
軌跡の信頼性判定装置及び方法及びプログラム
【課題】 入力された座標値の系列から復元される軌跡が、実際の移動の軌跡と一致するかを正確に判断する。
【解決手段】 本発明は、位置データを取得し、位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納し、所要時間記憶手段から移動に要する時間を取得し、入力された関数を用いて、位置データから復元される軌跡の信頼性スコアを算出する。算出された信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定して出力する。
【解決手段】 本発明は、位置データを取得し、位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納し、所要時間記憶手段から移動に要する時間を取得し、入力された関数を用いて、位置データから復元される軌跡の信頼性スコアを算出する。算出された信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定して出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、断続的に取得される位置データから復元される軌跡の信頼性判定装置及び方法及びプログラムに係り、特に、追跡する対象の座標値が断続的に取得される状況において、取得された座標値の系列から復元される軌跡が、対象の実際の移動の軌跡と一致するかどうかを判定するための軌跡の信頼性判定装置及び方法及びプログラムに関する。
【背景技術】
【0002】
携帯電話端末やカーナビゲーションシステムには、GPSに代表される測位機能が搭載されている。定期的に位置を記録することによって、対象の移動の軌跡を獲得することができる。獲得した軌跡を蓄積することで、行動パターンを分析する手法(例えば、非特許文献1参照)や、対象の移動を予測する手法(例えば、非特許文献2参照)などが提案されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Fosca Giannotti, Mirco Nanni, Dino Pedreschi, and Fabio Pinelli, "Trajectory Pattern Mining", In Proc. of KDD 07, the 13th international conference on knowledge discovery and data mining, pp 330 - 339,2007.
【非特許文献2】Anna Monreale, Fabio Pinelli, Roberto Trasarti, and Fosca Gionnotti, "WhereNext: a Location Predictor on Trajectory Pattern Mining", In Proc. of KDD 09, the 15th ACM SIGKDD conference on knowledge discovery and data mining, pp 637 - 645, 2009.
【発明の概要】
【発明が解決しようとする課題】
【0004】
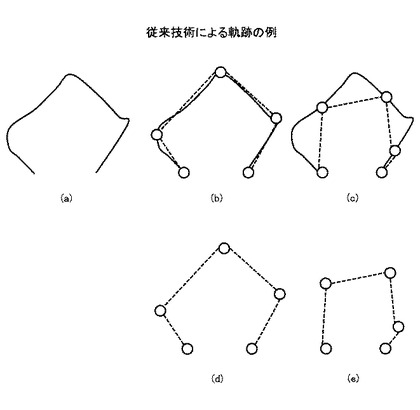
しかしながら、追跡対象の位置を定期的に記録することができない場合には、観測点の系列より復元される軌跡が、実際の対象の移動軌跡を正確に反映していない可能性がある。例を用いて説明する。対象が図1の(a)の実線に示すような経路によって移動し、それぞれ(b)および(c)の白い円の位置において測位が行われたとする。すると、(b)のように測位が行われたときには(d)のように実際の経路をほぼ復元することができるが、(c)のように測位が行われた場合は、復元された経路は(e)のようになり、元の軌跡(a)とは異なるものとなる。
【0005】
復元される軌跡が実際の軌跡と異なる場合、復元された軌跡に基づく予測は誤ったものになる。そこで、復元された軌跡が実際の軌跡と一致するかどうかを判別した上で、実際の軌跡を復元できない場合には予測に利用しないことが必要となる。
【0006】
復元された軌跡の信頼性を判定する方法としては、位置計測の頻度を利用し、頻度が低いデータは利用しないというものが考えられるであろう。しかし、この方法では位置計測の頻度が低いデータは利用できないため、利用できるデータが少なくなり、軌跡を用いた各種処理で有用な結果を得るために十分な量のデータを確保できないという問題があった。
【0007】
本発明は、上記の点に鑑みなされたもので、入力された座標値の系列から復元される軌跡が、実際の移動の軌跡と一致するかを正確に判断することが可能な軌跡の信頼性判定装置及び方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明(請求項1)は、断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定装置であって、
前記位置データを取得する位置入力手段と、
前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算手段と、
前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出手段と、
前記スコア算出手段で求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定手段と、を有する。
【0009】
また、本発明(請求項2)は、前記スコア算出手段で用いる前記関数S(t,t')の値が大きいほど、2つの実数値t,t'とが近い値をとる。
【発明の効果】
【0010】
本発明によれば、断続的に取得された座標値からなる系列より、移動軌跡を復元する問題において、座標値取得の時間間隔が広い場合であっても、正しく軌跡を復元できる可能性が高い場面を識別することができるようになる。その結果として、断続的に取得された位置データ群からより大量の軌跡を抽出することが可能となり、軌跡を利用した分析で有用な結果を得ることができる。
【図面の簡単な説明】
【0011】
【図1】従来技術による軌跡の例である。
【図2】本発明の一実施の形態における判定装置の構成図である。
【図3】本発明の一実施の形態における入力データの例である。
【図4】本発明の一実施の形態における判定装置の全体動作のフローチャートである。
【図5】本発明の一実施の形態における信頼性判定処理フローチャートである。
【発明を実施するための形態】
【0012】
以下図面と共に、本発明の実施の形態を説明する。
【0013】
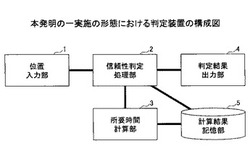
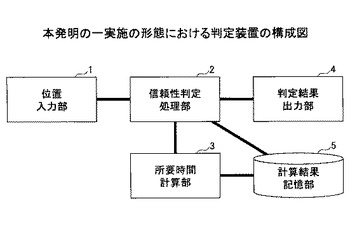
図2は、本発明の一実施の形態における判定装置の構成を示す。
【0014】
判定装置は、位置入力部1、信頼性判定処理部2、所要時間計算部3、判定結果出力部4、計算結果記憶部5から構成される。
【0015】
以下に、上記の各構成要素の処理を説明する。
【0016】
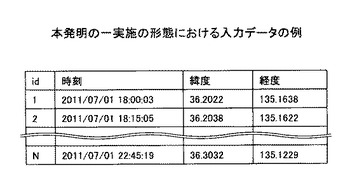
まず、位置入力部1では、外部より得られた位置情報を入力として受け取り、それを信頼性判定処理部2に渡す。位置情報は、例えば端末自身がGPS等を用いて測位してもよいし、携帯電波の基地局の位置情報を用いて測位した結果を携帯電話の事業者等から伝える形式でも構わない。受け取った位置情報は、2次元の位置(以下では緯度,経度とする)および観測された時刻の三つ組の系列である。位置情報の例を図3に示す。以下、位置情報をZ=(z1,z2,…,zN)とする。ziは二次元の実数ベクトルzi=(xi,yi)とする。また、t1,t2,…,tNをそれぞれz1,z2,…,zNが観測された時刻を表すものとする。ここで、1≦i<j≦Nのときに、常にti<tjが成り立つものとする。
【0017】
次に、信頼性判定処理部2では、位置情報入力部1から位置情報を受取り、後述する図5のフローに示す信頼性判定処理を実行し、位置情報入力部1から入力された位置情報の系列が、信頼できる軌跡であるかどうかを出力する。その途中の処理として、所要時間計算部3に位置データのペアを渡し、計算結果を計算結果記憶部5から受け取る。
【0018】
所要時間計算部3では、信頼性判定処理部2より任意の2次元座標の組を入力として受け取り、その2点間を移動するのに必要な所要時間を計算し、計算結果記憶部5に出力する。以下では、T(z,z')を点zからz'へ移動する際に必要な時間を表すものとする。2点間の移動に必要な所要時間の計算方法は幾通りか考えられる。例えば、zとz'との距離を利用して、
【0019】
【数1】

として定義してもよい。ここでθはパラメータであり、また、
【0020】
【数2】
とする。また、カーナビゲーションシステムで用いられる経路検索システムを用いてzとz'の所要時間を計算して出力するものとしてT(z,z')を定義してもよい。また、鉄道の乗り換え案内システムを用いてT(z,z')を定義してもよい。なお、その場合は、zとz'の座標より、最寄りの駅を求めて、それらの間の所要時間を計算することになる。
【0021】
計算結果記憶部5では、所要時間計算部3において計算された、2点間の移動にかかる時間(非負の実数)が記憶される。計算結果記憶部5にはN-1個の非負の実数を記憶する領域を準備する。計算結果記憶部5に格納された値は、信頼性判定処理部2から参照される。
【0022】
判定結果出力部4では、信頼性判定処理部2より渡された判定結果を出力する。
【0023】
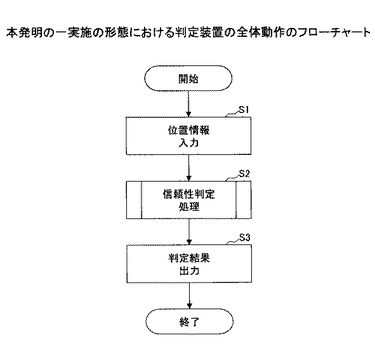
上記の一連の動作を図4のフローチャートを用いて説明する。
【0024】
ステップ1)位置入力部1より位置データが入力される。
【0025】
ステップ2)次に、信頼性判定処理部2において信頼性判定処理を実行する。信頼性判定処理は、2点間の距離に応じて、時間差を算出する(歩行、電車などを想定して速度を決定することにより距離から時間差を求めることができる)。この時間差が実際の時間差と略同じであれば、正しい軌跡と見做し、そうでない場合は、寄り道などが考えられるため、対象とする実際の軌跡ではないと判断する。
【0026】
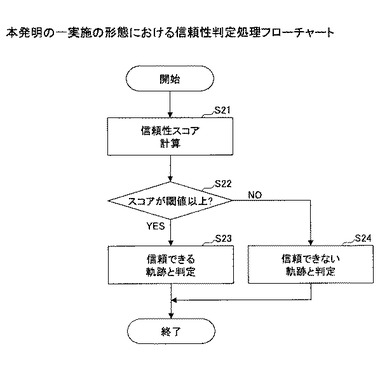
以下、信頼性判定処理について、当該ステップ2の処理を図5に示すフローチャートを用いて説明する。
【0027】
ステップ21)入力された位置データから復元される軌跡の信頼性スコアを計算する。スコアの計算式を示す前に、軌跡Zに対する信頼性スコアR(Z)を、T(z,z')を用いて、信頼性スコアR(Z)を、
【0028】
【数3】
として定義する。ここで、S(t,t')は、2つの実数値を受け取り、それらが一致している度合いを返す関数である。S(t,t')の値が大きいほど、tとt'とが近い値をとるものとする。
【0029】
S(t,t')にはいくつかの実装が考えられるが、例えば、
【0030】
【数4】
とすれば条件を満たす。ここでσはパラメータであり、事前に設定するものとする。
【0031】
ステップ22)上記で計算したR(Z)が事前に設定したしきい値よりも大きいかどうかを判定する。しきい値よりもスコアが大きいならば、ステップ23に移行し、しきい値よりもスコアが小さいならば、ステップ24に移行する。
【0032】
ステップ23) 信頼できる軌跡と判定し、処理を終了する。
【0033】
ステップ24) 信頼できない軌跡と判定し、処理を終了する。
【0034】
ステップ3)信頼性判定処理部3の信頼性判定処理終了後、判定結果を判定結果出力部4より出力し、処理を終了する。
【0035】
上記のように、本発明では、任意の2点の位置間を移動する際にかかる時間を条件として、復元された軌跡の信頼性を判定する。もし、2点間の移動に想定された時間がかかっていたならば、実際の軌跡は2点間を結んだ軌跡と一致する可能性が高い。一方、想定されたよりも時間がかかっていたならば、対象は2点間を結ぶ軌跡と異なる軌跡をとっていた可能性が高いため、復元された軌跡の信頼性は下がる。この手法を用いることによって、位置計測の頻度が低い場合であっても、信頼性の高い軌跡を判別することが可能となる。
【0036】
また、本発明は、上記の図2に示す判定装置の各構成要素の動作をプログラムとして構築し、判定装置として利用されるコンピュータにインストールして実行させる、または、ネットワークを介して流通させることが可能である。
【0037】
なお、本発明は、上記の実施の形態に限定されることなく、特許請求の範囲内において、種々変更・応用が可能である。
【符号の説明】
【0038】
1 位置入力部
2 信頼性判定処理部
3 所要時間計算部
4 判定結果出力部
5 計算結果記憶部
【技術分野】
【0001】
本発明は、断続的に取得される位置データから復元される軌跡の信頼性判定装置及び方法及びプログラムに係り、特に、追跡する対象の座標値が断続的に取得される状況において、取得された座標値の系列から復元される軌跡が、対象の実際の移動の軌跡と一致するかどうかを判定するための軌跡の信頼性判定装置及び方法及びプログラムに関する。
【背景技術】
【0002】
携帯電話端末やカーナビゲーションシステムには、GPSに代表される測位機能が搭載されている。定期的に位置を記録することによって、対象の移動の軌跡を獲得することができる。獲得した軌跡を蓄積することで、行動パターンを分析する手法(例えば、非特許文献1参照)や、対象の移動を予測する手法(例えば、非特許文献2参照)などが提案されている。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Fosca Giannotti, Mirco Nanni, Dino Pedreschi, and Fabio Pinelli, "Trajectory Pattern Mining", In Proc. of KDD 07, the 13th international conference on knowledge discovery and data mining, pp 330 - 339,2007.
【非特許文献2】Anna Monreale, Fabio Pinelli, Roberto Trasarti, and Fosca Gionnotti, "WhereNext: a Location Predictor on Trajectory Pattern Mining", In Proc. of KDD 09, the 15th ACM SIGKDD conference on knowledge discovery and data mining, pp 637 - 645, 2009.
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、追跡対象の位置を定期的に記録することができない場合には、観測点の系列より復元される軌跡が、実際の対象の移動軌跡を正確に反映していない可能性がある。例を用いて説明する。対象が図1の(a)の実線に示すような経路によって移動し、それぞれ(b)および(c)の白い円の位置において測位が行われたとする。すると、(b)のように測位が行われたときには(d)のように実際の経路をほぼ復元することができるが、(c)のように測位が行われた場合は、復元された経路は(e)のようになり、元の軌跡(a)とは異なるものとなる。
【0005】
復元される軌跡が実際の軌跡と異なる場合、復元された軌跡に基づく予測は誤ったものになる。そこで、復元された軌跡が実際の軌跡と一致するかどうかを判別した上で、実際の軌跡を復元できない場合には予測に利用しないことが必要となる。
【0006】
復元された軌跡の信頼性を判定する方法としては、位置計測の頻度を利用し、頻度が低いデータは利用しないというものが考えられるであろう。しかし、この方法では位置計測の頻度が低いデータは利用できないため、利用できるデータが少なくなり、軌跡を用いた各種処理で有用な結果を得るために十分な量のデータを確保できないという問題があった。
【0007】
本発明は、上記の点に鑑みなされたもので、入力された座標値の系列から復元される軌跡が、実際の移動の軌跡と一致するかを正確に判断することが可能な軌跡の信頼性判定装置及び方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明(請求項1)は、断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定装置であって、
前記位置データを取得する位置入力手段と、
前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算手段と、
前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出手段と、
前記スコア算出手段で求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定手段と、を有する。
【0009】
また、本発明(請求項2)は、前記スコア算出手段で用いる前記関数S(t,t')の値が大きいほど、2つの実数値t,t'とが近い値をとる。
【発明の効果】
【0010】
本発明によれば、断続的に取得された座標値からなる系列より、移動軌跡を復元する問題において、座標値取得の時間間隔が広い場合であっても、正しく軌跡を復元できる可能性が高い場面を識別することができるようになる。その結果として、断続的に取得された位置データ群からより大量の軌跡を抽出することが可能となり、軌跡を利用した分析で有用な結果を得ることができる。
【図面の簡単な説明】
【0011】
【図1】従来技術による軌跡の例である。
【図2】本発明の一実施の形態における判定装置の構成図である。
【図3】本発明の一実施の形態における入力データの例である。
【図4】本発明の一実施の形態における判定装置の全体動作のフローチャートである。
【図5】本発明の一実施の形態における信頼性判定処理フローチャートである。
【発明を実施するための形態】
【0012】
以下図面と共に、本発明の実施の形態を説明する。
【0013】
図2は、本発明の一実施の形態における判定装置の構成を示す。
【0014】
判定装置は、位置入力部1、信頼性判定処理部2、所要時間計算部3、判定結果出力部4、計算結果記憶部5から構成される。
【0015】
以下に、上記の各構成要素の処理を説明する。
【0016】
まず、位置入力部1では、外部より得られた位置情報を入力として受け取り、それを信頼性判定処理部2に渡す。位置情報は、例えば端末自身がGPS等を用いて測位してもよいし、携帯電波の基地局の位置情報を用いて測位した結果を携帯電話の事業者等から伝える形式でも構わない。受け取った位置情報は、2次元の位置(以下では緯度,経度とする)および観測された時刻の三つ組の系列である。位置情報の例を図3に示す。以下、位置情報をZ=(z1,z2,…,zN)とする。ziは二次元の実数ベクトルzi=(xi,yi)とする。また、t1,t2,…,tNをそれぞれz1,z2,…,zNが観測された時刻を表すものとする。ここで、1≦i<j≦Nのときに、常にti<tjが成り立つものとする。
【0017】
次に、信頼性判定処理部2では、位置情報入力部1から位置情報を受取り、後述する図5のフローに示す信頼性判定処理を実行し、位置情報入力部1から入力された位置情報の系列が、信頼できる軌跡であるかどうかを出力する。その途中の処理として、所要時間計算部3に位置データのペアを渡し、計算結果を計算結果記憶部5から受け取る。
【0018】
所要時間計算部3では、信頼性判定処理部2より任意の2次元座標の組を入力として受け取り、その2点間を移動するのに必要な所要時間を計算し、計算結果記憶部5に出力する。以下では、T(z,z')を点zからz'へ移動する際に必要な時間を表すものとする。2点間の移動に必要な所要時間の計算方法は幾通りか考えられる。例えば、zとz'との距離を利用して、
【0019】
【数1】
として定義してもよい。ここでθはパラメータであり、また、
【0020】
【数2】
とする。また、カーナビゲーションシステムで用いられる経路検索システムを用いてzとz'の所要時間を計算して出力するものとしてT(z,z')を定義してもよい。また、鉄道の乗り換え案内システムを用いてT(z,z')を定義してもよい。なお、その場合は、zとz'の座標より、最寄りの駅を求めて、それらの間の所要時間を計算することになる。
【0021】
計算結果記憶部5では、所要時間計算部3において計算された、2点間の移動にかかる時間(非負の実数)が記憶される。計算結果記憶部5にはN-1個の非負の実数を記憶する領域を準備する。計算結果記憶部5に格納された値は、信頼性判定処理部2から参照される。
【0022】
判定結果出力部4では、信頼性判定処理部2より渡された判定結果を出力する。
【0023】
上記の一連の動作を図4のフローチャートを用いて説明する。
【0024】
ステップ1)位置入力部1より位置データが入力される。
【0025】
ステップ2)次に、信頼性判定処理部2において信頼性判定処理を実行する。信頼性判定処理は、2点間の距離に応じて、時間差を算出する(歩行、電車などを想定して速度を決定することにより距離から時間差を求めることができる)。この時間差が実際の時間差と略同じであれば、正しい軌跡と見做し、そうでない場合は、寄り道などが考えられるため、対象とする実際の軌跡ではないと判断する。
【0026】
以下、信頼性判定処理について、当該ステップ2の処理を図5に示すフローチャートを用いて説明する。
【0027】
ステップ21)入力された位置データから復元される軌跡の信頼性スコアを計算する。スコアの計算式を示す前に、軌跡Zに対する信頼性スコアR(Z)を、T(z,z')を用いて、信頼性スコアR(Z)を、
【0028】
【数3】
として定義する。ここで、S(t,t')は、2つの実数値を受け取り、それらが一致している度合いを返す関数である。S(t,t')の値が大きいほど、tとt'とが近い値をとるものとする。
【0029】
S(t,t')にはいくつかの実装が考えられるが、例えば、
【0030】
【数4】
とすれば条件を満たす。ここでσはパラメータであり、事前に設定するものとする。
【0031】
ステップ22)上記で計算したR(Z)が事前に設定したしきい値よりも大きいかどうかを判定する。しきい値よりもスコアが大きいならば、ステップ23に移行し、しきい値よりもスコアが小さいならば、ステップ24に移行する。
【0032】
ステップ23) 信頼できる軌跡と判定し、処理を終了する。
【0033】
ステップ24) 信頼できない軌跡と判定し、処理を終了する。
【0034】
ステップ3)信頼性判定処理部3の信頼性判定処理終了後、判定結果を判定結果出力部4より出力し、処理を終了する。
【0035】
上記のように、本発明では、任意の2点の位置間を移動する際にかかる時間を条件として、復元された軌跡の信頼性を判定する。もし、2点間の移動に想定された時間がかかっていたならば、実際の軌跡は2点間を結んだ軌跡と一致する可能性が高い。一方、想定されたよりも時間がかかっていたならば、対象は2点間を結ぶ軌跡と異なる軌跡をとっていた可能性が高いため、復元された軌跡の信頼性は下がる。この手法を用いることによって、位置計測の頻度が低い場合であっても、信頼性の高い軌跡を判別することが可能となる。
【0036】
また、本発明は、上記の図2に示す判定装置の各構成要素の動作をプログラムとして構築し、判定装置として利用されるコンピュータにインストールして実行させる、または、ネットワークを介して流通させることが可能である。
【0037】
なお、本発明は、上記の実施の形態に限定されることなく、特許請求の範囲内において、種々変更・応用が可能である。
【符号の説明】
【0038】
1 位置入力部
2 信頼性判定処理部
3 所要時間計算部
4 判定結果出力部
5 計算結果記憶部
【特許請求の範囲】
【請求項1】
断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定装置であって、
前記位置データを取得する位置入力手段と、
前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算手段と、
前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出手段と、
前記スコア算出手段で求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定手段と、
を有することを特徴とする軌跡の信頼性判定装置。
【請求項2】
前記スコア算出手段で用いる前記関数S(t,t')は、
該関数S(t,t')の値が大きいほど、2つの実数値tとt'とが近い値をとる
請求項1記載の軌跡の信頼性判定装置。
【請求項3】
断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定方法であって、
位置入力手段が、前記位置データを取得する位置入力ステップと、
所要時間計算手段が、前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算ステップと、
スコア算出手段が、前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出ステップと、
信頼性判定手段が、前記スコア算出ステップで求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定ステップと、
を行うことを特徴とする軌跡の信頼性判定方法。
【請求項4】
前記スコア算出ステップで用いる前記関数S(t,t')は、
該関数S(t,t')の値が大きいほど、2つの実数値tとt'とが近い値をとる
請求項3記載の軌跡の信頼性判定装置。
【請求項5】
コンピュータを、
請求項1または2に記載の軌跡の信頼性判定装置の各手段として機能させるための軌跡の信頼性判定プログラム。
【請求項1】
断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定装置であって、
前記位置データを取得する位置入力手段と、
前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算手段と、
前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出手段と、
前記スコア算出手段で求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定手段と、
を有することを特徴とする軌跡の信頼性判定装置。
【請求項2】
前記スコア算出手段で用いる前記関数S(t,t')は、
該関数S(t,t')の値が大きいほど、2つの実数値tとt'とが近い値をとる
請求項1記載の軌跡の信頼性判定装置。
【請求項3】
断続的に取得される位置データから復元される軌跡の信頼性を判定する軌跡の信頼性判定方法であって、
位置入力手段が、前記位置データを取得する位置入力ステップと、
所要時間計算手段が、前記位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納する所要時間計算ステップと、
スコア算出手段が、前記所要時間記憶手段から前記移動に要する時間を取得し、入力された関数を用いて、前記位置データから復元される軌跡の信頼性スコアを算出するスコア算出ステップと、
信頼性判定手段が、前記スコア算出ステップで求められた前記信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定する信頼性判定ステップと、
を行うことを特徴とする軌跡の信頼性判定方法。
【請求項4】
前記スコア算出ステップで用いる前記関数S(t,t')は、
該関数S(t,t')の値が大きいほど、2つの実数値tとt'とが近い値をとる
請求項3記載の軌跡の信頼性判定装置。
【請求項5】
コンピュータを、
請求項1または2に記載の軌跡の信頼性判定装置の各手段として機能させるための軌跡の信頼性判定プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−68566(P2013−68566A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208792(P2011−208792)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]