求項3までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項5】
前記車両は、車両制御システムをON/OFFするためのシステムスイッチを備え、
前記異常判定手段は、前記システムスイッチがOFF状態を示す場合に、異常判定処理を実行することを特徴とする請求項1から請求項4までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項6】
前記異常判定手段は、異常判定処理を一定周期で繰り返し実行し、異常発生状態が所定回数だけ連続して判定された場合に、前記RF送受信回路または前記A/D変換器または前記信号処理回路の実際の故障状態と判定し、前記実際の故障状態を示す異常判定フラグを発生して、前記車両制御システムに対して異常通知を行うことを特徴とする請求項1から請求項5までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項7】
前記異常判定手段は、前記送受信アンプに含まれる送信アンプのゲイン可変操作において、前記送信ビームの電力が電波法の規制範囲内に収まるように、ゲイン可変操作量の上限クリップ値を設定するためのクリップ手段を含むことを特徴とする請求項1から請求項6までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項1】
車両に搭載されて車両制御システムに接続された車載電波パルスレーダ装置であって、
電波パルスからなる送信ビームを出射するビーム送信手段と、
前記送信ビームの送信範囲内の被検出物体から反射された受信ビームを受信するビーム受信手段と、
前記送信ビームと前記受信ビームとを混合したビート信号に基づいて前記車両から前記被検出物体までの距離情報を算出する信号処理回路と、
前記ビーム受信手段と前記信号処理回路との間に挿入されたA/D変換器とを備え、
前記ビーム送信手段および前記ビーム受信手段は、送受信アンテナを含むRF送受信回路により構成された車載電波パルスレーダ装置において、
前記信号処理回路は、
前記RF送受信回路内の送受信アンプのゲインを変化させるゲイン可変手段と、
前記RF送受信回路または前記A/D変換器または前記信号処理回路の異常発生状態を判定する異常判定手段とを備え、
前記ゲイン可変手段は、前記送受信アンプのゲインを所定範囲内で強制的に変化させて、前記RF送受信回路に存在する漏れ波の振幅を強制的に変化させ、
前記異常判定手段は、前記送受信アンプのゲインを強制的に変化させたときに得られる前記漏れ波の振幅変化および周波数成分の検出値と正常時に学習された学習値とを比較し、前記検出値と前記学習値との差分が許容範囲を逸脱したときに、前記RF送受信回路または前記A/D変換器または前記信号処理回路の故障状態を示す異常判定フラグを発生して、前記車両制御システムに対して異常通知を行うことを特徴とする車載電波パルスレーダ装置。
【請求項2】
前記車両は、前記車両の速度を検出する車速センサを備え、
前記異常判定手段は、前記車両の速度が所定速度以上を示し、かつ前記目標検出物が存在しないと判定された場合に、異常判定処理を実行することを特徴とする請求項1に記載の車載電波パルスレーダ装置。
【請求項3】
前記車両は、前記車両の位置情報に基づく走行道路情報を認識するためのナビゲーションシステムを備え、
前記異常判定手段は、前記ナビゲーションシステムにより認識された前記車両の走行道路情報が車両専用道路を示す場合に、異常判定処理を実行することを特徴とする請求項1または請求項2に記載の車載電波パルスレーダ装置。
【請求項4】
前記異常判定手段は、所定のレーダ観測周期内の空き時間において、異常判定処理を実行することを特徴とする請求項1から請求項3までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項5】
前記車両は、車両制御システムをON/OFFするためのシステムスイッチを備え、
前記異常判定手段は、前記システムスイッチがOFF状態を示す場合に、異常判定処理を実行することを特徴とする請求項1から請求項4までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項6】
前記異常判定手段は、異常判定処理を一定周期で繰り返し実行し、異常発生状態が所定回数だけ連続して判定された場合に、前記RF送受信回路または前記A/D変換器または前記信号処理回路の実際の故障状態と判定し、前記実際の故障状態を示す異常判定フラグを発生して、前記車両制御システムに対して異常通知を行うことを特徴とする請求項1から請求項5までのいずれか1項に記載の車載電波パルスレーダ装置。
【請求項7】
前記異常判定手段は、前記送受信アンプに含まれる送信アンプのゲイン可変操作において、前記送信ビームの電力が電波法の規制範囲内に収まるように、ゲイン可変操作量の上限クリップ値を設定するためのクリップ手段を含むことを特徴とする請求項1から請求項6までのいずれか1項に記載の車載電波パルスレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−249737(P2010−249737A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−101110(P2009−101110)
【出願日】平成21年4月17日(2009.4.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月17日(2009.4.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]