
軌道決定装置及び軌道決定方法
【課題】 GPS受信機の突発的な出力異常時や、GPS受信機の不使用時にも影響を受けることなく、人工衛星のオンボードでの軌道決定処理を行うことで、軌道決定精度を維持することを目的とする。
【解決手段】 リファレンス軌道データから人工衛星の第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定し、推定された地心半径を元に、人工衛星の軌道決定を行う。
【解決手段】 リファレンス軌道データから人工衛星の第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定し、推定された地心半径を元に、人工衛星の軌道決定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、軌道上を飛翔する人工衛星に搭載され、自衛星の軌道決定処理を行う軌道決定装置、及びその軌道決定方法に関するものである。
【背景技術】
【0002】
近年、軌道上を周回する人工衛星には、グローバルポジショニングシステム(GPS)として配備された測距用人工衛星(GPS衛星)からの電波を受信及び復調する、GPS受信機が設けられている。この人工衛星は、GPS受信機より復調された複数個のGPS衛星の位置及び速度情報と、その受信信号の位相及びドップラーシフトの測定データとに基づいて、GPS衛星とGPS受信機を搭載した人工衛星の相対距離及び相対速度情報を、人工衛星のオンボード計算処理で得ることにより、人工衛星の軌道をオンボードで決定している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特公平7−15646
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、GPS受信機の出力情報を利用して、オンボード計算機により人工衛星の軌道決定処理を行う場合、その軌道決定精度は、GPS受信機からの出力情報の精度に大きく依存することになる。また、GPS受信機の出力異常が、数秒から数分程度にわたって突発的に発生した場合は、その影響をまともに受けて精度が著しく劣化することになる。
【0005】
GPS受信機のみを利用して軌道上で人工衛星のオンボード軌道決定処理を行う場合、GPS受信機の異常時やGPS受信機の不使用時(例えば、GPS受信機の異常に伴う再起動(リブート)時など数分から数十分程度のGPS受信機出力が無くなる状態)に、GPS受信機の出力情報を使用しないで人工衛星の軌道を推定する処理が必要になる。このため、従来の軌道決定装置では、GPS受信機の不使用期間が長くなるほど、自衛星の軌道決定精度が悪化するという問題があった。
【0006】
この発明は、かかる問題点を解決するためになされたもので、GPS受信機の突発的な出力異常時や、GPS受信機の不使用時にも影響を受けることなく、人工衛星のオンボードでの軌道決定処理を行うことで、軌道決定精度を維持または向上することを目的としている。さらには、GPS受信機の出力精度が余り高くない場合において、高精度軌道決定を達成することを目的としている。
【課題を解決するための手段】
【0007】
この発明による軌道決定装置は、人工衛星の軌道データを保持するリファレンス軌道データ保持装置と、上記リファレンス軌道データ保持装置に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機の出力データから人工衛星の第2の軌道周期を求め、当該第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定するリファレンス軌道データ処理装置と、上記リファレンス軌道データ処理装置により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置と、を備えたものである。
【発明の効果】
【0008】
この発明によれば、突発的なGPS受信機の出力異常時、およびGPS受信機の不使用時にも、GPS受信機の出力の影響を受けることなく、人工衛星のオンボードによる軌道決定が可能となる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1における人工衛星の軌道決定装置の構成を示す図である。
【図2】この発明の実施の形態1における軌道決定装置の処理フローを示す図である。
【図3】人工衛星の軌道高度差3kmの地球周回軌道(地心半径)における重力ポテンシャルの相似性を示した図である。
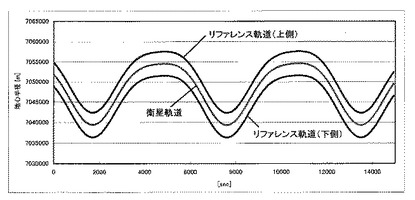
【図4】重力ポテンシャルの相似性を利用した内挿計算により人工衛星の軌道推定精度を向上させる例を示す図である。
【発明を実施するための形態】
【0010】
実施の形態1.
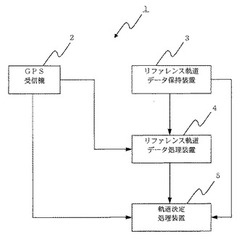
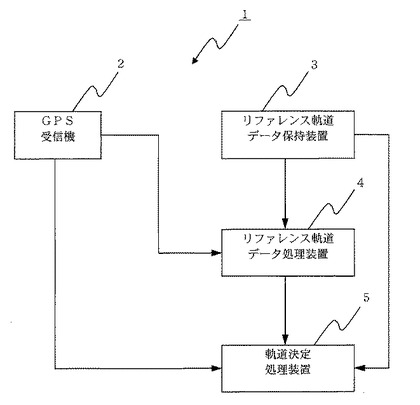
図1は、この発明に係る実施の形態1による、人工衛星の計算機に搭載された軌道決定装置の構成を示す図である。図において、実施の形態1の軌道決定装置1は、人工衛星の姿勢軌道制御電子回路(AOCE;Attitude and Orbit Control Electronics)に組み込まれて、人工衛星の軌道決定をオンボード処理にて行う。軌道決定装置1は、リファレンス軌道データ保持装置3と、リファレンス軌道データ処理装置4と、軌道決定処理装置5とから構成される。
【0011】
軌道決定装置1は、GPS受信機2の出力する航法結果を受信する。GPS受信機2は、GPS衛星から到来する測距用電波を受信し、複数個のGPS衛星の位置及び速度情報を復調する。また、GPS受信機2は、復調した受信信号から位相及びドップラーシフトの測定データを得て、GPS衛星とGPS受信機2を搭載した人工衛星との相対距離及び相対速度情報を求め、航法結果として出力する。リファレンス軌道データ保持装置3は、人工衛星に搭載された記憶装置であって、リファレンス軌道データのデータベースが構築されている。リファレンス軌道データ保持装置3には、軌道要素(カルテシアン、ケプラリアン)に係わる所要データが格納されており、格納されるデータは全ての軌道要素であったり、軌道要素を高次近似する補正式や補正係数であったりする(例えば、フーリエ級数係数など)。リファレンス軌道データとしては、例えば、時刻情報、軌道要素情報、軌道周期Tr、地心半径Rrなどが与えられる。
【0012】
リファレンス軌道データ処理装置4及び軌道決定処理装置5は、演算プロセッサによって構成される。姿勢軌道制御電子回路は、軌道決定処理装置5によって決定される軌道情報と、姿勢角センサにより得られる姿勢情報に基づいて、人工衛星の軌道及び位置制御を行うための制御指令を生成し、位置姿勢駆動制御装置に送る。位置姿勢駆動制御装置は、姿勢軌道制御電子回路からの制御指令に基づいて、人工衛星に搭載された姿勢制御用アクチュエータやスラスタを制御し、人工衛星の位置や姿勢を維持または変更する。
【0013】
なお、一般的に人工衛星を構成する他の装置、例えば、テレメトリ処理装置、コマンド処理装置、電源装置、太陽電池パドル装置、熱制御装置などについては、この発明の主旨とするところではないので、説明を省略する。
【0014】
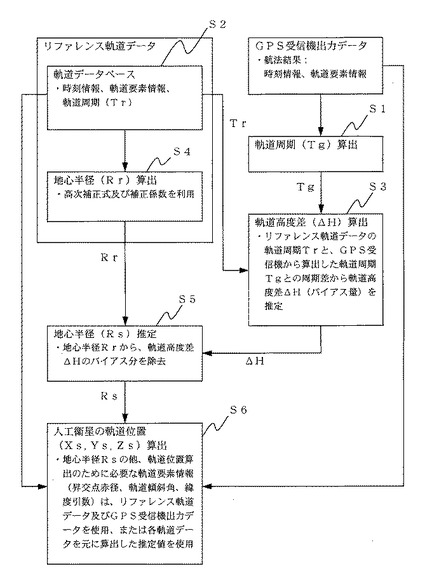
次に、軌道決定装置1の動作について説明する。図2は、軌道決定装置1のオンボードによる処理動作を示すフローチャートである。
図1、2において、リファレンス軌道データ処理装置4は、周期的にGPS受信機2からの出力データを受信する。GPS受信機2は、航法結果として、時刻情報、軌道要素情報(ケプラリアン、カルテシアン)などを出力する。
【0015】
リファレンス軌道データ処理装置4は、現在時刻においてGPS受信機2から出力される航法結果(GPS受信機出力データ)を元に、軌道周回毎の軌道周期Tgを算出する(ステップS1)。ここでは、例えば、軌道位置情報を元に赤道面を通過する時刻を求めることで軌道周期を得ることができる。また、例えば、軌道要素情報(軌道長半径)を元に軌道周期を算出しても良く、また、GPS受信機の出力情報に軌道周期情報が含まれているのであれば、それを利用しても良い。
【0016】
また、リファレンス軌道データ処理装置4は、現在時刻を元にリファレンス軌道データ保持装置3のデータベースを参照し、現在時刻における軌道周期Trを算出する(ステップS2)。
【0017】
次に、リファレンス軌道データ処理装置4は、リファレンス軌道データ保持装置3からの軌道周期TrとGPS受信機2からの軌道周期Tgとの軌道周期差を計算して、その軌道周期差をリファレンス軌道との軌道高度差(バイアス量)ΔHとして算出する(ステップS3)。ここでは、例えば、ケプラーの第3法則(軌道周期と軌道長半径の関係)より、軌道周期差から軌道高度差の近似値を得ることができる。なお、この軌道高度差の演算は、軌道の一周回または半周回などの一定の範囲において行う。
【0018】
また、リファレンス軌道データ処理装置4は、現在時刻を元にリファレンス軌道データ保持装置3を参照し、現在時刻における地心半径Rrを得る。なお、リファレンス軌道データ保持装置3において、地心半径Rrの時系列データ及び、高次に近似した地心半径Rrの時系列データを保持していない場合は、リファレンス軌道データ処理装置4にて、例えば、軌道要素を高次近似する補正式及び補正係数(例えば、フーリエ級数係数)を使用し、地心半径Rrを生成する処理(ステップS4)が必要となる。
【0019】
続いて、リファレンス軌道データ処理装置4は、得られた地心半径Rrから、軌道高度差ΔHによるバイアス分を除去することで、リファレンス軌道との軌道高度差分を補正(バイアス除去)した地心半径Rsを推定し、出力する(ステップS5)。補正した地心半径Rsは、地球の中心から人工衛星までの距離を示すパラメータである。
【0020】
次に、軌道決定処理装置5では、リファレンス軌道データ処理装置4から得られる推定した地心半径Rsに基づいて、人工衛星の軌道位置の算出(X座標、Y座標、及びZ座標の算出)を行う。ここでは、推定した地心半径Rsと、昇交点赤径及び軌道傾斜角、緯度引数を用いて、座標変換演算により、軌道位置の算出を行う(ステップS6)。なお、座標変換演算に必要な軌道要素情報は、例えば、リファレンス軌道データ及び、GPS受信機出力データを使用しても良いし、または、それぞれの軌道データを元に算出した推定値を使用しても良い。
【0021】
また、軌道決定処理装置5は、算出された軌道位置と、GPS受信機2からの航法結果による軌道位置を比較することで、異常値を除去して軌道を決定する。異常値とは、GPS受信機2の一時的なデータ飛びやデータ欠損などにより生じる出力値の異常を示す。ここでは、例えば、互いの航法結果による軌道位置に対応した各軌道要素を比較するとともに、それぞれの前値比較を行うことで、異常値を検出する。また、GPS受信機2については、GPS受信信号の測位品質を示すステータス情報(例えば、位置精度の影響を示すPDOP(Position Dilution of Precision)のような測位指標)を用いて、異常値を判断しても良い。
また、GPS受信機の異常値を除去したことにより、当該周回において軌道周期Tgが算出できなかった場合は、ステップS1において、例えば、GPS受信機2から過去に算出された軌道周期Tg(前回値)を、以降の処理においても用いる。もしくは、過去の軌道周回Tgから現在の軌道周期の推定計算を行っても良い。
【0022】
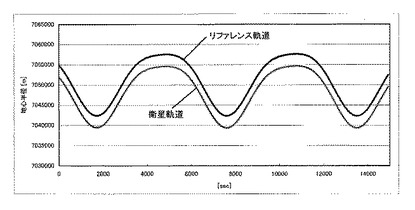
なお、実施の形態1による軌道決定装置は、人工衛星の高度差数km〜十数kmの地球周回軌道における重力ポテンシャルの相似性を利用したことを特徴としている。図3は重力ポテンシャルの相似性に基づくリファレンス軌道と実際の人工衛星軌道との高度差の関係例を示す図であり、図の縦軸は地心半径(m)、横軸は経過時間(秒)を示している。同図では、地球上を10×10の格子点で分割して、重力ポテンシャルの影響を考慮した人工衛星の軌道を算出している。
【0023】
図に示されるように、高度差数kmの地球周回軌道においては、重力ポテンシャルの影響には相似性があるので、リファレンス軌道データに基づいて軌道高度差を算出することで、容易に軌道位置を推定することができる。なお、軌道運動の関係から、同様にリファレンス軌道データに基づいて軌道速度差を算出することで、人工衛星の軌道速度(X座標、Y座標、及びZ座標)についても推定することができる。この際、リファレンス軌道データのモデルの精度(重力ポテンシャルの次数)を向上させることで、軌道決定精度の向上を図ることが可能である。また、リファレンス軌道データのモデルを入れ替えることで、様々な人工衛星の軌道高度に対応可能である。
【0024】
図4は重力ポテンシャルの相似性を利用した内挿計算により人工衛星の軌道推定精度を向上させる例を示す図であり、図の縦軸は地心半径(m)、横軸は経過時間(秒)を示している。
図において、上側と下側の2つのリファレンス軌道データを準備し、2つのリファレンス軌道データを用いることで、実際の人工衛星軌道を推定できることが示されている。この場合、図2のフロー図において、2つのリファレンス軌道データのそれぞれについて、ステップS2、ステップS3、ステップS4及び、ステップS5の処理を行う。ステップS3の処理において、2つのリファレンス軌道データを用いて、それぞれに軌道高度差ΔHを推定する。次に、ステップS4により、2つのリファレンス軌道データに基づく、それぞれの地心半径Rrについての高次近似を行う。ステップS5では、地心半径Rsから軌道高度差ΔHのバイアス分を除去し、得られた2つの地心半径Rsを使用して内挿計算を行い、補正された地心半径Rsを求める。その後の処理は、上記ステップS6と同じである。
【0025】
以上説明した通り、実施の形態1による軌道決定装置は、人工衛星の軌道高度を対象として、人工衛星のオンボードにリファレンス軌道データを保持し、またGPS受信機の航法結果を補正データとして使用する。また、リファレンス軌道を利用して得られる軌道周期と、軌道周回毎にGPS受信機の出力(航法結果)から得られる軌道周期とを用いて、その軌道周期差から軌道高度差を推定し、推定した軌道高度差から軌道決定を行うことを特徴としている。すなわち、人工衛星の軌道データを保持するリファレンス軌道データ保持装置3と、上記リファレンス軌道データ保持装置3に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機2を利用してGPS受信機2の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差を算出し、算出した軌道高度差から地心半径を推定するリファレンス軌道データ処理装置4と、上記リファレンス軌道データ処理装置4により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置5とを備えたことを特徴とする。
【0026】
これにより、数秒から数分程度にわたる突発的なGPS受信機の出力異常時、およびGPS受信機の不使用時(数分から数十分程度)にも、GPS受信機の出力の影響を受けることなく、オンボード軌道決定が可能となる。また、GPS受信機の出力精度と同等かそれ以上の航法精度を得ることが可能となる。
例えば、軌道周回時に、軌道位置情報を元に赤道面を通過する時刻を求めることで、軌道周期を得ることができるので、GPS受信機の出力を常時追跡せずに、軌道周期差に基づいて軌道位置を決定することができる。このため、GPS受信機が出力異常となったり、GPS受信機が不使用となったりした場合でも、軌道決定処理が影響を受ける確率が低減される。
かくして、人工衛星の軌道決定精度を維持または向上させることが可能となる。さらに、GPS受信機の出力精度が余り高くない場合においても、高精度に軌道決定を達成することができる。
【0027】
なお、図1において、リファレンス軌道データ保持装置3とリファレンス軌道データ処理装置4、軌道決定処理装置5の3つの装置に区分したが、これは説明のための便宜的な区分であり、それぞれ個別のハードウエアでもよいし、一部共通又はすべてを共通のハードウエア及びソフトウエア体系であっても、この発明の主旨とするところは同じである。例えば、リファレンス軌道データ処理装置4のステップS3により算出した軌道高度差を用いて、軌道決定処理装置5においてステップS5による地心半径Rsの推定処理を行う、その推定結果により軌道位置を決定しても良い。
【0028】
また、リファレンス軌道データ保持装置3についても、予め必要な情報を全て人工衛星のオンボードに保持してもよいし、必要な時に地上からのコマンドにより人工衛星のオンボードに設定及び保持する構成としても良いことは言うまでもない。
【符号の説明】
【0029】
1 人工衛星の軌道決定装置、2 GPS受信機、3 リファレンス軌道データ保持装置、4 リファレンス軌道データ処理装置、5 軌道決定処理装置。
【技術分野】
【0001】
この発明は、軌道上を飛翔する人工衛星に搭載され、自衛星の軌道決定処理を行う軌道決定装置、及びその軌道決定方法に関するものである。
【背景技術】
【0002】
近年、軌道上を周回する人工衛星には、グローバルポジショニングシステム(GPS)として配備された測距用人工衛星(GPS衛星)からの電波を受信及び復調する、GPS受信機が設けられている。この人工衛星は、GPS受信機より復調された複数個のGPS衛星の位置及び速度情報と、その受信信号の位相及びドップラーシフトの測定データとに基づいて、GPS衛星とGPS受信機を搭載した人工衛星の相対距離及び相対速度情報を、人工衛星のオンボード計算処理で得ることにより、人工衛星の軌道をオンボードで決定している(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特公平7−15646
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、GPS受信機の出力情報を利用して、オンボード計算機により人工衛星の軌道決定処理を行う場合、その軌道決定精度は、GPS受信機からの出力情報の精度に大きく依存することになる。また、GPS受信機の出力異常が、数秒から数分程度にわたって突発的に発生した場合は、その影響をまともに受けて精度が著しく劣化することになる。
【0005】
GPS受信機のみを利用して軌道上で人工衛星のオンボード軌道決定処理を行う場合、GPS受信機の異常時やGPS受信機の不使用時(例えば、GPS受信機の異常に伴う再起動(リブート)時など数分から数十分程度のGPS受信機出力が無くなる状態)に、GPS受信機の出力情報を使用しないで人工衛星の軌道を推定する処理が必要になる。このため、従来の軌道決定装置では、GPS受信機の不使用期間が長くなるほど、自衛星の軌道決定精度が悪化するという問題があった。
【0006】
この発明は、かかる問題点を解決するためになされたもので、GPS受信機の突発的な出力異常時や、GPS受信機の不使用時にも影響を受けることなく、人工衛星のオンボードでの軌道決定処理を行うことで、軌道決定精度を維持または向上することを目的としている。さらには、GPS受信機の出力精度が余り高くない場合において、高精度軌道決定を達成することを目的としている。
【課題を解決するための手段】
【0007】
この発明による軌道決定装置は、人工衛星の軌道データを保持するリファレンス軌道データ保持装置と、上記リファレンス軌道データ保持装置に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機の出力データから人工衛星の第2の軌道周期を求め、当該第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定するリファレンス軌道データ処理装置と、上記リファレンス軌道データ処理装置により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置と、を備えたものである。
【発明の効果】
【0008】
この発明によれば、突発的なGPS受信機の出力異常時、およびGPS受信機の不使用時にも、GPS受信機の出力の影響を受けることなく、人工衛星のオンボードによる軌道決定が可能となる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1における人工衛星の軌道決定装置の構成を示す図である。
【図2】この発明の実施の形態1における軌道決定装置の処理フローを示す図である。
【図3】人工衛星の軌道高度差3kmの地球周回軌道(地心半径)における重力ポテンシャルの相似性を示した図である。
【図4】重力ポテンシャルの相似性を利用した内挿計算により人工衛星の軌道推定精度を向上させる例を示す図である。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、この発明に係る実施の形態1による、人工衛星の計算機に搭載された軌道決定装置の構成を示す図である。図において、実施の形態1の軌道決定装置1は、人工衛星の姿勢軌道制御電子回路(AOCE;Attitude and Orbit Control Electronics)に組み込まれて、人工衛星の軌道決定をオンボード処理にて行う。軌道決定装置1は、リファレンス軌道データ保持装置3と、リファレンス軌道データ処理装置4と、軌道決定処理装置5とから構成される。
【0011】
軌道決定装置1は、GPS受信機2の出力する航法結果を受信する。GPS受信機2は、GPS衛星から到来する測距用電波を受信し、複数個のGPS衛星の位置及び速度情報を復調する。また、GPS受信機2は、復調した受信信号から位相及びドップラーシフトの測定データを得て、GPS衛星とGPS受信機2を搭載した人工衛星との相対距離及び相対速度情報を求め、航法結果として出力する。リファレンス軌道データ保持装置3は、人工衛星に搭載された記憶装置であって、リファレンス軌道データのデータベースが構築されている。リファレンス軌道データ保持装置3には、軌道要素(カルテシアン、ケプラリアン)に係わる所要データが格納されており、格納されるデータは全ての軌道要素であったり、軌道要素を高次近似する補正式や補正係数であったりする(例えば、フーリエ級数係数など)。リファレンス軌道データとしては、例えば、時刻情報、軌道要素情報、軌道周期Tr、地心半径Rrなどが与えられる。
【0012】
リファレンス軌道データ処理装置4及び軌道決定処理装置5は、演算プロセッサによって構成される。姿勢軌道制御電子回路は、軌道決定処理装置5によって決定される軌道情報と、姿勢角センサにより得られる姿勢情報に基づいて、人工衛星の軌道及び位置制御を行うための制御指令を生成し、位置姿勢駆動制御装置に送る。位置姿勢駆動制御装置は、姿勢軌道制御電子回路からの制御指令に基づいて、人工衛星に搭載された姿勢制御用アクチュエータやスラスタを制御し、人工衛星の位置や姿勢を維持または変更する。
【0013】
なお、一般的に人工衛星を構成する他の装置、例えば、テレメトリ処理装置、コマンド処理装置、電源装置、太陽電池パドル装置、熱制御装置などについては、この発明の主旨とするところではないので、説明を省略する。
【0014】
次に、軌道決定装置1の動作について説明する。図2は、軌道決定装置1のオンボードによる処理動作を示すフローチャートである。
図1、2において、リファレンス軌道データ処理装置4は、周期的にGPS受信機2からの出力データを受信する。GPS受信機2は、航法結果として、時刻情報、軌道要素情報(ケプラリアン、カルテシアン)などを出力する。
【0015】
リファレンス軌道データ処理装置4は、現在時刻においてGPS受信機2から出力される航法結果(GPS受信機出力データ)を元に、軌道周回毎の軌道周期Tgを算出する(ステップS1)。ここでは、例えば、軌道位置情報を元に赤道面を通過する時刻を求めることで軌道周期を得ることができる。また、例えば、軌道要素情報(軌道長半径)を元に軌道周期を算出しても良く、また、GPS受信機の出力情報に軌道周期情報が含まれているのであれば、それを利用しても良い。
【0016】
また、リファレンス軌道データ処理装置4は、現在時刻を元にリファレンス軌道データ保持装置3のデータベースを参照し、現在時刻における軌道周期Trを算出する(ステップS2)。
【0017】
次に、リファレンス軌道データ処理装置4は、リファレンス軌道データ保持装置3からの軌道周期TrとGPS受信機2からの軌道周期Tgとの軌道周期差を計算して、その軌道周期差をリファレンス軌道との軌道高度差(バイアス量)ΔHとして算出する(ステップS3)。ここでは、例えば、ケプラーの第3法則(軌道周期と軌道長半径の関係)より、軌道周期差から軌道高度差の近似値を得ることができる。なお、この軌道高度差の演算は、軌道の一周回または半周回などの一定の範囲において行う。
【0018】
また、リファレンス軌道データ処理装置4は、現在時刻を元にリファレンス軌道データ保持装置3を参照し、現在時刻における地心半径Rrを得る。なお、リファレンス軌道データ保持装置3において、地心半径Rrの時系列データ及び、高次に近似した地心半径Rrの時系列データを保持していない場合は、リファレンス軌道データ処理装置4にて、例えば、軌道要素を高次近似する補正式及び補正係数(例えば、フーリエ級数係数)を使用し、地心半径Rrを生成する処理(ステップS4)が必要となる。
【0019】
続いて、リファレンス軌道データ処理装置4は、得られた地心半径Rrから、軌道高度差ΔHによるバイアス分を除去することで、リファレンス軌道との軌道高度差分を補正(バイアス除去)した地心半径Rsを推定し、出力する(ステップS5)。補正した地心半径Rsは、地球の中心から人工衛星までの距離を示すパラメータである。
【0020】
次に、軌道決定処理装置5では、リファレンス軌道データ処理装置4から得られる推定した地心半径Rsに基づいて、人工衛星の軌道位置の算出(X座標、Y座標、及びZ座標の算出)を行う。ここでは、推定した地心半径Rsと、昇交点赤径及び軌道傾斜角、緯度引数を用いて、座標変換演算により、軌道位置の算出を行う(ステップS6)。なお、座標変換演算に必要な軌道要素情報は、例えば、リファレンス軌道データ及び、GPS受信機出力データを使用しても良いし、または、それぞれの軌道データを元に算出した推定値を使用しても良い。
【0021】
また、軌道決定処理装置5は、算出された軌道位置と、GPS受信機2からの航法結果による軌道位置を比較することで、異常値を除去して軌道を決定する。異常値とは、GPS受信機2の一時的なデータ飛びやデータ欠損などにより生じる出力値の異常を示す。ここでは、例えば、互いの航法結果による軌道位置に対応した各軌道要素を比較するとともに、それぞれの前値比較を行うことで、異常値を検出する。また、GPS受信機2については、GPS受信信号の測位品質を示すステータス情報(例えば、位置精度の影響を示すPDOP(Position Dilution of Precision)のような測位指標)を用いて、異常値を判断しても良い。
また、GPS受信機の異常値を除去したことにより、当該周回において軌道周期Tgが算出できなかった場合は、ステップS1において、例えば、GPS受信機2から過去に算出された軌道周期Tg(前回値)を、以降の処理においても用いる。もしくは、過去の軌道周回Tgから現在の軌道周期の推定計算を行っても良い。
【0022】
なお、実施の形態1による軌道決定装置は、人工衛星の高度差数km〜十数kmの地球周回軌道における重力ポテンシャルの相似性を利用したことを特徴としている。図3は重力ポテンシャルの相似性に基づくリファレンス軌道と実際の人工衛星軌道との高度差の関係例を示す図であり、図の縦軸は地心半径(m)、横軸は経過時間(秒)を示している。同図では、地球上を10×10の格子点で分割して、重力ポテンシャルの影響を考慮した人工衛星の軌道を算出している。
【0023】
図に示されるように、高度差数kmの地球周回軌道においては、重力ポテンシャルの影響には相似性があるので、リファレンス軌道データに基づいて軌道高度差を算出することで、容易に軌道位置を推定することができる。なお、軌道運動の関係から、同様にリファレンス軌道データに基づいて軌道速度差を算出することで、人工衛星の軌道速度(X座標、Y座標、及びZ座標)についても推定することができる。この際、リファレンス軌道データのモデルの精度(重力ポテンシャルの次数)を向上させることで、軌道決定精度の向上を図ることが可能である。また、リファレンス軌道データのモデルを入れ替えることで、様々な人工衛星の軌道高度に対応可能である。
【0024】
図4は重力ポテンシャルの相似性を利用した内挿計算により人工衛星の軌道推定精度を向上させる例を示す図であり、図の縦軸は地心半径(m)、横軸は経過時間(秒)を示している。
図において、上側と下側の2つのリファレンス軌道データを準備し、2つのリファレンス軌道データを用いることで、実際の人工衛星軌道を推定できることが示されている。この場合、図2のフロー図において、2つのリファレンス軌道データのそれぞれについて、ステップS2、ステップS3、ステップS4及び、ステップS5の処理を行う。ステップS3の処理において、2つのリファレンス軌道データを用いて、それぞれに軌道高度差ΔHを推定する。次に、ステップS4により、2つのリファレンス軌道データに基づく、それぞれの地心半径Rrについての高次近似を行う。ステップS5では、地心半径Rsから軌道高度差ΔHのバイアス分を除去し、得られた2つの地心半径Rsを使用して内挿計算を行い、補正された地心半径Rsを求める。その後の処理は、上記ステップS6と同じである。
【0025】
以上説明した通り、実施の形態1による軌道決定装置は、人工衛星の軌道高度を対象として、人工衛星のオンボードにリファレンス軌道データを保持し、またGPS受信機の航法結果を補正データとして使用する。また、リファレンス軌道を利用して得られる軌道周期と、軌道周回毎にGPS受信機の出力(航法結果)から得られる軌道周期とを用いて、その軌道周期差から軌道高度差を推定し、推定した軌道高度差から軌道決定を行うことを特徴としている。すなわち、人工衛星の軌道データを保持するリファレンス軌道データ保持装置3と、上記リファレンス軌道データ保持装置3に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機2を利用してGPS受信機2の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差を算出し、算出した軌道高度差から地心半径を推定するリファレンス軌道データ処理装置4と、上記リファレンス軌道データ処理装置4により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置5とを備えたことを特徴とする。
【0026】
これにより、数秒から数分程度にわたる突発的なGPS受信機の出力異常時、およびGPS受信機の不使用時(数分から数十分程度)にも、GPS受信機の出力の影響を受けることなく、オンボード軌道決定が可能となる。また、GPS受信機の出力精度と同等かそれ以上の航法精度を得ることが可能となる。
例えば、軌道周回時に、軌道位置情報を元に赤道面を通過する時刻を求めることで、軌道周期を得ることができるので、GPS受信機の出力を常時追跡せずに、軌道周期差に基づいて軌道位置を決定することができる。このため、GPS受信機が出力異常となったり、GPS受信機が不使用となったりした場合でも、軌道決定処理が影響を受ける確率が低減される。
かくして、人工衛星の軌道決定精度を維持または向上させることが可能となる。さらに、GPS受信機の出力精度が余り高くない場合においても、高精度に軌道決定を達成することができる。
【0027】
なお、図1において、リファレンス軌道データ保持装置3とリファレンス軌道データ処理装置4、軌道決定処理装置5の3つの装置に区分したが、これは説明のための便宜的な区分であり、それぞれ個別のハードウエアでもよいし、一部共通又はすべてを共通のハードウエア及びソフトウエア体系であっても、この発明の主旨とするところは同じである。例えば、リファレンス軌道データ処理装置4のステップS3により算出した軌道高度差を用いて、軌道決定処理装置5においてステップS5による地心半径Rsの推定処理を行う、その推定結果により軌道位置を決定しても良い。
【0028】
また、リファレンス軌道データ保持装置3についても、予め必要な情報を全て人工衛星のオンボードに保持してもよいし、必要な時に地上からのコマンドにより人工衛星のオンボードに設定及び保持する構成としても良いことは言うまでもない。
【符号の説明】
【0029】
1 人工衛星の軌道決定装置、2 GPS受信機、3 リファレンス軌道データ保持装置、4 リファレンス軌道データ処理装置、5 軌道決定処理装置。
【特許請求の範囲】
【請求項1】
人工衛星の軌道データを保持するリファレンス軌道データ保持装置と、
上記リファレンス軌道データ保持装置に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機の出力データから人工衛星の第2の軌道周期を求め、当該第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定するリファレンス軌道データ処理装置と、
上記リファレンス軌道データ処理装置により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置と、を備えた軌道決定装置。
【請求項2】
リファレンス軌道データ処理装置は、上記第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差を算出し、重力ポテンシャルの相似性を利用して、算出した軌道高度差から地心半径を推定することを特徴とする請求項1記載の軌道決定装置。
【請求項3】
リファレンス軌道データ処理装置は、2つの軌道データの内挿計算により人工衛星の地心半径を求めることを特徴とする請求項1記載の軌道決定装置。
【請求項4】
人工衛星に保持された軌道データから第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差及び軌道速度差を推定する処理と、
推定された軌道高度差及び軌道速度差から地心半径及び軌道速度を推定する処理と、
上記推定された地心半径及び軌道速度を元に、上記人工衛星の軌道決定を行う軌道決定処理と、を備えた軌道決定方法。
【請求項1】
人工衛星の軌道データを保持するリファレンス軌道データ保持装置と、
上記リファレンス軌道データ保持装置に保持された軌道データから人工衛星の第1の軌道周期を求めるとともに、GPS衛星からの測距用信号を受信するGPS受信機の出力データから人工衛星の第2の軌道周期を求め、当該第1の軌道周期と第2の軌道周期との周期差に基づいて地心半径を推定するリファレンス軌道データ処理装置と、
上記リファレンス軌道データ処理装置により推定された地心半径を元に、上記人工衛星の軌道決定を行う軌道決定処理装置と、を備えた軌道決定装置。
【請求項2】
リファレンス軌道データ処理装置は、上記第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差を算出し、重力ポテンシャルの相似性を利用して、算出した軌道高度差から地心半径を推定することを特徴とする請求項1記載の軌道決定装置。
【請求項3】
リファレンス軌道データ処理装置は、2つの軌道データの内挿計算により人工衛星の地心半径を求めることを特徴とする請求項1記載の軌道決定装置。
【請求項4】
人工衛星に保持された軌道データから第1の軌道周期を求めるとともに、上記GPS受信機の出力データから人工衛星の第2の軌道周期を求め、第1の軌道周期と第2の軌道周期との周期差に基づいて軌道高度差及び軌道速度差を推定する処理と、
推定された軌道高度差及び軌道速度差から地心半径及び軌道速度を推定する処理と、
上記推定された地心半径及び軌道速度を元に、上記人工衛星の軌道決定を行う軌道決定処理と、を備えた軌道決定方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−5985(P2011−5985A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−152225(P2009−152225)
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]