
軟質ホース自動挿入装置
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は自動車用高圧ホース等に使用される軟質ホースを断熱材等の軟質チューブに挿入するための軟質ホース自動挿入装置に関し、特に、挿入作業を自動化して製造効率を高めた軟質ホース自動挿入装置に関する。
【0002】
【従来の技術】ブレーキホース,パワーステアリングホース等の自動車用高圧ホースを、エンジンルームの内部に配管するときには、エンジン部品に近接する部分の外周に断熱チューブを嵌着させる必要がある。
【0003】この場合、断熱チューブとなる円筒状スポンジチューブの中空内部にゴムホースを挿入するが、スポンジチューブ,及びゴムホースは共に軟質体であり、曲がり易く、変形し易いことから、従来はこの作業を手作業によって行っている。
【0004】
【発明が解決しようとする課題】しかし、従来の軟質ホースの挿入方式によると、円筒状スポンジチューブの中空内部に手作業によってゴムホースを挿入しているため、ゴムホースをその外径より小さい内径を有する円筒状スポンジチューブに挿入するには多大な時間を要し、製造効率を低下させるという不都合がある。また、手作業ではゴムホースの挿入位置にバラツキが生じ、製品を均一に製造することができない。
【0005】従って、本発明の目的は作業時間を短縮して、製造効率を向上させることができる軟質ホース挿入装置を提供することである。
【0006】本発明の他の目的は軟質ホースの挿入位置を一定にし、製品を均一化することができる軟質ホース自動挿入装置を提供することである。
【0007】本発明の要旨の第1は、下端部に透過型光電スイッチとエアー供給部とを有し且つ円筒状スポンジチューブを挿入して直線的に固定できしかも前記エアー供給部から供給される高圧エアーを前記円筒状スポンジチューブの下端内周面側から上端側へ噴出できる有底筒状体の挿入パイプにある。
【0008】本発明の要旨の第2は、その挿入パイプ内に挿入された前記円筒状スポンジチューブの先端外周をその180°対峙した両方向から挾んで拡開できる二つのチューブガイドと、該チューブガイドにより拡開された前記円筒状スポンジチューブの先端拡開開口上にゴムホースをチャックで挾持しながら搬送できる関節ロボットと、該関節ロボットにより搬送されてきた前記ゴムホースの曲りを矯正できるホースガイドにある。
【0009】本発明の要旨の第3は、そのホースガイドにより曲りを矯正された前記ゴムホースの先端を前記円筒状スポンジチューブの先端拡開部に整合できるホースガイドとを具備して成ることを特徴とする軟質ホース自動挿入装置にある。
【0010】
【作用】上記構成に基づく本発明の軟質ホース自動挿入装置によると、エアー供給手段から軟質チューブの中空内部にエアーを送り込んで軟質チューブの内径を拡開すると共にエアー圧によって軟質チューブの硬度を高めているため、曲がり易く変形し易い軟質ホースを容易に挿入することができるようになり、その結果、ロボットによる自動挿入が可能となる。従って、作業時間を大幅に短縮することができ、製造効率を向上させることができる。
【0011】
【実施例】以下、本発明の軟質ホース自動挿入装置について添付図面を参照しながら詳細に説明する。
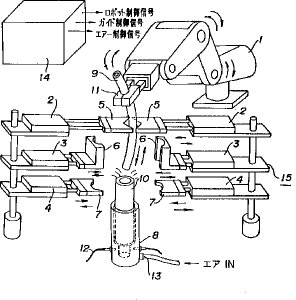
【0012】図1には、本発明の一実施例に係る軟質ホース自動挿入装置が示されている。この軟質ホース自動挿入装置は、円筒状スポンジチューブ10が内周面に固定される挿入パイプ8と、挿入パイプ8に固定された円筒状スポンジチューブ10の中空内部にエアーを送り込むエアー供給部13と、エアー供給部13によって内径を拡開された円筒状スポンジチューブ10に、ゴムホース9を挿入する関節ロボット1と、ゴムホース9と円筒状スポンジチューブ10の整合関係を調整するガイド機構15と、関節ロボット1,エアー供給部13,及びガイド機構15を制御する制御装置14より構成されている。
【0013】挿入パイプ8は、下端に透過型光電スイッチ12と、上記エアー供給部13を有しており、透過型光電スイッチ12は円筒状スポンジチューブ10に挿入されるゴムホース9の先端を検出するようになっている。
【0014】関節ロボット1は、先端にゴムホース9を挟持するチャック11を有し、挟持したゴムホース9を三次元的にX,Y,Z方向に移動させることができる。
【0015】ガイド機構15は、ゴムホース9の曲がりを矯正するホースガイド5,6と、ホースガイド5,6によって矯正されたゴムホース9の先端に円筒状スポンジチューブ10の先端が近づくように円筒状スポンジチューブ10を矯正するチューブガイド7と、ホースガイド5,6,及びチューブガイド7をそれぞれ前進・後退させるガイド前進/後退用シリンダ2,3,4から構成されている。
【0016】以下、本発明の動作を図2より図5を参照しながら説明する。まず、円筒状スポンジチューブ10を挿入パイプ8に固定すると共に、制御装置14から出力されるロボット制御信号によって関節ロボット1を作動させ、ゴムホース9をチャック11で挟持して前工程から挿入パイプ8上の所定の位置まで搬送する。
【0017】ゴムホース9が挿入パイプ8上に搬送されると、制御装置14からガイド制御信号が出力され、ガイド機構15のガイド前進/後退用シリンダ2を作動させ、ホースガイド5を前進させてゴムホース9の曲がりを矯正する。そして、ゴムホース9の先端を挿入パイプ8に固定された円筒状スポンジチューブ10の先端に近づける。
【0018】この後、制御装置14はガイド前進/後退用シリンダ3を作動させ、ホースガイド6を前進させて、ゴムホース9の先端が円筒状スポンジチューブ10の先端上に位置するようにゴムホース9を更に矯正する。
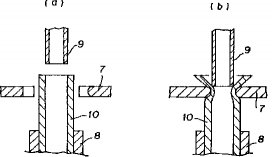
【0019】更に、制御装置14はガイド前進/後退用シリンダ4を作動させて、チューブガイド7を前進させ、円筒状スポンジチューブ10の先端がゴムホース9の先端と整合するように円筒状スポンジチューブ10の先端を矯正する。このとき、チューブガイド7は図2の(a) から図2の(b) に示すように変位し、円筒状スポンジチューブ10の先端部を押圧して、円筒状スポンジチューブ10の開口端を拡開する。このため、後述するゴムホース9の挿入作業が容易となる。
【0020】このようにして円筒状スポンジチューブ10が矯正されると、制御装置14からロボット制御信号が出力され、これによって関節ロボット1はゴムホース9の先端を円筒状スポンジチューブ10の先端から約5mmの位置まで挿入する(図2の(b) を参照)。このとき、制御装置14から出力されたガイド制御信号によってホースガイド5が予め後退させられており、関節ロボット1のチャック11とホースガイド5が衝突しないようになっている。
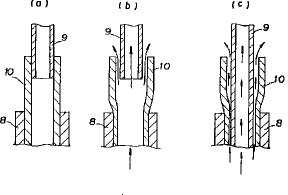
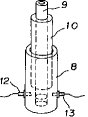
【0021】円筒状スポンジチューブ10の先端にゴムホース9が挿入されると、制御装置14からガイド制御信号が出力され、ガイド前進/後退用シリンダ4を作動させてチューブガイド7を後退させる。この後、制御装置14からエアー制御信号が出力され、挿入パイプ8の下端に設けられたエアー供給部13を作動させて、そこから挿入パイプ8に固定された円筒状スポンジチューブ10の中空内部にエアーを供給し、円筒状スポンジチューブ10の内径を図3の(a) から図3の(b) のように拡開する。
【0022】円筒状スポンジチューブ10の内径が拡開すると、制御装置14からガイド制御信号が出力され、ガイド前進/後退用シリンダ3を作動させて、ホースガイド6を後退させる。ホースガイド6が後退すると、制御装置14からロボット制御信号が出力され、これによって関節ロボット1は、図3の(c) に示すように、ゴムホース9を円筒状スポンジチューブ10の中空内部に挿入する。ゴムホース9が所定の目標位置(図4参照)まで挿入されると、挿入パイプ8の下端に設けられた透過型光電スイッチ12によってゴムホース9の先端を検出し、この検出によって挿入作業を完了する。
【0023】このようにして挿入作業が完了すると、図5R>5に示すチューブ付ホース20が得られ、チューブ付ホース20は関節ロボット1によって次工程へ搬送される。
【0024】以上の実施例では、エアー供給部13から円筒状スポンジチューブ10の中空内部にエアーを送り込んで円筒状スポンジチューブ10の内径を拡開すると共にエアー圧によって円筒状スポンジチューブ10の硬度を高めているため、曲がり易く変形し易いゴムホース9を容易に挿入することができるようになり、その結果、関節ロボット1による自動挿入が可能となる。従って、作業時間を大幅に短縮することができ、製造効率を向上させることができる。
【0025】
【発明の効果】以上説明したように、本発明の軟質ホース自動挿入装置によると、軟質チューブが内周面に固定されるパイプ状のチューブ固定手段と、チューブ固定手段に固定された軟質チューブの中空内部にエアーを送り込むエアー供給手段と、エアー供給手段によって内径を拡開された軟質チューブに、軟質ホースを挿入する関節ロボットを備えているため、作業時間を短縮して、製造効率を向上させることができる。また、チューブ固定手段に軟質チューブから突出した軟質ホースの先端を検出するホース検出手段が設けられているため、軟質ホースの挿入位置が一定となり、製品の均一化を図ることができる。
【図面の簡単な説明】
【図1】本発明の一実施例に係る軟質ホース自動挿入装置を示す説明図。
【図2】本発明の一実施例に係るチューブガイドの動作を示す説明図。
【図3】本発明の一実施例に係る軟質ホースの挿入状態を示す説明図。
【図4】本発明の一実施例に係る軟質ホースの挿入完了状態を示す説明図。
【図5】本発明の一実施例によって得られたチューブ付ホースを示す説明図。
【符号の説明】
1 関節ロボット
2,3,4 ガイド前進/後退用シリンダ
5,6 ホースガイド 7 チューブガイド
8 挿入パイプ 9 ゴムホース
10 円筒状スポンジチューブ 11 チャック
12 透過型光電スイッチ 13 エアー供給部
14 制御装置 15 ガイド機構
【0001】
【産業上の利用分野】本発明は自動車用高圧ホース等に使用される軟質ホースを断熱材等の軟質チューブに挿入するための軟質ホース自動挿入装置に関し、特に、挿入作業を自動化して製造効率を高めた軟質ホース自動挿入装置に関する。
【0002】
【従来の技術】ブレーキホース,パワーステアリングホース等の自動車用高圧ホースを、エンジンルームの内部に配管するときには、エンジン部品に近接する部分の外周に断熱チューブを嵌着させる必要がある。
【0003】この場合、断熱チューブとなる円筒状スポンジチューブの中空内部にゴムホースを挿入するが、スポンジチューブ,及びゴムホースは共に軟質体であり、曲がり易く、変形し易いことから、従来はこの作業を手作業によって行っている。
【0004】
【発明が解決しようとする課題】しかし、従来の軟質ホースの挿入方式によると、円筒状スポンジチューブの中空内部に手作業によってゴムホースを挿入しているため、ゴムホースをその外径より小さい内径を有する円筒状スポンジチューブに挿入するには多大な時間を要し、製造効率を低下させるという不都合がある。また、手作業ではゴムホースの挿入位置にバラツキが生じ、製品を均一に製造することができない。
【0005】従って、本発明の目的は作業時間を短縮して、製造効率を向上させることができる軟質ホース挿入装置を提供することである。
【0006】本発明の他の目的は軟質ホースの挿入位置を一定にし、製品を均一化することができる軟質ホース自動挿入装置を提供することである。
【0007】本発明の要旨の第1は、下端部に透過型光電スイッチとエアー供給部とを有し且つ円筒状スポンジチューブを挿入して直線的に固定できしかも前記エアー供給部から供給される高圧エアーを前記円筒状スポンジチューブの下端内周面側から上端側へ噴出できる有底筒状体の挿入パイプにある。
【0008】本発明の要旨の第2は、その挿入パイプ内に挿入された前記円筒状スポンジチューブの先端外周をその180°対峙した両方向から挾んで拡開できる二つのチューブガイドと、該チューブガイドにより拡開された前記円筒状スポンジチューブの先端拡開開口上にゴムホースをチャックで挾持しながら搬送できる関節ロボットと、該関節ロボットにより搬送されてきた前記ゴムホースの曲りを矯正できるホースガイドにある。
【0009】本発明の要旨の第3は、そのホースガイドにより曲りを矯正された前記ゴムホースの先端を前記円筒状スポンジチューブの先端拡開部に整合できるホースガイドとを具備して成ることを特徴とする軟質ホース自動挿入装置にある。
【0010】
【作用】上記構成に基づく本発明の軟質ホース自動挿入装置によると、エアー供給手段から軟質チューブの中空内部にエアーを送り込んで軟質チューブの内径を拡開すると共にエアー圧によって軟質チューブの硬度を高めているため、曲がり易く変形し易い軟質ホースを容易に挿入することができるようになり、その結果、ロボットによる自動挿入が可能となる。従って、作業時間を大幅に短縮することができ、製造効率を向上させることができる。
【0011】
【実施例】以下、本発明の軟質ホース自動挿入装置について添付図面を参照しながら詳細に説明する。
【0012】図1には、本発明の一実施例に係る軟質ホース自動挿入装置が示されている。この軟質ホース自動挿入装置は、円筒状スポンジチューブ10が内周面に固定される挿入パイプ8と、挿入パイプ8に固定された円筒状スポンジチューブ10の中空内部にエアーを送り込むエアー供給部13と、エアー供給部13によって内径を拡開された円筒状スポンジチューブ10に、ゴムホース9を挿入する関節ロボット1と、ゴムホース9と円筒状スポンジチューブ10の整合関係を調整するガイド機構15と、関節ロボット1,エアー供給部13,及びガイド機構15を制御する制御装置14より構成されている。
【0013】挿入パイプ8は、下端に透過型光電スイッチ12と、上記エアー供給部13を有しており、透過型光電スイッチ12は円筒状スポンジチューブ10に挿入されるゴムホース9の先端を検出するようになっている。
【0014】関節ロボット1は、先端にゴムホース9を挟持するチャック11を有し、挟持したゴムホース9を三次元的にX,Y,Z方向に移動させることができる。
【0015】ガイド機構15は、ゴムホース9の曲がりを矯正するホースガイド5,6と、ホースガイド5,6によって矯正されたゴムホース9の先端に円筒状スポンジチューブ10の先端が近づくように円筒状スポンジチューブ10を矯正するチューブガイド7と、ホースガイド5,6,及びチューブガイド7をそれぞれ前進・後退させるガイド前進/後退用シリンダ2,3,4から構成されている。
【0016】以下、本発明の動作を図2より図5を参照しながら説明する。まず、円筒状スポンジチューブ10を挿入パイプ8に固定すると共に、制御装置14から出力されるロボット制御信号によって関節ロボット1を作動させ、ゴムホース9をチャック11で挟持して前工程から挿入パイプ8上の所定の位置まで搬送する。
【0017】ゴムホース9が挿入パイプ8上に搬送されると、制御装置14からガイド制御信号が出力され、ガイド機構15のガイド前進/後退用シリンダ2を作動させ、ホースガイド5を前進させてゴムホース9の曲がりを矯正する。そして、ゴムホース9の先端を挿入パイプ8に固定された円筒状スポンジチューブ10の先端に近づける。
【0018】この後、制御装置14はガイド前進/後退用シリンダ3を作動させ、ホースガイド6を前進させて、ゴムホース9の先端が円筒状スポンジチューブ10の先端上に位置するようにゴムホース9を更に矯正する。
【0019】更に、制御装置14はガイド前進/後退用シリンダ4を作動させて、チューブガイド7を前進させ、円筒状スポンジチューブ10の先端がゴムホース9の先端と整合するように円筒状スポンジチューブ10の先端を矯正する。このとき、チューブガイド7は図2の(a) から図2の(b) に示すように変位し、円筒状スポンジチューブ10の先端部を押圧して、円筒状スポンジチューブ10の開口端を拡開する。このため、後述するゴムホース9の挿入作業が容易となる。
【0020】このようにして円筒状スポンジチューブ10が矯正されると、制御装置14からロボット制御信号が出力され、これによって関節ロボット1はゴムホース9の先端を円筒状スポンジチューブ10の先端から約5mmの位置まで挿入する(図2の(b) を参照)。このとき、制御装置14から出力されたガイド制御信号によってホースガイド5が予め後退させられており、関節ロボット1のチャック11とホースガイド5が衝突しないようになっている。
【0021】円筒状スポンジチューブ10の先端にゴムホース9が挿入されると、制御装置14からガイド制御信号が出力され、ガイド前進/後退用シリンダ4を作動させてチューブガイド7を後退させる。この後、制御装置14からエアー制御信号が出力され、挿入パイプ8の下端に設けられたエアー供給部13を作動させて、そこから挿入パイプ8に固定された円筒状スポンジチューブ10の中空内部にエアーを供給し、円筒状スポンジチューブ10の内径を図3の(a) から図3の(b) のように拡開する。
【0022】円筒状スポンジチューブ10の内径が拡開すると、制御装置14からガイド制御信号が出力され、ガイド前進/後退用シリンダ3を作動させて、ホースガイド6を後退させる。ホースガイド6が後退すると、制御装置14からロボット制御信号が出力され、これによって関節ロボット1は、図3の(c) に示すように、ゴムホース9を円筒状スポンジチューブ10の中空内部に挿入する。ゴムホース9が所定の目標位置(図4参照)まで挿入されると、挿入パイプ8の下端に設けられた透過型光電スイッチ12によってゴムホース9の先端を検出し、この検出によって挿入作業を完了する。
【0023】このようにして挿入作業が完了すると、図5R>5に示すチューブ付ホース20が得られ、チューブ付ホース20は関節ロボット1によって次工程へ搬送される。
【0024】以上の実施例では、エアー供給部13から円筒状スポンジチューブ10の中空内部にエアーを送り込んで円筒状スポンジチューブ10の内径を拡開すると共にエアー圧によって円筒状スポンジチューブ10の硬度を高めているため、曲がり易く変形し易いゴムホース9を容易に挿入することができるようになり、その結果、関節ロボット1による自動挿入が可能となる。従って、作業時間を大幅に短縮することができ、製造効率を向上させることができる。
【0025】
【発明の効果】以上説明したように、本発明の軟質ホース自動挿入装置によると、軟質チューブが内周面に固定されるパイプ状のチューブ固定手段と、チューブ固定手段に固定された軟質チューブの中空内部にエアーを送り込むエアー供給手段と、エアー供給手段によって内径を拡開された軟質チューブに、軟質ホースを挿入する関節ロボットを備えているため、作業時間を短縮して、製造効率を向上させることができる。また、チューブ固定手段に軟質チューブから突出した軟質ホースの先端を検出するホース検出手段が設けられているため、軟質ホースの挿入位置が一定となり、製品の均一化を図ることができる。
【図面の簡単な説明】
【図1】本発明の一実施例に係る軟質ホース自動挿入装置を示す説明図。
【図2】本発明の一実施例に係るチューブガイドの動作を示す説明図。
【図3】本発明の一実施例に係る軟質ホースの挿入状態を示す説明図。
【図4】本発明の一実施例に係る軟質ホースの挿入完了状態を示す説明図。
【図5】本発明の一実施例によって得られたチューブ付ホースを示す説明図。
【符号の説明】
1 関節ロボット
2,3,4 ガイド前進/後退用シリンダ
5,6 ホースガイド 7 チューブガイド
8 挿入パイプ 9 ゴムホース
10 円筒状スポンジチューブ 11 チャック
12 透過型光電スイッチ 13 エアー供給部
14 制御装置 15 ガイド機構
【特許請求の範囲】
【請求項1】下端部に透過型光電スイッチとエアー供給部とを有し且つ円筒状スポンジチューブを挿入して直線的に固定できしかも前記エアー供給部から供給される高圧エアーを前記円筒状スポンジチューブの下端内周面側から上端側へ噴出できる有底筒状体の挿入パイプと、該挿入パイプ内に挿入された前記円筒状スポンジチューブの先端外周をその180°対峙した両方向から挾んで拡開できる二つのチューブガイドと、該チューブガイドにより拡開された前記円筒状スポンジチューブの先端拡開開口上にゴムホースをチャックで挾持しながら搬送できる関節ロボットと、該関節ロボットにより搬送されてきた前記ゴムホースの曲りを矯正できるホースガイドと、該ホースガイドにより曲りを矯正された前記ゴムホースの先端を前記円筒状スポンジチューブの先端拡開部に整合できるホースガイドとを具備して成ることを特徴とする軟質ホース自動挿入装置。
【請求項1】下端部に透過型光電スイッチとエアー供給部とを有し且つ円筒状スポンジチューブを挿入して直線的に固定できしかも前記エアー供給部から供給される高圧エアーを前記円筒状スポンジチューブの下端内周面側から上端側へ噴出できる有底筒状体の挿入パイプと、該挿入パイプ内に挿入された前記円筒状スポンジチューブの先端外周をその180°対峙した両方向から挾んで拡開できる二つのチューブガイドと、該チューブガイドにより拡開された前記円筒状スポンジチューブの先端拡開開口上にゴムホースをチャックで挾持しながら搬送できる関節ロボットと、該関節ロボットにより搬送されてきた前記ゴムホースの曲りを矯正できるホースガイドと、該ホースガイドにより曲りを矯正された前記ゴムホースの先端を前記円筒状スポンジチューブの先端拡開部に整合できるホースガイドとを具備して成ることを特徴とする軟質ホース自動挿入装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【特許番号】第2707922号
【登録日】平成9年(1997)10月17日
【発行日】平成10年(1998)2月4日
【国際特許分類】
【出願番号】特願平4−226460
【出願日】平成4年(1992)8月3日
【公開番号】特開平6−55386
【公開日】平成6年(1994)3月1日
【出願人】(000005120)日立電線株式会社 (3,358)
【参考文献】
【文献】実開 昭63−116237(JP,U)
【登録日】平成9年(1997)10月17日
【発行日】平成10年(1998)2月4日
【国際特許分類】
【出願日】平成4年(1992)8月3日
【公開番号】特開平6−55386
【公開日】平成6年(1994)3月1日
【出願人】(000005120)日立電線株式会社 (3,358)
【参考文献】
【文献】実開 昭63−116237(JP,U)
[ Back to top ]