
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の車速を一定の速度に維持する車速制御システムに関する。
【背景技術】
【0002】
自車両の車速を自動制御することで、ドライバによるアクセル操作の手間を省くオートクルーズが知られている。このオートクルーズでは、ドライバにより設定された目標速度を維持するという方法や、特許文献1に記載されているように、自車両の前方を走行する先行車両との間の車間距離を維持するように車速を自動調整するといった方法により、車速の自動制御が行われる。特許文献1には、自車両の左右或いは後方を走行する他の車両との間の車間距離に基づき先行車両と自車両との間の車間距離を設定し、該車間距離を維持するよう自車両の車速を自動調整することが記載されている。こうすることで、先行車両との間に周辺状況に応じた適切な車間距離を取ることができ、ドライバの運転疲労を低減することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−189055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このように、従来のオートクルーズでは、ドライバからの指示や自車両周辺を走行する車両に応じて車速が設定されていたが、自車両の燃料の残量や自車両周辺の気象状況等を考慮して車速が設定されることは無かった。このため、燃料の残量が残り少なくなった場合や、気象状況が悪化した場合等には、運転に支障をきたすおそれがあった。
【0005】
本願発明は上記課題に鑑みてなされたものであり、オートクルーズによる運転をより円滑に行うことが可能となる車速制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題に鑑みてなされた請求項1に記載の発明は、自車両が目標速度を維持して走行する一定速走行を行うため、車速が目標速度となるように当該自車両を駆動する駆動装置を自動制御する車速制御システムに関するものであり、外部からの指示に応じて目標速度を設定する設定手段と、一定速走行を行う自車両の走行状態を検知する検知手段と、検知手段により検知された走行状態に応じた自車両の推奨速度を提示する提示手段と、を備えることを特徴とする。
【0007】
こうすることにより、ドライバに対し、現在の走行状態に応じた適切な車速を把握させ、一定速走行(目標速度を維持した状態で自車両を走行させる方法でのオートクルーズ)における目標速度として設定させることが可能となる。このため、一定速走行の際に適切な車速を維持して自車両を走行させることが可能となり、一定速走行による運転をより円滑に行うことができる。
【0008】
具体的には、車速制御システムは、自車両に蓄えられた駆動装置のエネルギーの残量を、走行状態として検知し、エネルギーの残量が低下した場合に、エネルギーを効率良く消費することができる車速である低燃費速度を、推奨速度として提示しても良い(請求項2)。
【0009】
こうすることにより、エネルギーの残量が低下した際に、ドライバに低燃費速度を把握させ、低燃費速度を目標速度として設定させることができる。このため、一定速走行による運転中にエネルギーが切れ、自車両が立ち往生してしまうといった事態の発生を防ぐことができる。
【0010】
さらに、請求項3に記載されているように、車速制御システムは、地図データに基づき自車両の目的地までの走行経路を特定する走行経路特定手段と、走行経路に基づき、検知手段により検知されたエネルギーの残量で、現在の目標速度での一定速走行により目的地まで到達できるかどうかを判定する到達可否判定手段と、を備え、提示手段は、到達可否判定手段により目的地まで到達できないと判定される程度にエネルギーの残量が低下した場合に、低燃費速度を推奨速度として提示しても良い。
【0011】
こうすることにより、一定速走行による運転中にエネルギーが切れ、目的地に到達できなくなってしまうといった事態の発生を防ぐことができる。
なお、目的地とは、ドライバにより設定されたものであっても良く(請求項4)、こうすることで、一定速走行によりドライバの行きたい場所まで確実に移動することが可能となる。
【0012】
また、目的地とは、ガソリンスタンド等といった駆動装置のエネルギーを供給することができる場所であっても良く(請求項5)、こうすることで、一定速走行によりガソリンスタンド等まで確実に移動し、自車両にエネルギーを補給することが可能となる。
【0013】
また、エネルギーの残量が少なくなってきた場合には、目的地までの移動に要するエネルギーをなるべく抑えることが望ましい。
そこで、請求項6に記載の車速制御システムは、地図データに基づき、目的地までの走行によるエネルギーの消費を最も抑えることができる経路であるエコルートを特定するエコルート特定手段をさらに備え、提示手段は、エコルートをさらに提示する。
【0014】
こうすることにより、低燃費速度での一定速走行によりエコルートに沿った運転を行うことが可能となり、目的地までの移動に要するエネルギーを抑えることが可能となる。このため、エネルギーの残量が少ない場合に、より確実に一定速走行により目的地に到達することができる。
【0015】
また、エコルートを低燃費速度で走行しても設定した目的地やガソリンスタンド等まで走行できない程度に、エネルギーの残量が低下してしまう場合もある。
そこで、請求項7に記載の車速制御システムは、エコルートに基づき、検知手段により検知されたエネルギーの残量で、低燃費速度での一定速走行により目的地まで到達できるかどうかを判定するエコルート判定手段と、エコルート判定手段により目的地に到達できないと判定された場合に、警告を行う警告手段とを備える。
【0016】
こうすることにより、ドライバに対し、エネルギーが尽きる前に、エネルギー不足により設定した目的地やガソリンスタンド等への到達が不可能となったことを知らせることができ、ドライバは、早期に目的地等に到達できないことに対しての対策を講じることができる。
【0017】
また、低燃費速度を推奨速度として提示すると、ドライバは、現在のエネルギーの残量で、低燃費速度での一定速走行により設定した目的地やガソリンスタンド等まで到達可能であると認識しまうおそれがある。
【0018】
そこで、請求項8に記載の車速制御システムは、提示手段は、到達可否判定手段により目的地まで到達できないと判定される程度にエネルギーの残量が低下し、尚且つ、エコルート判定手段により目的地に到達できると判定された場合に、低燃費速度を推奨速度として提示する。
【0019】
こうすることにより、エネルギーが不足して目的地等への到達が不可能となった場合(すなわち、低燃費速度での一定速走行によりエコルートを走行しても目的地等に到達できない場合)には、低燃費速度の提示を行わなくすることができる。このため、エネルギー不足により目的地等への到達が不可能となった場合に、ドライバに対し、目標速度を低燃費速度に設定してエコルートに沿って走行すれば目的地等に到達できる、という誤解を与えてしまうことを防ぐことができる。
【0020】
また、請求項9に記載されているように、目標速度での一定速走行により走行した場合のエネルギーの減少度合いと、低燃費速度での一定速走行により走行した場合のエネルギーの減少度合いとを算出する減少度合い算出手段をさらに備え、提示手段は、減少度合い算出手段により算出された、目標速度での一定速走行と、低燃費速度での一定速走行とについてのエネルギーの減少度合いをさらに提示しても良い。
【0021】
こうすることにより、ドライバは、推奨速度(低燃費速度)での一定速走行により、自車両の走行距離がどの程度伸びるかを容易に把握することができ、低燃費速度を目標速度として設定することをより強く促すことができる。
【0022】
また、気象状況が悪化した場合等や、舗装されていない道路の走行を開始した場合等のように、自車両周辺の環境が悪化した場合には、現状の目標速度での一定速走行による運転が困難となってしまう場合がある。
【0023】
そこで、請求項10〜12に記載の車速制御システムは、自車両周辺における気象状況や、自車両が走行している道路の路面の状態や、自車両周辺の視界を、走行状態として検知する。
【0024】
こうすることにより、ドライバに対し、自車両周辺の環境に応じた推奨速度を提示し、該推奨速度を目標速度として設定させることができる。このため、自車両周辺の環境が悪化した場合であっても、一定速走行による運転を円滑に行うことができる。
【図面の簡単な説明】
【0025】
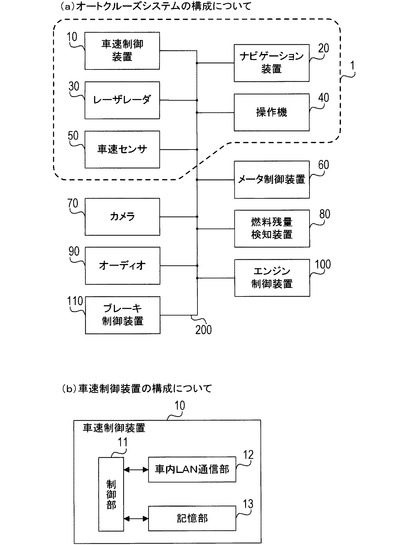
【図1】オートクルーズシステムの構成や、車速制御装置の構成を示すブロック図である。
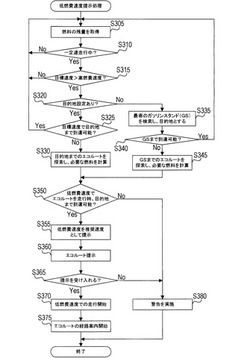
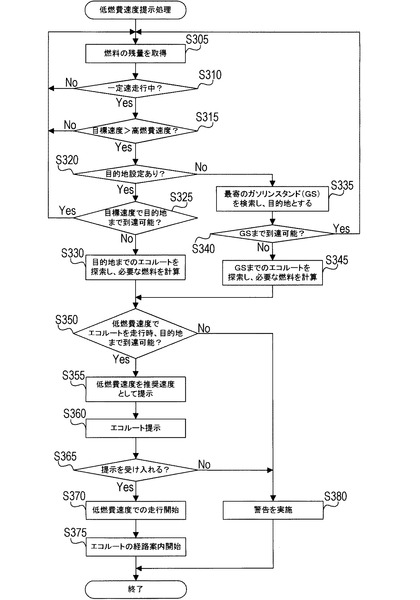
【図2】低燃費速度提示処理のフローチャートである。
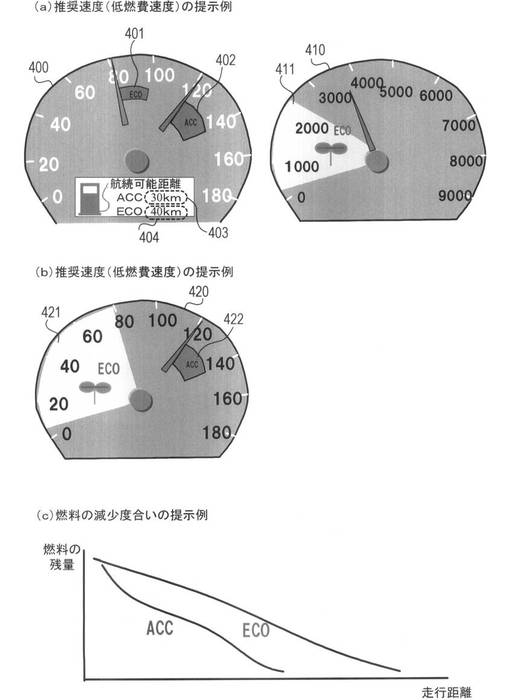
【図3】推奨速度(低燃費速度)や燃料の減少度合いの提示例を示す説明図である。
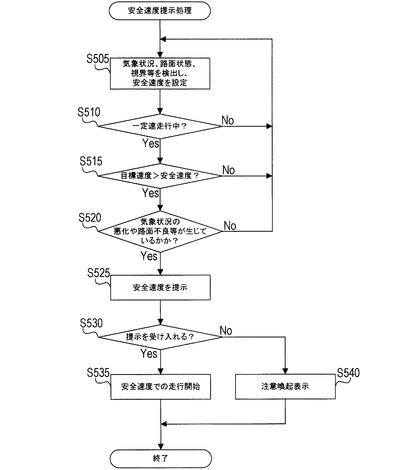
【図4】安全速度提示処理のフローチャートである。
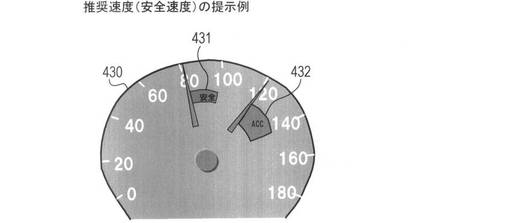
【図5】推奨速度(安全速度)の提示例を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0027】
[構成の説明]
図1は、ガソリン等を燃料とするエンジンにより駆動される自車両の車速を自動制御する本実施形態のオートクルーズシステム1の構成を示すブロック図である。このオートクルーズシステム1は、自車両前方を走行する先行車両との車間距離を一定に保つように車速を自動調整する方法や、ドライバにより設定された目標速度を維持して自車両を走行させるといった方法により、オートクルーズが行われる。また、このオートクルーズシステム1は、自車両の車速を調整するためにエンジンやブレーキを制御する車速制御装置10と、地図データに基づき目的地までの経路を探索し、経路案内を行うナビゲーション装置20と、先行車両との間の車間距離を計測するレーザレーダ30と、ジョグダイヤルや各種スイッチから構成された操作機40と、自車両の車速を検知する車速センサ50等から構成されており、これらの装置は、車内LAN200を介して互いに接続されている。
【0028】
なお、車内LAN200には、さらに、メータを制御するメータ制御装置60と、自車両周辺を撮影するカメラ70と、自車両の燃料の残量を検知する燃料残量検知装置80と、テレビやラジオ等を備える周知のオーディオ90と、エンジンの作動状態を制御するエンジン制御装置100と、ブレーキの作動状態を制御するブレーキ制御装置110等が接続されている。
【0029】
また、車速制御装置10は、CPU、ROM、RAM、I/O及びこれらを接続するバスライン等からなる周知のマイクロコンピュータを中心に構成され、ROMに記憶されたプログラムに従い当該車速制御装置10を統括制御する制御部11と、車内LAN200を介して他の装置と通信を行う車内LAN通信部12と、フラッシュメモリ等といった記憶保持動作が不要なデバイスから構成され、各種情報を記憶することができる記憶部13等から構成されている。
【0030】
[動作の説明]
次に、ドライバにより設定された目標速度を維持した状態で自車両を走行させる方法でのオートクルーズ(一定速走行)を行う際のオートクルーズシステム1の動作について説明する。
【0031】
一定速走行の際には、車速制御装置10の制御部11は、操作機40を介して受け付けた操作に応じて目標速度を設定する。そして、車内LAN200を介して、車速センサ50から自車両の車速を受信すると共に、エンジン制御装置100やブレーキ制御装置110等に各種コマンドを送信し、自車両が目標速度を維持して走行するよう、エンジンの回転数やブレーキの作動状態や変速比等を制御する。
【0032】
また、これに加えて、自車両の燃料の残量や自車両周辺の天候等といった走行状態に基づき、現状の目標速度により一定速走行を行った場合に走行に支障をきたすかどうかを判定し、支障をきたすと判定した場合には、推奨速度を提示して目標速度を推奨速度に設定するように促す。以下では、自車両の走行状態に応じた推奨速度を提示する処理について説明する。
【0033】
(1)低燃費速度提示処理について
まず、自車両の燃料の残量に応じて一定速走行における推奨速度を提示する低燃費速度提示処理について、図2のフローチャートを用いて説明する。本処理は、自車両の運転開始時に起動される処理である。
【0034】
S305では、オートクルーズシステム1の車速制御装置10の制御部11は、車内LAN200を介して、燃料残量検知装置80から自車両の燃料の残量を取得し、S310に処理を移行する。なお、以後、車速制御装置10の制御部11が行う処理を、単に車速制御装置10が行う処理として記載する。
【0035】
S310では、車速制御装置10は、一定速走行中であるか否かを判定し、肯定判定の場合には(S310:Yes)、S315に、否定判定の場合には(S310:No)、S305に処理を移行する。
【0036】
S315では、車速制御装置10は、現在の目標速度が、燃料を効率良く消費できる(換言すれば、燃料の所定分量当りの走行可能距離が長くなる)車速である低燃費速度を上回るかどうかを判定する。なお、低燃費速度とは、燃料の消費効率の良さと、安全且つ円滑な走行とを両立することができる車速であっても良く、走行する道路の種類(高速道路か一般道路かという点や、道路の道幅や、対面走行の有無等)を考慮して定められた車速であっても良い。また、例えば、30km/h〜60km/hといった具合に、所定範囲の速度として定められていても良い。そして、肯定判定の場合には(S315:Yes)、S320に処理を移行し、否定判定の場合には(S315:No)、S305に処理を移行する。
【0037】
S320では、車速制御装置10は、ナビゲーション装置20と通信を行い、経路案内がなされる目的地が設定されているかどうかを判定する。そして、肯定判定の場合には(S320:Yes)、S325に処理を移行し、否定判定の場合には(S320:No)、S335に処理を移行する。
【0038】
S325では、車速制御装置10は、ナビゲーション装置20に対し、目的地までの案内経路を、現在の目標速度での一定速走行により走行した際の燃料の消費量を計算させる。なお、ナビゲーション装置20は、該案内経路の勾配や、該案内経路を走行する際に予測される一時停止回数等を考慮して燃料の消費量を計算しても良い。その後、車速制御装置10は、計算された燃料の消費量を取得し、現在の燃料の残量で、目標速度での一定速走行により目的地まで到達可能であるか否かを判定する。そして、肯定判定の場合には(S325:Yes)、S305に処理を移行し、否定判定の場合には(S325:No)、S330に処理を移行する。
【0039】
S330では、車速制御装置10は、ナビゲーション装置20に対し、目的地までの経路のうち最も燃料の消費が小さい経路であるエコルートを探索させ、該エコルートを低燃費速度での一定速走行により走行した際の燃料の消費量を計算させる。
【0040】
なお、ナビゲーション装置20は、自車両の特徴や道路の形状や一時停止回数等を考慮してエコルートを探索しても良い。また、既に述べたように、低燃費速度とは、走行する道路の種類を考慮して定められるものであっても良く、このような場合には、エコルートを構成する道路の種類に応じた低燃費速度での一定速走行が行われるものとして、燃料の消費量を計算しても良い。また、エコルートに替えて、例えば、目的地までの到達時間が最短となる経路等を探索し、該経路により同様の処理を行っても良い。
【0041】
そして、車速制御装置10は、S350に処理を移行する。
一方、目的地が設定されていない場合に移行するS335では、車速制御装置10は、ナビゲーション装置20に対し、最寄のガソリンスタンドを探索させ、該ガソリンスタンドを目的地として設定させる。そして、S340に処理を移行する。
【0042】
S340では、車速制御装置10は、ナビゲーション装置20に対し、目的地となった最寄のガソリンスタンドまでの経路を探索させ、探索されたいずれかの経路を目標速度での一定速走行により走行した際の燃料の消費量を計算させる。その後、計算された燃料の消費量を取得し、現在の燃料の残量で、現在の目標速度での一定速走行により最寄のガソリンスタンドまで到達可能であるか否かを判定する。そして、肯定判定の場合には(S340:Yes)、S305に処理を移行し、否定判定の場合には(S340:No)、S345に処理を移行する。
【0043】
S345では、車速制御装置10は、ナビゲーション装置20に対し、最寄のガソリンスタンドまでの経路のうち最も燃料の消費が小さい経路であるエコルートを探索させ、該エコルートを低燃費速度での一定速走行により走行した際の燃料の消費量を計算させる。そして、車速制御装置10は、S350に処理を移行する。
【0044】
S350では、車速制御装置10は、S330或いはS345にて算出された燃料の消費量を取得すると共に、該消費量と現在の燃料の残量とを比較し、低燃費速度での一定速走行でエコルートを走行した際に、ドライバ等が設定した目的地や最寄のガソリンスタンドまで到達可能かどうかを判定する。そして、肯定判定の場合には(S350:Yes)、S355に処理を移行し、否定判定の場合には(S350:No)、S380に処理を移行する。
【0045】
S355では、車速制御装置10は、メータ制御装置60を介して、低燃費速度を推奨速度として提示する。
具体的には、車速制御装置10は、メータ制御装置60に対し推奨速度(低燃費速度)と現在の目標速度とを送信する。そして、図3(a)に記載されているように、速度メータパネル400に設けられたLCDにより、推奨速度401や現在の目標速度402を表示させると共に、タコメータパネル410に設けられたLCDにより、燃料の消費を抑えた状態での走行が可能となるエンジン回転数の範囲411を表示させても良い。また、速度メータパネル400に設けられたLCDの下方に、現在の目標速度で一定速走行を行った場合の移動可能距離403と、推奨速度で一定速走行を行った場合の移動可能距離404とを表示させても良い。
【0046】
また、図3(b)に記載されているように、速度メータパネル420に設けられたLCDにより、推奨速度421や現在の目標速度422を表示させても良い。
なお、図3(a)は、高速道路を走行する際の低燃費速度を推奨速度として表示した例であり、図3(b)は、一般道路を走行する際の低燃費速度を推奨速度として表示した例である。また、これ以外にも、例えば、ナビゲーション装置20のディスプレイにより推奨速度を提示しても良いし、音声により推奨速度を提示しても良い。
【0047】
そして、車速制御装置10は、S360に処理を移行する。
S360では、車速制御装置10は、ナビゲーション装置20に対し、S330或いはS345にて探索されたエコルートを表示させる。なお、このとき、車速制御装置10は、ナビゲーション装置20に対し、現在の燃料の残量,低燃費速度,目標速度,自車両の燃費等を送信し、低燃費速度での一定速走行によりエコルートを走行した際の移動距離に対する燃料の減り具合と、目標速度での一定速走行によりエコルートを走行した際の移動距離に対する燃料の減り具合とを算出させる。そして、ナビゲーション装置20のディスプレイに、低燃費速度での走行時と目標速度での走行時における、移動距離に対する燃料の減り具合を示すグラフを表示させる(図3(c))。該グラフを表示させた後、車速制御装置10は、S365に処理を移行する。
【0048】
S365では、車速制御装置10は、操作機40を介して受け付けた操作に応じて、推奨速度(低燃費速度)を目標速度として新たに設定するかどうかを決定する。そして、推奨速度を目標速度とする場合には(S365:Yes)、S370に処理を移行し、推奨速度を目標速度としない場合には(S365:No)、S380に処理を移行する。
【0049】
S370では、車速制御装置10は、推奨速度(低燃費速度)を目標速度とした一定速走行を開始すると共に、ナビゲーション装置20に対してエコルートの経路案内を開始させ(S375)、本処理を終了する。
【0050】
低燃費速度での一定速走行を行っても目的地に到達できない場合や、推奨速度(低燃費速度)が目標速度として設定されなかった場合に移行するS380では、車速制御装置10は、ナビゲーション装置20やメータ制御装置60等を介して、目的地に到達する前に燃料切れとなる危険性についての警告を行い、本処理を終了する。
【0051】
(2)安全速度提示処理について
まず、現在の気象状況や、走行中の道路の路面の状態や、ドライバの視界等といった自車両の周辺の環境に応じて一定速走行における推奨速度を提示する安全速度提示処理について、図4のフローチャートを用いて説明する。本処理は、自車両の運転開始時に起動される処理である。
【0052】
S505では、オートクルーズシステム1の車速制御装置10は、現在の気象状況や、走行中の道路の路面の状態や、ドライバの視界等を検出し、検出結果に応じた安全速度を設定する。
【0053】
具体的には、車速制御装置10は、例えば、カメラ70により撮影された自車両周辺の映像に基づき気象状況を検出しても良いし、オーディオ90により受信したデジタルラジオ放送等から得た交通情報により気象状況を検出しても良いし、図示しない雨滴センサ,温度センサ,湿度センサ等により気象状況を検出しても良い。そして、気象状況に応じて、安全速度を設定しても良い。
【0054】
また、例えば、上述の気象状況やカメラ70により撮影された映像に基づき路面の状態(路面の凍結の有無や、路面の湿り具合や、路面の舗装の有無等)を検出し、路面の状態に応じた安全速度を設定しても良い。また、例えば、上述の気象状況や、図示しない照度センサ等により検知された自車両周辺の明るさや、現在の時間帯等に基づき、ドライバの視界がどの程度かを検出し、該視界に応じて安全速度を設定しても良い。また、ドライバの視界や気象状況や路面の状態を総合的に判断して安全速度を設定しても良い。
【0055】
なお、安全速度とは、安全且つ円滑な走行が可能となる車速であっても良く、走行する道路の種類(高速道路か一般道路かという点や、道路の道幅や、対面走行の有無等)を考慮して定められた車速であっても良い。また、例えば、30km/h〜60km/hといった具合に、所定範囲の速度として定められていても良い。そして、車速制御装置10は、S510に処理を移行する。
【0056】
S510では、車速制御装置10は、一定速走行中であるか否かを判定し、肯定判定の場合には(S510:Yes)、S515に、否定判定の場合には(S510:No)、S505に処理を移行する。
【0057】
S515では、車速制御装置10は、現在の目標速度が安全速度を上回るかどうかを判定し、肯定判定の場合には(S515:Yes)、S520に処理を移行し、否定判定の場合には(S515:No)、S505に処理を移行する。
【0058】
S520では、車速制御装置10は、S505での検出結果に基づき、気象状況の悪化や、路面不良や、視界の悪化等が生じているかどうかを判定し、肯定判定の場合には(S520:Yes)、S525に処理を移行し、否定判定の場合には(S520:No)、S505に処理を移行する。
【0059】
S525では、車速制御装置10は、メータ制御装置60を介して、安全速度を推奨速度として提示する。具体的には、車速制御装置10は、メータ制御装置60に対し安全速度と現在の目標速度とを送信し、図5に記載されているように、速度メータ430のパネルに設けられたLCDにより、安全速度431や現在の目標速度432を表示させても良い。そして、車速制御装置10は、S530に処理を移行する。
【0060】
S530では、車速制御装置10は、操作機40を介して受け付けた操作に応じて、推奨速度(安全速度)を目標速度として新たに設定するかどうかを決定する。そして、推奨速度を目標速度とする場合には(S530:Yes)、S535に処理を移行し、推奨速度を目標速度としない場合には(S530:No)、S540に処理を移行する。
【0061】
S535では、車速制御装置10は、推奨速度(安全速度)を目標速度とした一定速走行を開始し、本処理を終了する。
一方、S540では、車速制御装置10は、ナビゲーション装置20やメータ制御装置60等を介して、自車両の周辺環境の悪化により、現在の目標速度での一定速走行では、運転に支障をきたす危険性があることの警告を行い、本処理を終了する。
【0062】
[効果]
本実施形態のオートクルーズシステム1によれば、燃料の残量が低下し、現状の目標速度での一定速走行では目的地に到達できないという状況になったときに、ドライバに低燃費速度を把握させ、該低燃費速度を目標速度として設定させることができる。このため、一定速走行による運転中に燃料が切れ、自車両が立ち往生してしまうといった事態の発生を防ぐことができる。
【0063】
また、自車両周辺の気象状況や、路面状態や、視界等といった自車両周辺の環境に応じた推奨速度を提示し、該推奨速度を目標速度として設定させることができる。このため、自車両周辺の環境が悪化した場合であっても、一定速走行による運転を円滑に行うことができる。
【0064】
[他の実施形態]
(1)本実施形態のオートクルーズシステム1では、車速制御装置10,ナビゲーション装置20,操作機40,車速センサ50等が異なる装置として設けられているが、これらの装置を一つの装置として設けても良い。このような場合であっても、同様の効果を得ることができる。
【0065】
(2)また、本実施形態のオートクルーズシステム1は、ガソリン等を燃料とするエンジンにより駆動される車両に搭載されているが、例えば、電気自動車やハイブリッド車等に搭載されていても良い。そして、オートクルーズシステム1が電気自動車に搭載されている場合であれば、燃料の残量に替えて、該電気自動車を駆動するモータに電力を供給するバッテリの残量に応じて推奨速度の提示等を行うと良い。また、オートクルーズシステム1がハイブリッド車に搭載されている場合であれば、該ハイブリッド車を駆動するエンジンの燃料の残量、及び、モータに電力を供給するバッテリの残量に応じて、推奨速度の提示等を行うと良い。このような場合であっても、同様の効果を得ることができる。
【0066】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲の記載に用いた用語との対応を示す。
【0067】
オートクルーズシステム1が車速制御システムに、オートクルーズシステム1が搭載された車両のエンジンが駆動装置に、エンジンの燃料がエネルギーに相当する。また、車速制御装置10が設定手段に相当し、ナビゲーション装置20が走行経路特定手段,エコルート特定手段に相当する。
【0068】
また、自車両の燃料の残量や、自車両の周辺環境(気象状況や、走行中の道路の路面の状態や、ドライバの視界等)が、走行状態に相当する。
また、低燃費速度提示処理のS305や安全速度提示処理のS505が検知手段に、低燃費速度提示処理のS355,S360,S375や安全速度提示処理のS525が提示手段に相当する。
【0069】
また、低燃費速度提示処理のS325,S340が到達可否判定手段に、S350がエコルート判定手段に、S360が減少度合い算出手段に、S380が警告手段に相当する。
【符号の説明】
【0070】
1…オートクルーズシステム、10…車速制御装置、11…制御部、12…車内LAN通信部、13…記憶部、20…ナビゲーション装置、30…レーザレーダ、40…操作機、50…車速センサ、60…メータ制御装置、70…カメラ、80…燃料残量検知装置、90…オーディオ、100…エンジン制御装置、110…ブレーキ制御装置、200…車内LAN、400…速度メータパネル、401…推奨速度、402…現在の目標速度、403…移動可能距離、404…移動可能距離、410…タコメータパネル、411…エンジン回転数の範囲、420…速度メータパネル、421…推奨速度、422…現在の目標速度、430…速度メータ、431…安全速度、432…現在の目標速度。
【技術分野】
【0001】
本発明は、自車両の車速を一定の速度に維持する車速制御システムに関する。
【背景技術】
【0002】
自車両の車速を自動制御することで、ドライバによるアクセル操作の手間を省くオートクルーズが知られている。このオートクルーズでは、ドライバにより設定された目標速度を維持するという方法や、特許文献1に記載されているように、自車両の前方を走行する先行車両との間の車間距離を維持するように車速を自動調整するといった方法により、車速の自動制御が行われる。特許文献1には、自車両の左右或いは後方を走行する他の車両との間の車間距離に基づき先行車両と自車両との間の車間距離を設定し、該車間距離を維持するよう自車両の車速を自動調整することが記載されている。こうすることで、先行車両との間に周辺状況に応じた適切な車間距離を取ることができ、ドライバの運転疲労を低減することができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−189055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このように、従来のオートクルーズでは、ドライバからの指示や自車両周辺を走行する車両に応じて車速が設定されていたが、自車両の燃料の残量や自車両周辺の気象状況等を考慮して車速が設定されることは無かった。このため、燃料の残量が残り少なくなった場合や、気象状況が悪化した場合等には、運転に支障をきたすおそれがあった。
【0005】
本願発明は上記課題に鑑みてなされたものであり、オートクルーズによる運転をより円滑に行うことが可能となる車速制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題に鑑みてなされた請求項1に記載の発明は、自車両が目標速度を維持して走行する一定速走行を行うため、車速が目標速度となるように当該自車両を駆動する駆動装置を自動制御する車速制御システムに関するものであり、外部からの指示に応じて目標速度を設定する設定手段と、一定速走行を行う自車両の走行状態を検知する検知手段と、検知手段により検知された走行状態に応じた自車両の推奨速度を提示する提示手段と、を備えることを特徴とする。
【0007】
こうすることにより、ドライバに対し、現在の走行状態に応じた適切な車速を把握させ、一定速走行(目標速度を維持した状態で自車両を走行させる方法でのオートクルーズ)における目標速度として設定させることが可能となる。このため、一定速走行の際に適切な車速を維持して自車両を走行させることが可能となり、一定速走行による運転をより円滑に行うことができる。
【0008】
具体的には、車速制御システムは、自車両に蓄えられた駆動装置のエネルギーの残量を、走行状態として検知し、エネルギーの残量が低下した場合に、エネルギーを効率良く消費することができる車速である低燃費速度を、推奨速度として提示しても良い(請求項2)。
【0009】
こうすることにより、エネルギーの残量が低下した際に、ドライバに低燃費速度を把握させ、低燃費速度を目標速度として設定させることができる。このため、一定速走行による運転中にエネルギーが切れ、自車両が立ち往生してしまうといった事態の発生を防ぐことができる。
【0010】
さらに、請求項3に記載されているように、車速制御システムは、地図データに基づき自車両の目的地までの走行経路を特定する走行経路特定手段と、走行経路に基づき、検知手段により検知されたエネルギーの残量で、現在の目標速度での一定速走行により目的地まで到達できるかどうかを判定する到達可否判定手段と、を備え、提示手段は、到達可否判定手段により目的地まで到達できないと判定される程度にエネルギーの残量が低下した場合に、低燃費速度を推奨速度として提示しても良い。
【0011】
こうすることにより、一定速走行による運転中にエネルギーが切れ、目的地に到達できなくなってしまうといった事態の発生を防ぐことができる。
なお、目的地とは、ドライバにより設定されたものであっても良く(請求項4)、こうすることで、一定速走行によりドライバの行きたい場所まで確実に移動することが可能となる。
【0012】
また、目的地とは、ガソリンスタンド等といった駆動装置のエネルギーを供給することができる場所であっても良く(請求項5)、こうすることで、一定速走行によりガソリンスタンド等まで確実に移動し、自車両にエネルギーを補給することが可能となる。
【0013】
また、エネルギーの残量が少なくなってきた場合には、目的地までの移動に要するエネルギーをなるべく抑えることが望ましい。
そこで、請求項6に記載の車速制御システムは、地図データに基づき、目的地までの走行によるエネルギーの消費を最も抑えることができる経路であるエコルートを特定するエコルート特定手段をさらに備え、提示手段は、エコルートをさらに提示する。
【0014】
こうすることにより、低燃費速度での一定速走行によりエコルートに沿った運転を行うことが可能となり、目的地までの移動に要するエネルギーを抑えることが可能となる。このため、エネルギーの残量が少ない場合に、より確実に一定速走行により目的地に到達することができる。
【0015】
また、エコルートを低燃費速度で走行しても設定した目的地やガソリンスタンド等まで走行できない程度に、エネルギーの残量が低下してしまう場合もある。
そこで、請求項7に記載の車速制御システムは、エコルートに基づき、検知手段により検知されたエネルギーの残量で、低燃費速度での一定速走行により目的地まで到達できるかどうかを判定するエコルート判定手段と、エコルート判定手段により目的地に到達できないと判定された場合に、警告を行う警告手段とを備える。
【0016】
こうすることにより、ドライバに対し、エネルギーが尽きる前に、エネルギー不足により設定した目的地やガソリンスタンド等への到達が不可能となったことを知らせることができ、ドライバは、早期に目的地等に到達できないことに対しての対策を講じることができる。
【0017】
また、低燃費速度を推奨速度として提示すると、ドライバは、現在のエネルギーの残量で、低燃費速度での一定速走行により設定した目的地やガソリンスタンド等まで到達可能であると認識しまうおそれがある。
【0018】
そこで、請求項8に記載の車速制御システムは、提示手段は、到達可否判定手段により目的地まで到達できないと判定される程度にエネルギーの残量が低下し、尚且つ、エコルート判定手段により目的地に到達できると判定された場合に、低燃費速度を推奨速度として提示する。
【0019】
こうすることにより、エネルギーが不足して目的地等への到達が不可能となった場合(すなわち、低燃費速度での一定速走行によりエコルートを走行しても目的地等に到達できない場合)には、低燃費速度の提示を行わなくすることができる。このため、エネルギー不足により目的地等への到達が不可能となった場合に、ドライバに対し、目標速度を低燃費速度に設定してエコルートに沿って走行すれば目的地等に到達できる、という誤解を与えてしまうことを防ぐことができる。
【0020】
また、請求項9に記載されているように、目標速度での一定速走行により走行した場合のエネルギーの減少度合いと、低燃費速度での一定速走行により走行した場合のエネルギーの減少度合いとを算出する減少度合い算出手段をさらに備え、提示手段は、減少度合い算出手段により算出された、目標速度での一定速走行と、低燃費速度での一定速走行とについてのエネルギーの減少度合いをさらに提示しても良い。
【0021】
こうすることにより、ドライバは、推奨速度(低燃費速度)での一定速走行により、自車両の走行距離がどの程度伸びるかを容易に把握することができ、低燃費速度を目標速度として設定することをより強く促すことができる。
【0022】
また、気象状況が悪化した場合等や、舗装されていない道路の走行を開始した場合等のように、自車両周辺の環境が悪化した場合には、現状の目標速度での一定速走行による運転が困難となってしまう場合がある。
【0023】
そこで、請求項10〜12に記載の車速制御システムは、自車両周辺における気象状況や、自車両が走行している道路の路面の状態や、自車両周辺の視界を、走行状態として検知する。
【0024】
こうすることにより、ドライバに対し、自車両周辺の環境に応じた推奨速度を提示し、該推奨速度を目標速度として設定させることができる。このため、自車両周辺の環境が悪化した場合であっても、一定速走行による運転を円滑に行うことができる。
【図面の簡単な説明】
【0025】
【図1】オートクルーズシステムの構成や、車速制御装置の構成を示すブロック図である。
【図2】低燃費速度提示処理のフローチャートである。
【図3】推奨速度(低燃費速度)や燃料の減少度合いの提示例を示す説明図である。
【図4】安全速度提示処理のフローチャートである。
【図5】推奨速度(安全速度)の提示例を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について図面を用いて説明する。なお、本発明の実施の形態は、下記の実施形態に何ら限定されることはなく、本発明の技術的範囲に属する限り種々の形態を採りうる。
【0027】
[構成の説明]
図1は、ガソリン等を燃料とするエンジンにより駆動される自車両の車速を自動制御する本実施形態のオートクルーズシステム1の構成を示すブロック図である。このオートクルーズシステム1は、自車両前方を走行する先行車両との車間距離を一定に保つように車速を自動調整する方法や、ドライバにより設定された目標速度を維持して自車両を走行させるといった方法により、オートクルーズが行われる。また、このオートクルーズシステム1は、自車両の車速を調整するためにエンジンやブレーキを制御する車速制御装置10と、地図データに基づき目的地までの経路を探索し、経路案内を行うナビゲーション装置20と、先行車両との間の車間距離を計測するレーザレーダ30と、ジョグダイヤルや各種スイッチから構成された操作機40と、自車両の車速を検知する車速センサ50等から構成されており、これらの装置は、車内LAN200を介して互いに接続されている。
【0028】
なお、車内LAN200には、さらに、メータを制御するメータ制御装置60と、自車両周辺を撮影するカメラ70と、自車両の燃料の残量を検知する燃料残量検知装置80と、テレビやラジオ等を備える周知のオーディオ90と、エンジンの作動状態を制御するエンジン制御装置100と、ブレーキの作動状態を制御するブレーキ制御装置110等が接続されている。
【0029】
また、車速制御装置10は、CPU、ROM、RAM、I/O及びこれらを接続するバスライン等からなる周知のマイクロコンピュータを中心に構成され、ROMに記憶されたプログラムに従い当該車速制御装置10を統括制御する制御部11と、車内LAN200を介して他の装置と通信を行う車内LAN通信部12と、フラッシュメモリ等といった記憶保持動作が不要なデバイスから構成され、各種情報を記憶することができる記憶部13等から構成されている。
【0030】
[動作の説明]
次に、ドライバにより設定された目標速度を維持した状態で自車両を走行させる方法でのオートクルーズ(一定速走行)を行う際のオートクルーズシステム1の動作について説明する。
【0031】
一定速走行の際には、車速制御装置10の制御部11は、操作機40を介して受け付けた操作に応じて目標速度を設定する。そして、車内LAN200を介して、車速センサ50から自車両の車速を受信すると共に、エンジン制御装置100やブレーキ制御装置110等に各種コマンドを送信し、自車両が目標速度を維持して走行するよう、エンジンの回転数やブレーキの作動状態や変速比等を制御する。
【0032】
また、これに加えて、自車両の燃料の残量や自車両周辺の天候等といった走行状態に基づき、現状の目標速度により一定速走行を行った場合に走行に支障をきたすかどうかを判定し、支障をきたすと判定した場合には、推奨速度を提示して目標速度を推奨速度に設定するように促す。以下では、自車両の走行状態に応じた推奨速度を提示する処理について説明する。
【0033】
(1)低燃費速度提示処理について
まず、自車両の燃料の残量に応じて一定速走行における推奨速度を提示する低燃費速度提示処理について、図2のフローチャートを用いて説明する。本処理は、自車両の運転開始時に起動される処理である。
【0034】
S305では、オートクルーズシステム1の車速制御装置10の制御部11は、車内LAN200を介して、燃料残量検知装置80から自車両の燃料の残量を取得し、S310に処理を移行する。なお、以後、車速制御装置10の制御部11が行う処理を、単に車速制御装置10が行う処理として記載する。
【0035】
S310では、車速制御装置10は、一定速走行中であるか否かを判定し、肯定判定の場合には(S310:Yes)、S315に、否定判定の場合には(S310:No)、S305に処理を移行する。
【0036】
S315では、車速制御装置10は、現在の目標速度が、燃料を効率良く消費できる(換言すれば、燃料の所定分量当りの走行可能距離が長くなる)車速である低燃費速度を上回るかどうかを判定する。なお、低燃費速度とは、燃料の消費効率の良さと、安全且つ円滑な走行とを両立することができる車速であっても良く、走行する道路の種類(高速道路か一般道路かという点や、道路の道幅や、対面走行の有無等)を考慮して定められた車速であっても良い。また、例えば、30km/h〜60km/hといった具合に、所定範囲の速度として定められていても良い。そして、肯定判定の場合には(S315:Yes)、S320に処理を移行し、否定判定の場合には(S315:No)、S305に処理を移行する。
【0037】
S320では、車速制御装置10は、ナビゲーション装置20と通信を行い、経路案内がなされる目的地が設定されているかどうかを判定する。そして、肯定判定の場合には(S320:Yes)、S325に処理を移行し、否定判定の場合には(S320:No)、S335に処理を移行する。
【0038】
S325では、車速制御装置10は、ナビゲーション装置20に対し、目的地までの案内経路を、現在の目標速度での一定速走行により走行した際の燃料の消費量を計算させる。なお、ナビゲーション装置20は、該案内経路の勾配や、該案内経路を走行する際に予測される一時停止回数等を考慮して燃料の消費量を計算しても良い。その後、車速制御装置10は、計算された燃料の消費量を取得し、現在の燃料の残量で、目標速度での一定速走行により目的地まで到達可能であるか否かを判定する。そして、肯定判定の場合には(S325:Yes)、S305に処理を移行し、否定判定の場合には(S325:No)、S330に処理を移行する。
【0039】
S330では、車速制御装置10は、ナビゲーション装置20に対し、目的地までの経路のうち最も燃料の消費が小さい経路であるエコルートを探索させ、該エコルートを低燃費速度での一定速走行により走行した際の燃料の消費量を計算させる。
【0040】
なお、ナビゲーション装置20は、自車両の特徴や道路の形状や一時停止回数等を考慮してエコルートを探索しても良い。また、既に述べたように、低燃費速度とは、走行する道路の種類を考慮して定められるものであっても良く、このような場合には、エコルートを構成する道路の種類に応じた低燃費速度での一定速走行が行われるものとして、燃料の消費量を計算しても良い。また、エコルートに替えて、例えば、目的地までの到達時間が最短となる経路等を探索し、該経路により同様の処理を行っても良い。
【0041】
そして、車速制御装置10は、S350に処理を移行する。
一方、目的地が設定されていない場合に移行するS335では、車速制御装置10は、ナビゲーション装置20に対し、最寄のガソリンスタンドを探索させ、該ガソリンスタンドを目的地として設定させる。そして、S340に処理を移行する。
【0042】
S340では、車速制御装置10は、ナビゲーション装置20に対し、目的地となった最寄のガソリンスタンドまでの経路を探索させ、探索されたいずれかの経路を目標速度での一定速走行により走行した際の燃料の消費量を計算させる。その後、計算された燃料の消費量を取得し、現在の燃料の残量で、現在の目標速度での一定速走行により最寄のガソリンスタンドまで到達可能であるか否かを判定する。そして、肯定判定の場合には(S340:Yes)、S305に処理を移行し、否定判定の場合には(S340:No)、S345に処理を移行する。
【0043】
S345では、車速制御装置10は、ナビゲーション装置20に対し、最寄のガソリンスタンドまでの経路のうち最も燃料の消費が小さい経路であるエコルートを探索させ、該エコルートを低燃費速度での一定速走行により走行した際の燃料の消費量を計算させる。そして、車速制御装置10は、S350に処理を移行する。
【0044】
S350では、車速制御装置10は、S330或いはS345にて算出された燃料の消費量を取得すると共に、該消費量と現在の燃料の残量とを比較し、低燃費速度での一定速走行でエコルートを走行した際に、ドライバ等が設定した目的地や最寄のガソリンスタンドまで到達可能かどうかを判定する。そして、肯定判定の場合には(S350:Yes)、S355に処理を移行し、否定判定の場合には(S350:No)、S380に処理を移行する。
【0045】
S355では、車速制御装置10は、メータ制御装置60を介して、低燃費速度を推奨速度として提示する。
具体的には、車速制御装置10は、メータ制御装置60に対し推奨速度(低燃費速度)と現在の目標速度とを送信する。そして、図3(a)に記載されているように、速度メータパネル400に設けられたLCDにより、推奨速度401や現在の目標速度402を表示させると共に、タコメータパネル410に設けられたLCDにより、燃料の消費を抑えた状態での走行が可能となるエンジン回転数の範囲411を表示させても良い。また、速度メータパネル400に設けられたLCDの下方に、現在の目標速度で一定速走行を行った場合の移動可能距離403と、推奨速度で一定速走行を行った場合の移動可能距離404とを表示させても良い。
【0046】
また、図3(b)に記載されているように、速度メータパネル420に設けられたLCDにより、推奨速度421や現在の目標速度422を表示させても良い。
なお、図3(a)は、高速道路を走行する際の低燃費速度を推奨速度として表示した例であり、図3(b)は、一般道路を走行する際の低燃費速度を推奨速度として表示した例である。また、これ以外にも、例えば、ナビゲーション装置20のディスプレイにより推奨速度を提示しても良いし、音声により推奨速度を提示しても良い。
【0047】
そして、車速制御装置10は、S360に処理を移行する。
S360では、車速制御装置10は、ナビゲーション装置20に対し、S330或いはS345にて探索されたエコルートを表示させる。なお、このとき、車速制御装置10は、ナビゲーション装置20に対し、現在の燃料の残量,低燃費速度,目標速度,自車両の燃費等を送信し、低燃費速度での一定速走行によりエコルートを走行した際の移動距離に対する燃料の減り具合と、目標速度での一定速走行によりエコルートを走行した際の移動距離に対する燃料の減り具合とを算出させる。そして、ナビゲーション装置20のディスプレイに、低燃費速度での走行時と目標速度での走行時における、移動距離に対する燃料の減り具合を示すグラフを表示させる(図3(c))。該グラフを表示させた後、車速制御装置10は、S365に処理を移行する。
【0048】
S365では、車速制御装置10は、操作機40を介して受け付けた操作に応じて、推奨速度(低燃費速度)を目標速度として新たに設定するかどうかを決定する。そして、推奨速度を目標速度とする場合には(S365:Yes)、S370に処理を移行し、推奨速度を目標速度としない場合には(S365:No)、S380に処理を移行する。
【0049】
S370では、車速制御装置10は、推奨速度(低燃費速度)を目標速度とした一定速走行を開始すると共に、ナビゲーション装置20に対してエコルートの経路案内を開始させ(S375)、本処理を終了する。
【0050】
低燃費速度での一定速走行を行っても目的地に到達できない場合や、推奨速度(低燃費速度)が目標速度として設定されなかった場合に移行するS380では、車速制御装置10は、ナビゲーション装置20やメータ制御装置60等を介して、目的地に到達する前に燃料切れとなる危険性についての警告を行い、本処理を終了する。
【0051】
(2)安全速度提示処理について
まず、現在の気象状況や、走行中の道路の路面の状態や、ドライバの視界等といった自車両の周辺の環境に応じて一定速走行における推奨速度を提示する安全速度提示処理について、図4のフローチャートを用いて説明する。本処理は、自車両の運転開始時に起動される処理である。
【0052】
S505では、オートクルーズシステム1の車速制御装置10は、現在の気象状況や、走行中の道路の路面の状態や、ドライバの視界等を検出し、検出結果に応じた安全速度を設定する。
【0053】
具体的には、車速制御装置10は、例えば、カメラ70により撮影された自車両周辺の映像に基づき気象状況を検出しても良いし、オーディオ90により受信したデジタルラジオ放送等から得た交通情報により気象状況を検出しても良いし、図示しない雨滴センサ,温度センサ,湿度センサ等により気象状況を検出しても良い。そして、気象状況に応じて、安全速度を設定しても良い。
【0054】
また、例えば、上述の気象状況やカメラ70により撮影された映像に基づき路面の状態(路面の凍結の有無や、路面の湿り具合や、路面の舗装の有無等)を検出し、路面の状態に応じた安全速度を設定しても良い。また、例えば、上述の気象状況や、図示しない照度センサ等により検知された自車両周辺の明るさや、現在の時間帯等に基づき、ドライバの視界がどの程度かを検出し、該視界に応じて安全速度を設定しても良い。また、ドライバの視界や気象状況や路面の状態を総合的に判断して安全速度を設定しても良い。
【0055】
なお、安全速度とは、安全且つ円滑な走行が可能となる車速であっても良く、走行する道路の種類(高速道路か一般道路かという点や、道路の道幅や、対面走行の有無等)を考慮して定められた車速であっても良い。また、例えば、30km/h〜60km/hといった具合に、所定範囲の速度として定められていても良い。そして、車速制御装置10は、S510に処理を移行する。
【0056】
S510では、車速制御装置10は、一定速走行中であるか否かを判定し、肯定判定の場合には(S510:Yes)、S515に、否定判定の場合には(S510:No)、S505に処理を移行する。
【0057】
S515では、車速制御装置10は、現在の目標速度が安全速度を上回るかどうかを判定し、肯定判定の場合には(S515:Yes)、S520に処理を移行し、否定判定の場合には(S515:No)、S505に処理を移行する。
【0058】
S520では、車速制御装置10は、S505での検出結果に基づき、気象状況の悪化や、路面不良や、視界の悪化等が生じているかどうかを判定し、肯定判定の場合には(S520:Yes)、S525に処理を移行し、否定判定の場合には(S520:No)、S505に処理を移行する。
【0059】
S525では、車速制御装置10は、メータ制御装置60を介して、安全速度を推奨速度として提示する。具体的には、車速制御装置10は、メータ制御装置60に対し安全速度と現在の目標速度とを送信し、図5に記載されているように、速度メータ430のパネルに設けられたLCDにより、安全速度431や現在の目標速度432を表示させても良い。そして、車速制御装置10は、S530に処理を移行する。
【0060】
S530では、車速制御装置10は、操作機40を介して受け付けた操作に応じて、推奨速度(安全速度)を目標速度として新たに設定するかどうかを決定する。そして、推奨速度を目標速度とする場合には(S530:Yes)、S535に処理を移行し、推奨速度を目標速度としない場合には(S530:No)、S540に処理を移行する。
【0061】
S535では、車速制御装置10は、推奨速度(安全速度)を目標速度とした一定速走行を開始し、本処理を終了する。
一方、S540では、車速制御装置10は、ナビゲーション装置20やメータ制御装置60等を介して、自車両の周辺環境の悪化により、現在の目標速度での一定速走行では、運転に支障をきたす危険性があることの警告を行い、本処理を終了する。
【0062】
[効果]
本実施形態のオートクルーズシステム1によれば、燃料の残量が低下し、現状の目標速度での一定速走行では目的地に到達できないという状況になったときに、ドライバに低燃費速度を把握させ、該低燃費速度を目標速度として設定させることができる。このため、一定速走行による運転中に燃料が切れ、自車両が立ち往生してしまうといった事態の発生を防ぐことができる。
【0063】
また、自車両周辺の気象状況や、路面状態や、視界等といった自車両周辺の環境に応じた推奨速度を提示し、該推奨速度を目標速度として設定させることができる。このため、自車両周辺の環境が悪化した場合であっても、一定速走行による運転を円滑に行うことができる。
【0064】
[他の実施形態]
(1)本実施形態のオートクルーズシステム1では、車速制御装置10,ナビゲーション装置20,操作機40,車速センサ50等が異なる装置として設けられているが、これらの装置を一つの装置として設けても良い。このような場合であっても、同様の効果を得ることができる。
【0065】
(2)また、本実施形態のオートクルーズシステム1は、ガソリン等を燃料とするエンジンにより駆動される車両に搭載されているが、例えば、電気自動車やハイブリッド車等に搭載されていても良い。そして、オートクルーズシステム1が電気自動車に搭載されている場合であれば、燃料の残量に替えて、該電気自動車を駆動するモータに電力を供給するバッテリの残量に応じて推奨速度の提示等を行うと良い。また、オートクルーズシステム1がハイブリッド車に搭載されている場合であれば、該ハイブリッド車を駆動するエンジンの燃料の残量、及び、モータに電力を供給するバッテリの残量に応じて、推奨速度の提示等を行うと良い。このような場合であっても、同様の効果を得ることができる。
【0066】
[特許請求の範囲との対応]
上記実施形態の説明で用いた用語と、特許請求の範囲の記載に用いた用語との対応を示す。
【0067】
オートクルーズシステム1が車速制御システムに、オートクルーズシステム1が搭載された車両のエンジンが駆動装置に、エンジンの燃料がエネルギーに相当する。また、車速制御装置10が設定手段に相当し、ナビゲーション装置20が走行経路特定手段,エコルート特定手段に相当する。
【0068】
また、自車両の燃料の残量や、自車両の周辺環境(気象状況や、走行中の道路の路面の状態や、ドライバの視界等)が、走行状態に相当する。
また、低燃費速度提示処理のS305や安全速度提示処理のS505が検知手段に、低燃費速度提示処理のS355,S360,S375や安全速度提示処理のS525が提示手段に相当する。
【0069】
また、低燃費速度提示処理のS325,S340が到達可否判定手段に、S350がエコルート判定手段に、S360が減少度合い算出手段に、S380が警告手段に相当する。
【符号の説明】
【0070】
1…オートクルーズシステム、10…車速制御装置、11…制御部、12…車内LAN通信部、13…記憶部、20…ナビゲーション装置、30…レーザレーダ、40…操作機、50…車速センサ、60…メータ制御装置、70…カメラ、80…燃料残量検知装置、90…オーディオ、100…エンジン制御装置、110…ブレーキ制御装置、200…車内LAN、400…速度メータパネル、401…推奨速度、402…現在の目標速度、403…移動可能距離、404…移動可能距離、410…タコメータパネル、411…エンジン回転数の範囲、420…速度メータパネル、421…推奨速度、422…現在の目標速度、430…速度メータ、431…安全速度、432…現在の目標速度。
【特許請求の範囲】
【請求項1】
自車両が目標速度を維持して走行する一定速走行を行うため、車速が前記目標速度となるように当該自車両を駆動する駆動装置を自動制御する車速制御システムであって、
外部からの指示に応じて、前記目標速度を設定する設定手段と、
前記一定速走行を行う自車両の走行状態を検知する検知手段と、
前記検知手段により検知された前記走行状態に応じた自車両の推奨速度を提示する提示手段と、
を備えることを特徴とする車速制御システム。
【請求項2】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両に蓄えられた前記駆動装置のエネルギーの残量を、前記走行状態として検知し、
前記提示手段は、前記エネルギーの残量が低下した場合に、前記エネルギーを効率良く消費することができる車速である低燃費速度を、前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項3】
請求項2に記載の車速制御システムにおいて、
地図データに基づき自車両の目的地までの走行経路を特定する走行経路特定手段と、
前記走行経路に基づき、前記検知手段により検知された前記エネルギーの残量で、現在の前記目標速度での前記一定速走行により前記目的地まで到達できるかどうかを判定する到達可否判定手段と、
を備え、
前記提示手段は、前記到達可否判定手段により前記目的地まで到達できないと判定される程度に前記エネルギーの残量が低下した場合に、前記低燃費速度を前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項4】
請求項3に記載の車速制御システムにおいて、
前記目的地とは、ドライバにより設定されたものであること、
を特徴とする車速制御システム。
【請求項5】
請求項3に記載の車速制御システムにおいて、
前記目的地とは、前記エネルギーを自車両に供給することができる場所であること、
を特徴とする車速制御システム。
【請求項6】
請求項3から請求項5のうちのいずれか1項に記載の車速制御装置において、
前記地図データに基づき、前記目的地までの走行による前記エネルギーの消費を最も抑えることができる経路であるエコルートを特定するエコルート特定手段をさらに備え、
前記提示手段は、前記エコルートをさらに提示すること、
を特徴とする車速制御システム。
【請求項7】
請求項6に記載の車速制御システムにおいて、
前記エコルートに基づき、前記検知手段により検知された前記エネルギーの残量で、前記低燃費速度での前記一定速走行により前記目的地まで到達できるかどうかを判定するエコルート判定手段と、
前記エコルート判定手段により前記目的地に到達できないと判定された場合に、警告を行う警告手段と、
をさらに備えることを特徴とする車速制御システム。
【請求項8】
請求項7に記載の車速制御システムにおいて、
前記提示手段は、前記到達可否判定手段により前記目的地まで到達できないと判定される程度に前記エネルギーの残量が低下し、尚且つ、前記エコルート判定手段により前記目的地に到達できると判定された場合に、前記低燃費速度を前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項9】
請求項3から請求項8のうちのいずれか1項に記載の車速制御システムにおいて、
前記目標速度での前記一定速走行により走行した場合の前記エネルギーの減少度合いと、前記低燃費速度での前記一定速走行により走行した場合の前記エネルギーの減少度合いとを算出する減少度合い算出手段をさらに備え、
前記提示手段は、前記減少度合い算出手段により算出された、前記目標速度での前記一定速走行と、前記低燃費速度での前記一定速走行とについての前記エネルギーの減少度合いをさらに提示すること、
を特徴とする車速制御システム。
【請求項10】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両周辺における気象状況を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【請求項11】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両が走行している道路の路面の状態を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【請求項12】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両周辺の視界を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【請求項1】
自車両が目標速度を維持して走行する一定速走行を行うため、車速が前記目標速度となるように当該自車両を駆動する駆動装置を自動制御する車速制御システムであって、
外部からの指示に応じて、前記目標速度を設定する設定手段と、
前記一定速走行を行う自車両の走行状態を検知する検知手段と、
前記検知手段により検知された前記走行状態に応じた自車両の推奨速度を提示する提示手段と、
を備えることを特徴とする車速制御システム。
【請求項2】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両に蓄えられた前記駆動装置のエネルギーの残量を、前記走行状態として検知し、
前記提示手段は、前記エネルギーの残量が低下した場合に、前記エネルギーを効率良く消費することができる車速である低燃費速度を、前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項3】
請求項2に記載の車速制御システムにおいて、
地図データに基づき自車両の目的地までの走行経路を特定する走行経路特定手段と、
前記走行経路に基づき、前記検知手段により検知された前記エネルギーの残量で、現在の前記目標速度での前記一定速走行により前記目的地まで到達できるかどうかを判定する到達可否判定手段と、
を備え、
前記提示手段は、前記到達可否判定手段により前記目的地まで到達できないと判定される程度に前記エネルギーの残量が低下した場合に、前記低燃費速度を前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項4】
請求項3に記載の車速制御システムにおいて、
前記目的地とは、ドライバにより設定されたものであること、
を特徴とする車速制御システム。
【請求項5】
請求項3に記載の車速制御システムにおいて、
前記目的地とは、前記エネルギーを自車両に供給することができる場所であること、
を特徴とする車速制御システム。
【請求項6】
請求項3から請求項5のうちのいずれか1項に記載の車速制御装置において、
前記地図データに基づき、前記目的地までの走行による前記エネルギーの消費を最も抑えることができる経路であるエコルートを特定するエコルート特定手段をさらに備え、
前記提示手段は、前記エコルートをさらに提示すること、
を特徴とする車速制御システム。
【請求項7】
請求項6に記載の車速制御システムにおいて、
前記エコルートに基づき、前記検知手段により検知された前記エネルギーの残量で、前記低燃費速度での前記一定速走行により前記目的地まで到達できるかどうかを判定するエコルート判定手段と、
前記エコルート判定手段により前記目的地に到達できないと判定された場合に、警告を行う警告手段と、
をさらに備えることを特徴とする車速制御システム。
【請求項8】
請求項7に記載の車速制御システムにおいて、
前記提示手段は、前記到達可否判定手段により前記目的地まで到達できないと判定される程度に前記エネルギーの残量が低下し、尚且つ、前記エコルート判定手段により前記目的地に到達できると判定された場合に、前記低燃費速度を前記推奨速度として提示すること、
を特徴とする車速制御システム。
【請求項9】
請求項3から請求項8のうちのいずれか1項に記載の車速制御システムにおいて、
前記目標速度での前記一定速走行により走行した場合の前記エネルギーの減少度合いと、前記低燃費速度での前記一定速走行により走行した場合の前記エネルギーの減少度合いとを算出する減少度合い算出手段をさらに備え、
前記提示手段は、前記減少度合い算出手段により算出された、前記目標速度での前記一定速走行と、前記低燃費速度での前記一定速走行とについての前記エネルギーの減少度合いをさらに提示すること、
を特徴とする車速制御システム。
【請求項10】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両周辺における気象状況を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【請求項11】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両が走行している道路の路面の状態を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【請求項12】
請求項1に記載の車速制御システムにおいて、
前記検知手段は、自車両周辺の視界を、前記走行状態として検知すること、
を特徴とする車速制御システム。
【図1】


【図2】
【図4】
【図3】
【図5】
【図2】
【図4】
【図3】
【図5】
【公開番号】特開2012−101755(P2012−101755A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−253933(P2010−253933)
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月12日(2010.11.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]