
軌道予測装置、及び軌道予測方法
【課題】演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備える。
【解決手段】測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、軌道予測装置、及び軌道予測方法に関する。
【背景技術】
【0002】
GPS(Global Positioning System)は、位置測定、測量などに用いられている。地球上空の6つの軌道を24機以上のGPS衛星が周回し、各GPS衛星は、アルマナック(Almanac)データとエフェメリス(Ephemeris)データの二種類の軌道情報を含む航法メッセージを送信している。
カーナビゲーション装置などのGPS受信機は、この航法メッセージを用いてGPS衛星からGPS受信機までの信号到達時間を測定する。そしてGPS受信機は、信号到達時間に光速を掛けることでGPS衛星とGPS受信機間の距離(擬似距離)を求めている。この作業を4機以上の衛星に対して行うことで、受信機の位置を三次元上で算出している。アルマナック・データは、軌道上における全ての衛星に関する軌道情報であり、1日に1回、データが更新される。エフェメリス・データには、各衛星の正確な位置情報と信号を発射した時刻情報が含まれており、2時間毎にデータが更新される。
【0003】
GPS受信機は、受信した各情報を自機の記憶部に、例えば電源を切る前に受信したアルマナック・データとエフェメリス・データを保存している。これらの情報には、各々有効期限がある。GPS受信機の電源がオン状態で、GPS衛星からの送信情報を送信毎に受信できていない場合など、GPS受信機は、再度、送信情報を受信する必要がある。
アルマナック・データの再受信に要する時間は、例えば12分30秒であり、エフェメリス・データの再受信に要する時間は、30秒である。
どちらかのデータの有効期限が切れにより再受信している期間、GPS受信機は、位置測定を行えない。このため、エフェメリス・データの有効期限が切れた場合、GPS受信機は、以前受信したエフェメリス・データを用いて、現在のGPS衛星の位置を予測し、現在のエフェメリス・データが利用できない場合に現在のGPS衛星の状態を使用して位置測定を行うことが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7839330号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の従来技術では、測位を行う際に用いる推定パラメータの個数が多いため、演算にかかるコストが高いという課題があった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであって、演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明に係る軌道予測装置は、測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備えることを特徴としている。
【0008】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星の半径方向と進行方向及び軌道面垂直方向との成分による座標系に変換する行列を用いて前記推定パラメータを推定するようにしてもよい。
【0009】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星の位置の進行方向成分に対して予め算出された値を用い、前記測位衛星の速度の軌道面垂直方向成分に対して予め算出された値を用い、前記推定パラメータを推定するようにしてもよい。
【0010】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星に対する太陽輻射圧のワイバイアスとスケール係数とに対して各々予め算出した値を用い、前記推定パラメータを推定するようにしてもよい。
【0011】
上記目的を達成するため、本発明は、軌道予測装置における軌道予測方法であって、情報取得部が、測位衛星からの信号を受信して受信データを取得する情報取得過程と、衛星位置速度算出部が、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出過程と、推定パラメータ部が、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽輻射圧の影響を示す値及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ過程と、軌道予測部が、前記推定パラメータ手順で推定された前記推定パラメータを用いて前記測位衛星の位置を推定する軌道予測過程と、を含むことを特徴としている。
【発明の効果】
【0012】
本発明によれば、軌道における測位衛星の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルと、位置速度情報とを用いて、測位衛星の位置と測位衛星の速度と太陽から測位衛星への光の圧力である太陽輻射圧の影響及び地球自転の影響を含む推定パラメータを算出するようにした。このように測位衛星の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルを用いて推定パラメータを推定するため、推定するパラメータを削減することができる。この結果、最小二乗法で用いる行列を従来技術より小さくできるので、推定に必要なメモリ容量を削減できる。また、最小二乗法で用いる行列を小さくできるので、演算に係る時間を短くできる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態に係る軌道予測装置10の概略ブロック図である。
【図2】同実施形態に係る過去のGPS衛星位置と速度データを記憶させる処理のフローチャートである。
【図3】同実施形態に係る衛星位置・速度記憶部140に記憶される情報と、削除される情報の一例を説明する図である。
【図4】保存間隔毎の予測誤差の一例を説明する図である。
【図5】同実施形態に係る軌道予測を行う処理手順のフローチャートである。
【図6】第2実施形態に係る衛星位置p0(i)の軌道計算の処理手順のフローチャートである。
【発明を実施するための形態】
【0014】
[第1実施形態]
以下、図面を用いて、本発明の実施形態について説明する。
まず、一般的なGPS衛星の軌道予測の概略原理について説明する。
【0015】
地球上空の6つの軌道を24機以上のGPS(Global Positioning System)衛星(以下、衛星という)が周回し、各衛星は、航法メッセージを送信している。航法メッセージは、フレームを単位に送信している。1フレームの送信には、30秒を要する。1フレームは、5組のサブフレームで構成され、サブフレーム1から5が順番に送信される。また、サブフレーム1から3は、各衛星に固有の情報を含み、毎回同じ内容で構成される。サブフレーム4と5は、全衛星が同じ内容の情報で構成され、サブフレーム毎にページ1から25で構成されている。このため、サブフレーム4と5の全ての情報を送信するには、25フレームが必要である。このため、GPS受信機が航法メッセージの全情報を得るには、12分30秒の時間がかかる。サブフレーム1は、各衛星の状態(正常に動作しているか否か)、衛星が送信する衛星のクロック誤差を補正するための係数であるクロック補正係数などにより構成されている。サブフレーム2は、各衛星の軌道情報(エフェメリス(Ephemeris)・データ)1/2で構成されている。サブフレーム3は、各衛星の軌道情報(エフェメリス・データ)2/2で構成されている。サブフレーム4は、GPS受信機が受信する信号が、電離層により遅延する量を補正するための係数である電離層遅延補正係数、GPS時刻とUTC(協定世界時間;Universal Time, Coordinated))との関係を表す情報であるUTC関係情報、全衛星の軌道情報(アルマナック(Almanac)・データ)1/2などで構成されている。サブフレーム5は、全衛星の軌道情報(アルマナック・データ)2/2で構成されている。また、各サブフレームの先頭には、GPS時刻を示す情報が含まれている。なお、GPS時刻とは、1週間を単位として衛星で管理されている時間であり、毎週、日曜日の0時からの経過時間で表される情報である。
【0016】
また、エフェメリス・データは、衛星の位置を計算するために必要な軌道の6要素(昇交点赤経、軌道傾斜角、近地点引数、軌道長半径、離心率、真近点角)のデータ、各補正値、及び軌道のエポック時刻toe(軌道の元期(ephemeris reference time))などにより構成されている。エフェメリス・データは、2時間毎に更新される。また、エフェメリス・データの有効期間は、2時間±2時間である。
アルマナック・データは、各衛星の軌道情報である。また、アルマナック・データは、約1日に1度の頻度で更新されている。また、アルマナック・データの有効期間は、エポック時刻±3日間である。
【0017】
GPS受信機は、受信したこれらのデータを記憶部に記憶する。記憶されているアルマナック・データ及びエフェメリス・データ共に有効な状態から、GPS受信機が測位を開始することをホット・スタートという。また、エフェメリス・データが無効でありアルマナック・データのみ有効な状態から、GPS受信機が測位を開始することをウォーム・スタートという。アルマナック・データ及びエフェメリス・データ共に無効な状態から、GPS受信機が測位を開始することをコールド・スタートという。
そして、ホット・スタートの場合、GPS受信機は、電源投入後に最初の位置情報が出力されるまでの時間は、記憶されているエフェメリス・データを用いて測位できるので数秒程度である。一方、ウォーム・スタートの場合、GPS受信機は、エフェメリス・データを再取得する必要があるので、取得に30秒以上の時間がかかり、さらに取得したエフェメリス・データの検査にも時間がかかる。このため、ウォーム・スタート場合、電源投入後に最初の位置情報が出力されるまでの時間は、30秒以上である。さらに、コールド・スタートの場合、全ての航法メッセージを取得する必要があるので、測位信号の捕獲と航法メッセージの取得に数分〜12分30秒かかる。このため、電源投入後に最初の位置情報が出力されるまでの時間は、数分〜12分30秒以上である。
【0018】
軌道予測とは、以前収集されたエフェメリス・データを利用し、未来の衛星位置を予測する技術である。軌道予測装置は、この予測した衛星位置を測位に用いることで、ウォーム・スタート時にエフェメリス・データの受信完了を待たずに測位開始することができるため、GPS初期位置算出時間(TTFF)を短縮することができる。GPS受信機が衛星からの情報取得後、電源オフ状態の期間が短ければ、以前取得したデータを用いて、衛星の位置を把握でききるため、データの再取得までの時間が短くなる。
そして、軌道予測装置は、エフェメリス・データから計算される衛星位置・速度をバックアップ・メモリに保存する。次に、軌道予測装置は、軌道予測計算に必要なデータが揃い次第、軌道予測パラメータを推定し、推定した軌道予測パラメータを使用して軌道を予測する。次に、軌道予測装置は、予測した軌道をバックアップ・メモリへ保存する。そして、軌道予測装置は、エフェメリス・データが無効の時、バックアップ・メモリに保存された予測した軌道を使用して衛星位置を計算する。
【0019】
衛星の位置は、衛星の初期位置と初期速度が与えられ、衛星にかかる加速度が計算され、積分が行われることで、計算される。衛星にかかる加速度ベクトルasatは、地球重力定数をGMe、地球中心から衛星までの位置ベクトルをrとし、地球重力の地球非球面による加速度ベクトルをa1、太陽重力による加速度ベクトルをa2、月重力による加速度ベクトルをa3、太陽輻射圧による加速度ベクトルをa4とすると、次式(1)のように表される。なお、太陽輻射圧とは、太陽から飛んでくる光子(Photon)がGPS衛星2の表面に衝突して発生する力である。
【0020】
【数1】

【0021】
一般的な軌道予測プログラムでは、式(1)の加速度asatを数値積分により時間積分することで、GPS衛星の位置と速度を算出する。用いる数値積分法は、例えば、RKF45(ルンゲクッタフェールベルグ法;Runge-Kutta-Fehlberg method)及びCowellである。
【0022】
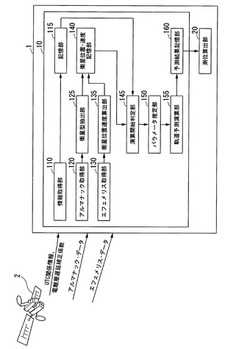
次に、本実施形態に係る軌道予測装置の構成について、図1を用いて説明する。図1は、本実施形態に係るGPSの概略ブロック図である。
図1に示すように、GPSは、測位装置1、GPS衛星2から構成されている。測位装置(GPS受信機)1は、軌道予測装置10、測位算出部20を備えている。なお、GPS衛星2は、1機ではなく、24機以上の衛星から構成される。
軌道予測装置10は、情報取得部110、記憶部115、アルマナック取得部120、衛星型抽出部125、エフェメリス取得部130、衛星位置速度算出部135、衛星位置・速度記憶部140、演算開始判定部145、パラメータ推定部150、軌道予測演算部155、予測結果記憶部160を備えている。
【0023】
情報取得部110は、GPS衛星2が送信する航法メッセージから、UTC関係情報、GPS時刻、電離層遅延補正係数を取得し、取得したGPS時刻、UTC関係情報と電離層遅延補正係数を記憶部115に記憶させる。
記憶部115には、GPS時刻、UTC関係情報と電離層遅延補正係数が記憶されている。
【0024】
アルマナック取得部120(情報取得部)は、GPS衛星2が送信したアルマナック・データを取得し、取得したアルマナック・データを衛星型抽出部125に出力する。
衛星型抽出部125は、アルマナック取得部120が出力するアルマナック・データから衛星型番号を抽出し、抽出した衛星型番号を衛星位置・速度記憶部140に記憶させる。なお、衛星型番号とは、Block IIA,Block IIR,Block IIR−M,Block IIFなどのGPS衛星2の型を示す番号である。
【0025】
エフェメリス取得部130(情報取得部)は、GPS衛星2が送信するエフェメリス・データを取得し、取得したエフェメリス・データを衛星位置速度算出部135に出力する。
【0026】
衛星位置速度算出部135は、エフェメリス取得部130が出力したエフェメリス・データから衛星の状態(Health)を抽出する。衛星位置速度算出部135は、抽出した衛星の状態が健康であるか否かを判別する。衛星の状態とは、衛星の状態を表すコードで、0以外は何らかの異常が衛星にあることを示している。
衛星の状態が健康であると判別した場合、衛星位置速度算出部135は、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する。衛星位置速度算出部135は、衛星位置・速度記憶部140に記憶されているGPS衛星2の位置と速度情報(以下、位置速度情報という)の内、算出した時刻TOE2−3日より以前の情報を保存領域から削除する。時刻TOE2−3日より以前の情報を保存領域から削除する理由は、エフェメリス・データを均等に3日分記憶させるためである。後述するように、このように均等に3日分、記憶させたエフェメリス・データを用いて軌道予測装置10が軌道予測を行った場合、予測誤差が少なくなるためである。
衛星位置速度算出部135は、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されているか否かを判別する。衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合、後述するように、衛星位置速度算出部135は、TOE2の位置速度情報を削除後、衛星位置・速度記憶部140の保存領域の空きが、2個分の位置速度情報を記憶できる領域になるまで情報を削除する。衛星位置速度算出部135は、時刻TOE2と時刻TOE2+2時間の各時刻の各GPS衛星2の各位置と各速度を算出し、算出した2つの時刻の位置と速度を位置速度情報として衛星位置・速度記憶部140に記憶させる。
衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合、後述するように、衛星位置速度算出部135は、衛星位置・速度記憶部140の保存領域の空きが、3個分の位置速度情報を記憶できる領域になるまで情報を削除する。衛星位置速度算出部135は、時刻TOE2、時刻TOE−2時間、及び時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出し、算出した2つの時刻の位置と速度を位置速度情報として衛星位置・速度記憶部140に記憶させる。
【0027】
衛星位置・速度記憶部140には、衛星型番号、各GPS衛星2における各時刻の位置速度情報が記憶されている。
演算開始判定部145は、衛星位置・速度記憶部140から過去の位置速度情報、衛星型番号を読み出し、記憶部115からGPS時刻、UTC関係情報及び電離層遅延補正係数を読み出す。演算開始判定部145は、読み出した情報に基づき、後述する演算開始条件を満たしているか否かを判定する。演算開始条件を満たしていると判別した場合、演算開始判定部145は、パラメータ推定部150に読み出した情報と判定結果を出力する。
【0028】
パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、推定パラメータsを推定する。パラメータ推定部150は、推定した推定パラメータを軌道予測演算部155に出力する。なお、推定パラメータsは、後述するように11個の成分を有するベクトルである。
軌道予測演算部(軌道予測部)155は、パラメータ推定部150が出力する推定パラメータsを使用し、後述するように、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。軌道予測演算部155は、算出した予測軌道値を予測結果記憶部160に記憶させる。
予測結果記憶部160には、予測軌道値が記憶されている。
測位算出部20は、予測結果記憶部160に記憶されている予測軌道値を読み出し、読み出した予測軌道値を外挿して衛星位置を算出し、公知の手法で位置測位を行う。
【0029】
なお、軌道予測装置10は、航法メッセージを受信し、受信した航法メッセージを復調して、復調した航法メッセージから各データを抽出する。情報取得部110とアルマナック取得部120及びエフェメリス取得部130は、この抽出された各データを取得している。例えば、情報取得部110が航法メッセージを復調し、復調した航法メッセージから各データを抽出し、抽出した各情報を衛星型抽出部125及び衛星位置速度算出部135に出力し、記憶部115に書き込むようにしてもよい。また、記憶部115、衛星位置・速度記憶部140、及び予測結果記憶部160に分ける例を説明したが、これらの記憶部をまとめて1つの記憶部に記憶させるようにしてもよい。
【0030】
軌道予測装置10が行う処理について説明する。
まず、軌道予測装置10は、航法データの取得を開始する。
次に、アルマナック取得部120は、GPS衛星2が送信するアルマナック・データを取得し、取得したアルマナック・データを衛星型抽出部125に出力する。
次に、衛星型抽出部125は、アルマナック取得部120が出力するアルマナック・データから衛星型番号を抽出し、抽出した衛星型番号を衛星位置・速度記憶部140に記憶させる。
次に、情報取得部110は、GPS衛星2が送信する航法メッセージのサブフレーム4のデータから、電離層遅延補正係数、GPS時刻、及びUTC関係情報を取得し、取得した電離層遅延補正係数、GPS時刻、及びUTC関係情報を記憶部115に記憶させる。
【0031】
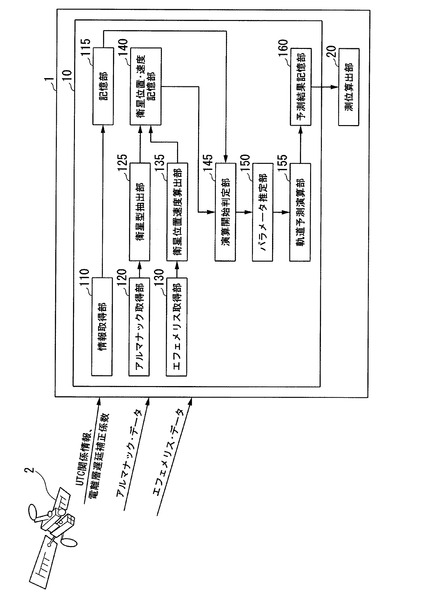
次に、過去のGPS衛星の位置と速度データを記憶させる処理について、図2を用いて説明する。図2は、本実施形態に係る過去のGPS衛星の位置と速度データを記憶させる処理のフローチャートである。
【0032】
(ステップS1)エフェメリス取得部130は、GPS衛星2からエフェメリス・データが送信されるのを待つ。GPS衛星2からエフェメリス・データが送信された場合、エフェメリス取得部130は、GPS衛星2が送信するエフェメリス・データを取得し、取得したエフェメリス・データを衛星位置速度算出部135に出力する。ステップS1終了後、ステップS2に進む。
【0033】
(ステップS2)衛星位置速度算出部135は、エフェメリス取得部130が出力するエフェメリス・データから各衛星の状態を抽出する。衛星位置速度算出部135は、抽出した各衛星の状態が異常を示す値ではないか否か且つエポック時刻toeが更新されたデータであるか否かを判別する。
各衛星の状態が異常を示す値ではない、すなわち健康であり且つエポック時刻toeが更新されたデータであると判別した場合(ステップS2;Yes)、ステップS3に進む。各衛星の状態が異常を示す値である、または、エポック時刻toeが更新されたデータではないと判別した場合(ステップS2;No)、ステップS1に戻る。
【0034】
(ステップS3)各衛星の状態が異常を示す値ではない且つエポック時刻toeが更新されたデータであると判別した場合、衛星位置速度算出部135は、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する。なお、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する理由は、GPS衛星2から送信されたエポック時刻toeが、2時間間隔ではなく、まれにずれることがあるためである。
時刻TOE2を時刻t(k)(k=0,・・・,n−1)と表現する。以降の処理上、位置はr(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での位置のx成分がr(3k)、位置のy成分がr(3k+1)、位置のz成分がr(3k+2)である。速度はv(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での速度x成分がv(3k)、速度y成分がv(3k+1)、速度z成分がv(3k+2)である。
衛星位置速度算出部135は、衛星位置・速度記憶部140に記憶されている位置速度情報の内、算出した時刻TOE2−3日より以前の情報を保存領域から削除する。ステップS3終了後、ステップS4に進む。
【0035】
(ステップS4)衛星位置速度算出部135は、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されているか否かを判別する。
衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合(ステップS4;Yes)、ステップS5に進む。衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合(ステップS4;No)、ステップS7に進む。なお、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていない状態は、例えば、GPS衛星2が測位装置1から見て遮蔽されていて、エフェメリス・データを受信できない場合、測位装置1の電源がオフ状態などである。
【0036】
(ステップS5)衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合、衛星位置速度算出部135は、TOE2の位置速度情報を削除後、衛星位置・速度記憶部140の保存領域の空きが、2個分の位置速度情報を記憶できる領域になるまで位置速度情報を削除する。衛星位置速度算出部135は、経過時間の古いものから、2n時間(nは1以上の自然数)毎の隣り合う情報の内、新しい時刻の情報を削除する。なお、経過時間とは、衛星位置・速度記憶部140に1つも記憶されていない状態から位置速度情報の記憶を開始してからの時間の経過であり、図3における縦軸に示した時間である。
具体的には、2時間毎の隣り合う情報の内、新しい時刻の情報を削除する。2時間毎の隣り合う情報を比較して、情報を削除しても、空き領域を確保できない場合は、4時間毎に隣り合う情報の内、新しい方の情報を削除する。空き領域を確保できない場合、衛星位置速度算出部135は、6時間毎に隣り合う情報について比較、削除を行う。空き領域を確保できない場合、衛星位置速度算出部135は、8時間毎に隣り合う情報について比較、削除を行う。ステップS5終了後、ステップS6に進む。
【0037】
(ステップS6)次に、衛星位置速度算出部135は、時刻TOE2と時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出する。次に、衛星位置速度算出部135は、算出した2つの時刻の各位置速度情報を衛星位置・速度記憶部140に記憶させる。なお、記憶されるGPS衛星2の位置と速度はECEF(地球中心・地球固定)座標系である。ステップS6終了後、ステップS1に戻る。
【0038】
(ステップS7)衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合、衛星位置速度算出部135は、衛星位置・速度記憶部140の保存領域の空きが、3個分の位置速度情報を記憶できる領域になるまで位置速度情報を削除する。衛星位置速度算出部135は、経過時間の古いものから、2n(nは1以上の自然数)時間毎の隣り合う情報の内、新しい時刻の情報を削除する。
具体的には、2時間毎の隣り合う情報を比較して、情報を削除しても、空き領域を確保できない場合は、4時間毎に隣り合う情報の内、新しい方の情報を削除する。空き領域を確保できない場合、衛星位置速度算出部135は、6時間毎に隣り合う情報について比較、削除を行う。空き領域を確保できない場合、衛星位置速度算出部135は、8時間毎に隣り合う情報について比較、削除を行う。ステップS7終了後、ステップS8に進む。
【0039】
(ステップS8)次に、衛星位置速度算出部135は、時刻TOE2、時刻TOE2−2時間、及び時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出する。次に、衛星位置速度算出部135は、算出した3つの時刻の各位置速度情報を衛星位置・速度記憶部140に記憶させる。ステップS8終了後、ステップS1に戻る。
【0040】
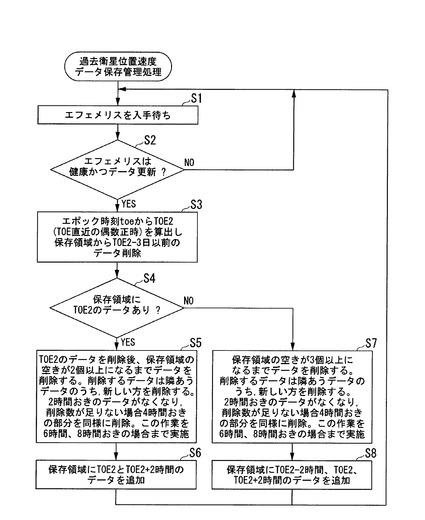
次に、衛星位置・速度記憶部140に記憶される位置速度情報の順番と、削除される順番の具体的な例について、図3を用いて説明する。図3は、本実施形態に係る衛星位置・速度記憶部140に記憶される位置速度情報と、削除される位置速度情報の一例を説明する図である。図3において、横軸は保存回数、縦軸は経過時間である。なお、経過時間において、2時間毎のデータであり、「2」は4時間を表している。また、保存回数とは、エフェメリス・データから、GPS衛星2の位置と速度を計算し、衛星位置・速度記憶部140へ位置速度情報を保存した回数である。経過時間は、保存開始の時刻から各保存された情報の時刻までの経過時間である。
【0041】
まず、保存回数1では、まだ時刻TOE2の位置速度情報が衛星位置・速度記憶部140に記憶されていない。このため、図3に示すように、衛星位置速度算出部135は、経過時間0、1(2時間後)、及び2(4時間後)の位置速度情報を衛星位置・速度記憶部140に記憶する。この場合、衛星位置速度算出部135は、ステップS8で説明したように、時刻TOE2(g2)と、時刻TOE2−2時間(g1)、及び時刻TOE2+2時間(g3)の3つの位置速度情報を衛星位置・速度記憶部140に記憶する。
保存回数2において、ステップS6で説明したように、衛星位置速度算出部135は、2つの位置速度情報が衛星位置・速度記憶部140に記憶する。この場合、衛星位置速度算出部135は、この時点で最新の位置速度情報である位置速度情報g3を削除した後、時刻TOE2の位置速度情報を位置速度情報g3’として衛星位置・速度記憶部140に記憶させる。位置速度情報g3を削除する理由は、保存回数2における時刻TOE2時間は、保存回数1における時刻TOE2+2時間であるためである。そして、衛星位置速度算出部135は、時刻TOE2+2時間の位置速度情報を位置速度情報g4として記憶させる。
同様に、保存回数3において、衛星位置速度算出部135は、位置速度情報g4を削除した後、時刻TOE2の位置速度情報を位置速度情報g4’として記憶させる。そして、時刻TOE2+2時間の位置速度情報を、位置速度情報g5として記憶する。
【0042】
経過時間4から10の期間、記憶されている情報がないのは、エフェメリス・データを軌道予測装置10が取得できなかったことを表している。
保存回数4において、保存回数4における時刻TOE2から直近の偶数正時、すなわち経過時間10(20時間)にGPS衛星2の位置と速度情報が衛星位置・速度記憶部140に記憶されていないため、ステップS8のように、衛星位置速度算出部135は、再び3つの時刻の位置速度情報を衛星位置・速度記憶部140に記憶させる。このような動作を繰り返していくと、保存回数6で、衛星位置・速度記憶部140に保存される位置速度情報が10個になる。
【0043】
保存回数6に達した後の衛星位置・速度記憶部140に記憶されている位置速度情報を、便宜的にg11〜g20とする。
保存回数7において、ステップS5で説明したように、衛星位置速度算出部135は、2つの位置速度情報分の記憶領域を確保する。このため、まず、保存回数6までと同様に、衛星位置速度算出部135は、保存回数6で保存された位置速度情報g20を削除する。次に、衛星位置速度算出部135は、位置速度情報を2つ書き込める領域が確保できるまで、衛星位置・速度記憶部140に保存されている位置速度情報を削除する。
具体的には、衛星位置速度算出部135は、経過時間が一番古い2時間間隔のペアの位置速度情報g11とg12を比較する。位置速度情報g11は、保存回数1で記憶された位置速度情報g1であるので、保存回数1における時刻TOE2−2時間の位置速度情報である。位置速度情報g12は、保存回数1で記憶された位置速度情報g1であり、保存回数1における時刻TOE2の位置速度情報である。位置速度情報g12の方が新しい情報であるので、衛星位置速度算出部135は、位置速度情報g12を削除する。このようにして、衛星位置速度算出部135は、2つの空き領域を確保する。
次に、衛星位置速度算出部135は、衛星位置・速度記憶部140に、時刻TOE2時間の位置速度情報を新たな位置速度情報g20として記憶させ、時刻TOE2+2時間の位置速度情報をg21として記憶させる。
【0044】
なお、本実施形態では、ステップS5及び保存回数7において、2つの位置速度情報を削除した後に、時刻TOEの位置速度情報と時刻TOE+2時間の位置速度情報を衛星位置・速度記憶部140に記憶させる例を説明した。しかしながら、1つの位置速度情報を削除した後に、時刻TOE+2時間の位置速度情報を記憶させ、時刻TOEの位置速度情報と上書きするようにしてもよい。具体的には、保存回数7において衛星位置速度算出部135は、位置速度情報g11とg12を比較する。衛星位置速度算出部135は、比較結果に基づき、時刻の新しい方の位置速度情報g12を削除する。
次に、衛星位置速度算出部14は、時刻TOE2時間の位置速度情報を、位置速度情報g20に上書きし、時刻TOE2+2時間の位置速度情報をg21として記憶させるようにしてもよい。
【0045】
このように、衛星位置速度算出部135は、衛星位置・速度記憶部140の位置速度情報に対して削除と追加を繰り返す。
保存回数13において、衛星位置・速度記憶部140に記憶されている位置速度情報を、便宜上g21〜g30とする。
保存回数14において、時刻TOE2の位置速度情報が衛星位置・速度記憶部140に記憶されていないため、3つの位置速度情報を削除する必要がある。この場合、衛星位置速度算出部135は、まず、経過時間が一番古い2時間間隔のペアの位置速度情報g28とg29を比較し、比較結果に基づき、位置速度情報g29を削除する。次に、衛星位置速度算出部135は、経過時間が一番古い4時間間隔のペアの位置速度情報g24とg25を比較し、比較結果に基づき、位置速度情報g25を削除する。次に、衛星位置速度算出部135は、経過時間が二番古い4時間間隔のペアの位置速度情報g26とg27を比較し、比較結果に基づき、位置速度情報g27を削除する。
以上の処理により、保存回数13で保存されていた位置速度情報から3個の位置速度情報の削除を完了する。
また、保存回数15回において、衛星位置速度算出部135は、経過時間0の情報が、ステップS3で説明した時刻TOE2−3日の位置速度情報であるため削除する。
【0046】
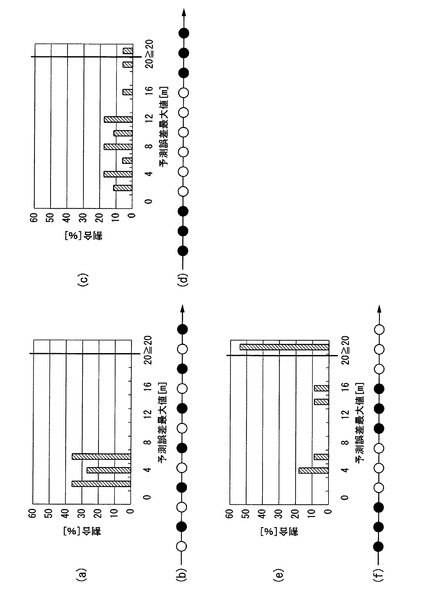
次に、このように、衛星位置・速度記憶部140に記憶されている位置速度情報を、間引きながら保存する理由について説明する。図4は、保存間隔毎の予測誤差の一例を説明する図である。図4(a)と図4(b)は、位置速度情報を4時間毎、均等に3日間分取得した例である。図4(c)と図4(d)は、位置速度情報を3日間分の内、前後にのみ取取得し、3日に渡って中抜けした例である。図4(e)と図4(f)は、位置速度情報を3日の内、2日間に渡って中抜けした例である。
図4(a)、図4(c)及び図4(e)において、横軸は予測誤差の最大値を表し、縦軸はその割合を表している。図4(b)、図(d)及び図(f)において、横軸は時間を表し、白丸は位置速度情報を取得できなかった「中抜け」状態を表し、黒丸は位置速度情報を取得できた状態を表している。
4時間間隔の場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(a)に示すように、予測誤差の最大値は7[m]以下である。中抜けが3日に渡る場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(c)に示すように、予測誤差の最大値は20[m]以上もあり、その割合もランダムである。中抜けが2日に渡る場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(e)に示すように、予測誤差の最大値は20[m]以上が50%もある。
このように、予測誤差を抑えるには、中抜けの期間が長い状態は好ましくなく、位置速度情報が均等に保存されていることが好ましい。
【0047】
このため、本実施形態では、単に10個の位置速度情報を時系列に記憶させているのではなく、限られた記憶容量内で3日分の位置速度情報を時間間隔が均等に記憶するように、保存した位置速度情報を削除して、新たな位置速度情報を記録するようにした。この結果、予測誤差を抑えることができるので、精度良く軌道予測を行うことができる。
【0048】
次に、軌道予測を行う処理手順について、図5を用いて説明する。図5は、本実施形態に係る軌道予測を行う処理手順のフローチャートである。
【0049】
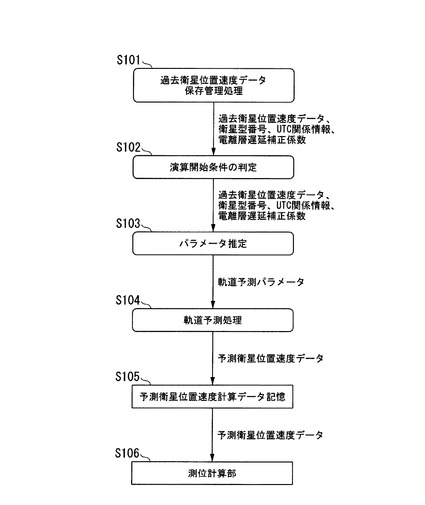
(ステップS101)軌道予測装置10は、ステップS1〜S8の過去の位置速度情報を記憶させる処理を行う。
ここで、エポック時刻toeに近い偶数正時TOE2を時刻t(k)(k=0,・・・,n−1)と表現する。以降の処理上、位置はr(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での位置のx成分がr(3k)、位置のy成分がr(3k+1)、位置のz成分がr(3k+2)である。速度はv(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での速度x成分がv(3k)、速度y成分がv(3k+1)、速度z成分がv(3k+2)である。
ステップS101終了後、ステップS102に進む。
【0050】
(ステップS102)演算開始判定部145は、衛星位置・速度記憶部140から過去の位置速度情報、衛星型番号を読み出し、記憶部115から電離層遅延補正係数、GPS時刻、及びUTC関係情報を読み出す。演算開始判定部145は、読み出した情報に基づき、演算開始条件を満たしているか否かを判定する。演算開始条件とは、以下の5つである。
1.過去の位置速度情報が9個以上記憶されていること
2.記憶部115に記憶されている衛星型番号が有効で、衛星型がBLOCK IIA、BLOCK IIR、BLOCK IIR−Mであること
3.軌道予測が未完了であること
4.RTC(実時間のクロック)の補正が完了していること
5.アルマナック・データが有効であること
演算開始条件を満たしていないと判別した場合、ステップS101に戻る。
演算開始条件を満たしていると判別した場合、演算開始判定部145は、パラメータ推定部150に読み出した情報と判定結果を出力する。
ステップS102終了後、ステップS103に進む。
【0051】
(ステップS103)パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、以下の11個の成分を有するベクトルである推定パラメータsを推定する。
成分1 s(0);時刻t(0)での衛星位置のx成分(初期値r(0))
成分2 s(1);時刻t(0)での衛星位置のy成分(初期値r(1))
成分3 s(2);時刻t(0)での衛星位置のz成分(初期値r(2))
成分4 s(3);時刻t(0)での衛星速度のx成分(初期値v(0))
成分5 s(4);時刻t(0)での衛星速度のy成分(初期値v(1))
成分6 s(5);時刻t(0)での衛星速度のz成分(初期値v(2))
成分7 s(6);太陽輻射圧パラメータのワイバイアス(Y−bias)(初期値0)
成分8 s(7);太陽輻射圧パラメータのスケールファクタ(scale Factor)(初期値1)
成分9 s(8);地球自転パラメータの極運動x方向(初期値0)
成分10 s(9);地球自転パラメータの極運動y方向(初期値0)
成分11 s(10);地球自転パラメータの地球自転速度変化(初期値0)
パラメータ推定部150は、推定した推定パラメータを軌道予測演算部155に出力する。ステップS103終了後、ステップS104に進む。なお、ワイバイアスとは、軌道におけるGPS衛星2の太陽パネル(ソーラーパネル)の梁方向(Beam Directions)であるy軸に対するバイアス成分であり、スケールファクタとは、スケール係数である。太陽輻射圧、ワイバイアス及びスケースファクタについては、例えば、非特許文献1(” New Empirically Derived Solar Radiation Pressure Model for Global Positioning System Satellites”, Y.Bar-Sever and D.Kuang, IPN Progress Report 42-159, Nov 15, 2004)参照。
【0052】
(ステップS104)軌道予測演算部155は、パラメータ推定部150が出力する推定パラメータsを使用し、後述するように、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。ステップS104終了後、ステップS105に進む。
【0053】
(ステップS105)軌道予測演算部155は、算出した予測軌道値を予測結果記憶部160に記憶させる。ステップS105終了後、ステップS106に進む。
【0054】
(ステップS106)測位算出部20は、予測結果記憶部160から予測軌道値を読み出し、読み出した予測軌道値を外挿し衛星位置を算出し、公知の手法で測位を行う。
【0055】
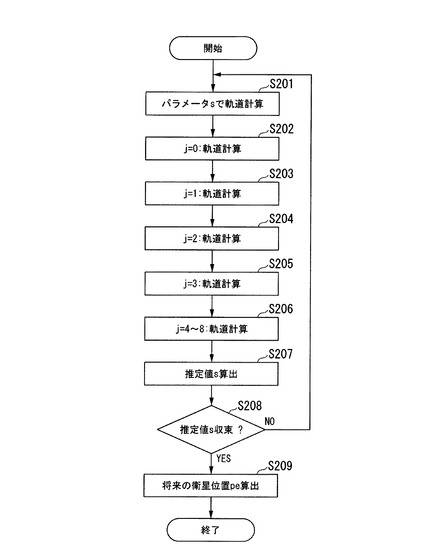
次に、ステップS103〜S104で行う衛星位置p0(i)の軌道計算の方法について、図6を用いて説明する。図6は、本実施形態に係る衛星位置p0(i)の軌道計算の処理手順のフローチャートである。
(ステップS201)まず、パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、推定パラメータsで軌道計算する(ステップS103)。
時刻t(0)での軌道における衛星位置において、半径方向、進行方向、軌道面垂直方向の各単位ベクトルd1、d2、d3は、次式(2)〜(4)のように表される。
【0056】
【数2】
【0057】
【数3】
【0058】
【数4】
【0059】
なお、式(2)において、r(0)、r(1)、r(2)はGPS衛星2の位置を表し、√((r(0))2+(r(1))2+(r(2))2)は地球からGPS衛星2との距離を表している。
【0060】
(ステップS202)パラメータ推定部150は、最小二乗法による推定を行うために、推定パラメータの値をΔsずらす。パラメータ推定部150は、j=0に対して推定パラメータのs(0),s(1),s(2)をs(0)+d1(0)Δs(0),s(1)+d1(1)Δs(0),s(2)+d1(2)Δs(0)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。
【0061】
A(i,0)=(p(i)−p0(i))/Δs(0) ・・・(5)
【0062】
式(5)において、p0(i)は、Δs(0)ずらす前のGPS衛星2の位置であり、p(i)は、Δs(0)ずらした後のGPS衛星2の位置である。このため、式(5)において、行列Aは、各パラメータをΔs(0)ずらした時に、GPS衛星2の位置がどれだけずれたかの変化量である偏微分値の行列を表している。また、ステップS202の計算は、GPS衛星2の位置を半径方向d1にΔs(0)ずらした衛星位置の計算を行っている。また、位置をずらす量Δs(0)は、予め定められている量を用いる。そして、Δs(0)は、例えば、実験により算出する。この場合、パラメータ推定部150での桁落ちを考慮し、sの値に応じて、Δsjを設定するようにしてもよい。
【0063】
(ステップS203)軌道予測演算部155は、j=1に対して推定パラメータのs(0),s(1),s(2)をs(0)+d3(0)Δs(1),s(1)+d3(1)Δs(1),s(2)+d3(2)Δs(1)に代え、時刻t(k)でのGPS衛星2の位置p(i)を軌道計算する。また、ステップS203の計算は、GPS衛星2の位置を垂直方向d3にΔs(1)ずらしたGPS衛星2の位置の計算を行っている。
【0064】
A(i,1)=(p(i)−p0(i))/Δs(1) ・・・(6)
【0065】
(ステップS204)パラメータ推定部150は、j=2に対して推定パラメータのs(3),s(4),s(5)をs(3)+d1(0)Δs(2),s(4)+d1(1)Δs(2),s(5)+d1(2)Δs(2)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。また、ステップS204の計算は、GPS衛星2の位置を半径方向d1にΔs(2)ずらした位置の計算を行っている。
【0066】
A(i,2)=(p(i)−p0(i))/Δs(2) ・・・(7)
【0067】
(ステップS205)パラメータ推定部150は、j=3に対して推定パラメータのs(3),s(4),s(5)をs(3)+d2(0)Δs(3),s(4)+d2(1)Δs(3),s(5)+d2(2)Δs(3)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。また、ステップS205の計算は、GPS衛星2の位置を進行方向d2にΔs(3)ずらした位置の計算を行っている。
【0068】
A(i,3)=(p(i)−p0(i))/Δs(3) ・・・(8)
【0069】
すなわち、本実施形態では、GPS衛星2の位置の半径方向と垂直方向、GPS衛星2の速度の半径方向と進行方向の計4つのパラメータを推定する。なお、ステップS202とS203において、半径方向と垂直方向にのみずらし、進行方向にずらした場合の位置の計算を行わない理由は、進行方向にずらしても、将来のGPS衛星2の位置への影響が少ないためである。すなわち、地球からの重力の位置への変化量の影響が少ないため、進行方向は推定しない。同様に、ステップS204とS205において、半径方向と進行方向にのみずらし、垂直方向にずらした場合の位置の計算を行わない理由は、垂直方向にずらしてもGPS衛星2の速度への影響が少ないためである。すなわち、地球からの重力の加速度への変化量の影響が少ないため、進行方向は推定しない。
【0070】
(ステップS206)パラメータ推定部150は、j=4,・・・,8(成分7〜11の太陽輻射圧と地球自転との5つパラメータ)に対して推定パラメータの1つの成分s(j+2)をs(j+2)+Δs(j)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。
【0071】
A(i,j)=(p(i)−p0(i))/Δs(j) ・・・(9)
【0072】
ただし、式(5)〜式(7)において、i=0,・・・,3n−1であり、式(9)において、j=4,・・・,8である。
【0073】
(ステップS207)パラメータ推定部150は、次式(10)を用いて、最小二乗法により推定パラメータsを算出する。
【0074】
s=s+B(A×AT)−1×AT(r−p0) ・・・(10)
【0075】
式(10)において、Tは転置行列を表し、rはエフェメリス・データから求めたGPS衛星2の位置を表し、p0は、推定パラメータから軌道計算したGPS衛星2の位置を表し、「−1」は逆行列を表している。推定したGPS衛星2のずれは、推定パラメータのずれによるものである。このため、パラメータ推定部150は、推定パラメータのずれ量を式(5)〜(9)で求めて更新する。
また、式(10)において、Tは転置行列を表し、行列Bは、次式(11)である。なお、行列Aは、GPS衛星2の位置の半径方向と垂直方向の成分、GPS衛星2の速度の半径方向と進行方向の成分である。行列Bは、この行列Aの成分を、元のxyz方向の成分に座標系を変換する役割をしている。
【0076】
【数5】
【0077】
(ステップS208)パラメータ推定部150は、推定パラメータsが収束したか否かを判別する。例えば、ステップS201〜S208を繰り返すことで、Δs変化させても、予め定められている範囲内のずれしか発生しなくなった場合、収束したとする。
推定パラメータsが収束したと判別した場合(ステップS208;Yes)、ステップS209に進む。推定パラメータの1つの成分sが収束していないと判別した場合(ステップS208;No)、ステップS201に戻る。
(ステップS209)軌道予測演算部155は、この推定パラメータの1つの成分sを使用し、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。
【0078】
次に、パラメータ推定部150および軌道予測演算部155が行う軌道計算の例について説明する。
(手順1)推定パラメータsの最初の6個のパラメータ衛星位置速度をECEF座標系
からECI(地心慣性;Earth Centered Inertial)座標系に変換する。
(手順2)GPS時刻をUTC時刻に変換する。
(手順3)GPS衛星2に加わる力(地球からの重力、月からの重力、太陽からの重力、太陽輻射圧)を計算する。
(手順4)GPS衛星2に加わる力を加速度に変換し数値積分し、将来のGPS衛星2の位置と速度を算出する。用いる数値積分法は、例えば、RKF45及びCowellである。座標系、時刻系、衛星に加わる太陽輻射圧以外の力、数値積分については、例えば、非特許文献2(‘’Satellite Orbits, Models, Methods and Application’’, O.Montenbruck and E.Gill, Springer,2005)の2章「Introductory Astrodynamics」、3章「Force Model」、4章「Numerical Integration」、5章「Time and Reference Systems」、及び8章の「Orbit Determination and Parameter Estimation」参照。
(手順5)算出したGPS衛星2の位置と速度をECI座標系からECEF座標系に変換する。
【0079】
このように算出された位置速度情報、及び実測により取得された位置速度情報、UTC関係情報、GPS時刻、電離層遅延補正係数を用いて、測位算出部20は、公知の手法で位置測定を行う。
【0080】
なお、従来行われている軌道予測処理は、例えば以下である。
(手順101)本実施形態と同様に、従来の軌道予測装置は、各種の情報をGPS衛星2から受信する。
(手順102)従来の軌道予測速装置は、本実施形態と同様に11個の成分を有するベクトルである推定パラメータsを推定する。
(手順103)従来の軌道予測装置は、最小二乗法による予測推定を行うために、推定パラメータの値をΔsずらす。従来の軌道予測装置は、推定パラメータsの1つの成分s(j)をs(j)+Δs(j)に代え、時刻t(k)(k=0,・・・,n−1)での衛星位置p(i)(i=0,・・・,3n−1)を軌道計算する。なお、iは、GPS衛星2の位置の何番目がずれるのかを表している。jは、0から10であり、どのパラメータをずらしたかを表している。
【0081】
A(i,j)=(p(i)−p0(i))/Δs(j) ・・・(12)
【0082】
式(12)において、p0(i)は、Δs(j)ずらす前のGPS衛星2の位置であり、p(i)は、Δs(j)ずらした後のGPS衛星2の位置である。
(手順104)従来の軌道予測装置は、式(12)で求めた誤差量を用いて、次式(13)を用いて、推定パラメータsを算出する。
【0083】
s=s+(A×AT)−1×AT(r−p0) ・・・(13)
【0084】
式(13)において、Tは転置行列を表し、rはエフェメリス・データから求めたGPS衛星2の位置を表し、p0は、推定パラメータから軌道計算したGPS衛星2の位置を表し、「−1」は逆行列を表している。推定したGPS衛星2の位置に対するずれは、推定パラメータのずれによるものであるため、推定パラメータのずれ量を式(12)で求めて更新する。
従来の軌道予測装置は、推定パラメータsが収束するまで、手順102から104を繰り返す。従来の軌道予測装置は、このように算出された推定パラメータsを用いて将来のGPS衛星2の位置peを軌道計算していた。
また、従来技術では、位置と速度について、衛星位置の半径方向と進行方向及び垂直方向、衛星速度の半径方向と進行方向及び垂直方向の計6つのパラメータについて推測していた。
【0085】
一方、本実施形態では、上述したように、推定パラメータsの算出において、半径方向と垂直方向に対してΔsずらして衛星の位置の推定し、半径方向と進行方向に対してΔsずらして衛星の速度の推定を行うようにした。このように、本実施形態では、11個の成分の内、9つのパラメータを推定するようにしたので、従来技術の11個のパラメータを推定する場合と比較して推測にかかる演算コストを下げることができる。すなわち、パラメータ数を減らしたので、最小二乗法を行う行列を小さくできるため、演算に要する記憶部の容量を小さくでき、さらに演算に係る時間を短くできる。このように推定するパラメータを削減しても、従来技術と同等に、精度良く軌道予測を行うことができる。
【0086】
以上のように、本実施形態の軌道予測装置10は、エフェメリス・データから算出した位置速度情報を、時間間隔が均等になるように衛星位置・速度記憶部140に記憶させる。また、軌道予測装置10は、衛星位置・速度記憶部140に記憶されている位置速度情報が、予め定めた個数以上の場合、時間間隔が均等になるように衛星位置・速度記憶部140から位置速度情報を削除する。このように均等に記憶された位置速度情報を用いて、軌道予測を行うので、従来技術と比較して、予測誤差を小さくできる効果がある。
また、推定パラメータの内、GPS衛星2の位置の進行方向、GPS衛星2の速度の垂直方向の計2つのパラメータについて推定しないようにした。このため、最小二乗法で用いる行列を従来技術より小さくできるので、推定に必要なメモリ容量を削減できる。また、最小二乗法で用いる行列を小さくできるので、演算に係る時間を短くできる効果もある。このため、軌道予測装置10のコストを下げることができ、さらに演算時間を短くできるため、起動後に従来技術より短時間で測位を開始できる。この結果、利用者にとって利便性が増すので、使用頻度を増す効果もある。
【0087】
また、本実施形態の軌道予測装置10は、衛星位置の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルd1とd2及びd3を用いて衛星の位置と速度との各偏微分値である行列Aを算出し、算出した行列Aを元のxyz方向の成分に座標系を変換する行列Bを用いて推定パラメータを算出するようにした。このため、本実施形態の軌道予測装置10は、推定に使用するパラメータを従来技術より削減でき、未知数が少なくなるので、推定に必要な観測方程式も削減できる。この結果、本実施形態の軌道予測装置10は、従来技術と比較して少ないエフェメリス・データで軌道予測を行えるので、軌道予測に要する時間を削減することができる。この結果、起動後に従来技術より短時間で位置測位を開始できるので、利用者にとって利便性が増すので、使用頻度を増す効果もある。
例えば、一般的なGPS受信装置では、電源オフ状態から電源オン状態になった後、エフェメリス・データの取得を開始する。そして、エフェメリス・データ取得後、パラメータの推定及び軌道推定を開始する。パラメータの推定にかかる時間が長い場合、推定途中で測位装置の電源をオフ状態にされてしまうと、それまでの演算結果が無効なままである。このため、電源オン状態になった後、再度、エフェメリス・データの取得からやり直す必要が生じる場合があった。
一方、本実施形態の軌道予測装置10は、軌道推定にかかる時間が短いため、利用者が電源をオフ状態にする前に推定を完了し、推定結果をGPS受信部内の記憶部に記憶させておくことが可能になる。そして、このように記憶された推定結果を、電源オフ状態からオン状態になった場合に用いて推定を行えるので、本実施形態の軌道予測装置10は、電源オン状態後に位置測位開始までの時間を短縮できる。
また、従来技術と同数のエフェメリス・データを用いて軌道予測を行った場合、推定に用いるパラメータの数を削減したため、観測方程式の数に対して推定パラメータの数が減ったため、パラメータ間の共分散が減少し,精度の良いパラメータ値を推定できる。この結果、本実施形態の軌道予測装置10は、推定精度を改善することができる。なお、推定しないパラメータに関しては、実測により、軌道予測に十分な精度のデータであることを確認している。
【0088】
[第2実施形態]
第1実施形態では、推定パラメータの内、9つのパラメータを推定する例を説明した。本実施形態では、第1実施形態で用いた9個の成分のうち、さらに、太陽輻射圧パラメータのワイバイアスとスケールファクタの2つを推定せず、7個の成分のベクトルによる推定パラメータsを推定する例を説明する。
なお、太陽輻射圧パラメータのワイバイアスとスケールファクタは、GPS衛星2毎に固有の固定値を、予めGPS衛星2毎に算出して軌道予測装置10内のいずれかの記憶部か機能部に、予め記憶させておく。例えば、所定の期間のデータを算出して、平均値を記憶させるようにしてもよい。
【0089】
次に、過去のGPS衛星2の位置と速度データを記憶させる処理について、図2、図5及び図6を用いて説明する。
GPS衛星2の位置と速度情報の記憶と削除は、第1実施形態と同様に行う(図2、ステップS1〜S8)。
第1実施形態と異なるのは、衛星位置p0(i)の軌道計算の方法である。
(ステップS201’)軌道予測演算部155は、推定パラメータsを使用し、時刻t(k)での衛星位置p0(i)(i、・・・、3n−1)を軌道計算する。
推定パラメータsは、以下の9個の成分のベクトルである。
成分1 s(0);時刻t(0)での衛星位置のx成分(初期値r(0))
成分2 s(1);時刻t(0)での衛星位置のy成分(初期値r(1))
成分3 s(2);時刻t(0)での衛星位置のz成分(初期値r(2))
成分4 s(3);時刻t(0)での衛星速度のx成分(初期値v(0))
成分5 s(4);時刻t(0)での衛星速度のy成分(初期値v(1))
成分6 s(5);時刻t(0)での衛星速度のz成分(初期値v(2))
成分7 s(6);地球自転パラメータの極運動x方向(初期値0)
成分8 s(7);地球自転パラメータの極運動y方向(初期値0)
成分9 s(8);地球自転パラメータの地球自転速度変化(初期値0)
【0090】
時刻t(0)での衛星位置において、半径方向、進行方向、軌道面垂直方向の各単位ベクトルd1、d2、d3は、第1実施形態と同様に式(2)〜(4)のように表される。
【0091】
ステップS202〜ステップS205は、第1実施形態と同様に行う。
(ステップS206’)軌道予測演算部155は、j=4,5,6に対して推定パラメータの1つの成分s(j+2)をs(j+2)+Δs(j)に代え、時刻t(k)での衛星位置p(i)を式(9)のように軌道計算する。ただし、式(9)おいて、j=4,5,6である。
【0092】
(ステップS207’)軌道予測演算部155は、次式(14)を用いて、推定パラメータsを算出する。
【0093】
s=s+B(A×AT)−1×AT(r−p0) ・・・(14)
【0094】
式(14)は、右辺の演算を実行して、演算結果を新たなsとして更新することを表している。なお、式(14)において、Tは転置行列を表し、行列Bは、次式(15)である。また、行列Bは、行列Aの成分を、元のxyz方向の成分に座標系を変換する役割をしている。
【0095】
【数6】
【0096】
(ステップS208)軌道予測演算部155は、推定パラメータsが収束したか否かを判別する。
推定パラメータsが収束したと判別した場合(ステップS208;Yes)、ステップS209に進む。推定パラメータの1つの成分sが収束していないと判別した場合(ステップS208;No)、ステップS201’に戻る。
(ステップS209)軌道予測演算部155は、この推定パラメータの1つの成分sを使用し、将来の衛星位置peを軌道計算する。
軌道予測演算部155は、第1実施形態と同様に軌道計算を行う。
【0097】
以上のように、第2実施形態によれば、第1実施形態と比較して、推定パラメータの成分の内、2つについて固定値を用いたため、パラメータを推定する際に最小二乗法で用いる行列が小さくなる。このように最小二乗法で用いる行列を小さくできた結果、本実施形態の軌道予測装置10では、演算に用いる必要メモリの容量が小さくて済み、さらに演算時間を短くできる効果がある。演算に必要なメモリ容量を少なくすることができたので、本実施形態の軌道予測装置10を用いた測位装置1では、コストダウンを実現できる。また、演算時間を短くできることにより、測位装置1の電源をオフ状態からオン状態にしたような場合、従来技術より早く起動後に位置測定を開始できるので、本実施形態の軌道予測装置10では、利用者にとって利便性が増すため、利用者の使用頻度が向上する効果もある。
また、第2実施形態によれば、第1実施形態と比較して、さらに推定パラメータにおける未知数が少なくなるので、本実施形態の軌道予測装置10では、必要な観測方程式の数を減らせる効果もある。この結果、少数のエフェメリス・データを用いて、軌道予測を行うことが可能になるので、従来技術と比較して、本実施形態の軌道予測装置10では、利用者にとって利便性が増すため、利用者の使用頻度が向上する効果もある。
【0098】
なお、本実施形態では、3日分の位置速度情報を衛星位置・速度記憶部140に記憶させる例を説明したが、本実施形態の軌道予測装置10を用いる測位装置1の使用目的に応じて、記憶させる期間を3日より多くしても3日より少なくしてもよい。また、エフェメリス・データを記憶するタイミングとして2時間間隔の例を説明したが、測位装置1の用途に応じて、エフェメリス取得部130は、GPS衛星2から送信されたエフェメリス・データを2時間毎に受信し、受信した後に、4時間間隔に記憶させるようにして間引くようにしてもいい。また、衛星位置・速度記憶部140に記憶させる位置速度情報が10個の例を説明したが、測位装置1の用途に応じて、10個以上であってもよい。
【符号の説明】
【0099】
1・・・測位装置、2・・・GPS衛星、10・・・軌道予測装置、20・・・測位算出部、110・・・情報取得部、115・・・記憶部、120・・・アルマナック取得部、125・・・衛星型抽出部、130・・・エフェメリス取得部、135・・・衛星位置速度算出部、140・・・衛星位置・速度記憶部、145・・・演算開始判定部、150・・・パラメータ推定部、155・・・軌道予測演算部、160・・・予測結果記憶部
【技術分野】
【0001】
本発明は、軌道予測装置、及び軌道予測方法に関する。
【背景技術】
【0002】
GPS(Global Positioning System)は、位置測定、測量などに用いられている。地球上空の6つの軌道を24機以上のGPS衛星が周回し、各GPS衛星は、アルマナック(Almanac)データとエフェメリス(Ephemeris)データの二種類の軌道情報を含む航法メッセージを送信している。
カーナビゲーション装置などのGPS受信機は、この航法メッセージを用いてGPS衛星からGPS受信機までの信号到達時間を測定する。そしてGPS受信機は、信号到達時間に光速を掛けることでGPS衛星とGPS受信機間の距離(擬似距離)を求めている。この作業を4機以上の衛星に対して行うことで、受信機の位置を三次元上で算出している。アルマナック・データは、軌道上における全ての衛星に関する軌道情報であり、1日に1回、データが更新される。エフェメリス・データには、各衛星の正確な位置情報と信号を発射した時刻情報が含まれており、2時間毎にデータが更新される。
【0003】
GPS受信機は、受信した各情報を自機の記憶部に、例えば電源を切る前に受信したアルマナック・データとエフェメリス・データを保存している。これらの情報には、各々有効期限がある。GPS受信機の電源がオン状態で、GPS衛星からの送信情報を送信毎に受信できていない場合など、GPS受信機は、再度、送信情報を受信する必要がある。
アルマナック・データの再受信に要する時間は、例えば12分30秒であり、エフェメリス・データの再受信に要する時間は、30秒である。
どちらかのデータの有効期限が切れにより再受信している期間、GPS受信機は、位置測定を行えない。このため、エフェメリス・データの有効期限が切れた場合、GPS受信機は、以前受信したエフェメリス・データを用いて、現在のGPS衛星の位置を予測し、現在のエフェメリス・データが利用できない場合に現在のGPS衛星の状態を使用して位置測定を行うことが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第7839330号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の従来技術では、測位を行う際に用いる推定パラメータの個数が多いため、演算にかかるコストが高いという課題があった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであって、演算にかかるコストを削減できる軌道予測装置、及び軌道予測方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明に係る軌道予測装置は、測位衛星からの信号を受信して受信データを取得する情報取得部と、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、を備えることを特徴としている。
【0008】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星の半径方向と進行方向及び軌道面垂直方向との成分による座標系に変換する行列を用いて前記推定パラメータを推定するようにしてもよい。
【0009】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星の位置の進行方向成分に対して予め算出された値を用い、前記測位衛星の速度の軌道面垂直方向成分に対して予め算出された値を用い、前記推定パラメータを推定するようにしてもよい。
【0010】
また、本発明の軌道予測装置において、前記推定パラメータ部は、前記測位衛星に対する太陽輻射圧のワイバイアスとスケール係数とに対して各々予め算出した値を用い、前記推定パラメータを推定するようにしてもよい。
【0011】
上記目的を達成するため、本発明は、軌道予測装置における軌道予測方法であって、情報取得部が、測位衛星からの信号を受信して受信データを取得する情報取得過程と、衛星位置速度算出部が、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出過程と、推定パラメータ部が、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽輻射圧の影響を示す値及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ過程と、軌道予測部が、前記推定パラメータ手順で推定された前記推定パラメータを用いて前記測位衛星の位置を推定する軌道予測過程と、を含むことを特徴としている。
【発明の効果】
【0012】
本発明によれば、軌道における測位衛星の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルと、位置速度情報とを用いて、測位衛星の位置と測位衛星の速度と太陽から測位衛星への光の圧力である太陽輻射圧の影響及び地球自転の影響を含む推定パラメータを算出するようにした。このように測位衛星の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルを用いて推定パラメータを推定するため、推定するパラメータを削減することができる。この結果、最小二乗法で用いる行列を従来技術より小さくできるので、推定に必要なメモリ容量を削減できる。また、最小二乗法で用いる行列を小さくできるので、演算に係る時間を短くできる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態に係る軌道予測装置10の概略ブロック図である。
【図2】同実施形態に係る過去のGPS衛星位置と速度データを記憶させる処理のフローチャートである。
【図3】同実施形態に係る衛星位置・速度記憶部140に記憶される情報と、削除される情報の一例を説明する図である。
【図4】保存間隔毎の予測誤差の一例を説明する図である。
【図5】同実施形態に係る軌道予測を行う処理手順のフローチャートである。
【図6】第2実施形態に係る衛星位置p0(i)の軌道計算の処理手順のフローチャートである。
【発明を実施するための形態】
【0014】
[第1実施形態]
以下、図面を用いて、本発明の実施形態について説明する。
まず、一般的なGPS衛星の軌道予測の概略原理について説明する。
【0015】
地球上空の6つの軌道を24機以上のGPS(Global Positioning System)衛星(以下、衛星という)が周回し、各衛星は、航法メッセージを送信している。航法メッセージは、フレームを単位に送信している。1フレームの送信には、30秒を要する。1フレームは、5組のサブフレームで構成され、サブフレーム1から5が順番に送信される。また、サブフレーム1から3は、各衛星に固有の情報を含み、毎回同じ内容で構成される。サブフレーム4と5は、全衛星が同じ内容の情報で構成され、サブフレーム毎にページ1から25で構成されている。このため、サブフレーム4と5の全ての情報を送信するには、25フレームが必要である。このため、GPS受信機が航法メッセージの全情報を得るには、12分30秒の時間がかかる。サブフレーム1は、各衛星の状態(正常に動作しているか否か)、衛星が送信する衛星のクロック誤差を補正するための係数であるクロック補正係数などにより構成されている。サブフレーム2は、各衛星の軌道情報(エフェメリス(Ephemeris)・データ)1/2で構成されている。サブフレーム3は、各衛星の軌道情報(エフェメリス・データ)2/2で構成されている。サブフレーム4は、GPS受信機が受信する信号が、電離層により遅延する量を補正するための係数である電離層遅延補正係数、GPS時刻とUTC(協定世界時間;Universal Time, Coordinated))との関係を表す情報であるUTC関係情報、全衛星の軌道情報(アルマナック(Almanac)・データ)1/2などで構成されている。サブフレーム5は、全衛星の軌道情報(アルマナック・データ)2/2で構成されている。また、各サブフレームの先頭には、GPS時刻を示す情報が含まれている。なお、GPS時刻とは、1週間を単位として衛星で管理されている時間であり、毎週、日曜日の0時からの経過時間で表される情報である。
【0016】
また、エフェメリス・データは、衛星の位置を計算するために必要な軌道の6要素(昇交点赤経、軌道傾斜角、近地点引数、軌道長半径、離心率、真近点角)のデータ、各補正値、及び軌道のエポック時刻toe(軌道の元期(ephemeris reference time))などにより構成されている。エフェメリス・データは、2時間毎に更新される。また、エフェメリス・データの有効期間は、2時間±2時間である。
アルマナック・データは、各衛星の軌道情報である。また、アルマナック・データは、約1日に1度の頻度で更新されている。また、アルマナック・データの有効期間は、エポック時刻±3日間である。
【0017】
GPS受信機は、受信したこれらのデータを記憶部に記憶する。記憶されているアルマナック・データ及びエフェメリス・データ共に有効な状態から、GPS受信機が測位を開始することをホット・スタートという。また、エフェメリス・データが無効でありアルマナック・データのみ有効な状態から、GPS受信機が測位を開始することをウォーム・スタートという。アルマナック・データ及びエフェメリス・データ共に無効な状態から、GPS受信機が測位を開始することをコールド・スタートという。
そして、ホット・スタートの場合、GPS受信機は、電源投入後に最初の位置情報が出力されるまでの時間は、記憶されているエフェメリス・データを用いて測位できるので数秒程度である。一方、ウォーム・スタートの場合、GPS受信機は、エフェメリス・データを再取得する必要があるので、取得に30秒以上の時間がかかり、さらに取得したエフェメリス・データの検査にも時間がかかる。このため、ウォーム・スタート場合、電源投入後に最初の位置情報が出力されるまでの時間は、30秒以上である。さらに、コールド・スタートの場合、全ての航法メッセージを取得する必要があるので、測位信号の捕獲と航法メッセージの取得に数分〜12分30秒かかる。このため、電源投入後に最初の位置情報が出力されるまでの時間は、数分〜12分30秒以上である。
【0018】
軌道予測とは、以前収集されたエフェメリス・データを利用し、未来の衛星位置を予測する技術である。軌道予測装置は、この予測した衛星位置を測位に用いることで、ウォーム・スタート時にエフェメリス・データの受信完了を待たずに測位開始することができるため、GPS初期位置算出時間(TTFF)を短縮することができる。GPS受信機が衛星からの情報取得後、電源オフ状態の期間が短ければ、以前取得したデータを用いて、衛星の位置を把握でききるため、データの再取得までの時間が短くなる。
そして、軌道予測装置は、エフェメリス・データから計算される衛星位置・速度をバックアップ・メモリに保存する。次に、軌道予測装置は、軌道予測計算に必要なデータが揃い次第、軌道予測パラメータを推定し、推定した軌道予測パラメータを使用して軌道を予測する。次に、軌道予測装置は、予測した軌道をバックアップ・メモリへ保存する。そして、軌道予測装置は、エフェメリス・データが無効の時、バックアップ・メモリに保存された予測した軌道を使用して衛星位置を計算する。
【0019】
衛星の位置は、衛星の初期位置と初期速度が与えられ、衛星にかかる加速度が計算され、積分が行われることで、計算される。衛星にかかる加速度ベクトルasatは、地球重力定数をGMe、地球中心から衛星までの位置ベクトルをrとし、地球重力の地球非球面による加速度ベクトルをa1、太陽重力による加速度ベクトルをa2、月重力による加速度ベクトルをa3、太陽輻射圧による加速度ベクトルをa4とすると、次式(1)のように表される。なお、太陽輻射圧とは、太陽から飛んでくる光子(Photon)がGPS衛星2の表面に衝突して発生する力である。
【0020】
【数1】
【0021】
一般的な軌道予測プログラムでは、式(1)の加速度asatを数値積分により時間積分することで、GPS衛星の位置と速度を算出する。用いる数値積分法は、例えば、RKF45(ルンゲクッタフェールベルグ法;Runge-Kutta-Fehlberg method)及びCowellである。
【0022】
次に、本実施形態に係る軌道予測装置の構成について、図1を用いて説明する。図1は、本実施形態に係るGPSの概略ブロック図である。
図1に示すように、GPSは、測位装置1、GPS衛星2から構成されている。測位装置(GPS受信機)1は、軌道予測装置10、測位算出部20を備えている。なお、GPS衛星2は、1機ではなく、24機以上の衛星から構成される。
軌道予測装置10は、情報取得部110、記憶部115、アルマナック取得部120、衛星型抽出部125、エフェメリス取得部130、衛星位置速度算出部135、衛星位置・速度記憶部140、演算開始判定部145、パラメータ推定部150、軌道予測演算部155、予測結果記憶部160を備えている。
【0023】
情報取得部110は、GPS衛星2が送信する航法メッセージから、UTC関係情報、GPS時刻、電離層遅延補正係数を取得し、取得したGPS時刻、UTC関係情報と電離層遅延補正係数を記憶部115に記憶させる。
記憶部115には、GPS時刻、UTC関係情報と電離層遅延補正係数が記憶されている。
【0024】
アルマナック取得部120(情報取得部)は、GPS衛星2が送信したアルマナック・データを取得し、取得したアルマナック・データを衛星型抽出部125に出力する。
衛星型抽出部125は、アルマナック取得部120が出力するアルマナック・データから衛星型番号を抽出し、抽出した衛星型番号を衛星位置・速度記憶部140に記憶させる。なお、衛星型番号とは、Block IIA,Block IIR,Block IIR−M,Block IIFなどのGPS衛星2の型を示す番号である。
【0025】
エフェメリス取得部130(情報取得部)は、GPS衛星2が送信するエフェメリス・データを取得し、取得したエフェメリス・データを衛星位置速度算出部135に出力する。
【0026】
衛星位置速度算出部135は、エフェメリス取得部130が出力したエフェメリス・データから衛星の状態(Health)を抽出する。衛星位置速度算出部135は、抽出した衛星の状態が健康であるか否かを判別する。衛星の状態とは、衛星の状態を表すコードで、0以外は何らかの異常が衛星にあることを示している。
衛星の状態が健康であると判別した場合、衛星位置速度算出部135は、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する。衛星位置速度算出部135は、衛星位置・速度記憶部140に記憶されているGPS衛星2の位置と速度情報(以下、位置速度情報という)の内、算出した時刻TOE2−3日より以前の情報を保存領域から削除する。時刻TOE2−3日より以前の情報を保存領域から削除する理由は、エフェメリス・データを均等に3日分記憶させるためである。後述するように、このように均等に3日分、記憶させたエフェメリス・データを用いて軌道予測装置10が軌道予測を行った場合、予測誤差が少なくなるためである。
衛星位置速度算出部135は、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されているか否かを判別する。衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合、後述するように、衛星位置速度算出部135は、TOE2の位置速度情報を削除後、衛星位置・速度記憶部140の保存領域の空きが、2個分の位置速度情報を記憶できる領域になるまで情報を削除する。衛星位置速度算出部135は、時刻TOE2と時刻TOE2+2時間の各時刻の各GPS衛星2の各位置と各速度を算出し、算出した2つの時刻の位置と速度を位置速度情報として衛星位置・速度記憶部140に記憶させる。
衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合、後述するように、衛星位置速度算出部135は、衛星位置・速度記憶部140の保存領域の空きが、3個分の位置速度情報を記憶できる領域になるまで情報を削除する。衛星位置速度算出部135は、時刻TOE2、時刻TOE−2時間、及び時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出し、算出した2つの時刻の位置と速度を位置速度情報として衛星位置・速度記憶部140に記憶させる。
【0027】
衛星位置・速度記憶部140には、衛星型番号、各GPS衛星2における各時刻の位置速度情報が記憶されている。
演算開始判定部145は、衛星位置・速度記憶部140から過去の位置速度情報、衛星型番号を読み出し、記憶部115からGPS時刻、UTC関係情報及び電離層遅延補正係数を読み出す。演算開始判定部145は、読み出した情報に基づき、後述する演算開始条件を満たしているか否かを判定する。演算開始条件を満たしていると判別した場合、演算開始判定部145は、パラメータ推定部150に読み出した情報と判定結果を出力する。
【0028】
パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、推定パラメータsを推定する。パラメータ推定部150は、推定した推定パラメータを軌道予測演算部155に出力する。なお、推定パラメータsは、後述するように11個の成分を有するベクトルである。
軌道予測演算部(軌道予測部)155は、パラメータ推定部150が出力する推定パラメータsを使用し、後述するように、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。軌道予測演算部155は、算出した予測軌道値を予測結果記憶部160に記憶させる。
予測結果記憶部160には、予測軌道値が記憶されている。
測位算出部20は、予測結果記憶部160に記憶されている予測軌道値を読み出し、読み出した予測軌道値を外挿して衛星位置を算出し、公知の手法で位置測位を行う。
【0029】
なお、軌道予測装置10は、航法メッセージを受信し、受信した航法メッセージを復調して、復調した航法メッセージから各データを抽出する。情報取得部110とアルマナック取得部120及びエフェメリス取得部130は、この抽出された各データを取得している。例えば、情報取得部110が航法メッセージを復調し、復調した航法メッセージから各データを抽出し、抽出した各情報を衛星型抽出部125及び衛星位置速度算出部135に出力し、記憶部115に書き込むようにしてもよい。また、記憶部115、衛星位置・速度記憶部140、及び予測結果記憶部160に分ける例を説明したが、これらの記憶部をまとめて1つの記憶部に記憶させるようにしてもよい。
【0030】
軌道予測装置10が行う処理について説明する。
まず、軌道予測装置10は、航法データの取得を開始する。
次に、アルマナック取得部120は、GPS衛星2が送信するアルマナック・データを取得し、取得したアルマナック・データを衛星型抽出部125に出力する。
次に、衛星型抽出部125は、アルマナック取得部120が出力するアルマナック・データから衛星型番号を抽出し、抽出した衛星型番号を衛星位置・速度記憶部140に記憶させる。
次に、情報取得部110は、GPS衛星2が送信する航法メッセージのサブフレーム4のデータから、電離層遅延補正係数、GPS時刻、及びUTC関係情報を取得し、取得した電離層遅延補正係数、GPS時刻、及びUTC関係情報を記憶部115に記憶させる。
【0031】
次に、過去のGPS衛星の位置と速度データを記憶させる処理について、図2を用いて説明する。図2は、本実施形態に係る過去のGPS衛星の位置と速度データを記憶させる処理のフローチャートである。
【0032】
(ステップS1)エフェメリス取得部130は、GPS衛星2からエフェメリス・データが送信されるのを待つ。GPS衛星2からエフェメリス・データが送信された場合、エフェメリス取得部130は、GPS衛星2が送信するエフェメリス・データを取得し、取得したエフェメリス・データを衛星位置速度算出部135に出力する。ステップS1終了後、ステップS2に進む。
【0033】
(ステップS2)衛星位置速度算出部135は、エフェメリス取得部130が出力するエフェメリス・データから各衛星の状態を抽出する。衛星位置速度算出部135は、抽出した各衛星の状態が異常を示す値ではないか否か且つエポック時刻toeが更新されたデータであるか否かを判別する。
各衛星の状態が異常を示す値ではない、すなわち健康であり且つエポック時刻toeが更新されたデータであると判別した場合(ステップS2;Yes)、ステップS3に進む。各衛星の状態が異常を示す値である、または、エポック時刻toeが更新されたデータではないと判別した場合(ステップS2;No)、ステップS1に戻る。
【0034】
(ステップS3)各衛星の状態が異常を示す値ではない且つエポック時刻toeが更新されたデータであると判別した場合、衛星位置速度算出部135は、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する。なお、取得したエフェメリス・データをエポック時刻toeに近い偶数正時TOE2に変換する理由は、GPS衛星2から送信されたエポック時刻toeが、2時間間隔ではなく、まれにずれることがあるためである。
時刻TOE2を時刻t(k)(k=0,・・・,n−1)と表現する。以降の処理上、位置はr(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での位置のx成分がr(3k)、位置のy成分がr(3k+1)、位置のz成分がr(3k+2)である。速度はv(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での速度x成分がv(3k)、速度y成分がv(3k+1)、速度z成分がv(3k+2)である。
衛星位置速度算出部135は、衛星位置・速度記憶部140に記憶されている位置速度情報の内、算出した時刻TOE2−3日より以前の情報を保存領域から削除する。ステップS3終了後、ステップS4に進む。
【0035】
(ステップS4)衛星位置速度算出部135は、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されているか否かを判別する。
衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合(ステップS4;Yes)、ステップS5に進む。衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合(ステップS4;No)、ステップS7に進む。なお、衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていない状態は、例えば、GPS衛星2が測位装置1から見て遮蔽されていて、エフェメリス・データを受信できない場合、測位装置1の電源がオフ状態などである。
【0036】
(ステップS5)衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていると判別した場合、衛星位置速度算出部135は、TOE2の位置速度情報を削除後、衛星位置・速度記憶部140の保存領域の空きが、2個分の位置速度情報を記憶できる領域になるまで位置速度情報を削除する。衛星位置速度算出部135は、経過時間の古いものから、2n時間(nは1以上の自然数)毎の隣り合う情報の内、新しい時刻の情報を削除する。なお、経過時間とは、衛星位置・速度記憶部140に1つも記憶されていない状態から位置速度情報の記憶を開始してからの時間の経過であり、図3における縦軸に示した時間である。
具体的には、2時間毎の隣り合う情報の内、新しい時刻の情報を削除する。2時間毎の隣り合う情報を比較して、情報を削除しても、空き領域を確保できない場合は、4時間毎に隣り合う情報の内、新しい方の情報を削除する。空き領域を確保できない場合、衛星位置速度算出部135は、6時間毎に隣り合う情報について比較、削除を行う。空き領域を確保できない場合、衛星位置速度算出部135は、8時間毎に隣り合う情報について比較、削除を行う。ステップS5終了後、ステップS6に進む。
【0037】
(ステップS6)次に、衛星位置速度算出部135は、時刻TOE2と時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出する。次に、衛星位置速度算出部135は、算出した2つの時刻の各位置速度情報を衛星位置・速度記憶部140に記憶させる。なお、記憶されるGPS衛星2の位置と速度はECEF(地球中心・地球固定)座標系である。ステップS6終了後、ステップS1に戻る。
【0038】
(ステップS7)衛星位置・速度記憶部140に時刻TOE2の位置速度情報が記憶されていないと判別した場合、衛星位置速度算出部135は、衛星位置・速度記憶部140の保存領域の空きが、3個分の位置速度情報を記憶できる領域になるまで位置速度情報を削除する。衛星位置速度算出部135は、経過時間の古いものから、2n(nは1以上の自然数)時間毎の隣り合う情報の内、新しい時刻の情報を削除する。
具体的には、2時間毎の隣り合う情報を比較して、情報を削除しても、空き領域を確保できない場合は、4時間毎に隣り合う情報の内、新しい方の情報を削除する。空き領域を確保できない場合、衛星位置速度算出部135は、6時間毎に隣り合う情報について比較、削除を行う。空き領域を確保できない場合、衛星位置速度算出部135は、8時間毎に隣り合う情報について比較、削除を行う。ステップS7終了後、ステップS8に進む。
【0039】
(ステップS8)次に、衛星位置速度算出部135は、時刻TOE2、時刻TOE2−2時間、及び時刻TOE2+2時間の各時刻のGPS衛星2の各位置と各速度を算出する。次に、衛星位置速度算出部135は、算出した3つの時刻の各位置速度情報を衛星位置・速度記憶部140に記憶させる。ステップS8終了後、ステップS1に戻る。
【0040】
次に、衛星位置・速度記憶部140に記憶される位置速度情報の順番と、削除される順番の具体的な例について、図3を用いて説明する。図3は、本実施形態に係る衛星位置・速度記憶部140に記憶される位置速度情報と、削除される位置速度情報の一例を説明する図である。図3において、横軸は保存回数、縦軸は経過時間である。なお、経過時間において、2時間毎のデータであり、「2」は4時間を表している。また、保存回数とは、エフェメリス・データから、GPS衛星2の位置と速度を計算し、衛星位置・速度記憶部140へ位置速度情報を保存した回数である。経過時間は、保存開始の時刻から各保存された情報の時刻までの経過時間である。
【0041】
まず、保存回数1では、まだ時刻TOE2の位置速度情報が衛星位置・速度記憶部140に記憶されていない。このため、図3に示すように、衛星位置速度算出部135は、経過時間0、1(2時間後)、及び2(4時間後)の位置速度情報を衛星位置・速度記憶部140に記憶する。この場合、衛星位置速度算出部135は、ステップS8で説明したように、時刻TOE2(g2)と、時刻TOE2−2時間(g1)、及び時刻TOE2+2時間(g3)の3つの位置速度情報を衛星位置・速度記憶部140に記憶する。
保存回数2において、ステップS6で説明したように、衛星位置速度算出部135は、2つの位置速度情報が衛星位置・速度記憶部140に記憶する。この場合、衛星位置速度算出部135は、この時点で最新の位置速度情報である位置速度情報g3を削除した後、時刻TOE2の位置速度情報を位置速度情報g3’として衛星位置・速度記憶部140に記憶させる。位置速度情報g3を削除する理由は、保存回数2における時刻TOE2時間は、保存回数1における時刻TOE2+2時間であるためである。そして、衛星位置速度算出部135は、時刻TOE2+2時間の位置速度情報を位置速度情報g4として記憶させる。
同様に、保存回数3において、衛星位置速度算出部135は、位置速度情報g4を削除した後、時刻TOE2の位置速度情報を位置速度情報g4’として記憶させる。そして、時刻TOE2+2時間の位置速度情報を、位置速度情報g5として記憶する。
【0042】
経過時間4から10の期間、記憶されている情報がないのは、エフェメリス・データを軌道予測装置10が取得できなかったことを表している。
保存回数4において、保存回数4における時刻TOE2から直近の偶数正時、すなわち経過時間10(20時間)にGPS衛星2の位置と速度情報が衛星位置・速度記憶部140に記憶されていないため、ステップS8のように、衛星位置速度算出部135は、再び3つの時刻の位置速度情報を衛星位置・速度記憶部140に記憶させる。このような動作を繰り返していくと、保存回数6で、衛星位置・速度記憶部140に保存される位置速度情報が10個になる。
【0043】
保存回数6に達した後の衛星位置・速度記憶部140に記憶されている位置速度情報を、便宜的にg11〜g20とする。
保存回数7において、ステップS5で説明したように、衛星位置速度算出部135は、2つの位置速度情報分の記憶領域を確保する。このため、まず、保存回数6までと同様に、衛星位置速度算出部135は、保存回数6で保存された位置速度情報g20を削除する。次に、衛星位置速度算出部135は、位置速度情報を2つ書き込める領域が確保できるまで、衛星位置・速度記憶部140に保存されている位置速度情報を削除する。
具体的には、衛星位置速度算出部135は、経過時間が一番古い2時間間隔のペアの位置速度情報g11とg12を比較する。位置速度情報g11は、保存回数1で記憶された位置速度情報g1であるので、保存回数1における時刻TOE2−2時間の位置速度情報である。位置速度情報g12は、保存回数1で記憶された位置速度情報g1であり、保存回数1における時刻TOE2の位置速度情報である。位置速度情報g12の方が新しい情報であるので、衛星位置速度算出部135は、位置速度情報g12を削除する。このようにして、衛星位置速度算出部135は、2つの空き領域を確保する。
次に、衛星位置速度算出部135は、衛星位置・速度記憶部140に、時刻TOE2時間の位置速度情報を新たな位置速度情報g20として記憶させ、時刻TOE2+2時間の位置速度情報をg21として記憶させる。
【0044】
なお、本実施形態では、ステップS5及び保存回数7において、2つの位置速度情報を削除した後に、時刻TOEの位置速度情報と時刻TOE+2時間の位置速度情報を衛星位置・速度記憶部140に記憶させる例を説明した。しかしながら、1つの位置速度情報を削除した後に、時刻TOE+2時間の位置速度情報を記憶させ、時刻TOEの位置速度情報と上書きするようにしてもよい。具体的には、保存回数7において衛星位置速度算出部135は、位置速度情報g11とg12を比較する。衛星位置速度算出部135は、比較結果に基づき、時刻の新しい方の位置速度情報g12を削除する。
次に、衛星位置速度算出部14は、時刻TOE2時間の位置速度情報を、位置速度情報g20に上書きし、時刻TOE2+2時間の位置速度情報をg21として記憶させるようにしてもよい。
【0045】
このように、衛星位置速度算出部135は、衛星位置・速度記憶部140の位置速度情報に対して削除と追加を繰り返す。
保存回数13において、衛星位置・速度記憶部140に記憶されている位置速度情報を、便宜上g21〜g30とする。
保存回数14において、時刻TOE2の位置速度情報が衛星位置・速度記憶部140に記憶されていないため、3つの位置速度情報を削除する必要がある。この場合、衛星位置速度算出部135は、まず、経過時間が一番古い2時間間隔のペアの位置速度情報g28とg29を比較し、比較結果に基づき、位置速度情報g29を削除する。次に、衛星位置速度算出部135は、経過時間が一番古い4時間間隔のペアの位置速度情報g24とg25を比較し、比較結果に基づき、位置速度情報g25を削除する。次に、衛星位置速度算出部135は、経過時間が二番古い4時間間隔のペアの位置速度情報g26とg27を比較し、比較結果に基づき、位置速度情報g27を削除する。
以上の処理により、保存回数13で保存されていた位置速度情報から3個の位置速度情報の削除を完了する。
また、保存回数15回において、衛星位置速度算出部135は、経過時間0の情報が、ステップS3で説明した時刻TOE2−3日の位置速度情報であるため削除する。
【0046】
次に、このように、衛星位置・速度記憶部140に記憶されている位置速度情報を、間引きながら保存する理由について説明する。図4は、保存間隔毎の予測誤差の一例を説明する図である。図4(a)と図4(b)は、位置速度情報を4時間毎、均等に3日間分取得した例である。図4(c)と図4(d)は、位置速度情報を3日間分の内、前後にのみ取取得し、3日に渡って中抜けした例である。図4(e)と図4(f)は、位置速度情報を3日の内、2日間に渡って中抜けした例である。
図4(a)、図4(c)及び図4(e)において、横軸は予測誤差の最大値を表し、縦軸はその割合を表している。図4(b)、図(d)及び図(f)において、横軸は時間を表し、白丸は位置速度情報を取得できなかった「中抜け」状態を表し、黒丸は位置速度情報を取得できた状態を表している。
4時間間隔の場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(a)に示すように、予測誤差の最大値は7[m]以下である。中抜けが3日に渡る場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(c)に示すように、予測誤差の最大値は20[m]以上もあり、その割合もランダムである。中抜けが2日に渡る場合、このように取得された位置速度情報を用いて、GPS衛星2の位置を予測すると、図4(e)に示すように、予測誤差の最大値は20[m]以上が50%もある。
このように、予測誤差を抑えるには、中抜けの期間が長い状態は好ましくなく、位置速度情報が均等に保存されていることが好ましい。
【0047】
このため、本実施形態では、単に10個の位置速度情報を時系列に記憶させているのではなく、限られた記憶容量内で3日分の位置速度情報を時間間隔が均等に記憶するように、保存した位置速度情報を削除して、新たな位置速度情報を記録するようにした。この結果、予測誤差を抑えることができるので、精度良く軌道予測を行うことができる。
【0048】
次に、軌道予測を行う処理手順について、図5を用いて説明する。図5は、本実施形態に係る軌道予測を行う処理手順のフローチャートである。
【0049】
(ステップS101)軌道予測装置10は、ステップS1〜S8の過去の位置速度情報を記憶させる処理を行う。
ここで、エポック時刻toeに近い偶数正時TOE2を時刻t(k)(k=0,・・・,n−1)と表現する。以降の処理上、位置はr(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での位置のx成分がr(3k)、位置のy成分がr(3k+1)、位置のz成分がr(3k+2)である。速度はv(i)(i=0,・・・,3n−1)と表現する。時刻t(k)での速度x成分がv(3k)、速度y成分がv(3k+1)、速度z成分がv(3k+2)である。
ステップS101終了後、ステップS102に進む。
【0050】
(ステップS102)演算開始判定部145は、衛星位置・速度記憶部140から過去の位置速度情報、衛星型番号を読み出し、記憶部115から電離層遅延補正係数、GPS時刻、及びUTC関係情報を読み出す。演算開始判定部145は、読み出した情報に基づき、演算開始条件を満たしているか否かを判定する。演算開始条件とは、以下の5つである。
1.過去の位置速度情報が9個以上記憶されていること
2.記憶部115に記憶されている衛星型番号が有効で、衛星型がBLOCK IIA、BLOCK IIR、BLOCK IIR−Mであること
3.軌道予測が未完了であること
4.RTC(実時間のクロック)の補正が完了していること
5.アルマナック・データが有効であること
演算開始条件を満たしていないと判別した場合、ステップS101に戻る。
演算開始条件を満たしていると判別した場合、演算開始判定部145は、パラメータ推定部150に読み出した情報と判定結果を出力する。
ステップS102終了後、ステップS103に進む。
【0051】
(ステップS103)パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、以下の11個の成分を有するベクトルである推定パラメータsを推定する。
成分1 s(0);時刻t(0)での衛星位置のx成分(初期値r(0))
成分2 s(1);時刻t(0)での衛星位置のy成分(初期値r(1))
成分3 s(2);時刻t(0)での衛星位置のz成分(初期値r(2))
成分4 s(3);時刻t(0)での衛星速度のx成分(初期値v(0))
成分5 s(4);時刻t(0)での衛星速度のy成分(初期値v(1))
成分6 s(5);時刻t(0)での衛星速度のz成分(初期値v(2))
成分7 s(6);太陽輻射圧パラメータのワイバイアス(Y−bias)(初期値0)
成分8 s(7);太陽輻射圧パラメータのスケールファクタ(scale Factor)(初期値1)
成分9 s(8);地球自転パラメータの極運動x方向(初期値0)
成分10 s(9);地球自転パラメータの極運動y方向(初期値0)
成分11 s(10);地球自転パラメータの地球自転速度変化(初期値0)
パラメータ推定部150は、推定した推定パラメータを軌道予測演算部155に出力する。ステップS103終了後、ステップS104に進む。なお、ワイバイアスとは、軌道におけるGPS衛星2の太陽パネル(ソーラーパネル)の梁方向(Beam Directions)であるy軸に対するバイアス成分であり、スケールファクタとは、スケール係数である。太陽輻射圧、ワイバイアス及びスケースファクタについては、例えば、非特許文献1(” New Empirically Derived Solar Radiation Pressure Model for Global Positioning System Satellites”, Y.Bar-Sever and D.Kuang, IPN Progress Report 42-159, Nov 15, 2004)参照。
【0052】
(ステップS104)軌道予測演算部155は、パラメータ推定部150が出力する推定パラメータsを使用し、後述するように、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。ステップS104終了後、ステップS105に進む。
【0053】
(ステップS105)軌道予測演算部155は、算出した予測軌道値を予測結果記憶部160に記憶させる。ステップS105終了後、ステップS106に進む。
【0054】
(ステップS106)測位算出部20は、予測結果記憶部160から予測軌道値を読み出し、読み出した予測軌道値を外挿し衛星位置を算出し、公知の手法で測位を行う。
【0055】
次に、ステップS103〜S104で行う衛星位置p0(i)の軌道計算の方法について、図6を用いて説明する。図6は、本実施形態に係る衛星位置p0(i)の軌道計算の処理手順のフローチャートである。
(ステップS201)まず、パラメータ推定部150は、演算開始判定部145が出力する読み出された情報と判定結果を用いて、推定パラメータsで軌道計算する(ステップS103)。
時刻t(0)での軌道における衛星位置において、半径方向、進行方向、軌道面垂直方向の各単位ベクトルd1、d2、d3は、次式(2)〜(4)のように表される。
【0056】
【数2】
【0057】
【数3】
【0058】
【数4】
【0059】
なお、式(2)において、r(0)、r(1)、r(2)はGPS衛星2の位置を表し、√((r(0))2+(r(1))2+(r(2))2)は地球からGPS衛星2との距離を表している。
【0060】
(ステップS202)パラメータ推定部150は、最小二乗法による推定を行うために、推定パラメータの値をΔsずらす。パラメータ推定部150は、j=0に対して推定パラメータのs(0),s(1),s(2)をs(0)+d1(0)Δs(0),s(1)+d1(1)Δs(0),s(2)+d1(2)Δs(0)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。
【0061】
A(i,0)=(p(i)−p0(i))/Δs(0) ・・・(5)
【0062】
式(5)において、p0(i)は、Δs(0)ずらす前のGPS衛星2の位置であり、p(i)は、Δs(0)ずらした後のGPS衛星2の位置である。このため、式(5)において、行列Aは、各パラメータをΔs(0)ずらした時に、GPS衛星2の位置がどれだけずれたかの変化量である偏微分値の行列を表している。また、ステップS202の計算は、GPS衛星2の位置を半径方向d1にΔs(0)ずらした衛星位置の計算を行っている。また、位置をずらす量Δs(0)は、予め定められている量を用いる。そして、Δs(0)は、例えば、実験により算出する。この場合、パラメータ推定部150での桁落ちを考慮し、sの値に応じて、Δsjを設定するようにしてもよい。
【0063】
(ステップS203)軌道予測演算部155は、j=1に対して推定パラメータのs(0),s(1),s(2)をs(0)+d3(0)Δs(1),s(1)+d3(1)Δs(1),s(2)+d3(2)Δs(1)に代え、時刻t(k)でのGPS衛星2の位置p(i)を軌道計算する。また、ステップS203の計算は、GPS衛星2の位置を垂直方向d3にΔs(1)ずらしたGPS衛星2の位置の計算を行っている。
【0064】
A(i,1)=(p(i)−p0(i))/Δs(1) ・・・(6)
【0065】
(ステップS204)パラメータ推定部150は、j=2に対して推定パラメータのs(3),s(4),s(5)をs(3)+d1(0)Δs(2),s(4)+d1(1)Δs(2),s(5)+d1(2)Δs(2)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。また、ステップS204の計算は、GPS衛星2の位置を半径方向d1にΔs(2)ずらした位置の計算を行っている。
【0066】
A(i,2)=(p(i)−p0(i))/Δs(2) ・・・(7)
【0067】
(ステップS205)パラメータ推定部150は、j=3に対して推定パラメータのs(3),s(4),s(5)をs(3)+d2(0)Δs(3),s(4)+d2(1)Δs(3),s(5)+d2(2)Δs(3)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。また、ステップS205の計算は、GPS衛星2の位置を進行方向d2にΔs(3)ずらした位置の計算を行っている。
【0068】
A(i,3)=(p(i)−p0(i))/Δs(3) ・・・(8)
【0069】
すなわち、本実施形態では、GPS衛星2の位置の半径方向と垂直方向、GPS衛星2の速度の半径方向と進行方向の計4つのパラメータを推定する。なお、ステップS202とS203において、半径方向と垂直方向にのみずらし、進行方向にずらした場合の位置の計算を行わない理由は、進行方向にずらしても、将来のGPS衛星2の位置への影響が少ないためである。すなわち、地球からの重力の位置への変化量の影響が少ないため、進行方向は推定しない。同様に、ステップS204とS205において、半径方向と進行方向にのみずらし、垂直方向にずらした場合の位置の計算を行わない理由は、垂直方向にずらしてもGPS衛星2の速度への影響が少ないためである。すなわち、地球からの重力の加速度への変化量の影響が少ないため、進行方向は推定しない。
【0070】
(ステップS206)パラメータ推定部150は、j=4,・・・,8(成分7〜11の太陽輻射圧と地球自転との5つパラメータ)に対して推定パラメータの1つの成分s(j+2)をs(j+2)+Δs(j)に代え、時刻t(k)での衛星位置p(i)を軌道計算する。
【0071】
A(i,j)=(p(i)−p0(i))/Δs(j) ・・・(9)
【0072】
ただし、式(5)〜式(7)において、i=0,・・・,3n−1であり、式(9)において、j=4,・・・,8である。
【0073】
(ステップS207)パラメータ推定部150は、次式(10)を用いて、最小二乗法により推定パラメータsを算出する。
【0074】
s=s+B(A×AT)−1×AT(r−p0) ・・・(10)
【0075】
式(10)において、Tは転置行列を表し、rはエフェメリス・データから求めたGPS衛星2の位置を表し、p0は、推定パラメータから軌道計算したGPS衛星2の位置を表し、「−1」は逆行列を表している。推定したGPS衛星2のずれは、推定パラメータのずれによるものである。このため、パラメータ推定部150は、推定パラメータのずれ量を式(5)〜(9)で求めて更新する。
また、式(10)において、Tは転置行列を表し、行列Bは、次式(11)である。なお、行列Aは、GPS衛星2の位置の半径方向と垂直方向の成分、GPS衛星2の速度の半径方向と進行方向の成分である。行列Bは、この行列Aの成分を、元のxyz方向の成分に座標系を変換する役割をしている。
【0076】
【数5】
【0077】
(ステップS208)パラメータ推定部150は、推定パラメータsが収束したか否かを判別する。例えば、ステップS201〜S208を繰り返すことで、Δs変化させても、予め定められている範囲内のずれしか発生しなくなった場合、収束したとする。
推定パラメータsが収束したと判別した場合(ステップS208;Yes)、ステップS209に進む。推定パラメータの1つの成分sが収束していないと判別した場合(ステップS208;No)、ステップS201に戻る。
(ステップS209)軌道予測演算部155は、この推定パラメータの1つの成分sを使用し、例えば将来3日間2時間ごとの時刻te(k)(k=0,・・・,36)での衛星位置pe(i)(i=0,・・・,110)を軌道計算する。
【0078】
次に、パラメータ推定部150および軌道予測演算部155が行う軌道計算の例について説明する。
(手順1)推定パラメータsの最初の6個のパラメータ衛星位置速度をECEF座標系
からECI(地心慣性;Earth Centered Inertial)座標系に変換する。
(手順2)GPS時刻をUTC時刻に変換する。
(手順3)GPS衛星2に加わる力(地球からの重力、月からの重力、太陽からの重力、太陽輻射圧)を計算する。
(手順4)GPS衛星2に加わる力を加速度に変換し数値積分し、将来のGPS衛星2の位置と速度を算出する。用いる数値積分法は、例えば、RKF45及びCowellである。座標系、時刻系、衛星に加わる太陽輻射圧以外の力、数値積分については、例えば、非特許文献2(‘’Satellite Orbits, Models, Methods and Application’’, O.Montenbruck and E.Gill, Springer,2005)の2章「Introductory Astrodynamics」、3章「Force Model」、4章「Numerical Integration」、5章「Time and Reference Systems」、及び8章の「Orbit Determination and Parameter Estimation」参照。
(手順5)算出したGPS衛星2の位置と速度をECI座標系からECEF座標系に変換する。
【0079】
このように算出された位置速度情報、及び実測により取得された位置速度情報、UTC関係情報、GPS時刻、電離層遅延補正係数を用いて、測位算出部20は、公知の手法で位置測定を行う。
【0080】
なお、従来行われている軌道予測処理は、例えば以下である。
(手順101)本実施形態と同様に、従来の軌道予測装置は、各種の情報をGPS衛星2から受信する。
(手順102)従来の軌道予測速装置は、本実施形態と同様に11個の成分を有するベクトルである推定パラメータsを推定する。
(手順103)従来の軌道予測装置は、最小二乗法による予測推定を行うために、推定パラメータの値をΔsずらす。従来の軌道予測装置は、推定パラメータsの1つの成分s(j)をs(j)+Δs(j)に代え、時刻t(k)(k=0,・・・,n−1)での衛星位置p(i)(i=0,・・・,3n−1)を軌道計算する。なお、iは、GPS衛星2の位置の何番目がずれるのかを表している。jは、0から10であり、どのパラメータをずらしたかを表している。
【0081】
A(i,j)=(p(i)−p0(i))/Δs(j) ・・・(12)
【0082】
式(12)において、p0(i)は、Δs(j)ずらす前のGPS衛星2の位置であり、p(i)は、Δs(j)ずらした後のGPS衛星2の位置である。
(手順104)従来の軌道予測装置は、式(12)で求めた誤差量を用いて、次式(13)を用いて、推定パラメータsを算出する。
【0083】
s=s+(A×AT)−1×AT(r−p0) ・・・(13)
【0084】
式(13)において、Tは転置行列を表し、rはエフェメリス・データから求めたGPS衛星2の位置を表し、p0は、推定パラメータから軌道計算したGPS衛星2の位置を表し、「−1」は逆行列を表している。推定したGPS衛星2の位置に対するずれは、推定パラメータのずれによるものであるため、推定パラメータのずれ量を式(12)で求めて更新する。
従来の軌道予測装置は、推定パラメータsが収束するまで、手順102から104を繰り返す。従来の軌道予測装置は、このように算出された推定パラメータsを用いて将来のGPS衛星2の位置peを軌道計算していた。
また、従来技術では、位置と速度について、衛星位置の半径方向と進行方向及び垂直方向、衛星速度の半径方向と進行方向及び垂直方向の計6つのパラメータについて推測していた。
【0085】
一方、本実施形態では、上述したように、推定パラメータsの算出において、半径方向と垂直方向に対してΔsずらして衛星の位置の推定し、半径方向と進行方向に対してΔsずらして衛星の速度の推定を行うようにした。このように、本実施形態では、11個の成分の内、9つのパラメータを推定するようにしたので、従来技術の11個のパラメータを推定する場合と比較して推測にかかる演算コストを下げることができる。すなわち、パラメータ数を減らしたので、最小二乗法を行う行列を小さくできるため、演算に要する記憶部の容量を小さくでき、さらに演算に係る時間を短くできる。このように推定するパラメータを削減しても、従来技術と同等に、精度良く軌道予測を行うことができる。
【0086】
以上のように、本実施形態の軌道予測装置10は、エフェメリス・データから算出した位置速度情報を、時間間隔が均等になるように衛星位置・速度記憶部140に記憶させる。また、軌道予測装置10は、衛星位置・速度記憶部140に記憶されている位置速度情報が、予め定めた個数以上の場合、時間間隔が均等になるように衛星位置・速度記憶部140から位置速度情報を削除する。このように均等に記憶された位置速度情報を用いて、軌道予測を行うので、従来技術と比較して、予測誤差を小さくできる効果がある。
また、推定パラメータの内、GPS衛星2の位置の進行方向、GPS衛星2の速度の垂直方向の計2つのパラメータについて推定しないようにした。このため、最小二乗法で用いる行列を従来技術より小さくできるので、推定に必要なメモリ容量を削減できる。また、最小二乗法で用いる行列を小さくできるので、演算に係る時間を短くできる効果もある。このため、軌道予測装置10のコストを下げることができ、さらに演算時間を短くできるため、起動後に従来技術より短時間で測位を開始できる。この結果、利用者にとって利便性が増すので、使用頻度を増す効果もある。
【0087】
また、本実施形態の軌道予測装置10は、衛星位置の半径方向と進行方向及び軌道面垂直方向の各単位ベクトルd1とd2及びd3を用いて衛星の位置と速度との各偏微分値である行列Aを算出し、算出した行列Aを元のxyz方向の成分に座標系を変換する行列Bを用いて推定パラメータを算出するようにした。このため、本実施形態の軌道予測装置10は、推定に使用するパラメータを従来技術より削減でき、未知数が少なくなるので、推定に必要な観測方程式も削減できる。この結果、本実施形態の軌道予測装置10は、従来技術と比較して少ないエフェメリス・データで軌道予測を行えるので、軌道予測に要する時間を削減することができる。この結果、起動後に従来技術より短時間で位置測位を開始できるので、利用者にとって利便性が増すので、使用頻度を増す効果もある。
例えば、一般的なGPS受信装置では、電源オフ状態から電源オン状態になった後、エフェメリス・データの取得を開始する。そして、エフェメリス・データ取得後、パラメータの推定及び軌道推定を開始する。パラメータの推定にかかる時間が長い場合、推定途中で測位装置の電源をオフ状態にされてしまうと、それまでの演算結果が無効なままである。このため、電源オン状態になった後、再度、エフェメリス・データの取得からやり直す必要が生じる場合があった。
一方、本実施形態の軌道予測装置10は、軌道推定にかかる時間が短いため、利用者が電源をオフ状態にする前に推定を完了し、推定結果をGPS受信部内の記憶部に記憶させておくことが可能になる。そして、このように記憶された推定結果を、電源オフ状態からオン状態になった場合に用いて推定を行えるので、本実施形態の軌道予測装置10は、電源オン状態後に位置測位開始までの時間を短縮できる。
また、従来技術と同数のエフェメリス・データを用いて軌道予測を行った場合、推定に用いるパラメータの数を削減したため、観測方程式の数に対して推定パラメータの数が減ったため、パラメータ間の共分散が減少し,精度の良いパラメータ値を推定できる。この結果、本実施形態の軌道予測装置10は、推定精度を改善することができる。なお、推定しないパラメータに関しては、実測により、軌道予測に十分な精度のデータであることを確認している。
【0088】
[第2実施形態]
第1実施形態では、推定パラメータの内、9つのパラメータを推定する例を説明した。本実施形態では、第1実施形態で用いた9個の成分のうち、さらに、太陽輻射圧パラメータのワイバイアスとスケールファクタの2つを推定せず、7個の成分のベクトルによる推定パラメータsを推定する例を説明する。
なお、太陽輻射圧パラメータのワイバイアスとスケールファクタは、GPS衛星2毎に固有の固定値を、予めGPS衛星2毎に算出して軌道予測装置10内のいずれかの記憶部か機能部に、予め記憶させておく。例えば、所定の期間のデータを算出して、平均値を記憶させるようにしてもよい。
【0089】
次に、過去のGPS衛星2の位置と速度データを記憶させる処理について、図2、図5及び図6を用いて説明する。
GPS衛星2の位置と速度情報の記憶と削除は、第1実施形態と同様に行う(図2、ステップS1〜S8)。
第1実施形態と異なるのは、衛星位置p0(i)の軌道計算の方法である。
(ステップS201’)軌道予測演算部155は、推定パラメータsを使用し、時刻t(k)での衛星位置p0(i)(i、・・・、3n−1)を軌道計算する。
推定パラメータsは、以下の9個の成分のベクトルである。
成分1 s(0);時刻t(0)での衛星位置のx成分(初期値r(0))
成分2 s(1);時刻t(0)での衛星位置のy成分(初期値r(1))
成分3 s(2);時刻t(0)での衛星位置のz成分(初期値r(2))
成分4 s(3);時刻t(0)での衛星速度のx成分(初期値v(0))
成分5 s(4);時刻t(0)での衛星速度のy成分(初期値v(1))
成分6 s(5);時刻t(0)での衛星速度のz成分(初期値v(2))
成分7 s(6);地球自転パラメータの極運動x方向(初期値0)
成分8 s(7);地球自転パラメータの極運動y方向(初期値0)
成分9 s(8);地球自転パラメータの地球自転速度変化(初期値0)
【0090】
時刻t(0)での衛星位置において、半径方向、進行方向、軌道面垂直方向の各単位ベクトルd1、d2、d3は、第1実施形態と同様に式(2)〜(4)のように表される。
【0091】
ステップS202〜ステップS205は、第1実施形態と同様に行う。
(ステップS206’)軌道予測演算部155は、j=4,5,6に対して推定パラメータの1つの成分s(j+2)をs(j+2)+Δs(j)に代え、時刻t(k)での衛星位置p(i)を式(9)のように軌道計算する。ただし、式(9)おいて、j=4,5,6である。
【0092】
(ステップS207’)軌道予測演算部155は、次式(14)を用いて、推定パラメータsを算出する。
【0093】
s=s+B(A×AT)−1×AT(r−p0) ・・・(14)
【0094】
式(14)は、右辺の演算を実行して、演算結果を新たなsとして更新することを表している。なお、式(14)において、Tは転置行列を表し、行列Bは、次式(15)である。また、行列Bは、行列Aの成分を、元のxyz方向の成分に座標系を変換する役割をしている。
【0095】
【数6】
【0096】
(ステップS208)軌道予測演算部155は、推定パラメータsが収束したか否かを判別する。
推定パラメータsが収束したと判別した場合(ステップS208;Yes)、ステップS209に進む。推定パラメータの1つの成分sが収束していないと判別した場合(ステップS208;No)、ステップS201’に戻る。
(ステップS209)軌道予測演算部155は、この推定パラメータの1つの成分sを使用し、将来の衛星位置peを軌道計算する。
軌道予測演算部155は、第1実施形態と同様に軌道計算を行う。
【0097】
以上のように、第2実施形態によれば、第1実施形態と比較して、推定パラメータの成分の内、2つについて固定値を用いたため、パラメータを推定する際に最小二乗法で用いる行列が小さくなる。このように最小二乗法で用いる行列を小さくできた結果、本実施形態の軌道予測装置10では、演算に用いる必要メモリの容量が小さくて済み、さらに演算時間を短くできる効果がある。演算に必要なメモリ容量を少なくすることができたので、本実施形態の軌道予測装置10を用いた測位装置1では、コストダウンを実現できる。また、演算時間を短くできることにより、測位装置1の電源をオフ状態からオン状態にしたような場合、従来技術より早く起動後に位置測定を開始できるので、本実施形態の軌道予測装置10では、利用者にとって利便性が増すため、利用者の使用頻度が向上する効果もある。
また、第2実施形態によれば、第1実施形態と比較して、さらに推定パラメータにおける未知数が少なくなるので、本実施形態の軌道予測装置10では、必要な観測方程式の数を減らせる効果もある。この結果、少数のエフェメリス・データを用いて、軌道予測を行うことが可能になるので、従来技術と比較して、本実施形態の軌道予測装置10では、利用者にとって利便性が増すため、利用者の使用頻度が向上する効果もある。
【0098】
なお、本実施形態では、3日分の位置速度情報を衛星位置・速度記憶部140に記憶させる例を説明したが、本実施形態の軌道予測装置10を用いる測位装置1の使用目的に応じて、記憶させる期間を3日より多くしても3日より少なくしてもよい。また、エフェメリス・データを記憶するタイミングとして2時間間隔の例を説明したが、測位装置1の用途に応じて、エフェメリス取得部130は、GPS衛星2から送信されたエフェメリス・データを2時間毎に受信し、受信した後に、4時間間隔に記憶させるようにして間引くようにしてもいい。また、衛星位置・速度記憶部140に記憶させる位置速度情報が10個の例を説明したが、測位装置1の用途に応じて、10個以上であってもよい。
【符号の説明】
【0099】
1・・・測位装置、2・・・GPS衛星、10・・・軌道予測装置、20・・・測位算出部、110・・・情報取得部、115・・・記憶部、120・・・アルマナック取得部、125・・・衛星型抽出部、130・・・エフェメリス取得部、135・・・衛星位置速度算出部、140・・・衛星位置・速度記憶部、145・・・演算開始判定部、150・・・パラメータ推定部、155・・・軌道予測演算部、160・・・予測結果記憶部
【特許請求の範囲】
【請求項1】
測位衛星からの信号を受信して受信データを取得する情報取得部と、
前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、
軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、
前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、
を備えることを特徴とする軌道予測装置。
【請求項2】
前記推定パラメータ部は、
前記測位衛星の半径方向と進行方向及び軌道面垂直方向との成分による座標系に変換する行列を用いて前記推定パラメータを推定する
ことを特徴とする請求項1に記載の軌道予測装置。
【請求項3】
前記推定パラメータ部は、
前記測位衛星の位置の進行方向成分に対して予め算出された値を用い、前記測位衛星の速度の軌道面垂直方向成分に対して予め算出された値を用い、前記推定パラメータを推定する
ことを特徴とする請求項1または請求項2に記載の軌道予測装置。
【請求項4】
前記推定パラメータ部は、
前記測位衛星に対する太陽輻射圧のワイバイアスとスケール係数とに対して各々予め算出した値を用い、前記推定パラメータを推定する
ことを特徴とする請求項1から請求項3のいずれか1項に記載の軌道予測装置。
【請求項5】
軌道予測装置における軌道予測方法であって、
情報取得部が、測位衛星からの信号を受信して受信データを取得する情報取得過程と、
衛星位置速度算出部が、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出過程と、
推定パラメータ部が、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽輻射圧の影響を示す値及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ過程と、
軌道予測部が、前記推定パラメータ手順で推定された前記推定パラメータを用いて前記測位衛星の位置を推定する軌道予測過程と、
を含むことを特徴とする軌道予測方法。
【請求項1】
測位衛星からの信号を受信して受信データを取得する情報取得部と、
前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出部と、
軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽から前記測位衛星への光の圧力である太陽輻射圧の影響を示す値、及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ部と、
前記推定パラメータ部で推定された推定パラメータを用いて前記測位衛星の位置を推定する軌道予測部と、
を備えることを特徴とする軌道予測装置。
【請求項2】
前記推定パラメータ部は、
前記測位衛星の半径方向と進行方向及び軌道面垂直方向との成分による座標系に変換する行列を用いて前記推定パラメータを推定する
ことを特徴とする請求項1に記載の軌道予測装置。
【請求項3】
前記推定パラメータ部は、
前記測位衛星の位置の進行方向成分に対して予め算出された値を用い、前記測位衛星の速度の軌道面垂直方向成分に対して予め算出された値を用い、前記推定パラメータを推定する
ことを特徴とする請求項1または請求項2に記載の軌道予測装置。
【請求項4】
前記推定パラメータ部は、
前記測位衛星に対する太陽輻射圧のワイバイアスとスケール係数とに対して各々予め算出した値を用い、前記推定パラメータを推定する
ことを特徴とする請求項1から請求項3のいずれか1項に記載の軌道予測装置。
【請求項5】
軌道予測装置における軌道予測方法であって、
情報取得部が、測位衛星からの信号を受信して受信データを取得する情報取得過程と、
衛星位置速度算出部が、前記受信データに基づいて、前記測位衛星の位置と前記測位衛星の速度である位置速度情報を算出する衛星位置速度算出過程と、
推定パラメータ部が、軌道における前記測位衛星の半径方向、進行方向及び軌道面垂直方向の各単位ベクトルと、前記位置速度情報とを用いて、前記測位衛星の位置と、前記測位衛星の速度と、太陽輻射圧の影響を示す値及び地球自転の影響を示す値とを含む推定パラメータを算出する推定パラメータ過程と、
軌道予測部が、前記推定パラメータ手順で推定された前記推定パラメータを用いて前記測位衛星の位置を推定する軌道予測過程と、
を含むことを特徴とする軌道予測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−3093(P2013−3093A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−137326(P2011−137326)
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月21日(2011.6.21)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]