
車輌の走行制御装置
【課題】乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御する。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
【解決手段】車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され(S20)、運転者特定ボタンの操作に基づき運転者が特定され(S130)、特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され(S140)、制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され(S150)、配分率ωs1、ωbに基づき転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbが演算され(S160)、それぞれ目標ヨーモーメントMts及びMtbに基づき転舵角可変装置24及び制動装置36が制御される(S400〜430)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輌の走行制御装置に係り、更に詳細には操舵輪の舵角及び車輪の制駆動力を制御することにより車輌の走行を制御する走行制御装置に係る。
【背景技術】
【0002】
自動車等の車輌の走行制御装置の一つとして、例えば本願出願人の出願にかかる下記の特許文献1に記載されている如く、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の目標ヨーモーメントの如き目標旋回制御量を演算する手段と、目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、操舵輪の転舵角制御による目標旋回制御量に基づき転舵手段を制御し、制駆動力の制御による目標旋回制御量に基づき制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置が既に知られている。
【0003】
一般に、転舵手段による操舵輪の転舵によれば、車輌の加減速を伴うことなく車輌の走行運動を制御することができるが、制駆動力の制御に比して車輌の走行運動制御の応答性が低く、また車輌のアンダーステア状態に対処することが困難である。これに対し車輪の制駆動力の制御によれば、操舵輪の転舵による走行運動制御の場合に比して応答性よく車輌の走行運動を制御することができるが、車速の増減、即ち加減速を伴うことが避けられない。
【0004】
上述の先の提案にかかる走行制御装置によれば、転舵手段及び制駆動力制御手段の応答性や特徴等に基づく所定の比率にて目標旋回制御量が操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分されるので、操舵輪の転舵角制御又は制駆動力の制御のみにより車輌の走行運動が制御される場合に比して、車輌の走行運動を好ましく効果的に制御することができる。
【特許文献1】特開2003−175749号公報
【発明の開示】
【0005】
〔発明が解決しようとする課題〕
しかし上述の走行制御装置に於いては、所定の比率は目標旋回制御量達成に対する転舵手段及び制駆動力制御手段の応答性や特徴等により決定され、乗員の運転嗜好や運転者の運転意図は考慮されないため、乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分することができない。
【0006】
尚本願出願人は、上述の走行制御装置に於いては走行路の湾曲度合や走行路に於ける横方向位置の如き走行路に対する車輌の走行状況が考慮されない点を改善すべく、出願公開前の特願2000−91509号の特許出願に於いて、走行路に対する車輌の走行状況に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分するよう構成された走行制御装置を提案したが、この先の提案にかかる走行制御装置によっても上述の問題を解消することができない。
【0007】
本発明は、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と各車輪の制駆動力を制御する制駆動力制御手段とを備えた従来の走行制御装置に於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は目標旋回制御量を操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分するに当り乗員の車輌走行嗜好や運転者の運転意図を考慮することにより、乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御することである。
〔課題を解決するための手段及び発明の効果〕
【0008】
上述の主要な課題は、本発明によれば、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者の加速操作量を検出する手段を有し、前記配分手段は前記加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置(請求項1の構成)、又は運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者により操作される切り替え手段であって、運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと前記第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードを切り替える切り替え手段を有し、前記配分手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置(請求項4の構成)、又は運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者を特定する手段を有し、前記配分手段は特定された運転者に応じて前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を可変設定することを特徴とする車輌の走行制御装置(請求項6の構成)によって達成される。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記目標旋回制御量を演算する手段は前記増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項2の構成)。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、前記配分手段は前記加速操作量が増加変化していないときには前記操舵輪の転舵角制御による目標旋回制御量の配分比率を0にするよう構成される(請求項3の構成)。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項4の構成に於いて、前記目標旋回制御量を演算する手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項5の構成)。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3乃至5の構成に於いて、前記目標旋回制御量を演算する手段は運転者の加速操作の変化度合が大きいときには前記変化度合が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項6の構成)。
【0013】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6の構成に於いて、前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されているよう構成される(請求項7の構成)。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項4乃至7の構成に於いて、前記目標旋回制御量を演算する手段は運転者の加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項8の構成)。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至8の構成に於いて、前記配分手段は前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況を考慮するよう構成される(請求項9の構成)。
【0016】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至9の構成に於いて、前記目標旋回制御量を演算する手段は車輌の目標旋回状態量を演算する手段と、車輌の実際の旋回状態量を検出する手段とを有し、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントを演算するよう構成される(請求項10の構成)。
【0017】
上記請求項1の構成によれば、運転者の加速操作量が検出され、運転者の加速操作量の増加変化率が大きいときには加速操作量の増加変化率が小さいときに比して操舵輪の転舵角制御による目標旋回制御量の配分比率が大きくされるので、運転者の加速要求が高いときには相対的に転舵角制御による目標旋回制御量の配分比率を高くして制動力の制御に起因する車輌の加速性能の悪化を防止しつつ車輌の安定的な走行を実現し、運転者の加速要求が低いときには相対的に制動力の制御による目標旋回制御量の配分比率を高くして車輌の安定化を応答性よく効果的に達成することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量を配分し車輌の走行を適正に且つ効果的に制御することができる。
【0018】
また上記請求項2の構成によれば、運転者の加速操作量の増加変化率が大きいときには加速操作量の増加変化率が小さいときに比して目標旋回制御量の大きさが小さくされるので、運転者の加速要求が高いほど目標旋回制御量の大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0019】
また上記請求項3の構成によれば、運転者の加速操作量が増加変化していないときには操舵輪の転舵角制御による目標旋回制御量の配分比率が0にされるので、運転者の加速操作量が増加変化していないときには目標旋回制御量の全てが制動力の制御による目標旋回制御量に配分され、従って運転者の加速操作量が増加変化していないときにも操舵輪の転舵角制御による目標旋回制御量の配分比率が0よりも大きく1よりも小さい値に設定される場合に比して、制動力の制御による旋回制御量の制御により車輌の走行を応答性よく効果的に安定化させることができる。
【0020】
また上記請求項4の構成によれば、運転者によって切り替え手段が操作されることにより運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードが切り替えられ、切り替え手段が第一の運転モードに切り替えられているときには切り替え手段が第二の運転モードに切り替えられているときに比して操舵輪の転舵角制御による目標旋回制御量の配分比率が大きくされるので、乗員が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて転舵角制御及び制動力の制御に対する目標旋回制御量の配分を制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の配分を制御することができる。
【0021】
また上記請求項5の構成によれば、切り替え手段が前記第一の運転モードに切り替えられているときには切り替え手段が第二の運転モードに切り替えられているときに比して目標旋回制御量の大きさが小さくされるので、乗員が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて目標旋回制御量の大きさを制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の大きさを制御することができる。
【0022】
また上記請求項6の構成によれば、運転者が特定され、特定された運転者に応じて操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率が可変設定されるので、転舵角制御及び制動力の制御に対する目標旋回制御量の配分を確実に運転者毎に最適値に制御することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の配分を最適に制御することができる。
【0023】
また上記請求項7の構成によれば、操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されているので、複雑な演算等を要することなく転舵角制御及び制動力の制御に対する目標旋回制御量の配分を確実に運転者毎に最適値に制御することができる。
【0024】
また上記請求項8の構成によれば、運転者の加速操作量の変化度合が大きいときには加速操作量の変化度合が小さいときに比して目標旋回制御量の大きさが小さくされるので、上記請求項2の場合と同様、運転者の加速要求が高いほど目標旋回制御量の大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0025】
また上記請求項9の構成によれば、操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況が考慮されるので、走行路の状況が考慮されない場合に比して、目標旋回制御量の配分を一層適正に制御することができる。
【0026】
また上記請求項10の構成によれば、車輌の目標旋回状態量が演算され、車輌の実際の旋回状態量が検出され、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントが演算されるので、走行路に対する車輌の走行状況に応じて車輌の目標ヨーモーメントを操舵輪の転舵角制御による目標ヨーモーメントと制駆動力の制御による目標ヨーモーメントとに最適に配分することができる。
〔課題解決手段の好ましい態様〕
【0027】
本発明の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、転舵手段は運転者により操作される操舵操作子に対し相対的に操舵輪を転舵駆動することにより、運転者の操舵操作とは独立に操舵輪を転舵駆動するよう構成される(好ましい態様1)。
【0028】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、制駆動力制御手段は各車輪の制動力を相互に独立に制御する手段を含み、各車輪の制動力を制御することにより各車輪の制駆動力を制御するよう構成される(好ましい態様2)。
【0029】
本発明の他の一つの好ましい態様によれば、上記請求項1の構成に於いて、配分手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくするよう構成される(好ましい態様3)。
【0030】
本発明の他の一つの好ましい態様によれば、上記請求項2の構成に於いて、目標旋回制御量を演算する手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の大きさを小さくするよう構成される(好ましい態様4)。
【0031】
本発明の他の一つの好ましい態様によれば、上記請求項7の構成に於いて、目標旋回制御量を演算する手段は特定された運転者に応じて目標旋回制御量の大きさを増減補正するよう構成される(好ましい態様5)。
【0032】
本発明の他の一つの好ましい態様によれば、上記請求項7の構成に於いて、走行路の状況は走行路の湾曲度合であるよう構成される(好ましい態様6)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項8の構成に於いて、配分手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の大きさを小さくするよう構成される(好ましい態様7)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、配分手段は車輌の目標ヨーモーメントが車輌のドリフトアウト状態を低減するための目標ヨーモーメントであるときには、車輌の目標ヨーモーメントの全てを制駆動力の制御による目標ヨーモーメントに配分するよう構成される(好ましい態様8)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、配分手段は車輌の目標ヨーモーメントが車輌のスピン状態を低減するための目標ヨーモーメントであるときには、車輌の目標ヨーモーメントの大きさが大きいほど制駆動力の制御による目標ヨーモーメントの配分比が高くなるよう、車輌の目標ヨーモーメントに応じて所定の比率を可変設定するよう構成される(好ましい態様9)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、目標旋回制御量を演算する手段は走行路の状況に応じて目標旋回制御量の大きさを増減補正するよう構成される(好ましい態様10)。
【0037】
本発明の他の一つの好ましい態様によれば、上記好ましい態様10の構成に於いて、走行路の状況は加減速操作若しくは操舵操作の頻度に基づいて分類された走行路の状況であるよう構成される(好ましい態様11)。
【発明を実施するための最良の形態】
【0038】
以下に添付の図を参照しつつ、本発明を好ましい実施例について詳細に説明する。
【実施例1】
【0039】
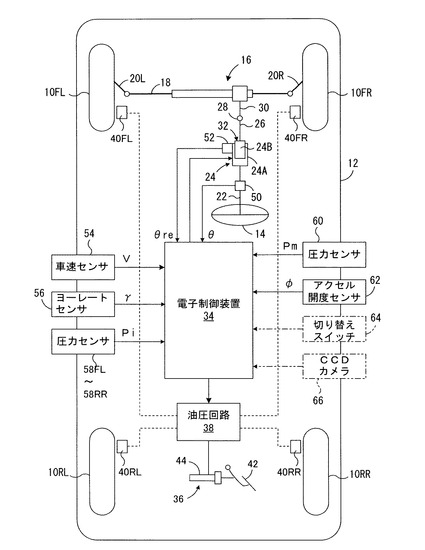
図1は自動転舵装置として機能する転舵角可変装置を備えた車輌に適用された本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【0040】
図1に於いて、10FL及び10FRはそれぞれ車輌12の操舵輪としての左右の前輪を示し、10RL及び10RRはそれぞれ左右の後輪を示している。操舵輪である左右の前輪10FL及び10FRは運転者によるステアリングホイール14の操作に応答して駆動されるラック・アンド・ピニオン型のパワーステアリング装置16によりラックバー18及びタイロッド20L及び20Rを介して転舵される。
【0041】
ステアリングホイール14は第一のステアリングシャフトとしてのアッパステアリングシャフト22、転舵角可変装置24、第二のステアリングシャフトとしてのロアステアリングシャフト26、ユニバーサルジョイント28を介してパワーステアリング装置16のピニオンシャフト30に駆動接続されている。図示の実施例に於いては、転舵角可変装置24はハウジング24Aの側にてアッパステアリングシャフト22の下端に連結され、回転子24Bの側にてロアステアリングシャフト26の上端に連結された補助転舵駆動用の電動機32を含んでいる。
【0042】
かくして転舵角可変装置24はアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転駆動することにより、ステアリングホイール14の回転角度に対する操舵輪である左右の前輪10FL及び10FRの舵角の比、即ちステアリングギヤ比を変化させるステアリングギヤ比可変装置として機能すると共に、挙動制御の目的で左右の前輪10FL及び10FRをステアリングホイール14に対し相対的に補助転舵駆動する自動転舵装置としても機能し、電子制御装置34の転舵制御部により制御される。
【0043】
特に転舵角可変装置24は、通常時にはステアリングギヤ比が所定の操舵特性を達成するギヤ比になるよう電動機32によりアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転させ、挙動制御による補助転舵駆動時には電動機32によりアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を積極的に回転させ、これにより必要に応じて左右の前輪10FL及び10FRを自動的に転舵する。
【0044】
尚アッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転駆動することができない異常が転舵角可変装置24に発生すると、図1には示されていないロック装置が作動し、アッパステアリングシャフト22に対するロアステアリングシャフト26の相対回転角度が変化しないよう、ハウジング24A及び回転子24Bの相対回転が機械的に阻止される。
【0045】
またパワーステアリング装置16は油圧式パワーステアリング装置及び電動式パワーステアリング装置の何れであってもよいが、転舵角可変装置24による前輪の補助転舵駆動により発生されステアリングホイール14に伝達される反力トルクを低減する補助操舵トルクが発生されるよう、例えば電動機と、電動機の回転トルクをラックバー18の往復動方向の力に変換するボールねじ式の如き変換機構とを有するラック同軸型の電動式パワーステアリング装置であることが好ましい。
【0046】
各車輪の制動力は制動装置36の油圧回路38によりホイールシリンダ40FL、40FR、40RL、40RR内の圧力Pi(i=fl、fr、rl、rr)、即ち制動圧が制御されることによって制御されるようになっている。図には示されていないが、油圧回路38はオイルリザーバ、オイルポンプ、種々の弁装置等を含み、各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル42の踏み込み操作に応じて駆動されるマスタシリンダ44により制御され、また必要に応じて後に詳細に説明する如く電子制御装置34により個別に制御される。
【0047】
図示の実施例に於いては、アッパステアリングシャフト22には該アッパステアリングシャフトの回転角度を操舵角θとして検出する操舵角センサ50が設けられており、転舵角可変装置24にはハウジング24A及び回転子24Bの相対回転角度をアッパステアリングシャフト22に対するロアステアリングシャフト26の相対回転角度θreとして検出する回転角度センサ52が設けられており、これらのセンサの出力は電子制御装置34へ供給される。尚操舵角センサ52はロアステアリングシャフト28Bの回転角度θsを検出するセンサに置き換えられ、相対回転角度θreは操舵角の差θs−θとして求められてもよい。
【0048】
また電子制御装置34には車速センサ54により検出された車速Vを示す信号、ヨーレートセンサ56により検出された車輌のヨーレートγを示す信号、圧力センサ58FL〜58RRにより検出された各車輪の制動圧Piを示す信号、圧力センサ60により検出されたマスタシリンダ圧力Pmを示す信号、アクセル開度センサ62よりアクセル開度φを示す信号が入力される。
【0049】
尚図1には詳細に示されていないが、電子制御装置34は転舵角可変装置24を制御する転舵制御部と、各車輪の制動力を制御する制動力制御部と、車輌の挙動を制御する挙動制御部とよりなり、各制御部はそれぞれCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続されたマイクロコンピュータを含むものであってよい。また操舵角センサ50、回転角度センサ52、ヨーレートセンサ56はそれぞれ車輌の左旋回方向への操舵又は転舵又は旋回の場合を正として操舵角θ、相対回転角度θre、ヨーレートγを検出する。
【0050】
後述の如く、電子制御装置34は運転者の操舵操作量を示す操舵角θ、相対回転角度θre、ステアリングギヤ比Rgに基づき左右前輪の実舵角δaを演算し、実舵角δa及び車速Vに基づき車輌の目標ヨーレートγtを演算する。そして電子制御装置34は、目標ヨーレートγtとヨーレートセンサ56により検出された車輌の実際のヨーレートγとの偏差Δγを演算し、ヨーレート偏差Δγに基づき該ヨーレート偏差の大きさを低減して車輌の運動を安定化させるための目標ヨーモーメントMtを車輌の目標旋回制御量として演算する。
【0051】
また電子制御装置34はアクセル開度φの単位時間当たりの変化量(時間微分値)としてアクセル開度φの変化率φdを演算し、アクセル開度φの変化率φdに応じて目標ヨーモーメントMtを増減すると共に、アクセル開度φの変化率φdに応じて転舵角制御に対する目標ヨーモーメントMtの配分率ωs及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算し、配分率ωs及びωbに基づき目標ヨーモーメントMtを転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分する。
【0052】
更に電子制御装置34は目標ヨーモーメントMtsを達成するための左右前輪の目標転舵角Δδtを演算し、左右前輪10FL及び10FRの舵角が実舵角δaと目標転舵角Δδtとの和である目標舵角δtになるよう転舵角可変装置24を制御すると共に、目標ヨーモーメントMtbを達成するための各車輪の目標制動圧Ptiを演算し、各車輪の制動圧Piがそれぞれ対応する目標制動圧Ptiになるよう制御し、これによりヨーレート偏差Δγの大きさを低減して車輌の走行運動を安定化させる。
【0053】
次に図2に示されたフローチャートを参照して図示の実施例に於いて電子制御装置34により達成される左右前輪の舵角制御による車輌の走行制御ルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0054】
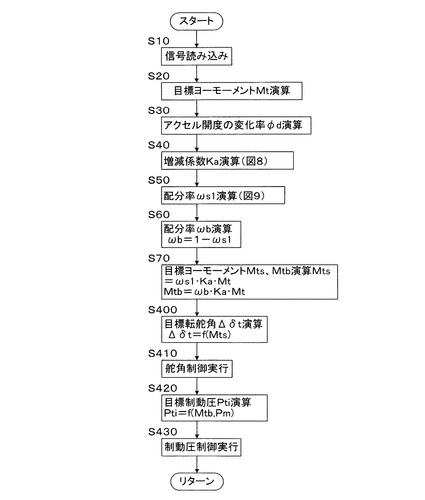
まずステップ10に於いては操舵角θsを示す信号等の読み込みが行われ、ステップ20に於いては操舵角θ及びステアリングギヤ比Rgに基づき左右前輪の推定舵角δf(=θ/Rg)が演算されると共に、HをホイールベースとしKhをスタビリティファクタとして、車速V及び推定舵角δfに基づき下記の式1に従って基準ヨーレートγeが演算されると共に、Tを時定数としsをラプラス演算子として、下記の式2に従って車輌の目標ヨーレートγtが演算される。尚基準ヨーレートγeは動的なヨーレートを考慮すべく車輌の横加速度Gyを加味して演算されてもよい。
γe=V・δf/(1+KhV2)H ……(1)
γt=γe/(1+Ts) ……(2)
【0055】
ステップ20に於いては車輌の目標ヨーレートγtと車輌の実際のヨーレートγとの偏差としてヨーレート偏差Δγが演算され、ヨーレート偏差Δγに基づき該ヨーレート偏差の大きさを低減するための目標旋回制御量としての目標ヨーモーメントMtが当技術分野に於いて公知の要領にて演算される。
【0056】
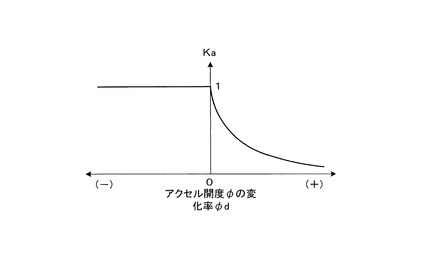
ステップ30に於いてはアクセル開度φの単位時間当たりの変化量としてアクセル開度φの変化率φdが演算され、ステップ40に於いてはアクセル開度φの変化率φdに基づき図8に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Kaが演算される。尚図8に示されている如く、増減係数Kaはアクセル開度φの変化率φdが負の値であるときには1に演算され、アクセル開度φの変化率φdが正の値であるときには変化率φdが大きくなるにつれて漸次小さくなるよう演算される。
【0057】
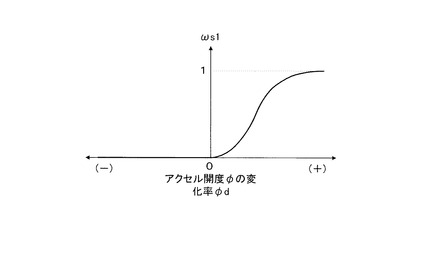
ステップ50に於いてはアクセル開度φの変化率φdに基づき図9に示されたグラフに対応するマップより転舵角制御に対する配分率ωs1が演算され、ステップ60に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算される。尚図9に示されている如く、配分率ωs1はアクセル開度φの変化率φdが負の値であるときには0に演算され、アクセル開度φの変化率φdが正の値であるときには変化率φdが大きくなるにつれて漸次大きくなるよう演算される。
【0058】
ステップ70に於いては増減係数Ka、転舵角制御に対する配分率ωs1、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式3及び4に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs1・Ka・Mt ……(3)
Mtb=ωb・Ka・Mt ……(4)
【0059】
ステップ400に於いては前輪の目標転舵角Δδtが転舵角制御の目標ヨーモーメントMtsの関数として演算され、ステップ410に於いては左右前輪が目標転舵角Δδt転舵されるよう転舵角可変装置24が制御される。
【0060】
ステップ420に於いては制動力の制御の目標ヨーモーメントMtb及びマスタシリンダ圧力Pmに基づき各車輪の目標制動圧Pti(i=fl、fr、rl、rr)がマスタシリンダ圧力Pmに基づく各車輪の目標制動圧と制動力の制御の目標ヨーモーメントMtbを達成するための各車輪の制動圧の増減量との和として演算され、ステップ430に於いては各車輪の制動圧Piがそれぞれ対応する目標制動圧Ptiになるよう制動装置36が制御される。
【0061】
かくして図示の実施例1によれば、ステップ20に於いて車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され、ステップ30に於いて運転者の加速操作量の増加変化率としてアクセル開度φの変化率φdが演算され、ステップ50に於いてアクセル開度φの変化率φdに基づき変化率φdが正の値で大きくなるにつれて漸次大きくなるよう転舵角制御に対する配分率ωs1が演算され、ステップ60に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され、ステップ70に於いて転舵角制御に対する配分率ωs1、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量としての転舵角制御の目標ヨーモーメントMts及び制動力の制御に対する目標ヨーモーメントMtの配分量としての制動力の制御の目標ヨーモーメントMtbが演算され、ステップ400〜430に於いて転舵角制御によるヨーモーメント及び制動力の制御によるヨーモーメントがそれぞれ目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbになるよう転舵角可変装置24及び制動装置36が制御される。
【0062】
従って運転者の加速操作量の増加変化率に応じて目標ヨーモーメントMtを転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbに最適に配分することができるので、運転者の加速要求が高いときには相対的に転舵角制御によるヨーモーメントを高くして制動力の制御に起因する車輌の加速性能の悪化を防止しつつ車輌の安定的な走行を実現し、運転者の加速要求が低いときには相対的に制動力の制御によるヨーモーメントを高くして車輌の安定化を応答性よく効果的に達成することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントを配分することができる。
【0063】
特に図示の実施例1によれば、ステップ40に於いてアクセル開度φの変化率φdが正の値で大きくなるにつれて漸次小さくなるようアクセル開度φの変化率φdに基づき目標ヨーモーメントの増減係数Kaが演算されるので、運転者の加速要求が高いほど車輌に付与すべき目標ヨーモーメントの大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0064】
また図示の実施例1によれば、転舵角制御に対する配分率ωs1はアクセル開度φの変化率φdが正の値でないときには0に設定され、目標ヨーモーメントMtの全てが制動力の制御による目標ヨーモーメントMtbに配分されるので、アクセル開度φの変化率φdが正の値でないときにも転舵角制御に対する配分率ωs1が0よりも大きく1よりも小さい値に設定される場合に比して、制動力の制御によるヨーモーメントにより車輌の走行を応答性よく効果的に安定化させることができる。
【実施例2】
【0065】
図3は本発明による車輌の走行制御装置の実施例2に於ける走行制御ルーチンを示すフローチャートである。尚図3に於いて図2に示されたステップと同一のステップには図2に於いて付されたステップ番号と同一のステップ番号が付されており、このことは後述の他の実施例についても同様である。
【0066】
この実施例2に於いては、電子制御装置34にはアクセル開度センサ62よりアクセル開度φを示す信号は入力されないが、図1に於いて仮想線にて示されている如く、電子制御装置34には運転者により操作される切り替えスイッチ64により設定された車輌の運転モードがスポーツモードが通常モードであるかを示す信号も入力される。車輌の運転モードがスポーツモードであるときには、車輌の運転モードが通常モードであるときに比して、運転者の運転操作に対する車輌の運動応答が高い。
【0067】
また電子制御装置34は車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて転舵角制御に対する目標ヨーモーメントMtの配分率ωs2及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算し、配分率ωs2及びωbに基づき目標ヨーモーメントMtを転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分する。
【0068】
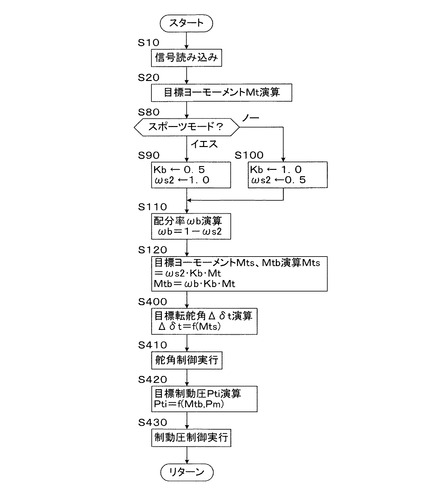
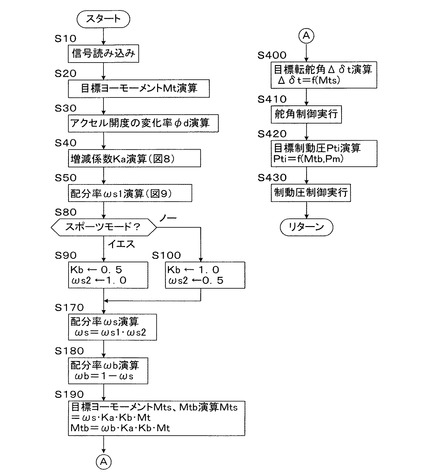
図3に示されている如く、この実施例2に於いてはステップ10、20及びステップ400〜430は上述の実施例1の場合と同様に実行され、ステップ20が完了するとステップ80へ進む。
【0069】
ステップ80に於いては切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか否かの判別が行われ、肯定判別が行われたときにはステップ90に於いて目標ヨーモーメントの増減係数Kbが0.5に設定されると共に、転舵角制御に対する配分率ωs2が1.0に設定された後ステップ110へ進み、否定判別が行われたときにはステップ100に於いて目標ヨーモーメントの増減係数Kbが1.0に設定されると共に、転舵角制御に対する配分率ωs2が0.5に設定された後ステップ110へ進む。
【0070】
ステップ110に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs2として演算され、ステップ120に於いては増減係数Kb、転舵角制御に対する配分率ωs2、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式5及び6に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs2・Kb・Mt ……(5)
Mtb=ωb・Kb・Mt ……(6)
【0071】
かくして図示の実施例2によれば、ステップ80〜110に於いて切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて増減係数Kb、転舵角制御に対する目標ヨーモーメントMtの配分率ωs2、制動力の制御に対する目標ヨーモーメントMtの配分率ωbが演算され、増減係数Kbに基づき車輌に付与されるべきヨーモーメントが増減されると共に、配分率ωs2及びωbに基づき目標ヨーモーメントMtが転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分される。
【0072】
従って車輌の運転モードがスポーツモードであるときには通常モードであるときに比して転舵角制御に対する目標ヨーモーメントの配分率ωs2が大きい値に演算されるので、運転者が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて車輌に付与されるヨーモーメントの大きさや転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントの配分を適正に制御することができる。
【0073】
特に図示の実施例2によれば、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して増減係数Kbが小さい値に設定されるので、運転者が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて車輌に付与されるヨーモーメントの大きさをも制御することができ、これにより車輌の運転モードがスポーツモードであるか通常モードであるかに応じて目標ヨーモーメントMtの配分のみが可変設定される場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさを適正に制御することができる。
【0074】
また図示の実施例2によれば、転舵角制御に対する目標ヨーモーメントの配分率ωs2は運転モードがスポーツモードであるときには通常モードであるときに比して大きく、増減係数Kbは運転モードがスポーツモードであるときには通常モードであるときに比して小さいので、配分率ωs2及び増減係数Kbの大小関係が逆である場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさを適正に制御することができる。
【実施例3】
【0075】
図4は本発明による車輌の走行制御装置の実施例3に於ける走行制御ルーチンを示すフローチャートである。
【0076】
この実施例3に於いては、図1には示されていないが、運転者が運転者特定ボタンを操作することにより運転者を特定し得るようになっている。また電子制御装置34は例えば下記の表1に示されている如く、運転者と共に運転者の運転嗜好として目標ヨーモーメントMtを増減するための増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3を登録し、登録された運転者を運転者特定ボタンに対応させ得るようになっている。
【0077】
表1
増減係数Kc 配分率ωs3
運転者A 1.0 0.2
運転者B 0.8 0.5
運転者C 0.2 1.0
【0078】
そして電子制御装置34は運転者特定ボタンの操作により運転者が特定されると、特定された運転者に応じて登録されている情報に基づき目標ヨーモーメントMtを増減するための増減係数Kcを設定すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs3を設定する。
【0079】
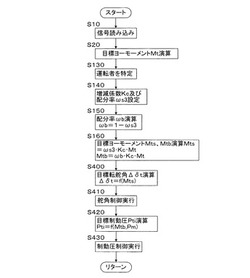
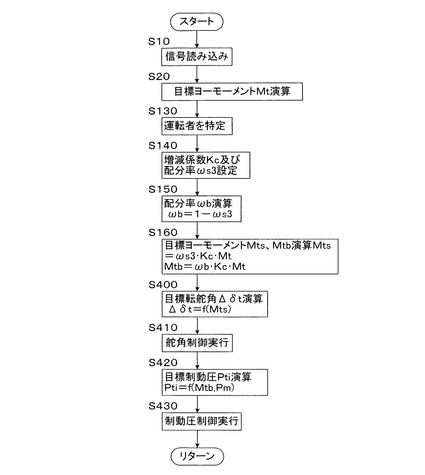
図4に示されている如く、この実施例3に於いてはステップ10、20及びステップ400〜430は上述の実施例1の場合と同様に実行され、ステップ20が完了するとステップ130へ進む。
【0080】
ステップ130に於いては運転者特定ボタンの操作に基づき運転者が特定され、ステップ140に於いては特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され、ステップ150に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs3として演算される。
【0081】
ステップ160に於いては増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式7及び8に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs3・Kc・Mt ……(7)
Mtb=ωb・Kc・Mt ……(8)
【0082】
かくして図示の実施例3によれば、ステップ130に於いて運転者特定ボタンの操作に基づき運転者が特定され、ステップ140に於いて特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され、ステップ150に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs3として演算され、ステップ160に於いて増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0083】
従って運転者に応じて増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbを確実に最適値に設定することによって、車輌に付与されるヨーモーメントの大きさや転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を確実に運転者毎に最適値に制御することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて車輌に付与されるヨーモーメントの大きさやヨーモーメントの配分を最適に制御することができる。
【0084】
特に図示の実施例3によれば、運転者に応じて増減係数Kcも可変設定されることにより、運転者に応じて車輌に付与されるヨーモーメントの大きさも制御することができ、これにより運転者に応じて目標ヨーモーメントMtの配分のみが可変設定される場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさや目標ヨーモーメントの配分を制御することができる。
【0085】
また図示の実施例3によれば、配分率ωs3及び増減係数Kcは予め登録されている情報に基づいて設定されるので、複雑な演算等を要することなく特定された運転者に応じて配分率ωs3及び増減係数Kcを設定することができる。
【0086】
尚図示の実施例3に於いては、運転者により運転者特定ボタンが操作されることにより運転者が特定されるようになっているが、運転者を特定する手段は例えば特開平2−173868、特開平2−173869、特開平3−87981、特開平9−147113、特開2001−167274、特開2002−259982の各公開公報に記載されている如く、当技術分野に於いて公知の任意の個人認識手段であってよい。
【実施例4】
【0087】
図5は実施例1及び2の修正例として構成された本発明による車輌の走行制御装置の実施例4に於ける走行制御ルーチンを示すフローチャートである。
【0088】
この実施例4に於いては、図5に示されている如く、ステップ10〜50、ステップ80〜100及びステップ400〜430は上述の実施例1及び2の場合と同様に実行され、ステップ90又は100が完了するとステップ170へ進む。
【0089】
ステップ170に於いては転舵角制御に対する目標ヨーモーメントの配分率ωsがωs1とωs2との積として演算され、ステップ180に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算される。
【0090】
ステップ190に於いては増減係数Ka及びKb、転舵角制御に対する配分率ωs、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式9及び10に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs・Ka・Kb・Mt ……(9)
Mtb=ωb・Ka・Kb・Mt ……(10)
【0091】
かくして図示の実施例4によれば、ステップ40に於いてアクセル開度φの変化率φdが正の値で大きくなるにつれて漸次小さくなるようアクセル開度φの変化率φdに基づき目標ヨーモーメントの増減係数Kaが演算され、ステップ50に於いてアクセル開度φの変化率φdに基づき変化率φdが正の値で大きくなるにつれて漸次大きくなるよう転舵角制御に対する配分率ωs1が演算され、ステップ80〜100に於いて切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて増減係数Kb及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs2が演算される。
【0092】
そしてステップ170に於いて転舵角制御に対する目標ヨーモーメントの配分率ωsがωs1とωs2との積として演算され、ステップ180に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され、増減係数Ka及びKbに基づき車輌に付与されるべきヨーモーメントが増減されると共に、配分率ωs及びωbに基づき目標ヨーモーメントMtが転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分される。
【0093】
従って上述の実施例1及び2の両方の作用効果を達成することができ、乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントの大きさやその配分を実施例1及び2の場合よりも一層最適に制御することができる。
【実施例5】
【0094】
図6は本発明による車輌の走行制御装置の実施例5に於ける走行制御ルーチンを示すフローチャートである。
【0095】
この実施例5に於いては、図1に於いて仮想線にて示されている如く、車輌12にはCCDカメラ66が搭載されており、電子制御装置34にはCCDカメラ66により撮像された車輌の前方の画像情報を示す信号も入力される。
【0096】
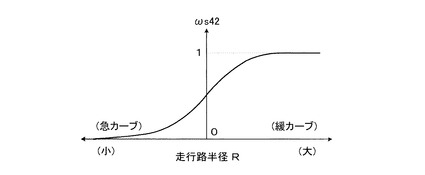
電子制御装置34は当技術分野に於いて公知の要領にて車輌の前方の画像情報を解析することにより車輌12が走行する走行路の湾曲度合として走行路半径Rを演算し、走行路半径Rに基づき目標ヨーモーメントMtを増減するための増減係数Kdを演算すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs41を演算する。また電子制御装置34は目標ヨーモーメントMtの符号及び大きさに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42を演算し、配分率ωs41及びωs42に基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs4及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算する。
【0097】
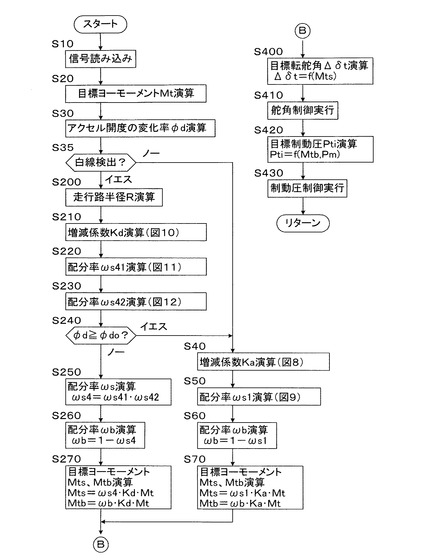
この実施例5に於いては、図6に示されている如く、ステップ10〜30、ステップ40〜70及びステップ400〜430は上述の実施例1及び2の場合と同様に実行され、ステップ30が完了するとステップ35へ進む。
【0098】
ステップ35に於いてはCCDカメラ66により撮像された車輌前方の画像に対し当技術分野に於いて公知の画像解析処理が行われることにより、車輌12が走行する走行路の白線を検出できているか否かの判別が行われ、否定判別が行われたときにはステップ40〜70が実行された後ステップ400へ進み、肯定判別が行われたときにはステップ200へ進む。
【0099】
ステップ200に於いては上記画像解析処理により得られた走行路の情報に基づき、走行路の形状が推定されると共に、推定された走行路の形状に基づき走行路の湾曲度合として走行路半径Rが演算される。
【0100】
ステップ210に於いては走行路半径Rに基づき図3に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Kaが演算され、ステップ220に於いては目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、ステップ230に於いては走行路半径Rに基づき図3に示されたグラフに対応するマップより転舵角制御に対する目標ヨーモーメントの配分率ωs41が演算される。
【0101】
ステップ240に於いてはアクセル開度φの変化率φdが基準値φdo(正の定数)以上であるか否かの判別が行われ、肯定判別が行われたときにはステップ40へ進み、否定判別が行われたときにはステップ250へ進む
【0102】
ステップ250に於いては配分率ωs41とωs42との積として転舵角制御に対する目標ヨーモーメントMtの配分率ωs4が演算され、ステップ260に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs4として演算される。
【0103】
ステップ270に於いては増減係数Kd、転舵角制御に対する配分率ωs4、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式11及び12に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs4・Kd・Mt ……(11)
Mtb=ωb・Kd・Mt ……(12)
【0104】
かくして図示の実施例5によれば、ステップ35及び200に於いて走行路の湾曲度合として走行路半径Rが演算され、ステップ210に於いて走行路のカーブが急であるほど大きくなるよう走行路半径Rに基づき目標ヨーモーメントの増減係数Kaが演算され、ステップ220に於いて目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、ステップ230に於いて走行路のカーブが急であるほど小さくなるよう走行路半径Rに基づき転舵角制御に対する目標ヨーモーメントの配分率ωs41が演算される。
【0105】
そしてステップ240に於いてアクセル開度φの変化率φdが基準値φdo以上ではないと判別されると、ステップ250に於いて配分率ωs41とωs42との積として転舵角制御に対する目標ヨーモーメントMtの配分率ωs4が演算され、ステップ260に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs4として演算され、ステップ270に於いて増減係数Kd、転舵角制御に対する配分率ωs4、制動力の制御に対する配分率ωbに基づき、転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0106】
従って走行路のカーブが急であるほど転舵角制御に対する目標ヨーモーメントの配分が小さくなると共に制動力の制御に対する目標ヨーモーメントの配分が大きくなるので、走行路のカーブの度合に応じて転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を最適に制御することができる。
【0107】
特に図示の実施例5によれば、ステップ210に於いて走行路のカーブが急であるほど大きくなるよう走行路半径Rに基づき目標ヨーモーメントの増減係数Kaが演算されるので、走行路のカーブが急であるほど車輌の走行を安定化させるためのヨーモーメントの大きさを大きくして車輌の走行運動を確実に且つ効果的に安定化させることができる。
【0108】
また図示の実施例5によれば、ステップ220に於いて目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、目標ヨーモーメントMtに基づく転舵角制御に対する配分率ωs42は目標ヨーモーメントMtがアンダーステア抑制ヨーモーメントであるときには0に設定されるので、車輌がアンダーステア状態にあり前輪の横力を増大させることができない状況に於いて目標ヨーモーメントMtが不必要に舵角制御の目標ヨーモーメントMtsに配分されることを防止することができ、また目標ヨーモーメントMtに基づく転舵角制御に対する配分率ωs42は目標ヨーモーメントMtがオーバーステア抑制ヨーモーメントであるときには目標ヨーモーメントMtの大きさが大きいほど小さくなるよう設定されるので、オーバーステア状態を抑制する必要性が高いほど制動力の制御に対する目標ヨーモーメントMtの配分量を多くし、車輌のオーバーステア状態を効果的に抑制することができる。
【0109】
また図示の実施例5によれば、ステップ35に於いて走行路の白線が検出されていないと判別された場合や、ステップ240に於いてアクセル開度φの変化率φdが基準値φdo以上であると判別されると、ステップ40〜70が実行されるので、運転者の加速要求が高いときには上述の実施例1の場合と同様、乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現することができる。
【実施例6】
【0110】
図7は本発明による車輌の走行制御装置の実施例6に於ける走行制御ルーチンを示すフローチャートである。
【0111】
この実施例6に於いては、アクセル開度センサ62よりアクセル開度φを示す信号が入力されると共に、図1に於いて仮想線にて示されている如く、電子制御装置34にはCCDカメラ66により撮像された車輌の前方の画像情報を示す信号も入力される。
【0112】
電子制御装置34は上述の実施例1の場合と同様アクセル開度φの変化率φdを演算すると共に、上述の実施例5の場合と同様走行路の湾曲度合として走行路半径Rを演算し、アクセル開度の変化率φd及び走行路半径Rに基づき目標ヨーモーメントMtを増減するための増減係数Keを演算すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs5を演算する。
【0113】
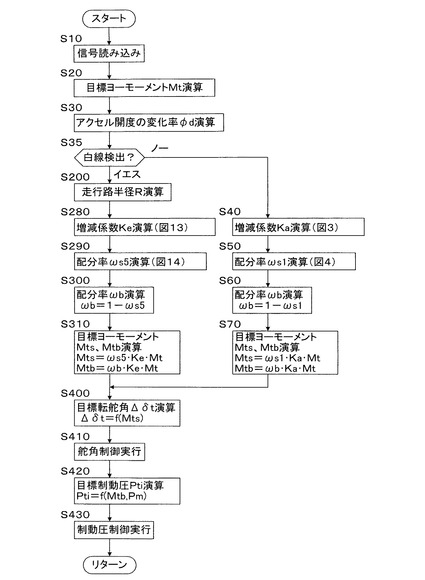
この実施例6に於いては、図7に示されている如く、ステップ10〜70、ステップ200及びステップ400〜430は上述の実施例5の場合と同様に実行され、ステップ200が完了するとステップ280へ進む。
【0114】
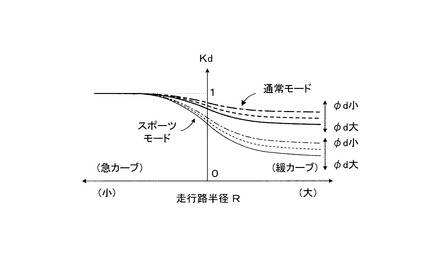
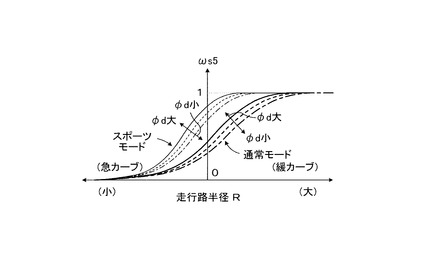
ステップ280に於いてはアクセル開度の変化率φd及び走行路半径Rに基づき図13に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Keが演算され、ステップ290に於いてはアクセル開度の変化率φd及び走行路半径Rに基づき図14に示されたグラフに対応するマップより転舵角制御に対する目標ヨーモーメントの配分率ωs5が演算される。
【0115】
ステップ300に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs5として演算され、ステップ310に於いては増減係数Ke、転舵角制御に対する配分率ωs5、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式13及び14に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs5・Ke・Mt ……(13)
Mtb=ωb・Ke・Mt ……(14)
【0116】
かくして図示の実施例6によれば、ステップ35及び200に於いて走行路の湾曲度合として走行路半径Rが演算され、ステップ280に於いてアクセル開度の変化率φd及び走行路半径Rに基づき目標ヨーモーメントの増減係数Keが演算され、ステップ290に於いてアクセル開度の変化率φd及び走行路半径Rに基づき転舵角制御に対する目標ヨーモーメントの配分率ωs5が演算される。
【0117】
そしてステップ300に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs5として演算され、ステップ310に於いて増減係数Ke、転舵角制御に対する配分率ωs5、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0118】
この場合転舵角制御に対する目標ヨーモーメントの配分率ωs5は、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して大きい値に演算されると共に、アクセル開度φの変化率φdが正の値で大きいほど大きい値に演算されるので、車輌の運転モードがスポーツモードであるか通常モードであるか及び運転者の加速要求に応じて目標ヨーモーメントMtの配分を最適に制御することができる。
【0119】
特に図示の実施例6によれば、目標ヨーモーメントMtに対する増減係数Kdも、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して小さい値に演算されると共に、アクセル開度φの変化率φdが正の値で大きいほど小さい値に演算されるので、車輌の運転モードがスポーツモードであるか通常モードであるか及び運転者の加速要求に応じて車輌に付与されるヨーモーメントの大きさも最適に制御することができる。
【0120】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0121】
例えば上述の各実施例に於いては、車輌の目標旋回制御量としての目標ヨーモーメントMtは目標ヨーレートγtと車輌の実際のヨーレートγとの偏差Δγの大きさを低減して車輌の運動を安定化させるための目標ヨーモーメントとして演算されるようになっているが、目標ヨーモーメントは車輌の走行運動を安定化させるための値である限り、当技術分野に於いて公知の任意の要領にて演算される値であってよい。
【0122】
また上述の実施例4に於いては、上述の実施例1及び2が組み合わされているが、上述の実施例1乃至3、5、6が任意の組合せにて組み合わされてもよい。その場合転舵角制御に対する目標ヨーモーメントMtの配分率ωsは個々の配分率ωs1、ωs2…の積に設定され、目標ヨーモーメントの増減係数は個々の増減係数Ka、Kb…の積に設定される。
【0123】
また上述の実施例5及び6に於いては、走行路の湾曲度合として走行路半径Rが演算され、走行路半径Rに基づき目標ヨーモーメントMtの配分率及び目標ヨーモーメントの増減係数が可変設定されるようになっているが、上述の各実施例に於いて目標ヨーモーメントMtの配分率若しくは目標ヨーモーメントの増減係数が走行路の湾曲度合以外の走行路の状況にも応じて可変設定されるよう修正されてもよい。
【0124】
この場合の走行路の湾曲度合以外の走行路の状況として、例えば下記の表2に示されている如く加減速操作若しくは操舵操作の頻度に基づいて分類された走行路の状況が採用されてよく、目標ヨーモーメントの増減係数は個々の増減係数Ka、Kb…と下記の表2に基づいて設定される増減係数Krとの積に設定される。
【0125】
表2
増減係数Kr
市街地 1.0
高速道路 0.8〜1.0
山岳路 0.8
サーキット 0〜0.2
【0126】
また上述の各実施例に於いては、目標ヨーモーメントMtの配分率に加えて目標ヨーモーメントの増減係数も可変設定され、これにより目標ヨーモーメントMtの大きさが必要に応じて増減補正されるようになっているが、目標ヨーモーメントの増減係数の可変設定は省略されてもよい。
【0127】
更に上述の各実施例に於いては、転舵手段としての転舵角可変装置24はアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転させることにより必要に応じて左右の前輪10FL及び10FRを自動的に転舵するようになっているが、転舵手段は必要に応じて操舵輪を操舵し得る限り、例えばタイロッド20L及び20Rを伸縮させる型式の転舵角可変装置やステアバイワイヤ式の転舵装置の如く当技術分野に於いて公知の任意の構成のものであってよく、転舵手段は補助操舵輪としての後輪を転舵するものであってもよい。
【図面の簡単な説明】
【0128】
【図1】自動転舵装置として機能する転舵角可変装置を備えた車輌に適用された本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【図2】実施例1の走行制御ルーチンを示すフローチャートである。
【図3】実施例2の走行制御ルーチンを示すフローチャートである。
【図4】実施例3の走行制御ルーチンを示すフローチャートである。
【図5】実施例4の走行制御ルーチンを示すフローチャートである。
【図6】実施例5の走行制御ルーチンを示すフローチャートである。
【図7】実施例6の走行制御ルーチンを示すフローチャートである。
【図8】アクセル開度φの変化率φdと目標ヨーモーメントの増減係数Kaとの間の関係を示すグラフである。
【図9】アクセル開度φの変化率φdと転舵角制御に対する配分率ωs1との間の関係を示すグラフである。
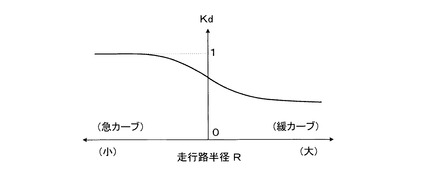
【図10】走行路半径Rと目標ヨーモーメントの増減係数Kdとの間の関係を示すグラフである。
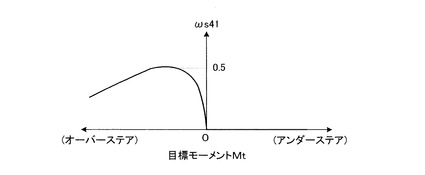
【図11】走行路半径Rと転舵角制御に対する目標ヨーモーメントの配分率ωs41との間の関係を示すグラフである。
【図12】目標ヨーモーメントMtと転舵角制御に対する目標ヨーモーメントの配分率ωs42との間の関係を示すグラフである。
【図13】アクセル開度φの変化率φdと走行路半径Rと目標ヨーモーメントの増減係数Keとの間の関係を示すグラフである。
【図14】アクセル開度φの変化率φdと走行路半径Rと転舵角制御に対する目標ヨーモーメントの配分率ωs5との間の関係を示すグラフである。
【符号の説明】
【0129】
16 パワーステアリング装置
14 ステアリングホイール
24 転舵角可変装置
34 電子制御装置
36 制動装置
44 マスタシリンダ
50 操舵角センサ
52 回転角センサ
54 車速センサ
56 ヨーレートセンサ
58FL〜58RR 圧力センサ
60 圧力センサ
62 アクセル開度センサ
64 切り替えスイッチ
66 CCDカメラ
【技術分野】
【0001】
本発明は、車輌の走行制御装置に係り、更に詳細には操舵輪の舵角及び車輪の制駆動力を制御することにより車輌の走行を制御する走行制御装置に係る。
【背景技術】
【0002】
自動車等の車輌の走行制御装置の一つとして、例えば本願出願人の出願にかかる下記の特許文献1に記載されている如く、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の目標ヨーモーメントの如き目標旋回制御量を演算する手段と、目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、操舵輪の転舵角制御による目標旋回制御量に基づき転舵手段を制御し、制駆動力の制御による目標旋回制御量に基づき制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置が既に知られている。
【0003】
一般に、転舵手段による操舵輪の転舵によれば、車輌の加減速を伴うことなく車輌の走行運動を制御することができるが、制駆動力の制御に比して車輌の走行運動制御の応答性が低く、また車輌のアンダーステア状態に対処することが困難である。これに対し車輪の制駆動力の制御によれば、操舵輪の転舵による走行運動制御の場合に比して応答性よく車輌の走行運動を制御することができるが、車速の増減、即ち加減速を伴うことが避けられない。
【0004】
上述の先の提案にかかる走行制御装置によれば、転舵手段及び制駆動力制御手段の応答性や特徴等に基づく所定の比率にて目標旋回制御量が操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分されるので、操舵輪の転舵角制御又は制駆動力の制御のみにより車輌の走行運動が制御される場合に比して、車輌の走行運動を好ましく効果的に制御することができる。
【特許文献1】特開2003−175749号公報
【発明の開示】
【0005】
〔発明が解決しようとする課題〕
しかし上述の走行制御装置に於いては、所定の比率は目標旋回制御量達成に対する転舵手段及び制駆動力制御手段の応答性や特徴等により決定され、乗員の運転嗜好や運転者の運転意図は考慮されないため、乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分することができない。
【0006】
尚本願出願人は、上述の走行制御装置に於いては走行路の湾曲度合や走行路に於ける横方向位置の如き走行路に対する車輌の走行状況が考慮されない点を改善すべく、出願公開前の特願2000−91509号の特許出願に於いて、走行路に対する車輌の走行状況に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分するよう構成された走行制御装置を提案したが、この先の提案にかかる走行制御装置によっても上述の問題を解消することができない。
【0007】
本発明は、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と各車輪の制駆動力を制御する制駆動力制御手段とを備えた従来の走行制御装置に於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は目標旋回制御量を操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分するに当り乗員の車輌走行嗜好や運転者の運転意図を考慮することにより、乗員の車輌走行嗜好や運転者の運転意図に応じて転舵手段及び制駆動力制御手段に対し目標旋回制御量を適正に配分し、車輌の走行を適正に且つ効果的に制御することである。
〔課題を解決するための手段及び発明の効果〕
【0008】
上述の主要な課題は、本発明によれば、運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者の加速操作量を検出する手段を有し、前記配分手段は前記加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置(請求項1の構成)、又は運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者により操作される切り替え手段であって、運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと前記第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードを切り替える切り替え手段を有し、前記配分手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置(請求項4の構成)、又は運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者を特定する手段を有し、前記配分手段は特定された運転者に応じて前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を可変設定することを特徴とする車輌の走行制御装置(請求項6の構成)によって達成される。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記目標旋回制御量を演算する手段は前記増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項2の構成)。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、前記配分手段は前記加速操作量が増加変化していないときには前記操舵輪の転舵角制御による目標旋回制御量の配分比率を0にするよう構成される(請求項3の構成)。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項4の構成に於いて、前記目標旋回制御量を演算する手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項5の構成)。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3乃至5の構成に於いて、前記目標旋回制御量を演算する手段は運転者の加速操作の変化度合が大きいときには前記変化度合が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項6の構成)。
【0013】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6の構成に於いて、前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されているよう構成される(請求項7の構成)。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項4乃至7の構成に於いて、前記目標旋回制御量を演算する手段は運転者の加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくするよう構成される(請求項8の構成)。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至8の構成に於いて、前記配分手段は前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況を考慮するよう構成される(請求項9の構成)。
【0016】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至9の構成に於いて、前記目標旋回制御量を演算する手段は車輌の目標旋回状態量を演算する手段と、車輌の実際の旋回状態量を検出する手段とを有し、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントを演算するよう構成される(請求項10の構成)。
【0017】
上記請求項1の構成によれば、運転者の加速操作量が検出され、運転者の加速操作量の増加変化率が大きいときには加速操作量の増加変化率が小さいときに比して操舵輪の転舵角制御による目標旋回制御量の配分比率が大きくされるので、運転者の加速要求が高いときには相対的に転舵角制御による目標旋回制御量の配分比率を高くして制動力の制御に起因する車輌の加速性能の悪化を防止しつつ車輌の安定的な走行を実現し、運転者の加速要求が低いときには相対的に制動力の制御による目標旋回制御量の配分比率を高くして車輌の安定化を応答性よく効果的に達成することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量を配分し車輌の走行を適正に且つ効果的に制御することができる。
【0018】
また上記請求項2の構成によれば、運転者の加速操作量の増加変化率が大きいときには加速操作量の増加変化率が小さいときに比して目標旋回制御量の大きさが小さくされるので、運転者の加速要求が高いほど目標旋回制御量の大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0019】
また上記請求項3の構成によれば、運転者の加速操作量が増加変化していないときには操舵輪の転舵角制御による目標旋回制御量の配分比率が0にされるので、運転者の加速操作量が増加変化していないときには目標旋回制御量の全てが制動力の制御による目標旋回制御量に配分され、従って運転者の加速操作量が増加変化していないときにも操舵輪の転舵角制御による目標旋回制御量の配分比率が0よりも大きく1よりも小さい値に設定される場合に比して、制動力の制御による旋回制御量の制御により車輌の走行を応答性よく効果的に安定化させることができる。
【0020】
また上記請求項4の構成によれば、運転者によって切り替え手段が操作されることにより運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードが切り替えられ、切り替え手段が第一の運転モードに切り替えられているときには切り替え手段が第二の運転モードに切り替えられているときに比して操舵輪の転舵角制御による目標旋回制御量の配分比率が大きくされるので、乗員が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて転舵角制御及び制動力の制御に対する目標旋回制御量の配分を制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の配分を制御することができる。
【0021】
また上記請求項5の構成によれば、切り替え手段が前記第一の運転モードに切り替えられているときには切り替え手段が第二の運転モードに切り替えられているときに比して目標旋回制御量の大きさが小さくされるので、乗員が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて目標旋回制御量の大きさを制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の大きさを制御することができる。
【0022】
また上記請求項6の構成によれば、運転者が特定され、特定された運転者に応じて操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率が可変設定されるので、転舵角制御及び制動力の制御に対する目標旋回制御量の配分を確実に運転者毎に最適値に制御することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標旋回制御量の配分を最適に制御することができる。
【0023】
また上記請求項7の構成によれば、操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されているので、複雑な演算等を要することなく転舵角制御及び制動力の制御に対する目標旋回制御量の配分を確実に運転者毎に最適値に制御することができる。
【0024】
また上記請求項8の構成によれば、運転者の加速操作量の変化度合が大きいときには加速操作量の変化度合が小さいときに比して目標旋回制御量の大きさが小さくされるので、上記請求項2の場合と同様、運転者の加速要求が高いほど目標旋回制御量の大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0025】
また上記請求項9の構成によれば、操舵輪の転舵角制御による目標旋回制御量及び制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況が考慮されるので、走行路の状況が考慮されない場合に比して、目標旋回制御量の配分を一層適正に制御することができる。
【0026】
また上記請求項10の構成によれば、車輌の目標旋回状態量が演算され、車輌の実際の旋回状態量が検出され、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントが演算されるので、走行路に対する車輌の走行状況に応じて車輌の目標ヨーモーメントを操舵輪の転舵角制御による目標ヨーモーメントと制駆動力の制御による目標ヨーモーメントとに最適に配分することができる。
〔課題解決手段の好ましい態様〕
【0027】
本発明の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、転舵手段は運転者により操作される操舵操作子に対し相対的に操舵輪を転舵駆動することにより、運転者の操舵操作とは独立に操舵輪を転舵駆動するよう構成される(好ましい態様1)。
【0028】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、制駆動力制御手段は各車輪の制動力を相互に独立に制御する手段を含み、各車輪の制動力を制御することにより各車輪の制駆動力を制御するよう構成される(好ましい態様2)。
【0029】
本発明の他の一つの好ましい態様によれば、上記請求項1の構成に於いて、配分手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくするよう構成される(好ましい態様3)。
【0030】
本発明の他の一つの好ましい態様によれば、上記請求項2の構成に於いて、目標旋回制御量を演算する手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の大きさを小さくするよう構成される(好ましい態様4)。
【0031】
本発明の他の一つの好ましい態様によれば、上記請求項7の構成に於いて、目標旋回制御量を演算する手段は特定された運転者に応じて目標旋回制御量の大きさを増減補正するよう構成される(好ましい態様5)。
【0032】
本発明の他の一つの好ましい態様によれば、上記請求項7の構成に於いて、走行路の状況は走行路の湾曲度合であるよう構成される(好ましい態様6)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項8の構成に於いて、配分手段は加速操作量の増加変化率が大きいほど操舵輪の転舵角制御による目標旋回制御量の大きさを小さくするよう構成される(好ましい態様7)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、配分手段は車輌の目標ヨーモーメントが車輌のドリフトアウト状態を低減するための目標ヨーモーメントであるときには、車輌の目標ヨーモーメントの全てを制駆動力の制御による目標ヨーモーメントに配分するよう構成される(好ましい態様8)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、配分手段は車輌の目標ヨーモーメントが車輌のスピン状態を低減するための目標ヨーモーメントであるときには、車輌の目標ヨーモーメントの大きさが大きいほど制駆動力の制御による目標ヨーモーメントの配分比が高くなるよう、車輌の目標ヨーモーメントに応じて所定の比率を可変設定するよう構成される(好ましい態様9)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至10の構成に於いて、目標旋回制御量を演算する手段は走行路の状況に応じて目標旋回制御量の大きさを増減補正するよう構成される(好ましい態様10)。
【0037】
本発明の他の一つの好ましい態様によれば、上記好ましい態様10の構成に於いて、走行路の状況は加減速操作若しくは操舵操作の頻度に基づいて分類された走行路の状況であるよう構成される(好ましい態様11)。
【発明を実施するための最良の形態】
【0038】
以下に添付の図を参照しつつ、本発明を好ましい実施例について詳細に説明する。
【実施例1】
【0039】
図1は自動転舵装置として機能する転舵角可変装置を備えた車輌に適用された本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【0040】
図1に於いて、10FL及び10FRはそれぞれ車輌12の操舵輪としての左右の前輪を示し、10RL及び10RRはそれぞれ左右の後輪を示している。操舵輪である左右の前輪10FL及び10FRは運転者によるステアリングホイール14の操作に応答して駆動されるラック・アンド・ピニオン型のパワーステアリング装置16によりラックバー18及びタイロッド20L及び20Rを介して転舵される。
【0041】
ステアリングホイール14は第一のステアリングシャフトとしてのアッパステアリングシャフト22、転舵角可変装置24、第二のステアリングシャフトとしてのロアステアリングシャフト26、ユニバーサルジョイント28を介してパワーステアリング装置16のピニオンシャフト30に駆動接続されている。図示の実施例に於いては、転舵角可変装置24はハウジング24Aの側にてアッパステアリングシャフト22の下端に連結され、回転子24Bの側にてロアステアリングシャフト26の上端に連結された補助転舵駆動用の電動機32を含んでいる。
【0042】
かくして転舵角可変装置24はアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転駆動することにより、ステアリングホイール14の回転角度に対する操舵輪である左右の前輪10FL及び10FRの舵角の比、即ちステアリングギヤ比を変化させるステアリングギヤ比可変装置として機能すると共に、挙動制御の目的で左右の前輪10FL及び10FRをステアリングホイール14に対し相対的に補助転舵駆動する自動転舵装置としても機能し、電子制御装置34の転舵制御部により制御される。
【0043】
特に転舵角可変装置24は、通常時にはステアリングギヤ比が所定の操舵特性を達成するギヤ比になるよう電動機32によりアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転させ、挙動制御による補助転舵駆動時には電動機32によりアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を積極的に回転させ、これにより必要に応じて左右の前輪10FL及び10FRを自動的に転舵する。
【0044】
尚アッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転駆動することができない異常が転舵角可変装置24に発生すると、図1には示されていないロック装置が作動し、アッパステアリングシャフト22に対するロアステアリングシャフト26の相対回転角度が変化しないよう、ハウジング24A及び回転子24Bの相対回転が機械的に阻止される。
【0045】
またパワーステアリング装置16は油圧式パワーステアリング装置及び電動式パワーステアリング装置の何れであってもよいが、転舵角可変装置24による前輪の補助転舵駆動により発生されステアリングホイール14に伝達される反力トルクを低減する補助操舵トルクが発生されるよう、例えば電動機と、電動機の回転トルクをラックバー18の往復動方向の力に変換するボールねじ式の如き変換機構とを有するラック同軸型の電動式パワーステアリング装置であることが好ましい。
【0046】
各車輪の制動力は制動装置36の油圧回路38によりホイールシリンダ40FL、40FR、40RL、40RR内の圧力Pi(i=fl、fr、rl、rr)、即ち制動圧が制御されることによって制御されるようになっている。図には示されていないが、油圧回路38はオイルリザーバ、オイルポンプ、種々の弁装置等を含み、各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル42の踏み込み操作に応じて駆動されるマスタシリンダ44により制御され、また必要に応じて後に詳細に説明する如く電子制御装置34により個別に制御される。
【0047】
図示の実施例に於いては、アッパステアリングシャフト22には該アッパステアリングシャフトの回転角度を操舵角θとして検出する操舵角センサ50が設けられており、転舵角可変装置24にはハウジング24A及び回転子24Bの相対回転角度をアッパステアリングシャフト22に対するロアステアリングシャフト26の相対回転角度θreとして検出する回転角度センサ52が設けられており、これらのセンサの出力は電子制御装置34へ供給される。尚操舵角センサ52はロアステアリングシャフト28Bの回転角度θsを検出するセンサに置き換えられ、相対回転角度θreは操舵角の差θs−θとして求められてもよい。
【0048】
また電子制御装置34には車速センサ54により検出された車速Vを示す信号、ヨーレートセンサ56により検出された車輌のヨーレートγを示す信号、圧力センサ58FL〜58RRにより検出された各車輪の制動圧Piを示す信号、圧力センサ60により検出されたマスタシリンダ圧力Pmを示す信号、アクセル開度センサ62よりアクセル開度φを示す信号が入力される。
【0049】
尚図1には詳細に示されていないが、電子制御装置34は転舵角可変装置24を制御する転舵制御部と、各車輪の制動力を制御する制動力制御部と、車輌の挙動を制御する挙動制御部とよりなり、各制御部はそれぞれCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続されたマイクロコンピュータを含むものであってよい。また操舵角センサ50、回転角度センサ52、ヨーレートセンサ56はそれぞれ車輌の左旋回方向への操舵又は転舵又は旋回の場合を正として操舵角θ、相対回転角度θre、ヨーレートγを検出する。
【0050】
後述の如く、電子制御装置34は運転者の操舵操作量を示す操舵角θ、相対回転角度θre、ステアリングギヤ比Rgに基づき左右前輪の実舵角δaを演算し、実舵角δa及び車速Vに基づき車輌の目標ヨーレートγtを演算する。そして電子制御装置34は、目標ヨーレートγtとヨーレートセンサ56により検出された車輌の実際のヨーレートγとの偏差Δγを演算し、ヨーレート偏差Δγに基づき該ヨーレート偏差の大きさを低減して車輌の運動を安定化させるための目標ヨーモーメントMtを車輌の目標旋回制御量として演算する。
【0051】
また電子制御装置34はアクセル開度φの単位時間当たりの変化量(時間微分値)としてアクセル開度φの変化率φdを演算し、アクセル開度φの変化率φdに応じて目標ヨーモーメントMtを増減すると共に、アクセル開度φの変化率φdに応じて転舵角制御に対する目標ヨーモーメントMtの配分率ωs及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算し、配分率ωs及びωbに基づき目標ヨーモーメントMtを転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分する。
【0052】
更に電子制御装置34は目標ヨーモーメントMtsを達成するための左右前輪の目標転舵角Δδtを演算し、左右前輪10FL及び10FRの舵角が実舵角δaと目標転舵角Δδtとの和である目標舵角δtになるよう転舵角可変装置24を制御すると共に、目標ヨーモーメントMtbを達成するための各車輪の目標制動圧Ptiを演算し、各車輪の制動圧Piがそれぞれ対応する目標制動圧Ptiになるよう制御し、これによりヨーレート偏差Δγの大きさを低減して車輌の走行運動を安定化させる。
【0053】
次に図2に示されたフローチャートを参照して図示の実施例に於いて電子制御装置34により達成される左右前輪の舵角制御による車輌の走行制御ルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0054】
まずステップ10に於いては操舵角θsを示す信号等の読み込みが行われ、ステップ20に於いては操舵角θ及びステアリングギヤ比Rgに基づき左右前輪の推定舵角δf(=θ/Rg)が演算されると共に、HをホイールベースとしKhをスタビリティファクタとして、車速V及び推定舵角δfに基づき下記の式1に従って基準ヨーレートγeが演算されると共に、Tを時定数としsをラプラス演算子として、下記の式2に従って車輌の目標ヨーレートγtが演算される。尚基準ヨーレートγeは動的なヨーレートを考慮すべく車輌の横加速度Gyを加味して演算されてもよい。
γe=V・δf/(1+KhV2)H ……(1)
γt=γe/(1+Ts) ……(2)
【0055】
ステップ20に於いては車輌の目標ヨーレートγtと車輌の実際のヨーレートγとの偏差としてヨーレート偏差Δγが演算され、ヨーレート偏差Δγに基づき該ヨーレート偏差の大きさを低減するための目標旋回制御量としての目標ヨーモーメントMtが当技術分野に於いて公知の要領にて演算される。
【0056】
ステップ30に於いてはアクセル開度φの単位時間当たりの変化量としてアクセル開度φの変化率φdが演算され、ステップ40に於いてはアクセル開度φの変化率φdに基づき図8に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Kaが演算される。尚図8に示されている如く、増減係数Kaはアクセル開度φの変化率φdが負の値であるときには1に演算され、アクセル開度φの変化率φdが正の値であるときには変化率φdが大きくなるにつれて漸次小さくなるよう演算される。
【0057】
ステップ50に於いてはアクセル開度φの変化率φdに基づき図9に示されたグラフに対応するマップより転舵角制御に対する配分率ωs1が演算され、ステップ60に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算される。尚図9に示されている如く、配分率ωs1はアクセル開度φの変化率φdが負の値であるときには0に演算され、アクセル開度φの変化率φdが正の値であるときには変化率φdが大きくなるにつれて漸次大きくなるよう演算される。
【0058】
ステップ70に於いては増減係数Ka、転舵角制御に対する配分率ωs1、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式3及び4に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs1・Ka・Mt ……(3)
Mtb=ωb・Ka・Mt ……(4)
【0059】
ステップ400に於いては前輪の目標転舵角Δδtが転舵角制御の目標ヨーモーメントMtsの関数として演算され、ステップ410に於いては左右前輪が目標転舵角Δδt転舵されるよう転舵角可変装置24が制御される。
【0060】
ステップ420に於いては制動力の制御の目標ヨーモーメントMtb及びマスタシリンダ圧力Pmに基づき各車輪の目標制動圧Pti(i=fl、fr、rl、rr)がマスタシリンダ圧力Pmに基づく各車輪の目標制動圧と制動力の制御の目標ヨーモーメントMtbを達成するための各車輪の制動圧の増減量との和として演算され、ステップ430に於いては各車輪の制動圧Piがそれぞれ対応する目標制動圧Ptiになるよう制動装置36が制御される。
【0061】
かくして図示の実施例1によれば、ステップ20に於いて車輌を安定的に走行させるための車輌の目標ヨーモーメントMtが演算され、ステップ30に於いて運転者の加速操作量の増加変化率としてアクセル開度φの変化率φdが演算され、ステップ50に於いてアクセル開度φの変化率φdに基づき変化率φdが正の値で大きくなるにつれて漸次大きくなるよう転舵角制御に対する配分率ωs1が演算され、ステップ60に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され、ステップ70に於いて転舵角制御に対する配分率ωs1、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量としての転舵角制御の目標ヨーモーメントMts及び制動力の制御に対する目標ヨーモーメントMtの配分量としての制動力の制御の目標ヨーモーメントMtbが演算され、ステップ400〜430に於いて転舵角制御によるヨーモーメント及び制動力の制御によるヨーモーメントがそれぞれ目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbになるよう転舵角可変装置24及び制動装置36が制御される。
【0062】
従って運転者の加速操作量の増加変化率に応じて目標ヨーモーメントMtを転舵角制御の目標ヨーモーメントMts及び制動力の制御の目標ヨーモーメントMtbに最適に配分することができるので、運転者の加速要求が高いときには相対的に転舵角制御によるヨーモーメントを高くして制動力の制御に起因する車輌の加速性能の悪化を防止しつつ車輌の安定的な走行を実現し、運転者の加速要求が低いときには相対的に制動力の制御によるヨーモーメントを高くして車輌の安定化を応答性よく効果的に達成することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントを配分することができる。
【0063】
特に図示の実施例1によれば、ステップ40に於いてアクセル開度φの変化率φdが正の値で大きくなるにつれて漸次小さくなるようアクセル開度φの変化率φdに基づき目標ヨーモーメントの増減係数Kaが演算されるので、運転者の加速要求が高いほど車輌に付与すべき目標ヨーモーメントの大きさを小さくし、これにより運転者の加速要求が高いときには乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現し、運転者の加速要求が低いときには車輌の走行運動を効果的に安定化させることができる。
【0064】
また図示の実施例1によれば、転舵角制御に対する配分率ωs1はアクセル開度φの変化率φdが正の値でないときには0に設定され、目標ヨーモーメントMtの全てが制動力の制御による目標ヨーモーメントMtbに配分されるので、アクセル開度φの変化率φdが正の値でないときにも転舵角制御に対する配分率ωs1が0よりも大きく1よりも小さい値に設定される場合に比して、制動力の制御によるヨーモーメントにより車輌の走行を応答性よく効果的に安定化させることができる。
【実施例2】
【0065】
図3は本発明による車輌の走行制御装置の実施例2に於ける走行制御ルーチンを示すフローチャートである。尚図3に於いて図2に示されたステップと同一のステップには図2に於いて付されたステップ番号と同一のステップ番号が付されており、このことは後述の他の実施例についても同様である。
【0066】
この実施例2に於いては、電子制御装置34にはアクセル開度センサ62よりアクセル開度φを示す信号は入力されないが、図1に於いて仮想線にて示されている如く、電子制御装置34には運転者により操作される切り替えスイッチ64により設定された車輌の運転モードがスポーツモードが通常モードであるかを示す信号も入力される。車輌の運転モードがスポーツモードであるときには、車輌の運転モードが通常モードであるときに比して、運転者の運転操作に対する車輌の運動応答が高い。
【0067】
また電子制御装置34は車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて転舵角制御に対する目標ヨーモーメントMtの配分率ωs2及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算し、配分率ωs2及びωbに基づき目標ヨーモーメントMtを転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分する。
【0068】
図3に示されている如く、この実施例2に於いてはステップ10、20及びステップ400〜430は上述の実施例1の場合と同様に実行され、ステップ20が完了するとステップ80へ進む。
【0069】
ステップ80に於いては切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか否かの判別が行われ、肯定判別が行われたときにはステップ90に於いて目標ヨーモーメントの増減係数Kbが0.5に設定されると共に、転舵角制御に対する配分率ωs2が1.0に設定された後ステップ110へ進み、否定判別が行われたときにはステップ100に於いて目標ヨーモーメントの増減係数Kbが1.0に設定されると共に、転舵角制御に対する配分率ωs2が0.5に設定された後ステップ110へ進む。
【0070】
ステップ110に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs2として演算され、ステップ120に於いては増減係数Kb、転舵角制御に対する配分率ωs2、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式5及び6に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs2・Kb・Mt ……(5)
Mtb=ωb・Kb・Mt ……(6)
【0071】
かくして図示の実施例2によれば、ステップ80〜110に於いて切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて増減係数Kb、転舵角制御に対する目標ヨーモーメントMtの配分率ωs2、制動力の制御に対する目標ヨーモーメントMtの配分率ωbが演算され、増減係数Kbに基づき車輌に付与されるべきヨーモーメントが増減されると共に、配分率ωs2及びωbに基づき目標ヨーモーメントMtが転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分される。
【0072】
従って車輌の運転モードがスポーツモードであるときには通常モードであるときに比して転舵角制御に対する目標ヨーモーメントの配分率ωs2が大きい値に演算されるので、運転者が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて車輌に付与されるヨーモーメントの大きさや転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を制御し、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントの配分を適正に制御することができる。
【0073】
特に図示の実施例2によれば、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して増減係数Kbが小さい値に設定されるので、運転者が運転操作に対する車輌の運動応答が高いことを望んでいるか否かに応じて車輌に付与されるヨーモーメントの大きさをも制御することができ、これにより車輌の運転モードがスポーツモードであるか通常モードであるかに応じて目標ヨーモーメントMtの配分のみが可変設定される場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさを適正に制御することができる。
【0074】
また図示の実施例2によれば、転舵角制御に対する目標ヨーモーメントの配分率ωs2は運転モードがスポーツモードであるときには通常モードであるときに比して大きく、増減係数Kbは運転モードがスポーツモードであるときには通常モードであるときに比して小さいので、配分率ωs2及び増減係数Kbの大小関係が逆である場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさを適正に制御することができる。
【実施例3】
【0075】
図4は本発明による車輌の走行制御装置の実施例3に於ける走行制御ルーチンを示すフローチャートである。
【0076】
この実施例3に於いては、図1には示されていないが、運転者が運転者特定ボタンを操作することにより運転者を特定し得るようになっている。また電子制御装置34は例えば下記の表1に示されている如く、運転者と共に運転者の運転嗜好として目標ヨーモーメントMtを増減するための増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3を登録し、登録された運転者を運転者特定ボタンに対応させ得るようになっている。
【0077】
表1
増減係数Kc 配分率ωs3
運転者A 1.0 0.2
運転者B 0.8 0.5
運転者C 0.2 1.0
【0078】
そして電子制御装置34は運転者特定ボタンの操作により運転者が特定されると、特定された運転者に応じて登録されている情報に基づき目標ヨーモーメントMtを増減するための増減係数Kcを設定すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs3を設定する。
【0079】
図4に示されている如く、この実施例3に於いてはステップ10、20及びステップ400〜430は上述の実施例1の場合と同様に実行され、ステップ20が完了するとステップ130へ進む。
【0080】
ステップ130に於いては運転者特定ボタンの操作に基づき運転者が特定され、ステップ140に於いては特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され、ステップ150に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs3として演算される。
【0081】
ステップ160に於いては増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式7及び8に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs3・Kc・Mt ……(7)
Mtb=ωb・Kc・Mt ……(8)
【0082】
かくして図示の実施例3によれば、ステップ130に於いて運転者特定ボタンの操作に基づき運転者が特定され、ステップ140に於いて特定された運転者に対応する増減係数Kc及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs3が設定され、ステップ150に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs3として演算され、ステップ160に於いて増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0083】
従って運転者に応じて増減係数Kc、転舵角制御に対する配分率ωs3、制動力の制御に対する配分率ωbを確実に最適値に設定することによって、車輌に付与されるヨーモーメントの大きさや転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を確実に運転者毎に最適値に制御することができ、これにより乗員の車輌走行嗜好や運転者の運転意図に応じて車輌に付与されるヨーモーメントの大きさやヨーモーメントの配分を最適に制御することができる。
【0084】
特に図示の実施例3によれば、運転者に応じて増減係数Kcも可変設定されることにより、運転者に応じて車輌に付与されるヨーモーメントの大きさも制御することができ、これにより運転者に応じて目標ヨーモーメントMtの配分のみが可変設定される場合に比して、乗員の車輌走行嗜好や運転者の運転意図に応じて一層確実に車輌に付与されるヨーモーメントの大きさや目標ヨーモーメントの配分を制御することができる。
【0085】
また図示の実施例3によれば、配分率ωs3及び増減係数Kcは予め登録されている情報に基づいて設定されるので、複雑な演算等を要することなく特定された運転者に応じて配分率ωs3及び増減係数Kcを設定することができる。
【0086】
尚図示の実施例3に於いては、運転者により運転者特定ボタンが操作されることにより運転者が特定されるようになっているが、運転者を特定する手段は例えば特開平2−173868、特開平2−173869、特開平3−87981、特開平9−147113、特開2001−167274、特開2002−259982の各公開公報に記載されている如く、当技術分野に於いて公知の任意の個人認識手段であってよい。
【実施例4】
【0087】
図5は実施例1及び2の修正例として構成された本発明による車輌の走行制御装置の実施例4に於ける走行制御ルーチンを示すフローチャートである。
【0088】
この実施例4に於いては、図5に示されている如く、ステップ10〜50、ステップ80〜100及びステップ400〜430は上述の実施例1及び2の場合と同様に実行され、ステップ90又は100が完了するとステップ170へ進む。
【0089】
ステップ170に於いては転舵角制御に対する目標ヨーモーメントの配分率ωsがωs1とωs2との積として演算され、ステップ180に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算される。
【0090】
ステップ190に於いては増減係数Ka及びKb、転舵角制御に対する配分率ωs、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式9及び10に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs・Ka・Kb・Mt ……(9)
Mtb=ωb・Ka・Kb・Mt ……(10)
【0091】
かくして図示の実施例4によれば、ステップ40に於いてアクセル開度φの変化率φdが正の値で大きくなるにつれて漸次小さくなるようアクセル開度φの変化率φdに基づき目標ヨーモーメントの増減係数Kaが演算され、ステップ50に於いてアクセル開度φの変化率φdに基づき変化率φdが正の値で大きくなるにつれて漸次大きくなるよう転舵角制御に対する配分率ωs1が演算され、ステップ80〜100に於いて切り替えスイッチ64により設定された車輌の運転モードがスポーツモードであるか通常モードであるか及びアクセル開度φの変化率φdに応じて増減係数Kb及び転舵角制御に対する目標ヨーモーメントMtの配分率ωs2が演算される。
【0092】
そしてステップ170に於いて転舵角制御に対する目標ヨーモーメントの配分率ωsがωs1とωs2との積として演算され、ステップ180に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωsとして演算され、増減係数Ka及びKbに基づき車輌に付与されるべきヨーモーメントが増減されると共に、配分率ωs及びωbに基づき目標ヨーモーメントMtが転舵角制御による目標ヨーモーメントMts及び制動力の制御による目標ヨーモーメントMtbに配分される。
【0093】
従って上述の実施例1及び2の両方の作用効果を達成することができ、乗員の車輌走行嗜好や運転者の運転意図に応じて目標ヨーモーメントの大きさやその配分を実施例1及び2の場合よりも一層最適に制御することができる。
【実施例5】
【0094】
図6は本発明による車輌の走行制御装置の実施例5に於ける走行制御ルーチンを示すフローチャートである。
【0095】
この実施例5に於いては、図1に於いて仮想線にて示されている如く、車輌12にはCCDカメラ66が搭載されており、電子制御装置34にはCCDカメラ66により撮像された車輌の前方の画像情報を示す信号も入力される。
【0096】
電子制御装置34は当技術分野に於いて公知の要領にて車輌の前方の画像情報を解析することにより車輌12が走行する走行路の湾曲度合として走行路半径Rを演算し、走行路半径Rに基づき目標ヨーモーメントMtを増減するための増減係数Kdを演算すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs41を演算する。また電子制御装置34は目標ヨーモーメントMtの符号及び大きさに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42を演算し、配分率ωs41及びωs42に基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs4及び制動力の制御に対する目標ヨーモーメントMtの配分率ωbを演算する。
【0097】
この実施例5に於いては、図6に示されている如く、ステップ10〜30、ステップ40〜70及びステップ400〜430は上述の実施例1及び2の場合と同様に実行され、ステップ30が完了するとステップ35へ進む。
【0098】
ステップ35に於いてはCCDカメラ66により撮像された車輌前方の画像に対し当技術分野に於いて公知の画像解析処理が行われることにより、車輌12が走行する走行路の白線を検出できているか否かの判別が行われ、否定判別が行われたときにはステップ40〜70が実行された後ステップ400へ進み、肯定判別が行われたときにはステップ200へ進む。
【0099】
ステップ200に於いては上記画像解析処理により得られた走行路の情報に基づき、走行路の形状が推定されると共に、推定された走行路の形状に基づき走行路の湾曲度合として走行路半径Rが演算される。
【0100】
ステップ210に於いては走行路半径Rに基づき図3に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Kaが演算され、ステップ220に於いては目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、ステップ230に於いては走行路半径Rに基づき図3に示されたグラフに対応するマップより転舵角制御に対する目標ヨーモーメントの配分率ωs41が演算される。
【0101】
ステップ240に於いてはアクセル開度φの変化率φdが基準値φdo(正の定数)以上であるか否かの判別が行われ、肯定判別が行われたときにはステップ40へ進み、否定判別が行われたときにはステップ250へ進む
【0102】
ステップ250に於いては配分率ωs41とωs42との積として転舵角制御に対する目標ヨーモーメントMtの配分率ωs4が演算され、ステップ260に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs4として演算される。
【0103】
ステップ270に於いては増減係数Kd、転舵角制御に対する配分率ωs4、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式11及び12に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs4・Kd・Mt ……(11)
Mtb=ωb・Kd・Mt ……(12)
【0104】
かくして図示の実施例5によれば、ステップ35及び200に於いて走行路の湾曲度合として走行路半径Rが演算され、ステップ210に於いて走行路のカーブが急であるほど大きくなるよう走行路半径Rに基づき目標ヨーモーメントの増減係数Kaが演算され、ステップ220に於いて目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、ステップ230に於いて走行路のカーブが急であるほど小さくなるよう走行路半径Rに基づき転舵角制御に対する目標ヨーモーメントの配分率ωs41が演算される。
【0105】
そしてステップ240に於いてアクセル開度φの変化率φdが基準値φdo以上ではないと判別されると、ステップ250に於いて配分率ωs41とωs42との積として転舵角制御に対する目標ヨーモーメントMtの配分率ωs4が演算され、ステップ260に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs4として演算され、ステップ270に於いて増減係数Kd、転舵角制御に対する配分率ωs4、制動力の制御に対する配分率ωbに基づき、転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0106】
従って走行路のカーブが急であるほど転舵角制御に対する目標ヨーモーメントの配分が小さくなると共に制動力の制御に対する目標ヨーモーメントの配分が大きくなるので、走行路のカーブの度合に応じて転舵角制御及び制動力の制御に対する目標ヨーモーメントMtの配分を最適に制御することができる。
【0107】
特に図示の実施例5によれば、ステップ210に於いて走行路のカーブが急であるほど大きくなるよう走行路半径Rに基づき目標ヨーモーメントの増減係数Kaが演算されるので、走行路のカーブが急であるほど車輌の走行を安定化させるためのヨーモーメントの大きさを大きくして車輌の走行運動を確実に且つ効果的に安定化させることができる。
【0108】
また図示の実施例5によれば、ステップ220に於いて目標ヨーモーメントMtに基づき転舵角制御に対する目標ヨーモーメントMtの配分率ωs42が演算され、目標ヨーモーメントMtに基づく転舵角制御に対する配分率ωs42は目標ヨーモーメントMtがアンダーステア抑制ヨーモーメントであるときには0に設定されるので、車輌がアンダーステア状態にあり前輪の横力を増大させることができない状況に於いて目標ヨーモーメントMtが不必要に舵角制御の目標ヨーモーメントMtsに配分されることを防止することができ、また目標ヨーモーメントMtに基づく転舵角制御に対する配分率ωs42は目標ヨーモーメントMtがオーバーステア抑制ヨーモーメントであるときには目標ヨーモーメントMtの大きさが大きいほど小さくなるよう設定されるので、オーバーステア状態を抑制する必要性が高いほど制動力の制御に対する目標ヨーモーメントMtの配分量を多くし、車輌のオーバーステア状態を効果的に抑制することができる。
【0109】
また図示の実施例5によれば、ステップ35に於いて走行路の白線が検出されていないと判別された場合や、ステップ240に於いてアクセル開度φの変化率φdが基準値φdo以上であると判別されると、ステップ40〜70が実行されるので、運転者の加速要求が高いときには上述の実施例1の場合と同様、乗員の車輌走行嗜好や運転者の運転意図に応じた車輌運動を実現することができる。
【実施例6】
【0110】
図7は本発明による車輌の走行制御装置の実施例6に於ける走行制御ルーチンを示すフローチャートである。
【0111】
この実施例6に於いては、アクセル開度センサ62よりアクセル開度φを示す信号が入力されると共に、図1に於いて仮想線にて示されている如く、電子制御装置34にはCCDカメラ66により撮像された車輌の前方の画像情報を示す信号も入力される。
【0112】
電子制御装置34は上述の実施例1の場合と同様アクセル開度φの変化率φdを演算すると共に、上述の実施例5の場合と同様走行路の湾曲度合として走行路半径Rを演算し、アクセル開度の変化率φd及び走行路半径Rに基づき目標ヨーモーメントMtを増減するための増減係数Keを演算すると共に、転舵角制御に対する目標ヨーモーメントMtの配分率ωs5を演算する。
【0113】
この実施例6に於いては、図7に示されている如く、ステップ10〜70、ステップ200及びステップ400〜430は上述の実施例5の場合と同様に実行され、ステップ200が完了するとステップ280へ進む。
【0114】
ステップ280に於いてはアクセル開度の変化率φd及び走行路半径Rに基づき図13に示されたグラフに対応するマップより目標ヨーモーメントの増減係数Keが演算され、ステップ290に於いてはアクセル開度の変化率φd及び走行路半径Rに基づき図14に示されたグラフに対応するマップより転舵角制御に対する目標ヨーモーメントの配分率ωs5が演算される。
【0115】
ステップ300に於いては制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs5として演算され、ステップ310に於いては増減係数Ke、転舵角制御に対する配分率ωs5、制動力の制御に対する配分率ωbに基づき、それぞれ下記の式13及び14に従って転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
Mts=ωs5・Ke・Mt ……(13)
Mtb=ωb・Ke・Mt ……(14)
【0116】
かくして図示の実施例6によれば、ステップ35及び200に於いて走行路の湾曲度合として走行路半径Rが演算され、ステップ280に於いてアクセル開度の変化率φd及び走行路半径Rに基づき目標ヨーモーメントの増減係数Keが演算され、ステップ290に於いてアクセル開度の変化率φd及び走行路半径Rに基づき転舵角制御に対する目標ヨーモーメントの配分率ωs5が演算される。
【0117】
そしてステップ300に於いて制動力の制御に対する目標ヨーモーメントの配分率ωbが1−ωs5として演算され、ステップ310に於いて増減係数Ke、転舵角制御に対する配分率ωs5、制動力の制御に対する配分率ωbに基づき転舵角制御に対する目標ヨーモーメントMtの配分量(転舵角制御の目標ヨーモーメント)Mts及び制動力の制御に対する目標ヨーモーメントMtの配分量(制動力の制御の目標ヨーモーメント)Mtbが演算される。
【0118】
この場合転舵角制御に対する目標ヨーモーメントの配分率ωs5は、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して大きい値に演算されると共に、アクセル開度φの変化率φdが正の値で大きいほど大きい値に演算されるので、車輌の運転モードがスポーツモードであるか通常モードであるか及び運転者の加速要求に応じて目標ヨーモーメントMtの配分を最適に制御することができる。
【0119】
特に図示の実施例6によれば、目標ヨーモーメントMtに対する増減係数Kdも、車輌の運転モードがスポーツモードであるときには通常モードであるときに比して小さい値に演算されると共に、アクセル開度φの変化率φdが正の値で大きいほど小さい値に演算されるので、車輌の運転モードがスポーツモードであるか通常モードであるか及び運転者の加速要求に応じて車輌に付与されるヨーモーメントの大きさも最適に制御することができる。
【0120】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0121】
例えば上述の各実施例に於いては、車輌の目標旋回制御量としての目標ヨーモーメントMtは目標ヨーレートγtと車輌の実際のヨーレートγとの偏差Δγの大きさを低減して車輌の運動を安定化させるための目標ヨーモーメントとして演算されるようになっているが、目標ヨーモーメントは車輌の走行運動を安定化させるための値である限り、当技術分野に於いて公知の任意の要領にて演算される値であってよい。
【0122】
また上述の実施例4に於いては、上述の実施例1及び2が組み合わされているが、上述の実施例1乃至3、5、6が任意の組合せにて組み合わされてもよい。その場合転舵角制御に対する目標ヨーモーメントMtの配分率ωsは個々の配分率ωs1、ωs2…の積に設定され、目標ヨーモーメントの増減係数は個々の増減係数Ka、Kb…の積に設定される。
【0123】
また上述の実施例5及び6に於いては、走行路の湾曲度合として走行路半径Rが演算され、走行路半径Rに基づき目標ヨーモーメントMtの配分率及び目標ヨーモーメントの増減係数が可変設定されるようになっているが、上述の各実施例に於いて目標ヨーモーメントMtの配分率若しくは目標ヨーモーメントの増減係数が走行路の湾曲度合以外の走行路の状況にも応じて可変設定されるよう修正されてもよい。
【0124】
この場合の走行路の湾曲度合以外の走行路の状況として、例えば下記の表2に示されている如く加減速操作若しくは操舵操作の頻度に基づいて分類された走行路の状況が採用されてよく、目標ヨーモーメントの増減係数は個々の増減係数Ka、Kb…と下記の表2に基づいて設定される増減係数Krとの積に設定される。
【0125】
表2
増減係数Kr
市街地 1.0
高速道路 0.8〜1.0
山岳路 0.8
サーキット 0〜0.2
【0126】
また上述の各実施例に於いては、目標ヨーモーメントMtの配分率に加えて目標ヨーモーメントの増減係数も可変設定され、これにより目標ヨーモーメントMtの大きさが必要に応じて増減補正されるようになっているが、目標ヨーモーメントの増減係数の可変設定は省略されてもよい。
【0127】
更に上述の各実施例に於いては、転舵手段としての転舵角可変装置24はアッパステアリングシャフト22に対し相対的にロアステアリングシャフト26を回転させることにより必要に応じて左右の前輪10FL及び10FRを自動的に転舵するようになっているが、転舵手段は必要に応じて操舵輪を操舵し得る限り、例えばタイロッド20L及び20Rを伸縮させる型式の転舵角可変装置やステアバイワイヤ式の転舵装置の如く当技術分野に於いて公知の任意の構成のものであってよく、転舵手段は補助操舵輪としての後輪を転舵するものであってもよい。
【図面の簡単な説明】
【0128】
【図1】自動転舵装置として機能する転舵角可変装置を備えた車輌に適用された本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【図2】実施例1の走行制御ルーチンを示すフローチャートである。
【図3】実施例2の走行制御ルーチンを示すフローチャートである。
【図4】実施例3の走行制御ルーチンを示すフローチャートである。
【図5】実施例4の走行制御ルーチンを示すフローチャートである。
【図6】実施例5の走行制御ルーチンを示すフローチャートである。
【図7】実施例6の走行制御ルーチンを示すフローチャートである。
【図8】アクセル開度φの変化率φdと目標ヨーモーメントの増減係数Kaとの間の関係を示すグラフである。
【図9】アクセル開度φの変化率φdと転舵角制御に対する配分率ωs1との間の関係を示すグラフである。
【図10】走行路半径Rと目標ヨーモーメントの増減係数Kdとの間の関係を示すグラフである。
【図11】走行路半径Rと転舵角制御に対する目標ヨーモーメントの配分率ωs41との間の関係を示すグラフである。
【図12】目標ヨーモーメントMtと転舵角制御に対する目標ヨーモーメントの配分率ωs42との間の関係を示すグラフである。
【図13】アクセル開度φの変化率φdと走行路半径Rと目標ヨーモーメントの増減係数Keとの間の関係を示すグラフである。
【図14】アクセル開度φの変化率φdと走行路半径Rと転舵角制御に対する目標ヨーモーメントの配分率ωs5との間の関係を示すグラフである。
【符号の説明】
【0129】
16 パワーステアリング装置
14 ステアリングホイール
24 転舵角可変装置
34 電子制御装置
36 制動装置
44 マスタシリンダ
50 操舵角センサ
52 回転角センサ
54 車速センサ
56 ヨーレートセンサ
58FL〜58RR 圧力センサ
60 圧力センサ
62 アクセル開度センサ
64 切り替えスイッチ
66 CCDカメラ
【特許請求の範囲】
【請求項1】
運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者を特定する手段を有し、前記配分手段は特定された運転者に応じて前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を可変設定することを特徴とする車輌の走行制御装置。
【請求項2】
前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されていることを特徴とする請求項1に記載の車輌の走行制御装置。
【請求項3】
運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者により操作される切り替え手段であって、運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと前記第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードを切り替える切り替え手段を有し、前記配分手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置。
【請求項4】
前記目標旋回制御量を演算する手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記目標旋回制御量の大きさを小さくすることを特徴とする請求項3に記載の車輌の走行制御装置。
【請求項5】
前記目標旋回制御量を演算する手段は運転者の加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくすることを特徴とする請求項1乃至4の何れか一つに記載の車輌の走行制御装置。
【請求項6】
前記配分手段は前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況を考慮することを特徴とする請求項1乃至5の何れか一つに記載の車輌の走行制御装置。
【請求項7】
前記目標旋回制御量を演算する手段は車輌の目標旋回状態量を演算する手段と、車輌の実際の旋回状態量を検出する手段とを有し、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントを演算することを特徴とする請求項1乃至6の何れか一つに記載の車輌の走行制御装置。
【請求項1】
運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者を特定する手段を有し、前記配分手段は特定された運転者に応じて前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を可変設定することを特徴とする車輌の走行制御装置。
【請求項2】
前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率は運転者毎に予め決定されていることを特徴とする請求項1に記載の車輌の走行制御装置。
【請求項3】
運転者の操舵操作とは独立に操舵輪を転舵可能な転舵手段と、各車輪の制駆動力を制御する制駆動力制御手段と、車輌の運動を安定化させるための車輌の目標旋回制御量を演算する手段と、前記目標旋回制御量を所定の比率にて操舵輪の転舵角制御による目標旋回制御量と制駆動力の制御による目標旋回制御量とに配分する配分手段と、前記操舵輪の転舵角制御による目標旋回制御量に基づき前記転舵手段を制御し、前記制駆動力の制御による目標旋回制御量に基づき前記制駆動力制御手段を制御する制御手段とを有する車輌の走行制御装置に於いて、運転者により操作される切り替え手段であって、運転者の運転操作に対する車輌の運動応答が高い第一の運転モードと前記第一の運転モードに比して前記運動応答が低い第二の運転モードとの間にて運転モードを切り替える切り替え手段を有し、前記配分手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記操舵輪の転舵角制御による目標旋回制御量の配分比率を大きくすることを特徴とする車輌の走行制御装置。
【請求項4】
前記目標旋回制御量を演算する手段は前記切り替え手段が前記第一の運転モードに切り替えられているときには前記切り替え手段が前記第二の運転モードに切り替えられているときに比して前記目標旋回制御量の大きさを小さくすることを特徴とする請求項3に記載の車輌の走行制御装置。
【請求項5】
前記目標旋回制御量を演算する手段は運転者の加速操作量の増加変化率が大きいときには前記増加変化率が小さいときに比して前記目標旋回制御量の大きさを小さくすることを特徴とする請求項1乃至4の何れか一つに記載の車輌の走行制御装置。
【請求項6】
前記配分手段は前記操舵輪の転舵角制御による目標旋回制御量及び前記制駆動力の制御による目標旋回制御量の配分比率を制御するに当り走行路の状況を考慮することを特徴とする請求項1乃至5の何れか一つに記載の車輌の走行制御装置。
【請求項7】
前記目標旋回制御量を演算する手段は車輌の目標旋回状態量を演算する手段と、車輌の実際の旋回状態量を検出する手段とを有し、目標旋回状態量と実際の旋回状態量との偏差に基づき目標旋回制御量として車輌の目標ヨーモーメントを演算することを特徴とする請求項1乃至6の何れか一つに記載の車輌の走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−1275(P2009−1275A)
【公開日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願番号】特願2008−205517(P2008−205517)
【出願日】平成20年8月8日(2008.8.8)
【分割の表示】特願2005−144959(P2005−144959)の分割
【原出願日】平成17年5月18日(2005.5.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年1月8日(2009.1.8)
【国際特許分類】
【出願日】平成20年8月8日(2008.8.8)
【分割の表示】特願2005−144959(P2005−144959)の分割
【原出願日】平成17年5月18日(2005.5.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]