
車輌用走行制御装置
【課題】追従走行制御に於いて、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止する。
【解決手段】先行車輌が停止していない場合(S100)及び先行車輌が停止していても自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには(S140)、車間距離制御が実行され、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御されるが(S170)、予測時間Taが基準値Tao以下になると運転者に対し制駆動操作を催促する報知が発せられた状態で車間距離制御が実行され(S150、170)、運転者は自らの判断により制駆動操作を行うことにより自車を所望の位置に停止させることができ(S20、210)、自車が停止不可区域にて停止する虞れがあるときにも報知が発せられる(S80、150)。
【解決手段】先行車輌が停止していない場合(S100)及び先行車輌が停止していても自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには(S140)、車間距離制御が実行され、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御されるが(S170)、予測時間Taが基準値Tao以下になると運転者に対し制駆動操作を催促する報知が発せられた状態で車間距離制御が実行され(S150、170)、運転者は自らの判断により制駆動操作を行うことにより自車を所望の位置に停止させることができ(S20、210)、自車が停止不可区域にて停止する虞れがあるときにも報知が発せられる(S80、150)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輌用走行制御装置に係り、更に詳細には先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に係る。
【背景技術】
【0002】
自動車等の車輌用走行制御装置の一つとして、例えば下記の特許文献1に記載されている如く、運転者が先行車輌に追従して走行することを希望し追従制御開始スイッチがオン状態にされているときには、先行車輌が走行中の場合には先行車輌に対し所定の車間距離を確保しながら先行車輌に追従するよう自車の車速を制御し、また先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させる車輌用走行制御装置が既に知られている。
【特許文献1】特開2002−67733号公報
【特許文献2】特開平6−1222号公報
【特許文献3】特開平7−108850号公報
【特許文献4】特開平9−249102号公報
【特許文献5】特開平11−250399号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述の如き車輌用走行制御装置によれば、先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させることができる。しかし上述の如き車輌用走行制御装置に於いては、先行車輌の停止に伴い自車を停止させる際の停止位置は先行車輌の位置により決定され、自車の停止位置の状況や運転者の意思が考慮されないため、自車が例えば交差点の如き停止不可区域に停止したり、運転者の意思に沿わない位置に於いて停止したりする場合があるという問題がある。
【0004】
尚上記特許文献2には、停止線などの停止位置を認識し、自車速・路面状況・先行車輌との車間距離から最適な制動開始距離を演算し、運転者に警報を発しても制動操作がないときには自動で制動制御を行う走行制御装置が記載されており、上記特許文献3には、自動制動で停車した後に、所定時間自動制動した状態を保持し、運転者に左右確認などの注意を促す警報を行い、所定時間経過後に制動を解除する走行制御装置が記載されている。
【0005】
また上記特許文献4には、自車の速度と加速度から計算した停止予測時間が予め設定された所定時間以下のときにはブレーキ圧を減圧する走行制御装置が記載されており、上記特許文献5には、信号が黄色になるまでの時間、車速、距離に基づき車輌が交差点を通過できるか否かを予測し、運転者に報知する走行制御装置が記載されている。
【0006】
本発明は、先行車輌が走行中の場合には先行車輌に対し所定の車間距離を確保しながら先行車輌に追従するよう自車の車速を制御し、先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させるよう構成された従来の走行制御装置に於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は、先行車輌の停止に伴い自動制動制御により自車を停止させる際に自車の停止位置の状況や運転者の意思を考慮することにより、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に於いて停止したりすることを防止することである。
【課題を解決するための手段】
【0007】
上述の主要な課題は、本発明によれば、先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知を行うことを特徴とする車輌用走行制御装置(請求項1の構成)、又は先行車輌と自車との相対関係に基づき上限車速以下の範囲内にて自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには自車が停止不可区域に於いて停止する虞れがないと判定したときに比して前記上限車速を低く設定することを特徴とする車輌用走行制御装置(請求項11の構成)によって達成される。
【0008】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離を推定するよう構成される(請求項2の構成)。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、先行車輌が停止しているか否かを判定し、先行車輌が停止していると判定される場合に前記報知を行うよう構成される(請求項3の構成)。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3の構成に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには先行車輌が停止しているか否かに関係なく前記報知を行うよう構成される(請求項4の構成)。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至4の構成に於いて、自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには前記報知を行わないよう構成される(請求項5の構成)。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至5の構成に於いて、前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときには前記走行の自動制御を終了するよう構成される(請求項6の構成)。
【0013】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6の構成に於いて、先行車輌が停止しているか否かを判定し、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに前記走行の自動制御を終了するよう構成される(請求項7の構成)。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6又は7の構成に於いて、前記走行の自動制御を終了するに先立って前記走行の自動制御が終了する旨の警報を運転者に対し行うよう構成される(請求項8の構成)。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項8の構成に於いて、自車の停止時間が第一の所定の時間以上になったときには前記警報を開始し、しかる後自車の停止時間が第二の所定の時間になったときに前記走行の自動制御を終了するよう構成される(請求項9の構成)。
【0016】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項8又は9の構成に於いて、運転者により加速操作又は減速操作が行われるまで前記警報を継続するよう構成される(請求項10の構成)。
【0017】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項11の構成に於いて、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて自車の車速が前記上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うよう構成される(請求項12の構成)。
【0018】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項11の構成に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うよう構成される(請求項13の構成)。
【発明の効果】
【0019】
上記請求項1の構成によれば、自車が停止するまでの走行時間若しくは走行距離が推定され、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知が行われるので、運転者は走行の自動制御により自車が停止される虞れが高い状況を認識し、これにより走行の自動制御による停止位置に自車を停止させるか、自らの制駆動操作により走行の自動制御による停止位置以外の位置に自車を停止させるかを選択することができ、従って自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止することができる。
【0020】
また上記請求項2の構成によれば、自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離が推定されるので、先行車輌との相対距離の情報を必要とすることなく前記走行時間若しくは前記走行距離を推定することができ、また先行車輌との相対距離及び自車の車速に基づいて走行時間若しくは走行距離が推定される場合に比して、自車が停止するまでの走行時間若しくは走行距離を正確に推定することができる。
【0021】
また上記請求項3の構成によれば、先行車輌が停止しているか否かが判定され、先行車輌が停止していると判定される場合に前記報知が行われるので、先行車輌が停止しておらず、自車が停止する虞れが低い状況に於いて不必要な報知が行われることを防止すると共に、先行車輌が停止しており、自車が停止する虞れが高い状況に於いて必要な報知を確実に運転者に発することができる。
【0022】
また上記請求項4の構成によれば、自車が停止不可区域に於いて停止する虞れがあるか否かが判定され、自車が停止不可区域に於いて停止する虞れがあると判定されたときには先行車輌が停止しているか否かに関係なく前記報知が行われるので、自車が停止不可区域に於いて停止する虞れを確実に低減することができる。
【0023】
また上記請求項5の構成によれば、自車が自動車専用道路を走行中であるか否かが判定され、自車が自動車専用道路を走行中であると判定されたときには前記報知が行われないので、自車が自動車専用道路を走行し自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりする虞れが非常に低い状況に於いて、不要な報知が行われること及びこれに起因して乗員が煩わしさを感じることを確実に防止することができる。
【0024】
また上記請求項6の構成によれば、前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときに走行の自動制御が終了されるので、運転者は報知が行われている状況にて自車が停止することにより、いずれ走行の自動制御が終了することを確実に認識することができ、また走行の自動制御が終了する際に制動操作によりその停止状態を維持するか制駆動操作により他の位置へ自車を移動させるかを判断し行動することができる。
【0025】
また上記請求項7の構成によれば、先行車輌が停止しているか否かが判定され、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに走行の自動制御が終了されるので、先行車輌が停止していない状況にて自車が停止した場合に走行の自動制御が無駄に終了されることを確実に防止することができる。
【0026】
また上記請求項8の構成によれば、走行の自動制御を終了するに先立って走行の自動制御が終了する旨の警報が運転者に対し行われるので、運転者は走行の自動制御が終了する前に走行の自動制御が終了する状況であることを確実に認識することができる。
【0027】
また上記請求項9の構成によれば、自車の停止時間が第一の所定の時間以上になったときには警報が開始し、しかる後自車の停止時間が第二の所定の時間になったときに走行の自動制御が終了されるので、運転者は現在の停止位置を維持するか否かを余裕をもって判断することができる。
【0028】
また上記請求項10の構成によれば、運転者により加速操作又は減速操作が行われるまで警報が継続されるので、運転者は走行の自動制御が終了する状況に於いて確実に加速操作又は減速操作を行うことができる。
【0029】
また上記請求項11の構成によれば、自車が停止不可区域に於いて停止する虞れがあるか否かが判定され、自車が停止不可区域に於いて停止する虞れがあると判定されたときには自車が停止不可区域に於いて停止する虞れがないと判定されたときに比して走行の自動制御に於ける上限車速が低く設定されるので、運転者は軽い制動操作により停止不可区域の手前に於いて自車を停止させることができる。
【0030】
また上記請求項12の構成によれば、自車が停止不可区域に於いて停止する虞れがあると判定された状況に於いて自車の車速が上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知が行われるので、自車が停止不可区域に於いて停止する虞れが高い状況に於いて運転者に対し確実に制駆動操作を催促することができる。
【0031】
また上記請求項13の構成によれば、自車が停止するまでの走行時間若しくは走行距離が推定され、自車が停止不可区域に於いて停止する虞れがあると判定された状況に於いて自車が停止するまでの走行時間若しくは走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知が行われるので、上記請求項12の構成の場合と同様、自車が停止不可区域に於いて停止する虞れが高い状況に於いて運転者に対し確実に制駆動操作を催促することができる。
【0032】
[課題解決手段の好ましい態様]
本発明の一つの好ましい態様によれば、上記請求項1乃至13の構成に於いて、先行車輌との車間距離が目標車間距離になるよう自車の車速若しくは加速度を自動制御することによって自車の走行を自動制御するよう構成される(好ましい態様1)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至13又は上記好ましい態様1の構成に於いて、先行車輌が停止し先行車輌との車間距離が基準値以下になったときに自車を停止させるよう構成される(好ましい態様1)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項3の構成に於いて、先行車輌との相対速度及び自車の車速を検出し、相対速度及び自車の車速が実質的に同一であるときに先行車輌が停止していると判定するよう構成される(好ましい態様2)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項4又は請求項11乃至13の構成に於いて、ナビゲーション装置若しくは走行路に設置された走行路情報提供装置より無線式に供給される情報に基づいて自車が停止不可区域に於いて停止する虞れがあるか否かを判定するよう構成される(好ましい態様3)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項11の構成に於いて、自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには自車が停止不可区域に於いて停止する虞れがあるか否かの判定を行わないよう構成される(好ましい態様4)。
【発明を実施するための最良の形態】
【0037】
以下に添付の図を参照しつつ、本発明を好ましい実施例について詳細に説明する。
【実施例1】
【0038】
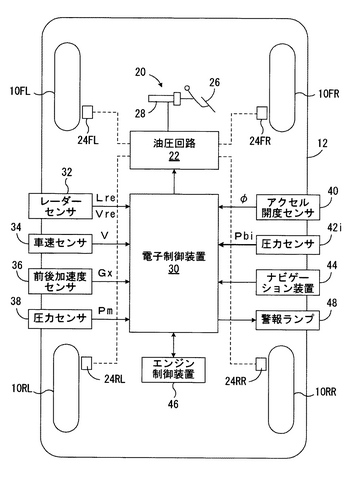
図1は本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【0039】
図1に於いて、10FL及び10FRはそれぞれ車輌12の左右の前輪を示し、10RL及び10RRはそれぞれ駆動輪である左右の後輪を示している。従動輪であり操舵輪でもある左右の前輪10FL及び10FRは図1には示されていないが運転者によるステアリングホイールの転舵に応答して駆動されるラック・アンド・ピニオン式のパワーステアリング装置によりタイロッドを介して操舵される。
【0040】
各車輪の制動力は制動装置20の油圧回路22によりホイールシリンダ24FR、24FL、24RR、24RLの制動圧が制御されることによって制御されるようになっている。図には示されていないが、油圧回路22はリザーバ、オイルポンプ、種々の弁装置等を含み、各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル26の踏み込み操作に応じて駆動されるマスタシリンダ28により制御され、また必要に応じて後に詳細に説明する如く電子制御装置30により制御される。
【0041】
車輌12には例えばミリ波の如き電波やレーザ光を利用して先行車輌を検出すると共に自車に対する先行車輌の相対距離Lre及び相対速度Vreを検出するレーダーセンサ32が設けられている。また車輌12には車速Vを検出する車速センサ34、車輌の前後加速度Gxを検出する前後加速度センサ36、マスタシリンダ圧力Pmを検出する圧力センサ38、運転者によるアクセルペダルの踏込量をアクセル開度φとして検出するアクセル開度センサ40が設けられている。更に各ホイールシリンダ24FR〜24RLにはその圧力Pbi(i=fl、fr、rl、rr)を各車輪の制動圧として検出する圧力センサ42i(i=fl、fr、rl、rr)が設けられている。尚自車に対する先行車輌の相対速度Vreは、先行車輌及び自車の車速をそれぞれVf、Vsとすると、Vf−Vsである。
【0042】
図示の如く、レーダーセンサ32により検出された相対距離Lre及び相対速度Vreを示す信号、車速センサ34により検出された車速Vを示す信号、前後加速度センサ36により検出された車輌の前後加速度Gxを示す信号、圧力センサ38により検出されたマスタシリンダ圧力Pmを示す信号、アクセル開度センサ40により検出されたアクセル開度φを示す信号、圧力センサ42iにより検出された各車輪の制動圧Pbiを示す信号は電子制御装置30へ入力される。
【0043】
また電子制御装置30にはナビゲーション装置44より自車の走行位置等に関する情報及びエンジン制御装置46よりアクセル開度φを示す信号が入力され、電子制御装置30は必要に応じて警報ランプ48を点灯又は点滅させる指令信号を出力し、エンジン制御装置46に対しエンジンの出力に関する指令信号を出力する。エンジン制御装置46は電子制御装置30より指令信号が出力されていない通常時にはアクセル開度φ等に基づき図には示されていないエンジンの出力を制御し、電子制御装置30より指令信号が出力されているときには該指令信号に基づいてエンジンの出力を制御する。
【0044】
尚図1には詳細に示されていないが、電子制御装置30は例えばCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続された一般的な構成のマイクロコンピュータ及び駆動回路を含んでいる。
【0045】
電子制御装置30は、図2に示されたフローチャートに従い、先行車輌及び自車が走行しているときには、レーダーセンサ34によりに検出された相対距離Lre及び相対速度Vreに基づき、相対距離Lreが目標車間距離Ltとは異なるときには相対距離Lreが目標車間距離Ltになるよう制動装置20又はエンジン制御装置46に対し指令信号を出力して車速V又は前後加速度Gxを制御し、相対距離Lreが実質的に目標車間距離Ltであるときには相対速度Vreが実質的に0になるよう制動装置20又はエンジン制御装置46に対し指令信号を出力して車速V又は前後加速度Gxを制御する車間距離制御を行う。
【0046】
また電子制御装置30は、先行車輌が停止し自車も停止する虞れがあるときには、車速V及び前後加速度Gxに基づき自車が停止するまでの予測時間Taを演算し、予測時間Taが基準値Tao以下であるときには、警報ランプ48を点灯することにより運転者に制駆動操作を催促する報知を行うと共に、車間距離制御を行う。
【0047】
また電子制御装置30は、ナビゲーション装置44よりの情報に基づき自車が走行している区域が車輌の停止不可区域又はその前方であるか否かを判定し、自車が走行している区域が車輌の停止不可区域又はその手前であるときには車間距離制御に於ける最大許容速度Vmaxを微低速走行制限値Vmaxoに制限する。また電子制御装置30は、自車が走行している区域が車輌の停止不可区域又はその手前である場合に於いて、自車の車速Vが非常に低い場合又は自車が停止するまでの予測時間Taが基準値Tao以下であるときには、警報ランプ48を点灯することにより運転者に制駆動操作を催促する報知を行うと共に、車間距離制御を行う。
【0048】
また電子制御装置30は、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、停止時間Tsが第一の基準値Ts1以上になると、警報ランプ48を点滅させることにより運転者に車間距離制御が終了する虞れが高いことを示す警報を発すると共に、車間距離制御を行う。
【0049】
更に電子制御装置30は、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、運転者により制動操作が行われることなく停止時間Tsが第二の基準値Ts2以上になると、車間距離制御を中止し、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、運転者により制動操作が行われると、停止時間Tsが第二の基準値Ts2未満であっても車間距離制御を中止する。
【0050】
尚電子制御装置30は、車間距離制御を行っている状況に於いて運転者により制駆動制御が行われると車間距離制御を中止し、特に運転者に制駆動操作を催促する報知又は車間距離制御が終了する虞れが高いことを示す警報を発しつつ車間距離制御を行っている状況に於いて運転者により制駆動制御が行われると、車間距離制御を中止すると共に、報知又は警報を中止する。
【0051】
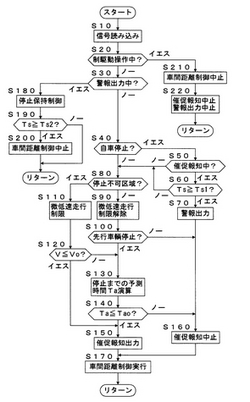
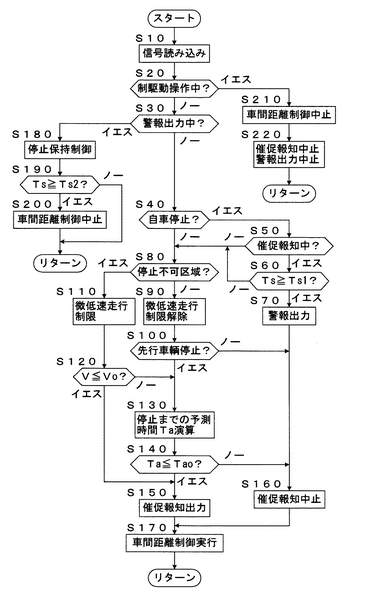
次に図2に示されたフローチャートを参照して図示の実施例1に於ける車輌の走行制御ルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、イグニッションスイッチが開成されるまで所定の時間毎に繰返し実行される。
【0052】
まずステップ10に於いてはレーダーセンサ32により検出された相対距離Lre及び相対速度Vreを示す信号等の読み込みが行われ、ステップ20に於いてはマスタシリンダ圧力Pm又はアクセル開度φに基づき運転者により制駆動操作が行われているか否かの判別が行われ、肯定判別が行われたときにはステップ210へ進み、否定判別が行われたときにはステップ30へ進む。
【0053】
ステップ30に於いては車間距離制御が終了する虞れが高いことを示す警報が出力されているか否かの判別、即ち警報ランプ48が点滅中であるか否かの判別が行われ、肯定判別が行われたときにはステップ180へ進み、否定判別が行われたときにはステップ40へ進む。
【0054】
ステップ40に於いては例えば車速Vに基づき自車が停止状態にあるか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ50へ進む。
【0055】
ステップ50に於いては運転者に対し制駆動操作を催促する報知が出力されているか否かの判別、即ち警報ランプ48が点灯されているか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ60へ進む。
【0056】
ステップ60に於いては自車が停止した時点よりの経過時間、即ち自車の停止時間Tsが基準値Ts1(正の定数)以上であるか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ70に於いて警報ランプ48が点滅されることにより運転者に対し車間距離制御が終了する虞れが高いことを示す警報の出力が開始又は継続される。
【0057】
ステップ80に於いてはナビゲーション装置44よりの情報に基づき自車の前方が車輌の停止不可区域であり、自車が車輌の停止不可区域に於いて停止する可能性があるか否かの判別が行われ、否定判別が行われたときにはステップ110へ進み、肯定判別が行われたときにはステップ90に於いて車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに制限されているときにはその速度制限が解除される。
【0058】
ステップ100に於いては例えば相対速度Vreと自車の車速Vとが実質的に同一であるか否かの判別により、先行車輌が停止した状態にあるか否かの判別が行われ、肯定判別が行われたときにはステップ130へ進み、否定判別が行われたときにはステップ160へ進む。
【0059】
ステップ110に於いては車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定され、ステップ120に於いては自車の車速Vが基準値Vo(正の定数)以下であるか否かの判別が行われ、肯定判別が行われたときにはステップ150へ進み、否定判別が行われたときにはステップ130に於いて例えば自車の車速V又は前後加速度Gx(減速度)に基づき自車が停止するまでの予測時間Taが演算される。
【0060】
尚基準値Voは先行車輌が停止する可能性が高いことを判定するための値として最高許容速度Vmaxよりも小さい値に設定される。また自車が停止するまでの予測時間Taの演算に使用される減速度は車間距離制御の目標減速度であってもよい。
【0061】
ステップ140に於いては自車が停止するまでの予測時間Taが基準値Tao(正の定数)以下であるか否かの判別が行われ、肯定判別が行われたときにはステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持され、否定判別が行われたときにはステップ160に於いて警報ランプ48が点灯されているときには警報ランプ48が消灯されることにより運転者に対する制動操作の催促の報知が中止され、警報ランプ48が点灯されていないときにはその状態が維持される。尚基準値Taoは運転者が余裕をもって制動操作を行うことができる時間に設定される。
【0062】
ステップ170に於いては車速Vが高いほど目標車間距離Ltが短くなるよう、車速Vに基づき図には示されていないマップより先行車輌と自車との間の目標車間距離Ltが演算されると共に、車間距離Lreが目標車間距離Ltになるよう制動装置20又はエンジン制御装置46に対しそれぞれ各車輪の制動力又はエンジンの出力を制御する指令信号が出力され、これにより車間距離制御が実行される。
【0063】
尚上述のステップ110に於いて自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定されているときには、自車の車速Vが微低速走行制限値Vmaxoを越えないよう各車輪の制動力又はエンジンの出力が制御される。
【0064】
ステップ180に於いては各車輪の制動力が自車を停止状態に保持するに必要な制動力にするための指令信号が制動装置20に対し出力され、ステップ190に於いては自車の停止時間Tsが第二の基準値Ts2(第一の基準値Ts1よりも大きい正の定数)以上であるか否かの判別が行われ、否定判別が行われたときにはそのまま図2に示されたルーチンによる制御が一旦終了され、肯定判別が行われたときにはステップ200に於いて車間距離制御が中止された後図2に示されたルーチンによる制御が一旦終了される。
【0065】
ステップ210に於いては車間距離制御が中止され、ステップ220に於いては警報ランプ48が消灯されることにより、運転者に対し制駆動操作を催促する報知が出力されているときには該報知が中止され、運転者に対し車間距離制御が終了する虞れが高いことを示す警報が出力されているときには該警報が中止され、しかる後図2に示されたルーチンによる制御が一旦終了される。
【0066】
次に車輌の種々の走行状態について、上述の如く構成された図示の実施例1の走行制御装置の作動を説明する。
【0067】
(1)先行車輌及び自車が停止不可区域ではない走行路を走行している場合
この場合にはステップ20〜40、80、100に於いて否定判別が行われ、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。従って自車は運転者の制駆動操作を要することなく先行車輌との間に目標車間距離Ltの車間をとって自動的に先行車輌に追従走行する。
【0068】
尚目標車間距離Ltは車速Vが高いほど短くなるよう車速Vに応じて可変設定されるので、車速Vが高いほど車間距離Lreが大きくなるよう制御される。また運転者により制駆動操作が行われると、ステップ20に於いて肯定判別が行われ、ステップ210に於いて車間距離制御が中止されるので、運転者は自らの意思に基づいて自車を加減速運転することができる。
【0069】
(2)停止不可区域ではない走行路を走行中に先行車輌が停止した場合
この場合にはステップ20〜40、80に於いて否定判別が行われるが、ステップ100に於いて肯定判別が行われ、ステップ130に於いて自車が停止するまでの予測時間Taが演算される。予測時間Taが基準値Taoよりも大きいときには、ステップ140に於いて否定判別が行われ、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。
【0070】
これに対し予測時間Taが基準値Tao以下であるときには、ステップ140に於いて肯定判別が行われ、ステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持され、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。
【0071】
従って運転者は先行車輌の停止に伴って自車が停止する可能性が高いことを認識することができ、自動制動により自車を停止させるか、自己の制駆動操作により自動制動による停止位置よりも手前又は先で停止するかを選択することができる。
【0072】
尚運転者が自動制動により自車を停止させることを選択し制駆動操作を行わなかった場合には、自車は先行車輌との車間が減少するにつれて自動制動により車速が漸次低下し、先行車輌との車間が目標車間距離Ltになった段階で自動的に停止する。これに対し運転者が自己の制駆動操作により自動制動による停止位置よりも手前又は先で停止することを選択し制駆動操作を行った場合には、ステップ20に於いて肯定判別が行われ、ステップ210に於いては車間距離制御が中止されるので、運転者は希望する停止位置に自車を停止させることができる。
【0073】
また自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには、ステップ140に於いて否定判別が行われ、ステップ160に於いて警報ランプ48が点灯されているときには警報ランプ48が消灯されることにより運転者に対する制動操作の催促の報知が中止され、警報ランプ48が点灯されていないときにはその状態が維持されるので、先行車輌が停止しても自車が停止する可能性が低い状況に於いて運転者に対し不必要な制動操作の催促の報知が行われること及びこれに起因して運転者が煩わしさを感じることを確実に防止することができる。
【0074】
(3)停止不可区域ではない走行路を走行中に先行車輌が停止し自車も停止した場合
この場合にはステップ20及び30に於いて否定判別が行われるが、ステップ40及び50に於いて肯定判別が行われ、自車の停止時間Tsが第一の基準値Ts1未満であるときには、ステップ60及び80に於いて否定判別が行われ、ステップ100及び140に於いて肯定判別が行われ、これによりステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持されると共に、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに維持される。
【0075】
また自車の停止時間Tsが第一の基準値Ts1以上になると、ステップ60に於いて肯定判別が行われ、ステップ70及び160に於いて警報ランプ48が点滅されることにより制駆動操作を催促する報知の出力が中止されると共に運転者に対し車間距離制御が終了する虞れが高いことを示す警報の出力が開始又は継続される。そしてステップ20に於いて否定判別が行われると共にステップ30に於いて肯定判別が行われ、自車の停止開始時点より第二の基準値Ts2の時間が経過するまで自動制動により自車が停止状態に保持され、自車の停止時間Tsが第二の基準値Ts2以上になると、ステップ190に於いて肯定判別が行われ、ステップ200に於いて車間距離制御が中止されることにより各車輪に対する制動力が解除され、自車はクリープにより前進する。
【0076】
従って運転者は制駆動操作を催促する報知より車間距離制御が終了する虞れが高いことを示す警報へ変化することにより車間距離制御が終了する虞れが高いことを確実に識認することができ、自車の停止開始時点より第一の基準値Ts1の時間が経過した後第二の基準値Ts2の時間が経過するまでの間に余裕をもって現在の停止位置を維持するか否かを判断することができ、現在の停止位置を維持すると判断したときには自車を停止状態に維持するに足る制動操作を行って継続すればよく、現在の停止位置よりも前方へ自車を移動させたいと判断したときには一旦制駆動操作を行った後自車が所望の位置まで移動した段階で自車を停止させるに足る制動操作を行って継続すればよい。
【0077】
かくして先行車輌が停止し自車も停止した場合には、運転者は周囲の状況に鑑みて現在の停止位置を維持するか否かを余裕をもって判断することができ、現在の停止位置よりも前方へ自車を移動させたいと判断したときには制駆動操作を行うだけで自車を所望の位置へ移動し停止させることができる。また制駆動操作を催促する報知より車間距離制御が終了する虞れが高いことを示す警報へ変化すると、運転者が制駆動操作をしない限り報知より警報への変化の時点よりTs2‐Ts1の時間が経過した段階で車間距離制御が終了することを認識することができるので、運転者が車間距離制御が終了するのか継続するのかの判断に迷うことを効果的に防止することができる。
【0078】
また先行車輌が停止し自車も停止した場合であっても、自車の停止開始時点より第一の基準値Ts1の時間が経過する前に先行車輌が走行を再開すると、ステップ60、80、100に於いて否定判別が行われ、ステップ160に於いて運転者に対する制動操作の催促の報知が中止されるので、その後ステップ40に於いて肯定判別が行われてもステップ50に於いて否定判別が行われる。従って先行車輌の停止時間が短いときには、運転者に対し車間距離制御が終了する虞れが高いことを示す警報が出力されたり車間距離制御が終了したりすることなく、運転者はなんらの操作も要することなく車間距離制御を継続させることができる。
【0079】
尚先行車輌が微低速にて走行している状況に於いて車間距離制御が行われている場合には、路面状況の変動等に起因して自車の車速Vが瞬間的に0になることがあるが、図示の実施例によれば、停止不可区域を走行しないときには(ステップ80)、ステップ100に於いて先行車輌が停止した状態にあると判定されない限り運転者に対し制駆動操作を催促する報知が発せられない。従ってステップ40に於いて肯定判別が行われても、ステップ50、80、100に於いて否定判別が行われるので、先行車輌が停止していない状況に於いて自車が停止したと判定されることにより、運転者に対し不必要な制動操作の催促の報知が行われること及びこれに起因して運転者が煩わしさを感じることを確実に防止することができる。
【0080】
(4)先行車輌が停止し自車が停止不可区域に於いて停止する虞れがある場合
この場合にはステップ20〜40に於いて否定判別が行われるが、ステップ80に於いて肯定判別が行われ、ステップ110に於いて車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定される。従って運転者は車間距離制御により自車が停止不可区域に於いて停止する虞れがあると判断すると、軽く制動操作を行うだけで停止不可区域よりも手前側に於いて自車を停止させることができる。
【0081】
(5)先行車輌が走行しているが自車が停止不可区域に於いて停止する虞れがある場合
この場合にもステップ20〜40に於いて否定判別が行われるが、ステップ80に於いて肯定判別が行われ、車速Vが基準値Vo以下であり自車が停止する虞れが高いときにはステップ80に於いて肯定判別が行われることにより、ステップ150に於いて運転者に対し制駆動操作を催促する報知の出力が開始又は維持される。
【0082】
また車速Vが基準値Voよりも高くステップ80に於いて否定判別が行われても、自車が停止するまでの予測時間Taが基準値Tao以下であり自車が停止する虞れが高いときにはステップ140に於いて肯定判別が行われることにより、ステップ150に於いて運転者に対し制駆動操作を催促する報知の出力が開始又は維持される。
【0083】
従って先行車輌が走行しているが自車が停止不可区域に於いて停止する虞れがある場合には、先行車輌が停止していなくても運転者に対し制駆動操作を催促する報知を発しつつ車間距離制御を行い、運転者に確実に制動操作を促すことができる。
【実施例2】
【0084】
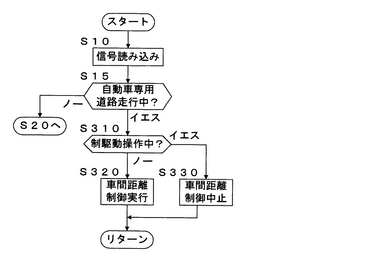
図3は本発明による車輌の走行制御装置の実施例2に於ける走行制御ルーチンの要部を示すフローチャートである。
【0085】
この実施例2に於いては、ステップ10の次にステップ15に於いてナビゲーション装置44よりの情報に基づき自車が高速道路の如き自動車専用道路を走行しているか否かの判別が行われ、否定判別が行われたときには図2のステップ20へ進み、肯定判別が行われたときにはステップ310へ進む。
【0086】
ステップ310に於いては図2のステップ20の場合と同様、運転者により制駆動操作が行われているか否かの判別が行われ、否定判別が行われたときにはステップ320に於いて図2のステップ170の場合と同様の要領にて車間距離制御が実行され、肯定判別が行われたときには図2のステップ210の場合と同様車間距離制御が中止される。
【0087】
従ってこの実施例2によれば、自車が自動車専用道路以外の走行路を走行している場合には、ステップ15に於いて否定判別が行われ、上述の実施例1の場合と同様ステップ20〜200が実行されることにより、上述の実施例1の場合と同様の作用効果を得ることができ、また自車が自動車専用道路を走行している場合にはステップ15に於いて肯定判別が行われ、ステップ310〜330が実行されるので、運転者に対し制駆動操作を催促する報知や車間距離制御が終了する虞れが高いことを示す警報が出力されることなく車間距離制御を実行し、これにより不必要な報知や警報によって運転者を煩わせることなくまた運転者の制駆動操作要することなく自車を先行車輌に対し所定の車間距離を確保して追従走行させることができる。
【0088】
尚この実施例2に於いては、自車が自動車専用道路を走行している場合にも運転者が制駆動操作をすればステップ310に於いて肯定判別が行われ、ステップ330に於いて車間距離制御が中止されるので、運転者が車間距離制御による自車の車速以外の車速や車間距離にて走行したい場合には、制駆動操作をするだけで自らの意思に即した運転を行うことができる。
【0089】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0090】
例えば上述の各実施例に於いては、自車が停止する虞れが高いか否かの判別は自車が停止するまでの予測時間Taが基準値Tao以下であるか否かの判別により行われるようになっているが、自車が停止するまでの予測走行距Laが演算され、予測走行距Laが基準値Lao(正の定数)以下であるか否かの判別により行われてもよい。
【0091】
また上述の各実施例に於いては、制動操作の催促の報知及び車間距離制御が終了する虞れが高いことを示す警報はそれぞれ警報ランプ48の点灯及び点滅により行われるようになっているが、制動操作の催促の報知及び車間距離制御が終了する虞れが高いことを示す警報はそれぞれ別の告知手段により達成されてもよく、その場合告知手段は視覚的告知手段に限定されず、聴覚的告知手段であってもよく、また視覚的告知手段及び聴覚的告知手段の組合せであってもよい。
【0092】
また上述の各実施例に於いては、走行制御は常時実行されるようになっているが、走行制御のオン−オフスイッチが設けられ、スイッチがオン状態にあるときにのみ実施例1又は2による走行制御が実行されるよう修正されてもよい。
【0093】
また上述の各実施例に於いては、自車の前方が車輌の停止不可区域であり、自車が車輌の停止不可区域に於いて停止する可能性があるか否かの判別はナビゲーション装置44よりの情報に基づいて行われるようになっているが、この判別は走行路に設置された情報提供装置より無線式に受信する情報に基づいて行われるよう修正されてもよい。
【0094】
更に上述の実施例2に於いては、自車が自動車専用道路を走行しているか否かの判別もナビゲーション装置44よりの情報に基づいて行われるようになっているが、この判別は走行路に設置された情報提供装置より無線式に受信する情報に基づいて行われるよう修正されてもよく、またこの判別に代えて運転者により操作されるスイッチの設定に基づいて行われるよう修正されてもよい。
【図面の簡単な説明】
【0095】
【図1】本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【図2】実施例1に於ける走行制御ルーチンを示すフローチャートである。
【図3】実施例2に於ける走行制御ルーチンの要部を示すフローチャートである。
【符号の説明】
【0096】
20 制動装置
26 ブレーキペダル
30 電子制御装置
32 レーダーセンサ
34 車速センサ
36 前後加速度センサ
38、42i 圧力センサ
40 アクセル開度センサ
44 ナビゲーション装置
46 エンジン制御装置
48 警報ランプ
【技術分野】
【0001】
本発明は、車輌用走行制御装置に係り、更に詳細には先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に係る。
【背景技術】
【0002】
自動車等の車輌用走行制御装置の一つとして、例えば下記の特許文献1に記載されている如く、運転者が先行車輌に追従して走行することを希望し追従制御開始スイッチがオン状態にされているときには、先行車輌が走行中の場合には先行車輌に対し所定の車間距離を確保しながら先行車輌に追従するよう自車の車速を制御し、また先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させる車輌用走行制御装置が既に知られている。
【特許文献1】特開2002−67733号公報
【特許文献2】特開平6−1222号公報
【特許文献3】特開平7−108850号公報
【特許文献4】特開平9−249102号公報
【特許文献5】特開平11−250399号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述の如き車輌用走行制御装置によれば、先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させることができる。しかし上述の如き車輌用走行制御装置に於いては、先行車輌の停止に伴い自車を停止させる際の停止位置は先行車輌の位置により決定され、自車の停止位置の状況や運転者の意思が考慮されないため、自車が例えば交差点の如き停止不可区域に停止したり、運転者の意思に沿わない位置に於いて停止したりする場合があるという問題がある。
【0004】
尚上記特許文献2には、停止線などの停止位置を認識し、自車速・路面状況・先行車輌との車間距離から最適な制動開始距離を演算し、運転者に警報を発しても制動操作がないときには自動で制動制御を行う走行制御装置が記載されており、上記特許文献3には、自動制動で停車した後に、所定時間自動制動した状態を保持し、運転者に左右確認などの注意を促す警報を行い、所定時間経過後に制動を解除する走行制御装置が記載されている。
【0005】
また上記特許文献4には、自車の速度と加速度から計算した停止予測時間が予め設定された所定時間以下のときにはブレーキ圧を減圧する走行制御装置が記載されており、上記特許文献5には、信号が黄色になるまでの時間、車速、距離に基づき車輌が交差点を通過できるか否かを予測し、運転者に報知する走行制御装置が記載されている。
【0006】
本発明は、先行車輌が走行中の場合には先行車輌に対し所定の車間距離を確保しながら先行車輌に追従するよう自車の車速を制御し、先行車輌が停止すると運転者が制動操作をしなくても自動制動制御により自車を停止させるよう構成された従来の走行制御装置に於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は、先行車輌の停止に伴い自動制動制御により自車を停止させる際に自車の停止位置の状況や運転者の意思を考慮することにより、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に於いて停止したりすることを防止することである。
【課題を解決するための手段】
【0007】
上述の主要な課題は、本発明によれば、先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知を行うことを特徴とする車輌用走行制御装置(請求項1の構成)、又は先行車輌と自車との相対関係に基づき上限車速以下の範囲内にて自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには自車が停止不可区域に於いて停止する虞れがないと判定したときに比して前記上限車速を低く設定することを特徴とする車輌用走行制御装置(請求項11の構成)によって達成される。
【0008】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離を推定するよう構成される(請求項2の構成)。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1又は2の構成に於いて、先行車輌が停止しているか否かを判定し、先行車輌が停止していると判定される場合に前記報知を行うよう構成される(請求項3の構成)。
【0010】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項3の構成に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには先行車輌が停止しているか否かに関係なく前記報知を行うよう構成される(請求項4の構成)。
【0011】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至4の構成に於いて、自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには前記報知を行わないよう構成される(請求項5の構成)。
【0012】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1乃至5の構成に於いて、前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときには前記走行の自動制御を終了するよう構成される(請求項6の構成)。
【0013】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6の構成に於いて、先行車輌が停止しているか否かを判定し、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに前記走行の自動制御を終了するよう構成される(請求項7の構成)。
【0014】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項6又は7の構成に於いて、前記走行の自動制御を終了するに先立って前記走行の自動制御が終了する旨の警報を運転者に対し行うよう構成される(請求項8の構成)。
【0015】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項8の構成に於いて、自車の停止時間が第一の所定の時間以上になったときには前記警報を開始し、しかる後自車の停止時間が第二の所定の時間になったときに前記走行の自動制御を終了するよう構成される(請求項9の構成)。
【0016】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項8又は9の構成に於いて、運転者により加速操作又は減速操作が行われるまで前記警報を継続するよう構成される(請求項10の構成)。
【0017】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項11の構成に於いて、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて自車の車速が前記上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うよう構成される(請求項12の構成)。
【0018】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項11の構成に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うよう構成される(請求項13の構成)。
【発明の効果】
【0019】
上記請求項1の構成によれば、自車が停止するまでの走行時間若しくは走行距離が推定され、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知が行われるので、運転者は走行の自動制御により自車が停止される虞れが高い状況を認識し、これにより走行の自動制御による停止位置に自車を停止させるか、自らの制駆動操作により走行の自動制御による停止位置以外の位置に自車を停止させるかを選択することができ、従って自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止することができる。
【0020】
また上記請求項2の構成によれば、自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離が推定されるので、先行車輌との相対距離の情報を必要とすることなく前記走行時間若しくは前記走行距離を推定することができ、また先行車輌との相対距離及び自車の車速に基づいて走行時間若しくは走行距離が推定される場合に比して、自車が停止するまでの走行時間若しくは走行距離を正確に推定することができる。
【0021】
また上記請求項3の構成によれば、先行車輌が停止しているか否かが判定され、先行車輌が停止していると判定される場合に前記報知が行われるので、先行車輌が停止しておらず、自車が停止する虞れが低い状況に於いて不必要な報知が行われることを防止すると共に、先行車輌が停止しており、自車が停止する虞れが高い状況に於いて必要な報知を確実に運転者に発することができる。
【0022】
また上記請求項4の構成によれば、自車が停止不可区域に於いて停止する虞れがあるか否かが判定され、自車が停止不可区域に於いて停止する虞れがあると判定されたときには先行車輌が停止しているか否かに関係なく前記報知が行われるので、自車が停止不可区域に於いて停止する虞れを確実に低減することができる。
【0023】
また上記請求項5の構成によれば、自車が自動車専用道路を走行中であるか否かが判定され、自車が自動車専用道路を走行中であると判定されたときには前記報知が行われないので、自車が自動車専用道路を走行し自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりする虞れが非常に低い状況に於いて、不要な報知が行われること及びこれに起因して乗員が煩わしさを感じることを確実に防止することができる。
【0024】
また上記請求項6の構成によれば、前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときに走行の自動制御が終了されるので、運転者は報知が行われている状況にて自車が停止することにより、いずれ走行の自動制御が終了することを確実に認識することができ、また走行の自動制御が終了する際に制動操作によりその停止状態を維持するか制駆動操作により他の位置へ自車を移動させるかを判断し行動することができる。
【0025】
また上記請求項7の構成によれば、先行車輌が停止しているか否かが判定され、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに走行の自動制御が終了されるので、先行車輌が停止していない状況にて自車が停止した場合に走行の自動制御が無駄に終了されることを確実に防止することができる。
【0026】
また上記請求項8の構成によれば、走行の自動制御を終了するに先立って走行の自動制御が終了する旨の警報が運転者に対し行われるので、運転者は走行の自動制御が終了する前に走行の自動制御が終了する状況であることを確実に認識することができる。
【0027】
また上記請求項9の構成によれば、自車の停止時間が第一の所定の時間以上になったときには警報が開始し、しかる後自車の停止時間が第二の所定の時間になったときに走行の自動制御が終了されるので、運転者は現在の停止位置を維持するか否かを余裕をもって判断することができる。
【0028】
また上記請求項10の構成によれば、運転者により加速操作又は減速操作が行われるまで警報が継続されるので、運転者は走行の自動制御が終了する状況に於いて確実に加速操作又は減速操作を行うことができる。
【0029】
また上記請求項11の構成によれば、自車が停止不可区域に於いて停止する虞れがあるか否かが判定され、自車が停止不可区域に於いて停止する虞れがあると判定されたときには自車が停止不可区域に於いて停止する虞れがないと判定されたときに比して走行の自動制御に於ける上限車速が低く設定されるので、運転者は軽い制動操作により停止不可区域の手前に於いて自車を停止させることができる。
【0030】
また上記請求項12の構成によれば、自車が停止不可区域に於いて停止する虞れがあると判定された状況に於いて自車の車速が上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知が行われるので、自車が停止不可区域に於いて停止する虞れが高い状況に於いて運転者に対し確実に制駆動操作を催促することができる。
【0031】
また上記請求項13の構成によれば、自車が停止するまでの走行時間若しくは走行距離が推定され、自車が停止不可区域に於いて停止する虞れがあると判定された状況に於いて自車が停止するまでの走行時間若しくは走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知が行われるので、上記請求項12の構成の場合と同様、自車が停止不可区域に於いて停止する虞れが高い状況に於いて運転者に対し確実に制駆動操作を催促することができる。
【0032】
[課題解決手段の好ましい態様]
本発明の一つの好ましい態様によれば、上記請求項1乃至13の構成に於いて、先行車輌との車間距離が目標車間距離になるよう自車の車速若しくは加速度を自動制御することによって自車の走行を自動制御するよう構成される(好ましい態様1)。
【0033】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至13又は上記好ましい態様1の構成に於いて、先行車輌が停止し先行車輌との車間距離が基準値以下になったときに自車を停止させるよう構成される(好ましい態様1)。
【0034】
本発明の他の一つの好ましい態様によれば、上記請求項3の構成に於いて、先行車輌との相対速度及び自車の車速を検出し、相対速度及び自車の車速が実質的に同一であるときに先行車輌が停止していると判定するよう構成される(好ましい態様2)。
【0035】
本発明の他の一つの好ましい態様によれば、上記請求項4又は請求項11乃至13の構成に於いて、ナビゲーション装置若しくは走行路に設置された走行路情報提供装置より無線式に供給される情報に基づいて自車が停止不可区域に於いて停止する虞れがあるか否かを判定するよう構成される(好ましい態様3)。
【0036】
本発明の他の一つの好ましい態様によれば、上記請求項11の構成に於いて、自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには自車が停止不可区域に於いて停止する虞れがあるか否かの判定を行わないよう構成される(好ましい態様4)。
【発明を実施するための最良の形態】
【0037】
以下に添付の図を参照しつつ、本発明を好ましい実施例について詳細に説明する。
【実施例1】
【0038】
図1は本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【0039】
図1に於いて、10FL及び10FRはそれぞれ車輌12の左右の前輪を示し、10RL及び10RRはそれぞれ駆動輪である左右の後輪を示している。従動輪であり操舵輪でもある左右の前輪10FL及び10FRは図1には示されていないが運転者によるステアリングホイールの転舵に応答して駆動されるラック・アンド・ピニオン式のパワーステアリング装置によりタイロッドを介して操舵される。
【0040】
各車輪の制動力は制動装置20の油圧回路22によりホイールシリンダ24FR、24FL、24RR、24RLの制動圧が制御されることによって制御されるようになっている。図には示されていないが、油圧回路22はリザーバ、オイルポンプ、種々の弁装置等を含み、各ホイールシリンダの制動圧は通常時には運転者によるブレーキペダル26の踏み込み操作に応じて駆動されるマスタシリンダ28により制御され、また必要に応じて後に詳細に説明する如く電子制御装置30により制御される。
【0041】
車輌12には例えばミリ波の如き電波やレーザ光を利用して先行車輌を検出すると共に自車に対する先行車輌の相対距離Lre及び相対速度Vreを検出するレーダーセンサ32が設けられている。また車輌12には車速Vを検出する車速センサ34、車輌の前後加速度Gxを検出する前後加速度センサ36、マスタシリンダ圧力Pmを検出する圧力センサ38、運転者によるアクセルペダルの踏込量をアクセル開度φとして検出するアクセル開度センサ40が設けられている。更に各ホイールシリンダ24FR〜24RLにはその圧力Pbi(i=fl、fr、rl、rr)を各車輪の制動圧として検出する圧力センサ42i(i=fl、fr、rl、rr)が設けられている。尚自車に対する先行車輌の相対速度Vreは、先行車輌及び自車の車速をそれぞれVf、Vsとすると、Vf−Vsである。
【0042】
図示の如く、レーダーセンサ32により検出された相対距離Lre及び相対速度Vreを示す信号、車速センサ34により検出された車速Vを示す信号、前後加速度センサ36により検出された車輌の前後加速度Gxを示す信号、圧力センサ38により検出されたマスタシリンダ圧力Pmを示す信号、アクセル開度センサ40により検出されたアクセル開度φを示す信号、圧力センサ42iにより検出された各車輪の制動圧Pbiを示す信号は電子制御装置30へ入力される。
【0043】
また電子制御装置30にはナビゲーション装置44より自車の走行位置等に関する情報及びエンジン制御装置46よりアクセル開度φを示す信号が入力され、電子制御装置30は必要に応じて警報ランプ48を点灯又は点滅させる指令信号を出力し、エンジン制御装置46に対しエンジンの出力に関する指令信号を出力する。エンジン制御装置46は電子制御装置30より指令信号が出力されていない通常時にはアクセル開度φ等に基づき図には示されていないエンジンの出力を制御し、電子制御装置30より指令信号が出力されているときには該指令信号に基づいてエンジンの出力を制御する。
【0044】
尚図1には詳細に示されていないが、電子制御装置30は例えばCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続された一般的な構成のマイクロコンピュータ及び駆動回路を含んでいる。
【0045】
電子制御装置30は、図2に示されたフローチャートに従い、先行車輌及び自車が走行しているときには、レーダーセンサ34によりに検出された相対距離Lre及び相対速度Vreに基づき、相対距離Lreが目標車間距離Ltとは異なるときには相対距離Lreが目標車間距離Ltになるよう制動装置20又はエンジン制御装置46に対し指令信号を出力して車速V又は前後加速度Gxを制御し、相対距離Lreが実質的に目標車間距離Ltであるときには相対速度Vreが実質的に0になるよう制動装置20又はエンジン制御装置46に対し指令信号を出力して車速V又は前後加速度Gxを制御する車間距離制御を行う。
【0046】
また電子制御装置30は、先行車輌が停止し自車も停止する虞れがあるときには、車速V及び前後加速度Gxに基づき自車が停止するまでの予測時間Taを演算し、予測時間Taが基準値Tao以下であるときには、警報ランプ48を点灯することにより運転者に制駆動操作を催促する報知を行うと共に、車間距離制御を行う。
【0047】
また電子制御装置30は、ナビゲーション装置44よりの情報に基づき自車が走行している区域が車輌の停止不可区域又はその前方であるか否かを判定し、自車が走行している区域が車輌の停止不可区域又はその手前であるときには車間距離制御に於ける最大許容速度Vmaxを微低速走行制限値Vmaxoに制限する。また電子制御装置30は、自車が走行している区域が車輌の停止不可区域又はその手前である場合に於いて、自車の車速Vが非常に低い場合又は自車が停止するまでの予測時間Taが基準値Tao以下であるときには、警報ランプ48を点灯することにより運転者に制駆動操作を催促する報知を行うと共に、車間距離制御を行う。
【0048】
また電子制御装置30は、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、停止時間Tsが第一の基準値Ts1以上になると、警報ランプ48を点滅させることにより運転者に車間距離制御が終了する虞れが高いことを示す警報を発すると共に、車間距離制御を行う。
【0049】
更に電子制御装置30は、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、運転者により制動操作が行われることなく停止時間Tsが第二の基準値Ts2以上になると、車間距離制御を中止し、運転者に制駆動操作を催促する報知を行っている状況に於いて自車が停止し、運転者により制動操作が行われると、停止時間Tsが第二の基準値Ts2未満であっても車間距離制御を中止する。
【0050】
尚電子制御装置30は、車間距離制御を行っている状況に於いて運転者により制駆動制御が行われると車間距離制御を中止し、特に運転者に制駆動操作を催促する報知又は車間距離制御が終了する虞れが高いことを示す警報を発しつつ車間距離制御を行っている状況に於いて運転者により制駆動制御が行われると、車間距離制御を中止すると共に、報知又は警報を中止する。
【0051】
次に図2に示されたフローチャートを参照して図示の実施例1に於ける車輌の走行制御ルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、イグニッションスイッチが開成されるまで所定の時間毎に繰返し実行される。
【0052】
まずステップ10に於いてはレーダーセンサ32により検出された相対距離Lre及び相対速度Vreを示す信号等の読み込みが行われ、ステップ20に於いてはマスタシリンダ圧力Pm又はアクセル開度φに基づき運転者により制駆動操作が行われているか否かの判別が行われ、肯定判別が行われたときにはステップ210へ進み、否定判別が行われたときにはステップ30へ進む。
【0053】
ステップ30に於いては車間距離制御が終了する虞れが高いことを示す警報が出力されているか否かの判別、即ち警報ランプ48が点滅中であるか否かの判別が行われ、肯定判別が行われたときにはステップ180へ進み、否定判別が行われたときにはステップ40へ進む。
【0054】
ステップ40に於いては例えば車速Vに基づき自車が停止状態にあるか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ50へ進む。
【0055】
ステップ50に於いては運転者に対し制駆動操作を催促する報知が出力されているか否かの判別、即ち警報ランプ48が点灯されているか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ60へ進む。
【0056】
ステップ60に於いては自車が停止した時点よりの経過時間、即ち自車の停止時間Tsが基準値Ts1(正の定数)以上であるか否かの判別が行われ、否定判別が行われたときにはステップ80へ進み、肯定判別が行われたときにはステップ70に於いて警報ランプ48が点滅されることにより運転者に対し車間距離制御が終了する虞れが高いことを示す警報の出力が開始又は継続される。
【0057】
ステップ80に於いてはナビゲーション装置44よりの情報に基づき自車の前方が車輌の停止不可区域であり、自車が車輌の停止不可区域に於いて停止する可能性があるか否かの判別が行われ、否定判別が行われたときにはステップ110へ進み、肯定判別が行われたときにはステップ90に於いて車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに制限されているときにはその速度制限が解除される。
【0058】
ステップ100に於いては例えば相対速度Vreと自車の車速Vとが実質的に同一であるか否かの判別により、先行車輌が停止した状態にあるか否かの判別が行われ、肯定判別が行われたときにはステップ130へ進み、否定判別が行われたときにはステップ160へ進む。
【0059】
ステップ110に於いては車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定され、ステップ120に於いては自車の車速Vが基準値Vo(正の定数)以下であるか否かの判別が行われ、肯定判別が行われたときにはステップ150へ進み、否定判別が行われたときにはステップ130に於いて例えば自車の車速V又は前後加速度Gx(減速度)に基づき自車が停止するまでの予測時間Taが演算される。
【0060】
尚基準値Voは先行車輌が停止する可能性が高いことを判定するための値として最高許容速度Vmaxよりも小さい値に設定される。また自車が停止するまでの予測時間Taの演算に使用される減速度は車間距離制御の目標減速度であってもよい。
【0061】
ステップ140に於いては自車が停止するまでの予測時間Taが基準値Tao(正の定数)以下であるか否かの判別が行われ、肯定判別が行われたときにはステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持され、否定判別が行われたときにはステップ160に於いて警報ランプ48が点灯されているときには警報ランプ48が消灯されることにより運転者に対する制動操作の催促の報知が中止され、警報ランプ48が点灯されていないときにはその状態が維持される。尚基準値Taoは運転者が余裕をもって制動操作を行うことができる時間に設定される。
【0062】
ステップ170に於いては車速Vが高いほど目標車間距離Ltが短くなるよう、車速Vに基づき図には示されていないマップより先行車輌と自車との間の目標車間距離Ltが演算されると共に、車間距離Lreが目標車間距離Ltになるよう制動装置20又はエンジン制御装置46に対しそれぞれ各車輪の制動力又はエンジンの出力を制御する指令信号が出力され、これにより車間距離制御が実行される。
【0063】
尚上述のステップ110に於いて自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定されているときには、自車の車速Vが微低速走行制限値Vmaxoを越えないよう各車輪の制動力又はエンジンの出力が制御される。
【0064】
ステップ180に於いては各車輪の制動力が自車を停止状態に保持するに必要な制動力にするための指令信号が制動装置20に対し出力され、ステップ190に於いては自車の停止時間Tsが第二の基準値Ts2(第一の基準値Ts1よりも大きい正の定数)以上であるか否かの判別が行われ、否定判別が行われたときにはそのまま図2に示されたルーチンによる制御が一旦終了され、肯定判別が行われたときにはステップ200に於いて車間距離制御が中止された後図2に示されたルーチンによる制御が一旦終了される。
【0065】
ステップ210に於いては車間距離制御が中止され、ステップ220に於いては警報ランプ48が消灯されることにより、運転者に対し制駆動操作を催促する報知が出力されているときには該報知が中止され、運転者に対し車間距離制御が終了する虞れが高いことを示す警報が出力されているときには該警報が中止され、しかる後図2に示されたルーチンによる制御が一旦終了される。
【0066】
次に車輌の種々の走行状態について、上述の如く構成された図示の実施例1の走行制御装置の作動を説明する。
【0067】
(1)先行車輌及び自車が停止不可区域ではない走行路を走行している場合
この場合にはステップ20〜40、80、100に於いて否定判別が行われ、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。従って自車は運転者の制駆動操作を要することなく先行車輌との間に目標車間距離Ltの車間をとって自動的に先行車輌に追従走行する。
【0068】
尚目標車間距離Ltは車速Vが高いほど短くなるよう車速Vに応じて可変設定されるので、車速Vが高いほど車間距離Lreが大きくなるよう制御される。また運転者により制駆動操作が行われると、ステップ20に於いて肯定判別が行われ、ステップ210に於いて車間距離制御が中止されるので、運転者は自らの意思に基づいて自車を加減速運転することができる。
【0069】
(2)停止不可区域ではない走行路を走行中に先行車輌が停止した場合
この場合にはステップ20〜40、80に於いて否定判別が行われるが、ステップ100に於いて肯定判別が行われ、ステップ130に於いて自車が停止するまでの予測時間Taが演算される。予測時間Taが基準値Taoよりも大きいときには、ステップ140に於いて否定判別が行われ、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。
【0070】
これに対し予測時間Taが基準値Tao以下であるときには、ステップ140に於いて肯定判別が行われ、ステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持され、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御される。
【0071】
従って運転者は先行車輌の停止に伴って自車が停止する可能性が高いことを認識することができ、自動制動により自車を停止させるか、自己の制駆動操作により自動制動による停止位置よりも手前又は先で停止するかを選択することができる。
【0072】
尚運転者が自動制動により自車を停止させることを選択し制駆動操作を行わなかった場合には、自車は先行車輌との車間が減少するにつれて自動制動により車速が漸次低下し、先行車輌との車間が目標車間距離Ltになった段階で自動的に停止する。これに対し運転者が自己の制駆動操作により自動制動による停止位置よりも手前又は先で停止することを選択し制駆動操作を行った場合には、ステップ20に於いて肯定判別が行われ、ステップ210に於いては車間距離制御が中止されるので、運転者は希望する停止位置に自車を停止させることができる。
【0073】
また自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには、ステップ140に於いて否定判別が行われ、ステップ160に於いて警報ランプ48が点灯されているときには警報ランプ48が消灯されることにより運転者に対する制動操作の催促の報知が中止され、警報ランプ48が点灯されていないときにはその状態が維持されるので、先行車輌が停止しても自車が停止する可能性が低い状況に於いて運転者に対し不必要な制動操作の催促の報知が行われること及びこれに起因して運転者が煩わしさを感じることを確実に防止することができる。
【0074】
(3)停止不可区域ではない走行路を走行中に先行車輌が停止し自車も停止した場合
この場合にはステップ20及び30に於いて否定判別が行われるが、ステップ40及び50に於いて肯定判別が行われ、自車の停止時間Tsが第一の基準値Ts1未満であるときには、ステップ60及び80に於いて否定判別が行われ、ステップ100及び140に於いて肯定判別が行われ、これによりステップ150に於いて警報ランプ48が点灯されることにより運転者に対し制駆動操作を催促する報知の出力が開始又は維持されると共に、ステップ170に於いて車間距離制御が実行されることにより、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに維持される。
【0075】
また自車の停止時間Tsが第一の基準値Ts1以上になると、ステップ60に於いて肯定判別が行われ、ステップ70及び160に於いて警報ランプ48が点滅されることにより制駆動操作を催促する報知の出力が中止されると共に運転者に対し車間距離制御が終了する虞れが高いことを示す警報の出力が開始又は継続される。そしてステップ20に於いて否定判別が行われると共にステップ30に於いて肯定判別が行われ、自車の停止開始時点より第二の基準値Ts2の時間が経過するまで自動制動により自車が停止状態に保持され、自車の停止時間Tsが第二の基準値Ts2以上になると、ステップ190に於いて肯定判別が行われ、ステップ200に於いて車間距離制御が中止されることにより各車輪に対する制動力が解除され、自車はクリープにより前進する。
【0076】
従って運転者は制駆動操作を催促する報知より車間距離制御が終了する虞れが高いことを示す警報へ変化することにより車間距離制御が終了する虞れが高いことを確実に識認することができ、自車の停止開始時点より第一の基準値Ts1の時間が経過した後第二の基準値Ts2の時間が経過するまでの間に余裕をもって現在の停止位置を維持するか否かを判断することができ、現在の停止位置を維持すると判断したときには自車を停止状態に維持するに足る制動操作を行って継続すればよく、現在の停止位置よりも前方へ自車を移動させたいと判断したときには一旦制駆動操作を行った後自車が所望の位置まで移動した段階で自車を停止させるに足る制動操作を行って継続すればよい。
【0077】
かくして先行車輌が停止し自車も停止した場合には、運転者は周囲の状況に鑑みて現在の停止位置を維持するか否かを余裕をもって判断することができ、現在の停止位置よりも前方へ自車を移動させたいと判断したときには制駆動操作を行うだけで自車を所望の位置へ移動し停止させることができる。また制駆動操作を催促する報知より車間距離制御が終了する虞れが高いことを示す警報へ変化すると、運転者が制駆動操作をしない限り報知より警報への変化の時点よりTs2‐Ts1の時間が経過した段階で車間距離制御が終了することを認識することができるので、運転者が車間距離制御が終了するのか継続するのかの判断に迷うことを効果的に防止することができる。
【0078】
また先行車輌が停止し自車も停止した場合であっても、自車の停止開始時点より第一の基準値Ts1の時間が経過する前に先行車輌が走行を再開すると、ステップ60、80、100に於いて否定判別が行われ、ステップ160に於いて運転者に対する制動操作の催促の報知が中止されるので、その後ステップ40に於いて肯定判別が行われてもステップ50に於いて否定判別が行われる。従って先行車輌の停止時間が短いときには、運転者に対し車間距離制御が終了する虞れが高いことを示す警報が出力されたり車間距離制御が終了したりすることなく、運転者はなんらの操作も要することなく車間距離制御を継続させることができる。
【0079】
尚先行車輌が微低速にて走行している状況に於いて車間距離制御が行われている場合には、路面状況の変動等に起因して自車の車速Vが瞬間的に0になることがあるが、図示の実施例によれば、停止不可区域を走行しないときには(ステップ80)、ステップ100に於いて先行車輌が停止した状態にあると判定されない限り運転者に対し制駆動操作を催促する報知が発せられない。従ってステップ40に於いて肯定判別が行われても、ステップ50、80、100に於いて否定判別が行われるので、先行車輌が停止していない状況に於いて自車が停止したと判定されることにより、運転者に対し不必要な制動操作の催促の報知が行われること及びこれに起因して運転者が煩わしさを感じることを確実に防止することができる。
【0080】
(4)先行車輌が停止し自車が停止不可区域に於いて停止する虞れがある場合
この場合にはステップ20〜40に於いて否定判別が行われるが、ステップ80に於いて肯定判別が行われ、ステップ110に於いて車間距離制御に於ける自車の最高許容速度Vmaxが微低速走行制限値Vmaxoに設定される。従って運転者は車間距離制御により自車が停止不可区域に於いて停止する虞れがあると判断すると、軽く制動操作を行うだけで停止不可区域よりも手前側に於いて自車を停止させることができる。
【0081】
(5)先行車輌が走行しているが自車が停止不可区域に於いて停止する虞れがある場合
この場合にもステップ20〜40に於いて否定判別が行われるが、ステップ80に於いて肯定判別が行われ、車速Vが基準値Vo以下であり自車が停止する虞れが高いときにはステップ80に於いて肯定判別が行われることにより、ステップ150に於いて運転者に対し制駆動操作を催促する報知の出力が開始又は維持される。
【0082】
また車速Vが基準値Voよりも高くステップ80に於いて否定判別が行われても、自車が停止するまでの予測時間Taが基準値Tao以下であり自車が停止する虞れが高いときにはステップ140に於いて肯定判別が行われることにより、ステップ150に於いて運転者に対し制駆動操作を催促する報知の出力が開始又は維持される。
【0083】
従って先行車輌が走行しているが自車が停止不可区域に於いて停止する虞れがある場合には、先行車輌が停止していなくても運転者に対し制駆動操作を催促する報知を発しつつ車間距離制御を行い、運転者に確実に制動操作を促すことができる。
【実施例2】
【0084】
図3は本発明による車輌の走行制御装置の実施例2に於ける走行制御ルーチンの要部を示すフローチャートである。
【0085】
この実施例2に於いては、ステップ10の次にステップ15に於いてナビゲーション装置44よりの情報に基づき自車が高速道路の如き自動車専用道路を走行しているか否かの判別が行われ、否定判別が行われたときには図2のステップ20へ進み、肯定判別が行われたときにはステップ310へ進む。
【0086】
ステップ310に於いては図2のステップ20の場合と同様、運転者により制駆動操作が行われているか否かの判別が行われ、否定判別が行われたときにはステップ320に於いて図2のステップ170の場合と同様の要領にて車間距離制御が実行され、肯定判別が行われたときには図2のステップ210の場合と同様車間距離制御が中止される。
【0087】
従ってこの実施例2によれば、自車が自動車専用道路以外の走行路を走行している場合には、ステップ15に於いて否定判別が行われ、上述の実施例1の場合と同様ステップ20〜200が実行されることにより、上述の実施例1の場合と同様の作用効果を得ることができ、また自車が自動車専用道路を走行している場合にはステップ15に於いて肯定判別が行われ、ステップ310〜330が実行されるので、運転者に対し制駆動操作を催促する報知や車間距離制御が終了する虞れが高いことを示す警報が出力されることなく車間距離制御を実行し、これにより不必要な報知や警報によって運転者を煩わせることなくまた運転者の制駆動操作要することなく自車を先行車輌に対し所定の車間距離を確保して追従走行させることができる。
【0088】
尚この実施例2に於いては、自車が自動車専用道路を走行している場合にも運転者が制駆動操作をすればステップ310に於いて肯定判別が行われ、ステップ330に於いて車間距離制御が中止されるので、運転者が車間距離制御による自車の車速以外の車速や車間距離にて走行したい場合には、制駆動操作をするだけで自らの意思に即した運転を行うことができる。
【0089】
以上に於いては本発明を特定の実施例について詳細に説明したが、本発明は上述の実施例に限定されるものではなく、本発明の範囲内にて他の種々の実施例が可能であることは当業者にとって明らかであろう。
【0090】
例えば上述の各実施例に於いては、自車が停止する虞れが高いか否かの判別は自車が停止するまでの予測時間Taが基準値Tao以下であるか否かの判別により行われるようになっているが、自車が停止するまでの予測走行距Laが演算され、予測走行距Laが基準値Lao(正の定数)以下であるか否かの判別により行われてもよい。
【0091】
また上述の各実施例に於いては、制動操作の催促の報知及び車間距離制御が終了する虞れが高いことを示す警報はそれぞれ警報ランプ48の点灯及び点滅により行われるようになっているが、制動操作の催促の報知及び車間距離制御が終了する虞れが高いことを示す警報はそれぞれ別の告知手段により達成されてもよく、その場合告知手段は視覚的告知手段に限定されず、聴覚的告知手段であってもよく、また視覚的告知手段及び聴覚的告知手段の組合せであってもよい。
【0092】
また上述の各実施例に於いては、走行制御は常時実行されるようになっているが、走行制御のオン−オフスイッチが設けられ、スイッチがオン状態にあるときにのみ実施例1又は2による走行制御が実行されるよう修正されてもよい。
【0093】
また上述の各実施例に於いては、自車の前方が車輌の停止不可区域であり、自車が車輌の停止不可区域に於いて停止する可能性があるか否かの判別はナビゲーション装置44よりの情報に基づいて行われるようになっているが、この判別は走行路に設置された情報提供装置より無線式に受信する情報に基づいて行われるよう修正されてもよい。
【0094】
更に上述の実施例2に於いては、自車が自動車専用道路を走行しているか否かの判別もナビゲーション装置44よりの情報に基づいて行われるようになっているが、この判別は走行路に設置された情報提供装置より無線式に受信する情報に基づいて行われるよう修正されてもよく、またこの判別に代えて運転者により操作されるスイッチの設定に基づいて行われるよう修正されてもよい。
【図面の簡単な説明】
【0095】
【図1】本発明による車輌の走行制御装置の実施例1を示す概略構成図である。
【図2】実施例1に於ける走行制御ルーチンを示すフローチャートである。
【図3】実施例2に於ける走行制御ルーチンの要部を示すフローチャートである。
【符号の説明】
【0096】
20 制動装置
26 ブレーキペダル
30 電子制御装置
32 レーダーセンサ
34 車速センサ
36 前後加速度センサ
38、42i 圧力センサ
40 アクセル開度センサ
44 ナビゲーション装置
46 エンジン制御装置
48 警報ランプ
【特許請求の範囲】
【請求項1】
先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知を行うことを特徴とする車輌用走行制御装置。
【請求項2】
自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離を推定することを特徴とする請求項1に記載の車輌用走行制御装置。
【請求項3】
先行車輌が停止しているか否かを判定し、先行車輌が停止していると判定される場合に前記報知を行うことを特徴とする請求項1又は2に記載の車輌用走行制御装置。
【請求項4】
自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには先行車輌が停止しているか否かに関係なく前記報知を行うことを特徴とする請求項3に記載の車輌用走行制御装置。
【請求項5】
自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには前記報知を行わないことを特徴とする請求項1乃至4に記載の車輌用走行制御装置。
【請求項6】
前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときには前記走行の自動制御を終了することを特徴とする請求項1乃至5に記載の車輌用走行制御装置。
【請求項7】
先行車輌が停止しているか否かを判定し、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに前記走行の自動制御を終了することを特徴とする請求項6に記載の車輌用走行制御装置。
【請求項8】
前記走行の自動制御を終了するに先立って前記走行の自動制御が終了する旨の警報を運転者に対し行うことを特徴とする請求項6又は7に記載の車輌用走行制御装置。
【請求項9】
自車の停止時間が第一の所定の時間以上になったときには前記警報を開始し、しかる後自車の停止時間が第二の所定の時間になったときに前記走行の自動制御を終了することを特徴とする請求項8に記載の車輌用走行制御装置。
【請求項10】
運転者により加速操作又は減速操作が行われるまで前記警報を継続することを特徴とする請求項8又は9に記載の車輌用走行制御装置。
【請求項11】
先行車輌と自車との相対関係に基づき上限車速以下の範囲内にて自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには自車が停止不可区域に於いて停止する虞れがないと判定したときに比して前記上限車速を低く設定することを特徴とする車輌用走行制御装置。
【請求項12】
自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて自車の車速が前記上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うことを特徴とする請求項11に記載の車輌用走行制御装置。
【請求項13】
自車が停止するまでの走行時間若しくは走行距離を推定し、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うことを特徴とする請求項11に記載の車輌用走行制御装置。
【請求項1】
先行車輌と自車との相対関係に基づき自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止するまでの走行時間若しくは走行距離を推定し、前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには運転者に対し制駆動操作を催促する報知を行うことを特徴とする車輌用走行制御装置。
【請求項2】
自車の車速及び減速度に基づいて前記走行時間若しくは前記走行距離を推定することを特徴とする請求項1に記載の車輌用走行制御装置。
【請求項3】
先行車輌が停止しているか否かを判定し、先行車輌が停止していると判定される場合に前記報知を行うことを特徴とする請求項1又は2に記載の車輌用走行制御装置。
【請求項4】
自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには先行車輌が停止しているか否かに関係なく前記報知を行うことを特徴とする請求項3に記載の車輌用走行制御装置。
【請求項5】
自車が自動車専用道路を走行中であるか否かを判定し、自車が自動車専用道路を走行中であると判定したときには前記報知を行わないことを特徴とする請求項1乃至4に記載の車輌用走行制御装置。
【請求項6】
前記報知を行っている状況にて自車が停止し自車の停止時間が所定の時間以上になったときには前記走行の自動制御を終了することを特徴とする請求項1乃至5に記載の車輌用走行制御装置。
【請求項7】
先行車輌が停止しているか否かを判定し、先行車輌が停止した状況にて自車が停止し自車の停止時間が所定の時間以上になったときに前記走行の自動制御を終了することを特徴とする請求項6に記載の車輌用走行制御装置。
【請求項8】
前記走行の自動制御を終了するに先立って前記走行の自動制御が終了する旨の警報を運転者に対し行うことを特徴とする請求項6又は7に記載の車輌用走行制御装置。
【請求項9】
自車の停止時間が第一の所定の時間以上になったときには前記警報を開始し、しかる後自車の停止時間が第二の所定の時間になったときに前記走行の自動制御を終了することを特徴とする請求項8に記載の車輌用走行制御装置。
【請求項10】
運転者により加速操作又は減速操作が行われるまで前記警報を継続することを特徴とする請求項8又は9に記載の車輌用走行制御装置。
【請求項11】
先行車輌と自車との相対関係に基づき上限車速以下の範囲内にて自車の走行を自動制御する車輌用走行制御装置に於いて、自車が停止不可区域に於いて停止する虞れがあるか否かを判定し、自車が停止不可区域に於いて停止する虞れがあると判定したときには自車が停止不可区域に於いて停止する虞れがないと判定したときに比して前記上限車速を低く設定することを特徴とする車輌用走行制御装置。
【請求項12】
自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて自車の車速が前記上限車速よりも低い基準値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うことを特徴とする請求項11に記載の車輌用走行制御装置。
【請求項13】
自車が停止するまでの走行時間若しくは走行距離を推定し、自車が停止不可区域に於いて停止する虞れがあると判定した状況に於いて前記走行時間若しくは前記走行距離がそれぞれ対応する所定値以下であるときには先行車輌が停止しているか否かに関係なく運転者に対し制駆動操作を催促する報知を行うことを特徴とする請求項11に記載の車輌用走行制御装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−4242(P2006−4242A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−180900(P2004−180900)
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]