
転がり軸受における作動パラメータを求めるための方法及びコンピュータプログラムとこれにより評価可能な転がり軸受
本発明は、回転する転がり軸受(20)の特に回転数、回転方向、半径方向力、軸線方向力又は固体伝導音事象のような作動パラメータを求める方法及びコンピュータプログラムに関し、転がり軸受(20)にセンサ装置(26;27;29)が取付けられて、転がり軸受(20)の回転の際その回転位置に関係する波状信号(40)を供給し、この信号(40)がサンプリング点k,k+1,k+2,・・・でサンプリングされ、それによりサンプリング値x*(k),x*(k+1),x*(k+2),・・・が求められ、
A)評価により回転数、回転方向、半径方向力及び/又は軸線方向力を求めるため、信号(40)と交差しかつその包絡線にほぼ平行である補助線(42)が作図され、作動パラメータがこれに基いて求められ、かつ/又は
B)固体伝導音事象を求めるため、濾波サンプル値v(k),v(k+1),v(k+2),・・・を得るための高域フィルタ(59)において、サンプル値x*(k),x*(k+1),x*(k+2),・・・が濾波され、濾波サンプル値v(k),v(k+1),v(k+2)の少なくとも2次の統計的積率E{V2}(k),E{V2}(k+1),E{V2}(k+2)の評価により、現れる固体伝導音が求められ、
ここでkは経過した時間の実行変数としての整数である。
更に本発明は、本発明による方法又はコンピュータプログラムを実施するための評価装置を備えている転がり軸受(20)に関する。

A)評価により回転数、回転方向、半径方向力及び/又は軸線方向力を求めるため、信号(40)と交差しかつその包絡線にほぼ平行である補助線(42)が作図され、作動パラメータがこれに基いて求められ、かつ/又は
B)固体伝導音事象を求めるため、濾波サンプル値v(k),v(k+1),v(k+2),・・・を得るための高域フィルタ(59)において、サンプル値x*(k),x*(k+1),x*(k+2),・・・が濾波され、濾波サンプル値v(k),v(k+1),v(k+2)の少なくとも2次の統計的積率E{V2}(k),E{V2}(k+1),E{V2}(k+2)の評価により、現れる固体伝導音が求められ、
ここでkは経過した時間の実行変数としての整数である。
更に本発明は、本発明による方法又はコンピュータプログラムを実施するための評価装置を備えている転がり軸受(20)に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、転がり軸受における作動パラメータを求めるための請求項1又は19に記載の方法及びコンピュータプログラム製品(単にコンピュータプログラム又はソフトウエアともいう)と、前記の方法により評価可能な請求項20に記載の転がり軸受に関する。
【背景技術】
【0002】
転がり軸受は工業分野におけるあらゆる機械において使用されている。このような機械の寿命及び作動確実性のために、例えば回転数、回転方向、軸線方向及び半径方向に軸受へ作用する力、及び一般に固体伝導音事象と称される軸受の障害を検出し、それから軸受及び/又は機械の多分危険な状態の指摘を誘導する必要性がますます増大している。
【0003】
まず回転数及び力を求めるために必要な方法技術的自動機構を見出す若干の可能性が、原理的に提供されている。例えば曲線の微分についての局部的な極値、及び一次導関数の零値が求められる。それから極値の現れる時点が読取られ、それから最初の曲線の関数値が対応する時点に再び明らかになる。しかしセンサ信号に外乱が重畳されているので、微分についての試みが利用可能な結果を生じないことを考慮せねばならない。更にこの方法によれば、信号経過の値を一時記憶せねばならない。このような問題は、曲線の局部的最大値及び最小値を、信号周波数に合わせた幅を持つ間隔の時間的移動にわたって検出することによっても、しばしば解決される。しかしこの方法は、周波数が不変であるか、又は間隔幅を適当に再調節できるように徐々にのみ変化する時にのみ、実行可能である。軸受において使用する場合、回転数変化は速すぎるので、このような試みは初めから排除せねばならない。
【0004】
信号周波数及びそれから推論される回転数を求めるためのスペクトル評価方法も、使用には適していない。なぜならば、フーリエ変換又は高速フーリエ変換及びそれに含まれる一時的平均化により、周波数の変動がもはや検出されないので、実時間特性が失われるからである。更にこの場合必要なスペクトル精細度を得るため、曲線のかなりの数の関数値を一時記憶せねばならない。
【0005】
従ってこれらの作動パラメータを計算するために利用可能な方法は、大きいデータ量、これらのデータ量のために必要なメモリ容量及び必要な計算機能力のため、外部計算機従って現場で転がり軸受自体にあるチップでは実施できない、という難点がある。更に検出された転がり軸受データを外部の計算機へ伝送するために必要な多数のデータ導線を小さい転がり軸受に収容せねばならない、という問題がある。
【0006】
データ導線の問題は、センサ装置及び評価電子装置を付属するマイクロコンピュータと共に複数のセンサの形で転がり軸受の近くしかも転がり軸受に統合することにより、即ちいわゆるIQ軸受により、解決される。その点で開発への要求が特に高い。なぜならば、軸受の幾何学的外部形状を変えることなくセンサ装置及び評価電子装置のこの場所的な統合を行わねばならないからである。それにより温度、潤滑材及び冷却材の高まる周囲の影響及び必要なハードウエア部品の必要な小さい寸法のため、超小形電子部品に対する要求も当然高まる。特にマイクロプロセッサの小さい寸法により、必要な方法による機械的な統合は特別な挑戦である。なぜならば、センサから供給されるデータの評価のための計算能力がそれにより限定されるため、限られた手段しか利用できないにもかかわらず、軸受の作動パラメータの確実な検出が要求されるからである。
【0007】
前記の考察から帰着することは、計画された使用においてメモリを大幅になくし、それに応じて方法の開発も幾何学的条件に合わせねばならず、しかもできるだけ簡単な演算に関してだけでなく、サンプル値の一時記憶に必要な論理素子の数に関しても、前記の条件に合わせねばならないことである。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の基礎になっている課題は、転がり軸受の作動パラメータを求めるためのできるだけ効率的で確実な方法を提供し、転がり軸受の近くなるべく転がり軸受にある電子回路においてこの方法を実施でき、この方法をコンピュータプログラムとしても実現可能にすることである。更に作動パラメータを効率的にかつ確実に求める評価装置に接続可能であるか又は接続されている転がり軸受を提供する。
【課題を解決するための手段】
【0009】
この課題は、請求項1に記載の方法、請求項19に記載のコンピュータプログラム、及び請求項20に記載の転がり軸受により解決される。本発明の有利な展開は従属請求項の対象である。
【0010】
請求項1に記載の本発明による方法及び請求項19に記載の本発明によるコンピュータプログラムは、最小の空間で電子回路又は転がり軸受自体にあるチップに統合され、転がり軸受における動的変化に「知的」に反応し、作動パラメータを高い精度で求めることができる。
【0011】
請求項20に記載の本発明による転がり軸受は評価装置を含み、この評価装置により、請求項1〜18に記載の方法が、又はその代わりに記憶媒体(例えばRAM,ROM,CD,DVD,フロッピーディスク,固定板、フラッシュメモリ等)に記憶可能でありかつ/又は回路網を介して読出し可能な請求項19に記載のコンピュータプログラムが、実行可能である。その際なるべくチップにASICとして形成される評価装置の大きさは、軸受の外レースの溝内に置かれるため、限られた計算容量しか持っていないことが考慮されている。チップの幅は、先験的に外レースの幅によって決定される。更にチップは外レースの周方向に長すぎない。なぜならば、そうしないと、外レースの湾曲のため、溝内にあるチップが過度に強く曲げられ、それにより欠陥を生じるおそれがあるからである。限られたチップ面積により、モジュールにより実現可能な数学的又は信号理論的可能性も甚だしく限定されているが、本発明による方法を実施するには完全に充分である。特に多量の信号値を一時記憶に割当てられる評価方法は使用されない。
【0012】
本発明のそれ以外の利点及び特徴は、概略的であるが寸法は正確でない図面により、本発明の好ましいけれどもこれに限定されない実施形態の以下の説明から明らかになる。
【発明を実施するための最良の形態】
【0013】
まず本発明による転がり軸受及び作動パラメータを求める方法の理論的原則が説明され、続いてこれらの作動パラメータを求めるための本発明によるこの方法が、流れ図を使用して詳細に説明される。
【0014】
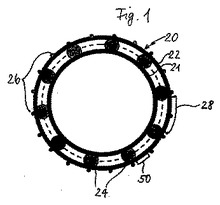
図1及び2は、本発明による転がり軸受20いわゆる知的軸受の主要構成部分を示している。図は象徴的であり、説明には役立つが、限定するものとみなすべきではない。
【0015】
知的軸受は、使用者に、転がり軸受20(以下単に「軸受」とも称される)に作用する力、軸受の回転数及び回転方向についての情報を与えるものとする。更に軸受欠陥及び転がり軸受20に伝達されて固体伝導音として認められる衝撃の検出可能性が与えられるものとする。このような転がり軸受20は内レース21及び外レース22を含み、外レースの外側に取囲む縦溝23が設けられている。内レース21と外レース22との間には転動体24が設けられているので、内レース21は外レース22に対して回転可能である。データの記録のためにセンサ装置26(以下単に「センサ」26とも称される)が用いられ、これらのセンサ装置は、好ましい実施例ではホィートストンブリッジにまとめられるそれぞれ4つのひずみ計31〜34であり、外レース22の外側にある縦溝23に収容され、その抵抗はその上を転がる転動体24により変化される。更に溝23内に設けられる印刷配線板28が示されており、各センサ26の個々のひずみ計31〜34の導体接続及びセンサ26と後述する評価装置50との導体接続を行う。転動体24の運動方向は、図2に矢印Aで示されている。
【0016】
溝23従って印刷配線板28は、後述するように、等間隔で設けられるセンサ26(ひずみ計31〜34)及び各センサ用の適当な評価装置50を持つ外レース22の全周にある。それにより生じるセンサ信号40は、評価装置50なるべくスイッチング回路の形の電気回路いわゆるASIC(特定用途向けIC)によって適当に評価される。作動パラメータを求めるためASICにおいて経過する本発明の方法は、限られた構造空間従って限られたチップ大きさにもかかわらずデータの一貫したオンライン評価が可能であるように、設定されねばならない。従ってセンサ及び知的評価ハードウエアの完全な単一体はいわゆる「スマートセンサ」であり、潜在的な顧客に遠くまで達する軸受20及びその作動パラメータについての情報を実時間で供給するのを可能にする。
【0017】
本発明による方法の構成のため、外レース22におけるセンサ26の幾何学的配置を考慮せねばならない。なぜならば、それによりセンサ26から供給される信号40の経過が決定され、従ってセンサ信号40の信号理論的処理の方法も限定されるからである。ホィートストンブリッジにまとめられるセンサ26の4つのひずみ計31〜34は、その相互間隔が半分の転動体間隔に相当するように、配置されている(図2参照)。それにより1つのブリッジの2つのひずみ計31及び33又は32及び34が常に同時に転動体24の上を転がるようにすることができる。溝23内でそれに続くホィートストンブリッジの最初のひずみ計31も同様に、先行するブリッジの最後のひずみ計34に対して再び半分の転動体間隔をとっている。この配置により、z個の転動体に対してz/2個のセンサ26が軸受に生じる。それにより力の影響をすべての半径方向から測定することができる。その代わりに、z/2個より多いか又は少ないセンサ例えばz/2−1,z/2+1,z+1又は2z個のセンサが存在していてもよい。一般的に表現すれば、ひずみ計(以下単にDMSとも称される)はなるべくブリッジとなるように配線されて、第1のDMSと第3のDMSとの間隔及び第2のDMSと第4のDMSとの間隔が転動体間隔の整数倍となるようにされる。更に2つのDMS(例えば第1及び第2のDMS)のみを、第3又は第4のDMSの代わりにひずみに感応しないそれぞれ1つの抵抗と共に、それぞれホィートストン半ブリッジとなるようにまとめることも可能である。前述したDMSの代わりに、例えば圧電又は磁気センサのような別のセンサも使用することができる.この場合センサと転動体との異なる関係が生じる。
【0018】
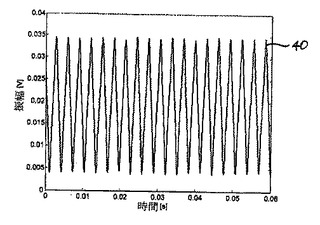
図2は、1つのセンサに対して、外レース22の溝23内におけるひずみ計と転動体24の幾何学的分布を示している。DMS31及びDMS33上を転がる際、一定の供給電圧UBにおいて、転動体の押付けにより生じるひずみ計の増大する変形と共に、ブリッジ出力電圧UA(t)が上昇する。ブリッジ回路において交点にわたって接続されるひずみ計は、同時に転動体上を通されるか又は変形され、それにより出力電圧の上昇は一層強められる。続いてひずみ計DMS31及びDMS33が次第に荷重を除かれ、遂にその最初の抵抗値に再び達し、ブリッジがほぼ平衡する。続いてひずみ計DMS32及びDMS34の上を転動体が転がる際、ブリッジ回路を逆の符号を持つように設定するため、出力電圧の同じ経過が起こるので、最終的に図3のほぼ正弦状の経過が生じる。ほぼ三角形の形状を持つ4つのひずみ計36,37,38,39をもつセンサ29の別の構成が破線で示され、それにより軸受20に作用する軸線方向力の検出が可能になる。軸線方向力の測定のためひずみ計を構成する別の可能性も当然存在する。
【0019】
軸受20又は対応するセンサ26に作用する力が大きいほど、転動体24からひずみ計に及ぼされる面圧も大きい。これによりブリッジ回路の抵抗値が変化し、従ってブリッジ出力電圧の振幅もそれに応じて大きくなる。従って軸受に及ぼされる力とブリッジ回路の出力電圧UA(t)との間に所定の関係が存在して、伸び又は伸びにより生じる力の評価に利用可能である。図3によれば、平均して約0.03Vの信号偏移が生じる。
【0020】
更に信号周波数fは、固定した外レース22において転動体24がひずみ計の上を転がる頻度に相当し、この頻度は、軸の回転数に対して次の数学的関係にある。
ここで変数zは転動体24の数を示し、Dwは転動体の直径、Dpwはピッチ円直径、αは円筒ころ軸受において零にセットされている圧力角である。nで軸の回転数U/Minが示され、Hzで周波数を得るため単位U/Hzに換算される。
【0021】
図3からわかるように、精確には同じでない抵抗値を持つブリッジの薄膜構造を転がり軸受鋼上に設ける際工程により生じてセンサ毎に異なるオフセット又はずれを、センサ信号40が持っている。抵抗値の非対称分布の結果、ブリッジ出力端に直流成分が生じる。別のオフセットが、転がり軸受の作動中に、周囲条件の変化例えば温度変化によって生じる。
【0022】
原理的に応用において、転がり軸受における表面欠陥又は汚物粒子上を転がることにより生じる固体伝導音事象が、ほぼ正弦状の基本振動に対して高い周波数の信号成分により、センサ信号中に現れる。図4はこのような転がり軸受欠陥の例を示している。
【0023】
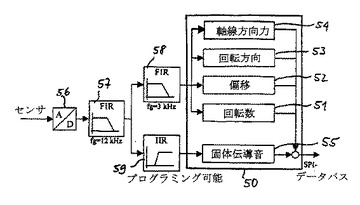
図5は、転がり軸受20の作動パラメータを求めるための本発明による評価装置50のブロック線図を示し、この評価装置は、軸受20の外レース22の溝23内に設けることができるなるべくASICの形に構成されている。それに応じてA/D変換器56におけるセンサ信号40のディジタル化後、続いて低域フィルタ57なるべくFIR(有限インパルス応答)フィルタによる高周波外乱成分の濾波後、2つの並列に設けられるモジュールにおけるセンサ信号の引続く処理が行われる。FIRフィルタ57は、12kHzの限界周波数においてなるべく16次である。フィルタ57例えばもっと高次であってもよいが、その場合ASIC50上に多くの場所を必要とする。各モジュールの始めに、分枝における評価のため重要な情報を含む周波数範囲の重み付けが行われる。上のモジュールにおいて、なるべくfg=3kHzの限界周波数を持つ同様に16次の別のFIRフィルタ58において、低域濾波が行われる。なぜならば、計画された使用のために予想される信号周波数は、最大でフィルタ58の限界周波数まで達する可能性があるからである。濾波限界を設定する際、フィルタモジュールによる振幅に合った伝送に対するより大きい値が、もっと高い周波数の信号成分の抑制に対して設定された。振幅減衰により場合によっては生じる誤りは、計算された信号偏移を高めることにより、後で再び補償される。それから軸受の求められる作動パラメータの決定が、回転数、(信号40の偏移に応じて)半径方向力、軸線方向力及び回転方向の形で行われ、これが対応する機能ブロック51〜54により概略的に示されている。下のモジュールにおいて、高域フィルタ59なるべく16次のIIR(無限インパルス応答)高域フィルタにより、なるべく回転数に関連する周波数が抑制され、機能ブロック55において、固体伝導音の一般に高周波成分が重み付けされ、続いて再処理により適当に評価される。図16a〜16bの流れ図からわかるように、個々の作動パラメータの検出は、必ずしも図2の概略図によって個々の機能ブロック(部分方法又は「評価ユニット」とも称される)51〜55において別々に行われるのではなくて、個々の部分方法又は評価ユニット(機能ブロック51〜55)がかみ合わされて実時間で結果を生じる単一方法で行われるのがよい。
【0024】
FIR フィルタのフィルタ限界は、任意の構造形式の軸受が同じASICで評価可能であるように選ばれるのがよい。従ってフィルタ限界は、信号評価の上の分枝において達成可能な信号対雑音比SNRと多くの軸受形式及び構造形式への知的軸受の費用分配との間の妥協である。ASICの下の分枝においてこの実施例では、6次のプログラミング可能なIIRフィルタを実行する必要がある。しかしそれにより1つの軸受形式に対しても、変化する回転数において、大きい周波数段階でフィルタを調整し、こうして固体伝導音事象のできるだけ最適な評価を行うことが可能である。「回転方向」、「偏移」、「回転数」、「軸線方向力」及び「固体伝導音」のブロックにおいて求められるセンサ信号の特徴は、外レース22の溝23内にあるがここには示してないSPI(逐次周辺インタフェース)バスを介して、軸受の外部にあるが同様に図示してないDSP(ディジタル信号プロセッサ)へ伝送される。DSPは、軸受においてデータ交換を編成し、軸受にあるASICをプログラミングし、又はデータを軸受に問合せるのを担当している。更にDSPにより、個々のセンサ26に作用する力のために、それぞれの信号偏移及び測定個所の幾何学的分布から生じる合力が計算可能である。しかし大体においてこのDSPは、知的軸受と、DSPにより供給される標準化されたインタフェースで軸受からデータを取出しかつ規定に従ってシステムへ作用するか又は装置の監視を行う顧客使用との間のインタフェースを形成する。
【0025】
さてセンサ信号40の評価従ってパラメータとしての回転数、回転方向、軸線方向力及び偏移を求めるためのできるだけ効率的な方法を見出す必要がある。簡単な計算技術手段による評価の可能性は、図6に示すようにセンサ信号が仮想補助線と交差する時に生じる。
【0026】
評価のために必要で補助線に関係しているセンサ信号40の曲線のパラメータが、図6にすべて記入されている。例えば補助線と曲線の順次に続く上昇辺との交点を示す2つの時点tauf1及びtauf2から、センサ信号の周期がわかり、従って式(1)により軸回転数がわかる。従って回転数がオンラインで最短時間内に求められる。回転数の計算のために、センサ信号40の下降辺と補助線42との交点tab1及びtab2も当然利用可能である。与えられたセンサ配置により、半波において回転数を求めることも可能であり、これは特に低い回転数において有意義と思われる。上昇辺交点及び下降辺交点の評価の組合わせでは、軸回転数の値へのアクセス時間が更に半分にされる。なぜならば、各半周期の間に新しい値が利用可能なので、低い回転数においても、情報が速やかに利用可能だからである。補助線42とセンサ信号40との交点がわかると、ちょうど評価が上昇辺で行われるか又は下降辺で行われるかが、非常に簡単に確認される。評価がちょうど曲線の上昇辺に対して行われると、本発明による方法は、下降辺と補助線42との交点に達するまで、時間にわたって存在するセンサ信号40のサンプル値にある最大値を探求する。それに続いて、存在するサンプル値にある最小値が、上昇辺のための次の交点が検出されるまで、探求される。こうして各信号周期に対して最大値ymax及び最小値yminが得られて、互いに減算されて信号偏移従ってこのセンサ26のために記録される半径方向力に対する補完を示す。ここでも連続して交互に差ymax1−ymin1及びymax2−ymin1を形成することにより、偏移値従って半径方向力へのアクセス時間が半分にされる。
【0027】
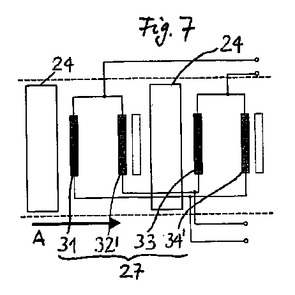
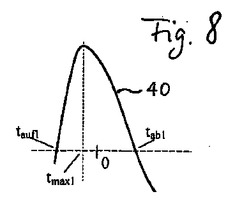
測定ブリッジ内におけるDMSは位置の図7に示す僅かな変更により、補助線で回転方向の判定基準も信号経過に入れられる。そのためセンサ27において、DMS対(図ではDMS2 32’及びDMS4 34’)が、明らかにするため破線で示すひずみ計32及び34に対して、図2からわかる配置に従って、今や回転方向Aに移動されて、一層早い時点に転動体がその上を転がるようにしている。それによりセンサ信号40の経過において、回転方向の検出に利用できる非対称が生じる。原理をわかり易くするため、図における状態は、実際の非対称に比較して誇張されている。ひずみ計32’汲び34’の移動のため、信号40の極値が時間方向に互いに移動しているので、例えば最大値が、回転方向に応じて、tauf1とtab1の時間的中心(図8の横座標上に0で示す)の左又は右にあり、図8による配置におけるtauf1及びtab1は、図2による配置に対して変っていない。従って回転方向は例えば次式からわかる。
【0028】
容易にわかるように、センサ信号40の評価はこうして非常に簡単に行われる。しかしこの場合も、補助線42を適当に構成することが困難である。原理的には、オフセットを持つ信号40の平均値が補助線42として与えられる。しかしこれは、平均値の従来の計算により、少なくとも1つの周期の間値を一時記憶するための適当な記憶場所を必要とする。例えば100r.p.m.の遅い回転数から出発すると、約11Hzの信号周波数が生じる。従って78kHzのシステムの使用されるサンプリング周波数では、1周期の間にそれぞれ14ビットの語幅を持つ約7000の値を一時記憶せねばならず、これは0.35μmの構造大きさに基く集積密度により、約90mm2のチップ面積に相当する。従って幾何学的規定のため、平均値の従来の形成では、このような方法は実用不可能である。更にオンライン評価も不可能である。
【0029】
しかし信号40の探求される平均値が、信号40と交差する補助線42として帰納的/適合的に評価されることによって、解決策が見出される。平均値のこの帰納的/適合的評価が本発明の好ましい実施形態である。即ち信号40と交差しかつ大体において信号の包絡線に対して平行であるか又はこの信号にほぼ追従する補助線が選ばれると、一般に充分である。
【0030】
伸びに感応するセンサ26から供給される曲線経過の平均値を評価するという上記の課題設定のために、次のスカラー式(3)が生じる。
ここで時点k及びK(k)におけるセンサ信号y(k)の線形期待値の推計学的変数E{Y}(k)は帰還ゲインであるか、又は換言すれば適合定数である。それにより軸受20の作動パラメータの評価に対する著しい障害が乗越えられ、回転数、回転方向、半径方向力及び軸線方向力を求めるための上述した簡単な方法が実行可能である。こうして計算される平均値は信号に適応した特徴を持ち、温度の影響のため場合によっては長時間にわたってゆっくり変化するオフセットに追従する。従って信号40がその平均値に関して不安定な特徴を持っていても、センサ信号40の常に事実に合った評価が保証される。
【0031】
帰還ゲインK(k)を雑音処理に関係して動的に計算することは、実際の使用にとって全く有利である。評価の速さ及び整合性に関して適合評価の設計は、例えば推計学的基準に従って行うことができる。結果は、時間経過において変化する帰還ゲインK(k)である。適応の初めに値K(k)が非常に大きく、それにより探索される値への急速な移行が行われる。引続く時間的経過において、ゲインが指数関数的に減少する。それにより評価への外乱の影響が著しく減少される。しかしそれにより更に生じる機能性は、できるだけ最大の効率では、指数関数的経過の計算の際必要な費用に関係しない。この理由から、本発明による方法における雑音の影響は、それ以上考慮されない。むしろ静的ゲインK(後でc0とも称される)が、実際にもっと有用である。なぜならば、それにより全体として、平均値の評価のための計算費用が非常に少ないからである。全体としてそのために、式(3)により、静的係数K又はcのため及び平均値E{Y}(k)のために、それぞれ1つのレジスタを必要とする。平均値のための評価値を求めるための計算費用は、僅かな基本演算に依拠している。
【0032】
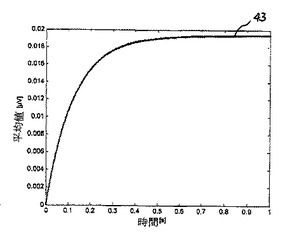
図9は、図3に示すセンサ信号40の平均値43を前述の方法により評価する経過を示している。
【0033】
作動パラメータの計算のために、現在のセンサ信号値の各サンプリングサイクルに得られる平均値が減算される。
【0034】
図示のためK=0.0001の帰還ゲインが選ばれた。平均値43を免れたセンサ信号45の過度特性を図10が示している。約0.5秒後に平均値が得られるので、遅くともこの時点からパラメータを問合わせることができる。しかしt=0.005秒からセンサ信号45は、補助線42である零線と交差する。この時点から既に、本発明による方法は、結果値自体にまだ僅か誤りを持っていても、これらの結果値を供給する。なぜならば、交点は同じ回転数において互いに変化するからである。
【0035】
次の段階で、固体伝導音事象の評価に適した方法従って固体伝導音の検出の理論的基礎が説明される。
【0036】
図5の固体伝導音分枝にある6次のIIRフィルタ59の周波数応答が、SPIバスを介して係数のダウンロードにより、その周波数特性をプログラミングされる。転がり軸受欠陥の検出のために、IIRフィルタに高域フィルタ特性が課されて、高周波の固体伝導音信号を図3によるほぼ正弦状の基本信号から分離する。
【0037】
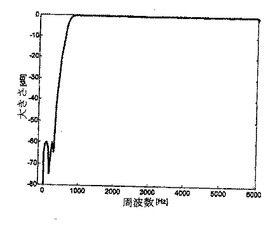
図11は、フィルタ59の使用に関する典型的な周波数応答を示している。通過帯域の限界周波数は1kHzの所にある。阻止帯域で60dB減衰が行われ、通過帯域において0.0002dBの減衰は無視できる。高域フィルタ59により、第1段階で、図4の円で囲んだ部分に示されるか又は図12に2回円で囲まれて見られるように、固体伝導音事象が抽出可能である。
【0038】
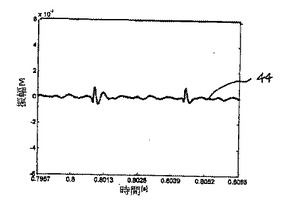
濾波の結果が図13に示されている。原理的にフィルタは、通過帯域及び阻止帯域におけるよい特性のため、固体伝導音事象を実時間で低い周波数から精確に分離することによって、非常に良好な結果を与えるので、濾波された信号44に、センサ信号40の基本振動からもはや何も認められない。それから出発して、閾値が時間軸に対して平行に引かれるように、固体伝導音事象についての自動化された証明を行うことができるであろう。IIRフィルタ59の出力信号44が閾値を超過すると、固体伝導音が存在する。しかし固体伝導音事象と固体伝導音が生じる時間部分との間でフィルタ59の出力端における分離性は非常に高くはない。閾値が充分低い所にあると、フィルタ信号44に重畳される雑音量のため、この閾値が常に超過されることが、原理的に起こり得る。他方これらの誤り警報を避けるため、閾値が高すぎではならない。なぜならば、そうしないと、雑音量が閾値に達しないのみならず、僅かな強さで現れる固体伝導音事象も、もはや検出できないからである。そのため、特に計算容量が不足するため、自動機構を使用できない時に、最適な閾値関数を探求することは非常に困難である。
【0039】
改善の可能性は、固体伝導音信号とフィルタ出力端の基本騒音との比従って信号対雑音比を、この分枝において高めることである。そのためフィルタ59の出力端における2次の通常の統計的積率の計算を使用することができる。
IRフィルタ59の出力値の2乗重み付けのため、固体伝導音事象は騒音処理から著しく強く際立たせられ、検査により実際データに示されたように、一層確実な検出のため閾値が著しく簡単に設けられる。しかしここでも、記憶場所に対して高度の要求を持つ方法を使用できないという制限があるので、通常の2次の統計的積率を、式(4)の従来の形でN値を求めることができない。しかし回転数を求める前述の方法に従って、ここでも計算のための別の方法が見出される。線形期待値を評価する式(4)と同様に、普通の2次の統計的積率のため信号に適合する帰納的な式が得られる。
帰納的な式の結果を適当に組合わせ、結果として生じる信号を評価することによって、固体伝導音の検出精度が更に改善される。例えば分散計算の信号に適合する帰納的バージョンが得られる。
【0040】
さて本発明による方法によって求めることができる作動パラメータと計算された評価値との関連について簡単に説明する。作動パラメータとしての「回転数」、「回転方向」、「半径方向力」及び「軸線方向力」を求める際、平均値評価の結果はもはや直ちには現われないが、このことは品質に対する重要性を減少することはない。むしろこれは、データの「敏速」即ち効率的な評価のため及び作動パラメータを求めるための基礎を形成する。
【0041】
回転方向を求める際、例えばセンサ信号の正の半波の中央軸からの最大値の偏差に対して、約−0.13msの平均値が生じ、これは、使用されるfa=78kHzのサンプリング周波数において、約10のサンプル値に相当する。全記録中における符号は常に0より小さいので、それから一義的に回転方向が関係づけられる。従って異なる回転方向は、偏差の正の符号を生じるであろう。
【0042】
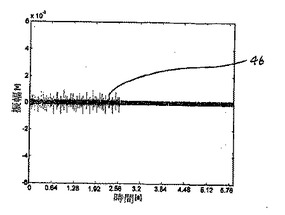
前記の作動パラメータにおいて線形期待値の帰納的計算とは異なり、固体伝導音事象を求める際、2次の統計的積率を求めると、直ちに結果値になる。本発明による方法の作用を示すため、IIRフィルタ59の図14に示す出力信号46から出発し、出力信号46の前の範囲のみが固体伝導音信号を含んでいる。後の範囲は、直接比較を行うことができるように、固体伝導音信号なしの転がり軸受から作成されている。
【0043】
この信号46に、式(5)による2次の通常の統計的積率の帰納的な適合評価を適用すると、結果として生じる信号48において、図15に示すように、最初の部分の著しい強調が生じる。従って固体伝導音事象の出現は、図14による信号46において出現した場合より著しくよく閾値にわたって検出される。
【0044】
式(5)による2次の通常の積率の前記の帰納的な適合評価が信号48に適用され、続いて式(3)を同じように使用しながら式(6)によるその分散が計算されると、得られる信号48の評価可能性が更に高まる。
【0045】
これに反し分散が既に信号46において計算されると、これも信号48の評価可能性を改善するが、信号48の分散を計算する場合のような程度には改善しない。しかしそれにより若干の計算が節約され、それにより速い処理が行われる。
【0046】
図5の固体伝導音分枝における著しい信号対雑音比に加えて、結果が閾値を超過すると、時間情報が評価され、これから生じる周期に基いて、誤りの源の指定が行われる。帰還ゲインは、この例ではK1=0.8に設定された。
【0047】
本発明による方法の精度は2つの方向に重要である。即ち振幅範囲における精細度および時間範囲における精細度である。知的軸受から求められる信号偏移及び固体伝導音の値の精度は、アナログ−ディジタル変換器の量子化及びレベル制御に関係している。回転数精度は、回転方向と同様に、システムのサンプリングラスタにより決定される時間精細度によって規定され、後者の程度は軸受の定性的(定量的でない)特徴である。
【0048】
テストのために実現されるASICの仕様書によれば最小3.0V及び最大3.6Vであってもよい供給電圧に関係して、また1Vの供給電圧当たり−3mV〜+3mVのアナログ−ディジタル変換器のいわゆる動的信号振幅に関係して、3.3Vの仮定した平均供給電圧において、変換すべきセンサ信号に対して−9.9mV〜+9.9mVの電圧範囲が得られる。これは19.8mVの最大信号偏移に相当する。実行されるアナログ−ディジタル変換器の語長は、外乱のない場合14ビットなので、1つの数字に1.2μVの電圧値が写像されている。ここで考察されている円筒ころ軸受の最大荷重を50kNと仮定する。それによりアナログ−ディジタル変換器の最大レベル制御を持つ完全な値範囲にわたって分布して、数字毎に約3Nの理論的精度が生じる。従って本発明による方法に対する要求は一層よく満たされる。なぜならば、周囲構造、軸受及びセンサの伝達系により、著しく粗い量子化が行われるからである。測定は200Nの範囲にある精細度を生じる。時間方向における量子化は、テストのために使用される伝達系においてちょうど78.125kHzの所にあるこの系のサンプリング周波数によって規定される。そのため理論的に最大に生じる回転数(及び回転方向)の誤りが、サンプリング周波数の逆数から誘導される。即ちTa=1/fa=12.8μso問題となっているすべての軸受のひずみ計上を転がる転動体の最大に起こり得る3kHzの転がり周波数では、3.8%の最大誤りが生じる。これは、測定における相対誤りと系の生じるデータ転送速度との間の非常に良好な妥協である。
【0049】
次に図16a〜16hに示す流れ図により、方法の好ましい実施形態が説明され、互いに関連する方法部分において、前記のすべての作動パラメータを求めることができる。しかしよりわかり易くするため、それぞれただ1つの作動パラメータの検出に説明が細分され、簡単化するため、経過する時間に対するパラメータ「T」が省略される。従って経過する時間は潜在的にパラメータ「k」に納まっている。流れ図相互の接続は結合個所V1〜V8によって示されている。
【0050】
既に述べたように、転がり軸受20の回転の際、各センサ26が、その回転位置に関係する波状の信号40を、例えば図3に示すように供給する。信号40はなるべく等間隔のサンプリング時点k,k+1,k+2・・・にサンプリングされ、その結果生じるサンプル値x*(k),x*(k+1),x*(k+2)・・・が、本発明による方法のそれぞれの部分に従って処理される。
【0051】
k=0について、まず信号40が、その瞬時値を求めるため、サンプル値x*(0)としてサンプリングされ、評価値E(x*(k=0))の開始値が、信号40の期待値として規定される。続いて順序変数kが1だけ高められる。続いて信号40が、時点k+1に、その瞬間値をもとめるため、(k+1)番目のサンプル値x*(k+1)としてサンプリングされる。
【0052】
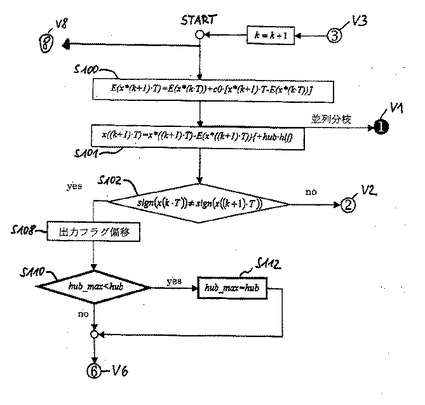
回転数
図16aによれば、段階S100において(k+1)番目の評価値E(x*(+1))が、先行するk番目の評価値E(x*(k))と、適合定数c0と(k+1)番目のサンプル値x*(k+1)からこのk番目の評価値E(x*(k))を減算した結果との積との和として、計算される。それから段階S101において、(k+1)番目のサンプル値x*(k+1)から、段階S100において計算された評価値D(x*(k+1))が減算され、差が(k+1)番目の計算値として引続く方法のために使用される。c0に対して0<c0<1が適用される。段階S101の計算において中括弧内にある最後の項は、回転数の計算にとって重要ではなく、従って考慮しなくてよい。段階S102において、計算されたこの(k+1)番目の計算値x(k+1)の符号が、この方法部分の先の実行の対応するk番目の計算値x(k)の符号と比較される。それから方法が2つの分枝に分岐する。
【0053】
段階S102において比較された符号が同じである場合、即ち信号40が符号変化せず、換言すれば零交差しなかった場合、kが1だけ高められ、方法段階S100〜S102が反復される。換言すれば、回転数を求めるため図16cによる方法段階S302〜S316は必要でない。段階S102において比較された符号が同じでない場合、即ち信号40が零交差しなかった場合、図16bの段階S203において、現在の段階S102の(k+1)番目の計算値x(k+1)が、段階S101の先行する実行において既に求められたk番目の計算値x(k+1)より大きいか否かが比較される。換言すれば、信号40が上昇辺にあるか下降辺にあるかが検査される。図16aによる方法段階S108,S110及びS112も、回転数を求めるためには必要でない。なお零経過の検査は、それにより、方法において信号40のサンプリングのどの段階にあるかが常にわかるという、付加的な利点を与える。零交差はいわば「ナビゲージョンシステム」であり、検出された測定値の指定を容易にする。このために述べるべきことは、例えばセンサ26,27又は29の構造の変化の際、零交差がいわばx軸上で「しっかりくくりつけられ」ているが、信号の形状は例えば図8に非対称により示されているように変化する。
【0054】
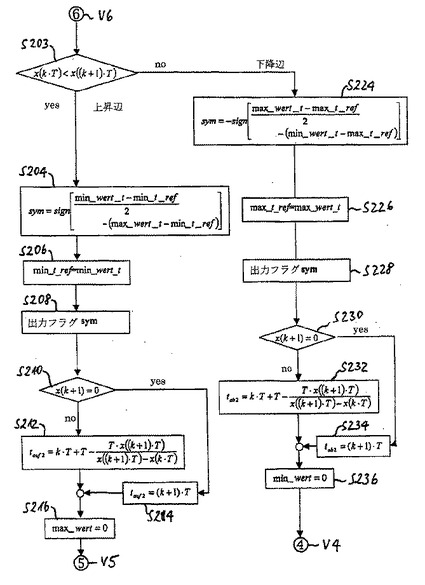
x(k+1)>x(k)を持つ段階S203において、信号が上昇辺にあることが明らかである場合、段階S210において、現在の計算値x(k+1)がちょうど零であるか否かが検査される。yesの場合、この計算値が生じた時点が、段階S214において、上昇辺における零交差の時点tauf2(図6参照)として固定的に保持される。しかしnoの場合、段階S212において、上昇辺における零交差の時点tauf2が、両方の計算値x(k+1)とx(k)との間の線形補間により求められる。この線形補間は、本発明による方法の好ましいやり方である。その代わりに、線形補間のための計算を省略するために、利用可能な近似として、零交差の起こる直前の時点又はその起こる直後の時点も利用することができ、その場合引続く方法において、零交差の起こる前又は後の同じ時点を常に考慮せねばならないであろう。その場合図16dの段階S404において、「上昇する」周期長ΔTaufが、上昇辺における2つの零交差の差、即ち今求められた「新しい」辞典tauf2と前の実行において求められた「古い」時点tauf1との差の形式により、計算される。続いて段階S406において、「新しい」時点tauf2が「古い」時点電tauf1として記憶され、それにより「上昇する」周期長ΔTaufの新たな計算の際これを利用することができる。段階S408は回転数を求めるためには必要ではなく、段階S410において「上昇する」周期長ΔTaufの出力のための出力フラグがセットされ、即ちその計算のためプロセッサに命令が与えられ、これが回転数の尺度として出力される。方法の一番最初の実行の際即ち「新しい」時点tauf2を最初に求める際、「古い」時点tauf1はまだ利用可能でない。従って2回目に「新しい」時点tauf2が計算された時に初めて、「上昇する」周期長ΔTaufが出力される。それからkが1だけ高められ、方法が段階S100で続行される。
【0055】
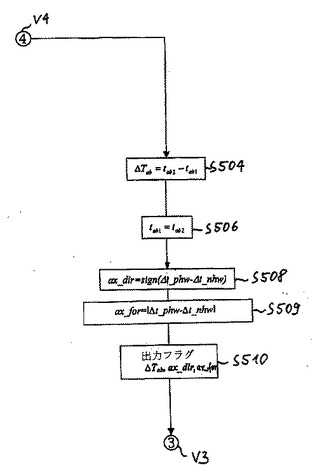
これに反し段階S203においてx(k+1)>x(k)でない場合、これは下降辺に信号があることを意味する。この場合段階S230,S232又はS234が前述した段階S210,S212又はS214と同じように実行され、その際tauf2の代わりに、下降辺における零交差の時点tab2が求められる。その場合段階S404及びS406と同様に、図16eの段階S504及びS506において、「新しい」時点tab2と「古い」時点tab1との差の形成により、「下降する」周期長ΔTabが計算され、段階S510において回転数の尺度として出力される。それから同様にkが1だけ高められ、方法が段階S100で続行される。
【0056】
従って周期毎に2回、回転数が、「上昇する」周期長ΔTauf及び「下降する」周期長ΔTabの形で求められる。
【0057】
原理的には、2つの最小値または2つの最大値の間隔によって周期長を求めることも可能であろう。しかしこれらの最小値又は最大値は比較的幅の広い「円頂」を形成し、従って零交差のように精密に検出されないので、その使用は特に雑音の場合不精確であり、従って好ましくない。
【0058】
それ以外の作動パラメータを求める際、既に前述した段階は、いずれにせよ新たに説明する必要がないので、反覆を避けるため再度詳細には示されない。
【0059】
軸線方向力
軸線方向力を求める際、段階S100及びS102は回転数を求める際と同じであり、回転数を求める際使用される段階S101に対するただ1つの相違は、計算値x(k+1)を決定する際補助量huf−hlfが加算され、即ち段階S101の計算において中括弧内にある最後の項が考慮されないことである。即ち補助線42が零線と一致しているのではなく、その下にあることである。補助量hub−hlfは自由に選ぶことができるが、0〜0.5の数(hlf)と信号偏移(hub)との積から構成されるのが好ましい。
【0060】
段階S203、上昇辺用の段階S210,S212及びS214と下降辺用の段階S230,S232及びS234は、回転数を求める場合と同じように実行される。
【0061】
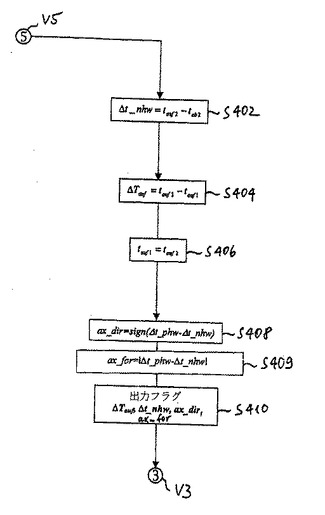
上昇辺について、段階s402において、下降辺の「新しい」時点tab2を上辺の「新しい」時点tauf2から減算することによって、負の半波が持続する時間間隔(Δt_nhw)が求められる。図6はこれとは異なっている。なぜならば、この図は、対応する値tauf1,tauf2,tab1,tab2が種々の方法実行において「大きく移動する」こと、即ちその記号が方法の進行中に順次に変化することを考慮していないからである。それからこのような順次変化を示す段階S406が実行される。
【0062】
段階S101〜S406の実行に対し並列に、図16a及び図16fに「並列分枝」で示されかつ図16fに段階S601で始まる別の方法分枝が実行される。段階S601は、補助量hub−hlfが加算されずに減算される点でのみ、段階S101と相違している。それはもっと上にある適当な補助線と信号40との交差を行うことにほかならない。段階S101の計算値x(k+1)に対して一層よく区別できるようにするため、段階S601において生じる計算値がy(k+1)で示され、この区別は段階S602,S603,S610,S612,S614,S640,S632及びS634において維持され、そうでない場合これらの段階は「主分枝」における段階S103,S203,S210,S212,S214,S230.S232及びS234と同じように経過する。「主分枝」において求められる零交差が並列分枝において求められる零交差と異なることを明らかにするため、後者の零交差は「*」を付けられている。下降辺については、段階S638において、上昇辺の「新しい」時点t*auf2を下降辺の「新しい」時点t*ab2から減算することによって、段階S638において、正半波が持続する時間間隔(Δt_phw)が求められる。続いて段階S406と同様な段階S506が実行される。
【0063】
それから段階S408及び/又は段階S508において、段階S638において求められた時間間隔Δt_phwを、段階S402において求められた時間間隔Δt_nhwから減算することができ、この差Δt_phw−Δt_nhwの符号は、軸受20に作用する軸線方向力の方向ax_dirを示し、段階S410及び/又はS510において出力可能である。更に段階S409及び/又はS509において、差Δt_phw−Δt_nhwの値ax_forを軸線方向力の大きさの尺度として求め、段階S410及び/又はS510において一緒に出力することができる。
【0064】
それにより軸受20に作用する軸線方向力も求められる。
【0065】
半径方向力
半径方向力を求める場合、段階S100,S101及びS102は回転数を求める場合と同じである。段階S102において比較される符号が同じである場合、即ち零交差が行われなかった場合、段階S302において、段階S101の(k+1)番目の計算値x(k+1)の符号が1に等しいか否か、即ち信号40が正の半波にあるか否かが検査される。yesの場合段階S304において、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最大値max_wertより大きいか否かが検査され、yesの場合、段階S305において、この(k+1)番目の計算値x(k+1)が信号40の新しい最大値max_wertとして記憶され、それからkが1だけ高められ、方法が段階S100で続行される。noの場合、段階S308において信号40の偏移hubが、その最大値max_wertと最小値min_wertとの差max_wert_min_wertの形式により求められ、最小値min_wertを求めることは後述される。もちろん本発明による方法において、最大値max_wertも最小値min_wertも存在する時に初めて、偏移を計算することができる。それからkが1だけ高められ、方法が段階S100で続行される。段階S302において、(k+1)番目の計算値x(k+1)の符号が1に等しくなく、即ち信号40が負の半波にあることがわかると、同様に段階S304,S315及びS318において、信号40の最小値min_wertが求められ又は記憶され、偏移が計算される。それから再びkが1だけ高められ、方法が段階S100で続行される。ここで述べておくべきことは、逆の差即ちmin_wert−max_wertによっても、従って同様に信号周期毎に2回、信号偏移を計算して出力することができることである。
【0066】
段階S102において、符号変化又は零交差が行われたことがわかると、段階S108において出力フラグがセットされ、信号偏移を軸受20に作用する半径方向力の尺度として出力することができる。段階S110において信号偏移が今まで求められた最大信号偏移hub_maxより大きいか否かが検査される。yesの場合、求められた現在の信号偏移が新しい最大信号偏移hub_maxとして記憶される。これは、強い衝撃を知るのに役立つ。最大信号偏移hub_maxの値は利用者によりいつでも消去可能である。
【0067】
それから再び段階S203において、信号が上昇辺にあるか下降辺にあるかの事例区別が行われる。第1の場合信号40の最大値max_wertが、第2の場合最小値min_wertが零にリセットされ、kが1だけ高められ、方法が段階S100で続行される。
【0068】
それにより半径方向力も、転がり軸受20の別の作動パラメータとして求められる。
【0069】
上述した説明からわかるように、最小値と最大値との間の零通過が検出されている時にのみ、最小値又は最大値がそれ自体として認められる。それにより、信号の「谷」において、場合のよってはそれと結びつく下位極値が(誤まった)最小値又は最大値として検出されることがないようにすることができる。
【0070】
回転方向
回転方向を求める際、段階S100,S101及びS102は、回転数を求める場合と同じである。
【0071】
段階S102において比較される符号が同じである場合、即ち零交差が起こらなかった場合、段階S302(図16c)において、段階S101の(k+1)番目の計算値x(k+1)の符号が1に等しいか否かが、即ち信号40の正の半波にあるか否かが検査される。yesの場合、段階S304において、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最大値max_wertより大きいか否かが検査され、yesの場合、段階S306において、この(k+1)番目の計算値x(k+1)(即ちmax_wert)が生じた時点max_wert_t(図8におけるtmax1及び式(2)に相当する)が記憶され、それからkが1だけ高められ、方法が段階S100で続行される。段階S302において、(k+1)番目の計算値x(k+1)が1に等しくなく、即ち信号40が負の半波にあると、段階S314におけるのと同じように、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最小値min_wertより小さいか否かが検査され、yesの場合、段階S315において、この(k+1)番目の計算値x(k+1)(即ちmin_wert)が生じた時点が記憶され、それからkが1だけ高められ、方法が段階S100で続行される。
【0072】
段階S102において比較される符号が同じでない場合、即ち信号40が零交差を行った場合、図16bの段階S203において、別の事例区別において、現在の段階S101の(k+1)番目の計算値x(k+1)が、段階S101の以前の実行の際既に求められたk番目の計算値x(k)より大きいか否かが比較される。換言すれば、信号40が上昇辺にあるか又は下降辺にあるかが検査される。信号40が上昇辺にある場合、段階S204において回転方向が次のようにして求められる。即ちその意味を後述される最小補助変数min_t_refが、信号40の最小値の発生時点min_wert_tから減算され、結果が2により除算され、この時から最小補助変数min_t_refの減算の結果が、信号40の最大値発生時点max_wert_tから減算される。この値の符号signは、転がり軸受20の回転方向symの情報として使用され、それにより段階S208において回転方向sym用の出力フラグがセットされ、これが出力される。しかし出力の前に、段階S206において、更に信号40の最小値発生時点min_wert_tが、新しい最小補助変数min_t_refとして記憶される。それによりこの最小補助変数min_t_refの意味も明らかにされている。続いてkが1だけ高められ、方法が段階S100で続行される。しかし信号40が下降辺にある場合、(段階S204におけるのと同様に)段階S224において、回転方向symが次のようにして求められる。即ちその意味を同様に後述される最大補助変数max_t_refが、信号40の最大値の発生時点max_wert_tから減算され、結果が2により除算され、この時から最大補助変数max_t_refの減算の結果が、信号40の最小値の発生時点min_wert_tから減算される。この値の符号signは,再び転がり軸受20の回転方向の情報として使用され、それにより段階S228において回転方向symの出力フラグがセットされ、これが出力される。しかし出力の前に段階S216において、更に信号40の最大値の発生時点max_wert_tが新しい最大補助変数max_t_refとして記憶される。それにより最大補助変数max_t_refの意味も明らかにされている。
【0073】
従って転がり軸受20の回転方向も求められる。
【0074】
回転数、回転方向軸線方向力及び半径方向力を求めるそれぞれの方法部分において単一の適合係数c0の使用により、この適合定数が信号40の期待値の計算の際いつも同じであることを、暗に前提としていた。しかし種々の方法部分において必要な場合、種々の作動パラメータの計算にとって有利であれば、種々の適応定数を使用することができる。
【0075】
次に固体伝導音の算出の説明が続く。
【0076】
固体伝導音
このためk=0に対して、信号40が、その瞬時値を求めるため、サンプリング開始値x*(0)としてサンプリングされる。評価値E(x*(k=0))は信号40の期待値として必要とされず、後述するように、濾波サンプル値v(k=0)の2次の通常の統計的積率E{V2}(k=0)が必要とされる。続いて順序変数kが1だけ高められる。続いて信号40が、その瞬時値を求める時点(k+1)に(k+1)番目のサンプル値x*(k+1)としてサンプリングされる。
【0077】
図16gにおいてx*(k)で略記されたサンプル値x*(k),x*(k+1),x*(k+2)・・・は、段階S702において、フィルタ係数を自由にプログラミング可能な少なくとも5次のIIR高域フィルタ59を通る。それによりセンサ信号40の低周波成分が除去される。フィルタ59の出力端には、図13に示すように、ここではv(k)で略記されるフィルタサンプル値v(k),v(k+1),・・・が現れる。段階S704において式(5)により、「新しい」フィルタサンプル値v(k+1)に対する2次の通常の統計的積率E{V2}(k+1)が計算される。このため「新しい」フィルタサンプル値v(k+1)の2乗v2(k+1)から、「古い」フィルタサンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)が差引かれ、この差が適応定数c1と乗算され、乗算の結果が「古い」フィルタサンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)に加算される。c1に対して0<c1<1が成立する。2次のこの通常の統計的積率が図15の左側に示されている。それから出力信号outputが、段階S710において定量的な誤り信号として出力され、更に出力信号outputが段階S719において閾値と比較され、この閾値を上回る場合、定性的な値として出力され、これが段階S720において「出力フラグ固体伝導音」で示されている。更に段階S712において、出力信号outputが今まで検出された(利用者により任意に消去可能な)最大出力信号Output_maxを超過しているか否か検査され、段階S714においてこの出力信号が新しい最大出力信号Output_maxとして記憶され、それから段階S716において出力され、それが「出力フラグOutput_max」で示されている。
【0078】
引続く処理のために、わかり易くするため、段階S704の計算からの出力値E{V2}(k+1)が簡略化してu(k+1)示される。段階S706において、段階S704からわかった2次の通常の統計的積率の計算が行われるが、u(k+1)に対する2次の通常の統計的積率E{V2}(k+1)を計算するため、値u(k)に基いて行われる。段階S704において使用される適応定数c1の代わりに、適応定数c2が使用され、これに対して0<c2<1が成立する。しかしc1=c2であってもよい。段階S707において、式(3)によりu(k+1)の期待値E{U}(k+1)が計算される。このためu(k+1)kara,u(k)の期待値E{U}(k)が減算され、この差が適応定数c3(これに対して0<c3<1が成立する)と乗算され、乗算の結果が期待値E{U}(k)に加算される。c3は必ずしもc1及び/又はc2と相違していなくてもよい。それから段階S708において、段階S707の結果の2乗を段階S706の結果から減算することによって、分散σ2(k+1)が計算される。それから前記の可能性で再び出力(選択的に段階S710及び/又はS717及び/又はS720)が行われ、その際段階S706〜S708により、センサ信号及び雑音の検出及び区別の精度は、段階S704による出力後におけるより良い。
【0079】
それにより転がり軸受20に生じる固体伝導音も検出される。
【0080】
多くの試験において、本発明による方法が探求される作動パラメータを非常に確実に求め、課された課題のために最適に処理することがわかった。線形期待値及び2次の通常の統計的積率の式を使用することにより、生じるデータの評価により、作動パラメータをASICにおいて最小の空間で確実かつ速やかに求めることが可能である。本発明の方法は、特に、主として比較及び加算を使用し、費用のかかる乗算又は除算を使用せず、最小の記憶場所しか必要としない簡単な記憶装置に基いているので、非常に効率的である。
【0081】
前記の説明では、本発明による方法がASICで実行され、従って固定的に配線される装置において実行されることを前提としていた。しかし本発明による方法がソフトウエアの形即ちコンピュータプログラムの形で普通の計算機において実行可能なことは、明らかである。
【0082】
個々の実施形態を参照して説明した本発明の特徴、例えば流れ図又は方法の理論的基礎の説明の個々の段階は、異なるように示されているか技術的な理由から禁じられる場合を除いて、異なる実施形態において存在していてもよい。
【図面の簡単な説明】
【0083】
【図1】 本発明による転がり軸受の概略図を示す。
【図2】 本発明による転がり軸受の外側溝にあるホイートストンブリッジにおけるひずみ計の配置を概略的に示す。
【図3】 本発明による転がり軸受において発生されるセンサ信号の典型的な例を示す。
【図4】 固体伝導音事象が起こるセンサ信号を示す。
【図5】 本発明によるASICのブロック線図を示す。
【図6】 作動パラメータを評価する基準点が示されているセンサ信号を示す。
【図7】 軸受に作用する軸線方向力を検出する装置の図2に類似な図を示す。
【図8】 回転方向を求める測定原理を説明するための図を示す。
【図9】 平均値の評価の時間的経過のグラフを示す。
【図10】 平均値を除かれたセンサ信号の移行特性のグラフを示す。
【図11】 固体伝導音分枝にあるIIR高域フィルタの周波数応答を示す。
【図12】 半径方向荷重を受けかつ2つの固体伝導音事象が生じている軸受のセンサ信号を示す。
【図13】 IIR高域フィルタの出力端における固体伝導音信号のグラフを示す。
【図14】 IIR高域フィルタの出力信号のグラフを示し、信号が左側で固体伝導音を持ち、右側には固体伝導音を持っていない。
【図15】 図14におけるのと同じ信号の部分のグラフを示すが、信号の2次の通常の統計的積率は帰納的に計算されている。
【図16a】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16b】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16c】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16d】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16e】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16f】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16g】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16h】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【技術分野】
【0001】
本発明は、転がり軸受における作動パラメータを求めるための請求項1又は19に記載の方法及びコンピュータプログラム製品(単にコンピュータプログラム又はソフトウエアともいう)と、前記の方法により評価可能な請求項20に記載の転がり軸受に関する。
【背景技術】
【0002】
転がり軸受は工業分野におけるあらゆる機械において使用されている。このような機械の寿命及び作動確実性のために、例えば回転数、回転方向、軸線方向及び半径方向に軸受へ作用する力、及び一般に固体伝導音事象と称される軸受の障害を検出し、それから軸受及び/又は機械の多分危険な状態の指摘を誘導する必要性がますます増大している。
【0003】
まず回転数及び力を求めるために必要な方法技術的自動機構を見出す若干の可能性が、原理的に提供されている。例えば曲線の微分についての局部的な極値、及び一次導関数の零値が求められる。それから極値の現れる時点が読取られ、それから最初の曲線の関数値が対応する時点に再び明らかになる。しかしセンサ信号に外乱が重畳されているので、微分についての試みが利用可能な結果を生じないことを考慮せねばならない。更にこの方法によれば、信号経過の値を一時記憶せねばならない。このような問題は、曲線の局部的最大値及び最小値を、信号周波数に合わせた幅を持つ間隔の時間的移動にわたって検出することによっても、しばしば解決される。しかしこの方法は、周波数が不変であるか、又は間隔幅を適当に再調節できるように徐々にのみ変化する時にのみ、実行可能である。軸受において使用する場合、回転数変化は速すぎるので、このような試みは初めから排除せねばならない。
【0004】
信号周波数及びそれから推論される回転数を求めるためのスペクトル評価方法も、使用には適していない。なぜならば、フーリエ変換又は高速フーリエ変換及びそれに含まれる一時的平均化により、周波数の変動がもはや検出されないので、実時間特性が失われるからである。更にこの場合必要なスペクトル精細度を得るため、曲線のかなりの数の関数値を一時記憶せねばならない。
【0005】
従ってこれらの作動パラメータを計算するために利用可能な方法は、大きいデータ量、これらのデータ量のために必要なメモリ容量及び必要な計算機能力のため、外部計算機従って現場で転がり軸受自体にあるチップでは実施できない、という難点がある。更に検出された転がり軸受データを外部の計算機へ伝送するために必要な多数のデータ導線を小さい転がり軸受に収容せねばならない、という問題がある。
【0006】
データ導線の問題は、センサ装置及び評価電子装置を付属するマイクロコンピュータと共に複数のセンサの形で転がり軸受の近くしかも転がり軸受に統合することにより、即ちいわゆるIQ軸受により、解決される。その点で開発への要求が特に高い。なぜならば、軸受の幾何学的外部形状を変えることなくセンサ装置及び評価電子装置のこの場所的な統合を行わねばならないからである。それにより温度、潤滑材及び冷却材の高まる周囲の影響及び必要なハードウエア部品の必要な小さい寸法のため、超小形電子部品に対する要求も当然高まる。特にマイクロプロセッサの小さい寸法により、必要な方法による機械的な統合は特別な挑戦である。なぜならば、センサから供給されるデータの評価のための計算能力がそれにより限定されるため、限られた手段しか利用できないにもかかわらず、軸受の作動パラメータの確実な検出が要求されるからである。
【0007】
前記の考察から帰着することは、計画された使用においてメモリを大幅になくし、それに応じて方法の開発も幾何学的条件に合わせねばならず、しかもできるだけ簡単な演算に関してだけでなく、サンプル値の一時記憶に必要な論理素子の数に関しても、前記の条件に合わせねばならないことである。
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明の基礎になっている課題は、転がり軸受の作動パラメータを求めるためのできるだけ効率的で確実な方法を提供し、転がり軸受の近くなるべく転がり軸受にある電子回路においてこの方法を実施でき、この方法をコンピュータプログラムとしても実現可能にすることである。更に作動パラメータを効率的にかつ確実に求める評価装置に接続可能であるか又は接続されている転がり軸受を提供する。
【課題を解決するための手段】
【0009】
この課題は、請求項1に記載の方法、請求項19に記載のコンピュータプログラム、及び請求項20に記載の転がり軸受により解決される。本発明の有利な展開は従属請求項の対象である。
【0010】
請求項1に記載の本発明による方法及び請求項19に記載の本発明によるコンピュータプログラムは、最小の空間で電子回路又は転がり軸受自体にあるチップに統合され、転がり軸受における動的変化に「知的」に反応し、作動パラメータを高い精度で求めることができる。
【0011】
請求項20に記載の本発明による転がり軸受は評価装置を含み、この評価装置により、請求項1〜18に記載の方法が、又はその代わりに記憶媒体(例えばRAM,ROM,CD,DVD,フロッピーディスク,固定板、フラッシュメモリ等)に記憶可能でありかつ/又は回路網を介して読出し可能な請求項19に記載のコンピュータプログラムが、実行可能である。その際なるべくチップにASICとして形成される評価装置の大きさは、軸受の外レースの溝内に置かれるため、限られた計算容量しか持っていないことが考慮されている。チップの幅は、先験的に外レースの幅によって決定される。更にチップは外レースの周方向に長すぎない。なぜならば、そうしないと、外レースの湾曲のため、溝内にあるチップが過度に強く曲げられ、それにより欠陥を生じるおそれがあるからである。限られたチップ面積により、モジュールにより実現可能な数学的又は信号理論的可能性も甚だしく限定されているが、本発明による方法を実施するには完全に充分である。特に多量の信号値を一時記憶に割当てられる評価方法は使用されない。
【0012】
本発明のそれ以外の利点及び特徴は、概略的であるが寸法は正確でない図面により、本発明の好ましいけれどもこれに限定されない実施形態の以下の説明から明らかになる。
【発明を実施するための最良の形態】
【0013】
まず本発明による転がり軸受及び作動パラメータを求める方法の理論的原則が説明され、続いてこれらの作動パラメータを求めるための本発明によるこの方法が、流れ図を使用して詳細に説明される。
【0014】
図1及び2は、本発明による転がり軸受20いわゆる知的軸受の主要構成部分を示している。図は象徴的であり、説明には役立つが、限定するものとみなすべきではない。
【0015】
知的軸受は、使用者に、転がり軸受20(以下単に「軸受」とも称される)に作用する力、軸受の回転数及び回転方向についての情報を与えるものとする。更に軸受欠陥及び転がり軸受20に伝達されて固体伝導音として認められる衝撃の検出可能性が与えられるものとする。このような転がり軸受20は内レース21及び外レース22を含み、外レースの外側に取囲む縦溝23が設けられている。内レース21と外レース22との間には転動体24が設けられているので、内レース21は外レース22に対して回転可能である。データの記録のためにセンサ装置26(以下単に「センサ」26とも称される)が用いられ、これらのセンサ装置は、好ましい実施例ではホィートストンブリッジにまとめられるそれぞれ4つのひずみ計31〜34であり、外レース22の外側にある縦溝23に収容され、その抵抗はその上を転がる転動体24により変化される。更に溝23内に設けられる印刷配線板28が示されており、各センサ26の個々のひずみ計31〜34の導体接続及びセンサ26と後述する評価装置50との導体接続を行う。転動体24の運動方向は、図2に矢印Aで示されている。
【0016】
溝23従って印刷配線板28は、後述するように、等間隔で設けられるセンサ26(ひずみ計31〜34)及び各センサ用の適当な評価装置50を持つ外レース22の全周にある。それにより生じるセンサ信号40は、評価装置50なるべくスイッチング回路の形の電気回路いわゆるASIC(特定用途向けIC)によって適当に評価される。作動パラメータを求めるためASICにおいて経過する本発明の方法は、限られた構造空間従って限られたチップ大きさにもかかわらずデータの一貫したオンライン評価が可能であるように、設定されねばならない。従ってセンサ及び知的評価ハードウエアの完全な単一体はいわゆる「スマートセンサ」であり、潜在的な顧客に遠くまで達する軸受20及びその作動パラメータについての情報を実時間で供給するのを可能にする。
【0017】
本発明による方法の構成のため、外レース22におけるセンサ26の幾何学的配置を考慮せねばならない。なぜならば、それによりセンサ26から供給される信号40の経過が決定され、従ってセンサ信号40の信号理論的処理の方法も限定されるからである。ホィートストンブリッジにまとめられるセンサ26の4つのひずみ計31〜34は、その相互間隔が半分の転動体間隔に相当するように、配置されている(図2参照)。それにより1つのブリッジの2つのひずみ計31及び33又は32及び34が常に同時に転動体24の上を転がるようにすることができる。溝23内でそれに続くホィートストンブリッジの最初のひずみ計31も同様に、先行するブリッジの最後のひずみ計34に対して再び半分の転動体間隔をとっている。この配置により、z個の転動体に対してz/2個のセンサ26が軸受に生じる。それにより力の影響をすべての半径方向から測定することができる。その代わりに、z/2個より多いか又は少ないセンサ例えばz/2−1,z/2+1,z+1又は2z個のセンサが存在していてもよい。一般的に表現すれば、ひずみ計(以下単にDMSとも称される)はなるべくブリッジとなるように配線されて、第1のDMSと第3のDMSとの間隔及び第2のDMSと第4のDMSとの間隔が転動体間隔の整数倍となるようにされる。更に2つのDMS(例えば第1及び第2のDMS)のみを、第3又は第4のDMSの代わりにひずみに感応しないそれぞれ1つの抵抗と共に、それぞれホィートストン半ブリッジとなるようにまとめることも可能である。前述したDMSの代わりに、例えば圧電又は磁気センサのような別のセンサも使用することができる.この場合センサと転動体との異なる関係が生じる。
【0018】
図2は、1つのセンサに対して、外レース22の溝23内におけるひずみ計と転動体24の幾何学的分布を示している。DMS31及びDMS33上を転がる際、一定の供給電圧UBにおいて、転動体の押付けにより生じるひずみ計の増大する変形と共に、ブリッジ出力電圧UA(t)が上昇する。ブリッジ回路において交点にわたって接続されるひずみ計は、同時に転動体上を通されるか又は変形され、それにより出力電圧の上昇は一層強められる。続いてひずみ計DMS31及びDMS33が次第に荷重を除かれ、遂にその最初の抵抗値に再び達し、ブリッジがほぼ平衡する。続いてひずみ計DMS32及びDMS34の上を転動体が転がる際、ブリッジ回路を逆の符号を持つように設定するため、出力電圧の同じ経過が起こるので、最終的に図3のほぼ正弦状の経過が生じる。ほぼ三角形の形状を持つ4つのひずみ計36,37,38,39をもつセンサ29の別の構成が破線で示され、それにより軸受20に作用する軸線方向力の検出が可能になる。軸線方向力の測定のためひずみ計を構成する別の可能性も当然存在する。
【0019】
軸受20又は対応するセンサ26に作用する力が大きいほど、転動体24からひずみ計に及ぼされる面圧も大きい。これによりブリッジ回路の抵抗値が変化し、従ってブリッジ出力電圧の振幅もそれに応じて大きくなる。従って軸受に及ぼされる力とブリッジ回路の出力電圧UA(t)との間に所定の関係が存在して、伸び又は伸びにより生じる力の評価に利用可能である。図3によれば、平均して約0.03Vの信号偏移が生じる。
【0020】
更に信号周波数fは、固定した外レース22において転動体24がひずみ計の上を転がる頻度に相当し、この頻度は、軸の回転数に対して次の数学的関係にある。
ここで変数zは転動体24の数を示し、Dwは転動体の直径、Dpwはピッチ円直径、αは円筒ころ軸受において零にセットされている圧力角である。nで軸の回転数U/Minが示され、Hzで周波数を得るため単位U/Hzに換算される。
【0021】
図3からわかるように、精確には同じでない抵抗値を持つブリッジの薄膜構造を転がり軸受鋼上に設ける際工程により生じてセンサ毎に異なるオフセット又はずれを、センサ信号40が持っている。抵抗値の非対称分布の結果、ブリッジ出力端に直流成分が生じる。別のオフセットが、転がり軸受の作動中に、周囲条件の変化例えば温度変化によって生じる。
【0022】
原理的に応用において、転がり軸受における表面欠陥又は汚物粒子上を転がることにより生じる固体伝導音事象が、ほぼ正弦状の基本振動に対して高い周波数の信号成分により、センサ信号中に現れる。図4はこのような転がり軸受欠陥の例を示している。
【0023】
図5は、転がり軸受20の作動パラメータを求めるための本発明による評価装置50のブロック線図を示し、この評価装置は、軸受20の外レース22の溝23内に設けることができるなるべくASICの形に構成されている。それに応じてA/D変換器56におけるセンサ信号40のディジタル化後、続いて低域フィルタ57なるべくFIR(有限インパルス応答)フィルタによる高周波外乱成分の濾波後、2つの並列に設けられるモジュールにおけるセンサ信号の引続く処理が行われる。FIRフィルタ57は、12kHzの限界周波数においてなるべく16次である。フィルタ57例えばもっと高次であってもよいが、その場合ASIC50上に多くの場所を必要とする。各モジュールの始めに、分枝における評価のため重要な情報を含む周波数範囲の重み付けが行われる。上のモジュールにおいて、なるべくfg=3kHzの限界周波数を持つ同様に16次の別のFIRフィルタ58において、低域濾波が行われる。なぜならば、計画された使用のために予想される信号周波数は、最大でフィルタ58の限界周波数まで達する可能性があるからである。濾波限界を設定する際、フィルタモジュールによる振幅に合った伝送に対するより大きい値が、もっと高い周波数の信号成分の抑制に対して設定された。振幅減衰により場合によっては生じる誤りは、計算された信号偏移を高めることにより、後で再び補償される。それから軸受の求められる作動パラメータの決定が、回転数、(信号40の偏移に応じて)半径方向力、軸線方向力及び回転方向の形で行われ、これが対応する機能ブロック51〜54により概略的に示されている。下のモジュールにおいて、高域フィルタ59なるべく16次のIIR(無限インパルス応答)高域フィルタにより、なるべく回転数に関連する周波数が抑制され、機能ブロック55において、固体伝導音の一般に高周波成分が重み付けされ、続いて再処理により適当に評価される。図16a〜16bの流れ図からわかるように、個々の作動パラメータの検出は、必ずしも図2の概略図によって個々の機能ブロック(部分方法又は「評価ユニット」とも称される)51〜55において別々に行われるのではなくて、個々の部分方法又は評価ユニット(機能ブロック51〜55)がかみ合わされて実時間で結果を生じる単一方法で行われるのがよい。
【0024】
FIR フィルタのフィルタ限界は、任意の構造形式の軸受が同じASICで評価可能であるように選ばれるのがよい。従ってフィルタ限界は、信号評価の上の分枝において達成可能な信号対雑音比SNRと多くの軸受形式及び構造形式への知的軸受の費用分配との間の妥協である。ASICの下の分枝においてこの実施例では、6次のプログラミング可能なIIRフィルタを実行する必要がある。しかしそれにより1つの軸受形式に対しても、変化する回転数において、大きい周波数段階でフィルタを調整し、こうして固体伝導音事象のできるだけ最適な評価を行うことが可能である。「回転方向」、「偏移」、「回転数」、「軸線方向力」及び「固体伝導音」のブロックにおいて求められるセンサ信号の特徴は、外レース22の溝23内にあるがここには示してないSPI(逐次周辺インタフェース)バスを介して、軸受の外部にあるが同様に図示してないDSP(ディジタル信号プロセッサ)へ伝送される。DSPは、軸受においてデータ交換を編成し、軸受にあるASICをプログラミングし、又はデータを軸受に問合せるのを担当している。更にDSPにより、個々のセンサ26に作用する力のために、それぞれの信号偏移及び測定個所の幾何学的分布から生じる合力が計算可能である。しかし大体においてこのDSPは、知的軸受と、DSPにより供給される標準化されたインタフェースで軸受からデータを取出しかつ規定に従ってシステムへ作用するか又は装置の監視を行う顧客使用との間のインタフェースを形成する。
【0025】
さてセンサ信号40の評価従ってパラメータとしての回転数、回転方向、軸線方向力及び偏移を求めるためのできるだけ効率的な方法を見出す必要がある。簡単な計算技術手段による評価の可能性は、図6に示すようにセンサ信号が仮想補助線と交差する時に生じる。
【0026】
評価のために必要で補助線に関係しているセンサ信号40の曲線のパラメータが、図6にすべて記入されている。例えば補助線と曲線の順次に続く上昇辺との交点を示す2つの時点tauf1及びtauf2から、センサ信号の周期がわかり、従って式(1)により軸回転数がわかる。従って回転数がオンラインで最短時間内に求められる。回転数の計算のために、センサ信号40の下降辺と補助線42との交点tab1及びtab2も当然利用可能である。与えられたセンサ配置により、半波において回転数を求めることも可能であり、これは特に低い回転数において有意義と思われる。上昇辺交点及び下降辺交点の評価の組合わせでは、軸回転数の値へのアクセス時間が更に半分にされる。なぜならば、各半周期の間に新しい値が利用可能なので、低い回転数においても、情報が速やかに利用可能だからである。補助線42とセンサ信号40との交点がわかると、ちょうど評価が上昇辺で行われるか又は下降辺で行われるかが、非常に簡単に確認される。評価がちょうど曲線の上昇辺に対して行われると、本発明による方法は、下降辺と補助線42との交点に達するまで、時間にわたって存在するセンサ信号40のサンプル値にある最大値を探求する。それに続いて、存在するサンプル値にある最小値が、上昇辺のための次の交点が検出されるまで、探求される。こうして各信号周期に対して最大値ymax及び最小値yminが得られて、互いに減算されて信号偏移従ってこのセンサ26のために記録される半径方向力に対する補完を示す。ここでも連続して交互に差ymax1−ymin1及びymax2−ymin1を形成することにより、偏移値従って半径方向力へのアクセス時間が半分にされる。
【0027】
測定ブリッジ内におけるDMSは位置の図7に示す僅かな変更により、補助線で回転方向の判定基準も信号経過に入れられる。そのためセンサ27において、DMS対(図ではDMS2 32’及びDMS4 34’)が、明らかにするため破線で示すひずみ計32及び34に対して、図2からわかる配置に従って、今や回転方向Aに移動されて、一層早い時点に転動体がその上を転がるようにしている。それによりセンサ信号40の経過において、回転方向の検出に利用できる非対称が生じる。原理をわかり易くするため、図における状態は、実際の非対称に比較して誇張されている。ひずみ計32’汲び34’の移動のため、信号40の極値が時間方向に互いに移動しているので、例えば最大値が、回転方向に応じて、tauf1とtab1の時間的中心(図8の横座標上に0で示す)の左又は右にあり、図8による配置におけるtauf1及びtab1は、図2による配置に対して変っていない。従って回転方向は例えば次式からわかる。
【0028】
容易にわかるように、センサ信号40の評価はこうして非常に簡単に行われる。しかしこの場合も、補助線42を適当に構成することが困難である。原理的には、オフセットを持つ信号40の平均値が補助線42として与えられる。しかしこれは、平均値の従来の計算により、少なくとも1つの周期の間値を一時記憶するための適当な記憶場所を必要とする。例えば100r.p.m.の遅い回転数から出発すると、約11Hzの信号周波数が生じる。従って78kHzのシステムの使用されるサンプリング周波数では、1周期の間にそれぞれ14ビットの語幅を持つ約7000の値を一時記憶せねばならず、これは0.35μmの構造大きさに基く集積密度により、約90mm2のチップ面積に相当する。従って幾何学的規定のため、平均値の従来の形成では、このような方法は実用不可能である。更にオンライン評価も不可能である。
【0029】
しかし信号40の探求される平均値が、信号40と交差する補助線42として帰納的/適合的に評価されることによって、解決策が見出される。平均値のこの帰納的/適合的評価が本発明の好ましい実施形態である。即ち信号40と交差しかつ大体において信号の包絡線に対して平行であるか又はこの信号にほぼ追従する補助線が選ばれると、一般に充分である。
【0030】
伸びに感応するセンサ26から供給される曲線経過の平均値を評価するという上記の課題設定のために、次のスカラー式(3)が生じる。
ここで時点k及びK(k)におけるセンサ信号y(k)の線形期待値の推計学的変数E{Y}(k)は帰還ゲインであるか、又は換言すれば適合定数である。それにより軸受20の作動パラメータの評価に対する著しい障害が乗越えられ、回転数、回転方向、半径方向力及び軸線方向力を求めるための上述した簡単な方法が実行可能である。こうして計算される平均値は信号に適応した特徴を持ち、温度の影響のため場合によっては長時間にわたってゆっくり変化するオフセットに追従する。従って信号40がその平均値に関して不安定な特徴を持っていても、センサ信号40の常に事実に合った評価が保証される。
【0031】
帰還ゲインK(k)を雑音処理に関係して動的に計算することは、実際の使用にとって全く有利である。評価の速さ及び整合性に関して適合評価の設計は、例えば推計学的基準に従って行うことができる。結果は、時間経過において変化する帰還ゲインK(k)である。適応の初めに値K(k)が非常に大きく、それにより探索される値への急速な移行が行われる。引続く時間的経過において、ゲインが指数関数的に減少する。それにより評価への外乱の影響が著しく減少される。しかしそれにより更に生じる機能性は、できるだけ最大の効率では、指数関数的経過の計算の際必要な費用に関係しない。この理由から、本発明による方法における雑音の影響は、それ以上考慮されない。むしろ静的ゲインK(後でc0とも称される)が、実際にもっと有用である。なぜならば、それにより全体として、平均値の評価のための計算費用が非常に少ないからである。全体としてそのために、式(3)により、静的係数K又はcのため及び平均値E{Y}(k)のために、それぞれ1つのレジスタを必要とする。平均値のための評価値を求めるための計算費用は、僅かな基本演算に依拠している。
【0032】
図9は、図3に示すセンサ信号40の平均値43を前述の方法により評価する経過を示している。
【0033】
作動パラメータの計算のために、現在のセンサ信号値の各サンプリングサイクルに得られる平均値が減算される。
【0034】
図示のためK=0.0001の帰還ゲインが選ばれた。平均値43を免れたセンサ信号45の過度特性を図10が示している。約0.5秒後に平均値が得られるので、遅くともこの時点からパラメータを問合わせることができる。しかしt=0.005秒からセンサ信号45は、補助線42である零線と交差する。この時点から既に、本発明による方法は、結果値自体にまだ僅か誤りを持っていても、これらの結果値を供給する。なぜならば、交点は同じ回転数において互いに変化するからである。
【0035】
次の段階で、固体伝導音事象の評価に適した方法従って固体伝導音の検出の理論的基礎が説明される。
【0036】
図5の固体伝導音分枝にある6次のIIRフィルタ59の周波数応答が、SPIバスを介して係数のダウンロードにより、その周波数特性をプログラミングされる。転がり軸受欠陥の検出のために、IIRフィルタに高域フィルタ特性が課されて、高周波の固体伝導音信号を図3によるほぼ正弦状の基本信号から分離する。
【0037】
図11は、フィルタ59の使用に関する典型的な周波数応答を示している。通過帯域の限界周波数は1kHzの所にある。阻止帯域で60dB減衰が行われ、通過帯域において0.0002dBの減衰は無視できる。高域フィルタ59により、第1段階で、図4の円で囲んだ部分に示されるか又は図12に2回円で囲まれて見られるように、固体伝導音事象が抽出可能である。
【0038】
濾波の結果が図13に示されている。原理的にフィルタは、通過帯域及び阻止帯域におけるよい特性のため、固体伝導音事象を実時間で低い周波数から精確に分離することによって、非常に良好な結果を与えるので、濾波された信号44に、センサ信号40の基本振動からもはや何も認められない。それから出発して、閾値が時間軸に対して平行に引かれるように、固体伝導音事象についての自動化された証明を行うことができるであろう。IIRフィルタ59の出力信号44が閾値を超過すると、固体伝導音が存在する。しかし固体伝導音事象と固体伝導音が生じる時間部分との間でフィルタ59の出力端における分離性は非常に高くはない。閾値が充分低い所にあると、フィルタ信号44に重畳される雑音量のため、この閾値が常に超過されることが、原理的に起こり得る。他方これらの誤り警報を避けるため、閾値が高すぎではならない。なぜならば、そうしないと、雑音量が閾値に達しないのみならず、僅かな強さで現れる固体伝導音事象も、もはや検出できないからである。そのため、特に計算容量が不足するため、自動機構を使用できない時に、最適な閾値関数を探求することは非常に困難である。
【0039】
改善の可能性は、固体伝導音信号とフィルタ出力端の基本騒音との比従って信号対雑音比を、この分枝において高めることである。そのためフィルタ59の出力端における2次の通常の統計的積率の計算を使用することができる。
IRフィルタ59の出力値の2乗重み付けのため、固体伝導音事象は騒音処理から著しく強く際立たせられ、検査により実際データに示されたように、一層確実な検出のため閾値が著しく簡単に設けられる。しかしここでも、記憶場所に対して高度の要求を持つ方法を使用できないという制限があるので、通常の2次の統計的積率を、式(4)の従来の形でN値を求めることができない。しかし回転数を求める前述の方法に従って、ここでも計算のための別の方法が見出される。線形期待値を評価する式(4)と同様に、普通の2次の統計的積率のため信号に適合する帰納的な式が得られる。
帰納的な式の結果を適当に組合わせ、結果として生じる信号を評価することによって、固体伝導音の検出精度が更に改善される。例えば分散計算の信号に適合する帰納的バージョンが得られる。
【0040】
さて本発明による方法によって求めることができる作動パラメータと計算された評価値との関連について簡単に説明する。作動パラメータとしての「回転数」、「回転方向」、「半径方向力」及び「軸線方向力」を求める際、平均値評価の結果はもはや直ちには現われないが、このことは品質に対する重要性を減少することはない。むしろこれは、データの「敏速」即ち効率的な評価のため及び作動パラメータを求めるための基礎を形成する。
【0041】
回転方向を求める際、例えばセンサ信号の正の半波の中央軸からの最大値の偏差に対して、約−0.13msの平均値が生じ、これは、使用されるfa=78kHzのサンプリング周波数において、約10のサンプル値に相当する。全記録中における符号は常に0より小さいので、それから一義的に回転方向が関係づけられる。従って異なる回転方向は、偏差の正の符号を生じるであろう。
【0042】
前記の作動パラメータにおいて線形期待値の帰納的計算とは異なり、固体伝導音事象を求める際、2次の統計的積率を求めると、直ちに結果値になる。本発明による方法の作用を示すため、IIRフィルタ59の図14に示す出力信号46から出発し、出力信号46の前の範囲のみが固体伝導音信号を含んでいる。後の範囲は、直接比較を行うことができるように、固体伝導音信号なしの転がり軸受から作成されている。
【0043】
この信号46に、式(5)による2次の通常の統計的積率の帰納的な適合評価を適用すると、結果として生じる信号48において、図15に示すように、最初の部分の著しい強調が生じる。従って固体伝導音事象の出現は、図14による信号46において出現した場合より著しくよく閾値にわたって検出される。
【0044】
式(5)による2次の通常の積率の前記の帰納的な適合評価が信号48に適用され、続いて式(3)を同じように使用しながら式(6)によるその分散が計算されると、得られる信号48の評価可能性が更に高まる。
【0045】
これに反し分散が既に信号46において計算されると、これも信号48の評価可能性を改善するが、信号48の分散を計算する場合のような程度には改善しない。しかしそれにより若干の計算が節約され、それにより速い処理が行われる。
【0046】
図5の固体伝導音分枝における著しい信号対雑音比に加えて、結果が閾値を超過すると、時間情報が評価され、これから生じる周期に基いて、誤りの源の指定が行われる。帰還ゲインは、この例ではK1=0.8に設定された。
【0047】
本発明による方法の精度は2つの方向に重要である。即ち振幅範囲における精細度および時間範囲における精細度である。知的軸受から求められる信号偏移及び固体伝導音の値の精度は、アナログ−ディジタル変換器の量子化及びレベル制御に関係している。回転数精度は、回転方向と同様に、システムのサンプリングラスタにより決定される時間精細度によって規定され、後者の程度は軸受の定性的(定量的でない)特徴である。
【0048】
テストのために実現されるASICの仕様書によれば最小3.0V及び最大3.6Vであってもよい供給電圧に関係して、また1Vの供給電圧当たり−3mV〜+3mVのアナログ−ディジタル変換器のいわゆる動的信号振幅に関係して、3.3Vの仮定した平均供給電圧において、変換すべきセンサ信号に対して−9.9mV〜+9.9mVの電圧範囲が得られる。これは19.8mVの最大信号偏移に相当する。実行されるアナログ−ディジタル変換器の語長は、外乱のない場合14ビットなので、1つの数字に1.2μVの電圧値が写像されている。ここで考察されている円筒ころ軸受の最大荷重を50kNと仮定する。それによりアナログ−ディジタル変換器の最大レベル制御を持つ完全な値範囲にわたって分布して、数字毎に約3Nの理論的精度が生じる。従って本発明による方法に対する要求は一層よく満たされる。なぜならば、周囲構造、軸受及びセンサの伝達系により、著しく粗い量子化が行われるからである。測定は200Nの範囲にある精細度を生じる。時間方向における量子化は、テストのために使用される伝達系においてちょうど78.125kHzの所にあるこの系のサンプリング周波数によって規定される。そのため理論的に最大に生じる回転数(及び回転方向)の誤りが、サンプリング周波数の逆数から誘導される。即ちTa=1/fa=12.8μso問題となっているすべての軸受のひずみ計上を転がる転動体の最大に起こり得る3kHzの転がり周波数では、3.8%の最大誤りが生じる。これは、測定における相対誤りと系の生じるデータ転送速度との間の非常に良好な妥協である。
【0049】
次に図16a〜16hに示す流れ図により、方法の好ましい実施形態が説明され、互いに関連する方法部分において、前記のすべての作動パラメータを求めることができる。しかしよりわかり易くするため、それぞれただ1つの作動パラメータの検出に説明が細分され、簡単化するため、経過する時間に対するパラメータ「T」が省略される。従って経過する時間は潜在的にパラメータ「k」に納まっている。流れ図相互の接続は結合個所V1〜V8によって示されている。
【0050】
既に述べたように、転がり軸受20の回転の際、各センサ26が、その回転位置に関係する波状の信号40を、例えば図3に示すように供給する。信号40はなるべく等間隔のサンプリング時点k,k+1,k+2・・・にサンプリングされ、その結果生じるサンプル値x*(k),x*(k+1),x*(k+2)・・・が、本発明による方法のそれぞれの部分に従って処理される。
【0051】
k=0について、まず信号40が、その瞬時値を求めるため、サンプル値x*(0)としてサンプリングされ、評価値E(x*(k=0))の開始値が、信号40の期待値として規定される。続いて順序変数kが1だけ高められる。続いて信号40が、時点k+1に、その瞬間値をもとめるため、(k+1)番目のサンプル値x*(k+1)としてサンプリングされる。
【0052】
回転数
図16aによれば、段階S100において(k+1)番目の評価値E(x*(+1))が、先行するk番目の評価値E(x*(k))と、適合定数c0と(k+1)番目のサンプル値x*(k+1)からこのk番目の評価値E(x*(k))を減算した結果との積との和として、計算される。それから段階S101において、(k+1)番目のサンプル値x*(k+1)から、段階S100において計算された評価値D(x*(k+1))が減算され、差が(k+1)番目の計算値として引続く方法のために使用される。c0に対して0<c0<1が適用される。段階S101の計算において中括弧内にある最後の項は、回転数の計算にとって重要ではなく、従って考慮しなくてよい。段階S102において、計算されたこの(k+1)番目の計算値x(k+1)の符号が、この方法部分の先の実行の対応するk番目の計算値x(k)の符号と比較される。それから方法が2つの分枝に分岐する。
【0053】
段階S102において比較された符号が同じである場合、即ち信号40が符号変化せず、換言すれば零交差しなかった場合、kが1だけ高められ、方法段階S100〜S102が反復される。換言すれば、回転数を求めるため図16cによる方法段階S302〜S316は必要でない。段階S102において比較された符号が同じでない場合、即ち信号40が零交差しなかった場合、図16bの段階S203において、現在の段階S102の(k+1)番目の計算値x(k+1)が、段階S101の先行する実行において既に求められたk番目の計算値x(k+1)より大きいか否かが比較される。換言すれば、信号40が上昇辺にあるか下降辺にあるかが検査される。図16aによる方法段階S108,S110及びS112も、回転数を求めるためには必要でない。なお零経過の検査は、それにより、方法において信号40のサンプリングのどの段階にあるかが常にわかるという、付加的な利点を与える。零交差はいわば「ナビゲージョンシステム」であり、検出された測定値の指定を容易にする。このために述べるべきことは、例えばセンサ26,27又は29の構造の変化の際、零交差がいわばx軸上で「しっかりくくりつけられ」ているが、信号の形状は例えば図8に非対称により示されているように変化する。
【0054】
x(k+1)>x(k)を持つ段階S203において、信号が上昇辺にあることが明らかである場合、段階S210において、現在の計算値x(k+1)がちょうど零であるか否かが検査される。yesの場合、この計算値が生じた時点が、段階S214において、上昇辺における零交差の時点tauf2(図6参照)として固定的に保持される。しかしnoの場合、段階S212において、上昇辺における零交差の時点tauf2が、両方の計算値x(k+1)とx(k)との間の線形補間により求められる。この線形補間は、本発明による方法の好ましいやり方である。その代わりに、線形補間のための計算を省略するために、利用可能な近似として、零交差の起こる直前の時点又はその起こる直後の時点も利用することができ、その場合引続く方法において、零交差の起こる前又は後の同じ時点を常に考慮せねばならないであろう。その場合図16dの段階S404において、「上昇する」周期長ΔTaufが、上昇辺における2つの零交差の差、即ち今求められた「新しい」辞典tauf2と前の実行において求められた「古い」時点tauf1との差の形式により、計算される。続いて段階S406において、「新しい」時点tauf2が「古い」時点電tauf1として記憶され、それにより「上昇する」周期長ΔTaufの新たな計算の際これを利用することができる。段階S408は回転数を求めるためには必要ではなく、段階S410において「上昇する」周期長ΔTaufの出力のための出力フラグがセットされ、即ちその計算のためプロセッサに命令が与えられ、これが回転数の尺度として出力される。方法の一番最初の実行の際即ち「新しい」時点tauf2を最初に求める際、「古い」時点tauf1はまだ利用可能でない。従って2回目に「新しい」時点tauf2が計算された時に初めて、「上昇する」周期長ΔTaufが出力される。それからkが1だけ高められ、方法が段階S100で続行される。
【0055】
これに反し段階S203においてx(k+1)>x(k)でない場合、これは下降辺に信号があることを意味する。この場合段階S230,S232又はS234が前述した段階S210,S212又はS214と同じように実行され、その際tauf2の代わりに、下降辺における零交差の時点tab2が求められる。その場合段階S404及びS406と同様に、図16eの段階S504及びS506において、「新しい」時点tab2と「古い」時点tab1との差の形成により、「下降する」周期長ΔTabが計算され、段階S510において回転数の尺度として出力される。それから同様にkが1だけ高められ、方法が段階S100で続行される。
【0056】
従って周期毎に2回、回転数が、「上昇する」周期長ΔTauf及び「下降する」周期長ΔTabの形で求められる。
【0057】
原理的には、2つの最小値または2つの最大値の間隔によって周期長を求めることも可能であろう。しかしこれらの最小値又は最大値は比較的幅の広い「円頂」を形成し、従って零交差のように精密に検出されないので、その使用は特に雑音の場合不精確であり、従って好ましくない。
【0058】
それ以外の作動パラメータを求める際、既に前述した段階は、いずれにせよ新たに説明する必要がないので、反覆を避けるため再度詳細には示されない。
【0059】
軸線方向力
軸線方向力を求める際、段階S100及びS102は回転数を求める際と同じであり、回転数を求める際使用される段階S101に対するただ1つの相違は、計算値x(k+1)を決定する際補助量huf−hlfが加算され、即ち段階S101の計算において中括弧内にある最後の項が考慮されないことである。即ち補助線42が零線と一致しているのではなく、その下にあることである。補助量hub−hlfは自由に選ぶことができるが、0〜0.5の数(hlf)と信号偏移(hub)との積から構成されるのが好ましい。
【0060】
段階S203、上昇辺用の段階S210,S212及びS214と下降辺用の段階S230,S232及びS234は、回転数を求める場合と同じように実行される。
【0061】
上昇辺について、段階s402において、下降辺の「新しい」時点tab2を上辺の「新しい」時点tauf2から減算することによって、負の半波が持続する時間間隔(Δt_nhw)が求められる。図6はこれとは異なっている。なぜならば、この図は、対応する値tauf1,tauf2,tab1,tab2が種々の方法実行において「大きく移動する」こと、即ちその記号が方法の進行中に順次に変化することを考慮していないからである。それからこのような順次変化を示す段階S406が実行される。
【0062】
段階S101〜S406の実行に対し並列に、図16a及び図16fに「並列分枝」で示されかつ図16fに段階S601で始まる別の方法分枝が実行される。段階S601は、補助量hub−hlfが加算されずに減算される点でのみ、段階S101と相違している。それはもっと上にある適当な補助線と信号40との交差を行うことにほかならない。段階S101の計算値x(k+1)に対して一層よく区別できるようにするため、段階S601において生じる計算値がy(k+1)で示され、この区別は段階S602,S603,S610,S612,S614,S640,S632及びS634において維持され、そうでない場合これらの段階は「主分枝」における段階S103,S203,S210,S212,S214,S230.S232及びS234と同じように経過する。「主分枝」において求められる零交差が並列分枝において求められる零交差と異なることを明らかにするため、後者の零交差は「*」を付けられている。下降辺については、段階S638において、上昇辺の「新しい」時点t*auf2を下降辺の「新しい」時点t*ab2から減算することによって、段階S638において、正半波が持続する時間間隔(Δt_phw)が求められる。続いて段階S406と同様な段階S506が実行される。
【0063】
それから段階S408及び/又は段階S508において、段階S638において求められた時間間隔Δt_phwを、段階S402において求められた時間間隔Δt_nhwから減算することができ、この差Δt_phw−Δt_nhwの符号は、軸受20に作用する軸線方向力の方向ax_dirを示し、段階S410及び/又はS510において出力可能である。更に段階S409及び/又はS509において、差Δt_phw−Δt_nhwの値ax_forを軸線方向力の大きさの尺度として求め、段階S410及び/又はS510において一緒に出力することができる。
【0064】
それにより軸受20に作用する軸線方向力も求められる。
【0065】
半径方向力
半径方向力を求める場合、段階S100,S101及びS102は回転数を求める場合と同じである。段階S102において比較される符号が同じである場合、即ち零交差が行われなかった場合、段階S302において、段階S101の(k+1)番目の計算値x(k+1)の符号が1に等しいか否か、即ち信号40が正の半波にあるか否かが検査される。yesの場合段階S304において、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最大値max_wertより大きいか否かが検査され、yesの場合、段階S305において、この(k+1)番目の計算値x(k+1)が信号40の新しい最大値max_wertとして記憶され、それからkが1だけ高められ、方法が段階S100で続行される。noの場合、段階S308において信号40の偏移hubが、その最大値max_wertと最小値min_wertとの差max_wert_min_wertの形式により求められ、最小値min_wertを求めることは後述される。もちろん本発明による方法において、最大値max_wertも最小値min_wertも存在する時に初めて、偏移を計算することができる。それからkが1だけ高められ、方法が段階S100で続行される。段階S302において、(k+1)番目の計算値x(k+1)の符号が1に等しくなく、即ち信号40が負の半波にあることがわかると、同様に段階S304,S315及びS318において、信号40の最小値min_wertが求められ又は記憶され、偏移が計算される。それから再びkが1だけ高められ、方法が段階S100で続行される。ここで述べておくべきことは、逆の差即ちmin_wert−max_wertによっても、従って同様に信号周期毎に2回、信号偏移を計算して出力することができることである。
【0066】
段階S102において、符号変化又は零交差が行われたことがわかると、段階S108において出力フラグがセットされ、信号偏移を軸受20に作用する半径方向力の尺度として出力することができる。段階S110において信号偏移が今まで求められた最大信号偏移hub_maxより大きいか否かが検査される。yesの場合、求められた現在の信号偏移が新しい最大信号偏移hub_maxとして記憶される。これは、強い衝撃を知るのに役立つ。最大信号偏移hub_maxの値は利用者によりいつでも消去可能である。
【0067】
それから再び段階S203において、信号が上昇辺にあるか下降辺にあるかの事例区別が行われる。第1の場合信号40の最大値max_wertが、第2の場合最小値min_wertが零にリセットされ、kが1だけ高められ、方法が段階S100で続行される。
【0068】
それにより半径方向力も、転がり軸受20の別の作動パラメータとして求められる。
【0069】
上述した説明からわかるように、最小値と最大値との間の零通過が検出されている時にのみ、最小値又は最大値がそれ自体として認められる。それにより、信号の「谷」において、場合のよってはそれと結びつく下位極値が(誤まった)最小値又は最大値として検出されることがないようにすることができる。
【0070】
回転方向
回転方向を求める際、段階S100,S101及びS102は、回転数を求める場合と同じである。
【0071】
段階S102において比較される符号が同じである場合、即ち零交差が起こらなかった場合、段階S302(図16c)において、段階S101の(k+1)番目の計算値x(k+1)の符号が1に等しいか否かが、即ち信号40の正の半波にあるか否かが検査される。yesの場合、段階S304において、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最大値max_wertより大きいか否かが検査され、yesの場合、段階S306において、この(k+1)番目の計算値x(k+1)(即ちmax_wert)が生じた時点max_wert_t(図8におけるtmax1及び式(2)に相当する)が記憶され、それからkが1だけ高められ、方法が段階S100で続行される。段階S302において、(k+1)番目の計算値x(k+1)が1に等しくなく、即ち信号40が負の半波にあると、段階S314におけるのと同じように、この(k+1)番目の計算値x(k+1)が信号40の今まで求められた最小値min_wertより小さいか否かが検査され、yesの場合、段階S315において、この(k+1)番目の計算値x(k+1)(即ちmin_wert)が生じた時点が記憶され、それからkが1だけ高められ、方法が段階S100で続行される。
【0072】
段階S102において比較される符号が同じでない場合、即ち信号40が零交差を行った場合、図16bの段階S203において、別の事例区別において、現在の段階S101の(k+1)番目の計算値x(k+1)が、段階S101の以前の実行の際既に求められたk番目の計算値x(k)より大きいか否かが比較される。換言すれば、信号40が上昇辺にあるか又は下降辺にあるかが検査される。信号40が上昇辺にある場合、段階S204において回転方向が次のようにして求められる。即ちその意味を後述される最小補助変数min_t_refが、信号40の最小値の発生時点min_wert_tから減算され、結果が2により除算され、この時から最小補助変数min_t_refの減算の結果が、信号40の最大値発生時点max_wert_tから減算される。この値の符号signは、転がり軸受20の回転方向symの情報として使用され、それにより段階S208において回転方向sym用の出力フラグがセットされ、これが出力される。しかし出力の前に、段階S206において、更に信号40の最小値発生時点min_wert_tが、新しい最小補助変数min_t_refとして記憶される。それによりこの最小補助変数min_t_refの意味も明らかにされている。続いてkが1だけ高められ、方法が段階S100で続行される。しかし信号40が下降辺にある場合、(段階S204におけるのと同様に)段階S224において、回転方向symが次のようにして求められる。即ちその意味を同様に後述される最大補助変数max_t_refが、信号40の最大値の発生時点max_wert_tから減算され、結果が2により除算され、この時から最大補助変数max_t_refの減算の結果が、信号40の最小値の発生時点min_wert_tから減算される。この値の符号signは,再び転がり軸受20の回転方向の情報として使用され、それにより段階S228において回転方向symの出力フラグがセットされ、これが出力される。しかし出力の前に段階S216において、更に信号40の最大値の発生時点max_wert_tが新しい最大補助変数max_t_refとして記憶される。それにより最大補助変数max_t_refの意味も明らかにされている。
【0073】
従って転がり軸受20の回転方向も求められる。
【0074】
回転数、回転方向軸線方向力及び半径方向力を求めるそれぞれの方法部分において単一の適合係数c0の使用により、この適合定数が信号40の期待値の計算の際いつも同じであることを、暗に前提としていた。しかし種々の方法部分において必要な場合、種々の作動パラメータの計算にとって有利であれば、種々の適応定数を使用することができる。
【0075】
次に固体伝導音の算出の説明が続く。
【0076】
固体伝導音
このためk=0に対して、信号40が、その瞬時値を求めるため、サンプリング開始値x*(0)としてサンプリングされる。評価値E(x*(k=0))は信号40の期待値として必要とされず、後述するように、濾波サンプル値v(k=0)の2次の通常の統計的積率E{V2}(k=0)が必要とされる。続いて順序変数kが1だけ高められる。続いて信号40が、その瞬時値を求める時点(k+1)に(k+1)番目のサンプル値x*(k+1)としてサンプリングされる。
【0077】
図16gにおいてx*(k)で略記されたサンプル値x*(k),x*(k+1),x*(k+2)・・・は、段階S702において、フィルタ係数を自由にプログラミング可能な少なくとも5次のIIR高域フィルタ59を通る。それによりセンサ信号40の低周波成分が除去される。フィルタ59の出力端には、図13に示すように、ここではv(k)で略記されるフィルタサンプル値v(k),v(k+1),・・・が現れる。段階S704において式(5)により、「新しい」フィルタサンプル値v(k+1)に対する2次の通常の統計的積率E{V2}(k+1)が計算される。このため「新しい」フィルタサンプル値v(k+1)の2乗v2(k+1)から、「古い」フィルタサンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)が差引かれ、この差が適応定数c1と乗算され、乗算の結果が「古い」フィルタサンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)に加算される。c1に対して0<c1<1が成立する。2次のこの通常の統計的積率が図15の左側に示されている。それから出力信号outputが、段階S710において定量的な誤り信号として出力され、更に出力信号outputが段階S719において閾値と比較され、この閾値を上回る場合、定性的な値として出力され、これが段階S720において「出力フラグ固体伝導音」で示されている。更に段階S712において、出力信号outputが今まで検出された(利用者により任意に消去可能な)最大出力信号Output_maxを超過しているか否か検査され、段階S714においてこの出力信号が新しい最大出力信号Output_maxとして記憶され、それから段階S716において出力され、それが「出力フラグOutput_max」で示されている。
【0078】
引続く処理のために、わかり易くするため、段階S704の計算からの出力値E{V2}(k+1)が簡略化してu(k+1)示される。段階S706において、段階S704からわかった2次の通常の統計的積率の計算が行われるが、u(k+1)に対する2次の通常の統計的積率E{V2}(k+1)を計算するため、値u(k)に基いて行われる。段階S704において使用される適応定数c1の代わりに、適応定数c2が使用され、これに対して0<c2<1が成立する。しかしc1=c2であってもよい。段階S707において、式(3)によりu(k+1)の期待値E{U}(k+1)が計算される。このためu(k+1)kara,u(k)の期待値E{U}(k)が減算され、この差が適応定数c3(これに対して0<c3<1が成立する)と乗算され、乗算の結果が期待値E{U}(k)に加算される。c3は必ずしもc1及び/又はc2と相違していなくてもよい。それから段階S708において、段階S707の結果の2乗を段階S706の結果から減算することによって、分散σ2(k+1)が計算される。それから前記の可能性で再び出力(選択的に段階S710及び/又はS717及び/又はS720)が行われ、その際段階S706〜S708により、センサ信号及び雑音の検出及び区別の精度は、段階S704による出力後におけるより良い。
【0079】
それにより転がり軸受20に生じる固体伝導音も検出される。
【0080】
多くの試験において、本発明による方法が探求される作動パラメータを非常に確実に求め、課された課題のために最適に処理することがわかった。線形期待値及び2次の通常の統計的積率の式を使用することにより、生じるデータの評価により、作動パラメータをASICにおいて最小の空間で確実かつ速やかに求めることが可能である。本発明の方法は、特に、主として比較及び加算を使用し、費用のかかる乗算又は除算を使用せず、最小の記憶場所しか必要としない簡単な記憶装置に基いているので、非常に効率的である。
【0081】
前記の説明では、本発明による方法がASICで実行され、従って固定的に配線される装置において実行されることを前提としていた。しかし本発明による方法がソフトウエアの形即ちコンピュータプログラムの形で普通の計算機において実行可能なことは、明らかである。
【0082】
個々の実施形態を参照して説明した本発明の特徴、例えば流れ図又は方法の理論的基礎の説明の個々の段階は、異なるように示されているか技術的な理由から禁じられる場合を除いて、異なる実施形態において存在していてもよい。
【図面の簡単な説明】
【0083】
【図1】 本発明による転がり軸受の概略図を示す。
【図2】 本発明による転がり軸受の外側溝にあるホイートストンブリッジにおけるひずみ計の配置を概略的に示す。
【図3】 本発明による転がり軸受において発生されるセンサ信号の典型的な例を示す。
【図4】 固体伝導音事象が起こるセンサ信号を示す。
【図5】 本発明によるASICのブロック線図を示す。
【図6】 作動パラメータを評価する基準点が示されているセンサ信号を示す。
【図7】 軸受に作用する軸線方向力を検出する装置の図2に類似な図を示す。
【図8】 回転方向を求める測定原理を説明するための図を示す。
【図9】 平均値の評価の時間的経過のグラフを示す。
【図10】 平均値を除かれたセンサ信号の移行特性のグラフを示す。
【図11】 固体伝導音分枝にあるIIR高域フィルタの周波数応答を示す。
【図12】 半径方向荷重を受けかつ2つの固体伝導音事象が生じている軸受のセンサ信号を示す。
【図13】 IIR高域フィルタの出力端における固体伝導音信号のグラフを示す。
【図14】 IIR高域フィルタの出力信号のグラフを示し、信号が左側で固体伝導音を持ち、右側には固体伝導音を持っていない。
【図15】 図14におけるのと同じ信号の部分のグラフを示すが、信号の2次の通常の統計的積率は帰納的に計算されている。
【図16a】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16b】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16c】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16d】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16e】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16f】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16g】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【図16h】 すべてのパラメータを求めるための本発明による方法の好ましい実施形態の流れ図の一部を示す。
【特許請求の範囲】
【請求項1】
回転する転がり軸受(20)の特に回転数、回転方向、半径方向力、軸線方向力又は固体伝導音事象のような作動パラメータを求める方法であって、転がり軸受(20)にセンサ装置(26;27;29)が取付けられて、転がり軸受(20)の回転の際その回転位置に関係する波状信号(40)を供給し、この信号(40)がサンプリング点k,k+1,k+2,・・・でサンプリングされ、それによりサンプル値x*(k),x*(k+1),x*(k+2),・・・が求められ、
A)評価により回転数、回転方向、半径方向力及び/又は軸線方向力を求めるため、信号(40)と交差しかつその包絡線にほぼ平行である補助線(42)が作図され、作動パラメータがこれに基いて求められ、かつ/又は
B)固体伝導音事象を求めるため、濾波サンプル値v(k),v(k+1),v(k+2),・・・を得るための高域フィルタ(59)において、サンプル値x*(k),x*(k+1),x*(k+2),・・・が濾波され、濾波サンプル値v(k),v(k+1),v(k+2)の少なくとも2次の統計的積率E{V2}(k),E{V2}(k+1),E{V2}(k+2)の評価により、現れる固体伝導音が求められ、
ここでkは経過した時間の順序変数としての整数である、作動パラメータを求める方法。
【請求項2】
作動パラメータとして回転数を求め、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて順序変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められた(k+1)番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実効の対応するk番目の計算値x(k)の符号と比較し(S102)、
f)段階e)において比較された符号が同じである場合、kを1だけ増大し、段階b)〜f)を反復し、そうでない場合現在の段階d)の(k+1)番目の計算値x(k+1)が段階d)の以前の実行のk番目の計算値x(k)より大きいか否かを比較し(S203)、
g)段階f)でx(k+1)>x(k)が生じる場合、段階e)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(tauf1,tauf2)を規定し(S210,S212,S214)、kを1だけ増大し、段階f)において再びx(k+1)>x(k)が生じるまで、段階b)〜g)を反復し、そうでない場合、段階e)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(tab1,tab2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g)を反復し、
h)段階g)における異なる実行において求められた時点(tauf1,tauf2;tab1,tab2)の差(ΔTauf;ΔTab)を形成し(S404;S504)、この差(ΔTauf;ΔTab)を、転がり軸受(20)の回転数に相当する値として出力し(S510;S410)、かつなるべく段階b)から方法を続行し、
c0に対して0<c0<1が成立するようにする
請求項1に記載の方法。
【請求項3】
段階g)における異なる実行において規定される時点(tauf1,tauf2;tab1,tab2)を、段階f)からの等しくない符号を持つ両方の計算値の間の補間(S212;232)により求めることを特徴とする、請求項2に記載の方法。
【請求項4】
作動パラメータとして軸線方向力が転がり軸受(20)に加わる際波状信号(40)が変化するように、センサ装置(29,36,37,38,39)を構成し、次の段階を含む、
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて順序変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d1)段階b)において求められた(k+1)番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、補助量(hub,hlf)を加算し、結果を(k+l)番目の計算値x(k+1)として使用し、
e1)段階d1)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d1)の以前の実行の対応するk番目の計算値x(k)の符号と比較し(S102)、
f1)段階e1)において比較された符号が同じである場合、kを1だけ増大し、段階b)〜f1)を反復し、そうでない場合現在の段階d1)の(k+1)番目の計算値x(k+1)が段階d1)の以前の実行のk番目の計算値x(k)より大きいか否かを比較し(S203)、
g1)段階f1)でx(k+1)>x(k)が生じる場合、段階e1)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(tauf1,tauf2)を規定し(S210,S212,S214)、kを1だけ増大し、段階f1)において再びx(k+1)>x(k)が生じるまで、段階b)〜g1)を反復し、そうでない場合、段階e1)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(tauf1,tauf2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f1)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g1)を反復し、
i1)段階g1)の第2の選択肢において規定された時点(tab2)を、段階g1)の第1の選択肢において規定された時点(tauf2)から減算し、差を負の半波の時間間隔(Δt_nhw)として使用し、
d2)段階c)において計算された(k+1)番目の評価値E(x*(k+1))及び補助量(hub・hlf)を、段階b)において求められたk+1番目のサンプル値x*(k+1)から減算し(S601)、結果を(k+1)番目の計算値y(k+1)として使用し、
e2)段階d2)において計算された(k+1)番目の計算値y(k+1)の符号を、段階d2)の以前の実行の対応するk番目の計算値y(k)の符号と比較し(S602)、
f2)段階e2)において比較される符号が等しい場合、kを1だけ増大し、段階b)〜f2)を反復し、そうでない場合、現在の段階d2)の(k+1)番目の計算値y(k+1)が段階d2)の以前の実行の対応するk番目の計算値y(k)より大きいか否か比較し(S603)、
g2)段階f)でx(k+1)>x(k)が生じる場合、段階e2)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(t*auf1,t*auf2)を規定し(S610,S612,S614)、kを1だけ増大し、段階f2)において再びx(k+1)>x(k)が生じるまで、段階b)〜g2)を反復し、そうでない場合、段階e2)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(t*ab1,t*ab2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f2)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g2)を反復し、
i2)段階g2)の第1の選択肢において規定された時点(t*auf2)を、段階g2)の第2の選択肢において規定された時点(t*ab2)から減算し、差を正の半波の時間間隔(Δt_phw)として使用し、
その際段階d2)〜i2)がなるべく段階d1)〜i1)と並行して経過するようにし、
j) 段階i1)及びi2)において求められた時間間隔(Δt_nhw,Δt_phw)の差(Δt_phw−Δt_nhw)を形成し(S408,S508)、
この差(Δt_phw−Δt_nhw)の符号(ax_dir)を、転がり軸受(20)に作用する軸線方向力の方向に相当する値として出力し(S510;S410)、その際c0に対して0<c0<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項5】
段階g1)及びg2)において規定された時点(tauf1,tauf2;tab1,tab2;t*auf1,t*auf2;t*ab1,t*ab2)を、段階f1)又はf2)からの等しくない符号を持つそれぞれ両方の計算値の間の補間(S212;S232;S612;S632)により求めることを特徴とする、請求項4に記載の方法。
【請求項6】
軸線方向力の大きさの尺度として、段階j)において形成された差(Δt_phw−Δt_nhw)の値(ax_for)の計算(S409,S509)を実行し、かつ出力することを特徴とする、請求項4又は5に記載の方法。
【請求項7】
作動パラメータとして半径方向力を求め、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて実行変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められたk+1番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実効の対応するk番目の計算値x(k)の符号と比較し(S102)、
k)段階e)において比較された符号が同じである場合、段階d)の(k+1)番目の計算値x(k+1)の符号が正であるか否か検査し(S302),正の符号が生じる場合、段階e)において等しくない符号が検出されるまで、段階b)〜k)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値(max_wert)を記憶し(S305)、そうでない場合、段階e)において等しくない符号が検出されるまで、段階b)〜k)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値(min_wert)を記憶し(S315)、段階d)において計算されたこれらの(k+1)番目の計算値x(k+1)の最大値(max_wert)と最小値(min_wert)との差(hub)を計算し、この差(hub)を転がり軸受(20)に作用する半径方向力に相当する値として出力し(S108),なるべくkを1だけ増大し、段階b)から方法を続行し、段階e)において比較された符号が等しくない場合、段階d)において計算された(k+1)番目の計算値x(k+1)の最大値(max_wert)又は最小値(min_wert)を0にリセットし、kを1だけ増大し、段階b)により方法を続行し、
その際c0に対して0<c0<1が成立するようにする、
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項8】
段階k)において正の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最大値(max_wert)より大きいか否かの検査(S304)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)を、差(hub)の計算(S308)のため新しい最大値(max_wert)として記憶し(S305)、
負の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最小値(min_wert)より小さいか否かの検査(S314)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)を、差(hub)の計算(S308)のため新しい最小値(min_wert)として記憶する(S315)
ことを特徴とする、請求項7に記載の方法。
【請求項9】
段階k)の第1の実際の際、差(hub)を更に最大差(hub_max)として記憶し、段階k)の各実行の際、現在計算される差(hub)の値が最大差(hub_max)より大きいか否かの比較(S110)を実行し、そうである場合、この現在計算される差(hub)を、なるべく利用者により消去可能な新しい最大差(hub_max)として記憶することを特徴とする、請求項7又は8に記載の方法。
【請求項10】
作動パラメータとして回転方向を求め、波状信号(40)が異なる回転方向では異なるようにセンサ装置(25,31,32’,33,34’)を構成し、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて実行変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められたk+1番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実行の対応するk番目の計算値x(k)の符号と比較し(S102)、
l)段階e)において比較された符号が同じである場合、段階d)の(k+1)番目の計算値x(k+1)の符号が正であるか否かを検査し(S302)、正の符号が生じる場合、段階e)において等しくない符号が検出されるまで、段階b)〜l)を反復し、今まで段階dにおいて計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(max_wert_t)を記憶し(S306)、そうでない場合、段階e)において等しくない符号が検出されるまで、段階b)〜l)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を記憶し(316)、kを1だけ増大し、段階e)において比較された符号が等しくない場合、段階b)から方法を続行し、
m)転がり軸受(20)の回転方向(sym)を求めるため、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(max_wert_t)と今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)との時間的関係を評価し(S203;S204,S206;S224,S226)、それを出力し(S208;S228)、kを1だけ増大し、段階b)により方法を続行し、
その際c0に対して0<c0<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項11】
段階m)が、現在の段階d)の(k+1)番目の計算値x(k+1)が段階d)の以前の実行の対応するk番目の計算値x(k)より大きいか否かの比較(S203)を含み、次の段階を含む
n)段階m)における比較が正である場合、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)から最小補助変数(min_t_ref)を減算し(S204)、結果を2で除算し、これに最小補助変数(min_t_ref)を加算し、これから今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(man_wert_t)を減算し、続いて結果の符号(sym)を決定し、続いて今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を新しい最小補助変数(min_t_ref)として引継ぎ、この符号(sym)を、転がり軸受(20)の回転方向に相当する値として出力し(S208)、kを1だけ増大し、段階b)により方法を続行し、段階d)において今まで計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(man_wert_t)から最大補助変数(man_t_ref)を減算し(S224)、結果を2で除算し、これに最大補助変数を加算し、これから今まで段階d)において計算された計算値x(k+1)の最小値の出現の時点(min_wert_t)を減算し、続いて結果の符号(sym)を決定し、続いて今まで段階d)において計算された(k+1)の最大値の出現の時点(man_wert_t)を新しい最大補助変数(man_t_ref)として引継ぎ、この符号(sym)を転がり軸受(20)の回転方向に相当する値として出力し、kを1だけ増大し、段階b)から方法を続行する
ことを特徴とする、請求項10に記載の方法。
【請求項12】
正の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最大値(man_wert)より大きいか否かの検査(S304)を実行し、そうである場合、この(k+1)番日の計算値x(k+1)の出現の時点(man_wert_t)を記憶し(S306)、
負の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最小値(min_wert)より小さいか否かの検査(S314)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を記憶する(S316)
ことを特徴とする、請求項10又は11に記載の方法。
【請求項13】
作動パラメータとして回転する転がり軸受(20)に作用する固体伝導音事象を求め、次の段階を含む
o)信号(40)の瞬時値をサンプリング開始値x*(0)として求めるため、時点k=0に信号(40)をサンプリングし、
p)濾波サンプル値v(k=0)を得るため、段階o)において得られるサンプリング開始値x*(0)を高域フィルタにおいて濾波し(S702)、
q)濾波サンプル値v(k=0)の2次の通常の統計的積率E{V2}(k=0)を、積率開始値として規定し、続いて順序変数を1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点(k+1)に信号(40)をサンプリングし、
r)濾波サンプル値v(k+1)を得るため、段階b)において得られたサンプル値x*(k+1)を高域フィルタにおいて濾波し、
s)濾波サンプル値v(k+1)に対する2次の通常の統計的積率u(k)=E{V2}(k+1)を、濾波サンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)と、濾波サンプル値v(k+1)の2乗からこの2次の通常の統計的積率E{V2}(k)を減算した結果に適合量c1を乗算した値との和として、計算し(S704)、
t)適当な定性的誤り信号を出力する(S720)か、又は適当な定量的誤り値(output;output_max)を出力し(S710;S716)、なるべくkを1だけ増大し、段階b)から方法を続行し、
その際c1に対して0<c1<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項14】
段階s)とt)の間で次の段階を実行する
u)u(k+1)に対する2次の通常の統計的積率E{U2}(k+1)を、u(k)の2次の期待値E{U2}(k)と、2次の通常の統計的積率u2(k+1)から2次の通常の統計的積率E{U2}(k)を減算した結果に適合量c2を乗算した値との和として、計算し(S706)、
v)u(k+1)の期待値E{U}(k+1)を、u(k)の期待値E{U}(k)と、2次の通常の統計的積率u(k+1)から期待値E{U}(k)を減算した結果に適合量c3を乗算した値との和として、計算し(S707)、
w)段階u)の結果から段階v)の結果の2乗を減算した結果の値として、分散σ2(k+1)を計算し(S708)、
その際c2及びc3に対して0<c2<1及び0<c3<1が成立するようにする
ことを特徴とする、請求項13に記載の方法。
【請求項15】
段階s)を飛び越え、第2の通常の統計的積率u(k)の代わりに濾波サンプル値v(k)を使用することを特徴とする、請求項14に記載の方法。
【請求項16】
段階t)の定量的誤り値(output)の最大値を、最大誤り値(output_max)として記憶する(S714)ことを特徴とする、請求項13〜15の1つに記載の方法。
【請求項17】
計算費用を最小にするため、適合量c0,c1,c2又はc3の1つ又は複数を定数として選ぶか、又は計算精度、計算速度及び/又は計算安定性を最大にするため、動的変数として選ぶことを特徴とする、請求項2〜16の1つに記載の方法。
【請求項18】
複数の作動パラメータを決定する際、それぞれ同じ文字を付けられるような段階を反復して実行する必要がないようにすることを特徴とする、請求項4〜7の1つに記載の方法。
【請求項19】
転がり軸受(20)が、この転がり軸受に取付けられるセンサ装置(26;27;29)を含み、このセンサ装置が、転がり軸受(20)の回転の際、その回転位置に関係する波状信号(40)を供給するものにおいて、請求項1〜18による方法の少なくとも1つに記載の段階を実行する手段を含んでいることを特徴とする、転がり軸受(20)の回転数を求めるためのコンピュータプログラム製品。
【請求項20】
z個の転動体(24)を持つ転がり軸受であって、zが整数なるべく偶数であり、転がり軸受(20)の作動パラメータを求める装置が、
少なくとも1つ場合によってはzより多くなるべくz/2まで転がり軸受(20)の周方向に分布して設けられかつ転がり軸受(20)に取付けられるセンサ装置(26;27;29)を含み、各センサ装置(26;27;29)が、転がり軸受(20)の回転の際その回転位置に関係する波状信号(40)を供給し、かつ
少なくとも1つ場合によってはzより多くなるべくz/2までの評価装置(50)を含み、各評価装置(50)がそれぞれ1つのセンサ装置(26;27;29)に接続され、
各評価装置(50)が、請求項1〜18に記載の方法の少なくとも1つに記載の段階を実行するための評価ユニット(51〜55)を含んでいる
ことを特徴とする、転がり軸受。
【請求項21】
各センサ装置(26;27;29)が、
ホイートストンブリッジとなるように接続される4つのひずみ計(31〜34;31,32’,33,34’;36〜39)から形成され、これらのひずみ形が転がり軸受(20)の周方向に順次に設けられ、各センサ装置(26;27;29)の第1のひずみ計(31;36)及び第3のひずみ計(33;38)と、各センサ装置(26;27;29)の第2のひずみ計(32;32’;37)及び第4のひずみ計(34,34’;39)とが、周方向に、2つの隣接する転動体(24)の間隔のn倍の相互間隔を持つか、又は
それぞれ1つのホイートストンブリッジとなるように接続される2つのひずみ計から成形され、
転動体(24)がひずみ計(31〜34;31,32’,33,34’;36〜39)上を転がることによって、信号(40)の発生が行われ、nが1より大きいか又はこれに等しい整数である
ことを特徴とする、請求項20に記載の転がり軸受。
【請求項22】
ひずみ計(31〜34;31,32’,33,34’;36〜39)と、少なくとも1つなるべくz/2までの評価装置(50)が、転がり軸受(20)の外レース(22)の取り囲む外側溝(23)に設けられていることを特徴とする、請求項21に記載の転がり軸受。
【請求項23】
各評価ユニット(51〜55)及びなるべく各評価装置(50)が電気回路なるべくASICとして構成されていることを特徴とする、請求項20〜22の1つに記載の転がり軸受。
【請求項1】
回転する転がり軸受(20)の特に回転数、回転方向、半径方向力、軸線方向力又は固体伝導音事象のような作動パラメータを求める方法であって、転がり軸受(20)にセンサ装置(26;27;29)が取付けられて、転がり軸受(20)の回転の際その回転位置に関係する波状信号(40)を供給し、この信号(40)がサンプリング点k,k+1,k+2,・・・でサンプリングされ、それによりサンプル値x*(k),x*(k+1),x*(k+2),・・・が求められ、
A)評価により回転数、回転方向、半径方向力及び/又は軸線方向力を求めるため、信号(40)と交差しかつその包絡線にほぼ平行である補助線(42)が作図され、作動パラメータがこれに基いて求められ、かつ/又は
B)固体伝導音事象を求めるため、濾波サンプル値v(k),v(k+1),v(k+2),・・・を得るための高域フィルタ(59)において、サンプル値x*(k),x*(k+1),x*(k+2),・・・が濾波され、濾波サンプル値v(k),v(k+1),v(k+2)の少なくとも2次の統計的積率E{V2}(k),E{V2}(k+1),E{V2}(k+2)の評価により、現れる固体伝導音が求められ、
ここでkは経過した時間の順序変数としての整数である、作動パラメータを求める方法。
【請求項2】
作動パラメータとして回転数を求め、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて順序変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められた(k+1)番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実効の対応するk番目の計算値x(k)の符号と比較し(S102)、
f)段階e)において比較された符号が同じである場合、kを1だけ増大し、段階b)〜f)を反復し、そうでない場合現在の段階d)の(k+1)番目の計算値x(k+1)が段階d)の以前の実行のk番目の計算値x(k)より大きいか否かを比較し(S203)、
g)段階f)でx(k+1)>x(k)が生じる場合、段階e)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(tauf1,tauf2)を規定し(S210,S212,S214)、kを1だけ増大し、段階f)において再びx(k+1)>x(k)が生じるまで、段階b)〜g)を反復し、そうでない場合、段階e)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(tab1,tab2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g)を反復し、
h)段階g)における異なる実行において求められた時点(tauf1,tauf2;tab1,tab2)の差(ΔTauf;ΔTab)を形成し(S404;S504)、この差(ΔTauf;ΔTab)を、転がり軸受(20)の回転数に相当する値として出力し(S510;S410)、かつなるべく段階b)から方法を続行し、
c0に対して0<c0<1が成立するようにする
請求項1に記載の方法。
【請求項3】
段階g)における異なる実行において規定される時点(tauf1,tauf2;tab1,tab2)を、段階f)からの等しくない符号を持つ両方の計算値の間の補間(S212;232)により求めることを特徴とする、請求項2に記載の方法。
【請求項4】
作動パラメータとして軸線方向力が転がり軸受(20)に加わる際波状信号(40)が変化するように、センサ装置(29,36,37,38,39)を構成し、次の段階を含む、
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて順序変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d1)段階b)において求められた(k+1)番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、補助量(hub,hlf)を加算し、結果を(k+l)番目の計算値x(k+1)として使用し、
e1)段階d1)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d1)の以前の実行の対応するk番目の計算値x(k)の符号と比較し(S102)、
f1)段階e1)において比較された符号が同じである場合、kを1だけ増大し、段階b)〜f1)を反復し、そうでない場合現在の段階d1)の(k+1)番目の計算値x(k+1)が段階d1)の以前の実行のk番目の計算値x(k)より大きいか否かを比較し(S203)、
g1)段階f1)でx(k+1)>x(k)が生じる場合、段階e1)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(tauf1,tauf2)を規定し(S210,S212,S214)、kを1だけ増大し、段階f1)において再びx(k+1)>x(k)が生じるまで、段階b)〜g1)を反復し、そうでない場合、段階e1)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(tauf1,tauf2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f1)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g1)を反復し、
i1)段階g1)の第2の選択肢において規定された時点(tab2)を、段階g1)の第1の選択肢において規定された時点(tauf2)から減算し、差を負の半波の時間間隔(Δt_nhw)として使用し、
d2)段階c)において計算された(k+1)番目の評価値E(x*(k+1))及び補助量(hub・hlf)を、段階b)において求められたk+1番目のサンプル値x*(k+1)から減算し(S601)、結果を(k+1)番目の計算値y(k+1)として使用し、
e2)段階d2)において計算された(k+1)番目の計算値y(k+1)の符号を、段階d2)の以前の実行の対応するk番目の計算値y(k)の符号と比較し(S602)、
f2)段階e2)において比較される符号が等しい場合、kを1だけ増大し、段階b)〜f2)を反復し、そうでない場合、現在の段階d2)の(k+1)番目の計算値y(k+1)が段階d2)の以前の実行の対応するk番目の計算値y(k)より大きいか否か比較し(S603)、
g2)段階f)でx(k+1)>x(k)が生じる場合、段階e2)において求められて等しくない符号を持つ両方の計算値の間の符号がこの上昇する方向に変化した時点(t*auf1,t*auf2)を規定し(S610,S612,S614)、kを1だけ増大し、段階f2)において再びx(k+1)>x(k)が生じるまで、段階b)〜g2)を反復し、そうでない場合、段階e2)において求められて等しくない符号を持つ両方の計算値の間の符号がこの低下する方向に変化した時点(t*ab1,t*ab2)を規定し(S230,S232,S234)、kを1だけ増大し、段階f2)において再びx(k+1)>x(k)が成立しない事態が生じるまで、段階b)〜g2)を反復し、
i2)段階g2)の第1の選択肢において規定された時点(t*auf2)を、段階g2)の第2の選択肢において規定された時点(t*ab2)から減算し、差を正の半波の時間間隔(Δt_phw)として使用し、
その際段階d2)〜i2)がなるべく段階d1)〜i1)と並行して経過するようにし、
j) 段階i1)及びi2)において求められた時間間隔(Δt_nhw,Δt_phw)の差(Δt_phw−Δt_nhw)を形成し(S408,S508)、
この差(Δt_phw−Δt_nhw)の符号(ax_dir)を、転がり軸受(20)に作用する軸線方向力の方向に相当する値として出力し(S510;S410)、その際c0に対して0<c0<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項5】
段階g1)及びg2)において規定された時点(tauf1,tauf2;tab1,tab2;t*auf1,t*auf2;t*ab1,t*ab2)を、段階f1)又はf2)からの等しくない符号を持つそれぞれ両方の計算値の間の補間(S212;S232;S612;S632)により求めることを特徴とする、請求項4に記載の方法。
【請求項6】
軸線方向力の大きさの尺度として、段階j)において形成された差(Δt_phw−Δt_nhw)の値(ax_for)の計算(S409,S509)を実行し、かつ出力することを特徴とする、請求項4又は5に記載の方法。
【請求項7】
作動パラメータとして半径方向力を求め、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて実行変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められたk+1番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実効の対応するk番目の計算値x(k)の符号と比較し(S102)、
k)段階e)において比較された符号が同じである場合、段階d)の(k+1)番目の計算値x(k+1)の符号が正であるか否か検査し(S302),正の符号が生じる場合、段階e)において等しくない符号が検出されるまで、段階b)〜k)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値(max_wert)を記憶し(S305)、そうでない場合、段階e)において等しくない符号が検出されるまで、段階b)〜k)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値(min_wert)を記憶し(S315)、段階d)において計算されたこれらの(k+1)番目の計算値x(k+1)の最大値(max_wert)と最小値(min_wert)との差(hub)を計算し、この差(hub)を転がり軸受(20)に作用する半径方向力に相当する値として出力し(S108),なるべくkを1だけ増大し、段階b)から方法を続行し、段階e)において比較された符号が等しくない場合、段階d)において計算された(k+1)番目の計算値x(k+1)の最大値(max_wert)又は最小値(min_wert)を0にリセットし、kを1だけ増大し、段階b)により方法を続行し、
その際c0に対して0<c0<1が成立するようにする、
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項8】
段階k)において正の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最大値(max_wert)より大きいか否かの検査(S304)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)を、差(hub)の計算(S308)のため新しい最大値(max_wert)として記憶し(S305)、
負の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最小値(min_wert)より小さいか否かの検査(S314)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)を、差(hub)の計算(S308)のため新しい最小値(min_wert)として記憶する(S315)
ことを特徴とする、請求項7に記載の方法。
【請求項9】
段階k)の第1の実際の際、差(hub)を更に最大差(hub_max)として記憶し、段階k)の各実行の際、現在計算される差(hub)の値が最大差(hub_max)より大きいか否かの比較(S110)を実行し、そうである場合、この現在計算される差(hub)を、なるべく利用者により消去可能な新しい最大差(hub_max)として記憶することを特徴とする、請求項7又は8に記載の方法。
【請求項10】
作動パラメータとして回転方向を求め、波状信号(40)が異なる回転方向では異なるようにセンサ装置(25,31,32’,33,34’)を構成し、次の段階を含む
a)開始時点k=0用信号(40)の期待値として評価値E(x*(k=0))の開始値を規定し、信号(40)の瞬時値をサンプリング開始値x*(0)として求める時点k=0に信号(40)をサンプリングし、続いて実行変数kを1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点k+1に信号(40)をサンプリングし、
c)k番目の評価値E(x*(k))と、適合量c0と(k+1)番目のサンプル値x*(k+1)からk番目の評価値E(x*(k))の減算の結果との積の和として、(k+1)番目の評価値E(x*(k+1))を計算し(S100)、
d)段階b)において求められたk+1番目のサンプル値x*(k+1)から、段階c)において計算された(k+1)番目の評価値E(x*(k+1))を減算し(S101)、差を(k+l)番目の計算値x(k+1)として使用し、
e)段階d)で計算された(k+1)番目の計算値x(k+1)の符号を、段階d)の以前の実行の対応するk番目の計算値x(k)の符号と比較し(S102)、
l)段階e)において比較された符号が同じである場合、段階d)の(k+1)番目の計算値x(k+1)の符号が正であるか否かを検査し(S302)、正の符号が生じる場合、段階e)において等しくない符号が検出されるまで、段階b)〜l)を反復し、今まで段階dにおいて計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(max_wert_t)を記憶し(S306)、そうでない場合、段階e)において等しくない符号が検出されるまで、段階b)〜l)を反復し、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を記憶し(316)、kを1だけ増大し、段階e)において比較された符号が等しくない場合、段階b)から方法を続行し、
m)転がり軸受(20)の回転方向(sym)を求めるため、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(max_wert_t)と今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)との時間的関係を評価し(S203;S204,S206;S224,S226)、それを出力し(S208;S228)、kを1だけ増大し、段階b)により方法を続行し、
その際c0に対して0<c0<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項11】
段階m)が、現在の段階d)の(k+1)番目の計算値x(k+1)が段階d)の以前の実行の対応するk番目の計算値x(k)より大きいか否かの比較(S203)を含み、次の段階を含む
n)段階m)における比較が正である場合、今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)から最小補助変数(min_t_ref)を減算し(S204)、結果を2で除算し、これに最小補助変数(min_t_ref)を加算し、これから今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(man_wert_t)を減算し、続いて結果の符号(sym)を決定し、続いて今まで段階d)において計算された(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を新しい最小補助変数(min_t_ref)として引継ぎ、この符号(sym)を、転がり軸受(20)の回転方向に相当する値として出力し(S208)、kを1だけ増大し、段階b)により方法を続行し、段階d)において今まで計算された(k+1)番目の計算値x(k+1)の最大値の出現の時点(man_wert_t)から最大補助変数(man_t_ref)を減算し(S224)、結果を2で除算し、これに最大補助変数を加算し、これから今まで段階d)において計算された計算値x(k+1)の最小値の出現の時点(min_wert_t)を減算し、続いて結果の符号(sym)を決定し、続いて今まで段階d)において計算された(k+1)の最大値の出現の時点(man_wert_t)を新しい最大補助変数(man_t_ref)として引継ぎ、この符号(sym)を転がり軸受(20)の回転方向に相当する値として出力し、kを1だけ増大し、段階b)から方法を続行する
ことを特徴とする、請求項10に記載の方法。
【請求項12】
正の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最大値(man_wert)より大きいか否かの検査(S304)を実行し、そうである場合、この(k+1)番日の計算値x(k+1)の出現の時点(man_wert_t)を記憶し(S306)、
負の符号について、段階d)の(k+1)番目の計算値x(k+1)が今まで求められた最小値(min_wert)より小さいか否かの検査(S314)を実行し、そうである場合、この(k+1)番目の計算値x(k+1)の最小値の出現の時点(min_wert_t)を記憶する(S316)
ことを特徴とする、請求項10又は11に記載の方法。
【請求項13】
作動パラメータとして回転する転がり軸受(20)に作用する固体伝導音事象を求め、次の段階を含む
o)信号(40)の瞬時値をサンプリング開始値x*(0)として求めるため、時点k=0に信号(40)をサンプリングし、
p)濾波サンプル値v(k=0)を得るため、段階o)において得られるサンプリング開始値x*(0)を高域フィルタにおいて濾波し(S702)、
q)濾波サンプル値v(k=0)の2次の通常の統計的積率E{V2}(k=0)を、積率開始値として規定し、続いて順序変数を1だけ増大し、
b)信号(40)の瞬時値を(k+1)番目のサンプル値x*(k+1)として求めるため、時点(k+1)に信号(40)をサンプリングし、
r)濾波サンプル値v(k+1)を得るため、段階b)において得られたサンプル値x*(k+1)を高域フィルタにおいて濾波し、
s)濾波サンプル値v(k+1)に対する2次の通常の統計的積率u(k)=E{V2}(k+1)を、濾波サンプル値v(k)に対する2次の通常の統計的積率E{V2}(k)と、濾波サンプル値v(k+1)の2乗からこの2次の通常の統計的積率E{V2}(k)を減算した結果に適合量c1を乗算した値との和として、計算し(S704)、
t)適当な定性的誤り信号を出力する(S720)か、又は適当な定量的誤り値(output;output_max)を出力し(S710;S716)、なるべくkを1だけ増大し、段階b)から方法を続行し、
その際c1に対して0<c1<1が成立するようにする
ことを特徴とする、先行する請求項の1つに記載の方法。
【請求項14】
段階s)とt)の間で次の段階を実行する
u)u(k+1)に対する2次の通常の統計的積率E{U2}(k+1)を、u(k)の2次の期待値E{U2}(k)と、2次の通常の統計的積率u2(k+1)から2次の通常の統計的積率E{U2}(k)を減算した結果に適合量c2を乗算した値との和として、計算し(S706)、
v)u(k+1)の期待値E{U}(k+1)を、u(k)の期待値E{U}(k)と、2次の通常の統計的積率u(k+1)から期待値E{U}(k)を減算した結果に適合量c3を乗算した値との和として、計算し(S707)、
w)段階u)の結果から段階v)の結果の2乗を減算した結果の値として、分散σ2(k+1)を計算し(S708)、
その際c2及びc3に対して0<c2<1及び0<c3<1が成立するようにする
ことを特徴とする、請求項13に記載の方法。
【請求項15】
段階s)を飛び越え、第2の通常の統計的積率u(k)の代わりに濾波サンプル値v(k)を使用することを特徴とする、請求項14に記載の方法。
【請求項16】
段階t)の定量的誤り値(output)の最大値を、最大誤り値(output_max)として記憶する(S714)ことを特徴とする、請求項13〜15の1つに記載の方法。
【請求項17】
計算費用を最小にするため、適合量c0,c1,c2又はc3の1つ又は複数を定数として選ぶか、又は計算精度、計算速度及び/又は計算安定性を最大にするため、動的変数として選ぶことを特徴とする、請求項2〜16の1つに記載の方法。
【請求項18】
複数の作動パラメータを決定する際、それぞれ同じ文字を付けられるような段階を反復して実行する必要がないようにすることを特徴とする、請求項4〜7の1つに記載の方法。
【請求項19】
転がり軸受(20)が、この転がり軸受に取付けられるセンサ装置(26;27;29)を含み、このセンサ装置が、転がり軸受(20)の回転の際、その回転位置に関係する波状信号(40)を供給するものにおいて、請求項1〜18による方法の少なくとも1つに記載の段階を実行する手段を含んでいることを特徴とする、転がり軸受(20)の回転数を求めるためのコンピュータプログラム製品。
【請求項20】
z個の転動体(24)を持つ転がり軸受であって、zが整数なるべく偶数であり、転がり軸受(20)の作動パラメータを求める装置が、
少なくとも1つ場合によってはzより多くなるべくz/2まで転がり軸受(20)の周方向に分布して設けられかつ転がり軸受(20)に取付けられるセンサ装置(26;27;29)を含み、各センサ装置(26;27;29)が、転がり軸受(20)の回転の際その回転位置に関係する波状信号(40)を供給し、かつ
少なくとも1つ場合によってはzより多くなるべくz/2までの評価装置(50)を含み、各評価装置(50)がそれぞれ1つのセンサ装置(26;27;29)に接続され、
各評価装置(50)が、請求項1〜18に記載の方法の少なくとも1つに記載の段階を実行するための評価ユニット(51〜55)を含んでいる
ことを特徴とする、転がり軸受。
【請求項21】
各センサ装置(26;27;29)が、
ホイートストンブリッジとなるように接続される4つのひずみ計(31〜34;31,32’,33,34’;36〜39)から形成され、これらのひずみ形が転がり軸受(20)の周方向に順次に設けられ、各センサ装置(26;27;29)の第1のひずみ計(31;36)及び第3のひずみ計(33;38)と、各センサ装置(26;27;29)の第2のひずみ計(32;32’;37)及び第4のひずみ計(34,34’;39)とが、周方向に、2つの隣接する転動体(24)の間隔のn倍の相互間隔を持つか、又は
それぞれ1つのホイートストンブリッジとなるように接続される2つのひずみ計から成形され、
転動体(24)がひずみ計(31〜34;31,32’,33,34’;36〜39)上を転がることによって、信号(40)の発生が行われ、nが1より大きいか又はこれに等しい整数である
ことを特徴とする、請求項20に記載の転がり軸受。
【請求項22】
ひずみ計(31〜34;31,32’,33,34’;36〜39)と、少なくとも1つなるべくz/2までの評価装置(50)が、転がり軸受(20)の外レース(22)の取り囲む外側溝(23)に設けられていることを特徴とする、請求項21に記載の転がり軸受。
【請求項23】
各評価ユニット(51〜55)及びなるべく各評価装置(50)が電気回路なるべくASICとして構成されていることを特徴とする、請求項20〜22の1つに記載の転がり軸受。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図12】

【図13】
【図14】
【図15】

【図16a】
【図16b】
【図16c】

【図16d】
【図16e】
【図16f】

【図16g】

【図16h】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16a】
【図16b】
【図16c】
【図16d】
【図16e】
【図16f】
【図16g】
【図16h】
【公表番号】特表2008−501959(P2008−501959A)
【公表日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願番号】特願2007−519637(P2007−519637)
【出願日】平成17年6月8日(2005.6.8)
【国際出願番号】PCT/EP2005/006143
【国際公開番号】WO2005/121809
【国際公開日】平成17年12月22日(2005.12.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(506420843)シエフレル・コマンデイトゲゼルシヤフト (80)
【Fターム(参考)】
【公表日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願日】平成17年6月8日(2005.6.8)
【国際出願番号】PCT/EP2005/006143
【国際公開番号】WO2005/121809
【国際公開日】平成17年12月22日(2005.12.22)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.フロッピー
【出願人】(506420843)シエフレル・コマンデイトゲゼルシヤフト (80)
【Fターム(参考)】
[ Back to top ]