
車輪位置判定装置
【課題】安価な構成で車輪の左右位置を判定することができる車輪位置判定装置を提供すること。
【解決手段】各タイヤセンサユニット3は、車両の発進中の加速に伴う基板21のひずみを検出し、そのひずみに応じたデータ信号を発生するひずみセンサ20と、データ信号を無線送信する送信アンテナ19とを有する。受信機ユニットの受信機ユニットコントローラは、受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が車両の左側の車輪に設けられたタイヤセンサユニット3から送信されたデータ信号であるのか、右側の車輪に設けられたタイヤセンサユニット3から送信されたデータ信号であるのかを判定する。
【解決手段】各タイヤセンサユニット3は、車両の発進中の加速に伴う基板21のひずみを検出し、そのひずみに応じたデータ信号を発生するひずみセンサ20と、データ信号を無線送信する送信アンテナ19とを有する。受信機ユニットの受信機ユニットコントローラは、受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が車両の左側の車輪に設けられたタイヤセンサユニット3から送信されたデータ信号であるのか、右側の車輪に設けられたタイヤセンサユニット3から送信されたデータ信号であるのかを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に設けられた複数の車輪の左右位置を判定するための車輪位置判定装置に関し、特にタイヤ状態監視装置に用いるのに好適な車輪位置判定装置に関する。
【背景技術】
【0002】
例えば、特許文献1には、車両に設けられた複数のタイヤの状態を運転者が車室内で確認できるようにするための装置として、無線方式のタイヤ状態監視装置が提案されている。特許文献1に記載されたタイヤ状態監視装置は、車両の車輪にそれぞれ装着される複数の送信機と、車両の車体に搭載される受信機とを備えている。各送信機は、対応するタイヤの状態、即ちタイヤ内の圧力や温度を検出し、検出されたタイヤの状態を示すデータを含むデータ信号を無線送信する。一方、受信機は、各送信機からのデータ信号を受信アンテナを通じて受信して、タイヤ状態に関する情報を、車室内に設けられた表示器に必要に応じて表示させる。また、受信機は、4つの送信機それぞれに対応するように4つの発信機を備えている。そして、各発信機からトリガ信号が無線送信され、送信機が対応する発信機からのトリガ信号を検出するとタイヤ状態を検出する。
【0003】
上記のようなタイヤ状態監視装置では、受信されたデータ信号が複数のタイヤのうちのどのタイヤに設けられた送信機から発信されたものであるのかを、言い換えれば、受信されたデータ信号に関連するタイヤ(車輪)の位置を、受信機において判定できるようにするのが望ましい。そこで、上記特許文献1では、各送信機はそれぞれ角加速度センサを備える。そして、車両の加速時、送信機における角加速度センサの出力する角加速度値は、左側のタイヤと右側のタイヤとで極性が異なることから、各送信機のコントローラは、角加速度センサからの角加速度データに基づいて、自身が左側か右側のタイヤに設けられたかを判定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−262324号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1においては、タイヤ状態を検出するために、各送信機それぞれに対応して4つの発信機を必要とし、タイヤ状態監視装置のコストが嵩んでしまう。
本発明の目的は、安価な構成で車輪の左右位置を判定することができる車輪位置判定装置を提供することにある。
【課題を解決するための手段】
【0006】
上記問題点を解決するために、請求項1に記載の発明は、車両に設けられた複数の車輪の位置を判定するための車輪位置判定装置であって、前記車輪それぞれに設けられる車輪側ユニット、及び前記車両の車体に設置される受信機ユニットを備え、前記各車輪側ユニットは、前記車両の加速又は減速に伴う被測定物のひずみを検出し、該ひずみに応じたデータ信号を発生するひずみセンサと、前記データ信号を無線送信する送信部とを有し、前記受信機ユニットは、前記各車輪側ユニットから送信されるデータ信号を受信アンテナを通じて受信する受信部と、受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が前記車両の左側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのか、右側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのかを判定する車輪位置判定部と、を有する。
【0007】
これによれば、車両の加速時又は減速時には、車輪の周方向への加速又は減速によって被測定物には、加速又は減速によるひずみが発生する。左側の車輪と右側の車輪とでは、回転方向が逆となることから、ひずみの値も左側の車輪と右側の車輪とで値が逆となり、ひずみセンサから発生するデータ信号に違いが生じる。そして、このひずみの値の違いに基づいて車輪位置判定部は、データ信号が送信された車輪側ユニットが、左側の車輪に設けられたものか、右側の車輪に設けられたものかを判定することができる。車輪位置判定部により、車輪の左右位置を判定することができれば、受信機ユニットにより各位置の車輪の状態を把握することができる。したがって、本発明によれば、背景技術のように、受信機ユニットに、各車輪側ユニットそれぞれに対応して発信機を必要としなくても、車輪の状態を検出・把握することができ、各車輪それぞれに対応して発信機を必要とする場合と比較して車輪位置判定装置を安価にすることができる。
【0008】
また、前記各車輪側ユニットは、前記車輪と共に回転して遠心加速度を反映したデータ信号を発生する加速度センサを備え、前記車輪位置判定部は、前記遠心加速度がゼロから変化しつつあることを契機に前記車両が発進状態にあるか否か、又は前記遠心加速度がゼロに変化しつつあることを契機に前記車両が停止中状態にあるか否かを判定し、前記車両が前記発進状態又は前記停止中状態にあると判定した場合に、前記ひずみセンサの前記データ信号に基づき前記車輪の左右位置を判定してもよい。
【0009】
これによれば、車両が定速走行状態にあるときは、ひずみセンサによって検出されるひずみの値は、左側の車輪と右側の車輪とでほぼ同じになり、車輪位置判定部では、ひずみの違いに基づいて車輪の左右位置が判定しにくくなる。加速度センサで遠心加速度がゼロから変化するとき、又は遠心加速度がゼロに変化するときの車両の状態は、定速走行状態ではなく発進状態又は停止中状態である。このため、加速度センサを用いることで、車両が発進状態又は停止中状態にあることを判定することができ、左側の車輪と右側の車輪とでひずみの値が異なる発進状態又は停止中状態にあるときに、車輪の左右位置を判定することができる。その結果として、定速走行中に、車輪位置判定部が車輪の左右位置を判定しようとして判定不能になるといった、無駄な判定処理を行ってしまうことを無くすことができる。
【0010】
前記被測定物は、前記車輪側ユニットの基板であってもよい。
これによれば、ひずみセンサは、車輪側ユニット内に収納されているため、車輪側ユニットの体格を大型化することなく車輪の左右位置を判定することができる。
【発明の効果】
【0011】
本発明によれば、安価な構成で車輪の左右位置を判定することができる。
【図面の簡単な説明】
【0012】
【図1】実施形態のタイヤ状態監視装置が搭載された車両を示す概略構成図。
【図2】図1のタイヤセンサユニットの回路構成を示すブロック図。
【図3】タイヤセンサユニットの配置を示すため車輪を部分破断して示す図。
【発明を実施するための形態】
【0013】
以下に、本発明の車輪位置判定装置をタイヤ状態監視装置に具体化した一実施形態について、図1〜図3を参照して説明する。
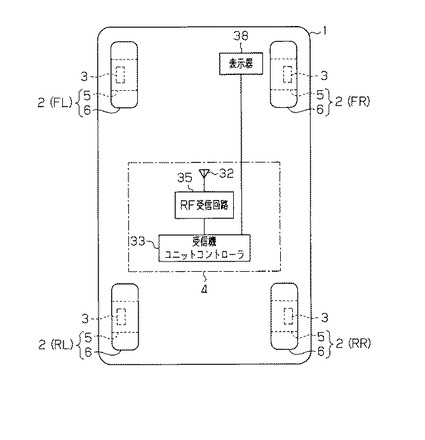
図1に示すように、タイヤ状態監視装置は、車両1の4つの車輪2にそれぞれ取り付けられる4つのタイヤセンサユニット3と、車両1の車体に設置される受信機ユニット4とを備えている。各車輪2は、ホイール部5と、このホイール部5に装着されるタイヤ6とを含む。なお以後、適宜に、前側左側の車輪2を符号FLで示し、前側右側の車輪2を符号FRで示し、後側左側の車輪2を符号RLで示し、後側右側の車輪2を符号RRで示す。
【0014】
車輪側ユニットとしての各タイヤセンサユニット3は、タイヤ6の内部空間に配置されるように、そのタイヤ6が装着されたホイール部5に対して取り付けられている。各タイヤセンサユニット3は、対応するタイヤ6の状態(タイヤ内圧力、タイヤ内温度)を検出して、検出されたタイヤ状態を示すデータを含む信号、即ちタイヤ状態データ信号(以下、データ信号と称する)を無線送信する。
【0015】
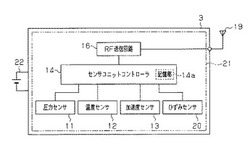
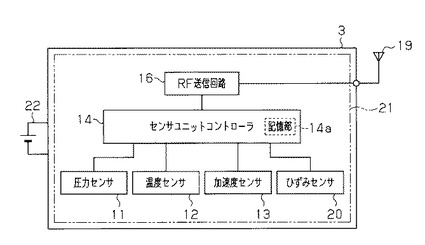
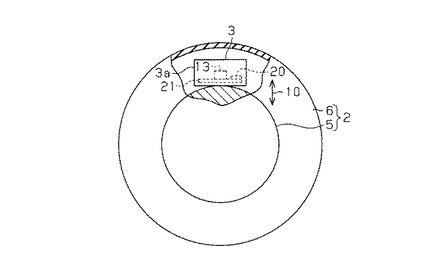
図3に示すように、各タイヤセンサユニット3において、そのケース3a内には基板21が収納されるとともに、図2に示すように、基板21には、圧力センサ11、温度センサ12、加速度センサ13、ひずみセンサ20、センサユニットコントローラ14、及び、送信部としてのRF送信回路16が設けられている。圧力センサ11、温度センサ12、加速度センサ13、ひずみセンサ20、センサユニットコントローラ14、及びRF送信回路16は、タイヤセンサユニット3に内蔵された電池22から供給される電力によって駆動される。
【0016】
圧力センサ11は、対応するタイヤ6内の圧力(内部空気圧)を検出して、その検出によって得られたタイヤ内圧力データをセンサユニットコントローラ14に出力する。温度センサ12は、対応するタイヤ6内の温度(内部空気温度)を検出して、その検出によって得られたタイヤ内温度データをセンサユニットコントローラ14に出力する。
【0017】
加速度センサ13は、例えば、ピエゾ抵抗型や静電容量型の加速度センサとして周知のものであり、本実施形態では、加速度センサ13として1軸の加速度センサ、すなわち一つの検出軸に沿った方向の加速度成分を検出可能な加速度センサが用いられる。図3に示すように、加速度センサ13は、加速度の検出方向(すなわち、検出軸)10が車輪2の径方向と一致するように、基板21に配置される。
【0018】
そして、加速度センサ13は、対応する車輪2の加速度を検出して、その検出によって得られたタイヤ加速度データをセンサユニットコントローラ14に出力する。例えば、車輪2は、車両1の発進時や加速時には、値が増加する加速度データを、車両1の停止時や減速時には、値が減少する加速度データを、それぞれセンサユニットコントローラ14に出力する。
【0019】
図2に示すように、センサユニットコントローラ14は、CPU及び記憶部14a(RAMやROM等)を含むマイクロコンピュータ等よりなり、記憶部14aには各タイヤセンサユニット3に固有の識別情報であるIDコードが登録されている。このIDコードは、各タイヤセンサユニット3を受信機ユニット4において識別するために使用される情報であり、センサユニットコントローラ14からの送信信号に含められる。センサユニットコントローラ14は、タイヤ内圧力データ、タイヤ内温度データ、タイヤ加速度データ、及びIDコードを含むデータを、RF送信回路16に出力する。RF送信回路16は、センサユニットコントローラ14からのデータを変調して変調信号を生成し、変調信号を送信アンテナ19から無線送信する。
【0020】
各タイヤセンサユニット3は、例えば、タイヤ状態の計測動作を第1の所定時間間隔(例えば、1〜15秒間隔)で定期的に行う一方、データ信号の送信動作を、第1の所定時間間隔よりも長い第2の所定時間間隔(例えば、1分間隔)で定期的に行う。なお、加速度センサ13の加速度データがある閾値を越えたときは、第2の所定時間間隔より短い間隔で送信動作を行ってもよい。すなわち、車両1の走行状態と停止状態で、それぞれ第2の所定時間間隔を変えて送信動作を行ってもよい。但し、計測されたタイヤ状態が異常を示す場合(例えば、タイヤ内圧力の異常低下、タイヤ内圧力の急変、タイヤ内温度の急変等)、タイヤセンサユニット3は定期的な送信動作とは関係無く、直ちに送信動作を行う。
【0021】
図1に示すように、受信機ユニット4は、車体の所定箇所に設置され、例えば車両1のバッテリ(図示せず)からの電力によって動作する。受信機ユニット4は、車体の任意の箇所に配置された受信アンテナ32を備えており、各タイヤセンサユニット3から受信アンテナ32を通じてデータ信号を受信して、その受信した信号を処理する。本実施形態において、受信アンテナ32は、車両1の前後方向において、前側の車輪2と後側の車輪2との間のほぼ中間位置に配置されている。
【0022】
受信機ユニット4は、車輪位置判定部としての受信機ユニットコントローラ33を備えるとともに、受信部としてのRF受信回路35を備えている。受信機ユニット4の受信機ユニットコントローラ33には、表示器38が有線接続されている。受信機ユニットコントローラ33はCPU及び記憶部(ROMやRAM等)を含むマイクロコンピュータ等よりなり、受信機ユニット4の動作を統括的に制御する。RF受信回路35は、各タイヤセンサユニット3から受信アンテナ32を通じて受信された変調信号を復調して、受信機ユニットコントローラ33に送る。受信機ユニットコントローラ33は、RF受信回路35からのデータ信号に基づき、送信元のタイヤセンサユニット3に対応するタイヤ6の内部空気圧及び内部温度を把握する。
【0023】
さらには、受信機ユニットコントローラ33は、RF受信回路35からのデータ信号に基づき、送信元のタイヤセンサユニット3が、車両1の左側の車輪2(FL,RL)に設けられたものであるのか、右側の車輪2(FR,RR)に設けられたものであるかを判定する。
【0024】
受信機ユニットコントローラ33は、内部空気圧及び内部温度に関する情報等を表示器38に表示させる。表示器38は、車室内等、車両1の搭乗者の視認範囲に配置され、受信機ユニットコントローラ33により表示器38にはタイヤ内圧力やタイヤ内温度の異常が表示(報知)される。
【0025】
図2及び図3に示すように、タイヤセンサユニット3の基板21に設けられたひずみセンサ20は、例えば、薄い絶縁体上にジグザグ形状にレイアウトされた金属の抵抗体(金属箔)が取り付けられた構造をしたものであり、被測定物、本実施形態では基板21に貼着されて使用される。そして、ひずみセンサ20は、基板21が変形すると、抵抗体が、伸びにより断面積が減るとともに長さが長くなり、その抵抗体の抵抗値が増える(ピエゾ抵抗効果)ことを検出することで、基板21のひずみを検出する。本実施形態では、素子が1つの単軸型のひずみセンサ20が用いられる。
【0026】
ひずみセンサ20は、抵抗値の変化に応じたデータ信号を発生してセンサユニットコントローラ14に出力する。なお、抵抗値の変化は微小であるため、ひずみセンサ20にはブリッジ回路・増幅回路(図示せず)が接続され、これらの回路によってデータ信号として出力される。
【0027】
本実施形態では、ひずみセンサ20はタイヤセンサユニット3の基板21に貼着されて、そのタイヤセンサユニット3がホイール部5に取り付けられることにより車輪2に設けられている。そして、車両1の発進時の加速や停止時や減速の際には、その加減速によって基板21には応力が発生し、ひずみが発生する(変形する)。すると、基板21に貼着されたひずみセンサ20は、基板21のひずみを検出し、データ信号をセンサユニットコントローラ14に出力する。
【0028】
具体的には、例えば前側左側(FL)の車輪2に設けられたひずみセンサ20は、車両1の加速時には車輪2の接線加速方向と逆方向に正のひずみデータを、車両1の減速時には加速時と逆に負のひずみデータを、それぞれセンサユニットコントローラ14に出力する。一方、前側右側(FR)の車輪2は、前側左側(FL)の車輪2とは、逆方向に回転する。このため、前側右側(FR)の車輪2に設けられたひずみセンサ20は、車両1の加速時には、前側左側(FL)の車輪2と逆に負のひずみデータを、車両1の減速時には、前側左側(FL)の車輪2と逆に正のひずみデータを、それぞれセンサユニットコントローラ14に出力する。なお、後側左側(RL)の車輪2、及び後側右側(RR)の車輪2についても同様である。
【0029】
次に、タイヤ状態監視装置の作用について説明する。
車両1の発進時、車輪2が回転し始めると、前側左側(FL)及び前側右側(FR)の車輪2に設けられたタイヤセンサユニット3がそれぞれ回転し、それまでゼロであった遠心加速度が各加速度センサ13によって検出される。そして、各加速度センサ13は、遠心加速度を検出するとともに、その検出によって得られたタイヤ加速度データを反映したデータ信号をセンサユニットコントローラ14に出力する。
【0030】
また、前側左側(FL)の車輪2に設けられたタイヤセンサユニット3が回転し、基板21に応力が発生すると、左側のひずみセンサ20は正のひずみデータを検出し、センサユニットコントローラ14に出力する。一方、前側右側(FR)の車輪2に設けられたタイヤセンサユニット3が回転し、基板21に応力が発生すると、右側のひずみセンサ20は負のひずみデータを検出し、センサユニットコントローラ14に出力する。センサユニットコントローラ14は、タイヤ加速度データ、及びひずみデータを含むデータ信号をRF受信回路35に送信する。
【0031】
RF受信回路35は、各タイヤセンサユニット3から受信アンテナ32を通じて受信された変調信号を復調して、受信機ユニットコントローラ33に送る。そして、受信機ユニットコントローラ33は、タイヤ加速度データに基づき、遠心加速度がゼロから変化しつつあることから車両1が発進時であると判定する。さらに、受信機ユニットコントローラ33は、ひずみデータの極性の違い(正か負)に基づいて、それらデータ信号が左側のタイヤセンサユニット3から送信されたデータ信号であるのか、右側のタイヤセンサユニット3から送信されたデータ信号であるのかを判定する。本実施形態では、正のひずみデータを送信したタイヤセンサユニット3が左側に位置し、負のひずみデータを送信したタイヤセンサユニット3が右側に位置している。そして、前側左側(FL)の車輪2と、前側右側(FR)の車輪2の位置が特定されると、受信機ユニットコントローラ33は、各タイヤセンサユニット3からのデータ信号に基づいて、送信元のタイヤセンサユニット3に対応するタイヤ6のタイヤ内圧力及びタイヤ内温度を把握する。
【0032】
同様に、後側左側(RL)の車輪2、及び後側右側(RR)の車輪2についても同様に左右位置の判定が行われる。
上記実施形態によれば、以下のような効果を得ることができる。
【0033】
(1)タイヤセンサユニット3の基板21にひずみセンサ20を設けた。車両1の発進時に加速するときは、その加速に伴いタイヤセンサユニット3の基板21にひずみが発生する。このひずみは、車輪2の左側と右側とで回転方向が逆であることから、ひずみセンサ20から発生するひずみを反映したデータ信号が逆になり、データ信号が送信されたタイヤセンサユニット3が左側の車輪2に設けられたものか、右側の車輪2に設けられたものかを判定することができる。そして、車輪2の左右位置を判定することができれば、受信機ユニットコントローラ33は各タイヤセンサユニット3からのデータ信号に基づき各タイヤ6の状態を把握することができる。したがって、受信機ユニット4に、各タイヤセンサユニット3それぞれに対応して発信機を必要としなくても、タイヤ6の状態を検出・把握することができ、発信機を必要とする場合と比較してタイヤ状態監視装置を安価にすることができる。
【0034】
(2)車両1の定速走行時は、左右のひずみセンサ20が検出するひずみは、右側の車輪2と左側の車輪2とでほぼ同じとなり、受信機ユニットコントローラ33による車輪2の左右位置の判定がしづらくなる。ここで、加速度センサ13で検出される値がゼロから変化しつつあるときの車両の状態は、定速走行状態ではなく発進状態である。このため、加速度センサ13を用いることで、車両1が発進時の加速中にあることを判定することができ、左側の車輪2と右側の車輪2とでひずみの値が異なるときに、車輪2の左右位置を判定することができる。その結果として、定速走行中に、受信機ユニットコントローラ33が車輪2の左右位置を判定しようとして判定不能になるといった、無駄な判定処理を行ってしまうことを無くすことができる。
【0035】
(3)タイヤセンサユニット3の基板21にひずみセンサ20を追加し、このひずみセンサ20からのデータ信号に基づいて車輪2の左右位置の判定を行うようにした。ひずみセンサ20は安価であるため、車輪2の左右位置の判定のために追加する部品を安価にしてタイヤセンサユニット3の製造コストを抑えることができる。
【0036】
(4)ひずみセンサ20として素子が1つの単軸型のものを採用したため、車輪2の左右位置の判定ために追加する部品をより安価にしてタイヤセンサユニット3の製造コストを抑えることができる。
【0037】
(5)例えば、ひずみセンサ20を車輪2のホイール部5に設けると、ひずみセンサ20とタイヤセンサユニット3とをリード線等で接続する必要が生じ、タイヤセンサユニット3が大型化してしまう。しかし、ひずみセンサ20は、タイヤセンサユニット3の基板21に貼着され、タイヤセンサユニット3のケース3a内に収納されているため、タイヤセンサユニット3の体格を大型化することなく車輪2の左右位置を判定することができる。
【0038】
なお、上記実施形態は以下のように変更してもよい。
○ 実施形態では、加速度センサ13で検出される加速度データがゼロから変化しつつあるときに車両1の発進時と判定して、車輪2の左右位置を判定するものであったが、これに限らない。例えば、受信機ユニットコントローラ33は、遠心加速度がゼロに変化しつつあることを契機に車両1が停止中状態にあるか否かを判定し、車両1が停止中状態にあると判定した場合に、ひずみセンサ20のデータ信号に基づき車輪2の左右位置を判定してもよい。又は、受信機ユニットコントローラ33は、車両1の走行中の加速時や減速時に車輪2の左右位置を判定してもよい。
【0039】
○ 実施形態では、ひずみセンサ20は、素子が1つの単軸型のものを採用したが、2つの素子が直交したり、交差して配置された2軸型のものや3軸型のものを採用してもよい。
【0040】
○ 実施形態では、タイヤセンサユニット3の基板21にひずみセンサ20を貼着したが、タイヤセンサユニット3のケース3a(被測定物)にひずみセンサ20を貼着してもよい。
【0041】
○ 実施形態では、ひずみセンサ20を用いて車輪2の左右位置を判定したが、ひずみセンサ20の検出データを用いて、車輪2におけるホイール部5へのタイヤ6の装着に伴うタイヤセンサユニット3の基板21の損傷の有無を検出するようにしてもよい。
【0042】
○ 本発明は、タイヤ状態監視装置への適用に限定されるものではなく、車輪2の位置判定を行う各種の装置に適用することができる。
次に、上記実施形態及び別例から把握できる技術的思想について以下に追記する。
【0043】
(イ)前記ひずみセンサは、素子が1つの単軸型である請求項1〜請求項3のうちいずれか一項に記載の車輪位置判定装置。
(ロ)前記各車輪側ユニットは、前記車輪におけるタイヤの状態を検出するとともに検出したタイヤの状態を示すデータを含むデータ信号を無線送信するタイヤセンサユニットである請求項1〜請求項3、及び技術的思想(イ)のうちいずれか一項に記載の車輪位置判定装置。
【符号の説明】
【0044】
1…車両、2…車輪、3…タイヤセンサユニット(車輪側ユニット)、4…受信機ユニット、13…加速度センサ、16…RF送信回路(送信部)、20…ひずみセンサ、21…基板(被測定物)、32…受信アンテナ、33…受信機ユニットコントローラ(車輪位置判定部)、35…RF受信回路(受信部)。
【技術分野】
【0001】
本発明は、車両に設けられた複数の車輪の左右位置を判定するための車輪位置判定装置に関し、特にタイヤ状態監視装置に用いるのに好適な車輪位置判定装置に関する。
【背景技術】
【0002】
例えば、特許文献1には、車両に設けられた複数のタイヤの状態を運転者が車室内で確認できるようにするための装置として、無線方式のタイヤ状態監視装置が提案されている。特許文献1に記載されたタイヤ状態監視装置は、車両の車輪にそれぞれ装着される複数の送信機と、車両の車体に搭載される受信機とを備えている。各送信機は、対応するタイヤの状態、即ちタイヤ内の圧力や温度を検出し、検出されたタイヤの状態を示すデータを含むデータ信号を無線送信する。一方、受信機は、各送信機からのデータ信号を受信アンテナを通じて受信して、タイヤ状態に関する情報を、車室内に設けられた表示器に必要に応じて表示させる。また、受信機は、4つの送信機それぞれに対応するように4つの発信機を備えている。そして、各発信機からトリガ信号が無線送信され、送信機が対応する発信機からのトリガ信号を検出するとタイヤ状態を検出する。
【0003】
上記のようなタイヤ状態監視装置では、受信されたデータ信号が複数のタイヤのうちのどのタイヤに設けられた送信機から発信されたものであるのかを、言い換えれば、受信されたデータ信号に関連するタイヤ(車輪)の位置を、受信機において判定できるようにするのが望ましい。そこで、上記特許文献1では、各送信機はそれぞれ角加速度センサを備える。そして、車両の加速時、送信機における角加速度センサの出力する角加速度値は、左側のタイヤと右側のタイヤとで極性が異なることから、各送信機のコントローラは、角加速度センサからの角加速度データに基づいて、自身が左側か右側のタイヤに設けられたかを判定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−262324号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1においては、タイヤ状態を検出するために、各送信機それぞれに対応して4つの発信機を必要とし、タイヤ状態監視装置のコストが嵩んでしまう。
本発明の目的は、安価な構成で車輪の左右位置を判定することができる車輪位置判定装置を提供することにある。
【課題を解決するための手段】
【0006】
上記問題点を解決するために、請求項1に記載の発明は、車両に設けられた複数の車輪の位置を判定するための車輪位置判定装置であって、前記車輪それぞれに設けられる車輪側ユニット、及び前記車両の車体に設置される受信機ユニットを備え、前記各車輪側ユニットは、前記車両の加速又は減速に伴う被測定物のひずみを検出し、該ひずみに応じたデータ信号を発生するひずみセンサと、前記データ信号を無線送信する送信部とを有し、前記受信機ユニットは、前記各車輪側ユニットから送信されるデータ信号を受信アンテナを通じて受信する受信部と、受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が前記車両の左側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのか、右側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのかを判定する車輪位置判定部と、を有する。
【0007】
これによれば、車両の加速時又は減速時には、車輪の周方向への加速又は減速によって被測定物には、加速又は減速によるひずみが発生する。左側の車輪と右側の車輪とでは、回転方向が逆となることから、ひずみの値も左側の車輪と右側の車輪とで値が逆となり、ひずみセンサから発生するデータ信号に違いが生じる。そして、このひずみの値の違いに基づいて車輪位置判定部は、データ信号が送信された車輪側ユニットが、左側の車輪に設けられたものか、右側の車輪に設けられたものかを判定することができる。車輪位置判定部により、車輪の左右位置を判定することができれば、受信機ユニットにより各位置の車輪の状態を把握することができる。したがって、本発明によれば、背景技術のように、受信機ユニットに、各車輪側ユニットそれぞれに対応して発信機を必要としなくても、車輪の状態を検出・把握することができ、各車輪それぞれに対応して発信機を必要とする場合と比較して車輪位置判定装置を安価にすることができる。
【0008】
また、前記各車輪側ユニットは、前記車輪と共に回転して遠心加速度を反映したデータ信号を発生する加速度センサを備え、前記車輪位置判定部は、前記遠心加速度がゼロから変化しつつあることを契機に前記車両が発進状態にあるか否か、又は前記遠心加速度がゼロに変化しつつあることを契機に前記車両が停止中状態にあるか否かを判定し、前記車両が前記発進状態又は前記停止中状態にあると判定した場合に、前記ひずみセンサの前記データ信号に基づき前記車輪の左右位置を判定してもよい。
【0009】
これによれば、車両が定速走行状態にあるときは、ひずみセンサによって検出されるひずみの値は、左側の車輪と右側の車輪とでほぼ同じになり、車輪位置判定部では、ひずみの違いに基づいて車輪の左右位置が判定しにくくなる。加速度センサで遠心加速度がゼロから変化するとき、又は遠心加速度がゼロに変化するときの車両の状態は、定速走行状態ではなく発進状態又は停止中状態である。このため、加速度センサを用いることで、車両が発進状態又は停止中状態にあることを判定することができ、左側の車輪と右側の車輪とでひずみの値が異なる発進状態又は停止中状態にあるときに、車輪の左右位置を判定することができる。その結果として、定速走行中に、車輪位置判定部が車輪の左右位置を判定しようとして判定不能になるといった、無駄な判定処理を行ってしまうことを無くすことができる。
【0010】
前記被測定物は、前記車輪側ユニットの基板であってもよい。
これによれば、ひずみセンサは、車輪側ユニット内に収納されているため、車輪側ユニットの体格を大型化することなく車輪の左右位置を判定することができる。
【発明の効果】
【0011】
本発明によれば、安価な構成で車輪の左右位置を判定することができる。
【図面の簡単な説明】
【0012】
【図1】実施形態のタイヤ状態監視装置が搭載された車両を示す概略構成図。
【図2】図1のタイヤセンサユニットの回路構成を示すブロック図。
【図3】タイヤセンサユニットの配置を示すため車輪を部分破断して示す図。
【発明を実施するための形態】
【0013】
以下に、本発明の車輪位置判定装置をタイヤ状態監視装置に具体化した一実施形態について、図1〜図3を参照して説明する。
図1に示すように、タイヤ状態監視装置は、車両1の4つの車輪2にそれぞれ取り付けられる4つのタイヤセンサユニット3と、車両1の車体に設置される受信機ユニット4とを備えている。各車輪2は、ホイール部5と、このホイール部5に装着されるタイヤ6とを含む。なお以後、適宜に、前側左側の車輪2を符号FLで示し、前側右側の車輪2を符号FRで示し、後側左側の車輪2を符号RLで示し、後側右側の車輪2を符号RRで示す。
【0014】
車輪側ユニットとしての各タイヤセンサユニット3は、タイヤ6の内部空間に配置されるように、そのタイヤ6が装着されたホイール部5に対して取り付けられている。各タイヤセンサユニット3は、対応するタイヤ6の状態(タイヤ内圧力、タイヤ内温度)を検出して、検出されたタイヤ状態を示すデータを含む信号、即ちタイヤ状態データ信号(以下、データ信号と称する)を無線送信する。
【0015】
図3に示すように、各タイヤセンサユニット3において、そのケース3a内には基板21が収納されるとともに、図2に示すように、基板21には、圧力センサ11、温度センサ12、加速度センサ13、ひずみセンサ20、センサユニットコントローラ14、及び、送信部としてのRF送信回路16が設けられている。圧力センサ11、温度センサ12、加速度センサ13、ひずみセンサ20、センサユニットコントローラ14、及びRF送信回路16は、タイヤセンサユニット3に内蔵された電池22から供給される電力によって駆動される。
【0016】
圧力センサ11は、対応するタイヤ6内の圧力(内部空気圧)を検出して、その検出によって得られたタイヤ内圧力データをセンサユニットコントローラ14に出力する。温度センサ12は、対応するタイヤ6内の温度(内部空気温度)を検出して、その検出によって得られたタイヤ内温度データをセンサユニットコントローラ14に出力する。
【0017】
加速度センサ13は、例えば、ピエゾ抵抗型や静電容量型の加速度センサとして周知のものであり、本実施形態では、加速度センサ13として1軸の加速度センサ、すなわち一つの検出軸に沿った方向の加速度成分を検出可能な加速度センサが用いられる。図3に示すように、加速度センサ13は、加速度の検出方向(すなわち、検出軸)10が車輪2の径方向と一致するように、基板21に配置される。
【0018】
そして、加速度センサ13は、対応する車輪2の加速度を検出して、その検出によって得られたタイヤ加速度データをセンサユニットコントローラ14に出力する。例えば、車輪2は、車両1の発進時や加速時には、値が増加する加速度データを、車両1の停止時や減速時には、値が減少する加速度データを、それぞれセンサユニットコントローラ14に出力する。
【0019】
図2に示すように、センサユニットコントローラ14は、CPU及び記憶部14a(RAMやROM等)を含むマイクロコンピュータ等よりなり、記憶部14aには各タイヤセンサユニット3に固有の識別情報であるIDコードが登録されている。このIDコードは、各タイヤセンサユニット3を受信機ユニット4において識別するために使用される情報であり、センサユニットコントローラ14からの送信信号に含められる。センサユニットコントローラ14は、タイヤ内圧力データ、タイヤ内温度データ、タイヤ加速度データ、及びIDコードを含むデータを、RF送信回路16に出力する。RF送信回路16は、センサユニットコントローラ14からのデータを変調して変調信号を生成し、変調信号を送信アンテナ19から無線送信する。
【0020】
各タイヤセンサユニット3は、例えば、タイヤ状態の計測動作を第1の所定時間間隔(例えば、1〜15秒間隔)で定期的に行う一方、データ信号の送信動作を、第1の所定時間間隔よりも長い第2の所定時間間隔(例えば、1分間隔)で定期的に行う。なお、加速度センサ13の加速度データがある閾値を越えたときは、第2の所定時間間隔より短い間隔で送信動作を行ってもよい。すなわち、車両1の走行状態と停止状態で、それぞれ第2の所定時間間隔を変えて送信動作を行ってもよい。但し、計測されたタイヤ状態が異常を示す場合(例えば、タイヤ内圧力の異常低下、タイヤ内圧力の急変、タイヤ内温度の急変等)、タイヤセンサユニット3は定期的な送信動作とは関係無く、直ちに送信動作を行う。
【0021】
図1に示すように、受信機ユニット4は、車体の所定箇所に設置され、例えば車両1のバッテリ(図示せず)からの電力によって動作する。受信機ユニット4は、車体の任意の箇所に配置された受信アンテナ32を備えており、各タイヤセンサユニット3から受信アンテナ32を通じてデータ信号を受信して、その受信した信号を処理する。本実施形態において、受信アンテナ32は、車両1の前後方向において、前側の車輪2と後側の車輪2との間のほぼ中間位置に配置されている。
【0022】
受信機ユニット4は、車輪位置判定部としての受信機ユニットコントローラ33を備えるとともに、受信部としてのRF受信回路35を備えている。受信機ユニット4の受信機ユニットコントローラ33には、表示器38が有線接続されている。受信機ユニットコントローラ33はCPU及び記憶部(ROMやRAM等)を含むマイクロコンピュータ等よりなり、受信機ユニット4の動作を統括的に制御する。RF受信回路35は、各タイヤセンサユニット3から受信アンテナ32を通じて受信された変調信号を復調して、受信機ユニットコントローラ33に送る。受信機ユニットコントローラ33は、RF受信回路35からのデータ信号に基づき、送信元のタイヤセンサユニット3に対応するタイヤ6の内部空気圧及び内部温度を把握する。
【0023】
さらには、受信機ユニットコントローラ33は、RF受信回路35からのデータ信号に基づき、送信元のタイヤセンサユニット3が、車両1の左側の車輪2(FL,RL)に設けられたものであるのか、右側の車輪2(FR,RR)に設けられたものであるかを判定する。
【0024】
受信機ユニットコントローラ33は、内部空気圧及び内部温度に関する情報等を表示器38に表示させる。表示器38は、車室内等、車両1の搭乗者の視認範囲に配置され、受信機ユニットコントローラ33により表示器38にはタイヤ内圧力やタイヤ内温度の異常が表示(報知)される。
【0025】
図2及び図3に示すように、タイヤセンサユニット3の基板21に設けられたひずみセンサ20は、例えば、薄い絶縁体上にジグザグ形状にレイアウトされた金属の抵抗体(金属箔)が取り付けられた構造をしたものであり、被測定物、本実施形態では基板21に貼着されて使用される。そして、ひずみセンサ20は、基板21が変形すると、抵抗体が、伸びにより断面積が減るとともに長さが長くなり、その抵抗体の抵抗値が増える(ピエゾ抵抗効果)ことを検出することで、基板21のひずみを検出する。本実施形態では、素子が1つの単軸型のひずみセンサ20が用いられる。
【0026】
ひずみセンサ20は、抵抗値の変化に応じたデータ信号を発生してセンサユニットコントローラ14に出力する。なお、抵抗値の変化は微小であるため、ひずみセンサ20にはブリッジ回路・増幅回路(図示せず)が接続され、これらの回路によってデータ信号として出力される。
【0027】
本実施形態では、ひずみセンサ20はタイヤセンサユニット3の基板21に貼着されて、そのタイヤセンサユニット3がホイール部5に取り付けられることにより車輪2に設けられている。そして、車両1の発進時の加速や停止時や減速の際には、その加減速によって基板21には応力が発生し、ひずみが発生する(変形する)。すると、基板21に貼着されたひずみセンサ20は、基板21のひずみを検出し、データ信号をセンサユニットコントローラ14に出力する。
【0028】
具体的には、例えば前側左側(FL)の車輪2に設けられたひずみセンサ20は、車両1の加速時には車輪2の接線加速方向と逆方向に正のひずみデータを、車両1の減速時には加速時と逆に負のひずみデータを、それぞれセンサユニットコントローラ14に出力する。一方、前側右側(FR)の車輪2は、前側左側(FL)の車輪2とは、逆方向に回転する。このため、前側右側(FR)の車輪2に設けられたひずみセンサ20は、車両1の加速時には、前側左側(FL)の車輪2と逆に負のひずみデータを、車両1の減速時には、前側左側(FL)の車輪2と逆に正のひずみデータを、それぞれセンサユニットコントローラ14に出力する。なお、後側左側(RL)の車輪2、及び後側右側(RR)の車輪2についても同様である。
【0029】
次に、タイヤ状態監視装置の作用について説明する。
車両1の発進時、車輪2が回転し始めると、前側左側(FL)及び前側右側(FR)の車輪2に設けられたタイヤセンサユニット3がそれぞれ回転し、それまでゼロであった遠心加速度が各加速度センサ13によって検出される。そして、各加速度センサ13は、遠心加速度を検出するとともに、その検出によって得られたタイヤ加速度データを反映したデータ信号をセンサユニットコントローラ14に出力する。
【0030】
また、前側左側(FL)の車輪2に設けられたタイヤセンサユニット3が回転し、基板21に応力が発生すると、左側のひずみセンサ20は正のひずみデータを検出し、センサユニットコントローラ14に出力する。一方、前側右側(FR)の車輪2に設けられたタイヤセンサユニット3が回転し、基板21に応力が発生すると、右側のひずみセンサ20は負のひずみデータを検出し、センサユニットコントローラ14に出力する。センサユニットコントローラ14は、タイヤ加速度データ、及びひずみデータを含むデータ信号をRF受信回路35に送信する。
【0031】
RF受信回路35は、各タイヤセンサユニット3から受信アンテナ32を通じて受信された変調信号を復調して、受信機ユニットコントローラ33に送る。そして、受信機ユニットコントローラ33は、タイヤ加速度データに基づき、遠心加速度がゼロから変化しつつあることから車両1が発進時であると判定する。さらに、受信機ユニットコントローラ33は、ひずみデータの極性の違い(正か負)に基づいて、それらデータ信号が左側のタイヤセンサユニット3から送信されたデータ信号であるのか、右側のタイヤセンサユニット3から送信されたデータ信号であるのかを判定する。本実施形態では、正のひずみデータを送信したタイヤセンサユニット3が左側に位置し、負のひずみデータを送信したタイヤセンサユニット3が右側に位置している。そして、前側左側(FL)の車輪2と、前側右側(FR)の車輪2の位置が特定されると、受信機ユニットコントローラ33は、各タイヤセンサユニット3からのデータ信号に基づいて、送信元のタイヤセンサユニット3に対応するタイヤ6のタイヤ内圧力及びタイヤ内温度を把握する。
【0032】
同様に、後側左側(RL)の車輪2、及び後側右側(RR)の車輪2についても同様に左右位置の判定が行われる。
上記実施形態によれば、以下のような効果を得ることができる。
【0033】
(1)タイヤセンサユニット3の基板21にひずみセンサ20を設けた。車両1の発進時に加速するときは、その加速に伴いタイヤセンサユニット3の基板21にひずみが発生する。このひずみは、車輪2の左側と右側とで回転方向が逆であることから、ひずみセンサ20から発生するひずみを反映したデータ信号が逆になり、データ信号が送信されたタイヤセンサユニット3が左側の車輪2に設けられたものか、右側の車輪2に設けられたものかを判定することができる。そして、車輪2の左右位置を判定することができれば、受信機ユニットコントローラ33は各タイヤセンサユニット3からのデータ信号に基づき各タイヤ6の状態を把握することができる。したがって、受信機ユニット4に、各タイヤセンサユニット3それぞれに対応して発信機を必要としなくても、タイヤ6の状態を検出・把握することができ、発信機を必要とする場合と比較してタイヤ状態監視装置を安価にすることができる。
【0034】
(2)車両1の定速走行時は、左右のひずみセンサ20が検出するひずみは、右側の車輪2と左側の車輪2とでほぼ同じとなり、受信機ユニットコントローラ33による車輪2の左右位置の判定がしづらくなる。ここで、加速度センサ13で検出される値がゼロから変化しつつあるときの車両の状態は、定速走行状態ではなく発進状態である。このため、加速度センサ13を用いることで、車両1が発進時の加速中にあることを判定することができ、左側の車輪2と右側の車輪2とでひずみの値が異なるときに、車輪2の左右位置を判定することができる。その結果として、定速走行中に、受信機ユニットコントローラ33が車輪2の左右位置を判定しようとして判定不能になるといった、無駄な判定処理を行ってしまうことを無くすことができる。
【0035】
(3)タイヤセンサユニット3の基板21にひずみセンサ20を追加し、このひずみセンサ20からのデータ信号に基づいて車輪2の左右位置の判定を行うようにした。ひずみセンサ20は安価であるため、車輪2の左右位置の判定のために追加する部品を安価にしてタイヤセンサユニット3の製造コストを抑えることができる。
【0036】
(4)ひずみセンサ20として素子が1つの単軸型のものを採用したため、車輪2の左右位置の判定ために追加する部品をより安価にしてタイヤセンサユニット3の製造コストを抑えることができる。
【0037】
(5)例えば、ひずみセンサ20を車輪2のホイール部5に設けると、ひずみセンサ20とタイヤセンサユニット3とをリード線等で接続する必要が生じ、タイヤセンサユニット3が大型化してしまう。しかし、ひずみセンサ20は、タイヤセンサユニット3の基板21に貼着され、タイヤセンサユニット3のケース3a内に収納されているため、タイヤセンサユニット3の体格を大型化することなく車輪2の左右位置を判定することができる。
【0038】
なお、上記実施形態は以下のように変更してもよい。
○ 実施形態では、加速度センサ13で検出される加速度データがゼロから変化しつつあるときに車両1の発進時と判定して、車輪2の左右位置を判定するものであったが、これに限らない。例えば、受信機ユニットコントローラ33は、遠心加速度がゼロに変化しつつあることを契機に車両1が停止中状態にあるか否かを判定し、車両1が停止中状態にあると判定した場合に、ひずみセンサ20のデータ信号に基づき車輪2の左右位置を判定してもよい。又は、受信機ユニットコントローラ33は、車両1の走行中の加速時や減速時に車輪2の左右位置を判定してもよい。
【0039】
○ 実施形態では、ひずみセンサ20は、素子が1つの単軸型のものを採用したが、2つの素子が直交したり、交差して配置された2軸型のものや3軸型のものを採用してもよい。
【0040】
○ 実施形態では、タイヤセンサユニット3の基板21にひずみセンサ20を貼着したが、タイヤセンサユニット3のケース3a(被測定物)にひずみセンサ20を貼着してもよい。
【0041】
○ 実施形態では、ひずみセンサ20を用いて車輪2の左右位置を判定したが、ひずみセンサ20の検出データを用いて、車輪2におけるホイール部5へのタイヤ6の装着に伴うタイヤセンサユニット3の基板21の損傷の有無を検出するようにしてもよい。
【0042】
○ 本発明は、タイヤ状態監視装置への適用に限定されるものではなく、車輪2の位置判定を行う各種の装置に適用することができる。
次に、上記実施形態及び別例から把握できる技術的思想について以下に追記する。
【0043】
(イ)前記ひずみセンサは、素子が1つの単軸型である請求項1〜請求項3のうちいずれか一項に記載の車輪位置判定装置。
(ロ)前記各車輪側ユニットは、前記車輪におけるタイヤの状態を検出するとともに検出したタイヤの状態を示すデータを含むデータ信号を無線送信するタイヤセンサユニットである請求項1〜請求項3、及び技術的思想(イ)のうちいずれか一項に記載の車輪位置判定装置。
【符号の説明】
【0044】
1…車両、2…車輪、3…タイヤセンサユニット(車輪側ユニット)、4…受信機ユニット、13…加速度センサ、16…RF送信回路(送信部)、20…ひずみセンサ、21…基板(被測定物)、32…受信アンテナ、33…受信機ユニットコントローラ(車輪位置判定部)、35…RF受信回路(受信部)。
【特許請求の範囲】
【請求項1】
車両に設けられた複数の車輪の位置を判定するための車輪位置判定装置であって、
前記車輪それぞれに設けられる車輪側ユニット、及び前記車両の車体に設置される受信機ユニットを備え、
前記各車輪側ユニットは、前記車両の加速又は減速に伴う被測定物のひずみを検出し、該ひずみに応じたデータ信号を発生するひずみセンサと、
前記データ信号を無線送信する送信部とを有し、
前記受信機ユニットは、前記各車輪側ユニットから送信されるデータ信号を受信アンテナを通じて受信する受信部と、
受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が前記車両の左側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのか、右側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのかを判定する車輪位置判定部と、を有することを特徴とする車輪位置判定装置。
【請求項2】
前記各車輪側ユニットは、前記車輪と共に回転して遠心加速度を反映したデータ信号を発生する加速度センサを備え、前記車輪位置判定部は、前記遠心加速度がゼロから変化しつつあることを契機に前記車両が発進状態にあるか否か、又は前記遠心加速度がゼロに変化しつつあることを契機に前記車両が停止中状態にあるか否かを判定し、前記車両が前記発進状態又は前記停止中状態にあると判定した場合に、前記ひずみセンサの前記データ信号に基づき前記車輪の左右位置を判定する請求項1に記載の車輪位置判定装置。
【請求項3】
前記被測定物は、前記車輪側ユニットの基板である請求項1又は請求項2に記載の車輪位置判定装置。
【請求項1】
車両に設けられた複数の車輪の位置を判定するための車輪位置判定装置であって、
前記車輪それぞれに設けられる車輪側ユニット、及び前記車両の車体に設置される受信機ユニットを備え、
前記各車輪側ユニットは、前記車両の加速又は減速に伴う被測定物のひずみを検出し、該ひずみに応じたデータ信号を発生するひずみセンサと、
前記データ信号を無線送信する送信部とを有し、
前記受信機ユニットは、前記各車輪側ユニットから送信されるデータ信号を受信アンテナを通じて受信する受信部と、
受信されたデータ信号に含まれるひずみに関する情報に基づき該データ信号が前記車両の左側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのか、右側の車輪に設けられた前記車輪側ユニットから送信されたデータ信号であるのかを判定する車輪位置判定部と、を有することを特徴とする車輪位置判定装置。
【請求項2】
前記各車輪側ユニットは、前記車輪と共に回転して遠心加速度を反映したデータ信号を発生する加速度センサを備え、前記車輪位置判定部は、前記遠心加速度がゼロから変化しつつあることを契機に前記車両が発進状態にあるか否か、又は前記遠心加速度がゼロに変化しつつあることを契機に前記車両が停止中状態にあるか否かを判定し、前記車両が前記発進状態又は前記停止中状態にあると判定した場合に、前記ひずみセンサの前記データ信号に基づき前記車輪の左右位置を判定する請求項1に記載の車輪位置判定装置。
【請求項3】
前記被測定物は、前記車輪側ユニットの基板である請求項1又は請求項2に記載の車輪位置判定装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−67244(P2013−67244A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−206270(P2011−206270)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000204033)太平洋工業株式会社 (143)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000204033)太平洋工業株式会社 (143)
[ Back to top ]