
軌道ベースのロケーション決定
ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。
【発明の詳細な説明】
【米国特許法第119条の下での優先権の主張】
【0001】
本出願は、「軌道ベースのロケーション決定」と題し、2009年6月30日に出願された仮出願番号第61/221,981号に対する優先権を主張し、この出願は、一般的に本発明の譲受人によって所有され、ここに参照により組み込まれている。
【背景】
【0002】
分野:
ここで開示した主題事項は、動きの推定した軌道を使用して、移動体デバイスのロケーションを推定することに関する。
【0003】
情報:
グローバルポジショニングシステム(GPS)のような衛星ポジショニングシステム(SPS)は、典型的に、セルラ電話機や、パーソナル通信システム(PCS)デバイスや、他の移動体デバイスのようなワイヤレスデバイスが、地球軌道衛星ビークル(SV)から受信した信号に少なくとも部分的に基づいて地球上でのこれらのロケーションを決定することを可能にするSVのシステムを具備している。このようなワイヤレスデバイスには、SPS受信機が備えられていることがあり、SV信号を処理してロケーションを決定することができる。しかしながら、このようなワイヤレスデバイスは、ワイヤレスデバイスがSPS信号を捕捉することを許容しないビルディング内のような、無線周波数(RF)環境中に位置付けられていることがある。さらには、このようなRF環境は、例えば、ワイヤレスデバイスと、セルラタワーおよび/またはワイヤレス送信機のような、RF環境の外のエンティティとの間の通信を妨げることがある。したがって、ワイヤレスデバイスが位置付けられる場所によっては、ワイヤレスデバイスは、SPS信号の受信または他のワイヤレス通信に基づいて、そのロケーションを決定する能力が欠如することがある。
【図面の簡単な説明】
【0004】
以下の図面を参照して、限定されていない、および、網羅されていない特徴を記述する。ここで、同一の参照番号は、さまざまな図面全体を通して、同一の部分を参照する。
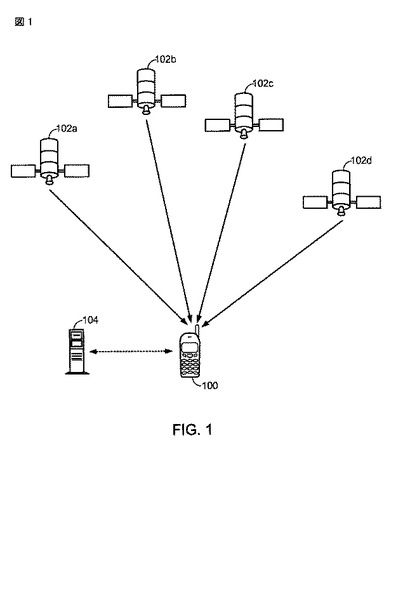
【図1】図1は、インプリメンテーションにしたがった、衛星ポジショニングシステム(SPS)の概略図である。
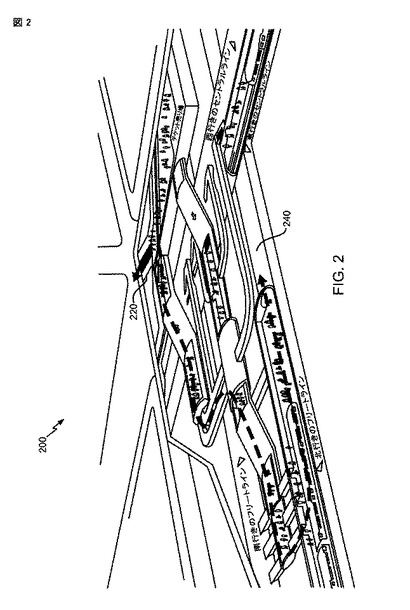
【図2】図2は、インプリメンテーションにしたがった、移動体デバイスの可能性ある軌道を示している斜視図である。
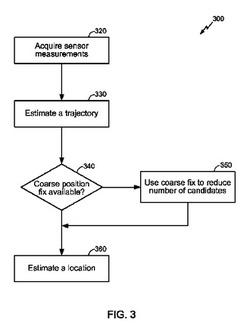
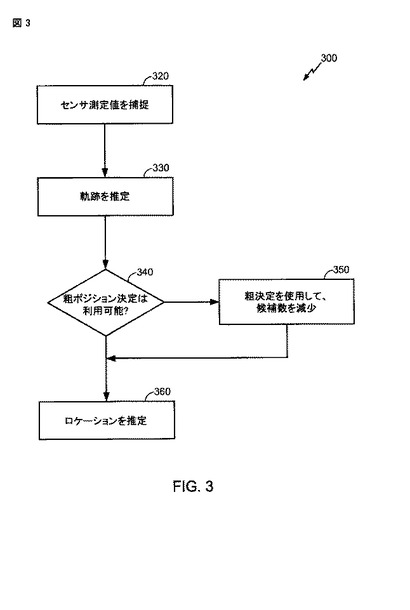
【図3】図3は、インプリメンテーションにしたがった、移動体デバイスのロケーションを推定するプロセスのフロー図である。
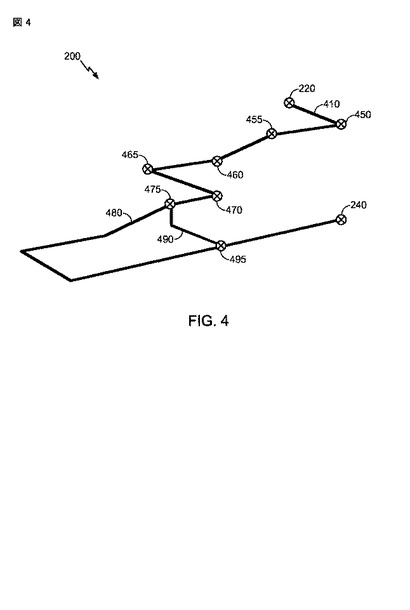
【図4】図4は、インプリメンテーションにしたがった、移動体デバイスの可能性ある軌道を示している概略図である。
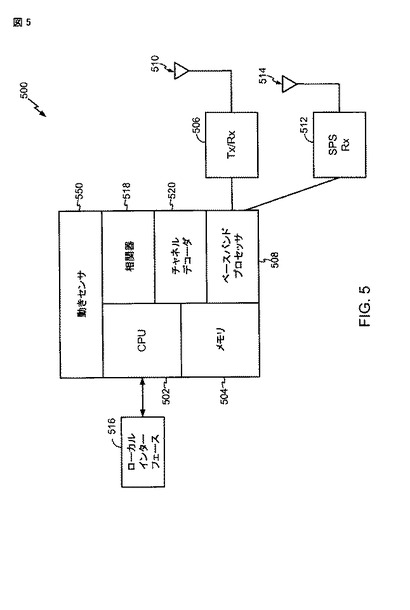
【図5】図5は、インプリメンテーションにしたがった、その動きを感知して、ワイヤレスネットワークと通信することができる移動体デバイスの概略図である。
【概要】
【0005】
インプリメンテーションでは、プロセスは、移動体デバイスにおける少なくとも1つのセンサによって実行される3次元のセンサ測定に少なくとも部分的に基づいて、移動体デバイスの動きの3次元の軌道を推定することと;推定された3次元の軌道と1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、移動体デバイスのロケーションを推定することとを含んでいてもよい。しかしながら、これは、全体を通して開示および説明した方法の特定の例に過ぎないことと、主張する主題事項は、この特定の例に限定されるものではないこととを理解すべきである。
【詳細な説明】
【0006】
この明細書全体を通して、「1つの例」、「1つの特徴」、「例」、または「ある特徴」に対してなされる参照は、特徴および/または例に関連して記述する、特定の特徴、構成、または特性は、主張する主題事項のうちの少なくとも1つの特徴および/または例に含まれることを意味する。したがって、この明細書全体を通した、さまざまな場所におけるフレーズ「1つの例において」、「例」、「1つの特徴において」、または「特徴」の登場は、必ずしも、すべてが同じ特徴および/または例に言及しているわけではない。さらに、特定の、特徴、構成、または特性を、1つ以上の例および/または特徴に組み合わせてもよい。
【0007】
衛星ポジショニングシステム(SPS)は、送信機から受信した信号に少なくとも部分的に基づいて、エンティティが地球上でのそれらのロケーションを決定できるように配置されている送信機のシステムを備えていてもよい。このような送信機は、一般的に、1組の数のチップの反復擬似ランダムノイズ(PN)コードでマークされた信号を送信してもよく、また、地上ベースの制御局、ユーザ機器、および/または宇宙ビークル上に位置付けられていてもよい。特定の例では、このような送信機は、地球軌道衛星上に位置付けられていてもよい。例えば、グローバルポジショニングシステム(GPS)、Galileo、GLONASS、またはCompassのような、グローバルナビゲーション衛星システム(GNSS)の配列中の衛星は、PNコードでマークされた信号を送信してもよく、このPNコードは、配列中の他の衛星によって送信されるPNコードと区別可能である。
【0008】
受信機においてポジションを推定するために、ナビゲーションシステムは、衛星から受信した信号におけるPNコードの検出に少なくとも部分的に基づいた、よく知られている技術を使用して、受信機の「見えるところ」にある衛星に対する擬似距離測定値を決定してもよい。受信機において受信信号を捕捉するプロセスの間に、衛星に関係するPNコードでマークされている受信信号中で検出されたコード位相に少なくとも部分的に基づいて、衛星に対するこのような擬似距離を決定してもよい。受信信号を捕捉するために、このような受信機は、受信信号を、衛星に関係する局所的に生成されたPNコードと相関させてもよい。例えば、このような受信機は、このような受信信号を、複数のコード、および/または、このような局所的に生成されたPNコードの時間シフトされたバージョンと相関させてもよい。先に説明したように、最高信号電力を有する相関結果をもたらす、特定の時間および/またはコードシフトされたバージョンの検出は、擬似距離を測定する際に使用するために捕捉された信号に関係するコード位相を示す。
【0009】
インプリメンテーションでは、例えば、移動体デバイス(MD)が、そうでない場合にはロケーション決定を可能にするだろうSPS送信機からの信号のような信号を捕捉するのを妨げる好ましくないRF環境を有する領域中に、MDが位置付けられることがある。さらには、このようなRF環境は、MDが、RF環境の外部から何らかのワイヤレス通信を通してロケーション情報を受信することを妨げることがある。このような領域は、2、3個例を挙げると、オフィスビルディングの内部、ショッピングモール、および/または地下鉄を含んでいるかもしれない。MDは、このような領域中で移動すると、MDは、動きの2次元または3次元の軌道を規定し、MDにおいて測られたセンサ測定値に少なくとも部分的に基づいて、この動きの2次元または3次元の軌道を推定してもよい。このような軌道は、例えば、2または3次元パターン、またはワイヤーフレーム表現を含んでいてもよく、これらは、MDによって取られる1つの可能性あるルートを表してもよい。例えば、人によって運ばれるMDは、ビルディングに入り、左から右にラップアラウンドしている一続きの階段を下に移動して、左方向に進み、エスカレータを下に進んで、例えば、地下鉄のようなものの中に進むかもしれない。上述したルートは、いくつかの可能性あるルート、または、特定の領域に対する候補の軌道のうちの1つを含んでいるかもしれない。上述したルートはまた、一意的な軌道パターンを規定してもよい。特定のインプリメンテーションでは、(例えば、センサ測定値からの)その推定された軌道パターンと、1つ以上の予め定められた候補の軌道パターンとの比較に少なくとも部分的に基づいて、MDのロケーションを推定してもよい。したがって、例えば、SPS送信機信号を移動体デバイスが捕捉することを妨げる好ましくないRF環境を有する領域中で、MDのロケーションを推定してもよい。
【0010】
インプリメンテーションでは、外部からソース供給された(ES)ポジション情報が、ユーザによってMDに提供されてもよく、および/または、MDにおけるSPS信号の捕捉に少なくとも部分的に基づいて決定されてもよい。ESポジション情報は、また、2、3個例を挙げると、WiFi(登録商標)信号または他のローカルエリアネットワーク(LAN)信号、ブルートゥース(登録商標)、または他のパーソナルエリアネットワーク(PAN)信号、ウルトラワイドバンド(UWB)、ワイドエリアネットワーク(WAN)、デジタルTV、ワイヤレス中継器、RFID、無線ロケーションビーコン、および/またはセルタワーIDのような、SPS以外のポジショニング技術からの信号を含んでいてもよい。例えば、このような捕捉は、移動体デバイスがこのようなES情報を捕捉するのを妨げる領域にMDが入る前に行われるかもしれない。特定のインプリメンテーションでは、動きのMD軌道と比較する候補の軌道の数を減少させるために、ESポジション情報を使用してもよい。セルIDのようないくつかのESポジション情報は、例えば、SPS信号のような他のESポジション情報よりも、正確さが低いかもしれない。正確さが低いESポジション情報は、ビルディング、都市ブロック、州等のような、比較的に大きいエリア内までしかMDのロケーションを正確に測位しないかもしれない。例えば、ESポジション情報は、サンノゼの都市中にMDが位置付けられていること、または、サンフランシスコの金融街にある地下鉄の駅中に、または、サンフランシスコの金融街の地下鉄の駅の近くにMDが位置付けられていることを確証することができる。後のケースでは、候補の軌道を、サンフランシスコの地下鉄の駅への、特定の候補の軌道に減少させることができる。
【0011】
図1は、インプリメンテーションにしたがった、SPSシステムの応用を図示している。ワイヤレス通信システム中の移動体デバイス(MD)100は、MD100に対する見通し線中の衛星102a、102b、102c、および102dからの送信を受信し、送信のうちの4つ以上のものから時間測定値を導出してもよい。MD100は、例えば、ポジション決定エンティティ(PDE)のようなロケーションサーバ104に、このような測定値を提供してもよい。ロケーションサーバ104は、このような測定値からMD100のロケーションを推定してもよい。代替的に、MD100は、例えば、SPS信号を利用することによって、それ自体のロケーションを推定してもよい。当然、SPSシステムのこのような応用は、単なる例であり、主張する主題事項は、これに限定されるものではない。さらにまた、SPS以外のポジショニング技術の信号を使用して、MDポジションを計算してもよい。例えば、他のこのようなポジション技術を利用することによって、MD100は、それ自体のロケーションを推定してもよいし、または、上述したように、ロケーションサーバを用いてもよい。
【0012】
図2は、インプリメンテーションにしたがった、MDのいくつかの可能性ある軌道を含む領域200を示している斜視図である。先に述べたように、このような領域は、SPS信号のような信号を捕捉するのに、MDにとって好ましくないRF環境を含んでいることがある。このような領域は、例えば、地下鉄を含むかもしれない。領域200は、例えば、1つ以上の通路、廊下、階段、エスカレータ、エレベータ、および/または地下鉄の列車を含んでいてもよい。MDを運んでいる人は、例えば、エントランス220において領域200に入り、その後、目的地240に対する1つ以上の可能性あるルートの選択に至るかもしれない。1つ以上の可能性の中の2つのルート、軌道480および490を図4中で示しており、以下で説明する。
【0013】
図3は、インプリメンテーションにしたがった、MDのロケーションを推定するプロセス300のフロー図であり、図4は、インプリメンテーションにしたがった、MDの軌道を示している概略図である。図1中で示されているMD100のようなMDは、例えば、プロセス300のブロック320におけるように、センサ測定値を取得するための、動きセンサ550(図5)を備えていてもよい。このような動きセンサは、例えば、多軸の加速度計、多軸の地磁気センサ(コンパス)および/または多軸のジャイロを含んでいてもよい。動きセンサはまた、気圧の圧力センサを含んでいてもよい。特定の例では、加速度計や、コンパスや、ジャイロは、3−軸センサを含んでいてもよい。ブロック330におけるように、MD100の動きの、現在および/または過去の軌道を推定するために、センサ測定値を使用してもよい。例えば、図4を参照すると、MD100は、エントランス220において領域200に入り、3次元の軌道を開始するかもしれない。この3次元の軌道は、ルート410に沿って、時々および/または周期的に、継続的に動きを測定することによって追跡され得る。このようなルート410は、例えば、左折450が続く移動と、階段の一番上での方向の変更455とが続き、そして、階段の一番下での方向の別の変更460と、左折465と、右折470とが続き、そして、方向分離475となる移動を含んでいてもよく、この分離は、例えば、エスカレータおよびエレベータを含んでいてもよい。特定のインプリメンテーションでは、軌道を決定するために、MD100の動きの、スピード、方向、および/またはタイムスパンを、MD100において測定および/または記憶してもよい。したがって、推定された軌道を提供するために、ルート410に沿った、測定した移動および/または方向の変更を使用してもよい。別の特定のインプリメンテーションでは、MD100は、ルート410に沿って位置付けられている1つ以上の固定されたビーコンから情報を取得するように適合させてもよい。このようなビーコンは、無線周波数識別(RFID)トランスポンダのようなニアフィールド通信(NFC)システムとともに、WiFi信号、ブルートゥース信号、UWB信号、WAN信号、デジタルTV信号、セルタワーID、および/または、例えば、ルート410に沿ったポジション決定をMDに提供し得る任意のデバイスのうちの少なくとも一部を含んでいてもよい。例えば、このようなビーコンから取得した情報は、動きセンサ測定値とともに、例えば、MD100の推定された軌道を提供するために使用し得る、1つ以上のポジション決定を提供してもよい。当然、軌道は、多数の方法によって推定してもよく、主張する主題事項は、ここで記述した例に限定されるものではない。
【0014】
インプリメンテーションでは、データベースは、1つ以上の領域に対する予め定められた候補の軌道を含んでいてもよい。言い換えると、データベースは、特定の領域中のユーザにとって利用可能な、可能性あるルートまたはパスに関する情報を含んでいてもよい。例えば、このようなデータベースは、ビルディング、地下鉄システム、都市、州、および/または国に対する予め定められた候補の軌道を含んでいてもよい。図4を再び参照すると、ロケーション475は、1つは軌道480に通じ、もう1つは軌道490に通じる2つのルート選択を、MD100を運んでいるユーザに対して提示してもよい。いかなるケースにおいても、動きセンサが取り付けられているMD100は、取られるいずれかのルートの軌道を推定するために、測定値を提供するかもしれない。したがって、データベースは、例えば、領域200の予め定められた候補の軌道として、このような軌道に関する情報を含んでいてもよい。このような情報は、地理的な情報、指向性情報および/または移動情報を含んでいてもよい。例えば、ルートの一部のような、階段の吹き抜けに関する地理的な情報、指向性情報および/または移動情報をデータベース中に記憶させてもよい。別の例では、都市を含む領域は、それぞれのビルディングが、比較的に多数の可能性あるルートを提供する廊下、階段、および/またはエレベータを有している、複数のビルディングを含んでいるかもしれない。このような非常に多くの可能性あるルートが存在することがあるかもしれないが、データベース中の候補の軌道は、一意的な軌道パターンを含んでいるかもしれず、このような一意性は、以下で説明するように、比較的に小さい領域に限定されるかもしれない。例えば、軌道480は、ロケーション475からロケーション495への移動および/または方向変更の一意的なパターンに対応しているかもしれない。軌道480のパターンに一致するルート410の他の部分がないので、このような軌道パターンは、図2の領域200中で示されているように一意的であるかもしれない。さらには、軌道480のパターンは、例えば、都市領域内の数ある領域パターンの中で一意的であるかもしれない。言い換えると、都市におけるビルディング中で取られ得る複数の可能性あるルートの中で、軌道480は一意的なパターンを含んでいるかもしれない。したがって、軌道480のパターンは、軌道480のロケーションを一意的に識別してもよく、これに対して、データベースが、例えば、ロケーション情報を含んでいてもよい。予想されるように、このような一意性は、州または国のような比較的に大きい領域に対する候補の軌道を含むデータベースには同様に適応されないかもしれない。このような大きい領域は、比較的に非常に多くの可能性あるルートと、関係する軌道パターンとを含んでいるかもしれない。このようなケースでは、2つの異なるロケーションが、軌道パターンに偶然に一致することを含む可能性は比較的に高いかもしれない。少なくともこの理由のために、以下で説明するような、データベース中の候補の軌道の数を減少させるためのESポジション情報が、望まれるかもしれない。
【0015】
上述したように、データベースは、複数のビルディングを含む都市のような領域に対する予め定められた候補の軌道を含んでいてもよく、ここで、それぞれのビルディングは、廊下、階段、および/またはエレベータを含んでいるかもしれない。さらには、このようなデータベースは、州および/または国のような、都市を越えてさらに遠くまで及ぶ領域の場合でも、予め定められた候補の軌道を含んでいてもよい。したがって、このようなデータベースは、比較的に大量のデータを含んでいるかもしれない。プロセス300のブロック340および350におけるように、インプリメンテーションにおいて、MD100に対して利用可能である場合に、ESポジション情報を使用して、候補の軌道の数を修正および/または減少させてもよい。例えば、ESポジション情報を取得することは、特定の都市内のMD100のロケーションを決定して、州全体から都市全体に、候補の軌道の数を狭めることを含んでいてもよい。別の例では、ESポジション情報を取得することは、特定の地下鉄に近い領域内のMD100のロケーションを決定し、都市全体から特定の地下鉄に関係するそれらの候補の軌道に、予め定められた候補の軌道の数を減らすことを含んでいてもよい。1つのインプリメンテーションでは、MD100が、SPS信号のような信号を捕捉するのに好ましいRF環境中にある間に、MD100によってESポジション情報を取得してもよい。このようなESポジション情報は、例えば、地下鉄領域におけるような好ましくないRF環境にMD100が入る前に決定してもよい。特定のインプリメンテーションでは、ESポジション情報によってMD100が位置していると決定されたロケーションにおける、または、ESポジション情報によってMD100が位置していると決定されたロケーションの近くの、領域に対する予め定められた候補の軌道のデータベースの少なくとも一部をMD100がダウンロードしてもよい。この方法では、MD100は、おそらく、記憶能力が限定されており、MD100のおおよそのロケーションに関するデータベースの一部分だけを記憶する必要がある。別の特定のインプリメンテーションでは、ESポジション情報によってMD100が位置していると決定されたロケーションにおける、または、ESポジション情報によってMD100が位置していると決定されたロケーションの近くの、領域に対する候補の軌道の予め記憶されているデータベースを、MD100が備えていてもよい。さらに別の特定のインプリメンテーションでは、MD100のロケーション決定を可能にし得る、SPS送信機のようなものからの信号の利用可能性に少なくとも部分的に依存して、ESポジション情報を捕捉する必要はない。このようなケースでは、MD100が現在動作しているかもしれないロケーションを含む可能性が比較的に高い予め定められた候補の軌道のデータベースの少なくとも一部を記憶するためのメモリを、MD100は備えていてもよい。例えば、このような記憶されているデータベースは、MD100にとって利用可能であった最後のSPS信号から前もって確立してもよい。さらに別の特定のインプリメンテーションでは、ユーザが、ESポジション情報のようなロケーション情報をMD100中に入力してもよい。例えば、MD100に対してSPS信号が利用可能でない場合に、アドレスのようなユーザ入力が入れられてもよい。さらなる別の例では、デジタルマップおよび/またはESポジション情報の利用可能性を持つMD100によって、可能性ある軌道を計算してもよい。当然、データベースを修正するための、このようなESポジション情報は、単なる例であり、主張する主題事項は、これに限定されるものではない。
【0016】
特定のインプリメンテーションでは、上記で説明したように、ブロック360において、動きセンサ550によって測定されたような推定された軌道と、例えば、データベース中に記憶されている1つ以上の予め定められた候補の軌道との比較に少なくとも部分的に基づいて、MD100のロケーションを決定してもよい。このような比較は、データベース中の候補の軌道の中の2次元または3次元の軌道の空間パターンおよび/または形状を、MD100に対して推定された軌道と解析的にマッチングすることを含んでいてもよい。特定のインプリメンテーションでは、空間パターンのマッチングは、例えば、データベース中で維持されている1つ以上の予め定められた候補の軌道との、MD100に対して推定された軌道の最小二乗適合解析を含んでいてもよい。当然、軌道を解析的に比較する他の方法は、最小二乗適合解析に限定されるものではなく、主張する主題事項は、これに限定されるものではない。1つのインプリメンテーションでは、いったん、MD100の推定された軌道のものと、候補の軌道のものとの間で、このようなパターンのマッチングが見出されると、MD100のロケーションを決定することができる。ここで、候補の軌道は、データベース中で維持されているロケーション情報を含んでいてもよい。
【0017】
図5は、1つのインプリメンテーションにしたがった、ワイヤレスネットワークと通信して、その動きを感知することができるデバイスの概略図である。特定のインプリメンテーションでは、図1中で示されているMS100のようなMSは、デバイス500を備えていてもよく、このデバイス500は、擬似距離測定値を決定するために、アンテナ514において受信されたSPS信号を処理し、アンテナ510を通してワイヤレス通信ネットワークと通信することができる。ここで、無線トランシーバ506は、データ、音声および/またはSMSメッセージのようなベースバンド情報により、RF搬送波信号を変調して、RF搬送波上に変調し、変調したRF搬送波を復調して、このようなベースバンド情報を取得するように適合させてもよい。アンテナ510は、ワイヤレス通信リンクを通して、変調されたRF搬送波を送信して、ワイヤレス通信リンクを通して、変調されたRF搬送波を受信するように適合させてもよい。
【0018】
ベースバンドプロセッサ508は、ワイヤレス通信リンクを通しての送信のために、中央処理ユニット(CPU)502からトランシーバ506にベースバンド情報を提供するように適合させてもよい。ここで、CPU502は、他のネットワーク(例えば、ジグビー(登録商標)、ブルートゥース、WiFi、ピアツーピア)に近いローカルインターフェース516から、このようなベースバンド情報を取得してもよく、このようなベースバンド情報は、例えば、環境知覚データ、動きセンサデータ、高度データ、(例えば、加速度計からの)加速情報を含んでいてもよい。このようなベースバンド情報はまた、ポジション情報を含んでいてもよく、例えば、このポジション情報は、デバイス500のロケーションの推定値、ならびに/あるいは、例えば、擬似距離測定値および/またはESポジション情報のような、同じものを計算する際に使用し得る情報のようなものがある。先に述べたように、このようなESポジション情報はまた、ユーザ入力から受け取ってもよい。CPU502は、測定された動きデータに少なくとも部分的に基づいて、デバイス500の軌道を推定するように適合させてもよい。CPU502はまた、候補の軌道を計算することができてもよい。チャネルデコーダ520は、ベースバンドプロセッサ508から受け取ったチャネルシンボルをデコードして、基礎となるソースビットにするように適合させてもよい。
【0019】
SPS受信機(SPSRx)512は、SVからの送信を受信して処理し、処理した情報を相関器518に提供するように適合させてもよい。相関器518は、受信機512によって提供された情報から相関関数を導出するように適合させてもよい。相関器518はまた、トランシーバ506によって提供されたパイロット信号に関連する情報から、パイロットに関連する相関関数を導出するように適合させてもよい。この情報は、ワイヤレス通信ネットワークを捕捉するためのデバイスによって使用してもよい。
【0020】
メモリ504は、機械読み取り可能な命令を記憶するように適合させてもよく、機械読み取り可能な命令は、プロセス、例、インプリメンテーション、または記述または示唆しているこれらの例のうちの1つ以上のものを実行するように実行可能である。CPU502は、このような機械読み取り可能な命令にアクセスするように、および、このような機械読み取り可能な命令を実行するように適合させてもよい。しかしながら、特定の態様では、これらは、CPUによって実行し得るタスクの単なる例であり、主張する主題事項は、これらの点に限定されるものではない。さらに、メモリ504は、1つ以上の予め定められた候補の軌道を記憶するように適合させてもよく、ここでは、CPU502は、推定した軌道と1つ以上の予め定められた候補の軌道との比較に少なくとも部分的に基づいて、デバイス500のロケーションを決定するように適合させてもよい。特定のインプリメンテーションでは、CPU502は、ESポジション情報に少なくとも部分的に基づいて、1つ以上の予め定められた候補の軌道の数を減少させるように適合させてもよい。
【0021】
インプリメンテーションでは、動きセンサ550は、デバイス500の動きを測定するための1つ以上のトランデューサを備えていてもよい。このようなトランデューサは、例えば、加速度計、コンパス、圧力センサ、および/またはジャイロを備えていてもよい。デバイス500のこのような動きは、回転および/または移行を含んでいてもよい。先に説明したように、例えば、デバイス500の軌道を決定する際に使用するために、記憶した測定値を導出できるように、1つ以上のこのような動きの測定値をメモリ504中に記憶させてもよい。
【0022】
ここで記述した方法論は、特定の特徴および/または例にしたがった応用に依存したさまざまな手段によって実現してもよい。例えば、このような方法論は、ハードウェア、ファームウェア、ソフトウェア、および/またはこれらのものを組み合わせたもので実現してもよい。ハードウェアインプリメンテーションでは、処理ユニットは、例えば、1つ以上の特定用途向け集積回路(ASIC)、デジタルシグナルプロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブルロジックデバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、電子デバイス、ここで記述した機能を実行するように設計されている他のデバイスユニット、および/または、これらを組み合わせたもの内で実現してもよい。
【0023】
ファームウェアおよび/またはソフトウェアインプリメンテーションでは、方法論は、ここで記述した機能を実行するモジュール(例えば、手順、機能等)で実現してもよい。ここで記述した方法論を実現する際に、命令を有機的に具現化する任意の機械読み取り可能媒体を使用してもよい。例えば、ソフトウェアコードは、メモリ中に、例えば、移動局のメモリ中に記憶させ、プロセッサによって実行してもよい。メモリは、プロセッサ内で、または、プロセッサの外部で実現してもよい。ここで使用した「メモリ」という用語は、任意のタイプの、長期メモリ、短期メモリ、揮発メモリ、不揮発メモリ、または他のメモリを意味し、メモリの何からの特定のタイプまたはメモリの数、あるいはメモリが記憶されるメディアのタイプに限定されるものではない。
【0024】
ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに対して、ここで記述した、ポジション決定および/または推定技術を使用してもよい。「ネットワーク」および「システム」という用語は、ここで互換性があるように使用してもよい。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク等であってもよい。CDMAネットワークは、無線技術の例をいくつか挙げると、cdma2000、ワイドバンド−CDMA(W−CDMA)のような1つ以上の無線アクセス技術(RAT)を実現してもよい。ここで、cdma2000は、IS−95、IS−2000、およびIS−856標準規格にしたがって実現される技術を含んでいてもよい。TDMAネットワークは、グローバルシステムフォーモバイル通信(GSM)(登録商標)、デジタルアドバンスド移動体電話機システム(D−AMPS)、または他の何らかのRATを実現してもよい。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)と名付けられているコンソーシアムによる文書中に記述されている。Cdma2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)と名付けられているコンソーシアムによる文書中に記述されている。3GPPおよび3PGG文書は、公的に入手可能である。WLANは、IEEE802.11xネットワークを含んでいてもよく、WPANは、例えば、ブルートゥースネットワーク、IEEE802.15xを含んでいてもよい。また、WWAN、WLAN、および/またはWPANのうちの任意のものを組み合わせたものに対して、ここで記述したこのようなポジション決定技術を使用してもよい。
【0025】
いくつかのSPSのうちの任意のもの、および/または、SPSを組み合わせたものとともに、ここで記述した技術を使用してもよい。さらには、擬似衛星を、または、衛星と擬似衛星とを組み合わせたものを利用するポジショニング決定システムとともに、このような技術を使用してもよい。擬似衛星は、時間と同期されることがあり、L帯域(または他の周波数)搬送波信号上で変調されるPNコードまたは(例えば、GPSまたはCDMAセルラ信号に類似した)他のレンジングコードをブロードキャストする地上ベースの送信機を備えていてもよい。遠隔受信機による識別を可能にするように、このような送信機に、一意的なPNコードが割り当てられることがある。トンネル、鉱山、ビルディング、都市の谷間、または他の閉じられたエリアにおけるような、軌道衛星からのGPS信号が入手不可能である状況では、擬似衛星は役立つかもしれない。擬似衛星の別のインプリメンテーションは、無線ビーコンとして知られている。ここで使用する用語「衛星」は、擬似衛星、擬似衛星の均等物、そして場合によっては他のものを含むことを意図している。ここで使用する用語「SPS信号」は、擬似衛星からのSPSと同様な信号、または、擬似衛星の均等物を含むことを意図している。
【0026】
ワイヤレス端末のようなエンティティは、データおよび他のリソースを要求するためにネットワークと通信してもよい。セルラ電話機、パーソナルデジタルアシスタント(PDA)、またはワイヤレスコンピュータを含む移動体デバイス(MD)は、このようなエンティティのほんの数例である。このようなエンティティの通信は、ネットワークデータにアクセスすることを含んでいてもよく、ネットワークデータにアクセスすることは、通信ネットワークのリソース、回路、または他のシステムハードウェアに重い負担をかけることがある。ワイヤレス通信ネットワークでは、ネットワーク中で動作しているエンティティ間で、データを要求および交換してもよい。例えば、MDは、ネットワーク内で動作しているMDのポジションを決定するためのデータを、ワイヤレス通信ネットワークから要求してもよい:ネットワークから受信したデータは、このようなポジション決定に対して、有益であるかもしれず、またはそうでなければ望ましいかもしれない。しかしながら、特定の態様では、これらは、MDとネットワークとの間のデータ交換の単なる例であり、主張する主題事項は、これらの点に限定されるものではない。
【0027】
例示的な特徴であると現在考えられるものを示し、説明したが、主張する主題事項から逸脱することなく、さまざまな他の改良が行われ、均等物が置換されてよいことが当業者によって理解されるだろう。さらに、ここで記述した中心の概念から逸脱することなく、主張する主題事項の教示に特定の状況を適応させるために、多くの改良が行われてもよい。したがって、主張する主題事項は開示されている特定の例に限られておらず、このような主張する主題事項は、また、添付した特許請求の範囲の範囲内に入るすべての態様と、これらの均等物とを含んでいてもよいことが意図されている。
【米国特許法第119条の下での優先権の主張】
【0001】
本出願は、「軌道ベースのロケーション決定」と題し、2009年6月30日に出願された仮出願番号第61/221,981号に対する優先権を主張し、この出願は、一般的に本発明の譲受人によって所有され、ここに参照により組み込まれている。
【背景】
【0002】
分野:
ここで開示した主題事項は、動きの推定した軌道を使用して、移動体デバイスのロケーションを推定することに関する。
【0003】
情報:
グローバルポジショニングシステム(GPS)のような衛星ポジショニングシステム(SPS)は、典型的に、セルラ電話機や、パーソナル通信システム(PCS)デバイスや、他の移動体デバイスのようなワイヤレスデバイスが、地球軌道衛星ビークル(SV)から受信した信号に少なくとも部分的に基づいて地球上でのこれらのロケーションを決定することを可能にするSVのシステムを具備している。このようなワイヤレスデバイスには、SPS受信機が備えられていることがあり、SV信号を処理してロケーションを決定することができる。しかしながら、このようなワイヤレスデバイスは、ワイヤレスデバイスがSPS信号を捕捉することを許容しないビルディング内のような、無線周波数(RF)環境中に位置付けられていることがある。さらには、このようなRF環境は、例えば、ワイヤレスデバイスと、セルラタワーおよび/またはワイヤレス送信機のような、RF環境の外のエンティティとの間の通信を妨げることがある。したがって、ワイヤレスデバイスが位置付けられる場所によっては、ワイヤレスデバイスは、SPS信号の受信または他のワイヤレス通信に基づいて、そのロケーションを決定する能力が欠如することがある。
【図面の簡単な説明】
【0004】
以下の図面を参照して、限定されていない、および、網羅されていない特徴を記述する。ここで、同一の参照番号は、さまざまな図面全体を通して、同一の部分を参照する。
【図1】図1は、インプリメンテーションにしたがった、衛星ポジショニングシステム(SPS)の概略図である。
【図2】図2は、インプリメンテーションにしたがった、移動体デバイスの可能性ある軌道を示している斜視図である。
【図3】図3は、インプリメンテーションにしたがった、移動体デバイスのロケーションを推定するプロセスのフロー図である。
【図4】図4は、インプリメンテーションにしたがった、移動体デバイスの可能性ある軌道を示している概略図である。
【図5】図5は、インプリメンテーションにしたがった、その動きを感知して、ワイヤレスネットワークと通信することができる移動体デバイスの概略図である。
【概要】
【0005】
インプリメンテーションでは、プロセスは、移動体デバイスにおける少なくとも1つのセンサによって実行される3次元のセンサ測定に少なくとも部分的に基づいて、移動体デバイスの動きの3次元の軌道を推定することと;推定された3次元の軌道と1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、移動体デバイスのロケーションを推定することとを含んでいてもよい。しかしながら、これは、全体を通して開示および説明した方法の特定の例に過ぎないことと、主張する主題事項は、この特定の例に限定されるものではないこととを理解すべきである。
【詳細な説明】
【0006】
この明細書全体を通して、「1つの例」、「1つの特徴」、「例」、または「ある特徴」に対してなされる参照は、特徴および/または例に関連して記述する、特定の特徴、構成、または特性は、主張する主題事項のうちの少なくとも1つの特徴および/または例に含まれることを意味する。したがって、この明細書全体を通した、さまざまな場所におけるフレーズ「1つの例において」、「例」、「1つの特徴において」、または「特徴」の登場は、必ずしも、すべてが同じ特徴および/または例に言及しているわけではない。さらに、特定の、特徴、構成、または特性を、1つ以上の例および/または特徴に組み合わせてもよい。
【0007】
衛星ポジショニングシステム(SPS)は、送信機から受信した信号に少なくとも部分的に基づいて、エンティティが地球上でのそれらのロケーションを決定できるように配置されている送信機のシステムを備えていてもよい。このような送信機は、一般的に、1組の数のチップの反復擬似ランダムノイズ(PN)コードでマークされた信号を送信してもよく、また、地上ベースの制御局、ユーザ機器、および/または宇宙ビークル上に位置付けられていてもよい。特定の例では、このような送信機は、地球軌道衛星上に位置付けられていてもよい。例えば、グローバルポジショニングシステム(GPS)、Galileo、GLONASS、またはCompassのような、グローバルナビゲーション衛星システム(GNSS)の配列中の衛星は、PNコードでマークされた信号を送信してもよく、このPNコードは、配列中の他の衛星によって送信されるPNコードと区別可能である。
【0008】
受信機においてポジションを推定するために、ナビゲーションシステムは、衛星から受信した信号におけるPNコードの検出に少なくとも部分的に基づいた、よく知られている技術を使用して、受信機の「見えるところ」にある衛星に対する擬似距離測定値を決定してもよい。受信機において受信信号を捕捉するプロセスの間に、衛星に関係するPNコードでマークされている受信信号中で検出されたコード位相に少なくとも部分的に基づいて、衛星に対するこのような擬似距離を決定してもよい。受信信号を捕捉するために、このような受信機は、受信信号を、衛星に関係する局所的に生成されたPNコードと相関させてもよい。例えば、このような受信機は、このような受信信号を、複数のコード、および/または、このような局所的に生成されたPNコードの時間シフトされたバージョンと相関させてもよい。先に説明したように、最高信号電力を有する相関結果をもたらす、特定の時間および/またはコードシフトされたバージョンの検出は、擬似距離を測定する際に使用するために捕捉された信号に関係するコード位相を示す。
【0009】
インプリメンテーションでは、例えば、移動体デバイス(MD)が、そうでない場合にはロケーション決定を可能にするだろうSPS送信機からの信号のような信号を捕捉するのを妨げる好ましくないRF環境を有する領域中に、MDが位置付けられることがある。さらには、このようなRF環境は、MDが、RF環境の外部から何らかのワイヤレス通信を通してロケーション情報を受信することを妨げることがある。このような領域は、2、3個例を挙げると、オフィスビルディングの内部、ショッピングモール、および/または地下鉄を含んでいるかもしれない。MDは、このような領域中で移動すると、MDは、動きの2次元または3次元の軌道を規定し、MDにおいて測られたセンサ測定値に少なくとも部分的に基づいて、この動きの2次元または3次元の軌道を推定してもよい。このような軌道は、例えば、2または3次元パターン、またはワイヤーフレーム表現を含んでいてもよく、これらは、MDによって取られる1つの可能性あるルートを表してもよい。例えば、人によって運ばれるMDは、ビルディングに入り、左から右にラップアラウンドしている一続きの階段を下に移動して、左方向に進み、エスカレータを下に進んで、例えば、地下鉄のようなものの中に進むかもしれない。上述したルートは、いくつかの可能性あるルート、または、特定の領域に対する候補の軌道のうちの1つを含んでいるかもしれない。上述したルートはまた、一意的な軌道パターンを規定してもよい。特定のインプリメンテーションでは、(例えば、センサ測定値からの)その推定された軌道パターンと、1つ以上の予め定められた候補の軌道パターンとの比較に少なくとも部分的に基づいて、MDのロケーションを推定してもよい。したがって、例えば、SPS送信機信号を移動体デバイスが捕捉することを妨げる好ましくないRF環境を有する領域中で、MDのロケーションを推定してもよい。
【0010】
インプリメンテーションでは、外部からソース供給された(ES)ポジション情報が、ユーザによってMDに提供されてもよく、および/または、MDにおけるSPS信号の捕捉に少なくとも部分的に基づいて決定されてもよい。ESポジション情報は、また、2、3個例を挙げると、WiFi(登録商標)信号または他のローカルエリアネットワーク(LAN)信号、ブルートゥース(登録商標)、または他のパーソナルエリアネットワーク(PAN)信号、ウルトラワイドバンド(UWB)、ワイドエリアネットワーク(WAN)、デジタルTV、ワイヤレス中継器、RFID、無線ロケーションビーコン、および/またはセルタワーIDのような、SPS以外のポジショニング技術からの信号を含んでいてもよい。例えば、このような捕捉は、移動体デバイスがこのようなES情報を捕捉するのを妨げる領域にMDが入る前に行われるかもしれない。特定のインプリメンテーションでは、動きのMD軌道と比較する候補の軌道の数を減少させるために、ESポジション情報を使用してもよい。セルIDのようないくつかのESポジション情報は、例えば、SPS信号のような他のESポジション情報よりも、正確さが低いかもしれない。正確さが低いESポジション情報は、ビルディング、都市ブロック、州等のような、比較的に大きいエリア内までしかMDのロケーションを正確に測位しないかもしれない。例えば、ESポジション情報は、サンノゼの都市中にMDが位置付けられていること、または、サンフランシスコの金融街にある地下鉄の駅中に、または、サンフランシスコの金融街の地下鉄の駅の近くにMDが位置付けられていることを確証することができる。後のケースでは、候補の軌道を、サンフランシスコの地下鉄の駅への、特定の候補の軌道に減少させることができる。
【0011】
図1は、インプリメンテーションにしたがった、SPSシステムの応用を図示している。ワイヤレス通信システム中の移動体デバイス(MD)100は、MD100に対する見通し線中の衛星102a、102b、102c、および102dからの送信を受信し、送信のうちの4つ以上のものから時間測定値を導出してもよい。MD100は、例えば、ポジション決定エンティティ(PDE)のようなロケーションサーバ104に、このような測定値を提供してもよい。ロケーションサーバ104は、このような測定値からMD100のロケーションを推定してもよい。代替的に、MD100は、例えば、SPS信号を利用することによって、それ自体のロケーションを推定してもよい。当然、SPSシステムのこのような応用は、単なる例であり、主張する主題事項は、これに限定されるものではない。さらにまた、SPS以外のポジショニング技術の信号を使用して、MDポジションを計算してもよい。例えば、他のこのようなポジション技術を利用することによって、MD100は、それ自体のロケーションを推定してもよいし、または、上述したように、ロケーションサーバを用いてもよい。
【0012】
図2は、インプリメンテーションにしたがった、MDのいくつかの可能性ある軌道を含む領域200を示している斜視図である。先に述べたように、このような領域は、SPS信号のような信号を捕捉するのに、MDにとって好ましくないRF環境を含んでいることがある。このような領域は、例えば、地下鉄を含むかもしれない。領域200は、例えば、1つ以上の通路、廊下、階段、エスカレータ、エレベータ、および/または地下鉄の列車を含んでいてもよい。MDを運んでいる人は、例えば、エントランス220において領域200に入り、その後、目的地240に対する1つ以上の可能性あるルートの選択に至るかもしれない。1つ以上の可能性の中の2つのルート、軌道480および490を図4中で示しており、以下で説明する。
【0013】
図3は、インプリメンテーションにしたがった、MDのロケーションを推定するプロセス300のフロー図であり、図4は、インプリメンテーションにしたがった、MDの軌道を示している概略図である。図1中で示されているMD100のようなMDは、例えば、プロセス300のブロック320におけるように、センサ測定値を取得するための、動きセンサ550(図5)を備えていてもよい。このような動きセンサは、例えば、多軸の加速度計、多軸の地磁気センサ(コンパス)および/または多軸のジャイロを含んでいてもよい。動きセンサはまた、気圧の圧力センサを含んでいてもよい。特定の例では、加速度計や、コンパスや、ジャイロは、3−軸センサを含んでいてもよい。ブロック330におけるように、MD100の動きの、現在および/または過去の軌道を推定するために、センサ測定値を使用してもよい。例えば、図4を参照すると、MD100は、エントランス220において領域200に入り、3次元の軌道を開始するかもしれない。この3次元の軌道は、ルート410に沿って、時々および/または周期的に、継続的に動きを測定することによって追跡され得る。このようなルート410は、例えば、左折450が続く移動と、階段の一番上での方向の変更455とが続き、そして、階段の一番下での方向の別の変更460と、左折465と、右折470とが続き、そして、方向分離475となる移動を含んでいてもよく、この分離は、例えば、エスカレータおよびエレベータを含んでいてもよい。特定のインプリメンテーションでは、軌道を決定するために、MD100の動きの、スピード、方向、および/またはタイムスパンを、MD100において測定および/または記憶してもよい。したがって、推定された軌道を提供するために、ルート410に沿った、測定した移動および/または方向の変更を使用してもよい。別の特定のインプリメンテーションでは、MD100は、ルート410に沿って位置付けられている1つ以上の固定されたビーコンから情報を取得するように適合させてもよい。このようなビーコンは、無線周波数識別(RFID)トランスポンダのようなニアフィールド通信(NFC)システムとともに、WiFi信号、ブルートゥース信号、UWB信号、WAN信号、デジタルTV信号、セルタワーID、および/または、例えば、ルート410に沿ったポジション決定をMDに提供し得る任意のデバイスのうちの少なくとも一部を含んでいてもよい。例えば、このようなビーコンから取得した情報は、動きセンサ測定値とともに、例えば、MD100の推定された軌道を提供するために使用し得る、1つ以上のポジション決定を提供してもよい。当然、軌道は、多数の方法によって推定してもよく、主張する主題事項は、ここで記述した例に限定されるものではない。
【0014】
インプリメンテーションでは、データベースは、1つ以上の領域に対する予め定められた候補の軌道を含んでいてもよい。言い換えると、データベースは、特定の領域中のユーザにとって利用可能な、可能性あるルートまたはパスに関する情報を含んでいてもよい。例えば、このようなデータベースは、ビルディング、地下鉄システム、都市、州、および/または国に対する予め定められた候補の軌道を含んでいてもよい。図4を再び参照すると、ロケーション475は、1つは軌道480に通じ、もう1つは軌道490に通じる2つのルート選択を、MD100を運んでいるユーザに対して提示してもよい。いかなるケースにおいても、動きセンサが取り付けられているMD100は、取られるいずれかのルートの軌道を推定するために、測定値を提供するかもしれない。したがって、データベースは、例えば、領域200の予め定められた候補の軌道として、このような軌道に関する情報を含んでいてもよい。このような情報は、地理的な情報、指向性情報および/または移動情報を含んでいてもよい。例えば、ルートの一部のような、階段の吹き抜けに関する地理的な情報、指向性情報および/または移動情報をデータベース中に記憶させてもよい。別の例では、都市を含む領域は、それぞれのビルディングが、比較的に多数の可能性あるルートを提供する廊下、階段、および/またはエレベータを有している、複数のビルディングを含んでいるかもしれない。このような非常に多くの可能性あるルートが存在することがあるかもしれないが、データベース中の候補の軌道は、一意的な軌道パターンを含んでいるかもしれず、このような一意性は、以下で説明するように、比較的に小さい領域に限定されるかもしれない。例えば、軌道480は、ロケーション475からロケーション495への移動および/または方向変更の一意的なパターンに対応しているかもしれない。軌道480のパターンに一致するルート410の他の部分がないので、このような軌道パターンは、図2の領域200中で示されているように一意的であるかもしれない。さらには、軌道480のパターンは、例えば、都市領域内の数ある領域パターンの中で一意的であるかもしれない。言い換えると、都市におけるビルディング中で取られ得る複数の可能性あるルートの中で、軌道480は一意的なパターンを含んでいるかもしれない。したがって、軌道480のパターンは、軌道480のロケーションを一意的に識別してもよく、これに対して、データベースが、例えば、ロケーション情報を含んでいてもよい。予想されるように、このような一意性は、州または国のような比較的に大きい領域に対する候補の軌道を含むデータベースには同様に適応されないかもしれない。このような大きい領域は、比較的に非常に多くの可能性あるルートと、関係する軌道パターンとを含んでいるかもしれない。このようなケースでは、2つの異なるロケーションが、軌道パターンに偶然に一致することを含む可能性は比較的に高いかもしれない。少なくともこの理由のために、以下で説明するような、データベース中の候補の軌道の数を減少させるためのESポジション情報が、望まれるかもしれない。
【0015】
上述したように、データベースは、複数のビルディングを含む都市のような領域に対する予め定められた候補の軌道を含んでいてもよく、ここで、それぞれのビルディングは、廊下、階段、および/またはエレベータを含んでいるかもしれない。さらには、このようなデータベースは、州および/または国のような、都市を越えてさらに遠くまで及ぶ領域の場合でも、予め定められた候補の軌道を含んでいてもよい。したがって、このようなデータベースは、比較的に大量のデータを含んでいるかもしれない。プロセス300のブロック340および350におけるように、インプリメンテーションにおいて、MD100に対して利用可能である場合に、ESポジション情報を使用して、候補の軌道の数を修正および/または減少させてもよい。例えば、ESポジション情報を取得することは、特定の都市内のMD100のロケーションを決定して、州全体から都市全体に、候補の軌道の数を狭めることを含んでいてもよい。別の例では、ESポジション情報を取得することは、特定の地下鉄に近い領域内のMD100のロケーションを決定し、都市全体から特定の地下鉄に関係するそれらの候補の軌道に、予め定められた候補の軌道の数を減らすことを含んでいてもよい。1つのインプリメンテーションでは、MD100が、SPS信号のような信号を捕捉するのに好ましいRF環境中にある間に、MD100によってESポジション情報を取得してもよい。このようなESポジション情報は、例えば、地下鉄領域におけるような好ましくないRF環境にMD100が入る前に決定してもよい。特定のインプリメンテーションでは、ESポジション情報によってMD100が位置していると決定されたロケーションにおける、または、ESポジション情報によってMD100が位置していると決定されたロケーションの近くの、領域に対する予め定められた候補の軌道のデータベースの少なくとも一部をMD100がダウンロードしてもよい。この方法では、MD100は、おそらく、記憶能力が限定されており、MD100のおおよそのロケーションに関するデータベースの一部分だけを記憶する必要がある。別の特定のインプリメンテーションでは、ESポジション情報によってMD100が位置していると決定されたロケーションにおける、または、ESポジション情報によってMD100が位置していると決定されたロケーションの近くの、領域に対する候補の軌道の予め記憶されているデータベースを、MD100が備えていてもよい。さらに別の特定のインプリメンテーションでは、MD100のロケーション決定を可能にし得る、SPS送信機のようなものからの信号の利用可能性に少なくとも部分的に依存して、ESポジション情報を捕捉する必要はない。このようなケースでは、MD100が現在動作しているかもしれないロケーションを含む可能性が比較的に高い予め定められた候補の軌道のデータベースの少なくとも一部を記憶するためのメモリを、MD100は備えていてもよい。例えば、このような記憶されているデータベースは、MD100にとって利用可能であった最後のSPS信号から前もって確立してもよい。さらに別の特定のインプリメンテーションでは、ユーザが、ESポジション情報のようなロケーション情報をMD100中に入力してもよい。例えば、MD100に対してSPS信号が利用可能でない場合に、アドレスのようなユーザ入力が入れられてもよい。さらなる別の例では、デジタルマップおよび/またはESポジション情報の利用可能性を持つMD100によって、可能性ある軌道を計算してもよい。当然、データベースを修正するための、このようなESポジション情報は、単なる例であり、主張する主題事項は、これに限定されるものではない。
【0016】
特定のインプリメンテーションでは、上記で説明したように、ブロック360において、動きセンサ550によって測定されたような推定された軌道と、例えば、データベース中に記憶されている1つ以上の予め定められた候補の軌道との比較に少なくとも部分的に基づいて、MD100のロケーションを決定してもよい。このような比較は、データベース中の候補の軌道の中の2次元または3次元の軌道の空間パターンおよび/または形状を、MD100に対して推定された軌道と解析的にマッチングすることを含んでいてもよい。特定のインプリメンテーションでは、空間パターンのマッチングは、例えば、データベース中で維持されている1つ以上の予め定められた候補の軌道との、MD100に対して推定された軌道の最小二乗適合解析を含んでいてもよい。当然、軌道を解析的に比較する他の方法は、最小二乗適合解析に限定されるものではなく、主張する主題事項は、これに限定されるものではない。1つのインプリメンテーションでは、いったん、MD100の推定された軌道のものと、候補の軌道のものとの間で、このようなパターンのマッチングが見出されると、MD100のロケーションを決定することができる。ここで、候補の軌道は、データベース中で維持されているロケーション情報を含んでいてもよい。
【0017】
図5は、1つのインプリメンテーションにしたがった、ワイヤレスネットワークと通信して、その動きを感知することができるデバイスの概略図である。特定のインプリメンテーションでは、図1中で示されているMS100のようなMSは、デバイス500を備えていてもよく、このデバイス500は、擬似距離測定値を決定するために、アンテナ514において受信されたSPS信号を処理し、アンテナ510を通してワイヤレス通信ネットワークと通信することができる。ここで、無線トランシーバ506は、データ、音声および/またはSMSメッセージのようなベースバンド情報により、RF搬送波信号を変調して、RF搬送波上に変調し、変調したRF搬送波を復調して、このようなベースバンド情報を取得するように適合させてもよい。アンテナ510は、ワイヤレス通信リンクを通して、変調されたRF搬送波を送信して、ワイヤレス通信リンクを通して、変調されたRF搬送波を受信するように適合させてもよい。
【0018】
ベースバンドプロセッサ508は、ワイヤレス通信リンクを通しての送信のために、中央処理ユニット(CPU)502からトランシーバ506にベースバンド情報を提供するように適合させてもよい。ここで、CPU502は、他のネットワーク(例えば、ジグビー(登録商標)、ブルートゥース、WiFi、ピアツーピア)に近いローカルインターフェース516から、このようなベースバンド情報を取得してもよく、このようなベースバンド情報は、例えば、環境知覚データ、動きセンサデータ、高度データ、(例えば、加速度計からの)加速情報を含んでいてもよい。このようなベースバンド情報はまた、ポジション情報を含んでいてもよく、例えば、このポジション情報は、デバイス500のロケーションの推定値、ならびに/あるいは、例えば、擬似距離測定値および/またはESポジション情報のような、同じものを計算する際に使用し得る情報のようなものがある。先に述べたように、このようなESポジション情報はまた、ユーザ入力から受け取ってもよい。CPU502は、測定された動きデータに少なくとも部分的に基づいて、デバイス500の軌道を推定するように適合させてもよい。CPU502はまた、候補の軌道を計算することができてもよい。チャネルデコーダ520は、ベースバンドプロセッサ508から受け取ったチャネルシンボルをデコードして、基礎となるソースビットにするように適合させてもよい。
【0019】
SPS受信機(SPSRx)512は、SVからの送信を受信して処理し、処理した情報を相関器518に提供するように適合させてもよい。相関器518は、受信機512によって提供された情報から相関関数を導出するように適合させてもよい。相関器518はまた、トランシーバ506によって提供されたパイロット信号に関連する情報から、パイロットに関連する相関関数を導出するように適合させてもよい。この情報は、ワイヤレス通信ネットワークを捕捉するためのデバイスによって使用してもよい。
【0020】
メモリ504は、機械読み取り可能な命令を記憶するように適合させてもよく、機械読み取り可能な命令は、プロセス、例、インプリメンテーション、または記述または示唆しているこれらの例のうちの1つ以上のものを実行するように実行可能である。CPU502は、このような機械読み取り可能な命令にアクセスするように、および、このような機械読み取り可能な命令を実行するように適合させてもよい。しかしながら、特定の態様では、これらは、CPUによって実行し得るタスクの単なる例であり、主張する主題事項は、これらの点に限定されるものではない。さらに、メモリ504は、1つ以上の予め定められた候補の軌道を記憶するように適合させてもよく、ここでは、CPU502は、推定した軌道と1つ以上の予め定められた候補の軌道との比較に少なくとも部分的に基づいて、デバイス500のロケーションを決定するように適合させてもよい。特定のインプリメンテーションでは、CPU502は、ESポジション情報に少なくとも部分的に基づいて、1つ以上の予め定められた候補の軌道の数を減少させるように適合させてもよい。
【0021】
インプリメンテーションでは、動きセンサ550は、デバイス500の動きを測定するための1つ以上のトランデューサを備えていてもよい。このようなトランデューサは、例えば、加速度計、コンパス、圧力センサ、および/またはジャイロを備えていてもよい。デバイス500のこのような動きは、回転および/または移行を含んでいてもよい。先に説明したように、例えば、デバイス500の軌道を決定する際に使用するために、記憶した測定値を導出できるように、1つ以上のこのような動きの測定値をメモリ504中に記憶させてもよい。
【0022】
ここで記述した方法論は、特定の特徴および/または例にしたがった応用に依存したさまざまな手段によって実現してもよい。例えば、このような方法論は、ハードウェア、ファームウェア、ソフトウェア、および/またはこれらのものを組み合わせたもので実現してもよい。ハードウェアインプリメンテーションでは、処理ユニットは、例えば、1つ以上の特定用途向け集積回路(ASIC)、デジタルシグナルプロセッサ(DSP)、デジタル信号処理デバイス(DSPD)、プログラマブルロジックデバイス(PLD)、フィールドプログラマブルゲートアレイ(FPGA)、プロセッサ、制御装置、マイクロ制御装置、マイクロプロセッサ、電子デバイス、ここで記述した機能を実行するように設計されている他のデバイスユニット、および/または、これらを組み合わせたもの内で実現してもよい。
【0023】
ファームウェアおよび/またはソフトウェアインプリメンテーションでは、方法論は、ここで記述した機能を実行するモジュール(例えば、手順、機能等)で実現してもよい。ここで記述した方法論を実現する際に、命令を有機的に具現化する任意の機械読み取り可能媒体を使用してもよい。例えば、ソフトウェアコードは、メモリ中に、例えば、移動局のメモリ中に記憶させ、プロセッサによって実行してもよい。メモリは、プロセッサ内で、または、プロセッサの外部で実現してもよい。ここで使用した「メモリ」という用語は、任意のタイプの、長期メモリ、短期メモリ、揮発メモリ、不揮発メモリ、または他のメモリを意味し、メモリの何からの特定のタイプまたはメモリの数、あるいはメモリが記憶されるメディアのタイプに限定されるものではない。
【0024】
ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)等のような、さまざまなワイヤレス通信ネットワークに対して、ここで記述した、ポジション決定および/または推定技術を使用してもよい。「ネットワーク」および「システム」という用語は、ここで互換性があるように使用してもよい。WWANは、コード分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク等であってもよい。CDMAネットワークは、無線技術の例をいくつか挙げると、cdma2000、ワイドバンド−CDMA(W−CDMA)のような1つ以上の無線アクセス技術(RAT)を実現してもよい。ここで、cdma2000は、IS−95、IS−2000、およびIS−856標準規格にしたがって実現される技術を含んでいてもよい。TDMAネットワークは、グローバルシステムフォーモバイル通信(GSM)(登録商標)、デジタルアドバンスド移動体電話機システム(D−AMPS)、または他の何らかのRATを実現してもよい。GSMおよびW−CDMAは、「第3世代パートナーシッププロジェクト」(3GPP)と名付けられているコンソーシアムによる文書中に記述されている。Cdma2000は、「第3世代パートナーシッププロジェクト2」(3GPP2)と名付けられているコンソーシアムによる文書中に記述されている。3GPPおよび3PGG文書は、公的に入手可能である。WLANは、IEEE802.11xネットワークを含んでいてもよく、WPANは、例えば、ブルートゥースネットワーク、IEEE802.15xを含んでいてもよい。また、WWAN、WLAN、および/またはWPANのうちの任意のものを組み合わせたものに対して、ここで記述したこのようなポジション決定技術を使用してもよい。
【0025】
いくつかのSPSのうちの任意のもの、および/または、SPSを組み合わせたものとともに、ここで記述した技術を使用してもよい。さらには、擬似衛星を、または、衛星と擬似衛星とを組み合わせたものを利用するポジショニング決定システムとともに、このような技術を使用してもよい。擬似衛星は、時間と同期されることがあり、L帯域(または他の周波数)搬送波信号上で変調されるPNコードまたは(例えば、GPSまたはCDMAセルラ信号に類似した)他のレンジングコードをブロードキャストする地上ベースの送信機を備えていてもよい。遠隔受信機による識別を可能にするように、このような送信機に、一意的なPNコードが割り当てられることがある。トンネル、鉱山、ビルディング、都市の谷間、または他の閉じられたエリアにおけるような、軌道衛星からのGPS信号が入手不可能である状況では、擬似衛星は役立つかもしれない。擬似衛星の別のインプリメンテーションは、無線ビーコンとして知られている。ここで使用する用語「衛星」は、擬似衛星、擬似衛星の均等物、そして場合によっては他のものを含むことを意図している。ここで使用する用語「SPS信号」は、擬似衛星からのSPSと同様な信号、または、擬似衛星の均等物を含むことを意図している。
【0026】
ワイヤレス端末のようなエンティティは、データおよび他のリソースを要求するためにネットワークと通信してもよい。セルラ電話機、パーソナルデジタルアシスタント(PDA)、またはワイヤレスコンピュータを含む移動体デバイス(MD)は、このようなエンティティのほんの数例である。このようなエンティティの通信は、ネットワークデータにアクセスすることを含んでいてもよく、ネットワークデータにアクセスすることは、通信ネットワークのリソース、回路、または他のシステムハードウェアに重い負担をかけることがある。ワイヤレス通信ネットワークでは、ネットワーク中で動作しているエンティティ間で、データを要求および交換してもよい。例えば、MDは、ネットワーク内で動作しているMDのポジションを決定するためのデータを、ワイヤレス通信ネットワークから要求してもよい:ネットワークから受信したデータは、このようなポジション決定に対して、有益であるかもしれず、またはそうでなければ望ましいかもしれない。しかしながら、特定の態様では、これらは、MDとネットワークとの間のデータ交換の単なる例であり、主張する主題事項は、これらの点に限定されるものではない。
【0027】
例示的な特徴であると現在考えられるものを示し、説明したが、主張する主題事項から逸脱することなく、さまざまな他の改良が行われ、均等物が置換されてよいことが当業者によって理解されるだろう。さらに、ここで記述した中心の概念から逸脱することなく、主張する主題事項の教示に特定の状況を適応させるために、多くの改良が行われてもよい。したがって、主張する主題事項は開示されている特定の例に限られておらず、このような主張する主題事項は、また、添付した特許請求の範囲の範囲内に入るすべての態様と、これらの均等物とを含んでいてもよいことが意図されている。
【特許請求の範囲】
【請求項1】
方法において、
移動体デバイスにおける少なくとも1つのセンサによって実行される3次元のセンサ測定に少なくとも部分的に基づいて、前記移動体デバイスの動きの3次元の軌道を推定することと、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定することとを含む方法。
【請求項2】
前記移動体デバイスに対する外部からソース供給される(ES)ポジション情報を取得することと、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させることをさらに含む請求項1記載の方法。
【請求項3】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項2記載の方法。
【請求項4】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶することをさらに含む請求項2記載の方法。
【請求項5】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項2記載の方法。
【請求項6】
前記ESポジション情報は、ユーザ入力に少なくとも部分的に基づいている請求項2記載の方法。
【請求項7】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中のものである請求項1記載の方法。
【請求項8】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通して、ロケーション情報の受信を可能にしない前記RF環境中のものである請求項1記載の方法。
【請求項9】
加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項1記載の方法。
【請求項10】
前記推定された3次元の軌道と、前記1つ以上の予め定められた候補の3次元の軌道との前記比較は、最小二乗適合解析を含む請求項1記載の方法。
【請求項11】
移動体デバイスにおいて、
前記移動体デバイスの動きを測定するセンサと、
前記測定された動きに少なくとも部分的に基づいて、前記移動体デバイスの3次元の軌道を推定するプロセッサと、
1つ以上の予め定められた候補の軌道を記憶するメモリとを具備し、
前記プロセッサは、前記推定された3次元の軌道と、前記1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定するように適合されている移動体デバイス。
【請求項12】
1つ以上の衛星ポジショニングシステム(SPS)信号を捕捉するようにと、
ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいて、外部からソース供給される(ES)ポジション情報を取得するように、RF環境中で動作するように適合されている受信機をさらに具備する請求項11記載の移動体デバイス。
【請求項13】
前記プロセッサは、前記ESポジション情報に少なくとも部分的に基づいて、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させるように適合されている請求項12記載の移動体デバイス。
【請求項14】
前記移動体デバイスは、
ユーザ入力から、前記移動体デバイスに対するESポジション情報を受信するようにと、
前記ESポジション情報に少なくとも部分的に基づいて、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させるように適合されている請求項11記載の移動体デバイス。
【請求項15】
前記移動体デバイスの前記動きは、前記移動体デバイスに対する、衛星ポジションシステム信号と、ワイヤレス通信とをサポートしないRF環境中のものである請求項11記載の移動体デバイス。
【請求項16】
加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項11記載の移動体デバイス。
【請求項17】
物品において、
コンピューティングプラットフォームによって実行される場合に、
前記コンピューティングプラットフォームが、
前記移動体デバイスにおいて行われるセンサ測定に少なくとも部分的に基づいて、移動体デバイスの動きの3次元の軌道を推定することと、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定することとを可能にするように適合されている、そこに記憶されている機械読み取り可能命令を含む記憶媒体を具備する物品。
【請求項18】
前記命令は、前記コンピューティングプラットフォームによって実行される場合に、
前記コンピューティングプラットフォームが、
前記移動体デバイスに対する外部からソース供給される(ES)ポジション情報を取得することと、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させることとを可能にするようにさらに適合されている請求項17記載の物品。
【請求項19】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項18記載の物品。
【請求項20】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶することをさらに含む請求項18記載の物品。
【請求項21】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項18記載の物品。
【請求項22】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中において生じる請求項17記載の物品。
【請求項23】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通してロケーション情報の受信を可能にしない前記RF環境中において生じる請求項17記載の物品。
【請求項24】
前記命令は、前記コンピューティングプラットフォームによって実行される場合に、前記コンピューティングプラットフォームが、加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することを可能にするようにさらに適合されている請求項17記載の物品。
【請求項25】
装置において、
移動体デバイスにおいて行われるセンサ測定に少なくとも部分的に基づいて、前記移動体デバイスの動きの3次元の軌道を推定する手段と、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定する手段とを具備する装置。
【請求項26】
前記移動体デバイスに対するESポジション情報を取得する手段と、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させる手段とをさらに具備する請求項25記載の装置。
【請求項27】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項26記載の装置。
【請求項28】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶する手段をさらに具備する請求項26記載の装置。
【請求項29】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項26記載の装置。
【請求項30】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中のものである請求項25記載の装置。
【請求項31】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通してロケーション情報の受信を可能にしない前記RF環境中のものである請求項25記載の装置。
【請求項32】
加速度計および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項25記載の装置。
【請求項33】
コンパスおよび/または圧力センサを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項25記載の装置。
【請求項1】
方法において、
移動体デバイスにおける少なくとも1つのセンサによって実行される3次元のセンサ測定に少なくとも部分的に基づいて、前記移動体デバイスの動きの3次元の軌道を推定することと、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定することとを含む方法。
【請求項2】
前記移動体デバイスに対する外部からソース供給される(ES)ポジション情報を取得することと、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させることをさらに含む請求項1記載の方法。
【請求項3】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項2記載の方法。
【請求項4】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶することをさらに含む請求項2記載の方法。
【請求項5】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項2記載の方法。
【請求項6】
前記ESポジション情報は、ユーザ入力に少なくとも部分的に基づいている請求項2記載の方法。
【請求項7】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中のものである請求項1記載の方法。
【請求項8】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通して、ロケーション情報の受信を可能にしない前記RF環境中のものである請求項1記載の方法。
【請求項9】
加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項1記載の方法。
【請求項10】
前記推定された3次元の軌道と、前記1つ以上の予め定められた候補の3次元の軌道との前記比較は、最小二乗適合解析を含む請求項1記載の方法。
【請求項11】
移動体デバイスにおいて、
前記移動体デバイスの動きを測定するセンサと、
前記測定された動きに少なくとも部分的に基づいて、前記移動体デバイスの3次元の軌道を推定するプロセッサと、
1つ以上の予め定められた候補の軌道を記憶するメモリとを具備し、
前記プロセッサは、前記推定された3次元の軌道と、前記1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定するように適合されている移動体デバイス。
【請求項12】
1つ以上の衛星ポジショニングシステム(SPS)信号を捕捉するようにと、
ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいて、外部からソース供給される(ES)ポジション情報を取得するように、RF環境中で動作するように適合されている受信機をさらに具備する請求項11記載の移動体デバイス。
【請求項13】
前記プロセッサは、前記ESポジション情報に少なくとも部分的に基づいて、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させるように適合されている請求項12記載の移動体デバイス。
【請求項14】
前記移動体デバイスは、
ユーザ入力から、前記移動体デバイスに対するESポジション情報を受信するようにと、
前記ESポジション情報に少なくとも部分的に基づいて、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させるように適合されている請求項11記載の移動体デバイス。
【請求項15】
前記移動体デバイスの前記動きは、前記移動体デバイスに対する、衛星ポジションシステム信号と、ワイヤレス通信とをサポートしないRF環境中のものである請求項11記載の移動体デバイス。
【請求項16】
加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項11記載の移動体デバイス。
【請求項17】
物品において、
コンピューティングプラットフォームによって実行される場合に、
前記コンピューティングプラットフォームが、
前記移動体デバイスにおいて行われるセンサ測定に少なくとも部分的に基づいて、移動体デバイスの動きの3次元の軌道を推定することと、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定することとを可能にするように適合されている、そこに記憶されている機械読み取り可能命令を含む記憶媒体を具備する物品。
【請求項18】
前記命令は、前記コンピューティングプラットフォームによって実行される場合に、
前記コンピューティングプラットフォームが、
前記移動体デバイスに対する外部からソース供給される(ES)ポジション情報を取得することと、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させることとを可能にするようにさらに適合されている請求項17記載の物品。
【請求項19】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項18記載の物品。
【請求項20】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶することをさらに含む請求項18記載の物品。
【請求項21】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項18記載の物品。
【請求項22】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中において生じる請求項17記載の物品。
【請求項23】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通してロケーション情報の受信を可能にしない前記RF環境中において生じる請求項17記載の物品。
【請求項24】
前記命令は、前記コンピューティングプラットフォームによって実行される場合に、前記コンピューティングプラットフォームが、加速度計、コンパス、圧力センサ、および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することを可能にするようにさらに適合されている請求項17記載の物品。
【請求項25】
装置において、
移動体デバイスにおいて行われるセンサ測定に少なくとも部分的に基づいて、前記移動体デバイスの動きの3次元の軌道を推定する手段と、
前記推定された3次元の軌道と、1つ以上の予め定められた候補の3次元の軌道との比較に少なくとも部分的に基づいて、前記移動体デバイスのロケーションを推定する手段とを具備する装置。
【請求項26】
前記移動体デバイスに対するESポジション情報を取得する手段と、
前記ESポジション情報を使用して、前記1つ以上の予め定められた候補の3次元の軌道の数を減少させる手段とをさらに具備する請求項25記載の装置。
【請求項27】
前記ESポジション情報は、ニアフィールド通信(NFC)信号、WiFi信号、ブルートゥース信号、ウルトラワイドバンド(UWB)信号、ワイドエリアネットワーク(WAN)信号、デジタルTV信号、および/またはセルタワーIDに少なくとも部分的に基づいている請求項26記載の装置。
【請求項28】
前記ESポジション情報が利用可能でない場所に前記移動体デバイスが位置付けられた時間の少なくとも一部の間に、前記取得したESポジション情報を記憶する手段をさらに具備する請求項26記載の装置。
【請求項29】
前記ESポジション情報は、前記移動体デバイスにおける、1つ以上の衛星ポジショニングシステム信号の捕捉に少なくとも部分的に基づいている請求項26記載の装置。
【請求項30】
前記移動体デバイスの動きの前記3次元の軌道は、衛星ポジションシステム信号の捕捉を可能にしないRF環境中のものである請求項25記載の装置。
【請求項31】
前記移動体デバイスの動きの前記3次元の軌道は、RF環境の外部からワイヤレス通信を通してロケーション情報の受信を可能にしない前記RF環境中のものである請求項25記載の装置。
【請求項32】
加速度計および/またはジャイロを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項25記載の装置。
【請求項33】
コンパスおよび/または圧力センサを使用して、前記移動体デバイスの動きの前記3次元の軌道を測定することをさらに含む請求項25記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2012−532319(P2012−532319A)
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−517898(P2012−517898)
【出願日】平成22年6月30日(2010.6.30)
【国際出願番号】PCT/US2010/040654
【国際公開番号】WO2011/002919
【国際公開日】平成23年1月6日(2011.1.6)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成22年6月30日(2010.6.30)
【国際出願番号】PCT/US2010/040654
【国際公開番号】WO2011/002919
【国際公開日】平成23年1月6日(2011.1.6)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]