
軌道推定装置および軌道推定方法
【課題】軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得る。
【解決手段】複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部30と、収束演算部30で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部40とを備えた軌道推定装置において、収束演算部30は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する。
【解決手段】複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部30と、収束演算部30で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部40とを備えた軌道推定装置において、収束演算部30は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の移動体の軌道を推定する軌道推定装置および軌道推定方法に関し、特に、複数の移動体として複数の衛星を対象とした軌道推定装置および軌道推定方法に関する。
【背景技術】
【0002】
従来の軌道推定方法として、2機の衛星を介して得られる同一電波の到来時間差(TDOA:Time Difference of Arrival)およびドップラー周波数差(FDOA:Frequency Difference of Arrival)の情報により、2機の衛星の軌道を推定する方式がある(例えば、非特許文献1参照)。
【0003】
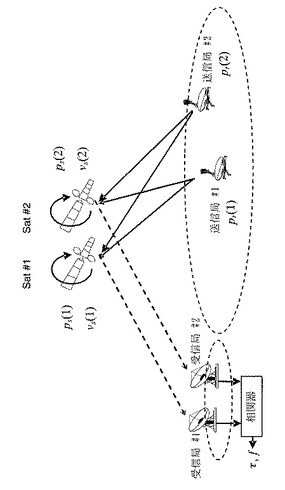
まず、ここで使用するTDOAおよびFDOAについて簡単に説明する。図5は、TDOAおよびFDOAの概要図である。図5に示す地上の2送信局#1、#2から2衛星(Sat#1、#2)へ同時に電波を送信する。一般には、ある衛星へ電波を送信すると、サイドローブにより、隣接する衛星でも電波が受信されるため、これを使用する。各衛星は、衛星内のトランスポンダを介して、地上へ電波を送信する。
【0004】
各衛星には、衛星からの電波を受信する地球局があり、各衛星からの電波を各地球局で受信する。各送信局から2機の衛星を介して受信した同一電波は、伝播経路が異なるため、2受信信号の間には到来時間差が生じる。また、周波数についても、2機の衛星は、ある速度で動いているため、各送信局から2機の衛星を介して受信した同一電波の間にはドップラー周波数差が生じる。
【0005】
相関器により2受信信号を相関処理することにより、この2受信信号に含まれる情報を求めることができる。遅延時間差τおよびドップラー周波数差fは、これらの到来時間差およびドップラー周波数差の2送信局間の差である。遅延時間差τおよびドップラー周波数差fは、2機の衛星の3次元位置ps(i)、および速度ベクトルvs(i)(i=1、2)および送信局の3次元位置ベクトルpr(j)(j=1、2)の情報を用いて、次式(1)、(2)で表すことができる。なお、下式において、cは光速、λは送信波長である。
【0006】
【数1】

【0007】
上式(1)の右辺第1項は、送信局#1から2衛星を介して得られる同一電波の到来時間差を表し、第2項は、送信局#2から2衛星を介して得られる同一電波の到来時間差を表している。そして、上式(1)全体として、2送信局間の到来時間差の差を表している。
【0008】
同様に、上式(2)の右辺第1項は、送信局#1から2衛星を介して得えられる同一電波のドップラー周波数差を表し、第2項は、送信局#2から2衛星を介して得えられる同一電波のドップラー周波数差を表している。そして、上式(2)全体として、2送信局間のドップラー周波数差の差を表している。
【0009】
なお、2局の送信周波数は、異なるのが普通であるが、式が複雑になる。このため、表記を簡単にするため、上式(2)においては、2局の送信周波数を同一と仮定しているが、異なる場合への拡張は容易であり、ここでは省略する。
【0010】
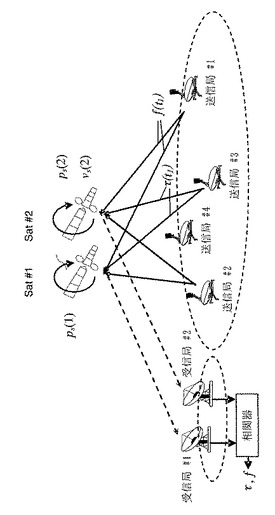
図6は、従来の軌道推定方式の概念図である。従来方式では、まず、複数局の既知位置送信局を用意する。そして、順次、これらの複数局の中から2局を選択し、同時送信を行い、上述した方法により、到来時間差およびドップラー周波数差値を得る。
【0011】
時刻tkの送信時に使用する2局の送信局のうち、第1送信局の3次元位置ベクトルをpr(1、tk)と呼び、第2送信局をpr(2、tk)と呼ぶ。例えば、図6を例にとると、時刻t1に送信局#1および#3を使用する場合、これらの送信局に対応するそれぞれの3次元位置ベクトルが、pr(1、tk)およびpr(2、tk)である。1送信毎に、下式(3)〜(6)により、到来時間差およびドップラー周波数差に関する方程式を立てることができる。
【0012】
【数2】
【0013】
ここで、ξ(i)は、衛星#iの軌道決定パラメータであるケプラリアン軌道6要素を格納したベクトルであり、各要素は、それぞれ、M:平均近点離角、e:離心率、A:軌道長半径、ω:近地点引数、Ω:昇交点赤径、io:軌道傾斜角、である。時刻tkにおける衛星の3次元位置ps(i、tk)および速度vs(i、tk)は、ケプラリアン軌道6要素ξ(i)で一意に決定される。
【0014】
従って、衛星の3次元位置および速度は、ケプラリアン軌道6要素の関数であり、同様に、到来時間差およびドップラー周波数差もケプラリアン軌道6要素の関数である。そこで、式(3)および式(4)の左辺では、ξの関数として表記している。
【0015】
各送信タイミングtkで任意の送信局ペアを用いることで、上式(3)、(4)を得る。この送信を複数回繰り返すことにより、複数の方程式を得ることができる。最後に、これらの連立方程式を、軌道を決定する未知パラメータξについて解くことで解を得る。なお、衛星の軌道決定を行うξは、12個の未知パラメータを含んでいるため、6回以上の観測により12式以上の方程式を立てれば、解を得ることができる。以下、この方程式の解法を説明する。
【0016】
時刻tkにおける到来時間差およびドップラー周波数差の観測値をそれぞれτ0(tk)、f0(tk)とおく。Kを観測回数、τ(ξ、tk)、f(ξ、tk)を、それぞれ式(3)および式(4)に示した数学モデルとし、推定問題を下式(7)、(8)のように定式化する。
【0017】
【数3】
【0018】
ここで、Vは、重み付け行列である。上式(8)は、上式(7)の評価関数を2機の衛星のケプラリアン軌道6要素ξについて最小化する最小二乗問題である。この問題は、収束演算により解を計算することができる。詳細は、従来文献に記載されているため、詳細説明を省略するが、下式(9)、(10)の収束演算により、解を計算する。
【0019】
【数4】
【0020】
ここで、G(ξ、tk)は、ケプラリアン軌道6要素により、τ(ξ、tk)およびf(ξ、tk)を偏微分した偏微分行列G(ξ、tk)であり、下式(11)で定義される。
【0021】
【数5】
【0022】
また、▽ξは、ξに関する偏微分作用素である。上式(9)、(10)の収束演算により、最適なケプラリアン軌道6要素を推定することができる。なお、収束判定条件は、例えば、下式(12)の様に、収束演算回数itrが最大許容回数itrmaxに達するか、評価関数値f(ξ(^))の前回の演算結果fp(ξ(^))からの変動が、ある閾値ε以下となった場合とする(ここで、ξ(^)という表記は、ξの上部に^が付いたことを意味している)。また、εは、設定パラメータである。
【0023】
【数6】
【0024】
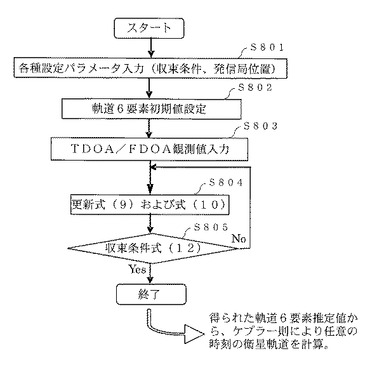
図7は、従来の軌道推定装置の構成図である。図7における従来の軌道推定装置は、設定パラメータ入力部110、軌道推定初期値設定部120、収束演算部130、および収束判定部140で構成される。また、図8は、従来の軌道推定方式における処理フローチャートである。これら図7、図8を用いて上述した従来技術の一連の処理の流れを整理すると、次のようになる。
【0025】
まず始めに、設定パラメータ入力部110は、収束条件、発信局位置に関する各種パラメータを入力設定する(ステップS801)。次に、軌道推定初期値設定部120は、軌道6要素の初期値を入力設定する(ステップS802)。
【0026】
そして、収束演算部130は、TDOA/FDOA観測値を入力し(ステップS803)、設定パラメータ入力部110で設定されたパラメータ、および軌道推定初期値設定部120で設定された初期値に基づいて、上式(9)、(10)の収束演算を行うことにより、最適なケプラリアン軌道6要素を推定する(ステップS804)。
【0027】
収束判定部140は、上述した収束条件式(12)により、収束演算部130による演算結果の収束判定を行う(S405)。そして、収束条件を満たすまで、ステップS804、S405の処理を繰り返す。そして、ステップS805において収束したと判定された場合には、最終的に得られた軌道6要素推定値から、ケプラー則により任意の時刻の衛星軌道を計算することができる。
【0028】
【非特許文献1】学会予稿「網嶋他、”複数のアップリンク波のTDOA/FDOAによる衛星軌道推定方式、” 2006年電子情報通信学会ソサイアティ大会」
【発明の開示】
【発明が解決しようとする課題】
【0029】
しかしながら、従来技術には次のような課題がある。
従来方式における推定精度は、リファレンス局数、リファレンス局の配置、観測時間等の条件に依存する。例えば、リファレンス局数が多い程、リファレンス局が互いに離れている程、また、観測時間が長い程、高い精度を得ることができる。従って、これらのような条件を満たさない場合には、推定精度が必ずしも十分でない問題があった。
【0030】
また、軌道推定の解法に収束演算を用いているが、時折、最適解に収束せず、その代わりに、局所解に陥ってしまい、最適解を得ることができない問題があった。さらに、得られた解が最適解か局所解かを判定することができなかった。
【0031】
本発明は上述のような課題を解決するためになされたもので、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置および軌道推定方法を得ることを目的とする。
【課題を解決するための手段】
【0032】
本発明に係る軌道推定装置は、複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部と、収束演算部で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部とを備えた軌道推定装置において、収束演算部は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定するものである。
【0033】
また、本発明に係る軌道推定方法は、複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算ステップと、収束演算ステップで収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定ステップとを備えた軌道推定方法において、収束演算ステップは、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定するものである。
【発明の効果】
【0034】
本発明によれば、従来方法に対して、地球監視局による衛星の角度観測情報を併用した評価関数を用いて軌道決定パラメータの最適解を求めることにより、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置および軌道推定方法を得ることができる。
【発明を実施するための最良の形態】
【0035】
以下、本発明の軌道推定装置の好適な実施の形態につき図面を用いて説明する。
本発明の軌道推定装置は、到来時間差とドップラー周波数差情報により衛星の軌道を推定する際に、地球監視局による衛星の角度観測情報を併用することを技術的特徴とするものである。
【0036】
実施の形態1.
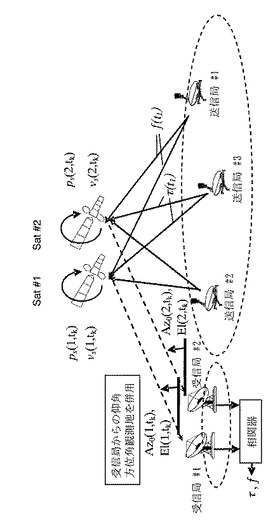
図1は、本発明の実施の形態1における軌道推定方法の概念図である。図1に示すように、衛星の監視を行う地球監視局のアンテナは、衛星からの電波を受信すべく、アンテナ面を衛星方向へ向ける必要がある。このため、常時、アンテナから見た衛星の方角を観測している。そこで、この角度観測値を、従来のTDOAおよびFDOAによる軌道推定方法に併用する方法について説明する。
【0037】
時刻tkにおける各衛星の仰角の観測値をAz0(i、tk)、方位角観測値をEl0(i、tk)とし、それぞれの数学モデルをAz(ξ(i)、tk)、El(ξ(i)、tk)とする。このとき、TDOA/FDOAによる軌道推定方式に測角情報を併用するため、下式(13)〜(15)の最小二乗問題に帰着させる。
【0038】
【数7】
【0039】
ここで、f(ξ)は、すでに説明した式(7)であり、αは、0≦α≦1の実数値を持つ設定パラメータである。αが1に近い程、TDOA/FDOA観測値に重きを置き、αが0に近い程、仰角および方位角に重きを置く最適問題となる。この最小二乗問題は、TDOA/FDOAのときと同様、収束演算により解を計算することができる。詳細は省略するが、下式(16)、(17)の収束演算により、解を計算する。
【0040】
【数8】
【0041】
ここで、Wiは、重み付け行列であり、H(ξ(i)、tk)は、衛星#iのケプラリアン軌道6要素ξ(i)によりAz(ξ(i)、tk)およびEl(ξ(i)、tk)を偏微分した偏微分行列であり、下式(18)〜(20)で定義される。
【0042】
【数9】
【0043】
ここで、▽ξ(i)は、ξ(i)に関する偏微分作用素である。上式(16)、(17)の収束演算により、最適なケプラリアン軌道6要素を推定することができる。なお、収束判定条件は、例えば、下式(21)の様に、収束演算回数itrが最大許容回数itrmaxに達するか、評価関数値h(ξ(^))の前回の演算結果hp(ξ(^))からの変動が、ある閾値ε以下となった場合とする。また、εは設定パラメータである。
【0044】
【数10】
【0045】
このようにして、TDOA/FDOAによる軌道推定方式において、同一電波の到来時間差およびドップラー周波数差である第1の情報に加え、複数の衛星の角度観測情報(測角情報)を第2の情報として併用することができる。
【0046】
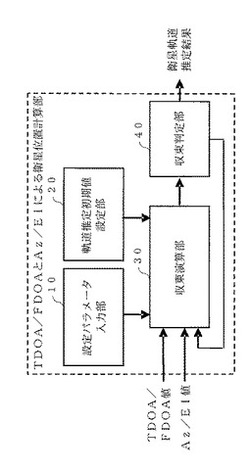
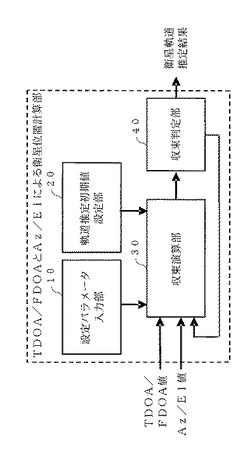
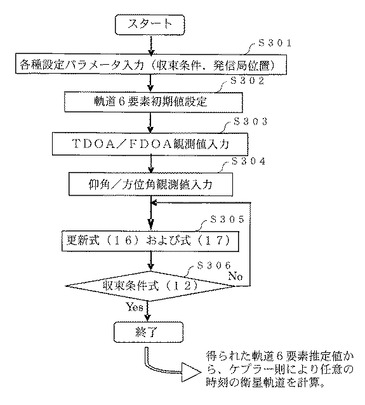
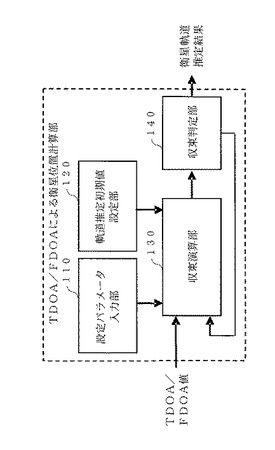
図2は、本発明の実施の形態1における軌道推定装置の構成図である。図2における本実施の形態1の軌道推定装置は、設定パラメータ入力部10、軌道推定初期値設定部20、収束演算部30、および収束判定部40で構成される。また、図3は、本発明の実施の形態1の軌道推定方式における処理フローチャートである。これら図2、図3を用いて、上述した本実施の形態1における軌道推定の一連の処理の流れを整理すると、次のようになる。
【0047】
まず始めに、設定パラメータ入力部10は、収束条件、発信局位置に関する各種パラメータを入力設定する(ステップS301)。次に、軌道推定初期値設定部20は、軌道6要素の初期値を入力設定する(ステップS302)。
【0048】
そして、収束演算部30は、TDOA/FDOA観測値を入力するとともに(ステップS303)、仰角/方位角観測値をさらに入力する(ステップS304)。そして、収束演算部30は、これらの入力と、設定パラメータ入力部10で設定されたパラメータ、および軌道推定初期値設定部20で設定された初期値に基づいて、上式(16)、(17)の収束演算を行うことにより、最適なケプラリアン軌道6要素を推定する(ステップS305)。
【0049】
収束判定部40は、上述した収束条件式(21)により、収束演算部30による演算結果の収束判定を行う(ステップS306)。そして、収束条件を満たすまで、ステップS305、S306の処理を繰り返す。そして、ステップS306において収束したと判定された場合には、最終的に得られた軌道6要素推定値から、ケプラー則により任意の時刻の衛星軌道を計算することができる。
【0050】
以上のように、本実施の形態1によれば、TDOA/FDOAによる軌道推定方式に対して、仰角および方位角に関する測角情報を併用した最小二乗問題を適用して、軌道推定演算を行っている。これにより、重み付けαの設定に応じて、αが1に近い程、TDOA/FDOA観測値に重きを置き、αが0に近い程、仰角および方位角に重き、観測情報を加味した最適問題とすることができる。この結果、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得ることができる。
【0051】
なお、上述の説明では、衛星の軌道推定について説明したが、本実施の形態1における軌道推定装置および方法は、衛星に限らず任意の移動体の軌道推定に適用できることは言うまでもない。
【0052】
また、本方法は、2機の衛星に限らず、任意の数の移動体の任意の次元の軌道推定も可能である。移動体の数や空間の次元が増えると、それに伴う測位方程式を増やすようにリファレンス局数や観測値数を増やせばよい。なお、解法の導出は、上記の導出に沿って容易に拡張できるため、ここでは説明を省略する。
【0053】
また、ケプラリアン軌道6要素ではなく、ある時刻における衛星の位置速度を直接推定する方式も考えられる。この場合には、推定アルゴリズムの導出は、本発明の導出方法を用い、ケプラリアン軌道6要素の代わりに衛星の位置および速度について最小二乗問題を解けばよい。
【0054】
実施の形態2.
本実施の形態2では、TDOA/FDOA観測値による軌道推定方式により得られた推定結果が、局所解か最適解かを、推定結果から判定する方法について説明する。
【0055】
(1)角度情報を用いた判定
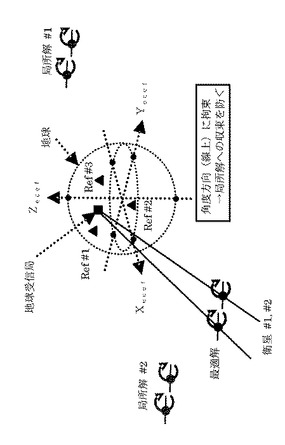
ここでは、角度情報を用いた判定方法を説明する。図4は、本実施の形態2における局所解と最適解の判別方法の概念図である。まず、軌道推定結果に基づいて地上局からの衛星の見かけの角度を計算する。そして、この計算結果が仰角および方位角の観測値と大きく異なる場合には、局所解と見なす事ができる。例えば、下式(22)、(23)の判定式を適用することが考えられる。
【0056】
【数11】
【0057】
ここで、Az0(i、tk)およびEl(i、tk)は、それぞれ方位および仰角の観測値であり、Az(ξ(^)(i)、tk)およびEl(ξ(^)(i)、tk)は、それぞれ軌道推定結果から求めた方位および仰角の計算値である。上式中、‖●‖は、ノルムである。また、εは、閾値設定パラメータであり、判定基準を厳しくする場合には小さく設定し、緩くする場合には大きく設定する。また、Tは、評価対象としたい軌道の計算時刻である。
【0058】
さらに、角度運動幅に対し、判定基準を考えることもできる。静止衛星のみかけの角度運動は、非常に小さい。このため、衛星のみかけ角度運動が著しく大きい場合には、推定結果は、静止衛星ではないと判断でき、局所解へ収束したと判定する。例えば、推定結果から衛星の角度値を計算し、その最大値と最小値との差を運動幅とし、下式(24)、(25)の判別式を用いることができる。
【0059】
【数12】
【0060】
さらに、衛星のみかけの角速度も考えることができる。静止衛星のみかけの角速度は、小さい。このため、衛星の角速度が著しく大きい場合には、静止衛星ではないと判断でき、局所解へ収束したと判定する。例えば、推定結果から衛星の仰角および方位角の速度A(・)z(ξ(^)(i)、tk)およびEl(・)z(ξ(^)(i)、tk)を計算し、下式(26)、(27)の判別式で判定することができる(ここで、(・)という表記は、その前の記号の上部に・が付くことを意味している)。
【0061】
【数13】
【0062】
(2)経度および緯度情報を用いた判定
ここでは、緯度、経度情報を用いた判定方法を説明する。静止衛星は、衛星運用会社により軌道管理されており、そのおおまかな緯度、経度は、一般公開されている。このため、推定結果から各衛星の経度および緯度を計算し、その値が、衛星運用会社による公表値などから著しく逸脱している場合には、正しい解と言えないため、局所解と見なすことができる。例えば、下式(28)、(29)の判別式が考えられる。
【0063】
【数14】
【0064】
ここで、Lon0(i)、Lat0(i)は、事前に得られる衛星のおおまかな経度および緯度情報であり、Lon(ξ(^)(i)、tk)、Lat(ξ(^)(i)、tk)は、軌道推定結果から計算した経度および緯度の値である。
【0065】
さらに、角度情報を用いたときと同様に、緯度、経度の運動幅と速度について、判定基準を設定することもできる。これは、上式(24)〜(27)の軌道推定値から仰角および方位角を計算する代わりに、緯度、経度およびそれらの速度を計算し、判定材料として使用すればよい。
【0066】
(3)3次元位置および速度の推定値情報を用いた判定
ここでは、衛星の3次元位置および速度情報を用いた判定方法を説明する。静止衛星は、みかけの3次元位置の動きが小さく、速度も最大数m/sと小さい。従って、このような値を著しく超える運動幅や速度をもつ軌道は、静止衛星ではないため、局所解と見なすことができる。
【0067】
よって、仰角および方位角情報、緯度および経度情報を用いたときと同様に、衛星の3次元の運動幅と速度について、判定基準を設定することができる。これは、上式(24)〜(27)で推定結果から仰角方位角を計算する代わりに、3次元の位置および速度を計算し、判定材料として使用すればよい。
【0068】
上述した(1)〜(3)の判定基準の中のいずれかを用いる、または複数を併用することにより、基準を満たさない軌道値の場合には、ユーザに警告を出すなどの処理を行い、必要であれば、再度、異なる初期値を与えるなどして推定アルゴリズム実行し、最適解を得るまで演算を繰り返せば、最終的に、最適解を得ることができる。
【0069】
以上のように、実施の形態2によれば、角度情報、経度および緯度情報、3次元位置および速度の推定値情報の少なくとも1つの情報に基づいて、軌道推定方式により得られた推定結果が、局所解か最適解かを容易に判定することができる。さらに、必要に応じて、再度、異なる初期値を与えるなどして推定アルゴリズム実行することにより、最終的に、最適解を得ることができる。
【図面の簡単な説明】
【0070】
【図1】本発明の実施の形態1における軌道推定方法の概念図である。
【図2】本発明の実施の形態1における軌道推定装置の構成図である。
【図3】本発明の実施の形態1の軌道推定方式における処理フローチャートである。
【図4】本実施の形態2における局所解と最適解の判別方法の概念図である。
【図5】TDOAおよびFDOAの概要図である。
【図6】従来の軌道推定方式の概念図である。
【図7】従来の軌道推定装置の構成図である。
【図8】従来の軌道推定方式における処理フローチャートである。
【符号の説明】
【0071】
10 設定パラメータ入力部、20 軌道推定初期値設定部、30 収束演算部、40 収束判定部。
【技術分野】
【0001】
本発明は、複数の移動体の軌道を推定する軌道推定装置および軌道推定方法に関し、特に、複数の移動体として複数の衛星を対象とした軌道推定装置および軌道推定方法に関する。
【背景技術】
【0002】
従来の軌道推定方法として、2機の衛星を介して得られる同一電波の到来時間差(TDOA:Time Difference of Arrival)およびドップラー周波数差(FDOA:Frequency Difference of Arrival)の情報により、2機の衛星の軌道を推定する方式がある(例えば、非特許文献1参照)。
【0003】
まず、ここで使用するTDOAおよびFDOAについて簡単に説明する。図5は、TDOAおよびFDOAの概要図である。図5に示す地上の2送信局#1、#2から2衛星(Sat#1、#2)へ同時に電波を送信する。一般には、ある衛星へ電波を送信すると、サイドローブにより、隣接する衛星でも電波が受信されるため、これを使用する。各衛星は、衛星内のトランスポンダを介して、地上へ電波を送信する。
【0004】
各衛星には、衛星からの電波を受信する地球局があり、各衛星からの電波を各地球局で受信する。各送信局から2機の衛星を介して受信した同一電波は、伝播経路が異なるため、2受信信号の間には到来時間差が生じる。また、周波数についても、2機の衛星は、ある速度で動いているため、各送信局から2機の衛星を介して受信した同一電波の間にはドップラー周波数差が生じる。
【0005】
相関器により2受信信号を相関処理することにより、この2受信信号に含まれる情報を求めることができる。遅延時間差τおよびドップラー周波数差fは、これらの到来時間差およびドップラー周波数差の2送信局間の差である。遅延時間差τおよびドップラー周波数差fは、2機の衛星の3次元位置ps(i)、および速度ベクトルvs(i)(i=1、2)および送信局の3次元位置ベクトルpr(j)(j=1、2)の情報を用いて、次式(1)、(2)で表すことができる。なお、下式において、cは光速、λは送信波長である。
【0006】
【数1】
【0007】
上式(1)の右辺第1項は、送信局#1から2衛星を介して得られる同一電波の到来時間差を表し、第2項は、送信局#2から2衛星を介して得られる同一電波の到来時間差を表している。そして、上式(1)全体として、2送信局間の到来時間差の差を表している。
【0008】
同様に、上式(2)の右辺第1項は、送信局#1から2衛星を介して得えられる同一電波のドップラー周波数差を表し、第2項は、送信局#2から2衛星を介して得えられる同一電波のドップラー周波数差を表している。そして、上式(2)全体として、2送信局間のドップラー周波数差の差を表している。
【0009】
なお、2局の送信周波数は、異なるのが普通であるが、式が複雑になる。このため、表記を簡単にするため、上式(2)においては、2局の送信周波数を同一と仮定しているが、異なる場合への拡張は容易であり、ここでは省略する。
【0010】
図6は、従来の軌道推定方式の概念図である。従来方式では、まず、複数局の既知位置送信局を用意する。そして、順次、これらの複数局の中から2局を選択し、同時送信を行い、上述した方法により、到来時間差およびドップラー周波数差値を得る。
【0011】
時刻tkの送信時に使用する2局の送信局のうち、第1送信局の3次元位置ベクトルをpr(1、tk)と呼び、第2送信局をpr(2、tk)と呼ぶ。例えば、図6を例にとると、時刻t1に送信局#1および#3を使用する場合、これらの送信局に対応するそれぞれの3次元位置ベクトルが、pr(1、tk)およびpr(2、tk)である。1送信毎に、下式(3)〜(6)により、到来時間差およびドップラー周波数差に関する方程式を立てることができる。
【0012】
【数2】
【0013】
ここで、ξ(i)は、衛星#iの軌道決定パラメータであるケプラリアン軌道6要素を格納したベクトルであり、各要素は、それぞれ、M:平均近点離角、e:離心率、A:軌道長半径、ω:近地点引数、Ω:昇交点赤径、io:軌道傾斜角、である。時刻tkにおける衛星の3次元位置ps(i、tk)および速度vs(i、tk)は、ケプラリアン軌道6要素ξ(i)で一意に決定される。
【0014】
従って、衛星の3次元位置および速度は、ケプラリアン軌道6要素の関数であり、同様に、到来時間差およびドップラー周波数差もケプラリアン軌道6要素の関数である。そこで、式(3)および式(4)の左辺では、ξの関数として表記している。
【0015】
各送信タイミングtkで任意の送信局ペアを用いることで、上式(3)、(4)を得る。この送信を複数回繰り返すことにより、複数の方程式を得ることができる。最後に、これらの連立方程式を、軌道を決定する未知パラメータξについて解くことで解を得る。なお、衛星の軌道決定を行うξは、12個の未知パラメータを含んでいるため、6回以上の観測により12式以上の方程式を立てれば、解を得ることができる。以下、この方程式の解法を説明する。
【0016】
時刻tkにおける到来時間差およびドップラー周波数差の観測値をそれぞれτ0(tk)、f0(tk)とおく。Kを観測回数、τ(ξ、tk)、f(ξ、tk)を、それぞれ式(3)および式(4)に示した数学モデルとし、推定問題を下式(7)、(8)のように定式化する。
【0017】
【数3】
【0018】
ここで、Vは、重み付け行列である。上式(8)は、上式(7)の評価関数を2機の衛星のケプラリアン軌道6要素ξについて最小化する最小二乗問題である。この問題は、収束演算により解を計算することができる。詳細は、従来文献に記載されているため、詳細説明を省略するが、下式(9)、(10)の収束演算により、解を計算する。
【0019】
【数4】
【0020】
ここで、G(ξ、tk)は、ケプラリアン軌道6要素により、τ(ξ、tk)およびf(ξ、tk)を偏微分した偏微分行列G(ξ、tk)であり、下式(11)で定義される。
【0021】
【数5】
【0022】
また、▽ξは、ξに関する偏微分作用素である。上式(9)、(10)の収束演算により、最適なケプラリアン軌道6要素を推定することができる。なお、収束判定条件は、例えば、下式(12)の様に、収束演算回数itrが最大許容回数itrmaxに達するか、評価関数値f(ξ(^))の前回の演算結果fp(ξ(^))からの変動が、ある閾値ε以下となった場合とする(ここで、ξ(^)という表記は、ξの上部に^が付いたことを意味している)。また、εは、設定パラメータである。
【0023】
【数6】
【0024】
図7は、従来の軌道推定装置の構成図である。図7における従来の軌道推定装置は、設定パラメータ入力部110、軌道推定初期値設定部120、収束演算部130、および収束判定部140で構成される。また、図8は、従来の軌道推定方式における処理フローチャートである。これら図7、図8を用いて上述した従来技術の一連の処理の流れを整理すると、次のようになる。
【0025】
まず始めに、設定パラメータ入力部110は、収束条件、発信局位置に関する各種パラメータを入力設定する(ステップS801)。次に、軌道推定初期値設定部120は、軌道6要素の初期値を入力設定する(ステップS802)。
【0026】
そして、収束演算部130は、TDOA/FDOA観測値を入力し(ステップS803)、設定パラメータ入力部110で設定されたパラメータ、および軌道推定初期値設定部120で設定された初期値に基づいて、上式(9)、(10)の収束演算を行うことにより、最適なケプラリアン軌道6要素を推定する(ステップS804)。
【0027】
収束判定部140は、上述した収束条件式(12)により、収束演算部130による演算結果の収束判定を行う(S405)。そして、収束条件を満たすまで、ステップS804、S405の処理を繰り返す。そして、ステップS805において収束したと判定された場合には、最終的に得られた軌道6要素推定値から、ケプラー則により任意の時刻の衛星軌道を計算することができる。
【0028】
【非特許文献1】学会予稿「網嶋他、”複数のアップリンク波のTDOA/FDOAによる衛星軌道推定方式、” 2006年電子情報通信学会ソサイアティ大会」
【発明の開示】
【発明が解決しようとする課題】
【0029】
しかしながら、従来技術には次のような課題がある。
従来方式における推定精度は、リファレンス局数、リファレンス局の配置、観測時間等の条件に依存する。例えば、リファレンス局数が多い程、リファレンス局が互いに離れている程、また、観測時間が長い程、高い精度を得ることができる。従って、これらのような条件を満たさない場合には、推定精度が必ずしも十分でない問題があった。
【0030】
また、軌道推定の解法に収束演算を用いているが、時折、最適解に収束せず、その代わりに、局所解に陥ってしまい、最適解を得ることができない問題があった。さらに、得られた解が最適解か局所解かを判定することができなかった。
【0031】
本発明は上述のような課題を解決するためになされたもので、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置および軌道推定方法を得ることを目的とする。
【課題を解決するための手段】
【0032】
本発明に係る軌道推定装置は、複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算部と、収束演算部で収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定部とを備えた軌道推定装置において、収束演算部は、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定するものである。
【0033】
また、本発明に係る軌道推定方法は、複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび第1の情報を含む評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定する収束演算ステップと、収束演算ステップで収束演算されることにより推定された軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、軌道決定パラメータの解を最適解と判定する収束判定ステップとを備えた軌道推定方法において、収束演算ステップは、複数の移動体の角度観測情報を第2の情報としてさらに入力し、軌道決定パラメータおよび第1の情報に加え第2の情報も加味した評価関数を最小化するように収束演算を行い、軌道決定パラメータの解を推定するものである。
【発明の効果】
【0034】
本発明によれば、従来方法に対して、地球監視局による衛星の角度観測情報を併用した評価関数を用いて軌道決定パラメータの最適解を求めることにより、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置および軌道推定方法を得ることができる。
【発明を実施するための最良の形態】
【0035】
以下、本発明の軌道推定装置の好適な実施の形態につき図面を用いて説明する。
本発明の軌道推定装置は、到来時間差とドップラー周波数差情報により衛星の軌道を推定する際に、地球監視局による衛星の角度観測情報を併用することを技術的特徴とするものである。
【0036】
実施の形態1.
図1は、本発明の実施の形態1における軌道推定方法の概念図である。図1に示すように、衛星の監視を行う地球監視局のアンテナは、衛星からの電波を受信すべく、アンテナ面を衛星方向へ向ける必要がある。このため、常時、アンテナから見た衛星の方角を観測している。そこで、この角度観測値を、従来のTDOAおよびFDOAによる軌道推定方法に併用する方法について説明する。
【0037】
時刻tkにおける各衛星の仰角の観測値をAz0(i、tk)、方位角観測値をEl0(i、tk)とし、それぞれの数学モデルをAz(ξ(i)、tk)、El(ξ(i)、tk)とする。このとき、TDOA/FDOAによる軌道推定方式に測角情報を併用するため、下式(13)〜(15)の最小二乗問題に帰着させる。
【0038】
【数7】
【0039】
ここで、f(ξ)は、すでに説明した式(7)であり、αは、0≦α≦1の実数値を持つ設定パラメータである。αが1に近い程、TDOA/FDOA観測値に重きを置き、αが0に近い程、仰角および方位角に重きを置く最適問題となる。この最小二乗問題は、TDOA/FDOAのときと同様、収束演算により解を計算することができる。詳細は省略するが、下式(16)、(17)の収束演算により、解を計算する。
【0040】
【数8】
【0041】
ここで、Wiは、重み付け行列であり、H(ξ(i)、tk)は、衛星#iのケプラリアン軌道6要素ξ(i)によりAz(ξ(i)、tk)およびEl(ξ(i)、tk)を偏微分した偏微分行列であり、下式(18)〜(20)で定義される。
【0042】
【数9】
【0043】
ここで、▽ξ(i)は、ξ(i)に関する偏微分作用素である。上式(16)、(17)の収束演算により、最適なケプラリアン軌道6要素を推定することができる。なお、収束判定条件は、例えば、下式(21)の様に、収束演算回数itrが最大許容回数itrmaxに達するか、評価関数値h(ξ(^))の前回の演算結果hp(ξ(^))からの変動が、ある閾値ε以下となった場合とする。また、εは設定パラメータである。
【0044】
【数10】
【0045】
このようにして、TDOA/FDOAによる軌道推定方式において、同一電波の到来時間差およびドップラー周波数差である第1の情報に加え、複数の衛星の角度観測情報(測角情報)を第2の情報として併用することができる。
【0046】
図2は、本発明の実施の形態1における軌道推定装置の構成図である。図2における本実施の形態1の軌道推定装置は、設定パラメータ入力部10、軌道推定初期値設定部20、収束演算部30、および収束判定部40で構成される。また、図3は、本発明の実施の形態1の軌道推定方式における処理フローチャートである。これら図2、図3を用いて、上述した本実施の形態1における軌道推定の一連の処理の流れを整理すると、次のようになる。
【0047】
まず始めに、設定パラメータ入力部10は、収束条件、発信局位置に関する各種パラメータを入力設定する(ステップS301)。次に、軌道推定初期値設定部20は、軌道6要素の初期値を入力設定する(ステップS302)。
【0048】
そして、収束演算部30は、TDOA/FDOA観測値を入力するとともに(ステップS303)、仰角/方位角観測値をさらに入力する(ステップS304)。そして、収束演算部30は、これらの入力と、設定パラメータ入力部10で設定されたパラメータ、および軌道推定初期値設定部20で設定された初期値に基づいて、上式(16)、(17)の収束演算を行うことにより、最適なケプラリアン軌道6要素を推定する(ステップS305)。
【0049】
収束判定部40は、上述した収束条件式(21)により、収束演算部30による演算結果の収束判定を行う(ステップS306)。そして、収束条件を満たすまで、ステップS305、S306の処理を繰り返す。そして、ステップS306において収束したと判定された場合には、最終的に得られた軌道6要素推定値から、ケプラー則により任意の時刻の衛星軌道を計算することができる。
【0050】
以上のように、本実施の形態1によれば、TDOA/FDOAによる軌道推定方式に対して、仰角および方位角に関する測角情報を併用した最小二乗問題を適用して、軌道推定演算を行っている。これにより、重み付けαの設定に応じて、αが1に近い程、TDOA/FDOA観測値に重きを置き、αが0に近い程、仰角および方位角に重き、観測情報を加味した最適問題とすることができる。この結果、軌道推定精度の向上、および局所解への収束頻度の低減を図ることのできる軌道推定装置を得ることができる。
【0051】
なお、上述の説明では、衛星の軌道推定について説明したが、本実施の形態1における軌道推定装置および方法は、衛星に限らず任意の移動体の軌道推定に適用できることは言うまでもない。
【0052】
また、本方法は、2機の衛星に限らず、任意の数の移動体の任意の次元の軌道推定も可能である。移動体の数や空間の次元が増えると、それに伴う測位方程式を増やすようにリファレンス局数や観測値数を増やせばよい。なお、解法の導出は、上記の導出に沿って容易に拡張できるため、ここでは説明を省略する。
【0053】
また、ケプラリアン軌道6要素ではなく、ある時刻における衛星の位置速度を直接推定する方式も考えられる。この場合には、推定アルゴリズムの導出は、本発明の導出方法を用い、ケプラリアン軌道6要素の代わりに衛星の位置および速度について最小二乗問題を解けばよい。
【0054】
実施の形態2.
本実施の形態2では、TDOA/FDOA観測値による軌道推定方式により得られた推定結果が、局所解か最適解かを、推定結果から判定する方法について説明する。
【0055】
(1)角度情報を用いた判定
ここでは、角度情報を用いた判定方法を説明する。図4は、本実施の形態2における局所解と最適解の判別方法の概念図である。まず、軌道推定結果に基づいて地上局からの衛星の見かけの角度を計算する。そして、この計算結果が仰角および方位角の観測値と大きく異なる場合には、局所解と見なす事ができる。例えば、下式(22)、(23)の判定式を適用することが考えられる。
【0056】
【数11】
【0057】
ここで、Az0(i、tk)およびEl(i、tk)は、それぞれ方位および仰角の観測値であり、Az(ξ(^)(i)、tk)およびEl(ξ(^)(i)、tk)は、それぞれ軌道推定結果から求めた方位および仰角の計算値である。上式中、‖●‖は、ノルムである。また、εは、閾値設定パラメータであり、判定基準を厳しくする場合には小さく設定し、緩くする場合には大きく設定する。また、Tは、評価対象としたい軌道の計算時刻である。
【0058】
さらに、角度運動幅に対し、判定基準を考えることもできる。静止衛星のみかけの角度運動は、非常に小さい。このため、衛星のみかけ角度運動が著しく大きい場合には、推定結果は、静止衛星ではないと判断でき、局所解へ収束したと判定する。例えば、推定結果から衛星の角度値を計算し、その最大値と最小値との差を運動幅とし、下式(24)、(25)の判別式を用いることができる。
【0059】
【数12】
【0060】
さらに、衛星のみかけの角速度も考えることができる。静止衛星のみかけの角速度は、小さい。このため、衛星の角速度が著しく大きい場合には、静止衛星ではないと判断でき、局所解へ収束したと判定する。例えば、推定結果から衛星の仰角および方位角の速度A(・)z(ξ(^)(i)、tk)およびEl(・)z(ξ(^)(i)、tk)を計算し、下式(26)、(27)の判別式で判定することができる(ここで、(・)という表記は、その前の記号の上部に・が付くことを意味している)。
【0061】
【数13】
【0062】
(2)経度および緯度情報を用いた判定
ここでは、緯度、経度情報を用いた判定方法を説明する。静止衛星は、衛星運用会社により軌道管理されており、そのおおまかな緯度、経度は、一般公開されている。このため、推定結果から各衛星の経度および緯度を計算し、その値が、衛星運用会社による公表値などから著しく逸脱している場合には、正しい解と言えないため、局所解と見なすことができる。例えば、下式(28)、(29)の判別式が考えられる。
【0063】
【数14】
【0064】
ここで、Lon0(i)、Lat0(i)は、事前に得られる衛星のおおまかな経度および緯度情報であり、Lon(ξ(^)(i)、tk)、Lat(ξ(^)(i)、tk)は、軌道推定結果から計算した経度および緯度の値である。
【0065】
さらに、角度情報を用いたときと同様に、緯度、経度の運動幅と速度について、判定基準を設定することもできる。これは、上式(24)〜(27)の軌道推定値から仰角および方位角を計算する代わりに、緯度、経度およびそれらの速度を計算し、判定材料として使用すればよい。
【0066】
(3)3次元位置および速度の推定値情報を用いた判定
ここでは、衛星の3次元位置および速度情報を用いた判定方法を説明する。静止衛星は、みかけの3次元位置の動きが小さく、速度も最大数m/sと小さい。従って、このような値を著しく超える運動幅や速度をもつ軌道は、静止衛星ではないため、局所解と見なすことができる。
【0067】
よって、仰角および方位角情報、緯度および経度情報を用いたときと同様に、衛星の3次元の運動幅と速度について、判定基準を設定することができる。これは、上式(24)〜(27)で推定結果から仰角方位角を計算する代わりに、3次元の位置および速度を計算し、判定材料として使用すればよい。
【0068】
上述した(1)〜(3)の判定基準の中のいずれかを用いる、または複数を併用することにより、基準を満たさない軌道値の場合には、ユーザに警告を出すなどの処理を行い、必要であれば、再度、異なる初期値を与えるなどして推定アルゴリズム実行し、最適解を得るまで演算を繰り返せば、最終的に、最適解を得ることができる。
【0069】
以上のように、実施の形態2によれば、角度情報、経度および緯度情報、3次元位置および速度の推定値情報の少なくとも1つの情報に基づいて、軌道推定方式により得られた推定結果が、局所解か最適解かを容易に判定することができる。さらに、必要に応じて、再度、異なる初期値を与えるなどして推定アルゴリズム実行することにより、最終的に、最適解を得ることができる。
【図面の簡単な説明】
【0070】
【図1】本発明の実施の形態1における軌道推定方法の概念図である。
【図2】本発明の実施の形態1における軌道推定装置の構成図である。
【図3】本発明の実施の形態1の軌道推定方式における処理フローチャートである。
【図4】本実施の形態2における局所解と最適解の判別方法の概念図である。
【図5】TDOAおよびFDOAの概要図である。
【図6】従来の軌道推定方式の概念図である。
【図7】従来の軌道推定装置の構成図である。
【図8】従来の軌道推定方式における処理フローチャートである。
【符号の説明】
【0071】
10 設定パラメータ入力部、20 軌道推定初期値設定部、30 収束演算部、40 収束判定部。
【特許請求の範囲】
【請求項1】
複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび前記第1の情報を含む評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する収束演算部と、
前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、前記軌道決定パラメータの解を最適解と判定する収束判定部と
を備えた軌道推定装置において、
前記収束演算部は、前記複数の移動体の角度観測情報を第2の情報としてさらに入力し、前記軌道決定パラメータおよび前記第1の情報に加え前記第2の情報も加味した評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する
ことを特徴とする軌道推定装置。
【請求項2】
請求項1に記載の軌道推定装置において、
前記収束演算部は、前記第2の情報も加味した前記評価関数として、前記第1の情報に関する重みをα(ただし、αは、0≦α≦1の実数)とし、前記第2の情報に関する重みを(1−α)とし、αを所定値として設定することにより規定される関数を適用することを特徴とする軌道推定装置。
【請求項3】
請求項1または2に記載の軌道推定装置において、
前記収束演算部は、複数の移動体として複数の衛星を介して得られる同一電波の到来時間差およびドップラー周波数差を含む第1の情報と、前記複数の衛星の角度観測情報を含む第2の情報とを入力として取り込み、前記複数の衛星の軌道決定パラメータの解を推定することを特徴とする軌道推定装置。
【請求項4】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の見かけ角度を算出し、算出した前記見かけ角度と前記第2の情報に含まれる前記複数の衛星の角度観測情報との差分が所定許容角度差以下の場合には、前記軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項5】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の見かけ角度の遷移を算出し、前記所定期間にわたって算出した前記見かけ角度の遷移が所定の許容角度運動幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項6】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の見かけ角度を算出し、さらに、前回算出した見かけ角度と今回算出した見かけ角度との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項7】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の経度および緯度を算出し、前記経度および緯度の算出値と前記複数の衛星の経度および緯度の公表値との差分が所定許容差以下の場合には、前記軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項8】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の経度および緯度の遷移を算出し、前記所定期間にわたって算出した前記経度および緯度の算出値の遷移が所定の許容幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項9】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の経度および緯度を算出し、さらに、前回算出した経度および緯度の値と今回算出した経度および緯度の値との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項10】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の3次元位置の遷移を算出し、前記所定期間にわたって算出した前記3次元位置の遷移が所定の許容幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項11】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の3次元位置を算出し、さらに、前回算出した3次元位置の値と今回算出した3次元位置の値との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項12】
複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび前記第1の情報を含む評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する収束演算ステップと、
前記収束演算ステップで収束演算されることにより推定された前記軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、前記軌道決定パラメータの解を最適解と判定する収束判定ステップと
を備えた軌道推定方法において、
前記収束演算ステップは、前記複数の移動体の角度観測情報を第2の情報としてさらに入力し、前記軌道決定パラメータおよび前記第1の情報に加え前記第2の情報も加味した評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する
ことを特徴とする軌道推定方法。
【請求項13】
請求項12に記載の軌道推定方法において、
前記収束演算ステップは、前記第2の情報も加味した前記評価関数として、前記第1の情報に関する重みをα(ただし、αは、0≦α≦1の実数)とし、前記第2の情報に関する重みを(1−α)とし、αを所定値として設定することにより規定される関数を適用することを特徴とする軌道推定方法。
【請求項14】
請求項12または13に記載の軌道推定方法において、
前記収束演算ステップは、複数の移動体として複数の衛星を介して得られる同一電波の到来時間差およびドップラー周波数差を含む第1の情報と、前記複数の衛星の角度観測情報を含む第2の情報とを入力として取り込み、前記複数の衛星の軌道決定パラメータの解を推定することを特徴とする軌道推定方法。
【請求項1】
複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび前記第1の情報を含む評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する収束演算部と、
前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、前記軌道決定パラメータの解を最適解と判定する収束判定部と
を備えた軌道推定装置において、
前記収束演算部は、前記複数の移動体の角度観測情報を第2の情報としてさらに入力し、前記軌道決定パラメータおよび前記第1の情報に加え前記第2の情報も加味した評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する
ことを特徴とする軌道推定装置。
【請求項2】
請求項1に記載の軌道推定装置において、
前記収束演算部は、前記第2の情報も加味した前記評価関数として、前記第1の情報に関する重みをα(ただし、αは、0≦α≦1の実数)とし、前記第2の情報に関する重みを(1−α)とし、αを所定値として設定することにより規定される関数を適用することを特徴とする軌道推定装置。
【請求項3】
請求項1または2に記載の軌道推定装置において、
前記収束演算部は、複数の移動体として複数の衛星を介して得られる同一電波の到来時間差およびドップラー周波数差を含む第1の情報と、前記複数の衛星の角度観測情報を含む第2の情報とを入力として取り込み、前記複数の衛星の軌道決定パラメータの解を推定することを特徴とする軌道推定装置。
【請求項4】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の見かけ角度を算出し、算出した前記見かけ角度と前記第2の情報に含まれる前記複数の衛星の角度観測情報との差分が所定許容角度差以下の場合には、前記軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項5】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の見かけ角度の遷移を算出し、前記所定期間にわたって算出した前記見かけ角度の遷移が所定の許容角度運動幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項6】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の見かけ角度を算出し、さらに、前回算出した見かけ角度と今回算出した見かけ角度との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項7】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の経度および緯度を算出し、前記経度および緯度の算出値と前記複数の衛星の経度および緯度の公表値との差分が所定許容差以下の場合には、前記軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項8】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の経度および緯度の遷移を算出し、前記所定期間にわたって算出した前記経度および緯度の算出値の遷移が所定の許容幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項9】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の経度および緯度を算出し、さらに、前回算出した経度および緯度の値と今回算出した経度および緯度の値との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項10】
請求項3に記載の軌道推定装置において、
前記収束判定部は、所定期間にわたって前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解の遷移に基づいて、前記複数の衛星の3次元位置の遷移を算出し、前記所定期間にわたって算出した前記3次元位置の遷移が所定の許容幅以内の場合には、最終的に推定たれた軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項11】
請求項3に記載の軌道推定装置において、
前記収束判定部は、前記収束演算部で収束演算されることにより推定された前記軌道決定パラメータの解に基づいて、前記複数の衛星の3次元位置を算出し、さらに、前回算出した3次元位置の値と今回算出した3次元位置の値との差から角速度を算出し、算出した前記角速度が所定の許容角速度以内の場合には、今回推定した軌道決定パラメータの解を最適解と判定することを特徴とする軌道推定装置。
【請求項12】
複数の移動体を介して得られる同一電波の到来時間差およびドップラー周波数差を第1の情報として入力し、軌道決定パラメータおよび前記第1の情報を含む評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する収束演算ステップと、
前記収束演算ステップで収束演算されることにより推定された前記軌道決定パラメータの解が、所定の収束条件判定式を満たす場合には、前記軌道決定パラメータの解を最適解と判定する収束判定ステップと
を備えた軌道推定方法において、
前記収束演算ステップは、前記複数の移動体の角度観測情報を第2の情報としてさらに入力し、前記軌道決定パラメータおよび前記第1の情報に加え前記第2の情報も加味した評価関数を最小化するように収束演算を行い、前記軌道決定パラメータの解を推定する
ことを特徴とする軌道推定方法。
【請求項13】
請求項12に記載の軌道推定方法において、
前記収束演算ステップは、前記第2の情報も加味した前記評価関数として、前記第1の情報に関する重みをα(ただし、αは、0≦α≦1の実数)とし、前記第2の情報に関する重みを(1−α)とし、αを所定値として設定することにより規定される関数を適用することを特徴とする軌道推定方法。
【請求項14】
請求項12または13に記載の軌道推定方法において、
前記収束演算ステップは、複数の移動体として複数の衛星を介して得られる同一電波の到来時間差およびドップラー周波数差を含む第1の情報と、前記複数の衛星の角度観測情報を含む第2の情報とを入力として取り込み、前記複数の衛星の軌道決定パラメータの解を推定することを特徴とする軌道推定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−298605(P2008−298605A)
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願番号】特願2007−145436(P2007−145436)
【出願日】平成19年5月31日(2007.5.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年12月11日(2008.12.11)
【国際特許分類】
【出願日】平成19年5月31日(2007.5.31)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]