
車輌用車外監視装置
【目的】 撮像時の焦点距離を適切な値として車外監視の際の外界認識率を向上する。
【構成】 車速センサ5で検出した車輌1の車速に応じ、焦点距離設定手段15で適正な焦点距離を設定して撮像手段10及び前記画像処理手段20へ出力すると、撮像手段10のズーム機構が駆動され、設定焦点距離で車外の対象が撮像される。そして、画像処理手段20において、撮像時の焦点距離に基づいて撮像した画像が処理され、外界情報が得られる。これにより、低速域では焦点距離を小さくしてより広い視野を確保して、外界状況を正確に把握することができるとともに、高速域では焦点距離を大きくしてより遠方を監視することができ、障害物をより遠方で検出して走行安全性を向上することができる。
【構成】 車速センサ5で検出した車輌1の車速に応じ、焦点距離設定手段15で適正な焦点距離を設定して撮像手段10及び前記画像処理手段20へ出力すると、撮像手段10のズーム機構が駆動され、設定焦点距離で車外の対象が撮像される。そして、画像処理手段20において、撮像時の焦点距離に基づいて撮像した画像が処理され、外界情報が得られる。これにより、低速域では焦点距離を小さくしてより広い視野を確保して、外界状況を正確に把握することができるとともに、高速域では焦点距離を大きくしてより遠方を監視することができ、障害物をより遠方で検出して走行安全性を向上することができる。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置に関する。
【0002】
【従来の技術】従来より、カメラ等の撮像手段を車輌に搭載し、撮像した画像を処理して車外の状態を認識・監視する技術の開発が進められており、例えば、特開平3−225513号公報には、テレビカメラでとらえた進行方向前方の道路帯画像を画像処理して道路情報を抽出し、走行制御を行なう技術が開示されている。
【0003】
【発明が解決しようとする課題】ところで、車外監視の際には、低速ではより広い視野を確保し、高速においてはより遠方を監視することが外界認識率を向上して安全性を高める上で重要であり、車速に応じた適切な焦点距離で車外の対象を撮像し、この撮像時の焦点距離に基づいて画像処理を行なう必要がある。
【0004】本発明は前記事情に鑑みてなされたもので、撮像時の焦点距離を適切な値として車外監視の際の外界認識率を向上することのできる車輌用車外監視装置を提供することを目的としている。
【0005】
【課題を解決するための手段】本発明は、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置において、車輌の速度に応じて撮像の焦点距離を設定し、この焦点距離の設定値を出力する焦点距離設定手段と、所定範囲内で焦点距離を可変可能なズーム機構を有し、前記焦点距離設定手段で設定した焦点距離の設定値で車外の対象を撮像する撮像手段と、前記撮像手段で撮像した画像を、前記焦点距離設定手段で設定した焦点距離の設定値に基づいて処理し、外界情報を得る画像処理手段とを備えたことを特徴とする。
【0006】
【作用】本発明では、焦点距離設定手段で車輌の速度に応じて焦点距離が設定されると、撮像手段のズーム機構が焦点距離の設定値となるよう駆動され、設定した焦点距離で車外の対象が撮像される。そして、撮像した画像が焦点距離の設定値すなわち撮像時の焦点距離に基づいて処理され、外界情報が得られる。
【0007】
【実施例】以下、図面を参照して本発明の実施例を説明する。図面は本発明の一実施例に係わり、図1は車外監視装置の全体構成図、図2は車輌の正面図、図3はカメラと被写体との関係を示す説明図、図4は車外監視装置の回路構成図、図5は焦点距離設定処理のフローチャート、図6はずれ量検出処理のフローチャート、図7は画像認識処理のフローチャートである。
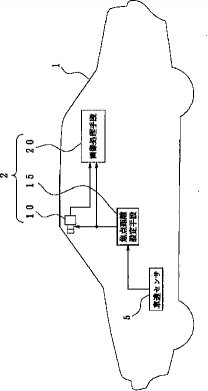
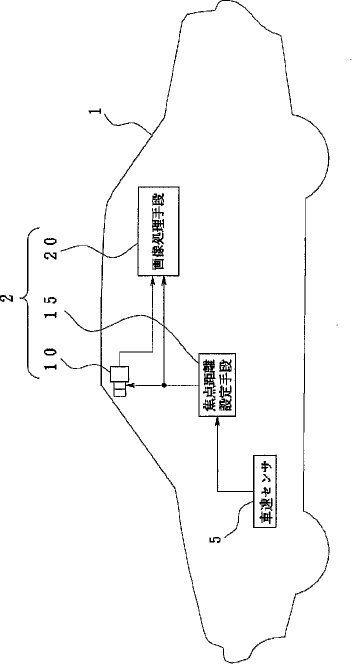
【0008】図1において、符号1は自動車などの車輌であり、この車輌1に、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車外監視装置2が搭載されている。この車外監視装置2は、外部からの入力に応じて焦点距離を所定範囲内で変更するズーム機構を有し、車外の対象を近距離から遠距離に渡って撮像可能な撮像手段10と、この撮像手段10によって撮像した画像を撮像時の焦点距離に基づいて処理し、外界情報を得る画像処理手段20と、車速センサ5で検出した車輌1の車速に応じて適正な焦点距離を設定し、この焦点距離の設定値を前記撮像手段10及び前記画像処理手段20へ出力する焦点距離設定手段15とを備えている。
【0009】前記画像処理手段20で得られる外界情報としては、先ず、車外の対象までの距離情報があり、この距離情報に基づいて道路形状や立体物等の認識が行なわれる。そして、認識した立体物が自車輌に対して障害物となる場合、図示しないアクチュエータ類を制御する外部装置を接続することにより、運転者に対する警告、自動衝突回避等の動作を行なうことが可能となる。
【0010】本実施例は、車外の対象を異なる位置から撮像した1組の画像に対し、対応する位置のずれ量から三角測量の原理によって距離を求める、いわゆるステレオ法による画像処理で距離情報を得るものであり、前記撮像手段10は、左右画像用として、例えば電荷結合素子(CCD)等の固体撮像素子を用いた2台のカメラにより構成されている。
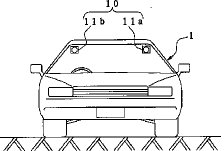
【0011】すなわち、図2に示すように、ズーム機構付きCCDカメラ11a,11b(代表してCCDカメラ11と表記する場合もある)が、それぞれ車室内の天井前方に一定の間隔をもって取り付けられ、車室内のCCDカメラ11の取付位置を、例えば、車輌1のボンネット先端から2mとすると、例えば、直近から100m遠方までを撮像する場合、実際には前方2mから100mまでの位置を撮像することになる。
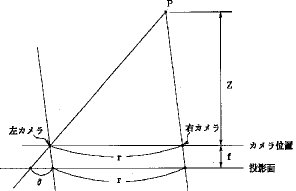
【0012】この場合、図3に示すように、2台のCCDカメラ11a、11bの取付間隔をrとして、2台のカメラ11a,11bの設置面から距離Zにある点Pを撮影すると、2台のカメラ11a,11bの焦点距離を共にfとして、点Pの像は、それぞれのカメラについて焦点位置からfだけ離れた投影面に写る。
【0013】このとき、右のCCDカメラ11bにおける像の位置から左のCCDカメラ11aにおける像の位置までの距離は、r+δとなり、このδをずれ量とすると、点Pまでの距離Zは、ずれ量δから以下の式で求めることができる。
【0014】
Z=r・f/δ (1)
この左右画像のずれ量δを検出するには、左右画像における同一物体の像を見つけ出す必要があり、前記画像処理装置20では、画像を小領域に分割し、それぞれの小領域内の輝度あるいは色のパターンを左右画像で比較して一致する領域を見つけ出し、全画面に渡って距離分布を求める。
【0015】左右画像の一致度は、右画像、左画像のi番目画素の輝度(色を用いても良い)を、それぞれ、Ai、Biとすると、例えば、以下の(2)式に示すシティブロック距離Hによって評価することができる。
【0016】
H=Σ|Ai−Bi| (2)
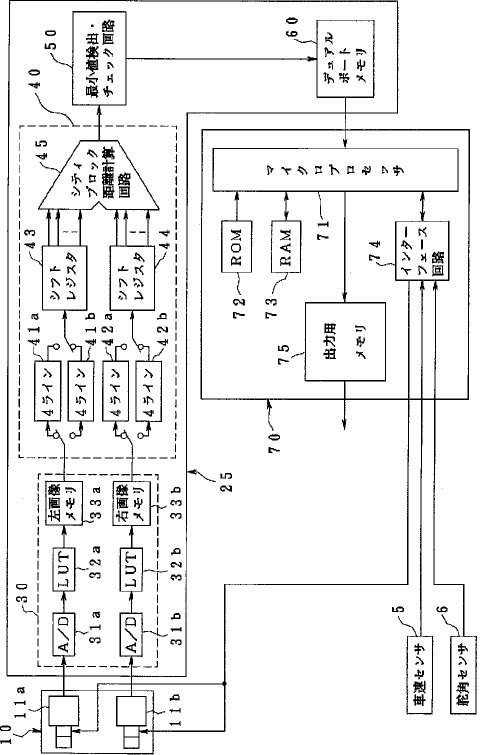
図4は、このシティブロック距離Hを計算する計算回路を備えた車外監視装置1の回路構成例であり、CCDカメラ11a,11bに、左右画像のずれ量を検出するずれ量検出装置25が接続され、このずれ量検出装置25に、マイクロコンピュータからなる情報処理装置70が接続されている。
【0017】前記ずれ量検出装置25は、処理を高速化するため、前記画像処理手段20の距離検出機能を独立した装置にしたものであり、前記情報処理装置70は、前記CCDカメラ11a,11bの焦点距離を設定する焦点距離設定手段15の機能と画像処理手段20における画像認識機能とを合わせ持つものであり、車速に応じてCCDカメラ11a,11bの所定距離を設定し、設定した焦点距離で撮像した画像から前記ずれ量検出装置25によって左右画像のずれ量が検出されると、このずれ量から焦点距離に基づいて実空間の座標に変換し、変換した座標データから道路形状の認識や立体物の認識等を行なう。
【0018】前記ずれ量検出装置25は、前記CCDカメラ11a,11bで撮像したアナログ画像を所定のデジタル画像に変換する画像変換部30、この画像変換部30からの画像データに対し、左右画像の対応する小領域のずれ量δを決定するためのシティブロック距離Hを画素を一つずつずらしながら次々と計算するシティブロック距離計算部40、このシティブロック距離Hの最小値を検出し、得られた最小値が左右小領域の一致を示すものであるか否かをチェックしてずれ量δを決定する最小値検出・チェック回路50、この最小値検出・チェック回路50で決定したずれ量δを保存し、前記情報処理装置70とのインターフェースとなるデュアルポートメモリ60を備えている。
【0019】前記画像変換部30には、左右画像用のCCDカメラ11a,11bに対応して、A/Dコンバータ31a,31bが備えられ、各A/Dコンバータ31a,31bに、それぞれ、低輝度部分に対するコントラスト補正、CCDアンプの固有ゲインの補正を行なうためのルックアップテーブル(LUT)32a,32bが接続され、さらに、各LUT32a,32bに、左画像メモリ33a、右画像メモリ33bがそれぞれ接続されている。
【0020】前記左右画像メモリ33a,33bに記録された画像データは、シティブロック距離計算部40で画像の一部が繰り返し取り出されて処理される。このシティブロック距離計算部40は、前記左画像メモリ33aからの画像データが入力される2組の左画像用入力バッファメモリ41a,41bに、左画像用シフトレジスタ43が接続されるとともに、前記右画像メモリ33bからの画像データが入力される2組の右画像用入力バッファメモリ42a,42bに、右画像用シフトレジスタ44が接続され、各シフトレジスタ43,44がシティブロック距離計算回路45に接続されて構成されている。
【0021】前記各入力バッファメモリ41a,41b,42a,42bは、例えば、シティブロック距離計算の速度に応じた比較的小容量(4ライン分)の入出力が分離した高速タイプであり、また、前記各シフトレジスタ43、44は、それぞれ、例えば2×8段構成のレジスタから構成されている。
【0022】また、シティブロック距離計算回路45は、例えば、加減算器に入出力ラッチをつなげた高速演算器を組み合わせ、ピラミッド状に接続したパイプライン構造となっており、例えば8画素分を同時に入力して計算するようになっている。このピラミッド型構造の初段は、絶対値演算器、2段〜4段は、それぞれ、第1加算器、第2加算器、第3加算器を構成し、最終段は総和加算器となっている。
【0023】また、最小値検出・チェック回路50は、前記シティブロック距離計算回路45の出力と同期してシティブロック距離Hの最小値HMIN及び最大値HMAXを検出し、得られたシティブロック距離Hの最小値HMINが本当に左右小領域の一致を示しているものかどうかチェックを行ない、条件を満たしたもののみ、デュアルポートメモリ60の対応する画素の位置にずれ量δを出力する。
【0024】一方、前記情報処理装置70は、前記デュアルポートメモリ60に書き込まれたずれ量δを読み出して各種の計算処理を行なうマイクロプロセッサ71を中心に構成され、制御プログラムを格納するためのROM72、計算処理途中の各種パラメータを記憶するためのRAM73、インターフェース回路74、処理結果のパラメータを記憶する出力用メモリ75等から構成されており、前記インターフェース回路74には、車輌1に取り付けられた車速センサ5、ステアリングの操舵角を検出する舵角センサ6等が接続されている。
【0025】次に、図5〜図7のフローチャートを中心として実施例の動作について説明する。
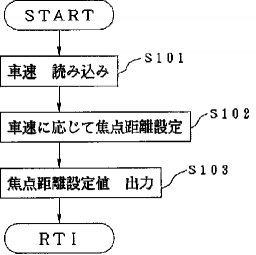
【0026】図5のフローチャートは、焦点距離設定処理のプログラムを示し、例えば、所定サンプリング周期で車外の対象を撮像するため図示しないタイミング信号発生回路から出力されるカメラシャッター信号に同期して所定時間毎に割込み実行され、ステップS101で車速センサ5によって検出された車速をインターフェース回路74を介して読み込む。
【0027】次いで、ステップS102へ進み、読み込んだ車速に応じてCCDカメラ11a,11bの焦点距離を設定する。この焦点距離の設定は、低速域では広い視野を確保するため焦点距離fを小さくし、高速域では遠方を監視するため焦点距離fを大きく設定し、車速に対して連続的あるいは段階的になされ、車速に対して車外の状況を把握するのに最適な画像が得られる焦点距離を、車輌1とCCDカメラ11の位置関係等から、予めROM72にストアした速度−焦点距離変換テーブルを車速に基づき検索することにより、あるいは、計算により求めることで行なう。
【0028】そして、車速に対して適切な焦点距離を設定すると、ステップS103へ進み、この焦点距離の設定値を、インターフェース回路74を介して、CCDカメラ11a,11bにズーム機構の駆動信号として出力するとともに、RAM73の所定アドレスにストアし、割込みを終了する。
【0029】これにより、CCDカメラ11a,11bのズーム機構が駆動され、車速に応じた焦点距離で車外の対象が撮像される。この撮像された画像は、カメラシャッター信号に続いて出力される撮像画像の取込み信号毎に割込み実行される図6のずれ量検出処理のプログラムにおいて左右画像のマッチングが行われ、図7の画像認識処理のプログラムにおいて道路形状や複数の立体物が認識される。
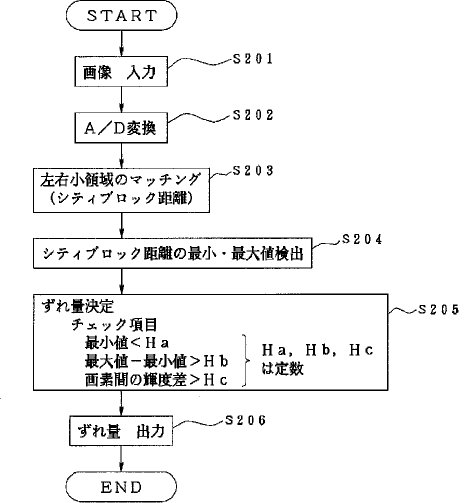
【0030】まず、図6のずれ量検出処理では、ステップS201で、左右のCCDカメラ11a,11bによって撮像した画像を入力すると、ステップS202へ進み、入力したアナログ画像をA/Dコンバータ31a,31bで所定の輝度階調(例えば256階調のグレースケール)を有するデジタル画像に変換する。
【0031】前記各A/Dコンバータ31a,31bによって変換されたデジタル画像は、LUT32a,32bで、低輝度部分のコントラスト増強、左右のCCDカメラ11a,11bの特性補償等が行なわれ、画像メモリ33a,33bに記録される。尚、前記画像メモリ33a,33bに記憶される画像は、CCDカメラ11a,11bのCCD素子の全ラインのうち、その後の処理に必要なラインのみであり、例えば0.1秒に1回の割合(テレビ画像で3枚に1枚の割合)で書き換えられる。
【0032】その後、左右の画像メモリ33a,33bに記録された画像データは、ステップS203で、各画像メモリ33a,33bから例えば4ラインずつ入力バッファメモリ41a,41b,42a,42bへ転送され、左右画像のマッチング、すなわち一致度の評価が行なわれる。
【0033】その際、左右の画像毎に、前記画像メモリ33a,33bから前記入力バッファメモリ41a,41b,42a,42bへの読み込み動作と、シフトレジスタ43,44に対する書き込み動作とが交互に行なわれる。例えば、左画像メモリ33aから一方の入力バッファメモリ41aに画像データが読み込まれている間に、他方の入力バッファメモリ41bからシフトレジスタ43へ読み込んだ画像データの書き出しが行なわれ、右画像メモリ33bから一方の入力バッファメモリ42aに画像データが読み込まれている間に、他方の入力バッファメモリ42bからシフトレジスタ44へ読み込んだ画像データの書き出しが行なわれる。
【0034】そして、各シフトレジスタ43,44は、8段のうちの偶数段の内容を同時にシティブロック距離計算回路45に出力し、シティブロック距離Hの計算が始まると、右画像のデータはシフトレジスタ44内に保持されて、クロック毎に奇数ライン、偶数ラインのデータが交互に出力される。
【0035】一方、左画像のデータはシフトレジスタ43に転送され続け、奇数ライン、偶数ラインのデータが交互に出力されつつ、2クロック毎に1画素分右のほうにずれたデータに置き換わっていく。この動作を、例えば100画素分ずれるまで(200クロック)繰り返し、その後、一つの小領域に対する転送が終了すると、図示しないアドレスカウンタ内の左画像用アドレスカウンタに右画像用アドレスカウンタの内容(次の4×4画素の小領域の先頭アドレス)がセットされ、次の小領域の処理が始まる。シティブロック距離計算回路45では、例えばピラミッド型構造初段の絶対値演算器に8画素分のデータを入力し、左右画像の輝度差の絶対値を計算する。すなわち、右画素の輝度から対応する左画素の輝度を引き算し、結果が負になった場合、演算命令を変えることにより、引く方と引かれる方を逆にして再び引き算を行なうことにより、絶対値の計算を行なう。従って、初段では引き算を2回行なう場合がある。
【0036】次いで、初段を通過すると、2段目から4段目までの第1ないし第3加算器で二つの同時入力データを加算して出力する。そして、最終段の総和加算器で二つの連続するデータを加え合わせて総和を計算し、必要とする16画素分のシティブロック距離Hを2クロック毎に最小値検出・チェック回路50へ出力する。
【0037】次に、ステップS204へ進み、前記ステップS203で算出したシティブロック距離Hの最大値HMAX 、最小値HMIN を最小値検出・チェック回路50で検出する。この最小値検出・チェック回路50では、最初に出力されてきたシティブロック距離H(ずれ量δ=0)と、次のクロックで出力されてきたシティブロック距離H(ずれ量δ=1)とを比較し、比較結果が小のときにのみ、ずれ量δを保存する。そして、この比較演算を繰り返し、計算途中での最大値、最小値及びそのときのずれ量δを保存して、これまでの値の最大値HMAX 、最小値HMIN を更新し、ずれ量δが100になるまで計算を続ける。
【0038】計算が終了すると(最後のシティブロック距離Hが出力されてから1クロック後)、ステップS205で、得られた最小値HMINが本当に左右小領域の一致を示すものであるか否かを、以下の3つの条件によりチェックする。
【0039】(1)HMIN ≦Ha (最小値HMIN がしきい値Ha より大きいときには距離を検出できず。)
(2)HMAX −HMIN ≧Hb (得られた最小値HMIN がノイズによる揺らぎより明らかに低くなっていることをチェックするための条件であり、最小値HMINの近傍の値との差でなく、最大値HMAX と最小値HMINとの差をしきい値Hbと比較してチェックを行なうことにより、曲面などの緩やかに輝度の変わる物体に対しても距離検出が行なえる。)
(3)右画像の小領域内の横方向の隣接画素間の輝度差>Hc (しきい値Hc を大きくするとエッジ検出となるが、輝度が緩やかに変化している場合にも対応可能なように、しきい値Hc は通常のエッジ検出レベルよりはずっと低くしてある。この条件は、輝度変化のない部分では、距離検出が行なえないという基本的な原理に基づいており、小領域中の画素毎に行なわれるため、小領域の中でも実際に距離の検出された画素のみが採用されることになり、自然な結果が得られる。)
すなわち、シティブロック距離Hが最小となるずれ量が求めるずれ量δとなる訳であるが、以上の3つのチェック条件を満足した場合に、ステップS206で、ずれ量δをデュアルポートメモリ60へ出力し、満足しない場合には、データを採用せずに“0”をデュアルポートメモリ60へ出力してずれ量検出装置25における処理を終了する。
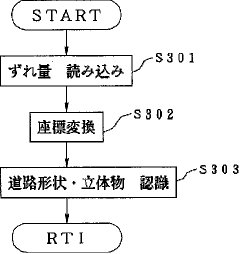
【0040】次に、情報処理装置70では、図7のステップS301で、デュアルポートメモリ60に書き込まれたずれ量δを読み込むと、ステップ302へ進み、RAM73の所定アドレスから読み出した焦点距離の設定値に基づいて、前述の(1)式によりずれ量δから距離Zを算出し、自車(車輌1)を取り巻く実空間の座標系に変換する。
【0041】すなわち、画像上の座標系を、画像左上隅を原点として横方向をi座標軸,縦方向をj座標軸とし、実空間の座標系を車輌1固定の座標系として、原点を2台のCCDカメラ11a,11bの中央の真下の道路面、X軸を車輌1の右側側方、Y軸を車輌1の上方、Z軸を車輌1の前方とすると、画像中の距離情報(i,j,Z)から被写体の三次元位置(X,Y,Z)を、以下の(3),(4)式による座標変換を行なって算出する。
【0042】
Y=CH−Z×PW×(j−JV) (3)
X=r/2+Z×PW×(i−IV) (4)
ここで、 CH :CCDカメラ11の取付け高さPW :1画素当たりの視野角JV,IV:車輌1の真正面の無限遠点の画像上の座標その後、ステップS303へ進み、物体の三次元的な位置座標により、例えば、道路と物体とを道路表面からの高さによって区別し、物体と背景とを距離の値によって区別することにより、道路形状の推定や道路上の物体を認識して、その認識結果を出力用メモリ75に出力し、割込みを終了する。
【0043】これにより、低速域では焦点距離を小さくしてより広い視野を確保して、外界状況を正確に把握することができるとともに、高速域では焦点距離を大きくしてより遠方を監視することができ、障害物をより遠方で検出して走行安全性を向上することができる。
【0044】尚、本実施例では画像処理装置20は、ステレオ法による距離検出に基づく画像認識を行なうものとして説明したが、本発明はこれに限定されるものではなく、画像処理装置20としては、例えば、画像内のエッジ、線分、特殊な形等、何らかの特徴を抽出し、それらの特徴が一致する部分を見つけ出すことにより、車外の対象物までの距離を求め、この距離の情報に基づいて道路形状及び自車輌に対する障害物等を認識するものでも良い。
【0045】
【発明の効果】以上説明したように本発明によれば、車輌の速度に応じて焦点距離が設定されると、この焦点距離の設定値で車外の対象が撮像され、撮像した画像が焦点距離の設定値すなわち撮像時の焦点距離に基づいて処理されるため、撮像時の焦点距離を適切な値として車外監視の際の外界認識率を向上することができる等優れた効果が得られる。
【図面の簡単な説明】
【図1】車外監視装置の全体構成図
【図2】車輌の正面図
【図3】カメラと被写体との関係を示す説明図
【図4】車外監視装置の回路構成図
【図5】焦点距離設定処理のフローチャート
【図6】ずれ量検出処理のフローチャート
【図7】画像認識処理のフローチャート
【符号の説明】
10 撮像手段
15 焦点距離設定手段
20 画像処理手段
【0001】
【産業上の利用分野】本発明は、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置に関する。
【0002】
【従来の技術】従来より、カメラ等の撮像手段を車輌に搭載し、撮像した画像を処理して車外の状態を認識・監視する技術の開発が進められており、例えば、特開平3−225513号公報には、テレビカメラでとらえた進行方向前方の道路帯画像を画像処理して道路情報を抽出し、走行制御を行なう技術が開示されている。
【0003】
【発明が解決しようとする課題】ところで、車外監視の際には、低速ではより広い視野を確保し、高速においてはより遠方を監視することが外界認識率を向上して安全性を高める上で重要であり、車速に応じた適切な焦点距離で車外の対象を撮像し、この撮像時の焦点距離に基づいて画像処理を行なう必要がある。
【0004】本発明は前記事情に鑑みてなされたもので、撮像時の焦点距離を適切な値として車外監視の際の外界認識率を向上することのできる車輌用車外監視装置を提供することを目的としている。
【0005】
【課題を解決するための手段】本発明は、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置において、車輌の速度に応じて撮像の焦点距離を設定し、この焦点距離の設定値を出力する焦点距離設定手段と、所定範囲内で焦点距離を可変可能なズーム機構を有し、前記焦点距離設定手段で設定した焦点距離の設定値で車外の対象を撮像する撮像手段と、前記撮像手段で撮像した画像を、前記焦点距離設定手段で設定した焦点距離の設定値に基づいて処理し、外界情報を得る画像処理手段とを備えたことを特徴とする。
【0006】
【作用】本発明では、焦点距離設定手段で車輌の速度に応じて焦点距離が設定されると、撮像手段のズーム機構が焦点距離の設定値となるよう駆動され、設定した焦点距離で車外の対象が撮像される。そして、撮像した画像が焦点距離の設定値すなわち撮像時の焦点距離に基づいて処理され、外界情報が得られる。
【0007】
【実施例】以下、図面を参照して本発明の実施例を説明する。図面は本発明の一実施例に係わり、図1は車外監視装置の全体構成図、図2は車輌の正面図、図3はカメラと被写体との関係を示す説明図、図4は車外監視装置の回路構成図、図5は焦点距離設定処理のフローチャート、図6はずれ量検出処理のフローチャート、図7は画像認識処理のフローチャートである。
【0008】図1において、符号1は自動車などの車輌であり、この車輌1に、車外の対象を撮像し、撮像した画像を処理して外界情報を得る車外監視装置2が搭載されている。この車外監視装置2は、外部からの入力に応じて焦点距離を所定範囲内で変更するズーム機構を有し、車外の対象を近距離から遠距離に渡って撮像可能な撮像手段10と、この撮像手段10によって撮像した画像を撮像時の焦点距離に基づいて処理し、外界情報を得る画像処理手段20と、車速センサ5で検出した車輌1の車速に応じて適正な焦点距離を設定し、この焦点距離の設定値を前記撮像手段10及び前記画像処理手段20へ出力する焦点距離設定手段15とを備えている。
【0009】前記画像処理手段20で得られる外界情報としては、先ず、車外の対象までの距離情報があり、この距離情報に基づいて道路形状や立体物等の認識が行なわれる。そして、認識した立体物が自車輌に対して障害物となる場合、図示しないアクチュエータ類を制御する外部装置を接続することにより、運転者に対する警告、自動衝突回避等の動作を行なうことが可能となる。
【0010】本実施例は、車外の対象を異なる位置から撮像した1組の画像に対し、対応する位置のずれ量から三角測量の原理によって距離を求める、いわゆるステレオ法による画像処理で距離情報を得るものであり、前記撮像手段10は、左右画像用として、例えば電荷結合素子(CCD)等の固体撮像素子を用いた2台のカメラにより構成されている。
【0011】すなわち、図2に示すように、ズーム機構付きCCDカメラ11a,11b(代表してCCDカメラ11と表記する場合もある)が、それぞれ車室内の天井前方に一定の間隔をもって取り付けられ、車室内のCCDカメラ11の取付位置を、例えば、車輌1のボンネット先端から2mとすると、例えば、直近から100m遠方までを撮像する場合、実際には前方2mから100mまでの位置を撮像することになる。
【0012】この場合、図3に示すように、2台のCCDカメラ11a、11bの取付間隔をrとして、2台のカメラ11a,11bの設置面から距離Zにある点Pを撮影すると、2台のカメラ11a,11bの焦点距離を共にfとして、点Pの像は、それぞれのカメラについて焦点位置からfだけ離れた投影面に写る。
【0013】このとき、右のCCDカメラ11bにおける像の位置から左のCCDカメラ11aにおける像の位置までの距離は、r+δとなり、このδをずれ量とすると、点Pまでの距離Zは、ずれ量δから以下の式で求めることができる。
【0014】
Z=r・f/δ (1)
この左右画像のずれ量δを検出するには、左右画像における同一物体の像を見つけ出す必要があり、前記画像処理装置20では、画像を小領域に分割し、それぞれの小領域内の輝度あるいは色のパターンを左右画像で比較して一致する領域を見つけ出し、全画面に渡って距離分布を求める。
【0015】左右画像の一致度は、右画像、左画像のi番目画素の輝度(色を用いても良い)を、それぞれ、Ai、Biとすると、例えば、以下の(2)式に示すシティブロック距離Hによって評価することができる。
【0016】
H=Σ|Ai−Bi| (2)
図4は、このシティブロック距離Hを計算する計算回路を備えた車外監視装置1の回路構成例であり、CCDカメラ11a,11bに、左右画像のずれ量を検出するずれ量検出装置25が接続され、このずれ量検出装置25に、マイクロコンピュータからなる情報処理装置70が接続されている。
【0017】前記ずれ量検出装置25は、処理を高速化するため、前記画像処理手段20の距離検出機能を独立した装置にしたものであり、前記情報処理装置70は、前記CCDカメラ11a,11bの焦点距離を設定する焦点距離設定手段15の機能と画像処理手段20における画像認識機能とを合わせ持つものであり、車速に応じてCCDカメラ11a,11bの所定距離を設定し、設定した焦点距離で撮像した画像から前記ずれ量検出装置25によって左右画像のずれ量が検出されると、このずれ量から焦点距離に基づいて実空間の座標に変換し、変換した座標データから道路形状の認識や立体物の認識等を行なう。
【0018】前記ずれ量検出装置25は、前記CCDカメラ11a,11bで撮像したアナログ画像を所定のデジタル画像に変換する画像変換部30、この画像変換部30からの画像データに対し、左右画像の対応する小領域のずれ量δを決定するためのシティブロック距離Hを画素を一つずつずらしながら次々と計算するシティブロック距離計算部40、このシティブロック距離Hの最小値を検出し、得られた最小値が左右小領域の一致を示すものであるか否かをチェックしてずれ量δを決定する最小値検出・チェック回路50、この最小値検出・チェック回路50で決定したずれ量δを保存し、前記情報処理装置70とのインターフェースとなるデュアルポートメモリ60を備えている。
【0019】前記画像変換部30には、左右画像用のCCDカメラ11a,11bに対応して、A/Dコンバータ31a,31bが備えられ、各A/Dコンバータ31a,31bに、それぞれ、低輝度部分に対するコントラスト補正、CCDアンプの固有ゲインの補正を行なうためのルックアップテーブル(LUT)32a,32bが接続され、さらに、各LUT32a,32bに、左画像メモリ33a、右画像メモリ33bがそれぞれ接続されている。
【0020】前記左右画像メモリ33a,33bに記録された画像データは、シティブロック距離計算部40で画像の一部が繰り返し取り出されて処理される。このシティブロック距離計算部40は、前記左画像メモリ33aからの画像データが入力される2組の左画像用入力バッファメモリ41a,41bに、左画像用シフトレジスタ43が接続されるとともに、前記右画像メモリ33bからの画像データが入力される2組の右画像用入力バッファメモリ42a,42bに、右画像用シフトレジスタ44が接続され、各シフトレジスタ43,44がシティブロック距離計算回路45に接続されて構成されている。
【0021】前記各入力バッファメモリ41a,41b,42a,42bは、例えば、シティブロック距離計算の速度に応じた比較的小容量(4ライン分)の入出力が分離した高速タイプであり、また、前記各シフトレジスタ43、44は、それぞれ、例えば2×8段構成のレジスタから構成されている。
【0022】また、シティブロック距離計算回路45は、例えば、加減算器に入出力ラッチをつなげた高速演算器を組み合わせ、ピラミッド状に接続したパイプライン構造となっており、例えば8画素分を同時に入力して計算するようになっている。このピラミッド型構造の初段は、絶対値演算器、2段〜4段は、それぞれ、第1加算器、第2加算器、第3加算器を構成し、最終段は総和加算器となっている。
【0023】また、最小値検出・チェック回路50は、前記シティブロック距離計算回路45の出力と同期してシティブロック距離Hの最小値HMIN及び最大値HMAXを検出し、得られたシティブロック距離Hの最小値HMINが本当に左右小領域の一致を示しているものかどうかチェックを行ない、条件を満たしたもののみ、デュアルポートメモリ60の対応する画素の位置にずれ量δを出力する。
【0024】一方、前記情報処理装置70は、前記デュアルポートメモリ60に書き込まれたずれ量δを読み出して各種の計算処理を行なうマイクロプロセッサ71を中心に構成され、制御プログラムを格納するためのROM72、計算処理途中の各種パラメータを記憶するためのRAM73、インターフェース回路74、処理結果のパラメータを記憶する出力用メモリ75等から構成されており、前記インターフェース回路74には、車輌1に取り付けられた車速センサ5、ステアリングの操舵角を検出する舵角センサ6等が接続されている。
【0025】次に、図5〜図7のフローチャートを中心として実施例の動作について説明する。
【0026】図5のフローチャートは、焦点距離設定処理のプログラムを示し、例えば、所定サンプリング周期で車外の対象を撮像するため図示しないタイミング信号発生回路から出力されるカメラシャッター信号に同期して所定時間毎に割込み実行され、ステップS101で車速センサ5によって検出された車速をインターフェース回路74を介して読み込む。
【0027】次いで、ステップS102へ進み、読み込んだ車速に応じてCCDカメラ11a,11bの焦点距離を設定する。この焦点距離の設定は、低速域では広い視野を確保するため焦点距離fを小さくし、高速域では遠方を監視するため焦点距離fを大きく設定し、車速に対して連続的あるいは段階的になされ、車速に対して車外の状況を把握するのに最適な画像が得られる焦点距離を、車輌1とCCDカメラ11の位置関係等から、予めROM72にストアした速度−焦点距離変換テーブルを車速に基づき検索することにより、あるいは、計算により求めることで行なう。
【0028】そして、車速に対して適切な焦点距離を設定すると、ステップS103へ進み、この焦点距離の設定値を、インターフェース回路74を介して、CCDカメラ11a,11bにズーム機構の駆動信号として出力するとともに、RAM73の所定アドレスにストアし、割込みを終了する。
【0029】これにより、CCDカメラ11a,11bのズーム機構が駆動され、車速に応じた焦点距離で車外の対象が撮像される。この撮像された画像は、カメラシャッター信号に続いて出力される撮像画像の取込み信号毎に割込み実行される図6のずれ量検出処理のプログラムにおいて左右画像のマッチングが行われ、図7の画像認識処理のプログラムにおいて道路形状や複数の立体物が認識される。
【0030】まず、図6のずれ量検出処理では、ステップS201で、左右のCCDカメラ11a,11bによって撮像した画像を入力すると、ステップS202へ進み、入力したアナログ画像をA/Dコンバータ31a,31bで所定の輝度階調(例えば256階調のグレースケール)を有するデジタル画像に変換する。
【0031】前記各A/Dコンバータ31a,31bによって変換されたデジタル画像は、LUT32a,32bで、低輝度部分のコントラスト増強、左右のCCDカメラ11a,11bの特性補償等が行なわれ、画像メモリ33a,33bに記録される。尚、前記画像メモリ33a,33bに記憶される画像は、CCDカメラ11a,11bのCCD素子の全ラインのうち、その後の処理に必要なラインのみであり、例えば0.1秒に1回の割合(テレビ画像で3枚に1枚の割合)で書き換えられる。
【0032】その後、左右の画像メモリ33a,33bに記録された画像データは、ステップS203で、各画像メモリ33a,33bから例えば4ラインずつ入力バッファメモリ41a,41b,42a,42bへ転送され、左右画像のマッチング、すなわち一致度の評価が行なわれる。
【0033】その際、左右の画像毎に、前記画像メモリ33a,33bから前記入力バッファメモリ41a,41b,42a,42bへの読み込み動作と、シフトレジスタ43,44に対する書き込み動作とが交互に行なわれる。例えば、左画像メモリ33aから一方の入力バッファメモリ41aに画像データが読み込まれている間に、他方の入力バッファメモリ41bからシフトレジスタ43へ読み込んだ画像データの書き出しが行なわれ、右画像メモリ33bから一方の入力バッファメモリ42aに画像データが読み込まれている間に、他方の入力バッファメモリ42bからシフトレジスタ44へ読み込んだ画像データの書き出しが行なわれる。
【0034】そして、各シフトレジスタ43,44は、8段のうちの偶数段の内容を同時にシティブロック距離計算回路45に出力し、シティブロック距離Hの計算が始まると、右画像のデータはシフトレジスタ44内に保持されて、クロック毎に奇数ライン、偶数ラインのデータが交互に出力される。
【0035】一方、左画像のデータはシフトレジスタ43に転送され続け、奇数ライン、偶数ラインのデータが交互に出力されつつ、2クロック毎に1画素分右のほうにずれたデータに置き換わっていく。この動作を、例えば100画素分ずれるまで(200クロック)繰り返し、その後、一つの小領域に対する転送が終了すると、図示しないアドレスカウンタ内の左画像用アドレスカウンタに右画像用アドレスカウンタの内容(次の4×4画素の小領域の先頭アドレス)がセットされ、次の小領域の処理が始まる。シティブロック距離計算回路45では、例えばピラミッド型構造初段の絶対値演算器に8画素分のデータを入力し、左右画像の輝度差の絶対値を計算する。すなわち、右画素の輝度から対応する左画素の輝度を引き算し、結果が負になった場合、演算命令を変えることにより、引く方と引かれる方を逆にして再び引き算を行なうことにより、絶対値の計算を行なう。従って、初段では引き算を2回行なう場合がある。
【0036】次いで、初段を通過すると、2段目から4段目までの第1ないし第3加算器で二つの同時入力データを加算して出力する。そして、最終段の総和加算器で二つの連続するデータを加え合わせて総和を計算し、必要とする16画素分のシティブロック距離Hを2クロック毎に最小値検出・チェック回路50へ出力する。
【0037】次に、ステップS204へ進み、前記ステップS203で算出したシティブロック距離Hの最大値HMAX 、最小値HMIN を最小値検出・チェック回路50で検出する。この最小値検出・チェック回路50では、最初に出力されてきたシティブロック距離H(ずれ量δ=0)と、次のクロックで出力されてきたシティブロック距離H(ずれ量δ=1)とを比較し、比較結果が小のときにのみ、ずれ量δを保存する。そして、この比較演算を繰り返し、計算途中での最大値、最小値及びそのときのずれ量δを保存して、これまでの値の最大値HMAX 、最小値HMIN を更新し、ずれ量δが100になるまで計算を続ける。
【0038】計算が終了すると(最後のシティブロック距離Hが出力されてから1クロック後)、ステップS205で、得られた最小値HMINが本当に左右小領域の一致を示すものであるか否かを、以下の3つの条件によりチェックする。
【0039】(1)HMIN ≦Ha (最小値HMIN がしきい値Ha より大きいときには距離を検出できず。)
(2)HMAX −HMIN ≧Hb (得られた最小値HMIN がノイズによる揺らぎより明らかに低くなっていることをチェックするための条件であり、最小値HMINの近傍の値との差でなく、最大値HMAX と最小値HMINとの差をしきい値Hbと比較してチェックを行なうことにより、曲面などの緩やかに輝度の変わる物体に対しても距離検出が行なえる。)
(3)右画像の小領域内の横方向の隣接画素間の輝度差>Hc (しきい値Hc を大きくするとエッジ検出となるが、輝度が緩やかに変化している場合にも対応可能なように、しきい値Hc は通常のエッジ検出レベルよりはずっと低くしてある。この条件は、輝度変化のない部分では、距離検出が行なえないという基本的な原理に基づいており、小領域中の画素毎に行なわれるため、小領域の中でも実際に距離の検出された画素のみが採用されることになり、自然な結果が得られる。)
すなわち、シティブロック距離Hが最小となるずれ量が求めるずれ量δとなる訳であるが、以上の3つのチェック条件を満足した場合に、ステップS206で、ずれ量δをデュアルポートメモリ60へ出力し、満足しない場合には、データを採用せずに“0”をデュアルポートメモリ60へ出力してずれ量検出装置25における処理を終了する。
【0040】次に、情報処理装置70では、図7のステップS301で、デュアルポートメモリ60に書き込まれたずれ量δを読み込むと、ステップ302へ進み、RAM73の所定アドレスから読み出した焦点距離の設定値に基づいて、前述の(1)式によりずれ量δから距離Zを算出し、自車(車輌1)を取り巻く実空間の座標系に変換する。
【0041】すなわち、画像上の座標系を、画像左上隅を原点として横方向をi座標軸,縦方向をj座標軸とし、実空間の座標系を車輌1固定の座標系として、原点を2台のCCDカメラ11a,11bの中央の真下の道路面、X軸を車輌1の右側側方、Y軸を車輌1の上方、Z軸を車輌1の前方とすると、画像中の距離情報(i,j,Z)から被写体の三次元位置(X,Y,Z)を、以下の(3),(4)式による座標変換を行なって算出する。
【0042】
Y=CH−Z×PW×(j−JV) (3)
X=r/2+Z×PW×(i−IV) (4)
ここで、 CH :CCDカメラ11の取付け高さPW :1画素当たりの視野角JV,IV:車輌1の真正面の無限遠点の画像上の座標その後、ステップS303へ進み、物体の三次元的な位置座標により、例えば、道路と物体とを道路表面からの高さによって区別し、物体と背景とを距離の値によって区別することにより、道路形状の推定や道路上の物体を認識して、その認識結果を出力用メモリ75に出力し、割込みを終了する。
【0043】これにより、低速域では焦点距離を小さくしてより広い視野を確保して、外界状況を正確に把握することができるとともに、高速域では焦点距離を大きくしてより遠方を監視することができ、障害物をより遠方で検出して走行安全性を向上することができる。
【0044】尚、本実施例では画像処理装置20は、ステレオ法による距離検出に基づく画像認識を行なうものとして説明したが、本発明はこれに限定されるものではなく、画像処理装置20としては、例えば、画像内のエッジ、線分、特殊な形等、何らかの特徴を抽出し、それらの特徴が一致する部分を見つけ出すことにより、車外の対象物までの距離を求め、この距離の情報に基づいて道路形状及び自車輌に対する障害物等を認識するものでも良い。
【0045】
【発明の効果】以上説明したように本発明によれば、車輌の速度に応じて焦点距離が設定されると、この焦点距離の設定値で車外の対象が撮像され、撮像した画像が焦点距離の設定値すなわち撮像時の焦点距離に基づいて処理されるため、撮像時の焦点距離を適切な値として車外監視の際の外界認識率を向上することができる等優れた効果が得られる。
【図面の簡単な説明】
【図1】車外監視装置の全体構成図
【図2】車輌の正面図
【図3】カメラと被写体との関係を示す説明図
【図4】車外監視装置の回路構成図
【図5】焦点距離設定処理のフローチャート
【図6】ずれ量検出処理のフローチャート
【図7】画像認識処理のフローチャート
【符号の説明】
10 撮像手段
15 焦点距離設定手段
20 画像処理手段
【特許請求の範囲】
【請求項1】 車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置において、車輌の速度に応じて撮像の焦点距離を設定し、この焦点距離の設定値を出力する焦点距離設定手段(15)と、所定範囲内で焦点距離を可変可能なズーム機構を有し、前記焦点距離設定手段(15)で設定した焦点距離の設定値で車外の対象を撮像する撮像手段(10)と、前記撮像手段(10)で撮像した画像を、前記焦点距離設定手段(15)で設定した焦点距離の設定値に基づいて処理し、外界情報を得る画像処理手段(20)とを備えたことを特徴とする車輌用車外監視装置。
【請求項1】 車外の対象を撮像し、撮像した画像を処理して外界情報を得る車輌用車外監視装置において、車輌の速度に応じて撮像の焦点距離を設定し、この焦点距離の設定値を出力する焦点距離設定手段(15)と、所定範囲内で焦点距離を可変可能なズーム機構を有し、前記焦点距離設定手段(15)で設定した焦点距離の設定値で車外の対象を撮像する撮像手段(10)と、前記撮像手段(10)で撮像した画像を、前記焦点距離設定手段(15)で設定した焦点距離の設定値に基づいて処理し、外界情報を得る画像処理手段(20)とを備えたことを特徴とする車輌用車外監視装置。
【図1】


【図2】
【図3】
【図5】
【図7】
【図4】
【図6】
【図2】
【図3】
【図5】
【図7】
【図4】
【図6】
【公開番号】特開平7−121795
【公開日】平成7年(1995)5月12日
【国際特許分類】
【出願番号】特願平5−262563
【出願日】平成5年(1993)10月20日
【出願人】(000005348)富士重工業株式会社 (3,010)
【公開日】平成7年(1995)5月12日
【国際特許分類】
【出願日】平成5年(1993)10月20日
【出願人】(000005348)富士重工業株式会社 (3,010)
[ Back to top ]